Изобретение относится к способам измерения дальности с применением селекции цепей по дальности, реализуемым с помощью цифровых систем измерения дальности. Система может быть использована для измерения дальности как в составе лазерного дальномера или дальномера-подсветчика, так и в составе радарной установки.
Селекция целей при измерении дальности является одной из основных задач дальнометрии. Для селекции целей могут использоваться различные схемы, например селекция целей по порядку прихода сигнала отклика от целей [1, 2] или селекция целей по нахождению их в заданном интервале дальностей [3].
Чаше всего в современных армейских дальномерах, например, таких как 1D18 [4] , LP7 [5] , LRR-103 [6], LF11, LF14 [7], используется способ измерения дальности с использованием строба-регулятора минимальной дальности, при котором отсекаются цели, расположенные ближе заданной дальности. Для установки строба-регулятора необходим орган управления, в качестве которого может использоваться потенциометр или две кнопки. Такой способ селекции целей полезен для отсечения объектов, расположенных на заведомо меньшем расстоянии, чем обрабатываемая цель.
Способ селекции целей стробом-регулятором минимальной дальности бывает, однако, недостаточно эффективен при необходимости выбора одной из близкорасположенных друг к другу по дальности целей, попадающих в створ зондирующего лазерного луча. Примером такого случая может служить колонна военной техники, двигающаяся перпендикулярно фронту. В таких случаях необходимы индикация наличия более одной цели в створе зондирующего лазерного луча и использование дополнительных способов селекции целей.
При наличии индикации о нахождении более одной цели в створе зондирующего лазерного луча могут быть использованы режимы ПЕРВАЯ ЦЕЛЬ или ПОСЛЕДНЯЯ ЦЕЛЬ. В режиме ПЕРВАЯ ЦЕЛЬ на индикатор и выход дальномера выводится информация о дальности до ближней цели, находящейся за пределами строба-регулятора. В режиме ПОСЛЕДНЯЯ ЦЕЛЬ на индикатор и выход дальномера выводится информация о дальности до самой удаленной цели, находящейся за пределами строба-регулятора. В таком случае дополнительно используется переключатель режимов измерения.
Кроме двух описанных режимов в дополнение к стробу-регулятору минимальной дальности может быть использован селектор номера цели (по порядку прихода отклика от нее): "ПЕРВАЯ, ВТОРАЯ, ТРЕТЬЯ" цель либо "ПЕРВАЯ, ВТОРАЯ, ПОСЛЕДНЯЯ" цель. В таком случае используется переключатель номера цели, и на индикатор и выход дальномера выводится информация о дальности до цели, находящейся за пределами строба-регулятора и соответствующей установленному положению переключателя.
Недостатком всех вышеописанных способов является невозможность отсечки дальних целей, какая бывает необходима при выдаче дальномером информации о дальности в систему лазерного наведения снарядов, использующих отклоняющий от линии прицеливания маневр в начальной фазе полета.
Наиболее близкий по технической сущности к предлагаемому способ селекции целей можно осуществить с помощью селективной системы, описанной в патенте [3] . Эта система позволяет проводить измерение дальности в диапазоне, ограниченном стробами-регуляторами минимальной и максимальной дальностей. Предельно сужая диапазон измерений, с помощью такой системы можно выделить одну из близкорасположенных целей, однако при этом нельзя достоверно определить, какой именно из этих цепей соответствует поступающая информация о дальности. Данная система требует наличия органов управления как минимальной, так и максимальной дальностью, что является ее недостатком.
В работе оператора сложного комплекса вооружения в экстремальных боевых условиях возникают проблемы перенасыщенности комплекса органами управления и экономии времени на проведение оператором вспомогательных операций. Проблема должна решаться путем максимально возможной автоматизации операций при максимально возможном сокращении органов управления. Это касается и используемых в комплексе дальномеров.
Задачей изобретения является автоматизация процесса селекции целей при измерении дальности с максимально возможным сокращением количества органов управления.
Для решения поставленной задачи предлагается способ селекции, включающий установку значения строба-регулятора минимальной дальности и строба-регулятора максимальной дальности, предусматривающий индикацию наличия более одной цели за пределами стробирования, т.е. в установленном таким образом диапазоне измерений. Предлагаемый способ отличается тем, что предварительно задают критичное значение интервала времени следования команд на измерение дальности, определяют ширину диапазона измерений в зависимости от установленного значения строба-регулятора минимальной дальности и устанавливают в соответствии с ней значение строба-регулятора максимальной дальности, затем по команде на измерение дальности измеряют дальность до первой из целей, находящихся в диапазоне измерений, а после замера дальности до первой цели при поступлении повторной команды на измерение дальности с интервалом времени, не превышающим критичного, передвигают строб-регулятор минимальной дальности до значения, превышающего измеренное, и производят измерение дальности до следующей цели.
