Настоящее изобретение относится к способам и устройствам, предупреждающим внезапное ускорение транспортного средства, в частности, к способу и устройству, предупреждающему внезапное ускорение транспортного средства с автоматической трансмиссией за счет торможения, предупреждающего внезапное ускорение транспортного средства с определением момента внезапного ускорения, используя состояние передачи и частоты вращения двигателя транспортного средства.
Внезапное ускорение - явление, когда транспортное средство ускоряется внезапно и неумышленно, из-за того, что за 2-3 секунды двигатель достигает 5000-7000 оборотов в минуту при перемещении рычага автоматической трансмиссии из нейтрального положения N или парковочного положения Р в положение движения D или положение заднего хода R. Вследствие явления внезапного ускорения при перемещении рычага из положения N или Р в D или R, после того как сначала частота вращения двигателя достигнет 5000-7000 оборотов в минуту, а затем момент будет передан диску, транспортное средство внезапно ускоряется. В этот момент частота вращения двигателя сначала снижается до 2500-3500 оборотов в минуту, однако затем резко увеличивается до 5000-7000 оборотов в минуту за меньший промежуток времени, чем при нормальной работе с использованием акселератора (педали "газа"). На практике это заставляет транспортное средство вовлекаться в разгон и увеличивать скорость внезапно, что носит название "внезапного ускорения".
В последнее время такое внезапное ускорение и связанные с ним несчастные случаи появляются чаще и таким образом привлекают к себе все больший интерес. Поэтому были проведены различные эксперименты в национальных и частных лабораториях для выявления источников проблемы, таких как электромагнитная интерференция ЭМИ (электромагнитных импульсных) помех. Однако никто не выяснил причину.
Настоящее изобретение разработано для преодоления вышеописанных проблем, и целью изобретения является создание устройства и способа предупреждения внезапного ускорения транспортного средства, которые тормозят транспортное средство, предупреждая внезапное ускорение, когда двигатель транспортного средства достигает определенной частоты вращения за определенное время при начале или продолжении движения транспортного средства.
Другой целью данного изобретения является создание устройства и способа предупреждения внезапного ускорения транспортного средства, которые тормозят транспортное средство, предупреждая внезапное ускорение, когда двигатель транспортного средства достигает заданной частоты вращения за определенное время при начале движения или при перезапуске транспортного средства; и, кроме того, предупреждения внезапного торможения при движении транспортного средства с высокой скоростью.
С целью осуществления вышеописанной задачи, данное изобретение предлагает устройство для предупреждения внезапного ускорения транспортного средства, включающее датчик ключа зажигания, для обнаружения наличия ключа зажигания в замке; датчик частоты вращения - для определения частоты вращения; датчик положения трансмиссии - для определения включенной передачи; датчик АСС для определения ускорения, которое вводится посредством педали управления подачей топлива; управляющее устройство для распознавания входных сигналов от датчика ключа зажигания, датчика частоты вращения, датчика положения трансмиссии, датчика АСС, определяющее внезапное ускорение в результате распознавания и вырабатывающее впоследствии управляющие сигналы для торможения двигателя и блокировки/разблокировки тормоза, устройство блокировки мощности двигателя - для блокирования подачи питания к двигателю согласно сигналу контроля блокировки мощности двигателя, от управляющего устройства; и устройство блокирования тормоза, для блокировки/разблокировки тормозного двигателя согласно управляющим сигналам блокировки/разблокировки от управляющего устройства.
В изобретении управляющее устройство может определять внезапное ускорение, когда частота вращения двигателя резко увеличивается в начале движения, в пределах первого эталонного интервала времени в случае, если датчик положения трансмиссии не получает сигнал о переключении трансмиссии из положения N или Р в D или R и датчик АСС определяет, что напряжение, заданное ускорением, вводимым через педаль управления подачей топлива, меньше, чем опорное напряжение.
В изобретении управляющее устройство определяет внезапное ускорение, когда частота вращения резко увеличивается в пределах второго эталонного промежутка времени, хранящегося в памяти управляющего устройства в случае, если датчик положения трансмиссии фиксирует сигнал о переключении трансмиссии из положения N или Р в D или R, после ввода ключа зажигания.
В изобретении управляющее устройство определяет внезапное ускорение согласно выходным сигналам датчика частоты вращения и датчика АСС, когда трансмиссия переключается из положения N или Р в D или R, и не фиксируется частота вращения, во время движения транспортного средства.
В изобретении устройство блокировки мощности двигателя содержит коммутационный транзистор, включающийся согласно управляющему сигналу блокировки мощности двигателя от управляющего устройства; и реле для блокирования подачи электропитания к двигателю, когда включается транзистор.
В данном изобретении устройство блокировки мощности двигателя содержит моторный блок, в котором есть тормозной мотор для торможения транспортного средства; блок питания тормозного усилия для питания тормозного двигателя, блокирующего тормоз согласно управляющему сигналу блокирования тормоза от управляющего устройства; блок питания разблокировки тормоза, снабжающий питанием тормозной мотор, разблокирующий тормоз в соответствии с управляющим сигналом разблокирования тормоза от управляющего устройства.
В изобретении в качестве тормозного двигателя предпочтителен понижающий моторедуктор.
С целью торможения транспортного средства в устройстве моторный блок соединяется с педалью акселератора стальной проволокой, которая намотана на барабан, закрепленный на валу двигателя через ролик, установленный на днище кузова транспортного средства.
В изобретении моторный блок оказывает тормозное усилие путем нажатия гидравлического тормоза в тормозном блоке с использованием опорного элемента, вращательно закрепленного на кузове транспортного средства, когда тормозной двигатель вращается по часовой стрелке, а разблокирующее усилие осуществляется путем вытягивания гидравлического тормоза с использованием опорного элемента, когда тормозной двигатель вращается против часовой стрелки.
В изобретении моторный блок оказывает тормозящее или разблокирующее усилие, нажимая или вытягивая гидравлический тормоз в тормозном блоке при помощи тяги, вращательно соединенной с валом тормозного двигателя, тяга способна передвигаться вправо/влево согласно вращению тормозного двигателя по или против часовой стрелки.
В изобретении блок питания тормозного усилия содержит коммутационный транзистор, открывающийся в соответствии с управляющим сигналом блокирования тормоза из управляющего устройства; и реле для блокирования тормозного двигателя, подающее питание к тормозному двигателю, когда транзистор открыт.
В изобретении блок питания тормозного усилия содержит коммутационный транзистор, открывающийся в соответствии с управляющим сигналом блокирования тормоза из управляющего устройства, и реле для разблокировки тормозного двигателя, подающее питание обратной полярности к тормозному двигателю, когда транзистор открыт.
Для достижения вышеупомянутого эффекта, данное изобретение предлагает способ для предупреждения внезапного ускорения транспортного средства, включающий первый процесс определения, изменяется ли передача из стояночного положения в положение передвижения, определяющий отсутствие внезапного ускорения в случае, если обороты двигателя транспортного средства не увеличиваются резко в пределах первого эталонного промежутка времени, когда передача находится в стояночном положении, или определяющий, что имеется внезапное ускорение в случае, когда обороты двигателя резко увеличиваются вместе со входным напряжением акселератора относительно опорного напряжения, когда передача находится в стояночном положении, и блокирующий тормоз транспортного средства; и второй процесс определения внезапного ускорения с другой стороны, действительно ли блокировать двигатель и активизировать тормозную систему из соображения положения трансмиссии, оборотов двигателя и сигнала ускорения в случае, если первый процесс определяет, что внезапное ускорение отсутствует.
В данном способе, первый процесс содержит шаги сравнения времени достижения первой и второй эталонной частоты вращения с первым эталонным промежутком времени, когда трансмиссия находится в стояночном положении, первая эталонная частота вращения и вторая эталонная частота вращения задаются для определения внезапного ускорения.
Переходящий на второй процесс в случае, если первый эталонный промежуток времени меньше, чем время достижения первой и второй эталонных частот вращения, и определяющий, является ли входное напряжение акселератора меньшим по сравнению с опорным напряжением в случае, если первый эталонный промежуток времени - не меньше, чем время достижения первой и второй эталонных частот вращения.
Переходящий на второй процесс в случае, если это входное напряжение акселератора - не меньше, чем опорное напряжение, и сравнивающий время достижения частоты вращения, от первой до второй эталонной частот вращения, с третьим эталонным промежутком времени в случае, если это входное напряжение акселератора - меньше, чем опорное напряжение.
Переходящий на второй процесс в случае, если это время достижения частоты вращения, от первой до второй эталонной частот вращения - не меньше, чем третий эталонный промежуток времени, и определяющий, находится ли трансмиссия в стояночном положении в случае, если время достижения частоты вращения, от первой до второй эталонной частот вращения меньше, чем третий эталонный промежуток времени.
Переходящий на второй процесс в случае, если трансмиссия находится в стояночном положении, и блокирующая двигатель и активизирующая тормозную систему в случае, если в результате определения транспортное средство двигается.
В данном способе, второй процесс содержит шаги, определяющие наличия изменения положения трансмиссии из стояночного положения в положение движения, затем сравнивающие время достижения первой и второй эталонной частот вращения со вторым эталонным промежутком времени, второй эталонный промежуток времени задается для определения внезапного ускорения, когда трансмиссия переводится из стояночного положения в положение движения, и затем повторно контролирующие положение трансмиссии в случае, если второй эталонный промежуток времени - меньше, чем время достижения первой и второй эталонной частот вращения; определяющие, что входное напряжение акселератора меньше, чем опорное напряжение для определения внезапного ускорения в случае, если второй эталонный промежуток времени - не меньше, чем время достижения первой и второй эталонной частот вращения.
Переходящие на первый процесс в случае, если входное напряжение акселератора - не меньше, чем опорное напряжение, и сравнивающие время достижения частоты вращения, от первой до второй эталонной частот вращения с третьим эталонным промежутком времени в случае, если входное напряжение акселератора - меньше, чем опорное напряжение.
Переходящие на первый процесс в случае, если время достижения частоты вращения, от первой до второй эталонной частот вращения - не меньше, чем третий эталонный промежуток времени, и определяющие, находится ли трансмиссия в стояночном положении в случае, если время достижения частоты вращения, от первой до второй эталонной частот вращения - меньше, чем третий эталонный промежуток времени.
И переходящие на первый процесс в случае, если трансмиссия находится в стояночном положении, и, блокируя двигатель и активизируя тормозную систему в случае, если трансмиссия находится в положении движения.
Кроме того методика может содержать третий процесс определения, наличия внезапного ускорения в случае, если частота вращения резко возрастает в пределах второго эталонного промежутка времени, когда первый процесс определяет наличие изменения положения трансмиссии из стояночного в положение движения, и в таком случае блокирующий двигатель и активизирующий тормозную систему.
В данном способе, третий процесс содержит шаги сравнения времени достижения первой и второй эталонных частот вращения со вторым эталонным промежутком времени для определения внезапного ускорения; определяющие, что входное напряжение акселератора - меньше, чем опорное напряжение в случае, если время достижения первой и второй эталонных частот - не меньше, чем второй эталонный промежуток времени; сравнивающие время достижения частоты вращения, от первой до второй эталонной частот вращения с третьим эталонным промежутком времени в случае, если входное напряжение акселератора - меньше, чем опорное напряжение, третий эталонный промежуток времени задается для определения внезапного ускорения, когда частота вращения резко увеличивается; контролируя перемещение транспортного средства в случае, если время достижения частоты вращения, от первой до второй эталонной частот вращения - меньше, чем третий эталонный промежуток времени; и блокирования двигателя и тормоза в случае перемещения транспортного средства.
