Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к технологии для электронного стояночного тормоза (EPB) и, более конкретно, к устройству обнаружения и способу обнаружения для обнаружения числа оборотов бездатчикового EPB-электродвигателя, отличного от традиционного EPB-электродвигателя, оснащенного встроенным датчиком.
Уровень техники
[0002] В типичном применении EPB отдельный актуатор, оснащенный электродвигателем, используется, чтобы ограничивать перемещение колеса. EPB типа суппорта или типа ручной рычажной лебедки, главным образом, используется как средство для ограничения перемещения колеса. Например, для того, чтобы управлять положением суппорта и предоставлять надлежащее тормозное усилие колесу, магнит, как правило, располагается внутри актуатора, и линейный датчик Холла устанавливается для измерения изменения в магнитном поле от магнита. Натяжение стояночного тормоза, создаваемое в актуаторе посредством приведения в действие электродвигателя, может быть обнаружено посредством линейного датчика Холла.
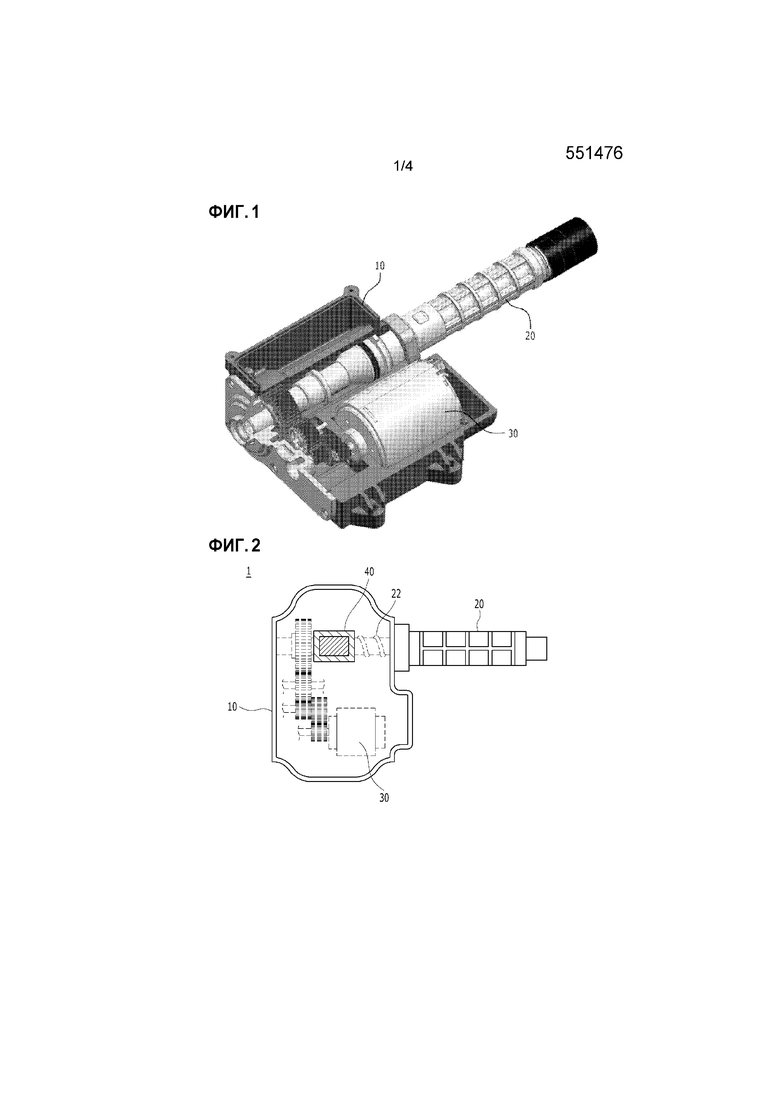
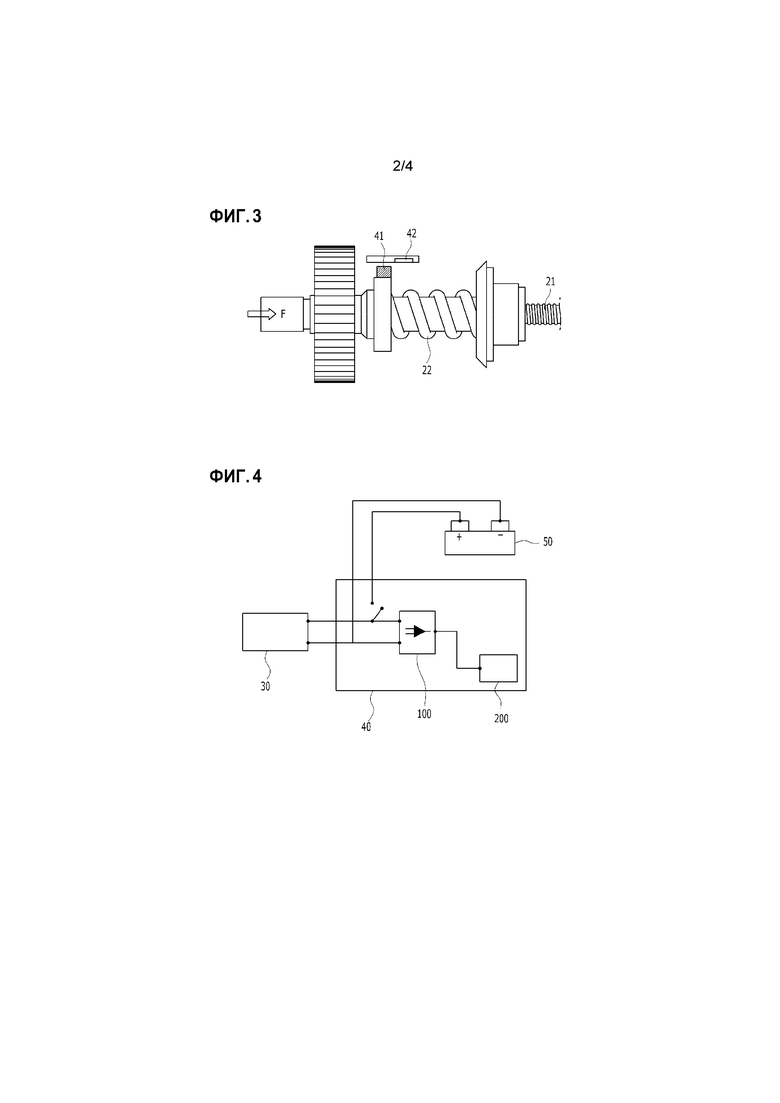
[0003] Фиг. 1 и фиг. 2 являются концептуальными схемами, показывающими пример EPB-узла. Фиг. 3 является видом, показывающим устройство для обнаружения числа оборотов электродвигателя согласно приводу актуатора EPB-узла согласно традиционному уровню техники.
[0004] Здесь, EPB-узел 1 может включать в себя, например, корпус 10, редуктор (не показан), актуатор 20, электродвигатель 30, электронный модуль 40 управления EPB и т.п. В частности, актуатор, показанный на фиг. 1-3, является актуатором типа ручной рычажной лебедки и имеет пружину 22 и резьбу 21, сформированную на зубчатом механизме, и вал вращения актуатора соответственно, в качестве одного варианта осуществления.
[0005] Система обнаружения натяжения стояночного тормоза традиционного уровня техники, показанная на фиг. 3, дополнительно включает в себя магнит 41 и узел 42 линейного датчика Холла для определения числа оборотов актуатора или электродвигателя. Материальные затраты увеличиваются вследствие добавления магнита 41 и узла 42 линейного датчика Холла, и магнитное тело магнита 41 должно иметь оптимальную структуру, чтобы чутко обнаруживать изменение в магнитном поле, которое приводит в результате к увеличению нагрузки на структуру.
