Изобретение относится к области теории поиска объектов, в частности к способу определения местоположения объекта в некотором ограниченном районе на плоскости. Условия поиска предполагают, что объект имеет полную информацию о составе и характере действий сил поиска и имеет возможность уклониться от обнаружения, в том числе за пределы района.
В теории поиска объектов возможность объекта поиска уклониться от обнаружения и выйти из района поиска принято учитывать как фактор, ограничивающий поисковые усилия [1]. При этом считается, что эффективность поиска в результате воздействия данного ограничивающего фактора уменьшается, но предотвратить его невозможно. Поэтому поиск в данной ситуации производится традиционными способами (случайный поиск, поиск на параллельных галсах) [2], а эффективность поиска рассчитывается с учетом факторов, ограничивающих поисковые усилия.
Наиболее близким техническим решением является способ последовательного обзора водного пространства, заключающийся в движении наблюдателей от периферии района поиска к центру по спирали Архимеда [3]. При этом наблюдатели в момент начала обследования района равномерно размещаются по границе района, имеющего форму круга радиусом R0, а затем двигаются по траекториям архимедовых спиралей, имеющих центры в точке потери контакта (см. фиг.1), обеспечивая в полярных координатах (R, ϕ) уравнение движения из исходных точек по формуле

где t - время поиска;
a - коэффициент пропорциональности, определяемый выражением

где VS - радиальная скорость наблюдателей;
где RОВМЦ - радиус области возможного местонахождения цели;
n - количество наблюдателей;
VЦ - максимальная скорость цели;
VВ - поисковая скорость наблюдателей;
ω - угловая скорость перемещения наблюдателей вокруг точки потери контакта, определяется выражением
 .
.
Данному способу обследования водного пространства присущи следующие недостатки:
а) Данный способ предполагается использовать только для восстановления контакта с целью после его потери.
б) Анализ выражений (1)-(3) показывает, что величины VS и ω - соответственно радиальная и угловая скорости наблюдателей есть величины постоянные. Тогда время прохождения каждым наблюдателем участков спирали, ограниченных сектором ϕ (1...2А, 1А...2В, 1В...2С), должно быть одинаковым и равняться величине  (см. фиг.1). Поскольку скорость наблюдателей считается постоянной и равняется VB, а длина указанных дуг различна, реализовать данный способ возможно только за счет постепенного увеличения перекрытия зон обзора средств поиска или времени обзора в каждой точке. В обоих случаях результатом является неоправданный перерасход ресурса средств поиска и увеличение времени обследования района.
(см. фиг.1). Поскольку скорость наблюдателей считается постоянной и равняется VB, а длина указанных дуг различна, реализовать данный способ возможно только за счет постепенного увеличения перекрытия зон обзора средств поиска или времени обзора в каждой точке. В обоих случаях результатом является неоправданный перерасход ресурса средств поиска и увеличение времени обследования района.
в) Реализация данного способа возможна только при использовании средств цикличного поиска, предполагающем последовательный осмотр среды в фиксированных точках (т.е. в случае, когда при перемещении между точками обзора средства поиска не используются, например, опускаемая гидроакустическая станция).
Целью настоящего изобретения является повышение эффективности поиска подвижных объектов в условиях их противодействия путем уклонения от обнаружения. Начальные условия: в районе, имеющем форму круга радиусом R0, предполагается наличие объекта поиска (поскольку целью поиска [2] является обнаружение объекта или установление факта его отсутствия, предлагаемый способ поиска может использоваться независимо от того, обнаруживался объект поиска в заданном районе ранее или нет). Известно, что объект не заинтересован в обнаружении и будет противодействовать наблюдателям путем уклонения, в том числе и за пределы района поиска. Задача наблюдателей состоит в том, чтобы обнаружить объект в кратчайшее время. Характеристики объекта поиска (цели) и наблюдателя таковы:
- VЦ - максимальная скорость цели;
- dЦ - дальность обнаружения наблюдателя целью, причем dЦ≥R0, где R0 - радиус района поиска, т.е. во всех случаях цель имеет полную информацию о месте и характере действий наблюдателя;
- VH - поисковая скорость наблюдателя, VH>VЦ;
- dH - дальность обнаружения цели наблюдателем, dH<dЦ;
- n - количество наблюдателей.
Поставленная задача решается следующим образом. Наблюдатели в момент начала обследования района равномерно размещаются по кромке района на удалении R0 от его центра. Угловое расстояние между наблюдателями определяется величиной
Минимальное количество наблюдателей, необходимое для реализации данного способа, определяется выражением
где  - соотношение скоростей цели и наблюдателя, а максимальный радиус района, в котором гарантируется обнаружение цели данным способом, определяется выражением
- соотношение скоростей цели и наблюдателя, а максимальный радиус района, в котором гарантируется обнаружение цели данным способом, определяется выражением
Далее наблюдатели движутся со скоростью VH таким образом, чтобы угол между направлением вектора  и направлением на центр района составлял величину μi, определяемую выражением
и направлением на центр района составлял величину μi, определяемую выражением

