Изобретение относится к устройствам для определения местоположения или обнаружения объектов с использованием радиоволн и предназначено для преобразования данных из полярных координат в прямоугольные, что необходимо при использовании растровых дисплеев совместно с обзорными радиолокационными [РЛ] станциями. Кроме того, устройство может быть использовано в цифровых преобразователях ультразвукового изображения для медицинской диагностики.
Известно устройство по статье "Цифровые преобразователи УЗ-изображения для медицинской диагностики" Дж. Офир и Н. Ф. Маклад (ТИИЭР, 1979, т. 67, 4, с. 251), которое включает в себя средства для преобразования данных, полученных в полярных координатах с целью их отображения на растровом дисплее. Оно содержит буферное запоминающее устройство [ЗУ] данных развертки и кадровое ЗУ, совпадающие с заявляемым устройством. В указанной статье описываются причины, по которым могут возникнуть пропуски записи в кадровое ЗУ между смежными развертками. Это, в первую очередь, недостаточная скорость записи элементов развертки в кадровое ЗУ при увеличении скорости сканирования. В известном устройстве средства для заполнения пропущенных ячеек кадрового ЗУ отсутствуют, поэтому основным методом борьбы с пропусками является сканирование пространства со скоростью не более величины, определяемой примерным соотношением:
где ωmax- максимальная угловая скорость сканирования антенны, рад/сек;
N - количество точек развертки;
fРRF - частота повторения зондирующего импульса.
Из известных устройств наиболее близким аналогом по назначению и технической сущности к предлагаемому устройству является цифровой преобразователь координат по патенту Канады 1210117, G 01 S 7/44 от 23.12.82. Устройство служит для преобразования разверток РЛ станций из полярных координат в декартовы и хранения их в цифровой памяти для дальнейшего отображения на растровых дисплеях.
Устройство содержит буферное ЗУ данных РЛ развертки, кадровое ЗУ, вычислитель положения исходных точек вектора и узел вычисления последующих точек записи, совпадающие с заявляемым изобретением, кроме того, оно содержит средства для заполнения пропущенных ячеек в кадровом ЗУ между записанными развертками. Вход узла вычисления последующих точек записи соединен с выходом вычислителя положения исходных точек вектора, а его выход соединен с адресным входом кадрового ЗУ.
В известном устройстве РЛ данные, представляющие собой интенсивность эхо сигналов в точках РЛ развертки, заносятся в буферное ЗУ данных РЛ развертки. Вычислитель положения исходных точек вектора на основании угла Θi между направлением РЛ развертки и растром дисплея рассчитывает адреса начальных Xi, Yi точек записи РЛ разверток в кадровое ЗУ и элементарные приращения SinΘi и CosΘi для вычисления последующих адресов точек Xi+1, Yi+1 записи вектора. Узел вычисления последующих адресов точек записи определяет адреса записи остальных точек вектора в кадровое ЗУ путем прибавления постоянных величин SinΘi и CosΘi к Xi и Yi. По этим адресам данные из буферного ЗУ последовательно заносятся в кадровое ЗУ. Вместе с этим, после записи каждой новой точки РЛ развертки, данные из рассчитанных ячеек буферного ЗУ данных РЛ развертки последовательно заносятся в пропущенные ячейки кадрового ЗУ вдоль одной из ортогональных осей до достижения записанной ячейки предыдущего смежного вектора.
Недостатком известного устройства является то, что требуется слишком много времени на заполнение пропущенных ячеек кадрового ЗУ, а это ограничивает скорость сканирования антенны, поскольку следующая РЛ развертка не может быть обработана, пока не закончилось заполнение пустых ячеек, при той же частоте повторения зондирующих импульсов.
Задачей предлагаемого изобретения является увеличение скорости сканирования антенны при сохранении максимальной слитности отображения РЛ разверток на экране растрового дисплея.
Сущность предлагаемого изобретения заключается в том, что в цифровой преобразователь разверток, содержащий буферное ЗУ данных РЛ развертки, вычислитель положения исходных точек вектора, узел вычисления последующих адресов точек записи и кадровое ЗУ, причем вход узла вычисления последующих адресов точек записи соединен с выходом вычислителя положения исходных точек вектора, а его выход соединен со входом адреса кадрового ЗУ; дополнительно введены сдвиговый регистр РЛ данных, ПЗУ параллельного заполнения РЛ данными фиксированной зоны, узел вычисления расстояния между смежными векторами в точке записи и ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, при этом выход буферного ЗУ данных РЛ развертки соединен со входом сдвигового регистра РЛ данных, выход которого соединен с первым входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны, выход которого соединен со входом данных кадрового ЗУ, вход кода пеленга луча РЛ развертки соединен со вторым входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны и первым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, выход узла вычисления последующих адресов точек записи соединен с третьим входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны и со вторым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, вход узла вычисления расстояния между смежными векторами в точке записи соединен с выходом вычислителя положения исходных точек вектора, а его выход соединен с третьим входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, а вход разрешения записи кадрового ЗУ соединен с выходом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны.