Кроме того методика может содержать шаги разблокирования тормоза для переключения стопора в начале движения транспортного средства, в момент переключения передачи из стояночного положения в положение движения в случае, если тормоз заблокирован;
Переходящие на второй процесс после разблокировки тормоза в случае, если первый процесс определяет отсутствие резкого увеличения частоты вращения в пределах первого эталонного промежутка времени.
Для достижения вышеописанных целей, представленное изобретение предлагает другой способ для предотвращения внезапного ускорения транспортного средства, включающий первый процесс определения, наличия изменения положения трансмиссии транспортного средства из стояночного в положение движения, после запуска транспортного средства; второй процесс определения, отсутствия внезапного ускорения в случае, если не фиксируется резкое увеличение частоты вращения в пределах первого эталонного промежутка времени, когда транспортное средство находится в первоначальном стояночном состоянии в результате определения первым процессом, определяющим наличие внезапного ускорения в случае, если частота вращения резко увеличивается, когда входное напряжение акселератора - меньше, чем опорное напряжение, даже в стояночном положении, и блокирующим двигатель и активизирующим тормозную систему; и третий процесс определения внезапного ускорения в случае, если частота вращения резко увеличивается в пределах второго эталонного промежутка времени, когда трансмиссия перемещается из стояночного положения в положение движения, и блокирующий двигатель и активизирующий тормозную систему.
Для выполнения вышеописанных целей, представленное изобретение также предоставляет способ для предотвращения внезапного ускорения транспортного средства, включающий первый процесс определения, наличия изменения положения трансмиссии транспортного средства из стояночного в положение движения после запуска транспортного средства; второй процесс определения, отсутствия внезапного ускорения в случае, если не фиксируется резкое увеличение частоты вращения в пределах первого эталонного промежутка времени, когда первый процесс определяет, что трансмиссия находится в первоначальном стояночном положении, определяющий наличие внезапного ускорения в случае, если резко увеличивается частота вращения, когда входное напряжение акселератора - меньше, чем опорное напряжение, даже в стояночном положении, и блокирующий двигатель и активизирующий тормозную систему; третий процесс определения внезапного ускорения в случае, если резко увеличивается частота вращения в пределах второго эталонного промежутка времени, когда положение трансмиссии перемещается из стояночного в положение движения, и блокирующий двигатель и активизирующий тормозную систему; и четвертый процесс для определения внезапного ускорения из соображений положения трансмиссии, частоты вращения и входного сигнала ускорения в случае, если второй процесс определяет отсутствие внезапного ускорения, и затем определяющий, блокировать или нет двигатель и активизировать или нет тормозную систему.
Для достижения вышеописанных целей, представленное изобретение предлагает другое конструктивное оформление устройства предотвращения внезапного ускорения транспортного средства, включающее датчик частоты вращения для измерения частоты вращения, для определения наличия вращения двигателя и внезапного ускорения; датчик положения трансмиссии для определения изменения положения трансмиссии из стояночного в положение движения; датчик внезапного ускорения, для определения внезапного ускорения, использующий выходные сигналы датчиков частоты вращения и положения трансмиссии, генератор первого синхронизирующего импульса, для генерирования синхронизирующего импульса, в соответствии с выходными сигналами датчика внезапного ускорения; устройство блокировки мощности двигателя, для блокирования подачи питания от батареи к двигателю в соответствии с синхронизирующим импульсом от генератора первого синхронизирующего импульса, тормозное устройство для торможения транспортного средства в соответствии с первым синхронизирующим импульсом от генератора первого синхронизирующего импульса.
Устройство разблокировки тормоза для разблокирования тормозного устройства, когда наблюдается ненормальная работа тормозного устройства, прерывающее подачу питания для питания торможения от батареи к тормозному устройству в соответствии с синхронизирующим импульсом от генератора первого синхронизирующего импульса; и устройство, предотвращающее внезапное торможение, соединенное с устройством, прерывающим подачу питания, и устройством разблокировки тормоза, с целью предотвращения внезапного ускорения, когда транспортное средство двигается.
Эти и другие особенности, виды и преимущества данного изобретения станут более очевидны при рассмотрении следующего описания с добавленными в конце требованиями и сопровождающими иллюстрациями, в которых упомянутые узлы соответствуют ссылающимся на них цифрам. В иллюстрациях:
фиг. 1 - блок-схема, иллюстрирующая устройство для предотвращения внезапного ускорения согласно одному из вариантов конструкции данного изобретения;
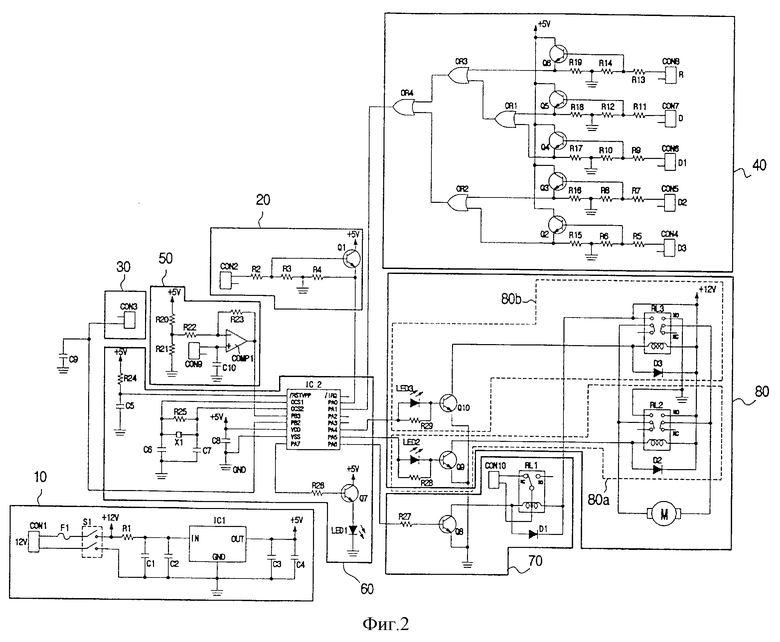
фиг.2, иллюстрирующая детальную схему фиг.1;
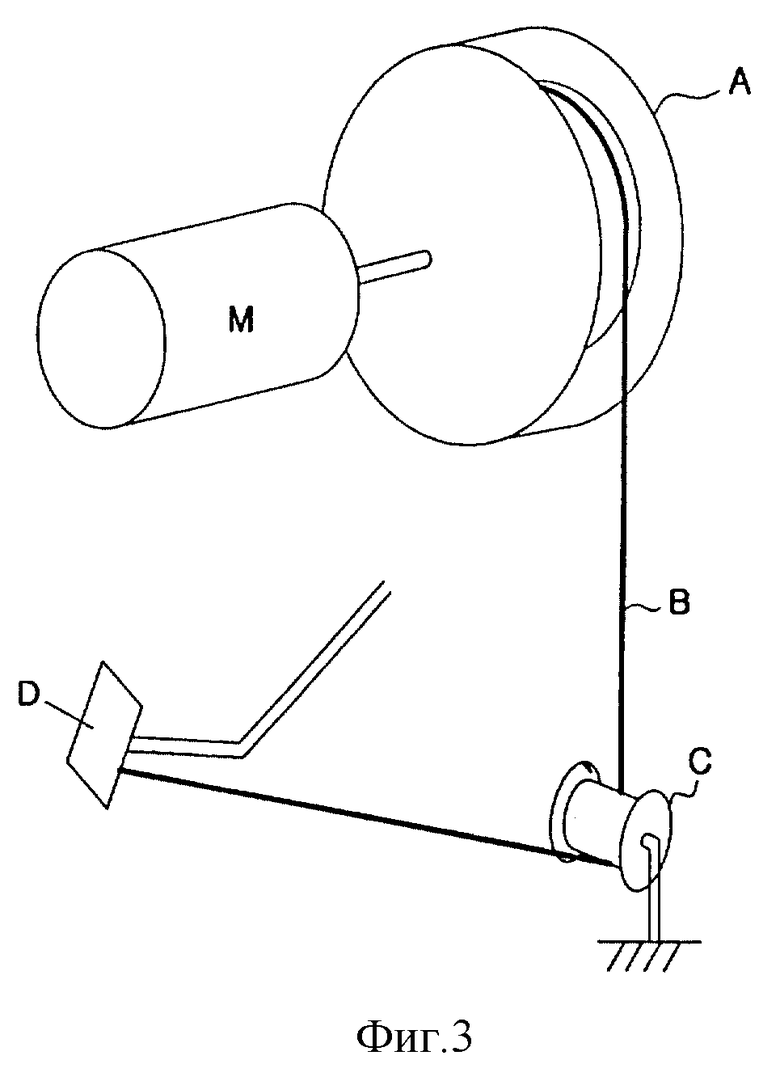
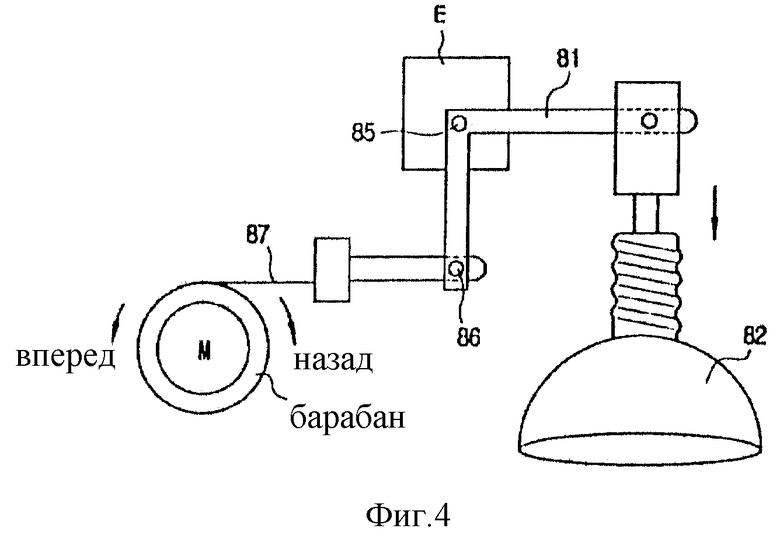
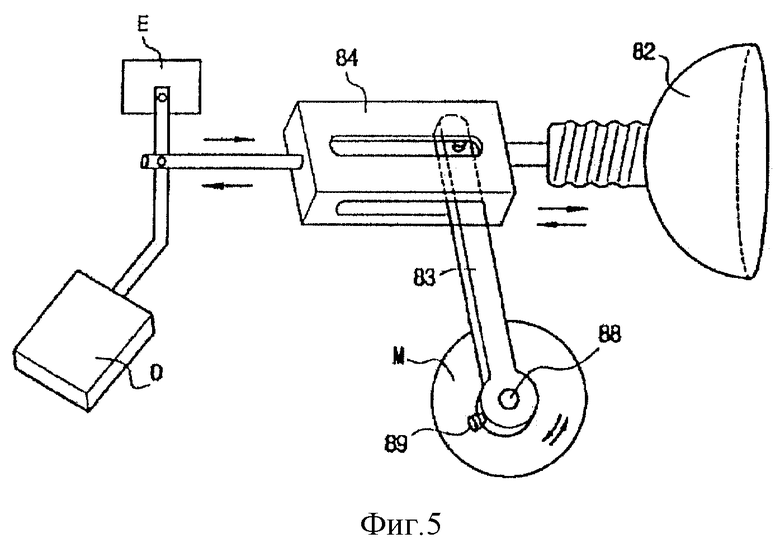
фиг.3, 4 и 5 показывают различные примеры тормозного двигателя в фиг.2;
фиг.6 и 7 - схемы последовательности операций для иллюстрирования общего действия устройства предупреждения внезапного ускорения, предыдущего изобретения;
фиг. 8 и 9 - детальные схемы последовательности операций, иллюстрирующие процесс блокировки тормоза, при включении зажигания и процесс управления в стояночном положении типа N или Р после запуска;
фиг. 10 и 11 - детальные блок-схемы для иллюстрирования процесса управления, когда меняется положение трансмиссии из N или Р в положение D или R после запуска;
фиг. 12 и 13 - детальные блок-схемы для иллюстрирования процесса управления, когда меняется положение трансмиссии в положение D или R, по время движения транспортного средства;
фиг. 14 демонстрирует схему устройства предупреждения внезапного ускорения, согласно другому варианту конструкции данного изобретения; и
фиг. 15 демонстрирует подробную схему блока торможения, представленного на фиг.14.
