Изобретение относится к способам ввода информации о дальности до цели в вычислительную систему (например, в баллистический вычислитель системы управления снарядами для последующего вычисления траектории их наведения) с предварительным измерением дальности, которое производится с помощью цифровой системы определения дальности. Устройство для ввода информации о дальности в вычислитель может работать как в составе лазерного дальномера или дальномера-подсветчика, так и в составе радарной установки. Изобретение может быть использовано для измерения дальности и ввода информации о дальности до цели в вычислитель системы управления снарядами для комплексов вооружения, например: противотанковых (ПТРК) или зенитных (ЗРК) ракетных комплексов. Кроме того, заявляемое изобретение может быть использовано и для ввода информации в ЭВМ системы управления космическими и баллистическими ракетами при решении вычислительной машиной задачи встречи ракеты с целью. Особенно успешное применение изобретения предполагается для ввода информации о дальности до цели в баллистический вычислитель системы управления снарядами для комбинированных комплексов вооружения, предназначенных для поражения различных типов целей и использующих для этого различные типы боеприпасов.
Одной из основных задач при измерении дальности является селекция целей. Для селекции целей могут использоваться различные схемы, например селекция целей по порядку прихода сигнала отклика от целей [1, 2] или селекция целей по нахождению их в заданном интервале дальностей [3] .
Чаще всего в современных армейских дальномерах, например, таких как 1Д18 [4] , LP7 [5] , LRR-103 [6] , AN/GVS-5, LF11, LF14 [7] , используется способ измерения дальности с использованием строба-регулятора минимальной дальности, при котором отсекаются цели, расположенные ближе заданной дальности. Выходная информация такого дальномера может вводиться в баллистический вычислитель для вычисления траектории артиллерийских неуправляемых снарядов.
При использовании такого способа измерения дальности (селекции целей) с последующим вводом данных измерения в баллистический вычислитель системы управления снарядами для комплекса, имеющего в составе как неуправляемое, так и управляемое вооружение, проявляется неприспособленность способа для расчета траектории управляемых снарядов. Неприспособленность проявляется в отсутствии помехозащищенности от "ложных" целей, расположенных за выбранной. Такая помеха может иметь место при низкой отражающей способности выбранной цели в рабочем диапазоне длин волн дальномера или при ошибках наведения на выбранную цель. При использовании баллистическим вычислителем информации о дальности до цели для расчета траектории наведения управляемых снарядов полученные им данные дальности от дальней "ложной" цели могут привести к промаху, причина которого пояснена в следующем абзаце.
Большинство систем наведения управляемых снарядов для повышения своей помехозащищенности используют маневр снаряда при полете к цели, заключающийся в отклонении снаряда от линии визирования цели в начальной фазе полета и выведении его на линию визирования на подлете к цели. Наличие на выходе дальномера ложной дальности, превышающей реальную, приводит к запоздалому выведению снаряда на линию визирования и, следовательно, к промаху.
При применении комплексом зенитного оружия по скоростным низколетящим целям необходимо проводить серию замеров дальности с достаточной частотой для расчета баллистическим вычислителем траектории и скорости движения цели и введения необходимого упреждения при стрельбе. В таком режиме измерений может быть полезен способ измерения дальности и ввода информации о ней в вычислитель с отсечением заднего фона, поскольку достаточно вероятны промахи зондирующего цель излучения, а результаты замеров дальности от фона могут привести к сбоям вычислителя и неправильному расчету траектории и скорости движения цели.
Наиболее близкий по технической сущности к предлагаемому способ измерения дальности (селекции целей) с выводом информации на внешнее устройство можно осуществить с помощью селективной системы, описанной в патенте [3] . Эта система позволяет проводить измерение дальности в диапазоне, ограниченном минимальной и максимальной регулируемыми дальностями, и выводить информацию о дальности на выход системы, предназначенный для подключения внешних устройств. Однако система требует раздельной установки минимальной и максимальной измеряемых дальностей, что приводит к дополнительной загрузке оператора комплекса и снижению быстродействия системы при таком способе ввода информации.
