Изобретение относится к области радиолокационных измерений с использованием Фурье-оптики и постороннего излучения и может найти применение при контроле воздушной среды с помощью радиолокационных средств, а также в научных исследованиях проблем обнаружения целей с малыми эффективными поверхностями рассеяния (ЭПР) на фоне помех.
Известен способ обнаружения объектов с помощью прожекторного луча, при котором объект освещают расходящимся пучком света и регистрируют его видимую яркость на окружающем световом фоне, образованном однократным и многократным рассеянием света атмосферой, а также светом, исходящим от фона, на который проектируется прожекторный пучок (Ю. С. Георгиевский. А. Я. Дривинг, Н. В. Золотавина, Г. В. Розенберг, Е. М. Фейгельсон, В. С. Хазанов. Прожекторный луч в атмосфере. Исследования по атмосферной оптике. М. , АН СССР, 1960, с. 5). К недостаткам данного способа можно отнести то, что вероятность обнаружения в значительной степени зависит от метеорологических условий, времени суток и резко снижается при ухудшении метеорологической обстановки.
Также известен способ обнаружения объектов с помощью зондирующих импульсов радиолокационного диапазона, при котором объект облучают последовательностью электромагнитных импульсов, после чего обрабатывают отраженные импульсы с целью извлечения информации о наличии объекта и его параметров (В. А. Чердынцев, Радиотехнические системы. Минск, Высшая школа, 1988, с. 14).
К недостаткам этого способа можно отнести недостаточно высокую вероятность обнаружения точечных целей или объектов, имеющих малую ЭПР при относительно больших геометрических размерах (объемах)
Известен способ определения параметров цели с помощью лазерного излучения, заключающийся в зондировании контролируемого объема пространства импульсами видимого или инфракрасного спектральных диапазонов, после чего измеряют время прохождения излучения до цели и определяют ее дальность, а также угловые координаты (Е. Ф. Белов, Б. С. Губанов, В. Я. Зельченко, В. В. Павлов, С. Н. Шаров. Проектирование и эксплуатация лазерных приборов в судостроении. Ленинград. Судостроение, 1986. с. 214).
Недостатком этого способа является относительно большое время поиска цели и большая вероятность ее пропуска из-за узкой диаграммы направленности лазерных средств.
Также известен способ измерения толщины льда, при котором могут использоваться как импульсные, так и непрерывные радиолокационные сигналы, при этом последовательно измеряются коэффициенты взаимной корреляции отраженных и эталонных сигналов от льдов различной толщины, предварительно записанных в память электронно-вычислительной машины (ЭВМ), и по положению максимума полученной функции определяют толщину льда (В. В. Богородский, А. Г. Оганесян. Проникающая радиолокация морских и пресноводных льдов с цифровой обработкой сигналов. Ленинград, Гидрометеоиздат, 1987, с. 40). Этот способ принимаем за прототип. К недостаткам данного способа можно отнести сравнительно низкую точность определения толщины льдов особенно в тех случаях, когда изменение толщины носит переменный характер и возникает необходимость использования электромагнитного излучения оптического диапазона.
Техническим результатом изобретения является повышение вероятности обнаружения объектов (целей) с относительно малой ЭПР в контролируемом объеме воздушной среды.
Технический результат достигается тем, что перед обработкой радиосигналов воздушную среду контролируемого объема ионизируют для создания градиента заряженных частиц (электронов) в направлении действия зондирующих импульсов, в результате чего в воздушной среде образуются области с разными концентрациями электронов по глубине контролируемого объема и обладающими различными частотными свойствами, а в процессе зондирования определяют зависимость частоты отраженных сигналов различных областей от глубины в пределах контролируемого объема, затем находят нормированные значения корреляционной функции зондирующих и отраженных сигналов при найденных значениях глубины расположения этих областей, после этого повторяют действия по нахождению нормированных значений корреляционной функции в присутствии объектов и сравнивают эти значения с соответствующими ранее определенными значениями, после чего определяют положение объектов по дальности в пределах контролируемого объема.
Новизна изобретения выявлена из сравнения с прототипом и заключается в следующем:
- во-первых, воздушную среду в контролируемом объеме искусственно создают на время действия зондирующих импульсов с целью придания этой среде заданных свойств, обуславливающих повышенную вероятность обнаружения объектов с малой ЭПР;
- во-вторых, используют статистическую связь между зондирующими и отраженными импульсами не только от целей, но и от различных областей созданной таким образом воздушной среды при нахождении объектов (целей) и при их отсутствии.