Такой способ позволяет отсечь первую из целей, находящихся в заданном диапазоне, без использования дополнительных органов управления. Последовательная подача нескольких команд на измерение дальности с интервалами времени, не превышающими заданного критичного значения, позволяет отсекать по очереди каждую из последующих по дальности цепей, находящихся в измеряемом диапазоне. Процесс может продолжаться, пока не пропадет индикация наличия более одной цели в заданном диапазоне измерений.
Для предотвращения возможности отсечения в описанном процессе измерения сразу нескольких целей передвижение строба-регулятора минимальной дальности после каждого замера осуществляют до значения, превышающего измеренное на одно дискретное значение установки строба.
Строб-регулятор максимальной дальности в описанном процессе может либо оставаться постоянным, либо передвигаться синхронно со стробом-регулятором минимальной дальности в зависимости от выполняемых дальномером задач.
При выдаче дальномером информации о дальности в систему лазерного наведения снарядов, использующих отклоняющий от линии прицеливания маневр в начальной фазе полета, ширину диапазона измерений предпочтительно выбирают пропорциональной установленному значению строба-регулятора минимальной дальности.
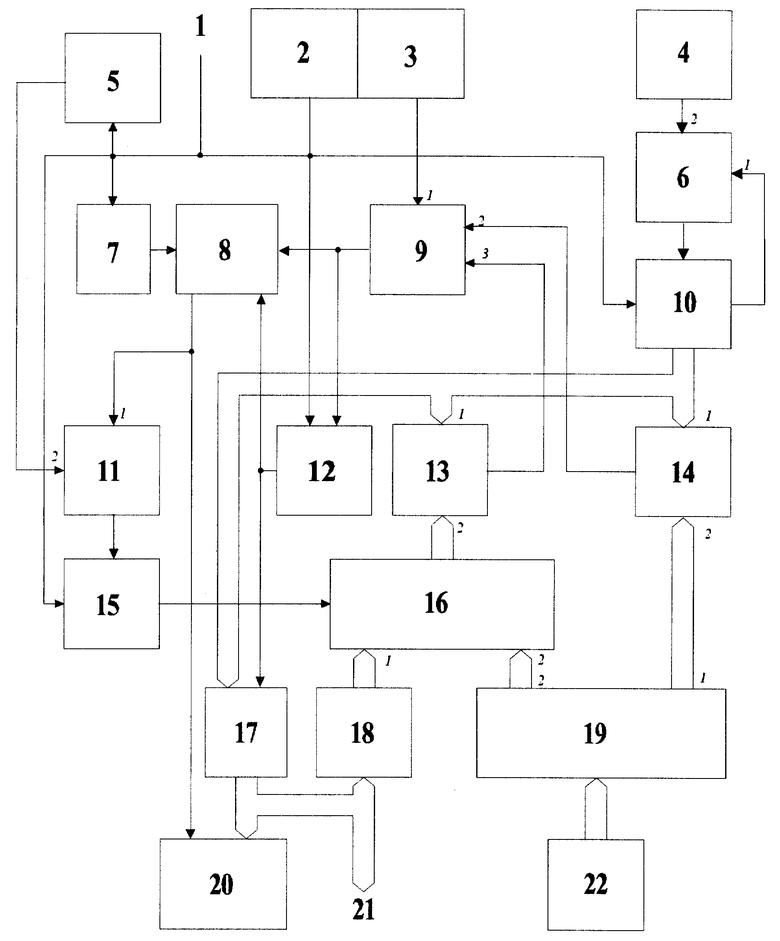
Предлагаемый способ реализуется с помощью селективной системы определения дальности, структурная схема которой представлена на чертеже. Задача изобретения решается за счет того, что в состав системы, имеющей передатчик 2 и приемник 3 электромагнитной энергии, счетчик импульсов 10, выход переполнения которого соединен с первым входом элемента ИЛИ 6, второй вход которого соединен с выходом генератора тактовых импульсов 4, а выход - со счетным входом счетчика, вход установки в ноль которого соединен с передатчиком, элемент И 9, первый вход которого соединен с выходом приемника, цифровой индикатор 20 для отображения информации о дальности и выходную шину данных 21 для выдачи информации на внешние устройства, введены регистр установленной дальности 22, программируемое запоминающее устройство (ПЗУ) 19, первая 14 и вторая 13 схемы сравнения, регистр выходных данных 17, сумматор 18, мультиплексор 16, первый 12, второй 8 и третий 15 триггеры, схема задержки 7, ждущий мультивибратор 5 и второй элемент И 11, причем информационный выход счетчика импульсов соединен с первыми входами обеих схем сравнения и информационным входом регистра выходных данных, выход которого соединен с входом сумматора, входом индикатора и выходной шиной, второй вход первой схемы сравнения соединен с первым выходом ПЗУ, а выход - со вторым входом первого элемента И, третий вход которого соединен с выходом второй схемы сравнения, второй вход которой соединен с выходом мультиплексора, первый вход которого соединен с выходом сумматора, а второй вход - с вторым выходом ПЗУ, вход которого подключен к регистру установленной дальности. Передатчик подключен к шине запуска 1, соединенной с входами ждущего мультивибратора, схемы задержки и входом сброса первого триггера, тактовый вход которого соединен с выходом первого элемента И, а выход соединен с входом регистра выходных данных и с входом данных второго триггера, тактовый вход которого соединен с выходом первого элемента И, вход сброса - с выходом схемы задержки, а выход - с индикатором и первым входом второго элемента И, второй вход которого соединен с выходом ждущего мультивибратора, а выход - с входом данных третьего триггера, тактовый вход которого подключен к шине запуска, а выход соединен с входом управления мультиплексора.