Отрицательно сказывается на работе системы при расчете траектории снаряда, использующего вышеуказанный маневр, отсутствие в ее баллистическом вычислителе информации о дальности при отсутствии отраженного импульса на входе приемного устройства дальномера, присущее всем вышеописанным способам определения дальности. Данная ситуация требует принудительного ввода информации о дальности в вычислитель для расчета приемлемой траектории полета снаряда, иначе (в случае отсутствия в системе информации о дальности или присутствия нулевой дальности) снаряд полетит прямой наводкой, что приводит к повышению риска срыва управления из-за задымленности поля управления продуктами сгорания стартового двигателя. Присутствие же на входе баллистического вычислителя информации о дальности, оставшейся от предыдущей (по времени обработки) цели и превышающей значение дальности до цели, настоящей приведет к гарантированному промаху управляемого снаряда по причине, указанной выше.
Задачей изобретения является создание универсального автоматизированного способа ввода информации о дальности до цели в баллистический вычислитель системы управления снарядами многоцелевого (использующего различные типы управляемого и неуправляемого вооружения) комплекса вооружения. Способ должен обеспечивать повышенную помехоустойчивость при работе комплекса управляемыми снарядами, использующими в полете маневр с отклонением от линии визирования. С другой стороны, способ должен позволять оператору вмешиваться в процесс ввода информации и принимать решение о проведении или не проведении выстрела по имеющейся в системе информации о дальности и, в случае необходимости, позволять оператору самостоятельный ввод информации без проведения замера дальности.
Задачей изобретения является также создание устройства для осуществления вышеуказанного способа.
Способ должен автоматически обеспечивать выбор необходимого режима измерения дальности для различных типов снарядов и различных типов целей при выборе оператором комплекса типа оружия. Для одних типов снарядов, например неуправляемых, удобно измерение дальности в диапазоне, ограниченном только минимальной регулируемой дальностью, для других, например использующих маневр управляемых снарядов, для повышения помехоустойчивости необходимо задание диапазона, ограниченного регулируемыми значениями с двух сторон (как это было показано выше). При этом задание такого диапазона должно осуществляться без введения дополнительных органов управления, которое привело бы к дополнительной загрузке оператора комплекса. При расчете баллистическим вычислителем траектории и скорости низколетящей скоростной цели удобно измерение дальности в диапазоне, ограниченном только максимальной регулируемой дальностью.
Для автоматизации процесса ввода информации также необходимо, чтобы в случае отсутствия на входе приемного устройства системы определения дальности отклика от цели в вычислитель автоматически вводилось значение дальности, незначительно отличающееся от реального в сторону меньших значений, например равное установленному. Это позволит всегда иметь в вычислителе информацию о дальности по желанию оператора. Принудительное введение дальности извне после неудачной попытки ее измерения может приводить к задержкам срабатывания исполнительных механизмов, задающих начальное отклонение снаряда и, следовательно, к задержкам его пуска.
Для вмешательства оператора в процесс ввода информации о дальности должна быть предусмотрена и возможность принудительного ввода дальности вручную без ее измерения (в качестве дублирующего режима). Это бывает необходимо для ускорения процесса поражения цели, когда дальность заранее известна или, когда измеренное значение не удовлетворяет условиям стрельбы (условиям задачи встречи снаряда с целью), или в случае выхода из строя приемопередатчика.