где 
Ri - расстояние наблюдателя от центра района в некоторый момент времени ti.
Алгоритм вычисления элементов траектории наблюдателей может быть следующим:
1. Путь наблюдателя от исходной точки Ri=0=R0 до конечной точки поиска Ri=l=0 (при n≤2) или Ri=l=dHcos (при n>2) разбивается на l фиксированных отрезков длиной ΔR, величина l определяется требуемой точностью вычислений.
(при n>2) разбивается на l фиксированных отрезков длиной ΔR, величина l определяется требуемой точностью вычислений.
2. Для каждого значения Ri, где

вычисляется величина μi на основании выражения (7).
3. Время прохода наблюдателем каждого i-го отрезка траектории может быть найдено по формуле

а угловое расстояние - по формуле

Тогда координаты наблюдателя в полярной системе (Ri, φi) на момент времени ti, где


будут определяться выражениями (9) и (13).
Время Т полного обследования района радиусом R0 определяется выражением
или

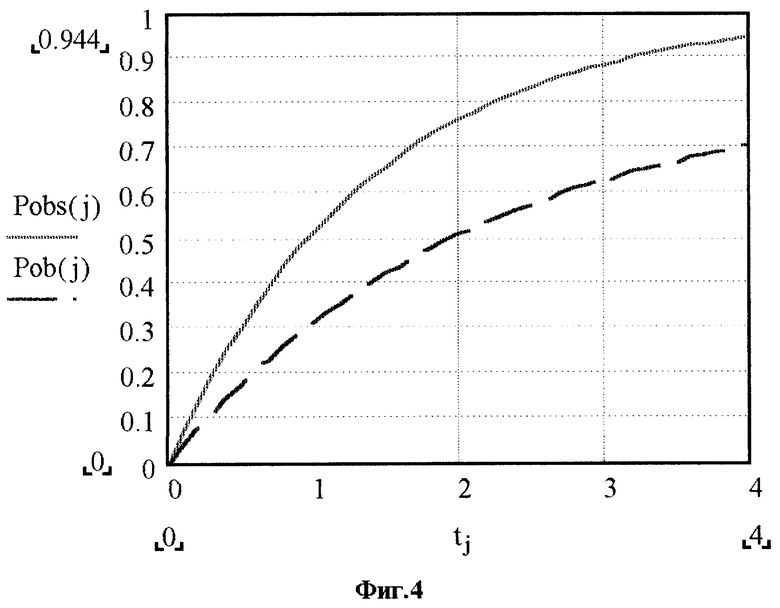
Поскольку поиск предлагаемым способом является поиском с возрастающей интенсивностью, вероятность обнаружения цели на любой момент времени поиска t, в соответствии с [I], может быть определена выражением

где  - интенсивность поиска с возрастающей интенсивностью.
- интенсивность поиска с возрастающей интенсивностью.
Сущность изобретения поясняется рисунками. На фиг.1 показан поиск способом последовательного обследования водного пространства по спирали Архимеда (прототип).
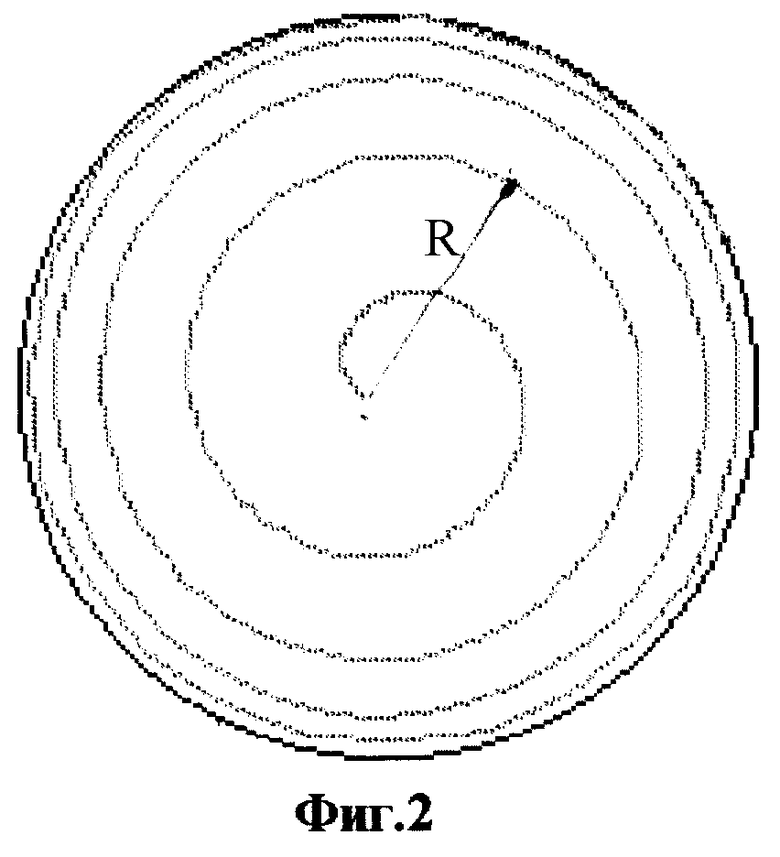
Фиг.2 - результат компьютерного моделирования траектории при поиске предлагаемым способом одиночным наблюдателем.
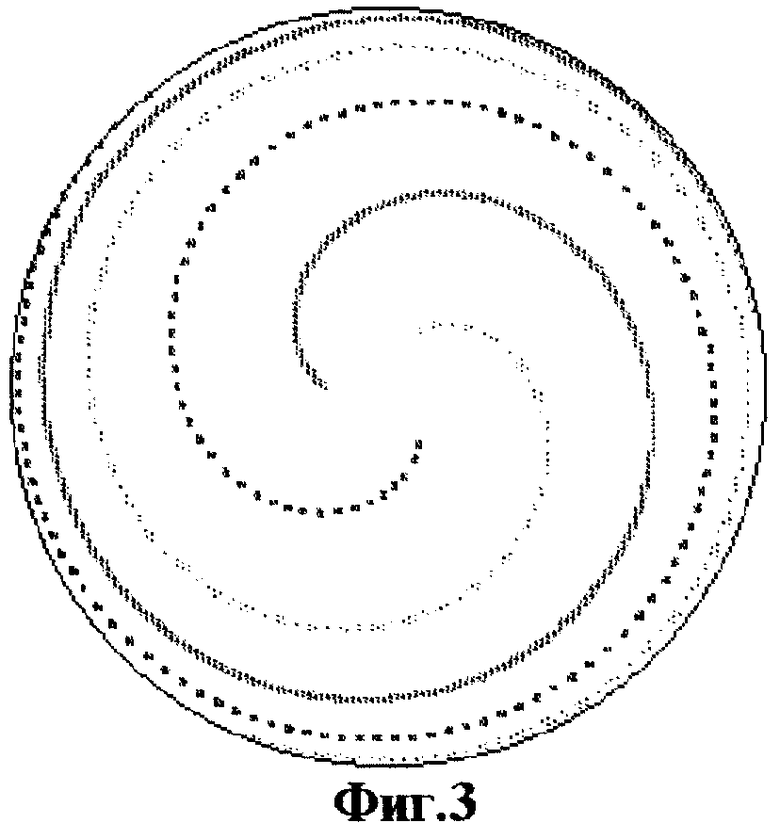
Фиг.3 - результат компьютерного моделирования траектории при поиске предлагаемым способом группой из трех наблюдателей.
Фиг.4 - график вероятности обнаружения цели при ее поиске предлагаемым способом - Pobs(j) и способом последовательного обследования водного пространства (прототип) - Pob(j).
Поиск уклоняющейся цели в соответствии с предложенным способом может быть реализован следующим образом. Наблюдатели занимают расчетные позиции и движутся по направлению к центру района, имея в качестве генерального курса спираль, параметры которой рассчитываются перед началом поиска. Поиск считается завершенным, если цель обнаружена или расстояние до центра района становится равным Rk.
Использование предложенного способа поиска обеспечивает по сравнению с прототипом следующие преимущества:
- возможность использования не только для восстановления контакта с целью, но и для первичного поиска;
- возможность использования средств не только цикличного, но и непрерывного поиска, например гидроакустическую или радиолокационную станцию непрерывного обзора;
- сокращение времени обследования района одинаковым нарядом сил в 1,4-2,2 раза при обеспечении одинаковой вероятности обнаружения;
- обследование района большей площади (в 1,2-1,4 раза) за одинаковое время при обеспечении равной вероятности обнаружения.
Данные преимущества получены за счет применения теоретико-игрового подхода к решению задачи оптимизации траектории наблюдателя при поиске уклоняющегося объекта средствами обнаружения непрерывного действия. Сравнение эффективности способов поиска производилось путем сравнительного анализа результатов математического моделирования с использованием программы MathCAD 2000 Professional.
Источники информации
1. Динер И.Я. Исследование операций. Л.: ВМА, 1969 г., - 604 с.
2. Абчук В.А., Суздаль В.Г. Поиск объектов. М: «Советское радио», 1977 г. - 333 с.
3. Чаусов Ф.С., Михайлов В.А. Способ последовательного обследования водного пространства при поиске уклоняющегося объекта (Материалы изобретения, патент №2184984). СПб: ВМА, 2002 г., - 33 с. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОГО ОБСЛЕДОВАНИЯ ВОДНОГО ПРОСТРАНСТВА ПРИ ПОИСКЕ УКЛОНЯЮЩЕГОСЯ ОБЪЕКТА | 1995 |
|
RU2184984C2 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| Способ определения количества точечных источников гамма-излучения в пределах обследуемого района | 2024 |
|
RU2832988C1 |
| СПОСОБ СЪЁМКИ ШЕЛЬФОВОЙ ПОВЕРХНОСТИ ДНА АКВАТОРИИ | 2019 |
|
RU2725106C1 |
| Способ обнаружения объектов на земной поверхности | 2021 |
|
RU2766924C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ ДНА АКВАТОРИИ | 2020 |
|
RU2733565C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ И СБЛИЖЕНИЯ СНАРЯДА С ЦЕЛЬЮ ПО НАБЛЮДАЕМЫМ ПАРАМЕТРАМ ИХ ТРАЕКТОРНОГО ДВИЖЕНИЯ | 2004 |
|
RU2267090C1 |
Изобретение относится к области теории поиска объекта, в частности к способу определения местоположения объекта в некотором ограниченном районе на плоскости. Технический результат заключается в повышении эффективности поиска подвижных объектов в условиях их противодействия. Способ заключается в том, что в момент начала обследования наблюдатели, равномерно размещенные по кромке района поиска на удалении R0 от его центра, движутся от периферии к центру района поиска по спирали, определяемой таким образом, чтобы угол между направлением вектора движения наблюдателей и направлением на центр района составлял величину μi, определяемую выражением