В дальнейшем, усовершенствованные варианты конструкции данного изобретения будут подробно описаны со ссылками на прилагаемые чертежи.
Фиг. 1 - блок-схема устройства для предотвращения внезапного ускорения, согласно первому варианту конструкции данного изобретения. В соответствии с фиг. 1, устройство состоит из источника питания 10, снабжающего питанием каждый блок устройства, датчика ключа зажигания 20 для обнаружения ключа зажигания в замке, датчика частоты вращения 30 для измерения частоты вращения, датчика положения трансмиссии 40 для определения изменения положения трансмиссии из стояночного (такого как нейтральное положение N, или парковочное положение Р) в положение движения (такого, как положение прямого движения D или положение заднего хода R), датчика АСС 50 для определения ускорения, введенного через педаль управления подачей топлива, контроллер 60 для определения внезапного ускорения на основании информации, введенной устройствами 20, 30, 40 и 50, и затем блокирующее двигатель и активизирующее тормозную систему в соответствии с ее обработкой, устройство прерывания питания двигателя 70 для отключения подачи питания к двигателю с помощью управляющего воздействия контроллера 60, когда происходит внезапное ускорение, и устройство блокировки тормоза 80 для блокирования/разблокирования тормозного двигателя с помощью управляющего воздействия контроллера 60, когда происходит внезапное ускорение.
На фиг. 2 представлена детальная схема каждого устройства. Как показано на фиг. 2, разъем CON1 источника питания 10 подключен к аккумулятору постоянного напряжения 12V, когда включен выключатель IG2. Разъем CON1 также подключен к выключателю источника питания S1 через предохранитель F1, который разрывает цепь в случае перегрузки по току, возникающей при неисправностях в схеме. Выключатель источника питания S1 присоединен к стабилизатору напряжения IС (IC1) для снабжения постоянным напряжением каждого блока в устройстве. Когда выключатель источника питания S1 выключен, схема не работает, так как отсутствует подача питания, что является нормальным состоянием транспортного средства.
Когда выключатель источника питания S1 включен, постоянное напряжение 12V преобразуется в постоянное напряжение 5V и затем подается к каждому контуру через стабилизатор напряжения IC (IC1). Резистор R1 установлен для понижения напряжения с использованием его активного сопротивления для снижения температуры стабилизатора напряжения IC (IC1). Конденсаторы С1-С4 используются для достижения стабильности питания.
Датчик включения замка зажигания 20 передает сигнал, генерируемый, когда ключ зажигания переводится в положение запуска двигателя, к цепи через разъем CON2. Обусловленный разностью напряжений и возможностью повреждения контроллера 60 в случае прямого ввода сигнала к контроллеру 60, датчик включения замка зажигания 20 содержит резисторы R2, R3 для понижения напряжения и транзистор Q1 для коммутации сигнала, который делает сигнал пригодным для ввода к контроллеру 60.
Датчик частоты вращения 30 передает генерируемые импульсы счетчику вращения двигателя контроллеру 60 через разъем CONS. В случае если к импульсам от датчика частоты вращения примешиваются аномальные шумы, в течение предопределенного времени (обычно, 5 секунд) при запуске транспортного средства с холодным двигателем, элемент 30 снижает шумы с использованием конденсатора С9.
Датчик изменения положения трансмиссии 40 выдает сигнал о положении трансмиссии (например, R или D) в цепь через разъемы CON4-CON8 при изменении передачи. Для решения проблем разности напряжений и повреждения контроллера 60, которое может происходить при непосредственном вводе сигнала в контроллер 60, датчик изменения положения трансмиссии 40 понижает напряжение с использованием резисторов R5-R14, коммутирует и подает сигнал к логическим ячейкам OR1-OR3, подавая сигнал на базы транзисторов Q2-Q6 логических ячеек OR1-OR3, выход которой присоединен ко входу логической ячейки OR4, выход которой в зависимости от положения R или D подключен к контроллеру 60. Отсутствие информации относительно положения D или R контроллером 60 воспринимается, как положение трансмиссии R или N.
Датчик АСС 50 фиксирует предопределенный уровень ускорения от акселератора АСС, путем введения сигнала постоянного напряжения от 0 до 5V, через разъем CON9 к не инвертирующему входному соединению (+) компаратора СОМР1, затем подающего обнаруженный сигнал к контроллеру 60.
В датчике АСС 50 также присутствует конденсатор С10 для снижения шума.
Контроллер 60 включает в себя таймер (65,5 msec) для считывания числа оборотов в минуту. Используя счетчик, контроллер 60 определяет наличие внезапного ускорения в случае, если частота вращения резко увеличивается в пределах предопределенного времени (например, 5 секунд) при условии, что трансмиссия находится в N или Р и педаль управления подачей топлива нажата недостаточно для того, чтобы получить заданную частоту вращения (например, 4200 оборотов в минуту), то есть выходное напряжение датчика АСС 50 - меньше, чем заданное напряжение (например, 1.0V), после включения ключа зажигания. Контроллер 60 также определяет наличие внезапного ускорения в случае, если частота вращения резко увеличивается в пределах предопределенного времени (например, 3 секунды) при фиксировании переключения передачи из D или R в течение заданного времени (например, 5 секунд) после включении ключа зажигания. Лучше, контроллер 60 определяет наличие внезапного ускорения, если частота вращения достигает от 2400 оборотов в минуту до 4200 оборотов в минуту в пределах 1,2 секунд. При движении транспортного средства, контроллер 60 не фиксирует частоту вращения, кроме случая переключения передачи из N или Р в D или R. В таком случае, контроллер 60 фиксирует внезапное ускорение, повторно считывая число оборотов в течение предопределенного времени (например, 3 секунды) при определении переключения передачи из N или Р в D или R. В это время, микропроцессор IС2 контроллера 60 получает выходные сигналы датчика ключа зажигания 20, датчика частоты вращения 30, датчика положения трансмиссии 40 и датчика АСС 50 через каналы ввода РАО, РВ2, РА1, РВ3. Микропроцессор IС2 также вырабатывает управляющие сигналы для блокирования подачи питания к двигателю и блокирования/разблокирования тормоза через каналы вывода РА4-РА6. Используя управляющие сигналы, контроллер 60 управляет устройством блокировки подачи питания к двигателю 70 и устройством блокировки тормоза 80 и индицирует их состояние при помощи светодиода LED1 в случае их блокировки. То есть светодиод LED1 служит для индикации нормальной работы устройства и загорается в течение предопределенного времени при запуске или переключении передачи.
Кроме того, контроллер 60 использует выходной сигнал датчика АСС 50, чтобы определить внезапное ускорение следующим образом.
Выходное напряжение акселератора фиксируется в диапазоне от 0,2 до 5V в блоке управления двигателем (БУД), которое пропорционально нажатию на педаль управления подачей топлива. Внезапное ускорение может происходить без нажатия на педаль управления подачей топлива после запуска транспортного средства, но в некоторых случаях, водитель может нажимать на педаль управления подачей топлива в большей или меньшей степени после того, как внезапное ускорение произошло.
В таком случае, непреднамеренное внезапное ускорение и ускорение, задаваемое водителем, происходит практически в одно и то же время, хотя может присутствовать разница во времени.
В данном случае, для отличия редкого возрастания частоты вращения инициируемой задачей ускорения водителем или непреднамеренного внезапного ускорения, может быть учтено пропорциональное соотношение между выходным напряжением акселератора и частотой вращения двигателя.
Выходное напряжение акселератора при достижении 4200 оборотов в минуту может достигать 1.0V. На основании выходного напряжения акселератора 1.0V, педаль управления подачей топлива нажата приблизительно на 50-60%, необходимых для достижения 4200 оборотов в минуту. Максимальная частота вращения двигателя - при напряжении 1.0V 4200 оборотов в минуту и 6000 оборотов в минуту при 1.43V. Таким образом, если увеличение частоты вращения фиксируется совместно с выходным напряжением акселератора 1.0V, ускорение рассматривается как задаваемое водителем. Однако если имеется значительный интервал времени между обнаружением выходного напряжения акселератора и возрастания частоты вращения двигателя, это может быть рассмотрено как внезапное ускорение.
Поэтому, увеличение частоты вращения двигателя пропорционально и соответственно выходному напряжению педали управления подачей топлива рассматривается как преднамеренное ускорение, что является нормальным состоянием при движении. Однако, если частота вращения двигателя и выходное напряжение педали управления подачей топлива возрастают с временным интервалом или частота вращения двигателя возрастает даже без нажатия на педаль управления подачей топлива, контроллер 60 фиксирует наличие внезапного ускорения и затем блокирует двигатель и активизирует тормозную систему.
Контроллер 60 может определять внезапное ускорение другим образом. После запоминания разнообразных сочетаний выходного напряжения акселератора в отдельной программируемой интегральной схеме IC, контроллер 60 сравнивает эти напряжения с входным сигналом датчика частоты вращения 30. Если они пропорциональны, контроллер 60 распознает эту ситуацию как нормальную, в то время как если они не пропорциональны или имеют разность во времени, контроллер 60 распознает наличие внезапного ускорения. В этом случае распознавание контроллера должно основываться на частоте вращения 4200 об/мин. Это связано с тем, что при внезапном ускорении частота вращения достигает, по крайней мере, 4200 об/мин.
Устройство блокировки подачи питания к двигателю 70 содержит транзистор Q8, открывающийся, когда контроллер 60 выдает управляющий сигнал о блокировании двигателя, и реле RL1 для блокировки подачи питания к двигателю, когда транзистор Q8 открывается. Если контроллер распознает внезапное ускорение и выдает управляющий сигнал блокировки двигателя на выходной порт РА6 в заданном промежутке времени (около 3 секунд), который затем подается на базу транзистора Q8 через резистор R27, при этом транзистор открывается. При этом постоянное напряжение 12V поступает на катушку реле RL1, контакт NC замыкается и питание, подаваемое на двигатель, блокируется, что тормозит двигатель. На чертеже диод D1 служит для предотвращения обратного тока, а разъем CON10 - для подключения к двигателю.
В устройстве блокировки прерывания подачи питания 80 имеется моторный блок, который содержит двигатель М для торможения транспортного средства, а также устройство подачи питания блокировки 80А, питающее схему блокировки тормозного двигателя М в соответствии с управляющим сигналом блокировки торможения от контроллера 60, а также устройство подачи питания разблокировки 80В, питающее схему разблокировки тормозного двигателя М в соответствии с управляющим сигналом разблокировки торможения от контроллера 60.