Для решения поставленных задач предлагается способ ввода информации о дальности до цели в баллистический вычислитель системы управления снарядами, заключающийся в измерении дальности до цели с помощью дальномера в ограниченном диапазоне дальностей и последующем вводе значения дальности в вычислитель. Предлагаемый способ отличается тем, что предварительно устанавливают одно регулируемое значение дальности, преобразовывают его в граничные значения диапазона измеряемых дальностей, а после измерения дальности до цели дальномером вводят в вычислитель либо измеренное значение, если оно удовлетворяет условиям задачи встречи снаряда с целью, либо установленное, если измеренное значение условиям задачи не удовлетворяет. Границы диапазона измеряемых дальностей выбираются в зависимости от установленного значения дальности, типа цели и типа снаряда. Установленное значение, кроме того, используется при необходимости ввода в вычислитель независимой от показаний дальномера информации, например при вводе информации без измерения дальности.
Предлагаемый способ универсален в том смысле, что позволяет использовать несколько режимов измерения дальности в зависимости от вида используемого комплексом вооружения или в зависимости от типа цели, причем оператором устанавливается только одно регулируемое значение дальности, которое по разному используется в различных режимах для преобразования в соответствующие граничные значения диапазона измеряемых дальностей. Для этого задается набор законов преобразования этого устанавливаемого значения и определяется соответствие каждого закона определенному режиму измерения, также определяется для преобразования в какую границу диапазона измеряемых дальностей (минимальную или максимальную) либо в какое промежуточное значение предназначен каждый закон.
РЕЖИМ 1. При использовании комплексом определенного типа снарядов по определенному типу цели установленное значение служит для ограничения диапазона измеряемой дальности снизу и для автоматической установки значения, ограничивающего диапазон измеряемой дальности сверху в соответствии с одним из законов преобразования. Можно ограничить диапазон снизу не установленным значением, а одним из значений набора законов преобразования. Режим позволяет устанавливать максимальную измеряемую дальность Dmax в зависимости от установленной Dуст или от минимальной измеряемой Dmin, т. е. Dmax= f(Dуст) или Dmax= f(Dmin). РЕЖИМ 1 используется предпочтительно при использовании комплексом управляемого вооружения и имеет несколько подрежимов. Подрежимы разнятся конкретным видом используемого закона преобразования Dmax= f(Dуст), определяемым конкретным типом используемых управляемых снарядов.
РЕЖИМ 2. При использовании комплексом определенного типа снарядов по определенному типу цели установленное значение служит для ограничения диапазона измеряемой дальности снизу. Можно ограничить диапазон снизу не установленным значением, а одним из значений набора законов преобразования.
РЕЖИМ 3. При использовании комплексом определенного типа снарядов по определенному типу цели установленное значение служит для ограничения диапазона измеряемой дальности сверху. Можно ограничить диапазон сверху не установленным значением, а одним из значений набора законов преобразования.
При необходимости (например, при выходе из строя измерительного устройства или когда необходим экстренный ввод данных) способ дополнен РЕЖИМОМ ПРИНУДИТЕЛЬНОГО ВВОДА ИНФОРМАЦИИ. Для принудительного ввода дальности в вычислитель служит ее установленное значение. Данные вводятся независимо от показаний дальномера, причем в вычислитель может вводиться как само установленное значение, так и значение, получаемое из него путем преобразования по одному из заданных законов (промежуточное значение).
В качестве варианта описанного способа предлагается автоматизированный способ, заключающийся в измерении дальности до цели с помощью дальномера без ограничения диапазона измерений, но при этом также предварительно устанавливают одно регулируемое значение дальности. Этот вариант тоже позволяет использовать несколько режимов измерения дальности в зависимости от вида используемого комплексом вооружения или в зависимости от типа цели.
Способ заключается в измерении дальности до цели с помощью дальномера и последующем вводе значения дальности в вычислитель и отличается тем, что предварительно устанавливается одно регулируемое значение дальности, которое затем преобразовывают в граничные значения диапазона измеряемых дальностей и в промежуточное значение, а после измерения дальности вводят в вычислитель либо измеренное значение, если оно удовлетворяет условиям задачи встречи снаряда с целью, либо промежуточное, если измеренное значение условиям задачи не удовлетворяет или при необходимости ввода в вычислитель независимой от показаний дальномера информации.