где
 - соотношение скоростей объекта и наблюдателей, n - количество наблюдателей, выбираемое из соотношения
- соотношение скоростей объекта и наблюдателей, n - количество наблюдателей, выбираемое из соотношения dн - дальность гарантированного обнаружения объекта наблюдателем, Ri - расстояние наблюдателей от центра района, i=0...l, l - номер отрезка, на которые разбивается путь по спирали от исходной точки поиска до центра района поиска, определяемый требуемой точностью вычислений. 4 ил.
dн - дальность гарантированного обнаружения объекта наблюдателем, Ri - расстояние наблюдателей от центра района, i=0...l, l - номер отрезка, на которые разбивается путь по спирали от исходной точки поиска до центра района поиска, определяемый требуемой точностью вычислений. 4 ил.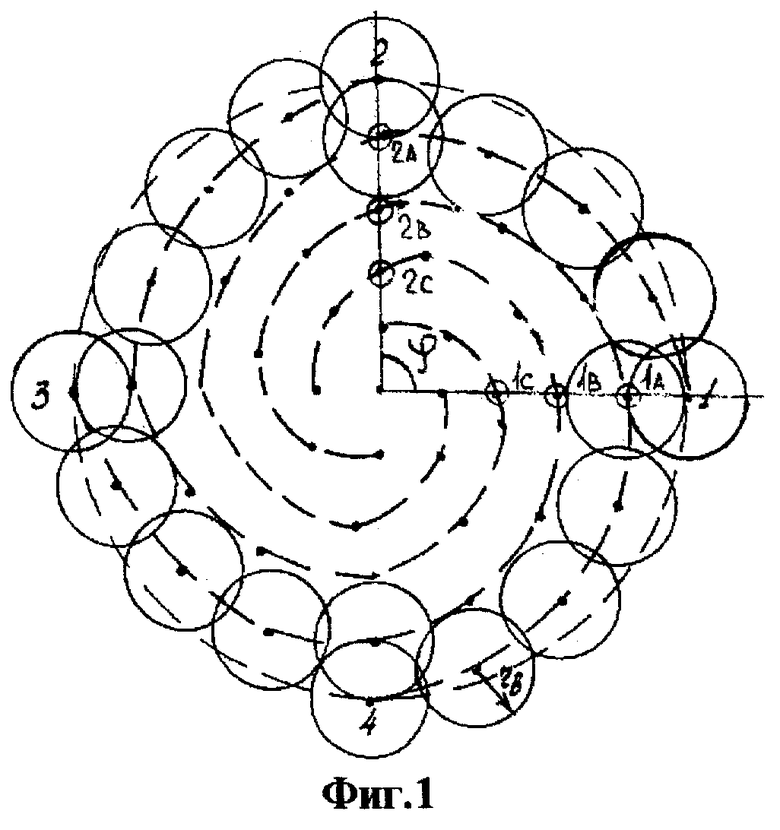
Способ поиска объекта, уклоняющегося от обнаружения, при котором в момент начала обследования наблюдатели, равномерно размещенные по кромке района поиска на удалении R0 от его центра, движутся от периферии к центру района поиска по спирали, определяемой таким образом, чтобы угол между направлением вектора движения наблюдателей и направлением на центр района составлял величину μi, определяемую выражением

где 
 - соотношение скоростей объекта и наблюдателей, n - количество наблюдателей, выбираемое из соотношения
- соотношение скоростей объекта и наблюдателей, n - количество наблюдателей, выбираемое из соотношения  dн - дальность гарантированного обнаружения объекта наблюдателем, Ri - расстояние наблюдателей от центра района, i=0...l, l - номер отрезка, на которые разбивается путь по спирали от исходной точки поиска до центра района поиска, определяемый требуемой точностью вычислений.
dн - дальность гарантированного обнаружения объекта наблюдателем, Ri - расстояние наблюдателей от центра района, i=0...l, l - номер отрезка, на которые разбивается путь по спирали от исходной точки поиска до центра района поиска, определяемый требуемой точностью вычислений.
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОГО ОБСЛЕДОВАНИЯ ВОДНОГО ПРОСТРАНСТВА ПРИ ПОИСКЕ УКЛОНЯЮЩЕГОСЯ ОБЪЕКТА | 1995 |
|
RU2184984C2 |
| АБЧУК В.А., СУЗДАЛЬ В.Г | |||
| Поиск объектов | |||
| - М.: Советское радио, 1977, с.248-257 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| US 5311187 A, 10.05.1994 | |||
| JP 2001338373, 07.12.2001. | |||