Это дает возможность одновременно записывать в ячейки кадрового ЗУ и данные каждой точки РЛ развертки, и данные в те ячейки между смежными РЛ развертками, которые были бы пропущены при однократной записи точек РЛ разверток. Поэтому не тратится время на заполнение пропущенных ячеек, что ведет к увеличению скорости сканирования антенны.
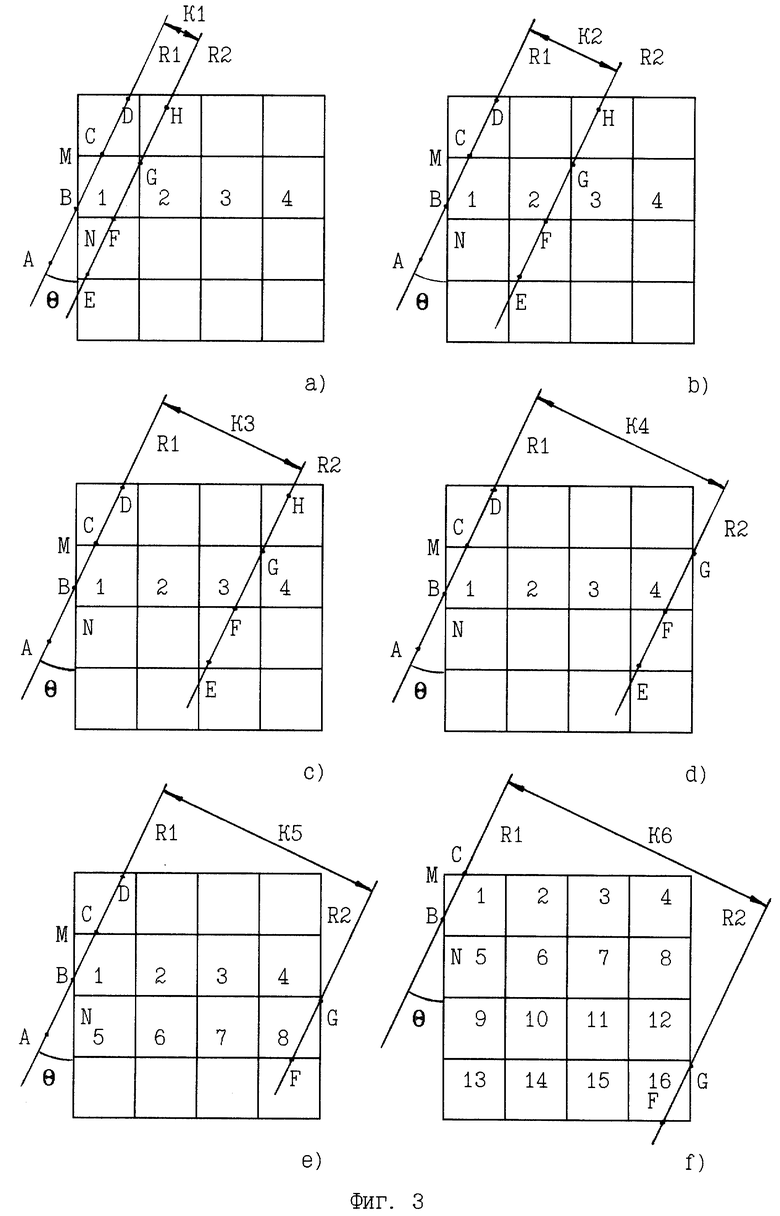
Сущность предлагаемого изобретения поясняется чертежами, где на фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 изображен пример заполнения ячеек фиксированной зоны кадрового ЗУ размером 4 на 4 элемента кодами данных; на фиг. 3 условно изображена фиксированная зона кадрового ЗУ размером 4 на 4 элемента, на которой дана иллюстрация определения минимального расстояния между смежными РЛ развертками, при котором возможен пропуск подряд в одной строке этой зоны соответственно от одной до четырех ячеек, пропуск двух строк и пропуск всей зоны ячеек кадрового ЗУ при записи точек смежных РЛ разверток.