Способ позволяет, как и в первом варианте, предварительно задавать набор законов преобразования одного устанавливаемого регулируемого значения в минимальную или максимальную границы диапазона дальностей либо в промежуточное значение, устанавливая при этом соответствие каждого закона определенному типу цели и определенному типу снаряда, а также определенному режиму измерения. Затем уже - выбирать, в зависимости от конкретных типов цели и снаряда, необходимые законы и устанавливать минимальную и максимальную границы диапазона дальностей, выбирая также из заданного набора и закон для преобразования установленного значения дальности в промежуточное значение. После измерения дальности до цели дальномером в вычислитель автоматически вводится измеренное значение, если оно удовлетворяет условиям задачи встречи снаряда с целью. Если же измеренное значение не удовлетворяет условиям встречи снаряда с целью, в вычислитель вводится промежуточное значение, соответствующее выбранному для него закону. Промежуточное значение может вводиться также в случае необходимости ввода в вычислитель независимой от показаний дальномера информации.
В обоих предлагаемых вариантах в качестве условия задачи встречи снаряда с целью может быть выбрано условие попадания измеренного значения в ограниченный диапазон дальностей. При использовании в качестве критерия ввода дальности условия попадания измеренного значения в ограниченный диапазон значение автоматически устанавливающейся ширины диапазона для РЕЖИМА 1 определяется двумя основными факторами. Во-первых: динамическими характеристиками снаряда, которые в свою очередь могут зависеть от погодных условий (температуры, направления ветра) или, другими словами, от того, насколько быстро данный снаряд может быть выведен на линию визирования при подлете к цели. Во вторых: с учетом оговоренной выше возможности отсутствия отклика от цели, находящейся в заданном диапазоне, и автоматического ввода в таком случае в баллистический вычислитель установленного или промежуточного значения, от точности визуальной оценки оператором дальности до выбранной цели.
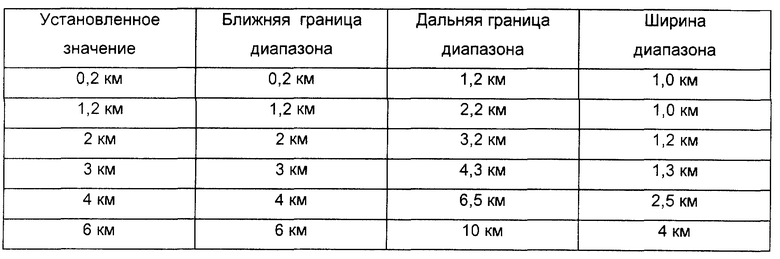
Ширина диапазона должна иметь оптимальную величину. С одной стороны, диапазон должен быть достаточно мал для минимизации вероятности промаха в случае нахождения реальной цели вблизи передней границы диапазона и получения отклика от ложной цели, расположенной у дальней границы диапазона. С другой стороны, должна быть сведена к минимуму вероятность непопадания выбранной цели в диапазон из-за неправильной визуальной оценки дальности оператором. Ошибка визуальной оценки дальности до цели возрастает пропорционально квадрату расстояния до нее [8] , поэтому ширина диапазона должна возрастать с увеличением расстояния до цели. Исходя из этого, нами выбран способ, позволяющий автоматически устанавливать ширину диапазона, возрастающую пропорционально значению установленной дальности.
Для реализации предлагаемых способов ввода информации о дальности в баллистический вычислитель системы управления снарядами предлагается устройство, включающее передатчик и приемник электромагнитной энергии, цифровой индикатор для отображения информации о дальности, выходную шину данных для выдачи информации на внешние устройства и счетчик импульсов, выход переполнения которого соединен с первым входом элемента "ИЛИ", второй вход которого соединен с выходом генератора тактовых импульсов, а выход - со счетным входом счетчика, выход передатчика соединен с входом установки в ноль счетчика, а выход приемника - с первым входом элемента "И". Поставленные задачи решаются за счет того, что в систему введены регистр установленной дальности Dуст, первая и вторая схемы сравнения, регистр выходных данных, ПЗУ, мультиплексор, триггер, второй элемент "ИЛИ" и шина управления, причем информационный выход счетчика импульсов соединен с первыми входами обеих схем сравнения и информационным входом регистра выходных данных, второй вход первой схемы сравнения соединен с первым выходом ПЗУ, а выход - со вторым входом элемента "И", третий вход которого соединен с выходом второй схемы сравнения, второй вход которой соединен со вторым выходом ПЗУ, младшие разряды адресного входа которого соединены с выходом регистра установленной дальности, старшие разряды адресного входа - с шиной управления, а третий выход - с первым входом мультиплексора, второй вход которого соединен с выходом регистра выходных данных, тактовый вход которого соединен с выходом элемента "И" и сбросовым входом триггера, вход установки которого соединен с выходом передатчика, а выход - с первым входом второго элемента "ИЛИ", второй вход которого соединен с шиной управления, а выход - с цифровым индикатором, выходной шиной и входом управления мультиплексора, выход которого соединен с выходной шиной и цифровым индикатором, который соединен с шиной управления.
Упрощенная схема предлагаемого устройства представлена на чертеже.
Устройство работает следующим образом. Стартовый импульс с передатчика 1 поступает на вход установки в исходное состояние счетчика импульсов 7 и вход установки в "единичное" состояние триггера 5, после чего на выходе счетчика 7 появляется логический "0" и сигнал со старшего разряда счетчика 7 поступает на первый вход элемента "ИЛИ" 4, разрешая тем самым проход тактовых импульсов с выхода генератора 3 на счетный вход счетчика 7. Сигналы с выхода счетчика 7 поступают на первые входы первой 11 и второй 10 схем сравнения и на информационный вход регистра выходных данных 9. При этом на второй вход первой схемы сравнения 11 поступает код минимальной дальности Dmin, присутствующий на первом выходе ПЗУ 13. На выходе первой схемы сравнения 11 будет присутствовать сигнал логического "0" до тех пор, пока содержимое счетчика 7 меньше значения кода минимальной дальности Dmin. Этот сигнал поступает на второй вход элемента "И" 6 и блокирует прохождение сигналов с приемника 2.
На второй вход второй схемы сравнения 10 поступает код максимальной дальности Dmax, присутствующий на втором выходе ПЗУ 13. Пока код на первом входе указанной схемы сравнения 10 (код выхода счетчика 7) меньше кода на втором ее входе (код максимальной дальности Dmax), на выходе ее формируется сигнал логической "1", который, поступая на третий вход элемента "И" 6, разрешает проход импульсов с выхода приемника 2.
Таким образом, элемент "И" 6 открыт (разрешает проход импульсов с выхода приемника 2) только тогда, когда значение дальности на выходе счетчика 7 превысило минимальное значение дальности Dmin, присутствующее на втором входе первой схемы сравнения 11, но не достигло максимального значения Dmax, присутствующего на втором входе второй схемы сравнения 10. Если в этот промежуток времени на вход приемника 2 поступит отраженный от цели сигнал, то он, пройдя через элемент "И" 6 на тактовый вход регистра выходных данных 9, зафиксирует в нем значение, содержащееся на данный момент времени в счетчике 7, т. е. измеренную дальность до цели. Одновременно сигнал с приемника 2 поступит на вход установки в нулевое состояние триггера 5, выходной сигнал которого поступает на первый вход элемента "ИЛИ" 8. При присутствии логического "0" и на втором входе элемента "ИЛИ" 8 сигнал логического "0" с выхода элемента "ИЛИ" 8 поступает на вход управления мультиплексора 12, разрешая проход информационных сигналов о дальности с выхода регистра выходных данных 9 через мультиплексор 12 на выходную шину 14 и на цифровой индикатор дальности 15.