Предлагаемый способ обнаружения воздушных целей основан на эффекте вытеснения заряженных частиц (электронов) объектами и пропорционально их объему, в результате чего нарушается установившееся динамическое распределение их концентрации по областям и, как следствие, характер статистической связи зондирующих и отраженных импульсов от этих областей в присутствии объектов (целей) в контролируемом объеме и при их отсутствии. При этом происходит усиление возмущений в воздушной ионизированной среде объектами, не прозрачными для ионизирующего излучения, и тем сильнее, чем больше объем этих объектов (при относительно малой ЭПР в радиодиапазоне), что характерно для целей, изготовленных с применением стелсовых технологий.
Для обеспечения прохождения зондирующих импульсов по всей глубине контролируемого объема воздушной среды, а также с целью расширения этого объема и улучшения отражающих свойств соответствующих областей ионизацию его воздушной среды производят лазерным излучением в виде узкого пучка, сканирующим контролируемый объем одновременно в вертикальном и горизонтальном направлениях. Предлагаемый способ реализуется с помощью устройства, представленного на чертеже.
В процессе работы воздушную среду в контролируемом объеме Q ионизируют с помощью лазерного устройства 1 и блока развертки лазерного луча 2, одновременно облучая ее радиоимпульсами с плавно изменяющейся частотой определенной длительности и периодом следования с помощью приемопередающего устройства, состоящего из антенны 3, коммутатора 4, передатчика 5, приемника 6, импульсного модулятора 7, цифрового индикатора 8. генератора развертки 9, устройства задержки 10, затем отраженные и зондирующие импульсы подают соответственно на акусто-оптический 14 и амплитудный 12 модуляторы лазерного излучения акусто-оптического коррелятора, куда дополнительно входят лазер 11, коллиматор 13, первый Фурье-преобразующий объектив 15, пространственно-частотный фильтр 16, второй фурье-преобразующий объектив 17, фотоприемное устройство 18, затем обработанные сигналы преобразуют в цифровую форму в аналого-цифровом преобразователе 19 и через согласующее устройство 20 подают в ЭВМ 21 с целью накопления, выборки, вычисления нормированных значений корреляционной функции и проведения их сравнительного анализа.
Для обеспечения одновременности действия радиоимпульсов и лазерного излучения применяют синхронизирующее устройство С, причем их направляют в контролируемый объем таким образом, чтобы сканирование лазерного луча в горизонтальном и вертикальном направлениях происходило бы по всей ширине диаграммы направленности радиоантенны, а ионизация контролируемого объема воздушной среды Q по глубине L обеспечивалась бы регулированием мощности лазерного излучения с длиной волны, соответствующей потенциалу ионизации воздушной среды.
Для определения зависимости частоты отраженных сигналов от различных областей ионизированной воздушной среды устанавливают некоторую рабочую частоту передатчика, при которой зондирующие импульсы отражаются от той области, где собственная частота toi равна рабочей частоте fi, далее изменяют рабочую частоту в сторону уменьшения и в сторону увеличения и отмечают соответствующие значения дальности Li расположения областей, начиная от самой ближней на дальности Li и кончая наиболее удаленной, расположенной на дальности L3, причем собственные частоты областей и их электронные плотности связаны следующим соотношением:
Nэi= foi 2/81,
где Nэi - электронная плотность i-й области;
fоi - собственная частота ионизированной среды в i-й области.
Рабочую частоту увеличивают до момента прекращения отражения сигналов, а уменьшают до тех пор, пока дальность не перестанет изменяться, после чего проверяют соответствие достигнутой ионизации воздушной среды заданной величине протяженности ΔL контролируемого объема, и в случае отклонения изменяют регулированием мощности лазерного излучения, после чего повторяют работы по определению зависимости частоты отраженных сигналов от различных областей ионизированной среды до момента соответствия глубины ионизации заданной величине протяженности ΔL контролируемого объема. Для обеспечения ионизации воздушной среды в заданном объеме дополнительно изменяют параметры сканирования лазерного луча с помощью блока развертки 2.
Для обеспечения режима измерений дальности в зависимости от частоты отраженных сигналов от различных областей ионизированной среды контролируемого объема приемник 6 синхронно настраивают с изменением частоты передатчика 5, для чего применяют схему, в которой задающий каскад передатчика является одновременно гетеродином приемника, а сигналы с выхода приемника подают на вертикальные пластины электронно-лучевой трубки цифрового индикатора 8. На гасящие пластины трубки подают пилообразное напряжение развертки, пропорциональное времени. Для синхронизации работы генератора развертки 9 используют импульсы модулятора 7. В начале развертки находят изображение импульса передатчика, а изображение отраженного импульса будет отстоять на расстоянии, пропорциональном времени запаздывания t, тогда дальность отражения сигналов Li от i-го слоя будет определяться выражением:
Li= Vгp•t/2,
где Vгp - групповая скорость распространения электромагнитных волн:
где Еср - средняя величина диэлектрической проницаемости среды на трассе распространения электромагнитных волн, включая ионизированную среду контролируемого объема;
С - скорость света.