Устройство подачи питания блокировки 80А содержит транзистор Q9, который включается в соответствии с управляющим сигналом блокировки тормоза, вырабатываемым контроллером 60 во время внезапного ускорения, а также реле RL2 для блокировки тормозного двигателя М путем подачи напряжения прямой полярности к нему, когда транзистор Q9 открыт. Устройство подачи питания разблокировки 80В содержит транзистор Q10, который включается, когда контроллер 60 выдает управляющий сигнал разблокирования тормозного мотора М, а также реле RL3 для разблокировки тормозного мотора М путем подачи напряжения обратной полярности к нему, когда транзистор Q10 открыт. Светодиоды LED2, LED3 установлены для индикации подачи контроллером управляющих сигналов блокировки и разблокировки торможения.
Кроме того, тормозной мотор М устройства блокировки тормоза 80 может быть моторедуктором (редукторным двигателем) (30 об/мин). Моторный блок, который содержит тормозной двигатель М, сконструирован так, что стальная проволока В, присоединенная к тормозной педали D, через ролик С, смонтированный на полу кузова Е автомобиля, наматывается на барабан А, имеющий цилиндрическую пластину на валу тормозного мотора М, так как показано на фиг.3. Желательно чтобы барабан А имел диаметр 4,2 см и длину внутренней окружности 13,85 см. Когда управляющий сигнал блокировки тормоза поступает от контроллера в случае внезапного ускорения, тормозной мотор М вращается в течение заданного интервала времени (например, 1,5 секунды), наматывая стальную проволоку В на барабан А, затем останавливается на заданный интервал времени (например, 0,5 секунды) и далее вращается в обратную сторону, отматывая стальную проволоку, что приводит к разблокировке тормоза.
Если контроллер 60 распознает внезапное ускорение и выдает управляющий сигнал блокировки тормоза на выходной порт РА5 в течение заданного времени (приблизительно, 1,5 секунды), то в устройстве блокировки прерывания подачи питания 80, через резистор R28 приходит сигнал на базу транзистора Q9, открывающий его. Вследствие этого постоянное напряжение 12V подается транзистором Q9 на катушку реле RL2, при этом оно переключается в положение NO, при котором к тормозному двигателю М подается напряжение прямой полярности. Таким образом, тормозной двигатель М, запитанный постоянным напряжением 12V, наматывает стальную проволоку В, тем самым втягивая педаль тормоза D и блокируя тормоз. После заданного интервала времени, контроллер 60 прекращает вырабатывать управляющий сигнал блокировки тормоза. То есть контроллер 60 понижает выходной сигнал порта РА5.
Кроме того, порт вывода РА4 через резистор R29 выдает управляющий сигнал разблокировки тормоза, открывающий транзистор Q10. Когда транзистор Q10 открывается, постоянное напряжение 12V подается на катушку реле RL3, переключая его в положение NO. Тогда реле RL3 подает напряжение (12V постоянного тока) обратной полярности к тормозному двигателю М так, что стальная проволока В отматывается и педаль тормоза D возвращается в исходное положение.
Кроме того, возможна иная конструкция моторного блока, в которой устройство блокировки тормоза 80 воздействует на гидравлический тормоз при помощи моторедуктора (понижающего двигателя), для улучшения его внешнего вида за счет устранения внешних стальных проволочных тяг. В таком варианте конструкции может быть применен электрический способ автоматического управления, показанный на фиг.5.
Вернемся к фиг. 4, когда тормозной двигатель М вращается вперед, звено 81, шарнирно закрепленное на кузове Е транспортного средства, воздействует на гидравлический тормоз 82 в направлении, указанном стрелкой, тормозя транспортное средство. При этом стальная проволока 87 подтягивается и затем наматывается на барабан тормозным двигателем М. Когда приводной электродвигатель М вращается назад, гидравлический тормоз 82 двигается в противоположном стрелке направлении, разблокируя тормоз. Неупомянутой выше цифрой 86 обозначен соединительный палец. Обращаясь к фиг.5, на которой при вращении тормозного двигателя М, тяга 83, шарнирно присоединенная к валу 88 тормозного двигателя М, двигается вправо в пазу, выполненном по длине направляющей 84, нажимая гидравлический тормоз 82 для его блокировки (тем самым подтормаживая). Когда тормозной двигатель М вращается назад, тяга 83 двигается в пазу направляющей 84, отпуская гидравлический тормоз 82, для его разблокировки (тем самым растормаживая его). Не упомянутой выше цифрой 89 обозначен винт фиксации вала.
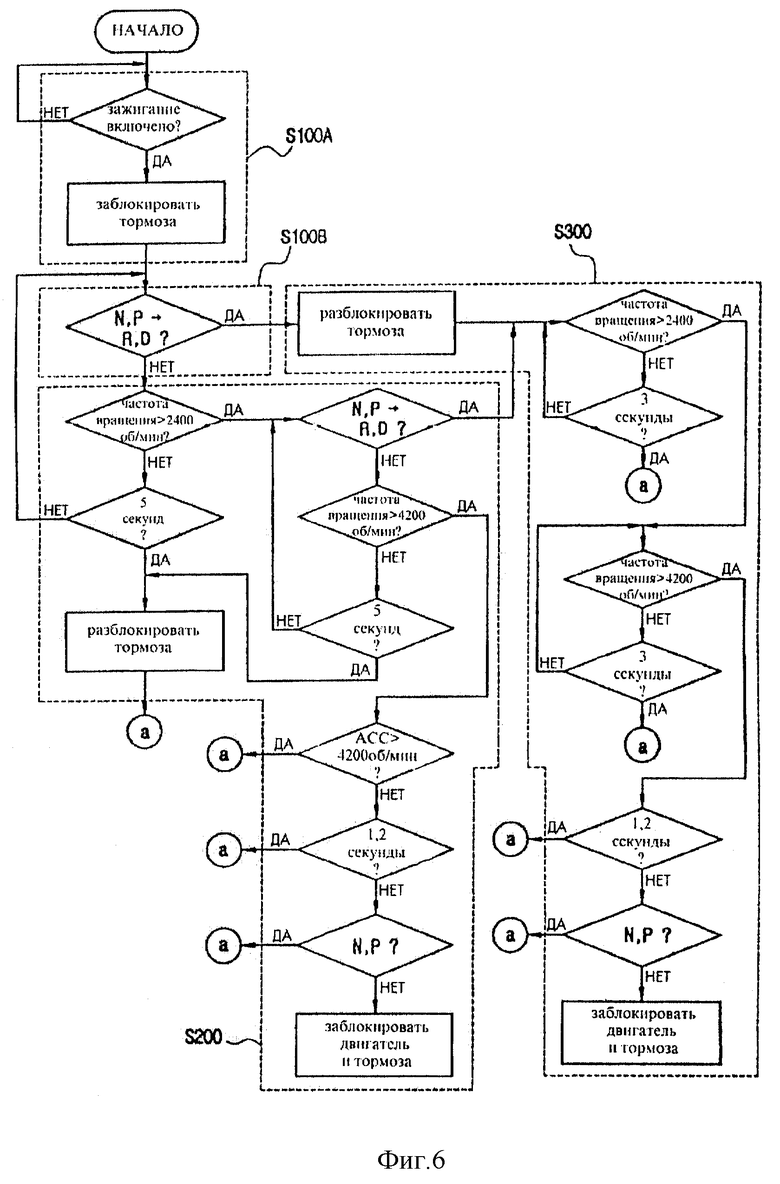
На фиг. 6 и фиг.7 изображен алгоритм способа предотвращения внезапного ускорения представленного изобретения. Как показано на чертежах, структура алгоритма способа состоит из блока блокировки при запуске ключа зажигания S100A, блока определения изменения передачи трансмиссии из N или Р в D или R при запуске ключа зажигания S100B, блока контроля положения трансмиссии N или Р при старте транспортного средства S200, блока контроля изменения положения трансмиссии из N или Р в D или R после старта транспортного средства S300 и блока контроля изменения положения трансмиссии в D или R во время движения транспортного средства S400.
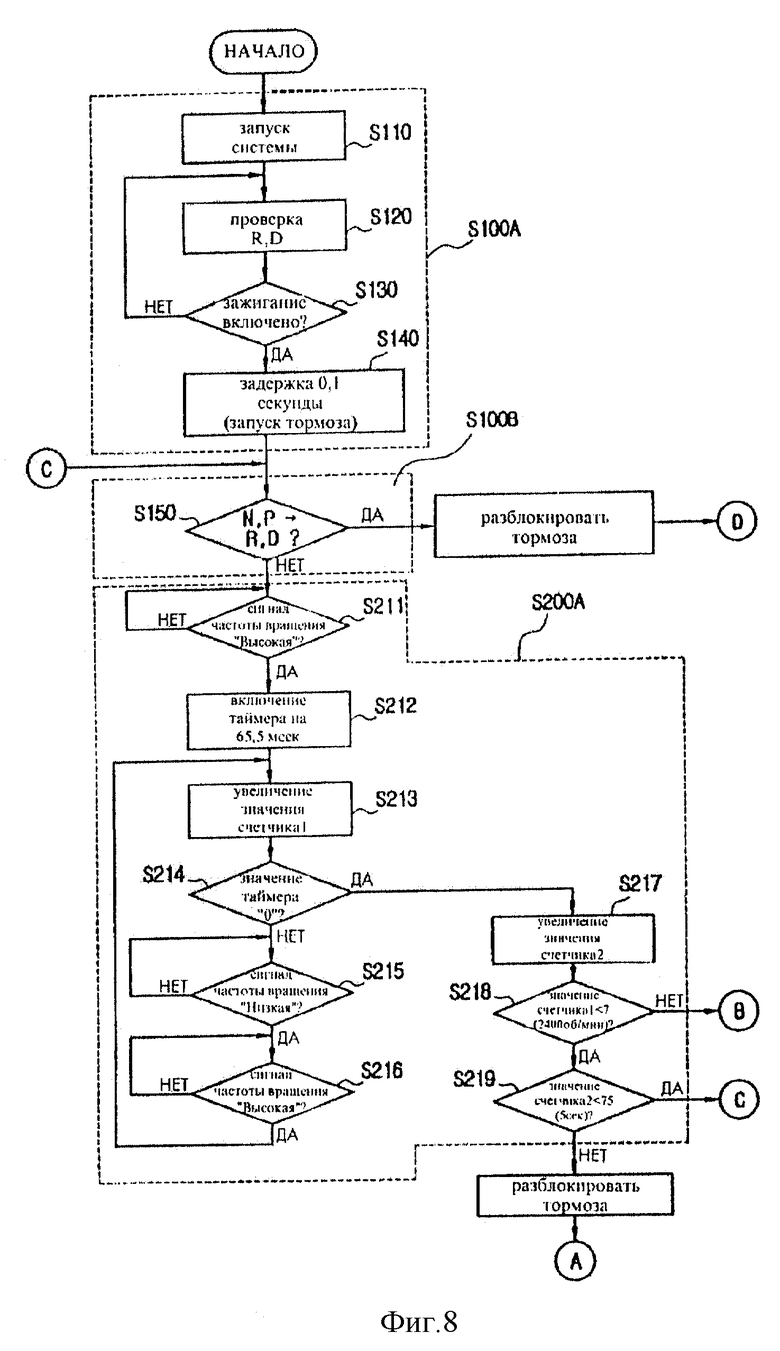
Блок S100A, как показано на фиг. 8, содержит блоки запуска системы (таймер и все счетчики) S110, контроля нахождения трансмиссии в положении D или R S120, включения ключа зажигания S130, задержки включения ключа зажигания (на 0,1 секунды) для предотвращения ошибок в системе при его включении и блокирования тормоза S140. В данном случае, блокировка тормоза служит для предотвращения самопроизвольного движения транспортного средства (без водителя). Поэтому, в представленном изобретении возможна функция автоматического включения блокировки тормоза, при отсутствии воздействия на него водителем.