Система работает следующим образом. В исходном состоянии на выходе переполнения счетчика присутствует сигнал, который, поступая на первый вход элемента ИЛИ 6, запрещает проход импульсов с генератора тактовых импульсов 4 на счетный вход счетчика 10. На выходах первого 12 и второго 8 триггеров и на выходе ждущего мультивибратора 5 присутствуют сигналы логического "0".
По команде на измерение дальности (сигнал ЗАПУСК) включается передатчик 2, происходит обнуление счетчика импульсов 10 и по сигналу с выхода переноса счетчика 10 разрешается прохождение тактовых импульсов генератора 4 через элемент ИЛИ 6 на тактовый вход счетчика 10.
По переднему фронту сигнала ЗАПУСК в триггер 15 записывается сигнал логического "0", т. к. на его вход поступает логический "0" с выхода элемента И 11, на первый и второй входы которого, в свою очередь, поступают сигналы логических нулей с выходов триггера 8 и ждущего мультивибратора 5 соответственно. По сигналу логического "0", поступающему с выхода триггера 15 на вход управления мультиплексора 16, на выход мультиплексора и далее на вход схемы сравнения 13 поступает сигнал второго выхода ПЗУ 19.
По заднему фронту сигнала ЗАПУСК запускается ждущий мультивибратор 5, вырабатывая на выходе сигнал логической "1".
Тактовые импульсы генератора 4, поступая на вход счетчика 10, начинают его заполнение. Код с выхода счетчика (его содержимое) поступает на первые входы первой 14 и второй 13 схем сравнения и на вход регистра 17. Пока содержимое счетчика 10 меньше содержимого второго выхода ПЗУ, поступающего на второй вход второй схемы сравнения 13, на выходе этой схемы сравнения будет присутствовать сигнал логического "0", запрещающий прохождение сигналов с приемника 3 через элемент И 9 на тактовые входах триггеров 8 и 12. На втором выходе ПЗУ присутствует код, соответствующий определенным образом коду, заданному регистром установленной дальности 22 (в простейшем случае - равный установленному). Таким образом, с помощью регистра 22 по второму выходу ПЗУ задается значение строба-регулятора минимальной дальности.
Одновременно на второй вход элемента И 9 поступает сигнал логической "1" с выхода первой схемы сравнения 14. Сигнал логической "1" на выходе первой схемы сравнения 14 остается неизменным, пока содержимое счетчика 10 меньше содержимого первого выхода ПЗУ, поступающего на второй вход этой схемы сравнения 14. На первом выходе ПЗУ присутствует код, преобразованный из кода, заданного регистром установленной дальности 22, в соответствии с необходимой шириной диапазона измерений. Таким образом, с помощью регистра 22 по первому выходу ПЗУ задается значение строба-регулятора максимальной дальности.
