Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
Известен оптический прицел системы наведения управляемого снаряда [1], содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также шторку, установленную на оправу вращающейся призмы, выполненную в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей двух оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы "исключающее ИЛИ", а также соответственно к первому и второму входу ПЗУ, выход схемы "исключающее ИЛИ" подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен ко входу преобразователя код-время, выход которого подключен ко второму входу коммутатора каналов, при этом вторые входы счетчика времени и преобразователя код- время подключены к выходу опорного генератора, а первый и второй выходы коммутатора каналов подключены соответственно к входам первого и второго лазеров.
Существенным недостатком данного оптического прицела является недостаточная точность наведения управляемого снаряда при стрельбе по подвижным целям и с подвижных носителей. Кроме того, из-за задымленности канала управления дымом от маршевого двигателя снаряда также повышается вероятность потери снаряда из-за перекрытия канала управления.
Задачей предлагаемого изобретения является повышение точности наведения управляемого снаряда за счет изменения траектории полета снаряда в зависимости от условий стрельбы.
Поставленная цель достигается тем, что в оптический прицел системы наведения управляемого снаряда, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы "исключающее ИЛИ", а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы "исключающее ИЛИ" подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени, а выход преобразователя код-время подключен ко второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров, введены вычислитель поправок, система датчиков, мультиплексор, первый и второй регистры, выходы которых подключены к первому и второму входам мультиплексора соответственно, третий вход которого соединен с выходом элемента "исключающее ИЛИ", а выход соединен с четвертым входом постоянного запоминающего устройства, а входы первого и второго регистров подключены к первому и второму выходам вычислителя поправок, входы которого подключены к системе датчиков.
На фиг.1 приведена структурная схема оптического прицела системы наведения.
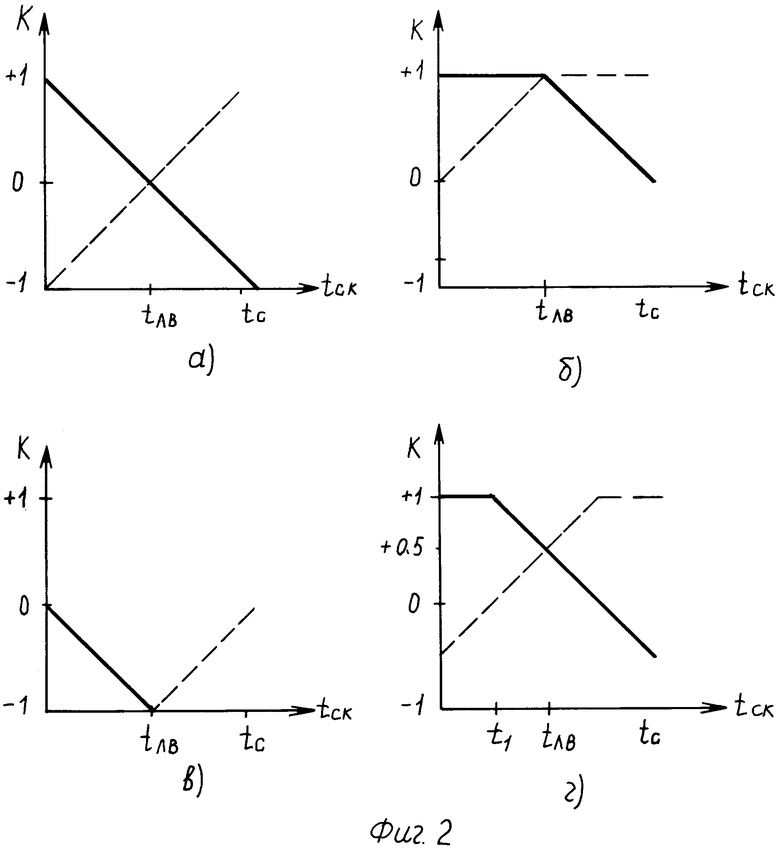
На фиг.2 приведены зависимости величин формируемых команд в зависимости от времени и направления сканирования (длительности пар импульсов на выходе преобразователя код-время).