Если же сигнал с приемника 2 не поступит в промежуток времени, ограниченный поступлением сигналов минимальной и максимальной дальности, то на выходе триггера 5 присутствует сигнал логической "1", который, проходя через элемент "ИЛИ" 8 на вход управления мультиплексора 12, разрешает проход через мультиплексор 12 (на индикатор дальности 15 и на выходную шину 14) кода Dвых.уст с третьего выхода ПЗУ 13, определяющего дальность в соответствии с выражением Dвых.уст= f(Dmin, Dmax) (или в простейшем случае на выход мультиплексора 12 через ПЗУ 13 может поступать непреобразованный код Dуст, установленный в регистре установленной дальности 17). Одновременно сигнал триггера поступит на выходную шину 14 и на цифровой индикатор 15 для отображения информации о том, что на выход системы поступает установленная Dвых.уст, а не измеренная дальность.
По заполнению счетчика 7 на его старшем разряде появляется сигнал логической "1", который, поступая на первый вход элемента "ИЛИ" 4, запрещает проход импульсов на счетчик 7, завершая тем самым процесс измерения дальности. При поступлении следующего стартового импульса с передатчика процесс измерения повторяется по описанной выше схеме.
Коды минимальной Dmin и максимальной Dmax дальностей, поступающие на вторые входы первой 11 и второй 10 схем сравнения, получаются путем преобразования по первому и второму выходам ПЗУ 13 кода Dуст, установленного в регистре установленной дальности 17. Законы преобразования могут быть различными в зависимости от выбранного режима.
Для управления режимами измерения дальности и вывода информации о дальности на выходную шину 14 служит шина управления 16, по которой кроме этого поступают сигналы на цифровой индикатор 15 для отображения на нем установленного режима измерения дальности и выдачи выходной информации. На младшие разряды адресного входа ПЗУ 13 поступает код, установленный оператором в регистре установленной дальности 17, а на старшие разряды - кодовый сигнал режима с шины управления 16.
Основным режимом работы системы является РЕЖИМ 1: измерение дальности в диапазоне, ограниченном регулируемо с двух сторон. В этом режиме код установленной дальности Dуст, присутствующий на входе ПЗУ 13, преобразуется по первому выходу в код минимальной дальности Dmin в соответствии с выражением Dmin= f(Dуст) (например: Dmin= Dуст), по второму выходу - в код максимальной дальности Dmax в соответствии с выражением Dmax= f(Dуст).
В РЕЖИМЕ 2 (измерение дальности в диапазоне, ограниченном снизу) код установленной дальности Dуст, присутствующий на входе ПЗУ 13, преобразуется по первому выходу в код минимальной дальности Dmin в соответствии с выражением Dmin= f(Dуст) (например: Dmin= Dуст), по второму выходу записывается код, равный максимальной емкости счетчика 7.
В РЕЖИМЕ 3 (измерение дальности в диапазоне, ограниченном сверху) код установленной дальности Dуст, присутствующий на входе ПЗУ 13, преобразуется по второму выходу в код максимальной дальности Dmax в соответствии с выражением Dmax= f(Dуст) (например: Dmax= Dуст), по первому выходу записывается код, соответствующий нулевой дальности.
В РЕЖИМЕ ПРИНУДИТЕЛЬНОГО ВВОДА дальности сигнал логической "1" с шины управления поступает на второй вход элемента "ИЛИ" 8 и с выхода его - на вход управления мультиплексора 12, разрешая тем самым проход через мультиплексор 12 на выходную шину 14 и на индикатор дальности 15 кода Dвых.уст с третьего выхода ПЗУ 13, определяющего дальность в соответствии с выражением Dвых.уст= f(Dуст) (например: Dвых.уст= Dуст). Одновременно сигнал логической "1" с выхода элемента "ИЛИ" 8 поступит и на выходную шину 14, и на цифровой индикатор 15 для отображения информации о том, что на выход системы поступает установленная, а не замеренная дальность.