Предлагаемый цифровой преобразователь разверток (фиг. 1) содержит буферное ЗУ данных РЛ развертки 1, вычислитель положения исходных точек вектора 2, узел вычисления последующих адресов точек записи 3, кадровое ЗУ 4, сдвиговый регистр РЛ данных 5, ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6, узел вычисления расстояния между смежными векторами в точке записи 7 и ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8. Вход узла вычисления последующих адресов точек записи 3 соединен с входом вычислителя положения исходных точек вектора 2, а его выход соединен со входом адреса кадрового ЗУ 4. Выход буферного ЗУ данных РЛ развертки 1 соединен со входом сдвигового регистра РЛ данных 5, а его вход со входом кодов данных РЛ развертки. Выход сдвигового регистра РЛ данных 5 соединен с первым входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6, выход которого соединен со входом данных кадрового ЗУ 4. Вход кода пеленга луча РЛ развертки соединен со вторым входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6 и первым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8. Выход узла вычисления последующих адресов точек записи 3 соединен с третьим входом ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6 и со вторым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8. Вход узла вычисления расстояния между смежными векторами в точке записи 7 соединен с выходом вычислителя положения исходных точек вектора 2, а его выход соединен с третьим входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8. Вход разрешения записи кадрового ЗУ 4 соединен с выходом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8.
Сдвиговый регистр РЛ данных 5 может быть реализован, например, на интегральной микросхеме [ИМС] К555ИР8 (Цифровые интегральные микросхемы. Справочник. Мальцев П. М. и др. - М. : Радио и связь, 1994). Количество микросхем для его реализации определяется разрядностью кодов данных РЛ развертки и размером фиксированной зоны записи. Разрядность сдвигового регистра РЛ данных выбирается следующим образом. Например, если фиксированная зона состоит из 16 элементов (4 на 4 элемента) и угол между направлением РЛ развертки и вертикальной осью кратен 90o, тогда, если внутри фиксированной зоны адресуется только одна из угловых ячеек между смежными РЛ развертками, проходящими через эту зону, то в этом случае необходимо на входе кадрового ЗУ иметь данные трех точек РЛ развертки до адресуемой точки и трех после, чтобы заполнить соответствующими данными всю фиксированную зону. Итого, со сдвигового регистра РЛ данных необходимо снять данные семи точек РЛ развертки.
ПЗУ параллельного заполнения данными фиксированной зоны 6 и ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8 могут быть, например, реализованы на ИМС ПЗУ 556РТ10 или КР556РТ9А (Каталог ИМС. Однократно программируемые и репрограммируемые постоянные запоминающие устройства. ГЦКБ "Дейтон", 1993). Количество этих ИМС определяется размером фиксированной зоны записи и разрядностью кодов данных РЛ развертки.
Таблица прошивки ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6 составляется следующим образом. Пусть, например, размер фиксированной зоны - 16 ячеек (4 на 4 элемента). Через исходную точку D (см. фиг. 2), для которой заданы координаты на третьем входе указанного ПЗУ (для данных центрального элемента сдвигового регистра РЛ данных 5), расположенную в центре элемента (клетки), обозначающего выбранную ячейку (например, номер 6) фиксированной зоны, проводится первая прямая линия R1 под углом Θ к оси ординат (в пределах 0. . . 360o), задаваемым кодом на втором входе указанного ПЗУ. На этой прямой на расстояниях, кратных размеру стороны MN клетки по обе стороны от исходной точки D, расставляются точки A, B, C, E, F и G, обозначающие расположение остальных точек РЛ развертки в соответствии с кодом данных, представленным на первом входе указанного ПЗУ. Через точки A, B, C, D, E, F и G проводятся прямые линии Н1, Н2, . . . Н7, перпендикулярные первой прямой R1. Каждой проведенной прямой ставится в соответствие код данных той точки, через которую она проведена. Каждому элементу (клетке) зоны присваивается код данных той прямой, длина отрезка которой в данном элементе наибольшая. При равенстве длин отрезков прямых присваивается любой из кодов данных, например, той прямой, которая расположена ближе к прямой, проведенной через исходную точку D. Например, элементу 1 присваивается код данных прямой Н4, элементу 2 - Н5, элементу 3 - Н5, элементу 4 - Н6, элементу 5 - Н3, элементу 6 - Н4, элементу 7 - Н5 и т. д. Указанное ПЗУ программируется так, чтобы для каждого кода угла Θ, подаваемого на второй вход указанного ПЗУ при выборе последовательно каждой ячейки фиксированной зоны кодом, подаваемым на третий вход указанного ПЗУ, на его выходе появлялись данные в соответствии с изложенным принципом.
Таблица прошивки ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8 составляется следующим образом. Пусть, например, размер фиксированной зоны - 16 ячеек (4 на 4 элемента). Рассмотрим алгоритм программирования указанного ПЗУ для углов Θ, лежащих в пределах от 0 до 45o, для которых размножение записываемых ячеек осуществляется вдоль горизонтальной оси. Найдем минимальное расстояние между смежными РЛ развертками, при котором возможен пропуск подряд в одной строке указанной зоны соответственно от одной до четырех ячеек, пропуск двух строк и пропуск всей зоны ячеек кадрового ЗУ при записи точек смежных РЛ разверток. Ввиду малого расстояния между развертками по сравнению с длиной РЛ развертки, линии этих разверток внутри фиксированной зоны можно считать параллельными.