Далее при найденных и зафиксированных значениях дальности Li отраженные сигналы от i-ой области последовательно, начиная с ближней области на дальности L1, подают на электрический вход акусто-оптического модулятора света 14 (AOМ), работающем в режиме дифракции Брэгга, где они обрабатываются совместно со световыми сигналами, поступающими на его оптический вход. Интенсивность этих световых сигналов модулируют по амплитуде в амплитудном модуляторе 12 соответствующими зондирующими радиосигналами таким образом, что на выходе получают временные сигналы с постоянным средним уровнем, на которые накладываются радиосигналы в виде временной функции. Далее световые сигналы коллимируют в коллиматоре 13 и после прохождения через АОМ получают произведение изменяющегося во времени освещенности пучка на локальные составляющие отраженных радиосигналов. Два Фурье-объектива 15, 17 и пространственно-частотный фильтр 16 формируют в первом порядке дифракции изображение акустического поля в плоскости многоэлементного фотоприемного устройства 18, в качестве которого используют матрицу фотоприборов с зарядовой связью (ФПЗС), при этом размер элемента фотоприемного устройства выбирают из условия его согласования с размерами элемента разрешения по дальности в апертуре АОМ.
Выходные сигналы каждого элемента фотоприемного устройства интегрируются по времени в течение длительности зондирующих импульсов и соответствуют световой энергии распределенных зарядов, пропорциональной корреляционной функции отраженных и зондирующих радиосигналов, то есть:
где WΔT- световая энергия, соответствующая выходным сигналам;
U1i(t) - значения зондирующих радиосигналов;
U2i/(t-хNзв) - значения отраженных радиосигналов;
Vзв - скорость распространения акустического поля в звукопроводе АОМ;
Т - временная апертура АОМ;
k - коэффициент пропорциональности;
R1i2i(x/Nэв-T) значение корреляционной функции входных сигналов;
ΔT- время интегрирования фотоприемника.
Получаемые выходные сигналы, соответствующие накопленному зарядовому рельефу, преобразуют из аналоговой формы в цифровую с помощью аналого-цифрового преобразователя 19 (АЦП) и через согласующее устройство 20 подают в электронно- вычислительную машину 21, где производят процедуру последовательного считывания с запоминанием накопленного зарядового рельефа, а затем нормируют полученные таким образом значения корреляционной функции зондирующих и отраженных от каждой области сигналов.
После этого на каждом элементе дальности Li сравнивают эти значения с соответствующими нормированными значениями корреляционной функции зондирующих и отраженных сигналов при нахождении объектов К в контролируемом объеме и в случае нарушения соответствия этих значений определяют положение этих объектов по дальности, а также его продольные размеры по интервалу значений дальности, в пределах которого наблюдается указанное нарушение соответствия.
Благодаря изложенному способу определения объектов в контролируемом объеме воздушной среды вероятность обнаружения таких объектов повысилась в среднем на 15% и зависит при данной дальности от величины контролируемого объема, значения ЭПР объектов и их геометрических размеров, а также степени ионизации среды.
В заявляемом изобретении повышение вероятности обнаружения объектов достигается за счет совокупности признаков заявленного изобретения и дополнительно увеличения отношения сигнал-шум сравниваемых сигналов благодаря использованию соответствующих частотных свойств создаваемой ионизированной среды, а также статистической связи между зондирующими и отраженными радиосигналами от каждой области воздушной среды контролируемого объема по дальности при отсутствии объектов и их присутствии и, кроме того, увеличением времени интегрирования сигналов элементов фотоприемника путем последетекторного накопления в памяти ЭВМ.