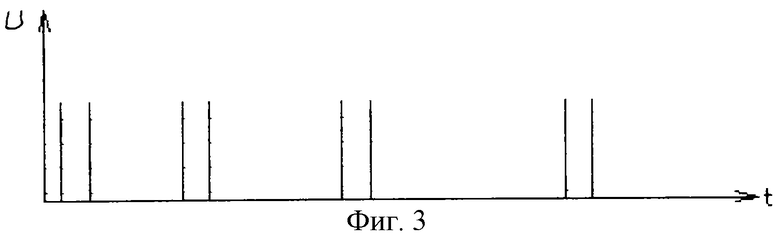
На фиг.3 приведены импульсы на выходе преобразователя код-время (импульсы включения лазеров).
Оптический прицел системы наведения содержит визир 1, прожектор 2, включающий в себя два инжекционных лазера 3 и 4, систему вывода излучения лазеров на единую оптическую ось 5, оптический сканер 6, призму 7, панкратический объектив 8, непрозрачную шторку 9, два оптронных датчика 10 и 11, первую и вторую схемы задержек 12 и 13, схему "исключающее ИЛИ" 14, постоянное запоминающее устройство (ПЗУ) 15, счетчик времени 16, коммутатор каналов 17, преобразователь код-время 18, опорный генератор 19, мультиплексор 20, первый 21 и второй 22 регистры, вычислитель поправок 23 и система датчиков 24, состоящая, например, из датчика воздушной скорости 25 и датчика угловой скорости вращения линии визирования 26 и т.п. Цифровые схемы (ПЗУ, счетчики, коммутаторы и логические элементы) могут быть выполнены, например, на основе однокристальной микроЭВМ типа АТ89С52 или на жесткой логике, например, на базе ПЛИС.
Работает прицел следующим образом.
С датчиков 25 и 26 на вычислитель поправок 23 поступают сигналы о воздушной скорости, в том числе с учетом движения носителя, и скорости вращения линии визирования цели (с учетом скорости носителя и цели). Вычислитель поправок 23 на основании поступившей информации определяет величины смещения информационного поля управления относительно линии визирования по каналам тангажа и курса, позволяющие минимизировать динамические ошибки наведения в данных условиях стрельбы. С первого и второго выходов вычислителя поправок в первый 21 и второй 22 регистры записываются коды соответствующие необходимому смещению центра информационного канала относительно линии визирования: в первый регистр 21 - для первого канала наведения - тангажа, а во второй - для курса. Сигналы с выходов первого 21 и второго 22 регистров поступают соответственно на первый и второй входы мультиплексора 20, сигнал с выхода которого поступает на четвертый вход постоянного запоминающего устройства 15, и определяют номер страницы ПЗУ. При этом вращающаяся призма 7 совершает нутационное сканирование плоскими лучами лазеров 3 и 4 по формируемому полю, радиус которого на дальности управляемого объекта поддерживается постоянным за счет изменения фокусного расстояния панкратического объектива 8. При этом в ходе вращения призмы шторка 9 производит последовательное прерывание в оптронных датчиках 10 и 11, комбинация сигналов на выходах которых определяет направление сканирования каждого плоского луча по формируемому полю. Данные сигналы поступают после прохождения схем задержек 12 и 13 соответственно на первые и вторые входы ПЗУ 15 (эти входы определяют направление сканирования и канала сканирования) и схемы "исключающее ИЛИ" 14, на выходе которой формируется сигнал, определяющий работу канала курс (включен первый лазер 4 - сигнал лог.1) или канала тангаж (включен второй лазер 3- сигнал лог.0). От момента каждой смены состояния сигнала на выходе схемы "исключающее ИЛИ" 14 счетчик времени 16 синхронно с частотой опорного генератора 19 формирует на своем выходе код, пропорциональный текущему времени, относительно смены сигнала на выходе схемы "исключающее ИЛИ" 14. В зависимости от состояния адресных входов ПЗУ 15 (текущее время сканирования - третий вход, канал и направление сканирования - первый и второй входы, смещение центра управления относительно линии визирования - четвертый вход) формирует на своем выходе код, в соответствии с которым преобразователь код-время 18 формирует парные импульсы, причем, временной интервал между импульсами в паре соответствует текущему каналу сканирования, а частота повторения посылок линейно меняется во времени. При этом зависимости периода повторения посылок (определяет величину и направление команды управления) от времени сканирования приведены на фиг.2. Где фиг.2а - при совпадении центра наведения с линией визирования, фиг.2б - при смещении центра наведения относительно линии визирования на +К, фиг.2в - на - К, фиг.2г - на +0,5К, где К - максимальная величина команды управления.