Под углом Θ, задаваемым кодом на первом входе этого ПЗУ, проводится прямая линия R1 первой РЛ развертки через выбранную ячейку (клетку) так, чтобы точки А, В, С и D не попали в рассматриваемую клетку, например номер 1, причем длина отрезка этой линии R1 внутри этой выбранной клетки должна быть максимальной (см. фиг. 3а). Точки А, В, С и D расположены на прямой R1 на расстояниях друг от друга, равных стороне MN клетки, и обозначают точные места выборки ячеек при записи каждой точки РЛ развертки. Параллельно первой прямой линии на некотором расстоянии К1 через выбранную клетку проводится линия второй РЛ развертки R2, содержащая аналогичные точки Е, F, G и Н, так, чтобы ни одна точка не попала в ту же выбранную клетку и длина отрезка второй линии в этой клетке была бы максимальной.
Аналогично проводятся линии РЛ разверток для условий пропуска двух, трех и т. д. ячеек подряд в строке фиксированной зоны. Например, в случае пропуска двух ячеек подряд делаем следующие построения (см. фиг. 3в). Параллельно прямой линии первой РЛ развертки R1 через клетку, смежную с уже пропущенной по горизонтальной оси, проводится линия второй РЛ развертки R2, содержащая указанные точки, так, чтобы ни одна точка не попала в обе эти клетки и длина отрезка второй линии в этой смежной клетке была бы максимальной.
Из геометрии минимальные расстояния между смежными РЛ развертками, при которых соблюдаются условия пропуска заданного количества смежных ячеек в строках, определяются формулами (вывод формул см. в приложении):





где Θ- угол между направлением РЛ развертки и вертикальной осью координат;
К1, К2, К3, К4 - минимальное расстояние между смежными РЛ развертками, при котором возникает возможность пропуска соответственно одной, двух, трех и четырех ячеек, расположенных подряд в одной строке фиксированной зоны кадрового ЗУ 4;
К5 и К6 - минимальное расстояние между смежными РЛ развертками, при котором возникает возможность пропуска соответственно двух строк и пропуска всех ячеек фиксированной зоны кадрового ЗУ 4.
Очевидно, если на третьем входе указанного ПЗУ текущее расстояние Ki между смежными РЛ развертками в точке записи меньше К1, то пропуска ячейки не будет и указанное ПЗУ программируется так, чтобы соответствующий сигнал с его выхода выбирал только одну ячейку записи в фиксированной зоне, адресуемую сигналом на втором входе указанного ПЗУ.
Если Ki меньше К2 и больше К1, то может быть пропущена только одна ячейка между смежными РЛ развертками. Например, если произошла запись в первую ячейку строки, то вторая может быть пропущена. При пропуске второй, в третью ячейку обязательно произойдет запись, а четвертая может быть пропущена. Если же при записи была пропущена первая ячейка, то обязательно будет произведена запись во вторую ячейку, но третья ячейка может быть пропущена. Поэтому, если в первую ячейку произвести одиночную запись, а при записи в третью ячейку параллельно записать данные во вторую и четвертую ячейки, то пропусков ячеек в строке фиксированной зоны не будет. Поэтому, если на третьем входе указанного ПЗУ значение Ki меньше К2 и больше К1, то выход этого ПЗУ программируется так, чтобы соответствующий сигнал с его выхода выбирал только одну ячейку записи, если адресуется любая крайняя ячейка строки фиксированной зоны. При адресации средних ячеек строки фиксированной зоны выход этого ПЗУ программируется так, чтобы выбиралась эта ячейка и по одной смежной ячейке строки справа и слева от указанной.
Если Ki меньше К3 и больше К2, то могут быть пропущены не более двух ячеек подряд в одной строке фиксированной зоны кадрового ЗУ между смежными РЛ развертками. Например, если произошла запись в первую ячейку строки, то вторая и третья ячейки могут быть пропущены, а в четвертую ячейку обязательно произойдет запись. Если же запись была во вторую ячейку, то первая, третья и четвертая ячейки могут быть пропущены. Поэтому, при записи в первую ячейку необходимо параллельно записывать данные во вторую ячейку, а при записи в четвертую ячейку - в третью. Аналогично, при исходной записи во вторую ячейку необходимо производить запись в первую, третью и четвертую ячейки. При этом пропусков ячеек в строке фиксированной зоны не будет. Отсюда следует соответствующий алгоритм программирования указанного ПЗУ.
Если Ki меньше К4 и больше К3, то могут быть пропущены не более трех ячеек подряд в одной строке фиксированной зоны кадрового ЗУ между смежными РЛ развертками. Очевидно, при таком Ki может возникнуть случай, когда будет происходить запись только в одну ячейку фиксированной зоны кадрового ЗУ. Поэтому указанное ПЗУ программируется так, чтобы соответствующие сигналы с выхода этого ПЗУ выбирали все ячейки той строки, одна из ячеек которой была адресована на втором входе указанного ПЗУ.
Если Ki меньше К5 и больше К4, то могут быть пропущены не более четырех ячеек подряд в одной строке фиксированной зоны между смежными РЛ развертками, но при этом обязательно произойдет запись в ячейку смежной строки. Поэтому указанное ПЗУ в этом случае программируется так, чтобы соответствующие сигналы с выхода этого ПЗУ выбирали все ячейки сразу двух строк, если была адресована любая из ячеек, принадлежащая строке фиксированной зоны кадрового ЗУ.
Если Ki меньше К6 и больше К5, то может возникнуть случай, когда произойдет запись только в одну ячейку фиксированной зоны кадрового ЗУ. Следовательно, при такой величине Ki указанное ПЗУ программируется так, чтобы при адресации любой ячейки на втором входе этого ПЗУ, сигнал с его выхода при этом выбирал бы все ячейки фиксированной зоны кадрового ЗУ.
Алгоритм программирования ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8 для углов Θ, лежащих в пределах от 135 до 255o, отличается от описанного тем, что вместо угла Θ в формулы (2)-(7) подставляется угол Θ1, равный по абсолютной величине разности углов 180o и Θ, а для углов, лежащих в пределах от 315 до 360o - подставляется угол Θ1, равный разности углов 360o и Θ. Алгоритм программирования указанного ПЗУ для углов Θ, лежащих в пределах от 45 до 135o, отличается от описанного тем, что вместо угла Θ в формулы (2)-(7) подставляется угол Θ1, равный по абсолютной величине разности углов 90o и Θ, а для углов, лежащих в пределах от 225 до 315o - подставляется угол Θ1, равный по абсолютной величине разности углов 270o и Θ, при этом размножение записываемых ячеек осуществляется вдоль вертикальной оси.
Узел вычисления расстояния между смежными векторами в точке записи 7 представляет собой схему, реализующую вычисление выражения в тактах записи точек вектора:
где Ki - расстояние между смежными РЛ развертками в точке записи;
Кнач - расстояние между концами смежных РЛ разверток в начале записи;
ΔK- приращение расстояния между точкой записи и смежным вектором для следующей точки записи;
i - текущий номер записываемой точки РЛ развертки.
Указанная схема может быть реализована так же, как узел вычисления последующих адресов точек записи 3 для расчета адресов записи по одной из координат.
Буферное ЗУ данных РЛ развертки 1 представляет собой оперативное ЗУ, состоящее, например, из двух ОЗУ, работающих в режиме "пинг-понг" (поочередное переключение обоих ОЗУ из режима чтения в режим записи). Оно может быть реализовано, например, на ИМС К541РУ2А (Большие интегральные схемы запоминающих устройств. Справочник. Гордонов А. Ю. и др. - М. : Радио и связь, 1990).
Кадровое ЗУ 4 представляет собой оперативное ЗУ, имеющее фиксированные зоны заданного размера. Фиксированная зона представляет собой группу смежных ячеек матрицы кадрового ЗУ 4, расположенных в виде квадрата с заданным количеством ячеек, например, 16 ячеек (квадрат 4 на 4). Все ячейки фиксированной зоны имеют одинаковый адрес записи. Выбор группы ячеек, входящих в функциональную зону, для одновременной записи в них информации осуществляется подачей на каждую из выбранных ячеек этой зоны соответствующих управляющих сигналов (например, выбора кристалла и разрешения записи). Кадровое ЗУ может быть реализовано, например, на ИМС КР537РУ19 или КР132РУ10А (Большие интегральные схемы запоминающих устройств. Справочник. Гордонов А. Ю. и др. - М. : Радио и связь, 1990).
Так, например, если объем кадрового ЗУ 4 1024•1024•4 элементов, то при использовании ИМС КР132РУ10А, имеющих организацию 64К•1, получим 4 слоя ЗУ, соответствующих коду данных с шестнадцатью указанными ИМС в каждом слое. Все адресные входы указанных ИМС поразрядно соединены между собой.
Вычислитель положения исходных точек вектора 2 представляет собой универсальное вычислительное средство, которое можно реализовать, например, использовав набор ИМС серии К1816 (Микропроцессоры и микропроцессорные комплекты интегральных микросхем. Справочник, т. 2, Абрайтис В. -Б. Б. и др. Под ред. Шахнова В. А. - М. : Радио и связь, 1988).
Предлагаемое устройство работает следующим образом. РЛ данные, представляющие собой интенсивность эхо сигналов в точках РЛ развертки со входа кодов данных РЛ развертки, заносятся в буферное ЗУ данных РЛ развертки 1, которое состоит из двух ОЗУ, работающих в режиме "пинг-понг". Вычислитель положения исходных точек вектора 2 на основании значения угла Θi между направлением РЛ развертки и осью ординат рассчитывает адреса начальных Xi, Yi точек записи вектора в кадровое ЗУ 4 и элементарные приращения SinΘi и CosΘi для вычисления последующих адресов точек Xi+1, Yi+1. На основании величины угла между смежными векторами и длины вектора, он рассчитывает расстояния между смежными векторами в начальной Кнач и конечной Ккон точках записи вектора и постоянное элементарное приращение расстояния между смежными векторами в каждой последующей точке записи ΔK, один раз для каждой новой РЛ развертки. Например, в режиме кругового обзора начальное расстояние между смежными векторами Кнач равно нулю, а конечное расстояние Ккон рассчитывается как произведение количества точек РЛ развертки (длины вектора) N и синуса угла ΔΘ между смежными РЛ развертками. Элементарное приращение расстояния ΔK равно Ккон, деленному на N, т. е. равно синусу угла ΔΘ между смежными РЛ развертками.
Перед началом процесса записи точек РЛ развертки в кадровое ЗУ 4 в первую очередь обнуляется сдвиговый регистр РЛ данных 5, затем осуществляется заполнение указанного регистра данными из буферного ЗУ данных РЛ развертки 1 до тех пор, пока данные первой точки РЛ развертки окажутся в середине выходного слова сдвигового регистра РЛ данных 5. Выходное слово со сдвигового регистра РЛ данных 5, представляющее собой коды яркости нескольких точек РЛ развертки, поступает на первый адресный вход ПЗУ параллельного заполнения РЛ данными фиксированной зоны 6, на второй вход которого поступает код угла между направлением РЛ развертки и положительным направлением оси ординат, а на третий его вход - координаты текущей точки записи РЛ развертки внутри фиксированной зоны.
Указанные координаты текущей точки для зоны четыре на четыре ячейки представляют собой по два младших разряда адресов записи точек РЛ развертки по осям Х и Y, вырабатываемых узлом вычисления последующих адресов точек записи 3. Остальные разряды с узла вычисления последующих адресов точек записи 3 (т. е. без двух младших разрядов по осям Х и Y) поступают на адресные входы кадрового ЗУ 4.
После записи первой точки РЛ развертки узел вычисления последующих адресов точек записи 3 определяет адреса записи остальных точек РЛ развертки в кадровое ЗУ 4 путем прибавления постоянных величин SinΘ и CosΘ к Xi и Yi. Одновременно коды данных последовательно считываются из буферного ЗУ данных РЛ развертки 1 и сдвигаются в сдвиговом регистре РЛ данных 5, с которого параллельно считываются коды яркости нескольких точек РЛ развертки. В тот же момент узел вычисления расстояния между смежными векторами в точке записи 7 на основании элементарных приращений расстояний между смежными векторами выдает код расстояния между смежными векторами в точке записи, который поступает на третий адресный вход ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8. На первый вход указанного ПЗУ подается двоичный код угла между направлением РЛ развертки и осью ординат, а на второй - координаты текущей точки записи РЛ развертки внутри фиксированной зоны. В моменты записи каждой точки РЛ развертки в кадровое ЗУ 4 происходит адресация выбранной фиксированной зоны кадрового ЗУ 4, на входах данных кадрового ЗУ 4 одновременно присутствуют коды данных всех ячеек фиксированной зоны, а на входах выбора ячеек записи указанного ЗУ присутствуют сигналы, позволяющие записывать информацию либо в одну ячейку, либо одновременно в группу ячеек. Причем, размер и конфигурация записываемого фрагмента определяется в зависимости от его положения относительно записанной смежной РЛ развертки. В результате никаких дополнительных действий по заполнению пропущенных ячеек между записываемой и смежной РЛ развертками делать не нужно, поскольку нет пропущенных ячеек.
Найдем максимальную угловую скорость сканирования антенны, при которой не возникает пропусков ячеек между смежными РЛ развертками при однократной записи каждой точки исходной РЛ развертки в кадровое ЗУ 4. На основании расчета (см. приложение) минимального расстояния между концами смежных РЛ разверток, при котором возможен пропуск одной ячейки кадрового ЗУ 4, и формулы (1), которая справедлива для углов Θ, кратных 90o, имеем:
где ω- угловая скорость сканирования антенны;
К1 - минимальное расстояние между концами смежных РЛ разверток, при котором возможен пропуск одной ячейки кадрового ЗУ, выраженное в размерности стороны клетки (ячейки) кадрового ЗУ 4;
fРRF - частота повторения зондирующего импульса РЛ станции;
N - количество точек РЛ развертки;
TPRF - период повторения зондирующего импульса РЛ станции;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ 4;
Θ- угол между направлением РЛ развертки и направлением вертикальной оси, выраженный в радианах.
Из формулы (2) видно, что К1 принимает минимальное значение при углах Θ, близких к 45, 135, 225, 315o . Подставляя их значение в формулу (9), получим:
где ωmax- максимальная угловая скорость сканирования антенны;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ;
N - количество точек РЛ развертки.
Найдем максимальную угловую скорость сканирования антенны при условии отсутствия пропусков ячеек между смежными векторами и однократной записи каждой точки исходной РЛ развертки в кадровое ЗУ 4 для предлагаемого устройства. При использовании предлагаемого устройства с фиксированной зоной, например, состоящей из 16 ячеек (4 на 4 элемента) кадрового ЗУ, максимальная угловая скорость сканирования антенны определяется на основании расчета минимального расстояния между концами смежных РЛ разверток, при котором возникает возможность пропуска всех ячеек, принадлежащих одной фиксированной зоне между смежными РЛ развертками (см. приложение) и формулы (1), которая справедлива для углов, кратных 90o. Проведя преобразования, аналогичные формуле (9), получим:
где ω- угловая скорость сканирования антенны;
К6 - минимальное расстояние между концами смежных РЛ разверток, при котором возникает возможность пропуска всех ячеек одной фиксированной зоны кадрового ЗУ 4, выраженное в размерности стороны клетки (ячейки) кадрового ЗУ 4;
fРRF - частота повторения зондирующего импульса РЛ станции;
N - количество точек РЛ развертки;
Θ- угол между направлением РЛ развертки и направлением вертикальной оси, выраженный в радианах;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ 4.
Из формулы (7) видно, как К6 принимает минимальное значение при углах Θ, близких к 0, 90, 180 и 270o. Подставляя их значения в формулу (11), получим:
где ωmax- максимальная угловая скорость сканирования антенны;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ 4;
N - количество точек РЛ развертки.
Из сравнения формул (10) и (12) видно, что при однократной записи каждой точки РЛ развертки в кадровое ЗУ 4, скорость сканирования антенны можно увеличить примерно в 9,65 раза, если применить предложенное устройство.
По сравнению с прототипом нет необходимости после записи каждой точки РЛ развертки производить дополнительные операции по записи информации в пропущенные ячейки кадрового ЗУ 4 между смежными РЛ развертками. По приблизительным подсчетам эти операции занимают время, определяемое выражением:
T = t•K•N/2, (13)
где Т - время заполнения всех пропущенных ячеек между смежными РЛ развертками;
t - время, затраченное на операции по подготовке и по записи информации в одну пропущенную ячейку;
К - расстояние между концами смежных разверток в размерности стороны клетки (ячейки) кадрового ЗУ 4;
N - количество точек РЛ развертки.
Аналогично формуле (9) имеем:
где ω- угловая скорость сканирования антенны;
К - расстояние между концами смежных разверток в размерности стороны клетки (ячейки) кадрового ЗУ 4;
TPRF - период повторения зондирующего импульса РЛ станции;
N - количество точек РЛ развертки;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ 4;
t - время, затраченное на операции по подготовке и по записи информации в одну пропущенную ячейку;
tподг - время подготовки информации для записи в пропущенную ячейку (время расчета адреса и время считывания данных из буферного ЗУ для заполнения пропущенных ячеек, плюс время расчета адреса остановки заполнения, плюс время сравнения адреса записи и адреса остановки и плюс время возврата в исходное положение для записи следующей точки РЛ развертки).
Сравним формулы (12) и (14). Пусть для определенности расстояние между концами смежных РЛ разверток равно четырем. Для упрощения и грубой оценки предположим, что время подготовки информации для записи в пропущенные ячейки tподг равно нулю. Тогда формула (14) преобразуется к виду: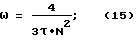
где ω- угловая скорость сканирования антенны;
τ- время записи данных одной точки РЛ развертки в ячейку кадрового ЗУ;
N - количество точек РЛ развертки.
Угловая скорость сканирования антенны, рассчитанная по формуле (12), в три раза больше, чем рассчитанная по формуле (15).
Отсюда следует, что угловую скорость сканирования антенны можно увеличить не менее чем в три раза по сравнению с известным по патенту Канады 1210117 устройством (прототипом).