В момент времени, когда содержимое счетчика 10 достигнет минимального значения дальности, заданной регистром 22 и ПЗУ (по второму выходу), на выходе второй схемы сравнения 13 появляется сигнал логической "1", поступающий на третий вход элемента И 9 и разрешающий (при присутствии логической "1" на втором входе элемента И 9) прохождение сигналов с приемника 3. Сигнал с приемника 3 (сигнал отклика от цели) проходит через элемент И 9 на тактовый вход первого триггера 12 и устанавливает на его выходе сигнал логической "1". По этому сигналу регистр данных 17 переписывает содержимое счетчика 10 и выдает эту информацию на выходную шину 21, индикатор 20 и сумматор 18. Сигнал логической "1" с выхода первого триггера 12 поступает также на D-вход второго триггера 8.
Теперь, если в диапазоне измерений находится еще одна цель, то сигнал отклика от нес с выхода приемника 3, поступая через элемент И 9 на тактовый вход второго триггера 8, установит на его выходе логическую "1" (поступающую на D-вход этого триггера). Кроме того, сигнал логической "1" с выхода второго триггера 8 поступает на индикатор 20 для индикации наличия нескольких целей в диапазоне измерения.
Когда содержимое счетчика 10 достигнет максимального значения, заданного регистром 22 и ПЗУ (по первому выходу), на выходе первой схемы сравнения 14 появится сигнал логического "0", запрещающий прохождение сигналов с выхода приемника 3.
По заполнении счетчика 10 на его выходе переноса появляется сигнал логической "1", свидетельствующий об окончании цикла измерений и запрещающий проход импульсов с выхода генератора через схему ИЛИ 6. Таким образом, цикл измерения завершается.
По завершении цикла измерений мы имеем на индикаторе значение дальности до цели, находящейся в диапазоне измерений, и сигнал наличия или отсутствия в диапазоне измерений других целей.
Кроме того, на первом входе элемента И 11 мы имеем либо сигнал логической "1" при наличии более одной цели в диапазоне измерений, либо сигнал логического "0", если в диапазоне находится одна цель или вовсе нет целей.
При необходимости измерения дальности до второй из нескольких целей, находящихся в диапазоне измерений, повторно подается сигнал замера дальности (ЗАПУСК) в течение времени, не превышающего периода, определяемого длительностью выходного сигнала мультивибратора 5.
Теперь по переднему фронту сигнала ЗАПУСК в третий триггер 15 записывается сигнал логической "1", поскольку на его D-входе присутствует сигнал логической "1" с выхода элемента И 11, на входы которого поступают соответствующие сигналы ждущего мультивибратора 5 и второго триггера 8. По сигналу логической "1" с выхода третьего триггера 15, поступающему на вход управления мультиплексора 16, мультиплексор выдает по выходу сигнал с первого входа, представляющий собой сигнал измеренной дальности, прошедший через сумматор 18. При прохождении через сумматор 18 значение измеренной дальности увеличилось на постоянную величину, необходимую для устойчивой работы схемы. Ждущий мультивибратор 5 по заднему фронту сигнала ЗАПУСК перезапустится.
Далее повторяется цикл измерения, описанный выше. При этом, в случае нахождения опять нескольких целей в диапазоне измерений для измерения дальности до очередной из них необходимо повторно подавать сигнал ЗАПУСК с задержкой, не превышающей постоянной времени ждущего мультивибратора. Циклы измерения дальности до все более удаленных целей можно повторять, пока в диапазоне не останется одна последняя цель. В этом случае сигнал наличия более одной цели в диапазоне измерений пропадет (выходы второго 8, следовательно, и третьего 15 триггеров "обнулятся") и на выход мультиплексора 16 вновь поступит сигнал с второго выхода ПЗУ 19 и, следовательно, следующее измерение будет проведено в первоначально установленном диапазоне.
При необходимости возвращения к измерению дальности в первоначально установленном диапазоне при индикации наличия более одной цели в диапазоне измерений (присутствие логической "1" на выходе триггера 8) необходимо подать сигнал ЗАПУСК с задержкой относительно предыдущего на время, превышающее заданный ждущим мультивибратором период. Тогда на выходе мультивибратора 5 появится сигнал логического "0", который запишется в третий триггер 15 и поступит на вход управления мультиплексора 16, на выход которого вновь поступит сигнал с второго выхода ПЗУ 19.