При смене информации на выходе одного из оптронных датчиков 10 или 11 сигналы с их выходов, пройдя через линии задержек 12 и 13, поступают на первый и второй входы ПЗУ 15 и определяют направление сканирования полоски, например, на выходе оптронных датчиков формируются сигналы 00 соответственно, что соответствует каналу тангажа и направлению сканирования полоски снизу вверх, кроме того, сигналы с выхода линий задержек 12 и 13 поступают на входы "исключающее ИЛИ" 14 и на выходе ее формируется сигнал лог.1, т.к. на ее входах сигналы 00 (смена канала управления). Фронт этого сигнала, поступая на первый вход счетчика времени 16, обнуляет его, что соответствует нулевому времени на фиг.3. Сигнал лог.1 с выхода "исключающее ИЛИ" поступает на третий вход мультиплексора 20 и разрешает прохождение сигнала с выхода первого регистра (тангаж) на его выход и далее на четвертый вход ПЗУ, например, в первом регистре при этом присутствует код, соответствующий смещению поля наведения относительно линии визирования на величину +К (фиг.2б, сплошная линия), при этом ПЗУ 15 на своем выходе формирует код, величина которого пропорциональна максимальной команде, поступающей на управляемый снаряд, который поступает на первый вход преобразователя код-время 18, где этот код преобразуется в парные импульсы, причем расстояние между импульсами в паре определяется каналом управления (включен первый или второй лазер), в нашем случае при комбинации на первом и втором входах ПЗУ 00 - первый канал тангажа, а период повторения пар - соответствует величине команды, передаваемой на управляемый снаряд - фиг.3. Эти импульсы поступают на второй вход коммутатора канала 17 и под действием сигнала лог.1 с выхода "исключающее ИЛИ" 14 эти импульсы поступают на первый лазер 3, где они преобразуются в световой сигнал, который, пройдя через систему вывода излучения лазеров на единую оптическую ось 5, призму 7 и панкратический объектив 8, поступает на выход прицела и далее поступает на управляемый снаряд. С изменением времени сканирования до tл.в. (положение сканирующей полоски в пространстве совпадает с линией визирования) ПЗУ 15 продолжает выдавать величину максимальной команды - фиг.2б сплошная линия и на вход первого лазера 3 продолжают поступать парные импульсы, соответствующие максимальной команде управления, которые передаются на управляемый снаряд. С изменением времени сканирования от tл.в. до tc (завершение сканирования по текущей координате) ПЗУ 15 на своем выходе формирует коды линейно изменяющиеся во времени, как показано на фиг.2б, и период повторения парных импульсов, поступающих на первый лазер 3, также линейно изменяется. Т.о., при прохождении (сканировании) полоски через точку, соответствующую линии визирования, время tл.в. на фиг.3а, величина команды, передаваемой на управляемый снаряд составляет 1.0 величины максимальной команды, т.е. на снаряд действует повышенная команда вверх.