Если в обзорной РЛ станции для устранения больших пропусков изображения на растровом дисплее применяется запись дополнительных разверток между исходными смежными РЛ развертками так, чтобы расстояние между концами записанных разверток не превышало размер выбранной фиксированной зоны кадрового ЗУ, то используя зонную запись точек РЛ развертки, реализуемую предлагаемым устройством, можно получить максимальную слитность РЛ изображений при угловых скоростях сканирования антенны, превышающих допустимые угловые скорости сканирования антенны у известных аналогов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения информации на экране телевизионного индикатора | 1976 |
|
SU633042A1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2163391C1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
| Устройство для отображения информацииНА эКРАНЕ элЕКТРОННО-лучЕВОй ТРубКи | 1978 |
|
SU807368A1 |
| Устройство для автоматической компенсации неравномерности фона видеосигнала | 1980 |
|
SU924914A2 |
| Устройство для обработки изображений | 1988 |
|
SU1603408A1 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1995 |
|
RU2093969C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1986 |
|
SU1381584A1 |
| Устройство для отображения графической информации на экране цветного телевизионного индикатора | 1990 |
|
SU1836719A3 |
| Генератор векторов | 1979 |
|
SU924741A1 |

Изобретение относится к устройствам для определения местоположения или обнаружения объектов с использованием радиоволн и предназначено для быстрого преобразования из полярных координат и записи данных радиолокационных (РЛ) разверток в ЗУ, имеющее прямоугольные координаты для их последующего отображения на растровом дисплее. Цифровой преобразователь разверток содержит буферное ЗУ кодов яркости точек РЛ развертки 1, вычислитель адресов записи начальных точек РЛ развертки 2, узел вычисления адресов записи последующих точек 3 и кадровое ЗУ 4. Новым в устройстве является наличие сдвигового регистра 5, ПЗУ параллельного заполнения кодами яркости точек РЛ развертки 6, узла вычисления расстояния между смежными развертками в момент записи точек РЛ развертки 7, ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны 8, соединенные соответствующим образом. Цифровой преобразователь разверток осуществляет одновременную запись группы точек РЛ развертки в виде фрагмента с определяемыми конфигурацией и размером в кадровое ЗУ, обеспечивая максимальную слитность их отображения при высокой скорости сканирования антенны, что является достигаемым техническим результатом. Цифровой преобразователь разверток может быть использован в обзорных РЛ станциях, а также в преобразователях ультразвукового изображения для медицинской диагностики. 3 ил.
Цифровой преобразователь разверток, содержащий буферное запоминающее устройство (ЗУ) кодов яркости точек радиолокационной (РЛ) развертки, вычислитель адресов записи начальных точек РЛ развертки, расстояний и элементарных приращений, узел вычисления адресов записи последующих точек РЛ развертки и кадровое ЗУ, причем вход узла вычисления адресов записи последующих точек РЛ развертки соединен с выходом вычислителя адресов записи начальных точек РЛ развертки, расстояний и приращений, а выход соединен с входом адреса кадрового ЗУ, отличающийся тем, что он снабжен сдвиговым регистром кодов яркости точек РЛ развертки, постоянным ЗУ (ПЗУ) параллельного заполнения кодами яркости точек фиксированной зоны, узлом вычисления расстояния между смежными развертками в момент записи точек РЛ развертки и ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, при этом вход буферного ЗУ кодов яркости точек РЛ развертки соединен с входом кодов яркости точек РЛ развертки, а выход буферного ЗУ кодов яркости точек РЛ развертки соединен с входом сдвигового регистра кодов яркости точек РЛ развертки, выход которого соединен с первым входом ПЗУ параллельного заполнения кодами яркости точек фиксированной зоны, выход которого соединен с входом данных кадрового ЗУ, вход кода угла между направлением РЛ развертки и положительным направлением оси ординат соединен со вторым входом ПЗУ параллельного заполнения кодами яркости точек фиксированной зоны и первым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, выход узла вычисления адресов записи последующих точек РЛ развертки соединен с третьим входом ПЗУ параллельного заполнения кодами яркости точек фиксированной зоны и со вторым входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, вход узла вычисления расстояния между смежными развертками в момент записи точки РЛ развертки соединен с выходом вычислителя адресов записи начальных точек РЛ развертки, расстояний и элементарных приращений, его выход соединен с третьим входом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны, а вход разрешения записи кадрового ЗУ соединен с выходом ПЗУ конфигурации и размера записываемого фрагмента фиксированной зоны.
| Горизонтальный меридианный инструмент | 1984 |
|
SU1210117A1 |
| US 5235338 A, 10.08.1993 | |||
| DE 19607733 A1, 04.09.1997 | |||
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СВАРКИ ВНУТРЕННИХ СПИРАЛЬНЫХ И КОЛЬЦЕВЫХ ШВОВ | 0 |
|
SU351654A1 |
| US 5554922 A, 10.09.1996 | |||
| RU 2070725 C1, 20.12.1996. | |||