Блок S200, представленный в подробностях на фиг.8 и фиг.9, содержит блоки проверки частоты вращения 2400 об/мин S200A, частоты вращения в 4200 об/мин S200B и блокировки двигателя S200C.
Блок проверки частоты вращения 2400 об/мин S200A содержит блоки S211 определения сигнала частоты вращения "Высокая" при трансмиссии, включенной в положение N или Р, после определения, что происходит переключение трансмиссии из N или Р в D или R, S212 включения таймера (65,6 msec) контроллером 60, в случае сигнала частоты вращения "Высокая", и увеличения значения, рассчитываемого счетчиком COUNT1, S213 подсчета импульсов частоты вращения. Затем, блок S200A переходит к блокам S214 проверки соответствия показателя таймера нулевому, а при по нулевом значении таймера к блокам S215, 216 определения, является ли сигнал частоты "Высоким" или "Низким", и S213 увеличения значения счетчика COUNT1, когда сигнал частоты вращения попадает в интервал от "Низкого" до "Высокого". В случае, если значение таймера является нулевым на блоке S214, блок проверки частоты вращения 2400 об/мин S200A выполняет блок S217 увеличения значения счетчика COUNT2, который рассчитывает значение первого эталонного интервала времени (например, 5 секунд). Первый эталонный интервал времени предварительно задается в контроллер 60 для определения внезапного ускорения. Представленное изобретение содержит таймер на 65,5 msec, который за 5 секунд производит 75 подсчетов. Поэтому, счетчик COUNT2 установлен для подсчета 75 раз в течение 5 секунд. Затем, блок S200A продолжает блоки проверки, S218 достижения счетчиком COUNT1 частоты вращения 2400 об/мин, сравнивая значение счетчика COUNT2 с величиной первого эталонного интервала времени (75: в дальнейшем будет упоминаться только первый эталонный интервал времени), когда значение счетчика COUNT1 меньше, чем 2400 об/мин S219, а если значение счетчика COUNT2 больше, чем первый эталонный интервал времени, разблокирует тормоз, заблокированный на шаге S100A.
В этом случае, счетчик COUNT1 служит для подсчета частоты вращения 2400 оборотов в минуту и 4200 оборотов в минуту, для распознания внезапного ускорения, счетчик соотносит 7 импульсов с частотой 2400 об/мин и 10 импульсов с частотой 4200 об/мин.
Эти 7 импульсов, соответствующие 2400 об/мин, и 10 импульсов, соответствующие 4200 об/мин, описаны более подробно. В связи с тем, что представленное изобретение содержит в контроллере 60 таймер на 65,5 msec, для определения частоты вращения, число импульсов, соответствующих 2400 об/мин и 4200 об/мин за 65,5 msec в действительности равняется 6 и 9 соответственно. На самом деле представленному изобретению необходимо время для достижения частоты вращения 2400 об/мин и 4200 об/мин, причем 7
импульсов соответствуют моменту достижения 2400 об/мин, а 10 импульсов - моменту достижения 4200 об/мин и используются для распознания внезапного ускорения.
Если показания счетчика COUNT1 не меньше 7, что соответствует 2400 об/мин, блок S200A переходит к блоку S200B проверки частоты вращения 4200 об/мин, в то время как, в случае если показания счетчика COUNT2 - меньше, чем первый эталонный интервал времени, блок проверки частоты вращения 2400 об/мин S200A повторяется.
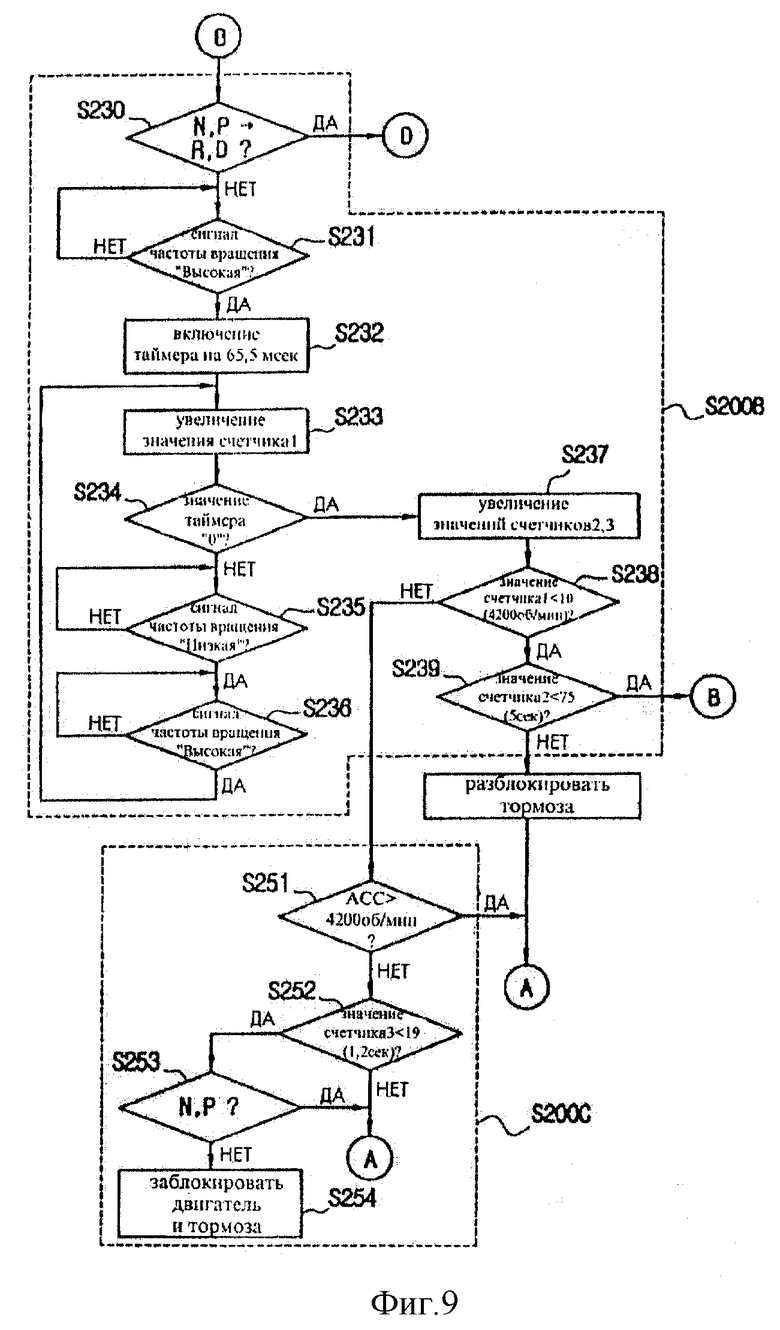
Блок проверки частоты вращения 4200 об/мин S200B содержит блок S230 определения изменения положения трансмиссии из N или Р в D или R, и блок S231 определения сигнала частоты вращения "Высокая" при положении трансмиссии N или Р. Если сигнал частоты вращения "Высокая", контроллер 60 включает таймер (65,5 msеc) S232 и увеличивает значения счетчика COUNT1 S233. Тогда, блок S200B выполняет блок определения нулевого значения таймера S234, блок определения сигнала частоты вращения "Высокий" или "Низкий", в случае ненулевого значения счетчика S235, S236, и затем блок увеличения значения счетчика COUNT 1, если сигнал частоты вращения попадает в интервал от "Низкого" до "Высокого" S233. Данная процедура подобна блоку S200A проверки частоты вращения 2400 об/мин.
Кроме того, если показания таймера становятся пулевыми, блок S200B увеличивает значения счетчика COUNT2 и счетчика COUNT3, производящего расчет величины, соответствующей третьему эталонному промежутку времени (1,2 секунды) S237. Третий эталонный интервал времени задается в контроллер 60 предварительно, для определения внезапного ускорения в случае, если резко увеличивается частота вращения. Так как данное изобретение содержит таймер на 65,5 msec, за 1,2 секунды он должен производить подсчет 19 раз. Следовательно, счетчик COUNT3 должен насчитать эти 19 раз при достижении 1.2 секунды. Затем блок S200B переходит к блокам сравнения значения счетчика COUNT1 с 10 импульсами, соответствующими 4200 об/мин S238, и сравнению показания счетчика COUNT2 с первым эталонным промежутком времени, если показания счетчика COUNT1 меньше 10 S239. Если показания счетчика COUNT2 меньше первого эталонного интервала времени, то блок S200B проверки частоты вращения 4200 об/мин повторяется. Если показания счетчика COUNT2 не меньше первого эталонного интервала времени, тормоз, заблокированный на блоке S100A, разблокируется.
Если показания счетчика COUNT1 не меньше 10 импульсов, соответствующих 4200 об/мин, алгоритм выполняет блок торможения двигателя S200C. Блок S200C содержит блок, определяющий, достигла ли педаль акселератора степени нажатия, превышающей частоту вращения 4200 об/мин S251. Другими словами блок S251 определяет, превысило ли выходное напряжение датчика АСС 50 1.0V, соответствующее частоте вращения 4200 об/мин. Если степень нажатия на педаль такова, что частота вращения больше 4200 об/мин, тогда блок S251 переходит к блоку S400. Если же степень нажатия на педаль недостаточна для достижения частоты вращения 4200 об/мин, блок S200C выполняет сравнения значения счетчика COUNT3 с третьим эталонным промежутком времени (19 - в дальнейшем упоминается как третий эталонный интервал времени) блока S252.
Если значение счетчика COUNT3 оказывается в результате сравнения больше третьего эталонного интервала времени, блок S252 переходит к блоку S400. Если значение счетчика COUNT3 меньше третьего эталонного интервала времени, блок S200C выполняет блок S253 определения, соответствия положения трансмиссии передаче N или Р, блок S254 торможения двигателя и блокировки тормоза, если трансмиссия находится не в положении N или Р. Если трансмиссия находится в положении N или Р, блок S253 переходит к блоку S400.
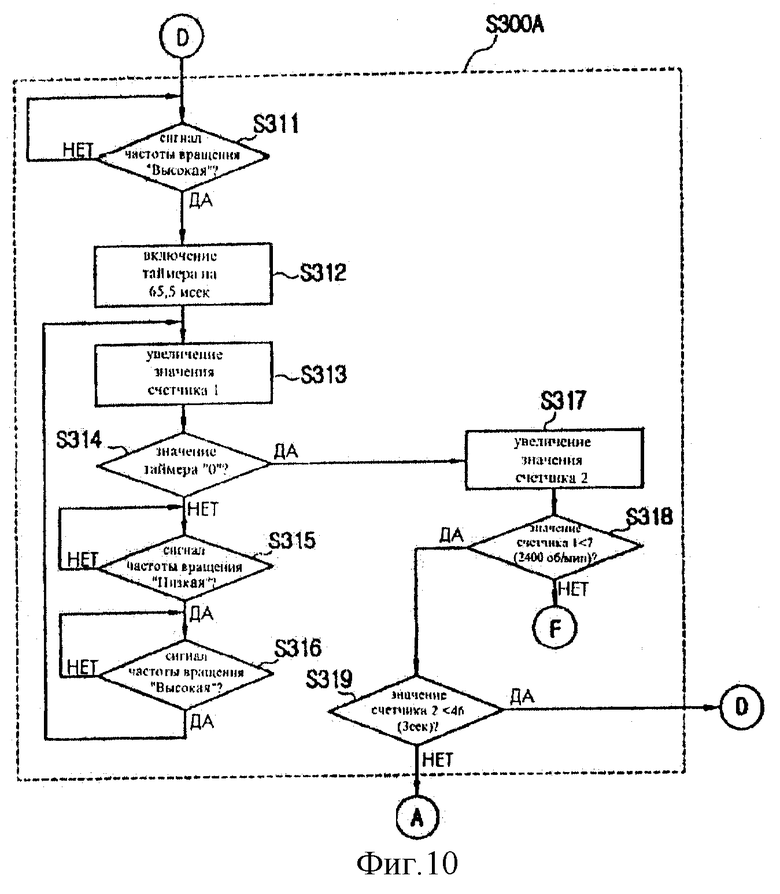
На фиг. 10 и фиг.11 показаны алгоритмы для пояснения блока S300. После определения блоком S200 переключения трансмиссии из N или Р в D или R и разблокировки тормоза, заблокированного на блоке S100A, блок S300, в случае переключения трансмиссии в положение D или R, выполняет блоки S300A проверки частоты вращения 2400 об/мин, S300B проверки частоты вращения 4200 об/мин и блокировки двигателя S300C.