[0006] Кроме того, если магнетизм теряется вследствие характеристик магнита, магнит не может играть роль самого датчика, что приводит в результате к явлению, называемому прихватыванием тормоза, в результате чего, существует проблема, что точное управление положением становится невозможным.
[0007] Кроме того, согласно традиционному устройству управления положением суппорта EPB, также существует риск того, что приведение в действие электродвигателя или актуатора не выполняется вследствие малозаметного позиционного колебания, вызванного непрерывным использованием EPB, перегревом электродвигателя, явления прилипания вследствие проникновения постороннего вещества в актуатор или явления износа, и т.п.
Описание
Техническая задача
[0008] Соответственно, настоящее изобретение было выполнено, принимая во внимание вышеуказанные проблемы, возникающие на традиционном уровне техники, и целью настоящего изобретения является предоставление устройства обнаружения и способа обнаружения для обнаружения числа оборотов электродвигателя, который управляет работой EPB-актуатора, без предоставления магнита и датчика Холла по отдельности.
[0009] Когда EPB-электродвигатель вращается, пульсирующий сигнал, формируемый вследствие электрической отталкивающей силы между ротором и статором в электродвигателе, используется, чтобы обнаруживать число оборотов электродвигателя.
[0010] И, наконец, предлагается способ управления точным положением EPB.
Техническое решение
[0011] Согласно варианту осуществления настоящего изобретения предоставляется устройство обнаружения для обнаружения числа оборотов бездатчикового электродвигателя для электронного стояночного тормоза (EPB), устройство включает в себя: электродвигатель для привода актуатора, используемый, чтобы приводить в действие и отпускать стояночный тормоз EPB-системы; электронный модуль управления для управления электродвигателем; аккумулятор транспортного средства для подачи электропитания электродвигателю и электронному модулю управления; и главный блок обработки для приема выходного сигнала электронного модуля управления и оценки числа оборотов электродвигателя, при этом электронный модуль управления дополнительно содержит блок измерения пульсации для приема выходного сигнала электродвигателя и измерения пульсации электродвигателя.
[0012] Согласно варианту осуществления выходной сигнал электродвигателя соответствует либо току, либо напряжению.
[0013] При этом выходной сигнал электродвигателя выводится как значение, отрегулированное с помощью усилителя сигнала или ослабителя сигнала.
[0014] Кроме того, блок измерения пульсации дополнительно включает в себя: селектор пульсирующего сигнала для выбора только пульсирующего сигнала из выходного сигнала электродвигателя; первый преобразователь уровня для приема пульсирующего сигнала, выбранного селектором пульсирующего сигнала, и сигнала постоянного тока аккумулятора и преобразования их электрического потенциала; и второй преобразователь уровня для приема сигнала постоянного тока аккумулятора и преобразования его электрического потенциала.
[0015] Согласно варианту осуществления блок измерения пульсации дополнительно включает в себя компаратор для сравнения выходного значения первого преобразователя уровня и выходного значения второго преобразователя уровня, чтобы выводить сигнал, полученный, когда пульсирующий сигнал изменяется.
[0016] Согласно варианту осуществления блок измерения пульсации дополнительно включает в себя контроллер смещения для управления рабочей чувствительностью к пульсирующему сигналу.
[0017] При этом контроллер смещения соединяется в обратном направлении с первым преобразователем уровня.
[0018] Согласно варианту осуществления блок измерения пульсации дополнительно включает в себя низкочастотный фильтр для устранения высокочастотного шума сигнала, выводимого из компаратора.
[0019] Кроме того, электронный модуль управления, который включает в себя блок измерения пульсации, выполнен в виде специализированной интегральной схемы (ASIC).