В момент времени tc происходит смена информации на выходе первого оптронного датчика 10 и сигнал лог.1 с его выхода пройдя через линию задержки 12, поступает на первый вход ПЗУ 15. Т.о., на первом и втором входах ПЗУ 15 присутствуют сигналы 10 соответственно, что соответствует каналу курса и направлению сканирования слева направо, кроме того, сигналы с выхода линий задержек 12 и 13 поступают на входы "исключающее ИЛИ" 14 и на выходе ее формируется сигнал лог.0, т.к. на ее входах сигналы 10 (смена канала управления). Спад этого сигнала, поступая на первый вход счетчика времени 16, обнуляет его, что соответствует нулевому времени на фиг.2. Сигнал лог.0 с выхода "исключающее ИЛИ" поступает на третий вход мультиплексора 20 и разрешает прохождение сигнала с выхода второго регистра 22 (курса) на его выход и далее на четвертый вход ПЗУ, например, во втором регистре при этом присутствует код, соответствующий смещению поля наведения относительно линии визирования на величину - 0,5К (фиг.2г), и ПЗУ 15 на своем выходе формирует код, величина которого пропорциональна +0,5К (т.е. 0,5 величины максимальной команды, поступающей на управляемый снаряд), который поступает на первый вход преобразователя код-время 18, где этот код преобразуется в парные импульсы, причем расстояние между импульсами в паре определяется каналом управления (включен второй лазер), в нашем случае при комбинации на первом и втором входах ПЗУ 10 - второй канал курса, а период повторения пар соответствует величине команды передаваемой на управляемый снаряд - фиг.3. Эти импульсы поступают на второй вход коммутатора канала 17 и под действием сигнала лог.0 с выхода "исключающее ИЛИ" 14 эти импульсы поступают на второй лазер 4, где они преобразуются в световой сигнал, который, пройдя через систему вывода излучения лазеров на единую оптическую ось 5, призму 7 и панкратический объектив 8, поступает на выход прицела и далее поступает на управляемый снаряд. С изменением времени сканирования до t1 ПЗУ 15 на своем выходе формирует коды, линейно изменяющиеся во времени, как показано на фиг.2г, и период повторения парных импульсов, поступающих на второй лазер 3, также линейно изменяется. С изменением времени сканирования от t1 до tc ПЗУ 15 на своем выходе формирует коды, равные минимальной величине команды, как показано на фиг.2г, и период повторения парных импульсов, поступающих на второй лазер 3, также остается минимальным.
Т.о., при прохождении (сканировании) полоски через точку, соответствующую линии визирования, время tл.в. на фиг.2г, величина команды, передаваемой на управляемый снаряд, составляет -0,5К, т.е. на снаряд действует повышенная команда влево.
В момент времени tc происходит смена информации на выходе второго датчика 11 и сигнал лог.1, пройдя через вторую линию задержки 13, поступает на второй входы ПЗУ 15, т.е. на выходе датчиков формируются сигналы 11 соответственно, что соответствует каналу тангажа и направлению сканирования полоски сверху вниз, кроме того, сигналы с выхода линий задержек 12 и 13 поступают на входы "исключающее ИЛИ" 14 и на выходе ее формируется сигнал лог.1, т.к. на ее входах сигналы 11. (смена канала управления). Фронт этого сигнала, поступая на первый вход счетчика времени 16, обнуляет его, что соответствует нулевому времени на фиг.2. Сигнал лог.1 с выхода "исключающее ИЛИ" поступает на третий вход мультиплексора 20 и разрешает прохождение сигнала с выхода первого регистра (тангаж) на его выход и далее на четвертый вход ПЗУ, при этом в первом регистре присутствует код, соответствующий смещению поля наведения относительно линии визирования на нулевую величину (фиг.2б, пунктирная линия), при этом ПЗУ 15 на своем выходе формирует код, величина которого пропорциональна нулевой команде управления, поступающей на управляемый снаряд, который поступает на первый вход преобразователя код-время 18, где этот код преобразуется в парные импульсы, причем расстояние между импульсами в паре определяется каналом управления (включен первый или второй лазер), в нашем случае при комбинации на первом и втором входах ПЗУ 11 - первый канал тангажа, а период повторения пар - соответствует величине команды, передаваемой на управляемый снаряд - фиг.3. Эти импульсы поступают на второй вход коммутатора канала 17 и под действием сигнала лог.1 с выхода "исключающее ИЛИ" 14 эти импульсы поступают на первый лазер 3, где они преобразуются в световой сигнал, который пройдя через систему вывода излучения лазеров на единую оптическую ось 5, призму 7 и панкратический объектив 8, поступает на выход прицела и далее поступает на управляемый снаряд. С изменением времени сканирования до tл.в. ПЗУ 15 на своем выходе формирует коды, линейно изменяющиеся во времени, как показано на фиг.2а, и период повторения парных импульсов, поступающих на первый лазер 3, также линейно изменяется. С изменением времени сканирования от tл.в. до tc ПЗУ 15 продолжает выдавать величину максимальной команды (фиг.2б сплошная линия) и на вход первого лазера 3 продолжают поступать парные импульсы, соответствующие максимальной команде управления, которые передаются на управляемый снаряд. Т.о., при прохождении (сканировании) полоски через точку, соответствующую линии визирования, время tл.в. на фиг.2б, величина команды, передаваемой на управляемый снаряд, составляет 1,0 величины максимальной команды, т.е. на снаряд действует повышенная команда вверх.