Данное техническое решение опробовано в лабораторных условиях ВМА и может быть рекомендовано в прикладных областях, занимающихся контролем воздушной среды с помощью радиолокационных средств, а также при моделировании процессов, происходящих в ионизированных воздушных средах, облучаемых электромагнитными волнами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2485544C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ФАЗОВЫМ МЕТОДОМ ПРИ ИСПОЛЬЗОВАНИИ РАЗНОСТНО-ДАЛЬНОМЕРНОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2181898C2 |
| СПОСОБ ПОИСКА ОБЪЕКТА, УКЛОНЯЮЩЕГОСЯ ОТ ОБНАРУЖЕНИЯ | 2003 |
|
RU2262719C2 |
| ГИДРОАКУСТИЧЕСКИЙ МАЯК ДЛЯ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2235345C1 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР С ДЕМПФИРУЮЩИМ ЭЛЕМЕНТОМ | 1999 |
|
RU2173803C2 |
| ПУСКОВАЯ ТОПЛИВНАЯ СИСТЕМА КОРАБЕЛЬНЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2201516C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2204502C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 2001 |
|
RU2213677C2 |
| ГИДРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ МОДЕЛЬНЫХ ИСПЫТАНИЙ ПОДВОДНЫХ СНАРЯДОВ | 1995 |
|
RU2203469C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ УПРУГИХ МУФТ | 2001 |
|
RU2206880C2 |
Изобретение относится к группе радиоизмерений с использованием Фурье-оптики и может найти применение в системах контроля воздушной среды с помощью радиолокационных средств, а также при моделировании процессов, происходящих в ионизированных воздушных средах в присутствии различных неоднородностей, облучаемых электромагнитными волнами. Техническим результатом изобретения является повышение вероятности обнаружения воздушных целей в контролируемом объеме воздушной среды с помощью радиолокационных средств. Технический результат достигается тем, что перед обработкой радиосигналов воздушную среду контролируемого объема ионизируют для создания градиента концентрации (плотности заряженных частиц (электронов)) в направлении действия зондирующих импульсов, в результате чего в воздушной среде образуются области с разными электронными плотностями по глубине контролируемого объема, имеющие различные критические частоты, которые используют для определения положения этих областей по глубине (дальности) в пределах контролируемого объема. 1 ил.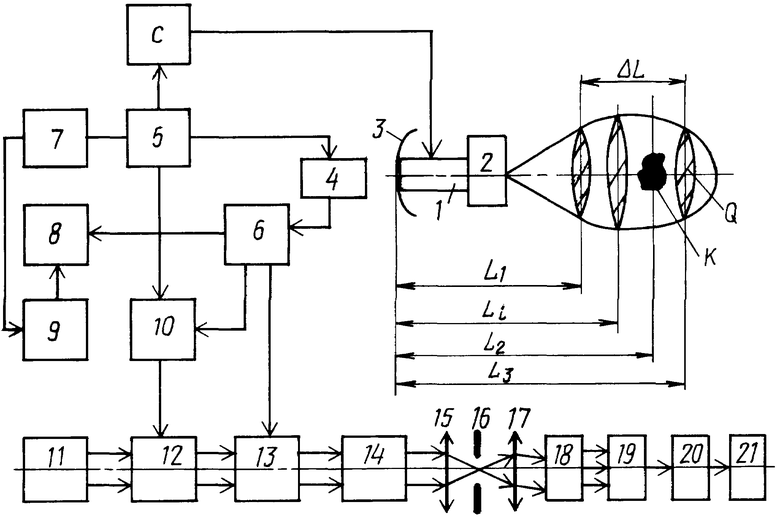
Способ обнаружения воздушных целей, включающий оптимальную преддекторную обработку принятых радиолокационных сигналов, отличающийся тем, что определяют зависимость частоты отраженных сигналов от различных областей воздушной среды от дальности расположения этих областей в пределах контролируемого объема и находят нормированные значения корреляционной функции зондирующих и отраженных сигналов при найденных значениях дальности, затем повторяют операции по нахождению нормированных значений корреляционной функции в присутствии воздушной цели в контролируемом объеме, сравнивают эти значения с соответствующими ранее определенными значениями корреляционной функции и принимают решение о наличии цели и определяют ее положение по дальности в пределах контролируемого объема, при этом воздушную среду ионизируют на время действия зондирующих сигналов и определяют зависимость частоты отраженных сигналов от дальности расположения этих областей в контролируемом объеме, причем зондирующие сигналы и ионизирующее излучение распространяются в одном направлении, а для обеспечения прохождения зондирующих сигналов по всей дальности контролируемого объема производят ионизацию его воздушной среды излучением в виде узкого лазерного пучка, сканирующим контролируемый объем одновременно в вертикальном и горизонтальном направлениях.
| БОГОРОДСКИЙ В.В., ОГАНЕСЯН А.Г | |||
| Проникающая радиолокация морских и пресноводных льдов с цифровой обработкой сигналов | |||
| - Л.: Гидрометеоиздат, 1987, с.40 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОННОЙ КОНЦЕНТРАЦИИ В ЗАДАННОЙ ОБЛАСТИ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018872C1 |
| US 5471211 A, 28.11.1995 | |||
| US 5287111 A, 15.02.1994. | |||

