Изобретение относится к области авиационной техники и предназначено для установки на летательные аппараты.
Известна система [1], позволяющая избежать столкновения самолетов, которая обеспечивает на каждом самолете, оснащенном соответствующим оборудованием, индикацию наличия на его курсе другого самолета с таким же оборудованием. С помощью ситемы устанавливаются вокруг этих самолетов зоны безопасности, а индикация позволяет каждому пилоту определять взаимное пересечение этих зон, полученных путем соответствующего расположения нескольких приемопередающих антенн на фюзеляже каждого самолета. Угол рассеяния и радиус действия каждой антенны определяет отдельную зону. Каждая антенна передает кодированный сигнал для индикации ситуации в своей зоне на данный самолет. Кроме того, каждая антенна обеспечивает прием кодированных сигналов, передаваемых с другого самолета. После дешифрации эти сигналы используются для индикации зоны самолета, которая затрагивает зону, определяемую приемной антенной данного самолета. Полученная информация выводится на индикаторное табло в кабине самолета для формирования сигналов, предупреждающих о возможном столкновении, тем самым осуществляется индикация относительного положения самолетов.
Однако данная система сложна и не обеспечивает необходимой точности и безопасности при проведении летных испытаний самолетов и бортового оборудования.
Известна автономная бортовая система предупреждения столкновений (СПС), основанная на использовании оборудования вторичной радиолокации [2]. Оборудование СПС включает блок обработки, приемоответчик адресного режима вторичной радиолокации (режима S), соответствующие антенны и средства выдачи рекомендаций. Оборудование СПС воздушного судна запрашивает приемоответчики вторичной радиолокации, находящиеся вблизи других воздушных судов и прослушивает их ответы, содержащие информацию об абсолютной высоте. Путем анализа полученных ответов оборудование СПС определяет воздушные суда, которые представляют потенциальную угрозу столкновения, и выдают летному экипажу рекомендации двух видов для предотвращения столкновения. Консультативная информация о воздушном движении (КИВД) указывает приблизительное местоположение воздушных судов-нарушителей, которые впоследствии могут явиться причиной выдачи рекомендации по разрешению угрозы столкновения (РРУС), предлагает маневры в вертикальной плоскости, которые по данным прогноза обеспечат увеличение или выдерживание интервала эшелонирования относительно представляющих угрозу воздушных судов.
Рекомендация КИВД указывает дальность, скорость изменения дальности, абсолютную высоту, скорость изменения абсолютной высоты и пеленг воздушного судна-нарушителя относительно собственного воздушного судна. Выдаваемые СПС КИВД предназначены для оказания содействия летному экипажу в осуществлении наблюдения за движением находящихся вблизи воздушных судов.
В том случае, когда логическая программа обнаружения угрозы в компьютере СПС устанавливает, что конфликтная ситуация с находящимся вблизи воздушным судном может привести к опасному сближению или столкновению, логическая программа разрешения угрозы столкновения определяет соответствующий маневр в вертикальной плоскости, который будет обеспечивать безопасное вертикальное эшелонирование воздушного судна с СПС. Выбранный маневр обеспечивает надлежащее вертикальное эшелонирование в пределах ограничений, налагаемых характеристиками скороподъемности и близостью к земле воздушного судна.
При обнаружении угрозы опасного сближения или столкновения оборудование СПС выдает рекомендации РРУС за некоторое время до момента наибольшего сближения воздушных судов, зависящее от защищенного объема воздушного пространства, выбранного для системы СПС. Номинальное для СПС время выдачи рекомендации по разрешению угрозы столкновения (РРУС) колеблется от 15 до 35 с до момента наибольшего сближения. Консультативная информация о воздушном движении (КИВД) номинально выдается за 5 и 20 с до выдачи РРУС.
Если воздушное судно-нарушитель не оборудовано СПС, а имеет лишь приемоответчик режима, его экипаж не будет знать о том, что он "отслеживается" воздушным судном с СПС. Если же оно оборудовано СПС, то по линии передачи данных режима S "воздух-воздух" выполняется процедура координации в целях обеспечения совместимости РРУС СПС, вырабатываемых на обоих воздушных судах.
СПС может поддерживать связь с наземными станциями, используя линию передачи данных режима S "воздух-земля". Это позволяет наземной станции режима S увязывать время предупреждения при выдаче рекомендации РРУС с местными условиями воздушного движения.
Требуемая номинальная дальность отслеживания траектории составляет для СПС 26 км, разрешающая способность при измерении дальности составляет 14,5 м, среднеквадратическая ошибка при измерении относительного пеленга не превышает 10o. Погрешность измерения высоты на каждом из конфликтующих судов не превышает 15 м на абсолютных высотах от уровня моря до эшелона полета 400.
В составе оборудования СПС для измерения пеленга используется направленная антенна, устанавливаемая сверху воздушного судна и имеющая ширину луча 90o. Снизу воздушного судна устанавливается ненаправленная антенна.
Вычислительные программы предупреждения столкновений СПС реализуются в циклическом режиме с номинальной частотой 1 Гц. В начале цикла используются сообщения наблюдения для обновления данных о траекториях всех нарушителей и новых траекториях. Затем каждый нарушитель характеризуется текущими оценками дальности, высоты и вертикальной скорости собственного воздушного судна.
После обновления траекторий с помощью алгоритмов обнаружения угрозы определяются те нарушители, которые представляют потенциальную угрозу столкновения. После этого алгоритмы разрушения угрозы выдают рекомендацию РРУС.
В СПС используются два типа индикаторов для предоставления летному экипажу консультативной информации. КИВД-индикатор обеспечивает экипажу круговой обзор воздушного движения вблизи собственного воздушного судна. РРУС-индикатор выдает летному экипажу информацию о маневрах, которые необходимо выполнить или избежать в вертикальной плоскости.
Для предупреждения летного экипажа о выдаче рекомендаций КИВД или РРУС используется звуковая и речевая сигнализация.
Анализ технических и тактических характеристик СПС показывает на непригодность обеспечения безопасного проведения летных исследований (ЛИ) работы двух ЛА, предусматривающих сближение ЛА до десятка метров.
Недостатком системы является малая точность измерения параметров пространственного положения ЛА в связанных системах отсчета (получаемых косвенными измерениями), что определяет невысокий уровень безопасности при проведении ЛИ группового полета.
Режим полета в "паре" является наиболее опасным. Полеты ЛА в группе используются при проведении исследований по аэродинамике, при показательных демонстрациях авиационной техники и др. Дополнительные усложнения имеют место по мере повышения интенсивности возмущающих воздействий на оба ЛА.
Безопасность полетов обеспечивается рядом мер, таких как специальная тренировка экипажей для обеспечения "слетанности", ограничителями по дистанции допустимого сближения ЛА и др.
Полет самолетов в группе обладает рядом особенностей: присутствие другого самолета в малом объеме пространства, малые расстояния между самолетами, необходимость стабилизации параметров полета в группе. Заданные в летных исследованиях расстояния между ЛА при полете в группе определяются тактико-техническими характеристиками самолета, условиями проведения эксперимента и требованиями безопасности полета, точностью функционирования бортовых систем, что предопределяет повышенную опасность столкновения. Поэтому назначение СПС при полете в группе - констатировать опасное сближение ЛА и определить оптимальный маневр уклонения от столкновений.
Изобретение направлено на повышение точности и безопасности полета за счет представления параметров относительного взаимного пространственного положения и движения двух ЛА.
Сущность изобретения состоит в том, что в систему предупреждения столкновения летательных аппаратов при летных испытаниях, содержащую систему измерений высотно-скоростных сигналов, связанную с ней через адаптер ввода данных с центральным вычислителем (ЦВ), включающим связанные с адаптером вывода данных ЦВ блоки вычислителя расстояния между летательными аппаратами (ЛА), относительной скорости, вычислителя зоны опасного сближения, с входами, подключенными к выходам вычислителя расстояния между ЛА и вычислителя относительной скорости, систему отображения информации и сигнализации, систему автоматического управления (СAУ) с рулевыми приводами, автомат тяги, и установленную на каждом ЛА, в ее состав введены спутниковая навигационная система с бортовым контроллером, инерциальная навигационная система, аппаратура межсамолетного обмена, соединенные через адаптер ввода данных с центральным вычислителем, в состав которого введены блок вводa констант, связанный с ним входами блок вычислителя предварительной обработки данных, связанный выходами с блоками вычислителей действительных координат, зоны опасного сближения, относительной скорости, вычислителем преобразования координат и выходом вычислителя предварительной обработки данных, вычислитель действительных координат, вычислитель параметров взаимного положения, первой и второй выходы которого связаны с вычислителем расстояния между ЛА, с адаптером вывода данных, а вход - с вычислителем преобразования координат, в ЦВ введен блок вычислителя единого временного фронта, подключенный выходами к адаптеру ввода данных и вычислителю действительных координат, вход связан с первым входом блока вычислителя предварительной обработки данных, блок ввода констант первым выходом соединен с вычислителем предварительной обработки данных, второй выход соединен с вычислителем зоны опасного сближения, при этом первый выход вычислителя параметров взаимного положения ЛА связан с входом вычислителя расстояния между ЛА, второй выход связан с адаптером вывода данных ЦВ, вход блока формирования изображений связан с выходом адаптера вывода данных ЦВ, a выход - со входом системы отображения информации, выход адаптера вывода связан с автоматом тяги, САУ рулевых приводов ЛА, аппаратура межсамолетного обмена информацией о параметрах пространственного положения ЛА связана с адаптером ввода данных и адаптером вывода данных ЦВ и радиотехнически связана с ответной частью той же аппаратуры ведомого ЛА, второй вход САУ связан с выходом инерциальной навигационной системы, в систему введены неземная контрольно-корректирующая станция, пункт управления летным экспериментом, при этом бортовой связной контроллер радиотехнически связан с контрольно-корректирующей станцией, пункт управления летным экспериментом радиотехнически связан с аппаратурой межсамолетного обмена.