По аналогии с РЕЖИМОМ ПРИНУДИТЕЛЬНОГО ВВОДА осуществляется вывод кода Dвых.уст с третьего выхода ПЗУ 13 на выходную шину 14 и на индикатор дальности 15 в случае неудовлетворения измеренного значения условиям задачи встречи снаряда с целью, определяемым подключенным к управляющей шине 16 вычислителем.
Значения одной из реализованных в устройстве зависимостей ширины диапазона измеряемой дальности от установленного значения представлены в таблице, где в качестве ближней границы интервала выбрано само установленное значение дальности Dmin= Dуст и, для уменьшения субъективных ошибок оператора при определении дальности до цели введена возрастающая с расстоянием ширина диапазона.
Предпочтительной реализацией приемопередающей части описанного устройства для ввода информации о дальности является импульсный лазерный передатчик, приспособленный для направления излучения на цель, и фотоприемное устройство, приспособленное для приема отраженного лазерного излучения и преобразования его в электрические сигналы. В качестве приемопередающей части устройства можно использовать и радиолокатор. Элементы электронной схемы устройства могут быть реализованы с применением стандартных микросхем, например микросхем серий 1533 или 1554 [9] . ПЗУ реализуется с помощью программируемой микросхемы, например 1623РТ1.
Программируемая микросхема позволяет реализовать достаточный набор реализаций зависимости Dmax= f(Dуст) при Dmin= Dуст в РЕЖИМЕ 1 и их оперативный выбор по сигналам с шины управления, что позволяет адаптировать предлагаемое устройство для каждого конкретного типа управляемого вооружения конкретного комплекса. Кроме того, предлагаемое устройство позволяет реализовать множество конкретных законов (кроме предложенных выше примеров) преобразования установленной дальности на входе ПЗУ по всем трем его выходам Dmin, Dmax, Dвых.уст и адаптировать устройство к системе управления любого комплекса и выполняемым им задачам. При этом зависимости Dmin= f(Dуст), Dmax= f(Dуст) и Dвых.уст= f(Dуст) выбираются из "зашитого" в ПЗУ набора по сигналам с шины управления.
Для расширения эргономических свойств устройства может, например, использоваться следующий закон преобразования установленной дальности:
Dуст= (Dmin+Dmax)/2,
при заданной ширине интервала (Dmax-Dmin), который позволяет задавать установленным значением Dуст середину диапазона измеряемой дальности.
Источники информации:
1. Патент США 3752581, МКИ G 01 C 3/08.
2. Патент Великобритании 1322407, МКИ G 01 S 9/62.
3. Патент США 3545861, МКИ G O1 C 3/08.
4. Унифицированный лазерный бинокль-дальномер модульной конструкции, индекс 1Д18. Паспорт АЭП 36.48.077 ПС, 1991г.
5. International Defense Review, 1975, 8, # 5.
6. International Defense Review, 1978, 11, # 1.
7. Defense Material, 1979, 4, # 1.
8. С. А. Сухопаров "Сборка и юстировка морских оптических дальномеров", Оборонгиз, Москва, 1961 г. , стр. 4-6.
9. И. И. Петровский, А. В. Прибыльский и др. "Логические ИС КР1533, КР1554. Справочник", Бином, Москва, 1993г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДЛЯ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 1998 |
|
RU2154808C2 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ ПРИ ИЗМЕРЕНИИ ДАЛЬНОСТИ И СЕЛЕКТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2165072C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2213927C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2176777C2 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 1999 |
|
RU2165589C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
Изобретение используется в противотанковых, зенитных и космических ракетных комплексах. Предварительно измеряют дальность до цели дальномером в ограниченном диапазоне дальностей. Устанавливают одно регулируемое значение дальности, преобразовывают его в граничные значения диапазона измеряемых дальностей. После измерения дальности до цели дальномером вводят в вычислитель либо измеренное значение, если оно удовлетворяет условиям задачи встречи снаряда с целью, либо установленное, если измеренное значение условиям задачи не удовлетворяет. Границы диапазона измеряемых дальностей выбирают в зависимости от установленного значения дальности по законам, определяемым, исходя из типа цели и типа снаряда. Устройство содержит регистр установленной дальности, схемы сравнения, регистр выходных данных, ПЗУ, мультиплексор, триггер, передатчик и приемник электромагнитной энергии, цифровой индикатор, счетчик импульсов и шину управления. Изобретение позволяет унифицировать систему измерения дальности для использования ее выходных в различных комплексах вооружения, имеющих в своем составе артиллерийское и управляемое вооружение нескольких типов, повысить помехозащищенность и автоматизировать процесс. 3 с. и 3 з. п. ф-лы, 1 ил. , 1 табл.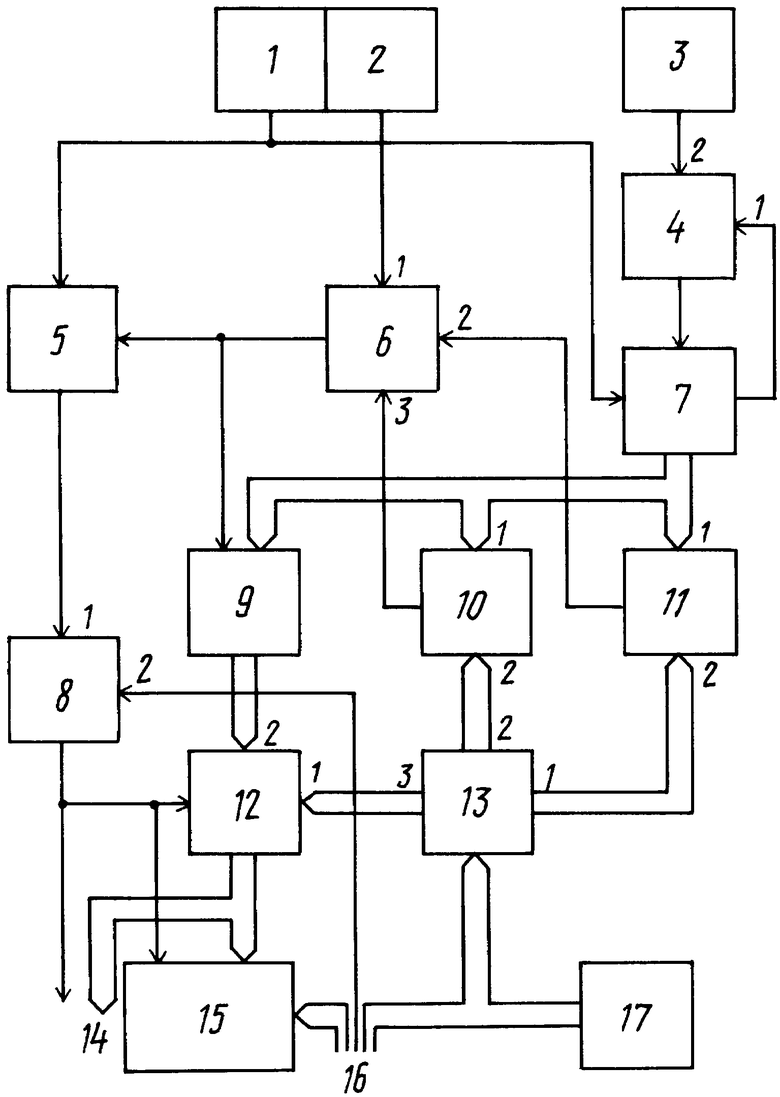
| US 3545861 А, 08.12.1970 | |||
| Утроитель частоты | 1985 |
|
SU1322407A1 |
| US 3752561 А, 14.08.1973 | |||
| SU 1811263 A1, 27.06.1996. | |||