Блок S300A проверки частоты вращения 2400 об/мин проверяет эту частоту вращения в случае переключения трансмиссии в D или R. Блок S300A не описывается подробно, так как он идентичен блоку S200A за исключением того, что второй эталонный интервал времени, предварительно заданный в контроллер 60 для определения внезапного ускорения, в случае переключения трансмиссии в положение движения D или R - 3 секунды. На блоке проверки частоты вращения 2400 об/мин S300A счетчик COUNT2 производит подсчет импульсов длительностью 65,5 msec в течение 3 секунд (приблизительно 46).
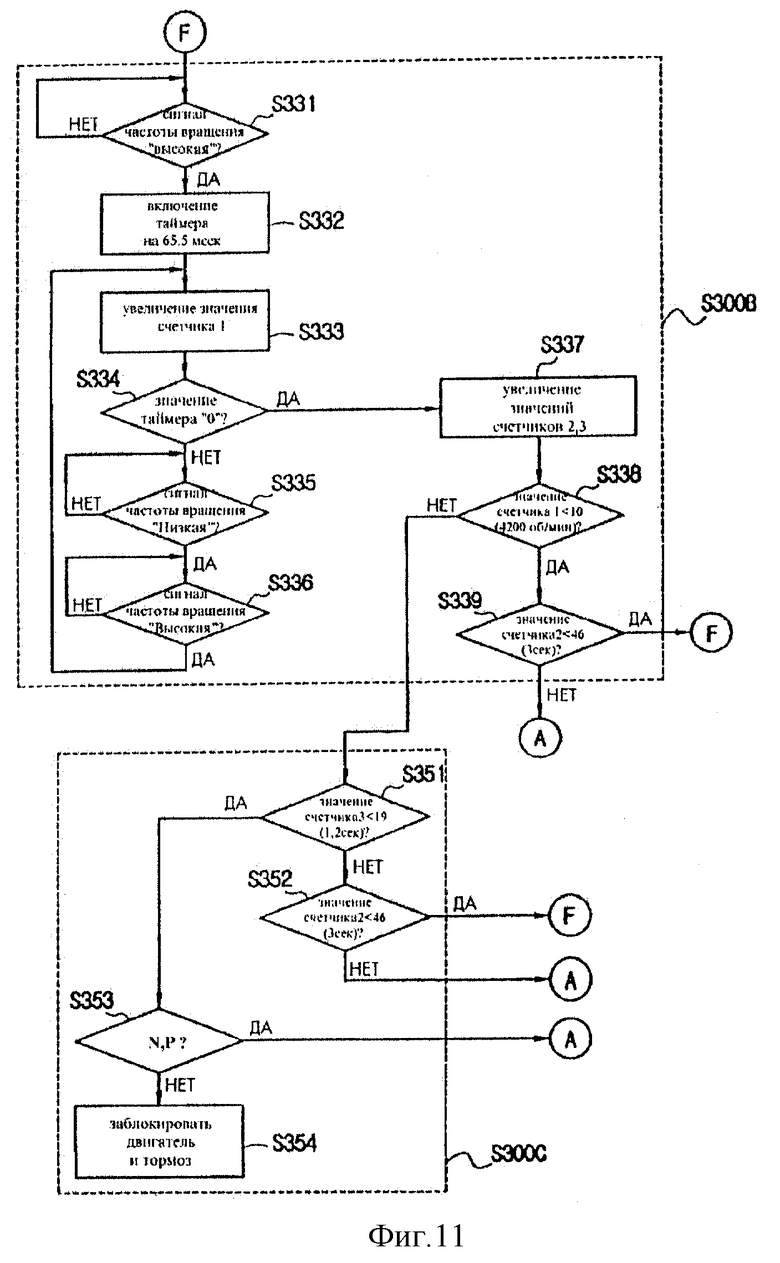
Блок проверки частоты вращения 4200 об/мин S300B служит для проверки этой частоты вращения в случае переключения трансмиссии в D или R. Блок проверки частоты вращения 4200 об/мин S300B также идентичен блоку S200B за исключением того, что второй эталонный интервал времени - 3 секунды, и следовательно не описывается подробно.
Выполнение блока блокировки двигателя S300C происходит, когда показания счетчика COUNT1 превышают значение (10 импульсов), соответствующее 4200 об/мин. Блок S300C содержит блоки: S351 сравнения показаний счетчика COUNT3 с третьим эталонным промежутком времени, и в случае превышения ими третьего эталонного интервала времени, S352 сравнения показаний счетчика COUNT2 со вторым эталонным промежутком времени. Если показания счетчика COUNT2 превышают второй эталонный интервал времени, блок S350 переходит к блоку S400. Если показания счетчика COUNT2 меньше второго эталонного интервала времени, то повторяется блок S300B проверки частоты вращения 4200 об/мин.
Кроме того, если показания счетчика COUNT3 меньше третьего эталонного интервала времени, блок S300C определяет соответствие трансмиссии положению N или Р S353, и в случае если трансмиссия не находится в одном из этих положений - тормозит двигатель и блокирует тормоз S354, в ином случае переходит к блоку S400.
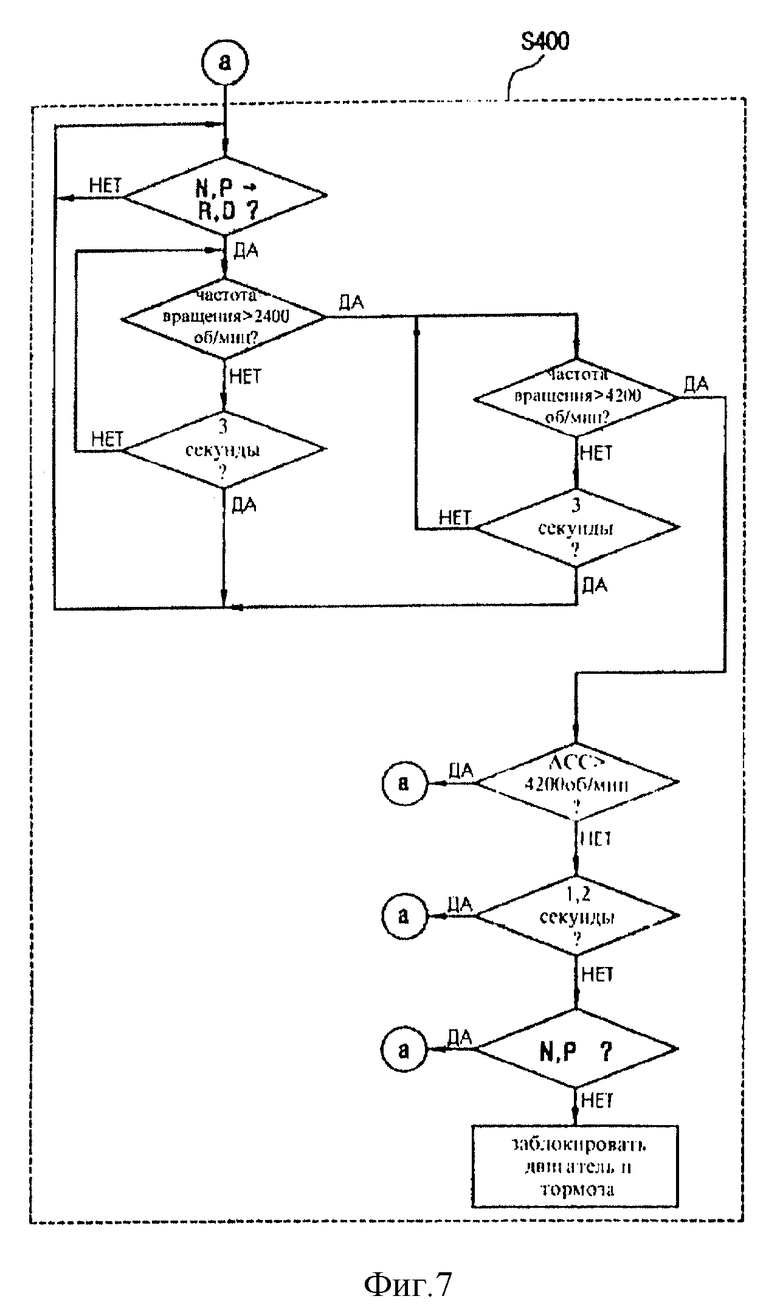
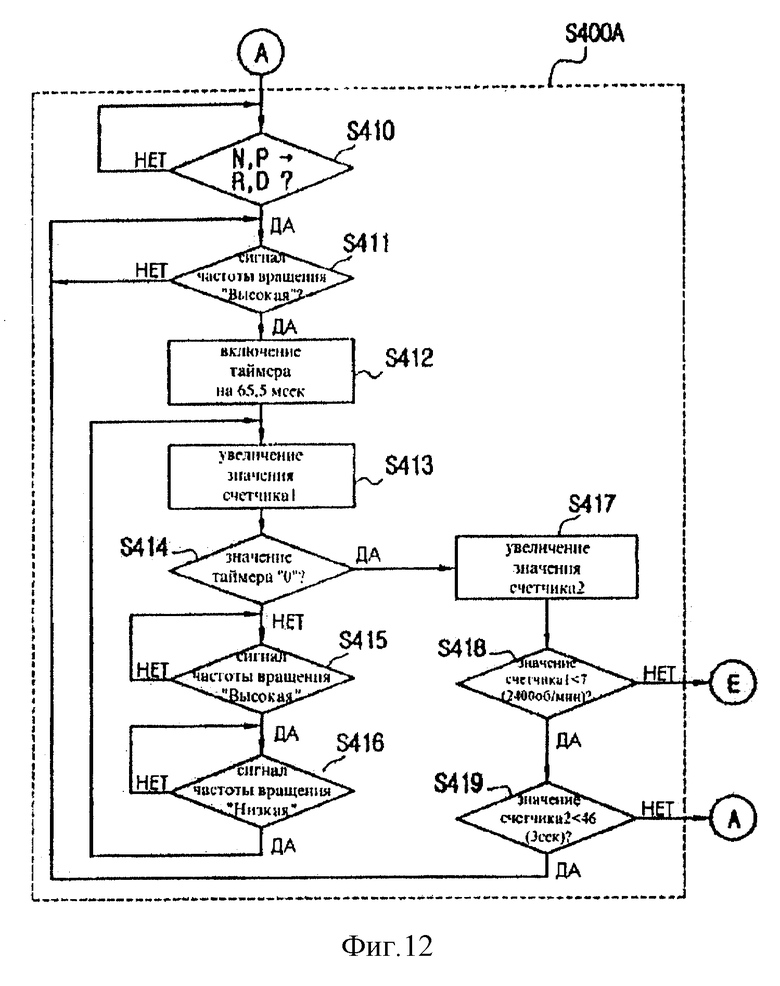
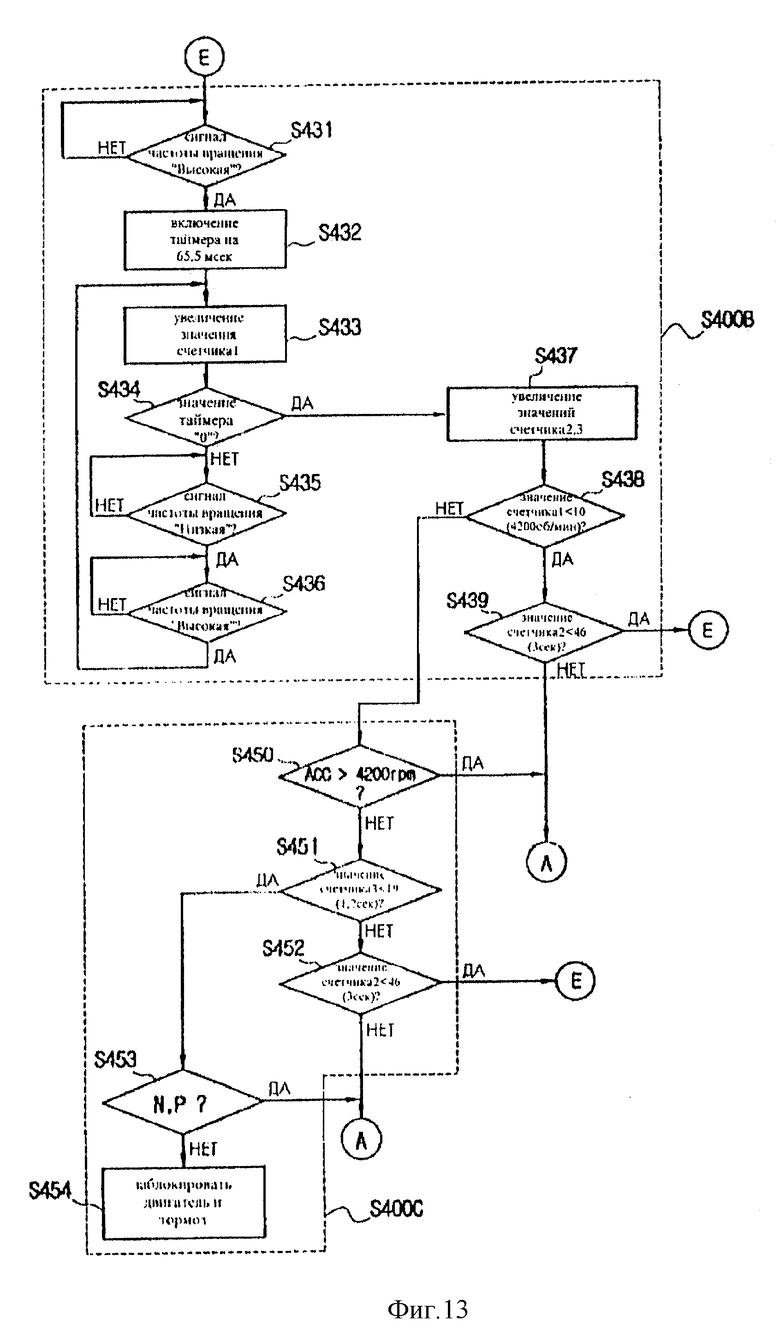
Блок алгоритма, применяющийся при движении транспортного средства, в режиме переключения трансмиссии из положения D или R, S400 показан на фиг.12 и фиг.13. Как показано на чертежах, блок S400 подобно блоку S300 содержит блоки проверки частоты вращения 2400 об/мин S400A, проверки частоты вращения 4200 об/мин S400B и торможения двигателя S400C.
Блок проверки частоты вращения 2400 об/мин S400A контролирует переключение трансмиссии из N или Р в D или R S410, и если оно происходит, выполняет ту же самую процедуру, что и блок S300A.
Блок проверки частоты вращения 4200 об/мин S400B идентичен блоку S300B и не описывается подробно. Блок торможения двигателя S400C по сравнению с блоком S300C содержит дополнительный блок определения нажатия акселератора вне заданных границ (уровня). Если блок проверки частоты вращения 4200 об/мин S400B распознает, что показания счетчика COUNT1 превышают значение, соответствующее 4200 об/мин (10), то происходит переход к блоку алгоритма S400C, содержащему блок S450 определения, нажата ли педаль больше, чем требуется для достижения частоты вращения 4200 об/мин, что соответствует выходному напряжению датчика АСС 50 - не меньше, чем 1.0V. Если педаль акселератора нажата больше, чем требуется для достижения частоты вращения 4200 об/мин, то повторяется блок проверки частоты вращения 2400 об/мин S400A. Если педаль акселератора нажата меньше, чем требуется для достижения частоты вращения 4200 об/мин, блок S400C выполняют ту же самую процедуру, что и блок торможения двигателя S300C.
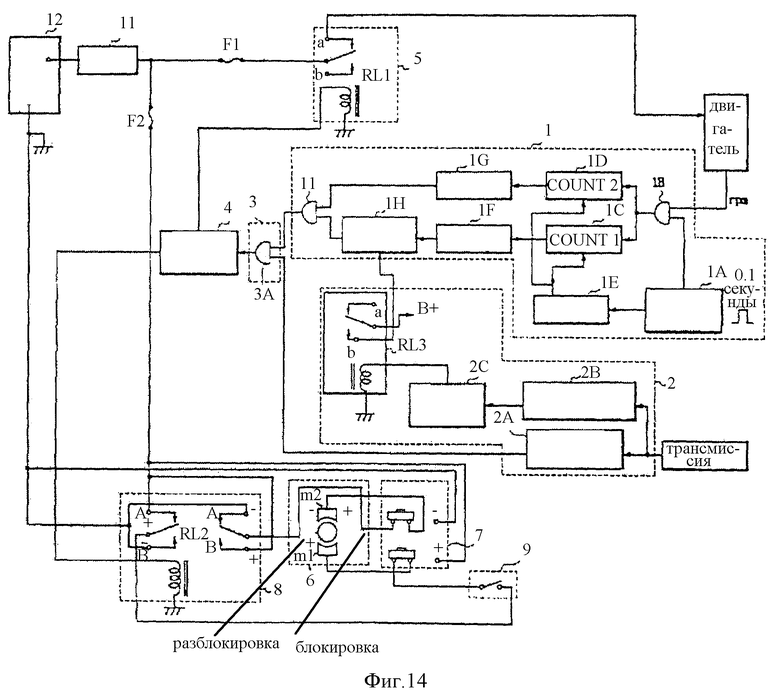
На фиг. 14 приведена структурная схема, демонстрирующая второй вариант конструкции устройства для предотвращения внезапного ускорения.
Как показано на фиг.14, второй вариант конструкции устройства содержит: устройство определения частоты вращения 1, для определения работы двигателя, а также для определения частоты вращения двигателя для распознавания внезапного ускорения, устройство определения положения трансмиссии 2 для определения текущего положения трансмиссии и определения переключения трансмиссии из стояночного положения Р или N в положение движения D или R, блок детектирования внезапного ускорения 3, представляющий собой логическую ячейку 3А для распознания внезапного ускорения, согласно текущим значениям выходных сигналов устройства определения частоты вращения 1 и устройства определения положения трансмиссии 2, и генератор импульсов времени 1-4 для задания времени (например, 3 секунды) согласно выходному сигналу блока детектирования внезапного ускорения 3.
Кроме того, устройство содержит блок торможения двигателя 5, содержащий реле для прерывания питания от батареи 12 к двигателю, когда первый генератор импульсов времени 4 генерирует импульс времени. Реле RL1 имеет катушку, подсоединенную к первому генератору импульсов времени 4, контакты реле, соединенные с батареей 12 через предохранитель F1 и замок зажигания 11. Устройство также содержит блок торможения 6 для торможения транспортного средства, когда первый генератор импульсов времени 4 формирует временной импульс, блок разблокировки тормоза 7, подключаемый к блоку торможения 6 и батарее 12 для разблокировки блока торможения 6, когда наблюдаются нарушения в его работе в связи с неисправностями схемы, и блок питания торможения 8, содержащий реле RL2 для подвода питания с целью приведения в действие блока торможения 6, когда первый генератор импульсов времени 4 формирует временной импульс. Обмотка реле RL2 подсоединена к первому генератору импульсов времени 4, а контакты реле соединены с блоком торможения 6 и блоком предотвращения внезапного ускорения 9, описанным ниже. Устройство также снабжено блоком предотвращения внезапного ускорения 9, соединенным с реле RL2, и блоком разблокировки тормоза 7 для предотвращения внезапного ускорения при движении транспортного средства. Блок предотвращения внезапного ускорения 9 имеет нормально разомкнутый кнопочный выключатель, который выключается, когда водитель нажимает на педаль акселератора до заданного положения. Желательно, чтобы кнопочный выключатель выключался, когда частота вращения двигателя достигнет 4000 об/мин. Кнопочный выключатель крепится к тыльной стороне педали акселератора.
Устройство определения частоты вращения I содержит: второй генератор импульсов времени 1А, генерирующий временные импульсы для цели подсчета импульсов частоты вращения, логическую ячейку 1В (схема "И") для перемножения текущих значений выходных сигналов устройства определения частоты вращения 1 и второго генератора импульсов времени 1А, первый и второй счетчики 1С, 1D, присоединенные к выходу логической ячейки 1В для измерения частоты вращения генерируемой, когда импульс второго генератора импульсов времени 1А "Высокий", устройство сброса 1Е для обнуления первого и второго счетчиков 1С, 1D по каждому переднему фронту импульса времени от второго генератора импульсов времени 1А, первый и второй датчики 1P, 1G, соединенные с первым и вторым счетчиками 1С, 1D для распознания заданной частоты вращения (например, 600 об/мин и 4200 об/мин), генератор импульса задержки 1Н для задержки выходного сигнала первого датчика 1P в течение заданного времени (например, 2,5 секунды), для синхронизации выходных сигналов первого и второго датчиков 1F, 1G, и логическая ячейка 1Н (схема "И") для выполнения функции логического умножения выходных сигналов генератора импульсов задержки и второго детектора 1G.
Устройство определения положения трансмиссии 2 содержит датчик положения трансмиссии 2А для определения соответствия трансмиссии положению D или R, датчик переключения трансмиссии 2В, для обнаружения переключения трансмиссии из Р или N в D или R, выдающий сигнал при переключении из Р или N в D или R, третий генератор импульса времени 2С, для генерирования импульсов времени в течение заданного времени (например, 5 секунд), в соответствии с сигналом от датчика переключения трансмиссии 2В, и реле RL3 для подачи питания к генератору импульсов задержки 1Н, переключающееся согласно выходному сигналу третьего генератора импульсов времени 2С.