Предпочтительной реализацией приемопередающей части описанной системы определения дальности является импульсный лазерный передатчик, приспособленный для направления излучения на цель, и фотоприемное устройство, приспособленное для приема отраженного лазерного излучения и преобразования его в электрические сигналы. В качестве приемопередающей части системы можно использовать и приемопередающее устройство радара. Элементы электронной схемы системы могут быть реализованы с применением стандартных микросхем, например микросхем серий 1533 или 1554. ПЗУ реализуется с помощью программируемой микросхемы, например, 1623РТ1.
Источники информации
1. Патент США N 3752581, МКИ G 01 C 3/08.
2. Патент Великобритании N 1322407, МКИ G 01 S 9/62.
3. Патент США N 3545861, МКИ G 01 C 3/08.
4. Унифицированный лазерный бинокль-дальномер модульной конструкции, индекс 1Д18. Паспорт АЭП 36.48.077 ПС, 1991 г.
5. International Defense Review, 1975, 8, # 5.
6. International Defense Review, 1978, 11, # 1.
7. Defense Material, 1979, 4, # 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДЛЯ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 1998 |
|
RU2154808C2 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ О ДАЛЬНОСТИ ДО ЦЕЛИ В БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ СНАРЯДАМИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2178141C2 |
| СПОСОБ СЕЛЕКЦИИ ИМПУЛЬСОВ | 2003 |
|
RU2264030C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2176777C2 |
| ГЕНЕРАТОР ПРЯМОУГОЛЬНЫХ ИМПУЛЬСОВ | 2002 |
|
RU2212097C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2000 |
|
RU2169988C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 1999 |
|
RU2165589C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| ГЕНЕРАТОР ПРЯМОУГОЛЬНЫХ ИМПУЛЬСОВ | 1999 |
|
RU2150783C1 |
Изобретение относится к области дальнометрии с применением селекции целей по дальности. Система может быть использована для измерения дальности как в составе лазерного дальномера или дальномера-подсветчика, так и в составе радарной установки. Способ селекции целей при измерении дальности включает установку значения строба-регулятора минимальной дальности и строба-регулятора максимальной дальности, индикацию наличия более одной цели в диапазоне измерений (за пределами стробирования). Строб-регулятор минимальной дальности передвигают до значения, превышающего измеренное на одно дискретное значение установки строба. При передвижении строба-регулятора минимальной дальности строб-регулятор максимальной дальности либо передвигается синхронно с ним, либо остается неизменным. Система определения дальности включает передатчик и приемник электромагнитной энергии, счетчик импульсов, выход переполнения которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом генератора тактовых импульсов, а выход - со счетным входом счетчика, вход установки в ноль которого соединен с передатчиком, элемент И, первый вход которого соединен с выходом приемника, цифровой индикатор для отображения информации о дальности и выходную шину данных для выдачи информации на внешние устройства. В систему введены регистр установленной дальности, ПЗУ, первая и вторая схемы сравнения, регистр выходных данных, сумматор, мультиплексор, первый, второй и третий триггеры, схема задержки, ждущий мультивибратор и второй элемент И, причем информационный выход счетчика импульсов соединен с первыми входами первой и второй схем сравнения и информационным входом регистра выходных данных, выход которого соединен с входом сумматора, входом индикатора и выходной шиной, второй вход первой схемы сравнения соединен с первым выходом ПЗУ, а выход - со вторым входом первого элемента И, третий вход которого соединен с выходом второй схемы сравнения, второй вход которой соединен с выходом мультиплексора, первый вход которого соединен с выходом сумматора, а второй вход - с вторым выходом ПЗУ, вход которого подключен к регистру установленной дальности, передатчик подключен к шине запуска, соединенной с входами ждущего мультивибратора, схемы задержки и входом сброса первого триггера, тактовый вход которого соединен с выходом первого элемента И, а выход соединен с входом регистра выходных данных и с входом данных второго триггера, тактовый вход которого соединен с выходом первого элемента И вход сброса - с выходом схемы задержки, а выход - с индикатором и первым входом второго элемента И, второй вход которого соединен с выходом ждущего мультивибратора, а выход - с входом данных третьего триггера, тактовый вход которого подключен к шине запуска, а выход соединен с входом управления мультиплексора. Технический результат: автоматизация процесса селекции целей с сокращением органов управления. 2 с. и 3 з.п.ф-лы, 1 ил.
| US 3545861 A, 08.12.1970 | |||
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| Унифицированный лазерный бинокль-дальномер модульной конструкции | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Циркуль-угломер | 1920 |
|
SU1991A1 |