И т.д.
При этом информация в первом 21 и втором 22 регистрах может обновляться в зависимости от метеоусловий, скорости и направления движения цели, скорости и направления движения носителя, например, с помощью баллистического вычислителя носителя.
Т.о., оптический прицел системы наведения управляемого снаряда формирует команды управления снарядом, компенсирующие динамические ошибки снаряда, определяемые текущими условиями стрельбы по информации с вычислителя поправок (системы датчиков). Т.е. таким образом происходит корректировка траектории движения снаряда в зависимости от внешних условий стрельбы, что существенно повышает точность наведения снаряда на цель.
Источники информации:
1. Патент РФ №2150073 МПК7 F 41 G 7/26
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Оптический прицел содержит установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°. Выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы "исключающее ИЛИ", а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы "исключающее ИЛИ" подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени, а выход преобразователя код-время подключен ко второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров. Прицел снабжен вычислителем поправок, системой датчиков, мультиплексором, первым и вторым регистрами, выходы которых подключены к первому и второму входам мультиплексора соответственно, третий вход которого соединен с выходом элемента "исключающее ИЛИ", а выход соединен с четвертым входом постоянного запоминающего устройства, а входы первого и второго регистров подключены к первому и второму выходам вычислителя поправок, входы которого подключены к системе датчиков. Реализация изобретения позволяет повысить точность наведения управляемого объекта за счет изменения траектории полета снаряда в зависимости от условий стрельбы. 3 ил.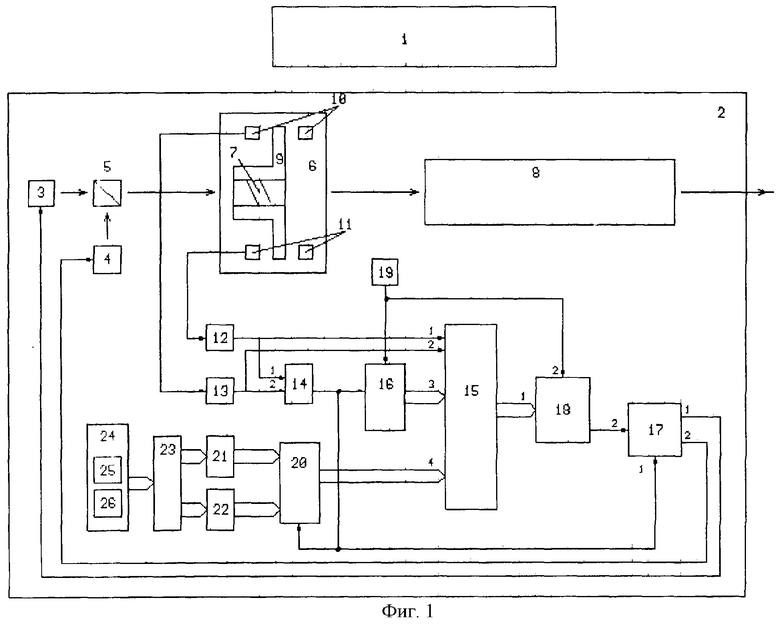
Оптический прицел системы наведения управляемого снаряда, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы «исключающее ИЛИ», а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы «исключающее ИЛИ» подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени, а выход преобразователя код-время подключен ко второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров, отличающийся тем, что в него введены вычислитель поправок, система датчиков, мультиплексор, первый и второй регистры, выходы которых подключены к первому и второму входам мультиплексора соответственно, третий вход которого соединен с выходом элемента «исключающее ИЛИ», а выход соединен с четвертым входом постоянного запоминающего устройства, а входы первого и второго регистров подключены к первому и второму выходам вычислителя поправок, входы которого подключены к системе датчиков.
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |