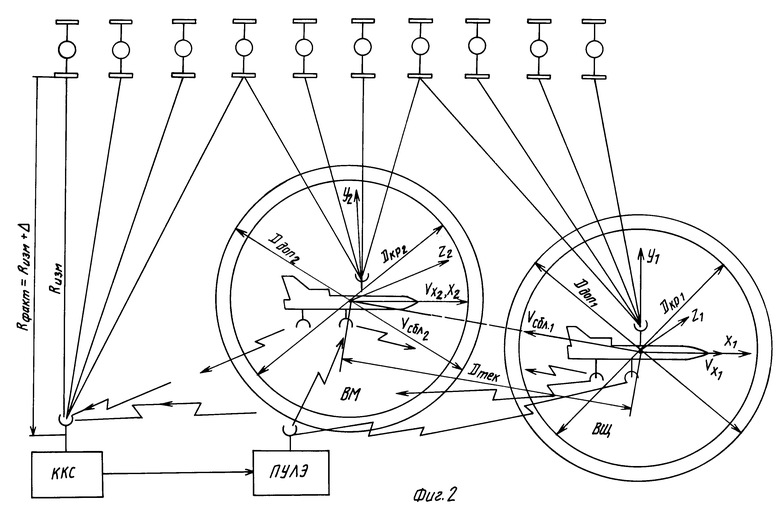
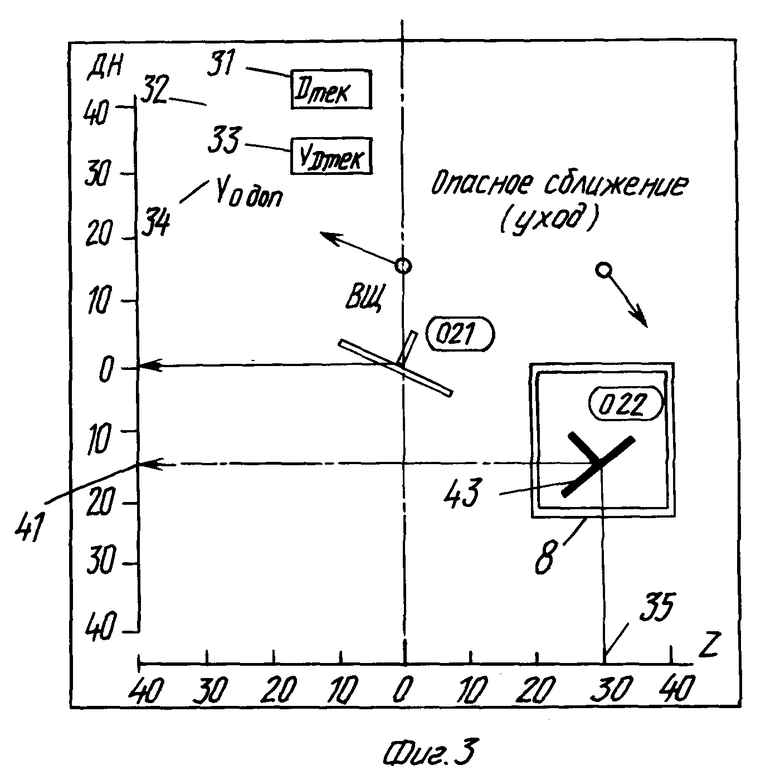
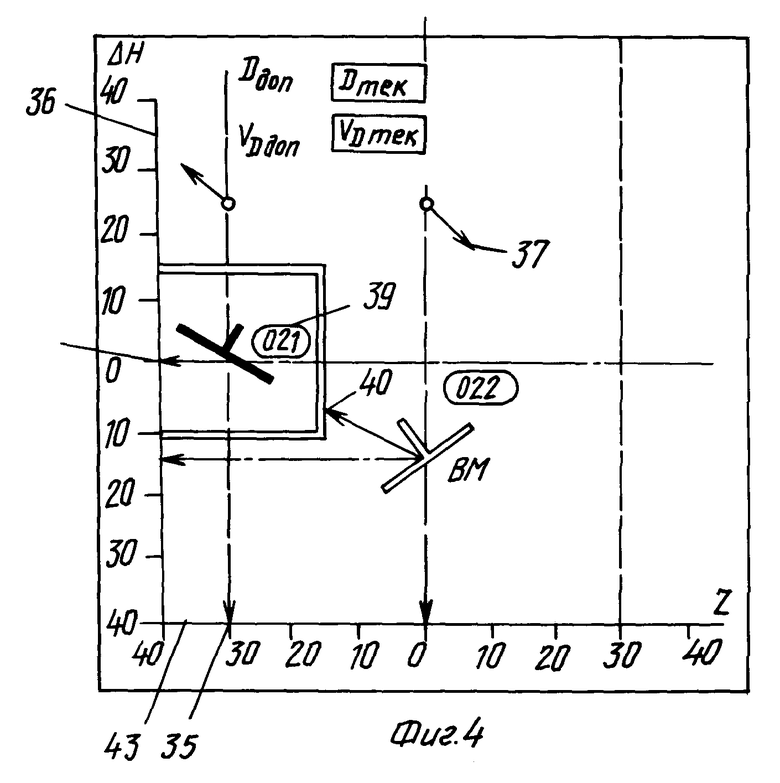
На фиг. 1 представлена блок-схема системы предупреждения столкновений ЛА при летных испытаниях. На фиг. 2 изображены кинематические и геометрические соотношения при групповом полете ведущего и ведомого ЛА. На фиг. 3, 4 - изображение индикаторов зон опасного сближения на ведущем и ведомом ЛА.
На фиг. 1 изображены:
1 - ведущий (ВЩ) летательный аппарат (ЛА),
2 - глобальная спутниковая навигационная система типа ГЛОНАСС, GPS (космическая часть),
3 - ведомый (ВМ) ЛА,
4 - контрольно-корректирующая станция (ККС) для работы СНС в дифференциальном режиме,
5 - пункт управления летным экспериментом (ПУЛЭ),
6 - инерциальная навигационная система (ИНС),
7 - система высотно-скоростных сигналов (СВС),
8 - спутниковая навигационная система (СНС) - бортовая часть,
9 - связной контроллер СНС,
10 - адаптер ввода данных в центральный вычислитель,
11 - аппаратура межсамолетного обмена (АМО) - телекодовая линия передачи сигналов управления,
12 - центральный вычислитель (ЦВ),
13 - вычислитель единого временного фронта (ВЕВФ),
14 - вычислитель предварительной обработки данных (ВПОД),
15 - блок ввода констант,
16 - диспетчер ЦВ,
17 - вычислитель преобразования координат (ВПК),
18 - вычислитель действительных координат (ВДК - комплексной обработки информации (КОИ),
19 - вычислитель параметров пространственного взаимного положения (ВППВП), вычислитель относительного положения ЛА (ВОП),
20 - вычислитель расстояния между ЛА (ВРМЛА),
21 - блок формирования изображений (БФИ),
22 - вычислитель зоны опасного сближения (ВЗОС),
23 - вычислитель относительной скорости (ВОС),
24 - адаптер вывода данных из ЦВ,
25 - система отображения информации (СОИ),
26 - система сигнализации,
27 - система регистрации данных,
28 - автомат тяги (АТ),
29 - система автоматического управления (САУ),
30 - органы управления, связанные с рулевыми приводами САУ.
На фиг. 2 изображены кинематические соотношения при полете ЛА в группе, взаимодействие двух ЛА с СПС, ККС и ПУЛЭ.
На фиг. 3, 4 изображены лицевые части информационного поля индикаторов СОИ (индексы и метки), где:
31 - счетчик допустимой дистанции сближения,
32 - счетчик дистанций сближения,
33 - счетчик допустимой скорости сближения,
34 - счетчик скорости сближения,
35 - индекс бокового смещения,
36 - шкала превышения,
37 - команды на "уход" при опасном сближении,
38 - зона опасного сближения (ЗОС),
39 - идентификаторы ЛА (номера позывных),
40 - вектор изменения скорости сближения,
41 - индекс превышения,
42 - силуэт ЛА,
43 - шкала бокового смещения.
Система предупреждения столкновения (СПС) ведущего ЛА 1 в групповом полете связана с космической частью - навигационными спутниками 2, СПС ведомого самолета 3, и наземной частью - контрольно-корректирующей станцией ККС-4 и соединенной с пунктом управления летным экспериментом ПУЛЭ-5. В бортовой части СПС ведущего ЛА 1 ИНС 6, СВС 7, СНС 8 соединены через адаптер ввода 10 с вычислителем предварительной обработки данных 14, блоком ввода констант 15 центрального вычислителя 12, а выход его через адаптер вывода данных 24 соединен с СОИ 25, системой сигнализации - 26, с САУ 29, входы которой связаны с ИНС 6, а выходы с рулевыми приводами органов управления 30. Кроме того, адаптер вывода данных 24 соединен с автоматом тяги 28 и системой регистрации данных 27. Выход диспетчера 16 центрального вычислителя 12 связан со всеми вычислителями и блоками, входящими в его состав. Вычислитель предварительной обработки данных 14 связан с адаптером ввода 10, а выход его связан с вычислителем единого временного фронта (ВЕВФ) 13, вычислителем действительных координат (ВДК) 18, блоком ввода констант 15, выход которого связан с вычислителем зоны опасного сближения (ВЗОС) 22, и вычислителем предварительной обработки данных ввода (ВПОД) 14, выход вычислителя (ВЕВФ) 13 связан с адаптером ввода - 10 и вычислителем ВДК 18, вход вычислителя преобразования координат (ВПК) 17 связан с вычислителем ВДК 18, а выход связан с вычислителем относительного положения (ВОП) ЛА 19, второй выход вычислителя ВДК 18 связан с вычислителем ВЗОС 22, а третий выход его соединен с вычислителем относительных скоростей (ВОС) 23, выход вычислителя ВОП 19 связан с вычислителем расстояния между ЛА (ВРМЛА) 20, второй его вход связан с адаптером вывода 24. Первый вход вычислителя (ВРМЛА) 20 связан с вычислителем ВЗОС- 22, а второй - с адаптером вывода 24, вход блока формирования изображений (БФИ) 21 связан с выходом адаптера вывода 24, а выход - со входом СОИ 25, третий вход вычислителя ВЗОС 22 связан с вычислителем ВОС 23, а выход вычислителя ВЗОС 22 связан с адаптером вывода 24, второй выход вычислителя ВОС 23 связан с адаптером вывода 24, выход адаптера вывода 24 связан с автоматом тяги 28, САУ 29 с органами управления рулевых приводов 30, системой сигнализации 26 и системой регистрации данных (СРД) 27. Аппаратура межсамолетного обмена информацией (АМОИ) о параметрах пространственного положения ЛА связана с адаптером ввода 10 и адаптером вывода данных 24 и радиотехнически связана с ответной частью той же аппаратуры АМОИ ведомого ЛА 3 и ПУЛЭ 5, связной контроллер 9 соединен с бортовой частью СНС 8, а радиотехнически - с таким же подобным контроллером ведомого ЛА 3.
Определение взаимного положения ЛА сводится к определению расстояния между двумя ЛА по информации от спутниковой навигационной системы и инерционной системы с помощью алгоритмов комплексной обработки информации, реализуемой в центральном вычислителе СПС.
Для решения этой задачи в структуре построения СПС, предусматриваются:
- центральный вычислитель 12,
- инерциальная навигационная система 6 (например, типа И-21, LTN - 92),
- приемоиндикатор СНС 8 (например, типа TNL-2000A),
- система воздушных сигналов СВС-7 (например, СВС-85).
При этом в центральный вычислитель, через адаптеры, поступает следующая информация:
От СНС-8:
- географические координаты ϕ, λ,
- составляющие скоростей VN, VE, VY,
- геометрическая высота Hг,
- текущее время Ттек..
От ИНС-6:
- географические координаты ϕ, λ,
- истинный курс ИК,
- составляющие скоростей V1, V2,
- текущее время Ттек..
От СВС-7:
- истинная скорость Vист.
Кроме определения текущего местоположения ЛА в вычислителе с использованием данной информации вычисляются текущие значения следующих параметров:
- дистанция сближения в горизонтальной плоскости Дтек;
- скорость сближения двух ЛА - Vdrтек;
- превышение одного ЛА над другим - Hтек.;
- боковое уклонение одного ЛА по отношению к другому - Zтек.
Для формирования ограничений по этим параметрам с пульта вычислителя предусмотрен ввод в вычислитель допустимых значений этих параметров (Ддоп., Vдоп., Hдоп., Zдоп.), которые могут меняться в зависимости от целей выполняемого полета. Кроме того, с пульта необходимо предусмотреть ввод номера ЛА или его позывного (N, позывной).
Обмен информацией между двумя ЛА осуществляется по следующим параметрам:
- географическим координатам ϕ1, λ1, ϕ2, λ2,
- составляющим скоростей VN, VE, VY, от СНС,
- высоте,
- относительной скорости сближения,
- времени Т.
Все эти параметры из центрального вычислителя 12 передаются с одного борта на другой. Для этого в структурной схеме предусмотрена аппаратура передачи этой информации по каналу радиосвязи 11.
Выдача информации о взаимном положении ведущего и ведомого ЛА на ПУЛЭ осуществляется передачей по каналу радиосвязи из центральных вычислителей ИСПС обоих ЛА следующей информации:
- координат (в прямоугольной системе координат);
- высоты;
- курса.
На ПУЛЭ 5 аналогично СОИ 25 формируется зона опасного сближения двух ЛА.
При опасном сближении ЛА, из центрального вычислителя - 12 ИСПС в систему звуковой сигнализации выдаются:
- "опасное сближение" (речевое сообщение) как предупреждающий сигнал,
- "уход" (звуковое и речевое сообщение).
Связь центрального вычислителя ЦВ 12 с системой звуковой (речевой) сигнализации 26 осуществляется через адаптеры 24.
Для отображении текущего местоположения ЛА на СОИ 25 из центрального вычислителя выдаются текущие и допустимые значения:
- дистанции сближения двух ЛА - Дтек., Ддоп.,
- скорости сближения двух ЛА - Vdrтек., Vdrдоп.,
- превышение одного ЛА над другим Hтек., Hдоп.,
- боковое смещение одного ЛА относительно другого в текущий момент времени (Zтек., Zдоп.).
На СОИ 25 по информации, полученной от вычислителя, рисуется зона опасного сближения, которая меняет окраску в зависимости от сигнализации "опасное сближение" или "уход".
Центральный вычислитель предназначен для обработки информации с целью получения заданных точностных характеристик по определению взаимного положения двух ЛА 1 и ЛА 3.
Наличие ЦВ 12 позволяет организовать комплексную обработку избыточной информации (КОИ), поступающей в него от СНС, ИНС, СВС, при которой возможно получить точностные характеристики более высокие, чем каждого средства определения параметров в отдельности.
В центральном вычислителе 12 информация от СНС принимается через последовательный порт в формате RS-232. Информация СНС -8 (ϕ, λ, VN, VE, VY, T, Hг) поступает в символьном виде.
Информация ИНС-6 (ϕ, λ, ИК, V1, V2), СВС 7 (Vист..) в ЦВ 12 принимается в формате ARINC-429 с помощью адаптера ввода 10 информации.
В системе СПС между ЦВ 12 ведущего ЛА 1 и ЦВ ведомого ЛА-3 через аппаратуру межсамолетного обмена 11 предусмотрен обмен информацией по координатам ϕ, λ, составляющиx скоростей VN, VE, VY, высоте H и текущему времени Т. По этой информации в центральных вычислителях обоих ЛА вычисляются:
дистанция сближения в горизонтальной плоскости - Дтек.;
скорость сближения двух ЛА - Vдтек.;
превышение одного ЛА над другим - Δ Hтек.;
боковое уклонение одного ЛА по отношению к другому - Zтек.
В ЦВ 12 предусмотрен ввод с пульта вычислителя допустимых значений вышеперечисленных параметров Ддоп., Zдоп., Hдоп., Vдоп., которые в зависимости от целей выполняемого полета (сопровождение 1-го вылета, определение погрешностей приемников воздушного давления (ПВД) и т.д.) могут носить переменные значения, и порогов срабатывания этих параметров, которые также являются переменными величинами и могут быть, к примеру, функцией от скорости сближения.
Центральный вычислитель 12 дает информацию в систему звуковой сигнализации на срабатывание сигнализации "опасное сближение" и "уход", а также бортовую систему регистрации например, типа МСРП, параметры взаимного определения положения двух ЛА - 1 и 3 Дтек. - Vдтек, Hтек., Zтек..
Порты ввода-вывода - блоки 10 и 24 (модули), задачей которых является осуществление взаимодействия между ЦВ 12 и внешними коммуникациями.
Порты - это места (точки) непосредственного контакта ЦВ - 12 и внешними устройствами, а также средства подключения внешних устройств к ЦВ - это элемент интерфейса. Порт ввода - 10 - это источник данных, адресуемый регистр, подключенный к шинам ЦВ 12. Он выдает слово в микропроцессор, когда к нему осуществляется обращение. Порт вывода 24 - приемник данных, адресуемый регистр, подключенный к шинам ЦВ 12. Он получает слово от микропроцессора, когда последний обращается к нему. Это адресуемые одно- или двунаправленные буферные регистры, предназначенные для построения программного интерфейса. Каждый порт является составной частью интерфейса между ЦВ 12 и датчиком, контроллером.
Адаптер 10 ввода данных обеспечивает одновременный прием на ЦВ - 12 разнородной асинхронной информации в полном объеме (от каждого источника) с точностью временной привязки принимаемых параметров не хуже 0,001 с. Временная привязка, наряду с априорными данными (например, преобразование, транспортное запаздывание), необходима для дальнейшей синхронизации информации и приведения ее к шкале единого времени.
Адаптер 10 связи ЦВ 12 с бортовым оборудованием обеспечивает ввод информации прежде всего с бортовых цифровых систем, осуществляющих обмен по ГОСТ-18977-79.
Адаптер 10 связи с системой регистрации 27 параметрической информации обеспечивает вывод одной линии ARINC-717.
Адаптер связи ЦВ - 12 с СНС-8 обеспечивает ввод одного информационного потока по стандарту RS-232.
Диспетчер - 16 осуществляет две основные функции:
- распределяет процессорное время ЦВ - 12 между вычислителями;
- производит обмен данными между отдельными вычислителями и блоками.
При распределении процессорного времени модулям присваиваются приоритеты. Наивысший приоритет имеют модули приема информации от датчиков своего и соседнего самолета. Управление им передается диспетчером 16 сразу при поступлении информации. При передаче управления используется аппарат системных прерываний. Вычислители, производящие вычислительные операции и обработку входного потока информации, функционируют в определенной последовательности, которая заложена в "диспетчере".
Вся последовательность вычислений выполняется с частотой, заданной оператором, и включает в себя:
- получение физических значений параметров;
- отбраковку информации;
- приведение данных к единому временному фронту;
- комплексную обработку информации;
- преобразование координат в земную систему;
- определение расстояния между самолетами, составляющих вектора относительной скорости;
- перечeт координат соседнего самолета и его вектора скорости в систему координат, связанную с самолетом;
- запись информации на диск;
- выдачу информации на дисплей;
- выдачу информации на СОИ 25 и в аппаратуру для передачи на соседний самолет.
Взаимодействие ЦВ-12 с датчиками и потребителями обеспечивается по каналам последовательного кода и каналам межмашинного обмена. ЦВ -12 решает задачи приема информации от датчиков, обработки и анализа информации, формирования выходных данных, в нем реализованы также сервисные программы обеспечения режимов работы.
На обработку в ЦВ 12 поступает информация от ИНС 6, СВС 7 и соседнего самолета. Информация от ИНС 6 принимается в формате ARINC-429 с помощью адаптера 10 ввода информации. Адаптер 10 обеспечивает ввод 32 информационных потоков с суммарной информативностью до 30000 слов ARINC-429 в секунду и доступным адресным пространством до 256 адресов в каждом потоке. Точность привязки по времени момента ввода слова обуславливается разрешающей способностью таймера (1,28 мс), расположенного на адаптере ввода информации.
Ввод информации в ЦВ 12 от СНС 8 происходит через последовательный порт в формате RS-232.
В вычислителе ВПОД 4 происходит "распаковывание" информации, полученной в формате RS-232 и преобразование кодов параметров в формате ARINC-429 в их физические значения. В формате RS-232 принимаются пакеты из последовательности символов. Символы, расположенные на определенных местах в последовательности, операторами языка программирования преобразуются во внутреннее машинное представление вещественного числа. Из кодовых слов в формате ARINC-429 извлекаются соответствующие двойные разряды и полученное значение умножается на масштабный множитель. В ВПОД -14 происходит анализ готовности системы отбраковки сбойных значений параметров. Прежде всего анализируются кодовые параметры и определяется готовность систем. При наличии готовности значение каждого параметра, поступающего на обработку, подвергается двум видам контроля:
- контроль по принадлежности заданному интервалу значений;
- контроль по величине приращения параметра.
Для каждого параметра задаются интервал допустимых значений и максимальная скорость изменения параметра. Для вычисления скорости изменения параметра используются данные о величине последнего несбойного значения данного параметра и соответствующего ему момента времени. Если хотя бы один контроль дает отрицательный результат, то значение параметра заменяется на последнее несбойное значение данного параметра.
В вычислителе ВПОД -14 осуществляется контроль измерений для защиты фильтра Калмана от сбоев информации. Контроль состоит в том, что на фильтр Калмана проходят лишь те измерения, которые удовлетворяют условию: , (1)
, (1)
где Дi - задаваемые допуски,
Zi - компоненты вектора измерения, априорные оценки соответствующих величин, получаемые с помощью алгоритма калмановской фильтрации.
априорные оценки соответствующих величин, получаемые с помощью алгоритма калмановской фильтрации.
Для контроля сбоев информации инерциальных навигационных систем формируется массив данных из 16 последовательных записей (кадров).
Контроль сбойности осуществляется путем сопоставлений значений сигналов ИНС с предельными величинами и приращений значений сигналов с допустимыми величинами, определяемыми динамическими характеристиками объекта.
Восстановление сбойной информации осуществляется путем аппроксимации бессбойных значений соответствующих параметров полиномами первой степени.
Массив информации из 16 записей (кадров) полностью отбраковываeтся, если количество записей (кадров) со сбойной информацией превышает 25%.
Контроль сбойности информации СНС осуществляется путем сопоставления значений сигналов СНС с предельными величинами, определяемыми динамическими характеристиками объекта. В результате вырабатываются 2 признака достоверности информации СНС по координатам и скоростям.
Значения параметров от различных систем вычисляются и вводятся в ЭВМ в различные моменты времени. В ВЕВО 13 при вводе информации в ЭВМ фиксируются показания системного таймера ЭВМ, обновление показаний которых происходит через каждые 1,28 мс. В пакете информации от СНС 8 содержится информация о Гринвичском времени момента начала передачи пакета, что позволяет преобразовать показания системного таймера ЭВМ в Гринвичское время, к которому относятся координаты и скорости.
Приведение значения каждого параметра к текущему моменту времени Ттек. производится с помощью линейной интерполяции с использованием двух последних значений данного параметра и соответствующих им моментов времени.
Если в кадре информации содержатся координаты и скорости изменения координат, относящиеся к единому моменту времени Т, то значения координат приводятся к моменту Ттек. по формуле:
где X1 - значение координат в момент времени; значение скорости изменения координаты X в момент времени T1 ;
значение скорости изменения координаты X в момент времени T1 ;
Xтек. - вычисляемое значение координаты на момент времени Ттек..
В результате работы блока значения всех параметров приводятся к единому времени Ттек. Полученные значения параметров далее подаются на вход вычислителя комплексной обработки информации. В вычислителе ВДК 18 решаются следующие задачи:
- анализ точностных характеристик ИНС;
- формирование эталонных значений координат, составляющих скорости, истинного курса ЛА.
Для этого используется комплексная обработка информации (КОИ) в вычислителе ВДК 18, результатом которой являются действительные значения параметров движения ЛА. Действительные значения параметров используются для вычисления погрешностей систем. Если X - значение одного из параметров какой-либо оцениваемой характеристики ЛА, а Xдейст. - действительное полученное значение соответствующего параметра, то погрешность данной системы или характеристики ЛА определяется по формуле:
Алгоритм калмановской фильтрации обеспечивает наилучшие линейные оценки вектора состояния системы Xк в момент времени tk, когда Xк определяется из уравнения состояния
Xk-1 = Фk+1, k Xk + qk, (4)
а вектор измерения Zк представляется в виде
Zk = Hk + rk. (5)
Здесь qk, Zk - независимые шумы с нулевыми средними значениями и матрицами ковариаций:
Cov[qk] = Q, Cov[rk] = rk .(6)
Фk+1, k - фундаментальная матрица, Hk - матрица измерений.
Алгоритм состоит из двух этапов и имеет следующий вид:
- оценка вектора состояния между измерениями дается уравнением:
Xk/k-1 = Фk/k-1 Xk-1/k-1(7)
- оценка при измерении следующими уравнениями:
Kk = Pk/k-1 Hk(Hk Pk/k-1 Hk+Rk)-1
Pk/k-1 = Фk/k-1 Pk-1/k-1 Фk/k-1+Qk (8)
Pk/k = Pk/k-1 - Kk Hk Pk/k-1
где  априорная и апостериорная оценки вектора cостояния X на К-м шаге;
априорная и апостериорная оценки вектора cостояния X на К-м шаге;
Pk/k-1, Pk/k - априорная и апостериорная ковариационные матрицы на К-м шаге;
Kk - весовая матрица.
Для преодоления численных трудностей, связанных с возможной потерей свойств симметрии и положительной определенности матрицы Pk/k, и повышения точности оценок используется метод квадратного корня из матрицы (МККМ), основанный на представлении ковариационной матрицы P в виде
P = SST, (9)
где S - верхне- или нижнетреугольная квадратная матрица.
Анализ характеристик ИНС производится с помощью алгоритма оптимальной обработки информации Калмана, позволяющего разделить суммарные ошибки на составляющие и оценить инструментальные погрешности ИНС.
С помощью фильтра Калмана осуществляется оценивание до 16 параметров, в число которых входят погрешности ИНС в определении координат, составляющие скорости, курса, погрешности построения вертикали, постоянные составляющие дрейфов гироскопов ИНС, дрейфы, зависящие от ускорений (в случае платформенных ИНС) или дрейфы, пропорциональные измеряемому сигналу (в случае БИНС), масштабные коэффициенты погрешностей акселерометров ИНС.
Формирование эталонных пилотажно-навигационных параметров (координат, скорости, курса) осуществляется путем исключения из значений существующих параметров, определяемых ИНС, оценок ее погрешностей, полученных в результате КОИ.
При реализации алгоритма калмановской фильтрации в программе используется известная форма защиты от вычислительной неустойчивости - МККМ, в котором ковариационная матрица не вычисляется в явном виде, а представляется в виде произведения сомножителей, которые экстраполируются и корректируются.
В вычислителе ВПК - 17 реализуются вычисления кинематических параметров.
Проектирование составляющих скоростей ИС на оси платформы
Вычисление радиусов кривизны по направлению осей платформы и по осям географической системы координат
где e2 = 0,0066934 - квадрат первого эксцентриситета,
a - большая полуось земного эллипсоида.
Вычисление проекций угловой скорости вращения Земли на оси платформы
где U - угловая скорость вращения Земли.
Вычисление проекций абсолютной угловой скорости на оси гироплатформы
Uz для полусвободной в азимуте платформы,
Uz=0 для свободной в азимуте платформы.
Вычисление проекций абсолютного линейного ускорения на оси гироплатформы

где β = 0,005317; g0 = 9,78049;
a'z - кажущееся вертикальное ускорение: получается на выходе алгоритма.
Вектор измерений включает в себя следующие компоненты:
1) погрешности ИНС в определении координат, вычисленные следующим образом:
где Δϕ, Δλ - погрешности ИНС в определении географических координат:
здесь M, N - радиусы кривизны по осям географической системы координат:
M = (a+H)(1-e2)/(1-e2sin2ϕинс), (17)
N = (a+H)/(1-e2sin2ϕинс), (18)
ϕинс, λинс - - географические координаты по информации ИНС,
ϕснс, λснс - - географические координаты от СНС.
2) погрешности ИНС в определении составляющих скорости по информации СНС:
Вычислитель - 18 определяет действительные значения траекторных параметров по информации СНС-8 и ИНС-6. Значения широты ϕд, долготы λд и высоты Hд определяются с помощью следующих соотношений:
где ϕснс, λснс, hснс - координаты ЛА, выдаваемые СНС-8 в момент времени tснс,
VN, VE, VH - составляющие вектора скорости, взятые из выходных параметров ИНС-6;
rN, rE - радиусы кривизны земного эллипсоида;
t - текущее время. Значения остальных выходных параметров полагаются равными соответствующим значениям параметров, полученных от СНС-8.
На вход вычислителя ВРМЛА 20 поступает информация о декартовых координатах каждого ЛА в системе координат, связанной с земным эллипсоидом. Вычисление векторов относительного расположения ЛА происходит по формулам:
Дx = X2-X1
Дy = Y2-Y1 (21)
Дz = Z2-Z1
где X1, Y1, Z1, X2, Y2, Z2 - декартовы координаты первого и второго ЛА.
Расстояние между ЛА вычисляется по формуле
На вход вычислителя ВОС-23 поступает информация о проекциях вектора скорости каждого ЛА в системе координат, связанной с земным эллипсоидом. Вычисление векторов относительной скорости происходит по формулам
Vx = V2x - V1x
Vy = V2y - V1y (23)
Vz = V2z - Vz
где V1xx, V1y, Vz1, V2x, V2y, Vz2 - проекции вектора скоростей первого и соседнего ЛА.
Величина вектора относительной скорости Vr равна
Далее в вычислителе ВПК 17 происходит пересчет прямоугольных координат вектора относительного расположения и вектора относительной скорости соседнего самолета в прямоугольную систему координат с центром в точке нахождения антенны СНС 8 и осями, направленными вдоль строительных осей ЛА.
Вычислитель ВПК 17 преобразования референцных координат в геоцентрические и наоборот реализует следующие алгоритмы.
Пусть координаты центра референц-эллипсоида в геоцентрической системе координат суть X0, Y0, Z0.
Если r - радиус-вектор произвольной точки N в схеме координат X0, Y0, Z0, а R - радиус-вектор той же точки в системе координат X, Y, Z, то преобразование координат из системы X, Y, Z в систему X0, Y0, Z0 будет определяться следующим векторным соотношением
r = Δro+(1+m)ΨEΩR
где m - масштабная поправка геоцентрической системы координат относительно референцной системы
E - матрица направляющих косинусов
w, ε, Ψ - углы Эйлера или углы поворотов вокруг соответственно осей Z, X и Y (за положительное направление отсчета углов поворота принято вращение по часовой стрелке вокруг данной оси, если смотреть с конца оси по направлению к началу системы координат).
В матричном виде преобразование координат выражается
Обратное соотношение в векторной форме, характеризующее переход от системы X0, Y0, Z0 к системе X, Y, Z, имеет вид:
R = (1+m)-1(ΨEΩ)r-1-Δro (27)
Преобразование топоцентрических координат в геоцентрические и наоборот производится в ВПК 17.
Пусть точка М - станция внешнетраекторных наблюдений самолета на поверхность Земли, R - ее радиус-вектор в референцной системе координат, Sp - положение самолета и r (r') - его геоцентрический (топоцентрический) радиус-вектор в системе геоцентрических координат X0, Y0, Z0 (топоцентрических координат X', Y', Z').
Основное векторное выражение для преобразования координат имеет вид:
r = r′+Δr+ΨEΩR
Соответствующие скалярные уравнения выражаются следующим образом:
Координаты Xi Yi, Zi вычисляются по известным геодезическим координатам Bi, Li, Hi.
Эти формулы могут быть использованы для обратного преобразования.
В вычислителе ВПК -17 осуществляется преобразование топоцентрических координат в референцные и наоборот.
Соотношения между радиусом-вектором Rn самолета Spn, радиусом-вектором R точки М (оба вектора рассматриваются в референцной системе X, Y, Z) и топоцентрическим радиусом-вектором R самолета (в системе X, Y, Z) равны
Rn = R+R′n = R(ΨEΩ)-1r (29)
где (ΨEΩ)-1 - матрица, обратная к матрице ΨEΩ
Эти формулы используются для обратного преобразования.
В вычислителе ВЗОС 22 при управлении самолетом в групповом полете должна обеспечиваться безопасность полета. Пространство вокруг каждого ЛА условно разбивается на зоны - зоны допустимого (Ддоп.) диапазона изменения относительного положения самолетов в группе и зона, критического (Дкрит.) сближения (фиг. 2).
Дкрит. = Ддоп.+ к Дт (30)
Под зоной критического сближения понимаются минимальные расстояния, на которые сближаются самолеты группы и при котором можно избежать столкновения ЛА путем выполнения маневров уклонения от столкновения.
Для обеспечения безопасности группового полета необходимо, чтобы ЛА группы не вторгались в объем безопасности, т.е.
Дx(t) < Дкр.
Дy(t) < Дкр.(32)
Дz(t) < Дкр.
где Дx(1), Дy(t), Дz(t) - относительные значения взаимных координат ЛА, при котором еще можно предотвратить столкновение путем выполнения маневров обоими ЛА.
В общем виде Доп. представляет собой сложную функцию многих переменных:
где nyогр, γогр - ограничение сигналов управления избыточной вертикальной перегрузки и крена ЛА.
Конкретная зависимость Доп. вычисляется в центральном вычислителе (ЦВ)12 при условии выполнения неравенства 32, формируется команда на выполнение маневра уклонения от столкновения, облет в вертикальной и горизонтальной плоскостях или совокупность этих команд и торможение. Выходом ЦВ 12 является разрешающая (положительная) команда "безопасно", при которой осуществляется режим стабилизации координат или предупреждающая (отрицательная) команда "опасно", при которой осуществляется сигнализация экипажу об опасном сближении, параметрах движения.
СНС 2 включает в себя 18 - 24 навигационных спутников, которые располагаются таким образом на своих орбитах, что в каждый момент времени в любой точке Земли наблюдается не менее 4-х спутников. Прием сигнала от n-го навигационного спутника позволяет определить на ЛА 1, ЛА 3 необходимые величины. Благодаря тому, что спутник по каналу связи сообщает постоянные параметры своей орбиты на ЛА, вычисляются его координаты ϕ, λ, H и скорости Xsn, Ysn, Zsn, и по принимаемому сигналу определяется дальность Дn(t) между ЛА и спутником и  ее изменения.
ее изменения.
При измерении навигационных параметров Дn(t) и  со спутника передается высокочастотный сигнал, модулированный по фазе с помощью временной функции, форма которой заранее известна и на спутнике, и на ЛА 1. Обычно это последовательность прямоугольных импульсов положительной и отрицательной полярности - псевдошумовая последовательность: закон чередования положительных и отрицательных импульсов известен на спутнике и на приемном пункте - принятый высокочастотный сигнал демодулируется и после этого псевдошумовая последовательность и псевдошумовой сигнал такой же формы, вырабатываемый в приемном устройстве, привязываются к общему времени с помощью самолетных эталонов частоты. По временному сдвигу между этим сигналом и сигналом со спутника определяется время прохождения радиоволн со спутника к ЛА1 и расстояние Д(t) между ними. Скорость Wn(t) =
со спутника передается высокочастотный сигнал, модулированный по фазе с помощью временной функции, форма которой заранее известна и на спутнике, и на ЛА 1. Обычно это последовательность прямоугольных импульсов положительной и отрицательной полярности - псевдошумовая последовательность: закон чередования положительных и отрицательных импульсов известен на спутнике и на приемном пункте - принятый высокочастотный сигнал демодулируется и после этого псевдошумовая последовательность и псевдошумовой сигнал такой же формы, вырабатываемый в приемном устройстве, привязываются к общему времени с помощью самолетных эталонов частоты. По временному сдвигу между этим сигналом и сигналом со спутника определяется время прохождения радиоволн со спутника к ЛА1 и расстояние Д(t) между ними. Скорость Wn(t) =  изменения дальности определяется либо по скорости "слежения", генерируемого на борту псевдошумового сигнала за принимаемым сигналом, либо по доплеровскому сдвигу принимаемого радиосигнала.
изменения дальности определяется либо по скорости "слежения", генерируемого на борту псевдошумового сигнала за принимаемым сигналом, либо по доплеровскому сдвигу принимаемого радиосигнала.
Элементы орбиты спутника, которые с высокой точностью можно считать постоянными в течение 1 - 2 ч передаются со спутника с интервалом всем потребителям. По элементам орбиты и бортовому времени вычисляются декартовы координаты Xsn, Ysn, Zsn спутника для любого наперед заданного (текущего) момента времени, а уже по расстояниям до трех спутников, находящихся в известных точках пространства, определяется местоположение ЛА. По значениям скорости изменения дальности до трех спутников вычисляется вектор W земной скорости ЛА.
Сигналы спутников излучаются в двух диапазонах частот для потребителей с санкционированным доступом (повышенная точность измерений) и доступным для любого потребителя. Для повышения точностных характеристик используется дифференциальный метод определения координат МП, суть которого заключается в выявлении и учете в виде поправок сильнокоррелированных составляющих погрешностей навигационных параметров с помощью наземных контрольно-корректирующих пунктов (ККС) 4. На ККС 4 с помощью аппаратуры потребителя определяются координаты и сравниваются с данными геодезической привязки. Затем производится расчет соответствующих поправок, которые передаются по каналу радиосвязи потребителям СНС заданного района, что позволяет им, вводя поправки, повысить точность навигационных определений. В дифференциальном режиме работы для повышения точности определения координат принимаются дополнительные меры. В частности, на земле в зоне проведения измерений, в точке с известными координатами, устанавливается ККС, которая вырабатывает поправки к измеренным до спутниковой псевдодальностям и передает эти поправки на борт ЛА. Бортовой приемник СНС 8 вычисляет свое положение с учетом принятых дифференциальных поправок, что позволяет повысить точность определения координат до уровня погрешностей 3-5 м. Дальнейшее повышение точности определения координат достигается за счет сглаживания фазы несущей (2σ = 1-3 м), использования двухчастотного измерения псевдодальностей (2σ = 1-3 м), применения P - кода для измерения псевдодальностй (2σ =/ 0,5-1 м).
На борту каждого из двух ЛА - 1, 3 (ведущего и ведомого) - устанавливается один и тот же состав спутниковой аппаратуры:
самолетный GPS приемник, например TNL-2000А с встроенным дисплеем и GPS - антенной;
самолетный связной контроллер, например TNL-2800A с антенной УКВ-диапазона.
Приемник предназначен для определения по сигналам GPS пространственных координат ЛА ϕ, λ, Hг и составляющих вектора скорости его движения (VN, VE, VY).
В связи со спецификой функционирования спутниковых навигационных систем в приемнике производится также вычисление поправок к шкале времени и частоты собственного хранения времени Т и опорного генератора.
К перечисленным выше функциям приемника в стандартном режиме работы при переходе в дифференциальный режим добавляются задачи приема и учета корректирующей информации, вырабатываемой ККС 4 и вычисление вышеперечисленных параметров по скорректированным радионавигационным измерениям.
Прием излучаемой с ККС 4 корректирующей информации и ввод ее в аппаратуру СНС 8 осуществляется с помощью связного специализированного устройства управления самолетного контроллера специализированного устройства управления.
Контроллер 9 обеспечивает прием кодовой информации, ее декодирование и представление в формате, пригодном для ввода в приемник 8.
Связной контроллер 9 имеет в своем составе генератор, согласованный с аналогичной схемой ККС 4, что обеспечивает синхронизированную работу бортовой и наземной аппаратуры.
В самолетном контроллере - 9 предусмотрен пакетный мультиплексный режим, который обеспечивает передачу с ККС к потребителю информации для слежения за объектами по координатам и скорости (от потребителя к ККС-4) по одному каналу. Выдерживание циклограммы двустороннего обмена информацией по одному каналу возможно благодаря использованию шкалы времени GPS 4800. Работа на борту полностью автоматизирована.
ИНС 6 платформенного или бесплатформенного типа [5] обеспечивает автономное счисление координат местоположения ЛА и высоты полета путем интегрирования измеряемых акселерометрами ускорений.
Бесплатформенная инерциальная система ИНС обеспечивает определение и выдачу потребителю ЛА-1 следующих параметров: географические координаты, путевую скорость и составляющие путевой скорости, угловое положение ЛА, угловые скорости и ускорения, вертикальную скорость и высоту.
ИНС 6, например LTN-92 или ИНС-85, по сравнению с платформенными обеспечивает определение большего количества параметров движения ЛА (ωx, ωy, ωz,) строится на базе лазерных гироскопов, обеспечивая их более высокую точность и малое время готовности.
Основной характеристикой инерциальных систем является погрешность определения координат местоположения самолета в полетах длительностью 10-14 ч и более, которая с вероятностью 95% (2σ) не должна превышать 2 морскиe мили (3,7 км) в среднем за каждый час полета.
При этом погрешности по составляющим путевой скорости не должны превышать значений (2σ) 3,5 м/с; по вертикальной скорости - 1, м/с; по углам крена, тангажа и курса - 6 угловых минут.
БФИ 21 осуществляет общую организацию работы СОИ 25. Он собирает всю информацию, подготовленную вышерассмотренными блоками в единую посылку, поступающую для формирования каждого информационного кадра. БФИ 21 содержит программы формирования информации вычислителей картины, выдаваемой летчику на электронный или жидкокристаллические индикаторы (ЖКИ), а также команды, по каким программным модулям должна появиться информация для СОИ. БФИ 21 выдает текущие и допустимые значения параметров Дтек., Vдтек., Hтек., Zтек, Ддоп, Vддоп., Hдоп, Zдоп, а также признаки срабатывания сигнализации при приближении к допустимым значениям этих параметров.
СОИ 25 предназначена для обеспечения отображения экипажу на своем индикаторе информации и сигнализации о взаимном положении одного ЛА относительно другого. СОИ 25 формирует картину для изображения формата, поступающего из БФИ 21.
Средства СОИ 25 базируются на ЖКИ с высокой разрешающей способностью. ЖКИ с активной структурой имеет в каждой ЖКИ ячейке электронный ключ - тонкопленочный транзистор или диод, который существенно улучшает параметры ЖКИ. Угол обзора такого индикатора до 60o, контрастность в 2-3 раза выше. Количество цветов увеличено в 40 раз. Индикатор не теряет засветки прямыми солнечными лучами, а большой угол обзора позволяет сделать информацию ЖКИ доступной обоим летчикам без изменения рабочей зоны.
Состав информации, представляемой экипажам обоих ЛА, обеспечивает наглядную объективную картину взаимного положения самолетов, тенденцию к изменению этого положения, контроль допустимого уровня сближения, а также эффективную уведомляющую и предупреждающую световую и звуковую сигнализацию экипажам об опасной ситуации для своевременного ее парирования.
В качестве единой системы координат выбрана декартова система с центром тяжести ЛА 1 командира группы. Тогда на индикаторе СОИ (вид сзади) ось, совпадающая с вектором скорости Vox представляется точкой, при этом индекс ЛА 1 будет индицировать угол крена, а индекс ЛА 3 будет смещен на величину H по оси OY и на Z по оси OZ и его угловое положение будет индицировать крен ЛА 3 (фиг. 3, 4).
Пилоту ЛА 1 необходимо знать положение ЛА 1 в земном пространстве, углы ЛА и местоположение ЛА как материальной точки (превышение, продольное смещение и боковое смещение векторов движения ЛА) в опорной системе координат и программные значения параметров полета. Второму пилоту необходима та же информация, а также направление движения "ведущего" и его предполагаемое изменение в пространстве.
Для "построения картины" картины на ЖКИ - экране СОИ-25 используется информация аппаратуры 11 межсамолетного обмена и от других датчиков информации - углы тангажа, курса, крена, угловые скорости, линейные перегрузки и другие параметры движения ЛА.
Форматы изображения информации экипажу представлены на фиг. 3, 4 - мнемоническое изображение взаимного положения ведущего (ВЩ) и ведомого (ВМ) ЛА.
В информационном поле индикатора размещаются cилуэты самолетов, например, оранжевого цвета. Силуэт "своего" самолета располагается в центре экрана и неподвижен в горизонтальном и вертикальном направлении.
Силуэт "соседнего самолета перемещается как по вертикали (высоте), так и по горизонтали (боковому смещению).
Оба силуэта имеют возможность вращения вокруг продольной оси для мнемонической демонстрации крена обоих самолетов и тенденции направления сближения (расхождения).
Вблизи каждого силуэта расположен номер данного ЛА, окрашенный в оранжевый цвет (который может соответствовать номеру его "позывного"), и вводится в СПС перед полетом.
В левой нижней частях экрана располагаются шкалы "превышения" по высоте и "бокового смещения" ЛА белого цвета, отградуированные в метрах.
В зависимости от дистанции одного ЛА до другого предусматриваются 2 диапазона отсчета превышения и бокового смещения: точный - +40 м, грубый - +200 м. Переключение диапазонов происходит автоматически при достижении значений высоты - H; Z = 40 м. По каналам H, Z скользят индексы отсчета, оранжевого цвета, связанные с силуэтами самолетов.
Вокруг "соседнего" самолета схематично нанесена зона опасного сближения (зона ограничений), которая задается оперативно (вводится в вычислитель) в зависимости от требований программы летных испытаний (с учетом геометрических размеров самолетов) и конкретного задания на испытательный полет. В СПС предусматриваются 2 уровня (порога) сигнализации "опасного" сближения:
при достижении первого порога рамка зоны окрашивается, например, в красный цвет и в верхней части поля индикатора появляется надпись красного цвета "Опасное сближение", сопровождаемое речевой (звуковой) сигнализацией;
при достижении второго порога рамка зоны начинает работать в проблесковом режиме, надпись "Опасное сближение" заменяется надписью "Уход" с соответствующей речевой (звуковой) сигнализацией, а в верхней части экрана появляются стрелки с мнемоническим направлением маневром самолетов для выхода из опасной зоны.
В левой части экрана располагаются счетчики:
- заданной допустимой дистанции сближения ЛА;
- заданной допустимой скорости изменения дистанции, а также текущие значения этих параметров, окантованные, например, зеленой рамкой.
При достижении допустимого значения дистанции сближения (достижения - порогов срабатывания сигнализации 1-го и 2-го уровней) рамка сначала окрашивается в красный цвет, а затем работает в проблесковом режиме.
Для мнемонической демонстрации изменения скорости дистанции сближения из силуэта "своего" самолета на "соседний" самолет направлен "вектор скорости сближения", длина которого изменяется пропорционально скорости сближения.
Вектор окрашен в зеленый цвет.
При попадании информации о взаимном положении самолетов (например, при отказах элементов СПС на любом борту) перечисленная выше информация на экранах индикаторов пропадает.
Обмен информацией между двумя ЛА - 1 и 3 (ведущим и ведомым) проводится с помощью аппаратуры межсамолетного обмена 11. Обмен осуществляется по информации из центральных вычислителей 12 от ведущего и ведомого ЛА о:
- координатах ϕ1, λ1; ϕ2, λ2;
- составляющих скоростей VN1, VE1, VY1, VN2, VE2, VY2;
- высоте Hг, Hг;
- текущем времени Ттек1, Ттек2.
Аппаратура линии передачи данных для межсамолетного обмена предназначена для передачи и приема координат самолета, составляющих его скорости и другой информации, необходимой для определения взаимного положения двух ЛА.
Линия передачи данных 11 для каждого самолета включает:
- передатчик;
- приемник;
- интерфейс связи для преобразования выходных сигналов ЭВМ-12 из стандарта последовательного порта RS-232 в вид, необходимый для модуляции несущей частоты передатчика;
- интерфейс связи для выделения полезного сигнала из смеси сигнал/шум, поступающей с выхода приемника, и преобразование его в вид, необходимый для ввода в ЭВМ через последовательный порт RS -232;
- антенно-фидерное устройство;
- блок питания.
Канал связи для межсамолетного обмена имеет следующие характеристики: рабочая частота - 102,0-109,5 мГц, мощность передатчика - не менее 1 Вт, чувствительность приемника - не хуже 5 мкВ, тип модуляции несущей - Амн, скорость передачи - до 19,2 бод.
В пакетах межсамолетного обмена содержится следующая информация:
- время СНС;
- координаты ЛА (ϕ, λ, H);
- составляющие скорости (VN, VE, VY);
- номера спутников рабочего созвездия;
- признак режима работы (стандартный, дифференциальный).
Межсамолетный обмен организован на скорости 9600 бод и выше. При этом ввиду минимального объема передаваемой информации время, затрачиваемое на ее передачу (прием), не превышает 50 мс; шкала времени современных GPS приемников позволяет синхронизировать информацию с точностью 1 • 10-4 с, причем синхронизирующая метка повторяется каждую секунду, что позволяет реализовать межсамолетный обмен с частотой не хуже 4 Гц.
Система предупреждения столкновений ЛА при проведении летных испытаний может выдавать управляющие сигналы в САУ 29 и AT 28.
Контур отработки заданного крена и заданной перегрузки САУ 29 и структура приведены в [3].
Для обеспечения контроля при проведении ЛA в СПС предусмотрена передача с бортов двух ЛА на ПУЛЭ 5 параметров ϕ, λ, H, истинный курс (ИК).
Технические средства управляемого летного эксперимента обусловлены большим объемом информации, поступающими в ПУЛЭ 5, наличием мощных вычислительных средств в составе ПУЛЭ, позволяющих реализовать достаточно оперативно практически любые алгоритмы работы бортовых систем, комплексной обработки информации.
Средства сбора и передачи информации ПУЛЭ 5 включают:
- бортовые радиотехнические системы (передатчики и антенну);
- наземные приемные радиотехнические станции;
- линии передач радиотелеметрической информации с ПУЛЭ;
- системы внешнетраекторных измерений - радиотехнические и оптические;
- систему единого времени;
- ЭВМ;
- пилотажный стенд сопровождающего моделирования.
На ПУЛЭ 5 проводятся преобразования координат ϕ, λ, H в полярные - Д, A, и строится взаимное расположение двух ЛА. ПУЛЭ 5 является рабочим местом экспериментаторов и содержит систему отображения информации (СОИ) в виде ряда графических и алфавитно-цифровых дисплеев, установленных на рабочих местах экспериментаторов, средства документирования информации, графопостроители, устройства для снятия твердых копий, алфавитно-цифровые печатающие устройства, видеомагнитофоны, средства передачи управляющих команд на борт ЛА 1, ЛА 3, средства связи с взаимодействующими службами - (ККС 4), обеспечивающими летный эксперимент руководителей полетов. Погрешность определения проекций вектора относительного расположения и вектора относительной скорости зависит от ряда факторов. Основными из них являются:
- погрешности определения координат и скорости СНС;
- погрешности определения координат и скорости ИНС;
- временная задержка при получении информации от соседнего самолета;
- методические ошибки, вносимые при проведении расчетов и преобразования координат.
Считая все составляющие погрешности независимыми между собой, погрешности в определении относительного расстояния ΔR относительной скорости ΔV равны:

Здесь Δr1x, Δr1y, Δr1z - погрешности вычисления координат первого самолета, обусловленные погрешностями СНС и ИНС;
Δe1t - погрешности приведения данных СНС и ИНС к моменту проведения вычислений местоположения самолета;
Δr2x, Δr2y, Δr2z - погрешности вычисления координат соседнего самолета;
Δe2t - погрешность, вносимая в вычисление относительного расстояния временной задержкой передачи информации от соседнего самолета;
ΔeB - методическая погрешность расчетов;
ΔV1x, ΔV1y, ΔV1z - погрешности вычисления проекции вектора скорости первого самолета, обусловленные погрешностями СНС и ИНС;
ΔU1t - погрешность приведения данных СНС и ИНС к моменту проведения вычислений местоположения самолета;
ΔV2x, ΔV2y, ΔV2z - погрешности вычисления проекций вектора скорости соседнего самолета;
ΔU2t - погрешность, вносимая в вычисления относительной скорости временной задержки передачи информации от соседнего самолета;
ΔUB - методическая погрешность расчетов.
Рассмотрим погрешность определения расстояния между самолетами без учета временных задержек, связанных с передачей информации от соседнего самолета и с запаздыванием данных СНС и ИНС к моменту вычисления местоположения. В этом случае погрешность имеет вид:
где Δr - погрешность определения координат самолетов.
При различных режимах определения координат она составит (на уровне):
- при использовании информации СНС в стандартном режиме - 75 м,
- при использовании информации СНС в дифференциальном режиме - 12 м,
- при использовании комплексной информации ИНС + СНС в дифференциальном режиме - 6 м.
Погрешность Δe2t, вносимая задержкой передачи информации соседнего самолета без алгоритмического учета этой задержки, определяется как Δe2t = |V2|Δt, и имеет недопустимо большую величину. (При скорости самолета на уровне V = 250 м/с и t = 1/4 с, Δe2t = 60 м). Это приводит к необходимости учета временной задержки с использованием информации о составляющих скорости соседнего самолета в алгоритме определения расстояния.
Погрешность Δe2t снижается с помощью приведения данных к текущему моменту времени, когда производятся вычисления. При передаче информации с борта соседнего самолета в кадре содержится Гринвичское время, относящееся на момент вычисления передаваемых параметров. На первом самолете системный таймер ЭВМ согласован с Гринвичским временем, поэтому в ЭВМ определяется интервал времени Δt между моментом вычисления координат на борту соседнего самолета и текущим моментом времени. После приведения данных к текущему моменту времени оставшуюся составляющую погрешности можно оценить с помощью величины 1/2Δt2|aм|, которая при Δt = 1/4 с и |aм| на уровне g не превосходит 0,3 м и является несущественной по сравнению с погрешностями определения координат.
Аналогично величина Δe1t уменьшается при приведении данных к единому фронту времени. Остаточная погрешность не превосходит величины
1/2|aм|Δt2
где |aм| - абсолютная величина максимально возможного ускорения самолета,
Δt - интервал времени между моментом последнего вычисления координат СНС и текущим моментом проведения вычислений. Эта величина также не играет существенной роли в суммарной погрешности определения расстояния.
Погрешности ΔeB и ΔUB/ относительно малы и вносят в суммарную погрешность величину, которой можно пренебречь.
Величины ΔU1t и ΔU2t уменьшаются после приведения данных к текущему моменту времени, и погрешность определения относительной скорости определения относительной скорости определяется погрешностями вычислений составляющих скорости самолетов по информации ИНС и СНС.

Таким образом, использование алгоритмов комплексной обработки информации ИНС и СНС в дифференциальном режиме наряду с алгоритмами приведения информации к текущему моменту времени позволяет получить оценку относительного расстояния с погрешностью на уровне σ = 6 м и относительной скорости на уровне σΔV = 0,05 м/с.
Значительное повышение точности определения местоположения ЛА достигается в результате комплексной обработки информации (КОИ) сигналов инерциальной системы и СНС.
Для расчета точностных характеристик алгоритма КОИ использовались тестовые файлы исходной информации. Файлы исходной информации подготовлены с помощью математического моделирования полетных данных и содержат информацию ИНС и СНС.
Параметры навигационных систем моделировались с помощью программного обеспечения, которое позволяет формировать:
- параметры траекторного движения ЛА от взлета до посадки с участками прямолинейного полета и разворотов;
- погрешности навигационных систем: ИНС, СНС и др. с помощью математических моделей их погрешностей;
- формирование полных сигналов бортовых навигационных систем при полете ЛА от взлета до посадки с учетом их погрешностей.
В реализациях, которые записаны в тестовые файлы погрешности ИНС, формировались с помощью линейной динамической модели со следующими начальными условиями:
ΔSx(t) 500m
ΔSy(t) 500m
ΔVx(t) 1m/c
ΔVy(t) 1 m/c
ϑx(t) 1min
ϑy(t) 1min
ϑz(t) 10min
ωx 0,01
ωy 0,01
ωz 0,01
mx 0,01
my 0,01
Погрешности СНС моделировались с помощью датчика нормально распределенной случайной величины со следующими значениями СКО:
σΔϕснс = σΔλснс = σΔHснс = 25 м
для стандартного режима работы СНС и
σΔϕснс = σΔλснс = σΔHснс = 5 м
для дифференциального режима работы СНС.
Траектория движения ЛА моделировалась в виде прямолинейных участков, сопряженных четырьмя участками разворотов. На участке полета продолжительностью 300 с. имитировалось отсутствие информации СНС.
Погрешности СНС, имеющие уровень 2σ = 50 м, при комплексировании с информацией ИНС ослабляются с помощью фильтра Калмана до уровня 2σ = 10 м.
При отсутствии информации СНС в течениe З00 с обеспечивается компенсация ошибок ИНС до уровня 2σ = 10 м (фильтр работает в режиме "прогноз").
При этом ошибки алгоритма КОИ в определении составляющих скорости после 3-х разворотов, необходимых для компенсации курсовой погрешности ИНС, не превышают 2σ = 0,03 м/с.
При использовании информации СНС в дифференциальном режиме, при котором уровень ошибок СНС составляет 2σ = 10 м, комплексная обработка информации СНС и ИНС позволяет снизить уровень ошибок определения координат самолета с помощью СНС в два раза 2σ = 5 м.
Таким образом, результаты моделирования показывают, что применение комплексной обработки информации ИНС и СНС позволяет в 2 раза повысить точность полученных оценок.
Список литературы
1. Система, позволяющая избежать столкновение самолетов. Аналог. Международная заявка 82/02432 G 01 S 1/10, 3/02 от 82.07.22 N 18 PCT/US81/00016.
2. TCAS II Traffik alert collision avoidance system. Allied-Signal aeraspace Company Bendlix King Air Transport Avionics Division. Division Headquarters Bendix/King. Техническое описание и проект 24 стр. Прототип.
3. Белогородский С.Л. Автоматизация управления посадкой самолета. - M.: Транспорт, 1972, стр. 205.
4. Методология испытаний пилотажно-навигационных систем самолетов и вертолетов, под ред. Новодворского Б.М. и Харина Е.Г. М.: Машиностроение, 1984, стр. 80.
5. Помыкаев И.Н., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. - М.: Машиностроение, 1983.
6. Ларионов А.М., Горнец Н.Н. Периферийные устройства в вычислительных системах. - М.: Высшая школа, 1991, стр. 19.
7. Солодовников В.В., Коньков В.А., Суханов В.А., Шевяков О.В. Микропроцессорные автоматические системы регулирования. - М.: Высшая школа, 1991, стр. 187.
8. Тарасов В.Г. Межсамолетная навигация.- М.: Машиностроение, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
Изобретение относится к авиационной технике, в частности, пилотажно-навигационным комплексам, и предназначено для установки на летательные аппараты (ЛА). Технический результат заключается в повышении точности и безопасности полета при летных испытаниях за счет представления параметров взаимного пространственного положения и движения двух ЛА. Система предупреждения столкновений летательных аппаратов при летных испытаниях содержит систему измерений высотно-скоростных сигналов (СВС), адаптер ввода, адаптер вывода, центральный вычислитель, включающий блок ввода констант, вычислитель параметров взаимного положения ЛА, вычислитель действительных координат, вычислитель расстояния между летательными аппаратами, вычислитель предварительной обработки данных, вычислитель относительной скорости, вычислитель зоны опасного сближения, вычислитель единого временного фронта, а также системы отображения информации и сигнализации, систему автоматического управления (САУ) и автомат тяги (AT), спутниковую навигационную систему, инерционную навигационную систему, аппаратуру межсамолетного обмена, связный контроллер. Кроме того, в состав системы входят наземная контрольно-корректирующая станция и пункт управления летным экспериментом, при этом связный контроллер ЛА радиотехнически связан с контрольно-корректирующей станцией, пункт управления летным экспериментом радиотехнически связан с аппаратурой межсамолетного обмена. 1 з.п.ф-лы, 4 ил.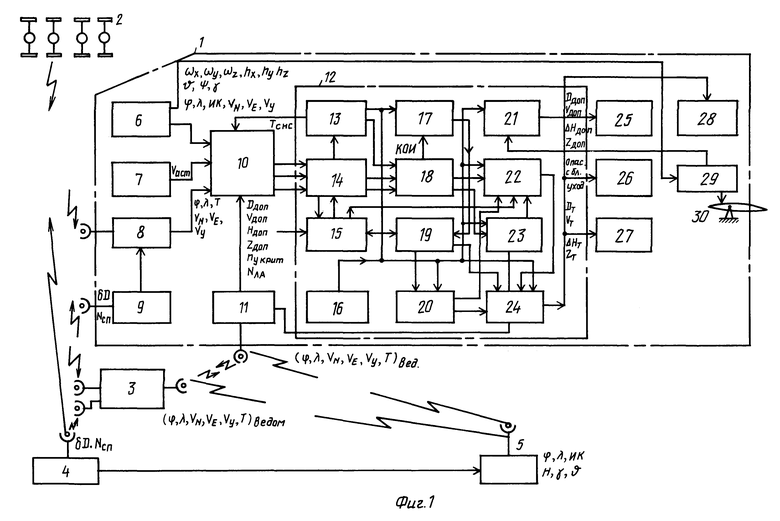
| TCAS II Traffik alert collision avoidance system | |||
| Allied - Signal aeraspace Company Bendlix King Air Transport Avionics Division | |||
| Division Headquarters Bendix/King | |||
| Техническое описание и проект, 1990 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| СПОСОБ ОКРАШИВАНИЯ И ХРАНЕНИЯ КОСТНЫХ ПРЕПАРАТОВ, СОДЕРЖАЩИХ ТОНКИЕ НЕРВЫ | 2010 |
|
RU2438307C2 |
| Белгородский С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с.205 | |||
| Методология испытаний пилотажно-навигационных систем самолетов и вертолетов / Под ред.Новодворского Б.М | |||
| и Харина Е.Г | |||
| - М.: Машиностроение, 1984, с.80. | |||