Блок торможения 6, как показано на фиг.15, содержит электромотор M1, который работает только в момент изменения полярности подаваемого напряжения, стальную проволоку 6В, прикрепленную к педали тормоза 6D, которая наматывается на вращающийся барабан 6А, приводимый в движение электродвигателем M1, для торможения транспортного средства, когда электродвигатель M1 вращается, и направляющий ролик 6С, закрепленный на полу кузова транспортного средства для правильной ориентации стальной проволоки 6В на вращающийся барабан 6А. В блоке торможения 6, малая шестерня 6-1, установленная на валу электродвигателя M1, введена в зацепление с большой шестерней 6-2, закрепленной на вращающемся барабане 6А так, что стальная проволока 6В может наматываться на вращающийся барабан 6А. В определенном положении барабана 6А, установлен стопор (фиксирующий штифт) 6-3, применяющийся для фиксации одного из концов стальной проволоки (троса) 6В. Кроме того, желательно, чтобы длина окружности барабана 6А равнялась 23 см.
Вернемся к фиг.14, в устройстве разблокировки тормоза 7 есть кнопочный выключатель. Обычно мотор подключен через нормально замкнутые контакты (левый контакт) кнопочного выключателя таким образом, чтобы электромотор M1 приводился в движение. При нажатии выключателя на 2-3 секунды, он соединяется с правым контактом с целью приведения во вращение электромотора для разблокировки блока торможения. Реле RL2 имеет две группы контактов для подачи (+) или (-) от батареи 12 к статорам m1, m2 электромотора М1.
Как было описано выше, во втором варианте конструкции представленного изобретения, второй генератор импульсов времени 1А генерирует импульсы времени, при котором сигнал "Высокая" соответствует длительности импульса 0,1 секунды. В это время период импульса времени равняется 0,2 секунды и может меняться. Согласно импульсу времени, логическая ячейка 1В (схема "И") выполняет операцию логического умножения сигнала частоты вращения и выходного сигнала второго генератора импульсов времени 1А, для определения частоты вращения, генерируемой, когда импульсы синхронизации от первого и второго счетчиков 1С, 1D - "Высокая".
Устройство сброса 1Е для обнуления первого и второго счетчиков 1C, 1D по каждому переднему фронту импульса времени от второго генератора импульсов времени 1А так, что эти счетчики 1C, 1D могут считывать число оборотов (производят расчет частоты вращения) двигателя, только когда импульсы времени "Высокая".
Теперь, причина генерации временного импульса "Высокая" при значении 0,1 секунды вторым генератором импульсов времени 1А описана.
Частота вращения 3000 об/мин значит, что двигатель вращается 3000 раз за 1 минуту, что соответствует 50 сигналам за 1 секунду и 5 за 0,1 секунды. Поэтому исходя из того, что данное изобретение распознает частоту вращения на основании импульса длительностью 0,1 секунды, при 600 об/мин генерируется опорный сигнал 1 за 0,1 секунды, а 7 сигналов генерируется при 4200 оборотах в минуту.
Первый и второй детекторы 1F, 1G распознают частоты вращения 600 об/мин и 4200 об/мин соответственно. Определение частоты вращения 600 об/мин - служит для распознания работы двигателя, в то время как частота вращения 4200 об/мин служит для распознания внезапного ускорения. Обычно в случае внезапного ускорения, частота вращения возрастает на 3600 об/мин (от 600 до 4200 об/мин), что невозможно при нажатии педали акселератора. Поэтому, так как сигнал 7 не соответствует нормальным условиям, данное изобретение распознает наличие внезапного ускорения, если в пределах заданного временного интервала достигается частота вращения 4200 об/мин. Такое задание внезапного ускорения можно изменять соответственно модели, марке, рабочему объему двигателя или характеристикам транспортного средства.
Помимо того, производится задержка выходного сигнала первого датчика 1F в генераторе импульса задержки 1Н приблизительно на 2,5 секунды, которая синхронизирует выходной сигнал первого датчика 1F, внося корректировку в соответствии с выходным сигналом второго детектора 1G. Выходные сигналы генератора импульса задержки и второго детектора 1Н, 1G перемножаются в логической ячейке II (схема "И"). Логическая ячейка II выдает сигнал "Высокая", когда первый и второй датчики фиксируют частоты вращения 600 об/мин и 4200 об/мин соответственно.
В этом случае при движении генератор импульса задержки 1Н получает питание от В + в соответствии с переключением реле RL3. Этот процесс подвода питания от В + к генератору импульса задержки 1Н следующий.
Сначала, датчик переключения трансмиссии 2В определяет изменение трансмиссии из положения Р или N в D или R. Если происходит переключение передачи, датчик переключения трансмиссии 2В фиксирует изменение трансмиссии из положения Р или N в D или R, третий генератор импульсов времени 2С генерирует импульсы для задания времени (например, около 5 секунд) согласно выходному сигналу датчика переключения трансмиссии 2В.
Затем, реле RL3 переключается из положения А в положение В, поэтому на генератор импульса задержки 1Н поступает питание В + через контакты реле RL3. В этом случае, третий генератор импульсов времени 2С генерирует импульсы для задания времени (например, около 5 секунд) для предотвращения внезапного ускорения, только при начале движения транспортного средства (при трогании транспортного средства) или повторном трогании после остановки. Это связано с тем, что внезапное ускорение не происходит во время движения транспортного средства.
Датчик положения трансмиссии 2А определяет соответствие положения трансмиссии D или R и затем выдает сигнал "Высокая", если трансмиссия находится в одном из этих положений. Согласно этому, логическая ячейка 3А выдает сигнал "Высокая", когда логическая ячейка II и датчик положения трансмиссии 2А выдают сигнал "Высокая" такой, что первый генератор импульсов времени 4 может генерировать импульсы для задания времени (например, около 3 секунд).
Если первый генератор импульсов времени 4 генерирует временные импульсы, в реле RL1 устройства блокировки питания двигателя 5, благодаря протеканию в катушке реле постоянного тока формируется магнитное поле, переключающее контакты реле из положения А в положение В. Тогда, реле RL1 блокирует подачу питания от батареи к мотору таким образом, что мотор останавливается.
В то же время, если первый генератор импульсов времени 4 генерирует временной импульс, две группы контактов реле RL2 переключаются из положения А в В вследствие образования магнитного поля из-за протекающего в катушке реле RL2 тока. В соответствии с этим, (-) батареи подается к нижнему статору m1, расположенному снизу ротора электромотора M1, через блок предотвращения внезапного ускорения 9 и блок разблокировки тормоза, в то время как (+) батареи подается на верхний статор m2, расположенный сверху ротора электродвигателя M1. Таким образом изменяется полярность напряжения питания, подаваемого к электродвигателю M1.
Следовательно, малая шестерня, смонтированная на валу электромотора M1, вращается, приводя в движение большую шестерню, введенную с ней в зацепление. Тогда, из-за вращения большой шестерни, стальная проволока 6В, соединенная с педалью тормоза 6D через ролик 6С, может плотно наматываться на барабан 6А, для торможения транспортного средства. В связи с тем, что длина окружности барабана 6а равняется 23 см, а педаль тормоза 6D максимально утапливается на 15 см, барабан 6А проворачивается не более, чем на один оборот.
Так как первый генератор импульсов времени 4 может генерировать импульсы около 3 секунд, разблокировка торможения по истечении 3 секунд происходит автоматически. В случае, если из-за ошибок в цепи разблокировка не происходит, нажатие кнопочного выключателя в течение 2-3 секунд приводит к переключению выключателя в правое положение. В связи с чем, мотор M1 приводится в движение для разблокировки тормоза. При отпускании кнопочного выключателя, он переключается в исходное положение или в левое положение.
Алгоритм, применяемый при повторном трогании после остановки транспортного средства, аналогичен предыдущему алгоритму старта.
С другой стороны, внезапное торможение, происходящее в процессе движения транспортного средства на высокой скорости, из-за неисправностей в работе устройства предотвращения внезапного ускорения, может послужить причиной аварийной ситуации. Поэтому, если нажатие на педаль акселератора водителем достаточно, устройство распознает, что разгон задается водителем (водитель требует высокого ускорения) и выключает кнопочный выключатель блока предотвращения внезапного ускорения 9 для отключения подачи питания торможения к электродвигателю M1 и, как следствие, предотвращения внезапного торможения.
Как описано выше, определенные цифры и временные интервалы, в представленном изобретении, могут изменяться согласно модели, марке, рабочему объему двигателя или характеристикам транспортного средства и т.д. таким образом, что будут возможны множество вариаций и их применений.
С другой точки зрения, возможен другой вариант конструкции, представленное изобретение может производить основные операции без контроллера 60, если все функции контроллера запрограммировать в главный процессор (CPU), который является контроллером в блоке управления двигателя (ECU) транспортного средства. В этом случае, все операции этого варианта конструкции аналогичны предыдущим вариантам конструкций за исключением того, что CPU в ECU выполняет все функции контроллера 60 и не будет описан.
Как было описано выше, представленное изобретение может тормозить транспортное средство, распознавая внезапное ускорение, на основании положении трансмиссии и частоты вращения двигателя, тем самым, предотвращая аварийные ситуации, вызванные внезапным ускорением для повышения безопасности езды, а также предотвращать внезапное торможение, вызванное сбоями устройства предотвращения внезапного ускорения, когда транспортное средство движется с высокими скоростями, которое может служить причиной ужасных аварий.

Изобретение предназначено для распознания внезапного ускорения на основании данных о частоте вращения и положении трансмиссии. Контроллер распознает внезапное ускорение, если происходит резкое увеличение частоты вращения в течение первого эталонного интервала времени при условиях, что трансмиссия находится в нейтральном положении N или парковочном Р, а датчиком ускорения АСС определяется падение выходного напряжения, заданного посредством акселератора, относительно опорного напряжения после включения замка зажигания. Кроме того, контроллер распознает внезапное ускорение, если трансмиссия переключается в положение движения и происходит резкое возрастание частоты вращения в течение второго эталонного интервала времени. Во время движения транспортного средства с высокой скоростью контроллер распознает внезапное ускорение только при переключении трансмиссии, повторно определяя частоту вращения. Также в качестве контроллера может использоваться центральный процессор СРU блока управления двигателем ECU транспортного средства. Технический результат заключается в том, что предложенные устройство и применяемый в нем способ могут обеспечить торможение транспортного средства при возникновении внезапного ускорения для предупреждения вызываемых им аварийных ситуаций. 5 с. и 29 з.п. ф-лы, 15 ил.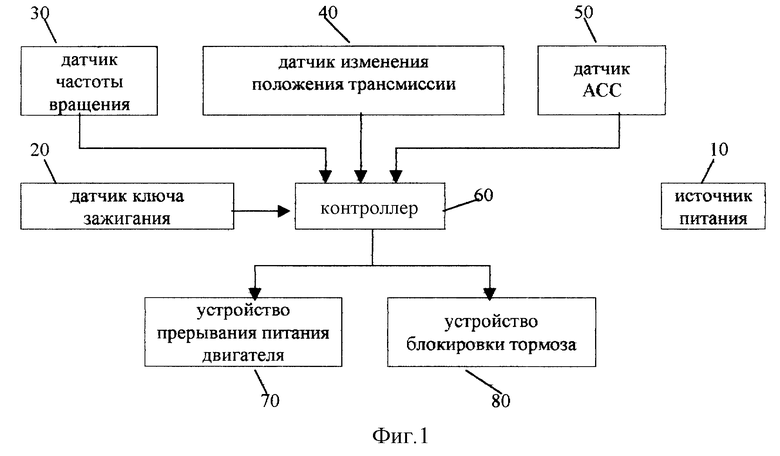
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ВОЗДЕЙСТВИЯ НА СКОРОСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2136513C1 |
| US 4942784 А, 24.07.1990 | |||
| DE 3834788 А, 26.04.1990. | |||