[0020] Согласно другому варианту осуществления настоящего изобретения предоставляется способ обнаружения числа оборотов бездатчикового электродвигателя для EPB, способ включает в себя: (a) выбор только пульсирующего сигнала из выходного сигнала электродвигателя; (b) объединение выбранного пульсирующего сигнала и сигнала постоянного тока аккумулятора транспортного средства; (c) сравнение сигнала, объединенного на этапе (b), и сигнала постоянного тока аккумулятора транспортного средства, чтобы выводить сигнал, полученный, когда пульсирующий сигнал изменяется; d) подача сигнала, выведенного на этапе (c), на главный блок обработки; и (e) оценка числа оборотов электродвигателя с помощью сигнала, поданного на главный блок обработки.
[0021] При этом, способ дополнительно включает в себя: управление смещением после этапа (b).
[0022] Кроме того, способ дополнительно включает в себя: этап фильтрации для устранения высокочастотного шума после этапа (c).
Полезные результаты
[0023] Согласно варианту осуществления настоящего изобретения представляется возможным определять число оборотов EPB-электродвигателя без предоставления магнита или линейного датчика Холла относительно использования EPB-электродвигателя.
[0024] Согласно настоящему изобретению, поскольку число оборотов EPB-электродвигателя может быть точно определено, существует преимущество в том, что предоставляется возможность точного управления положением EPB-системы.
[0025] Кроме того, поскольку магнит и линейный датчик Холла не предусматриваются, вес EPB-актуатора может быть уменьшен и его объем может быть уменьшен. Таким образом, актуатор может быть легко спроектирован, и стоимость изделия может быть снижена.
Краткое описание чертежей
[0026] Фиг. 1 и 2 являются видами, иллюстрирующими EPB-узел согласно одному варианту осуществления.
[0027] Фиг. 3 является видом, показывающим устройство для обнаружения числа оборотов электродвигателя согласно приводу актуатора EPB-узла согласно традиционному уровню техники.
[0028] Фиг. 4 является схематичным видом устройства для обнаружения числа оборотов электродвигателя для EPB согласно варианту осуществления настоящего изобретения.
[0029] Фиг. 5 является схемой, показывающей последовательность операций работы устройства для обнаружения числа оборотов бездатчикового электродвигателя для EPB настоящего изобретения.
[0030] Фиг. 6 является блок-схемой, показывающей способ обнаружения числа оборотов бездатчикового электродвигателя для EPB настоящего изобретения.
Оптимальный режим осуществления изобретения
[0031] Варианты осуществления, описанные ниже, предоставляются так, что специалисты в области техники могут легко понимать техническую идею настоящего изобретения, и, таким образом, настоящее изобретение не ограничивается ими. Кроме того, сущности, описанные на прилагаемых чертежах, могут отличаться от сущностей, фактически реализованных посредством схематичных чертежей, чтобы легко описывать варианты осуществления настоящего изобретения.
[0032] Следует понимать, что, когда элемент называется соединяемым или соединенным с другим элементом, он может быть непосредственно соединен или соединен с другим элементом, и другие элементы могут также присутствовать между ними.
[0033] Термин "соединение", когда используется в данном документе, означает непосредственно соединение или опосредованное соединение между элементом и другим элементом и может ссылаться на все физические соединения, такие как склеивание, скрепление, прикрепление, связывание и сцепление.
[0034] Также, выражения, такие как "первый", "второй" и т.д. используются, только чтобы различать между многочисленными конфигурациями, и не ограничивают порядок или другие спецификации между конфигурациями.
[0035] Сингулярные формы включают в себя множественные формы, пока контекст явно не диктует иное. Следует понимать, что слова "содержащий" или "имеющий" и т.д. означают, что отличительные признаки, числа, этапы, операции, элементы, части или их сочетания присутствуют, и один или более признаков или чисел, этапов, операций, элементов, частей или их сочетаний могут быть добавлены.
[0036] Прежде описания чертежей, те же составные элементы, что и на традиционном уровне техники, будут описаны с помощью тех же ссылочных позиций.
[0037] Устройство обнаружения для обнаружения числа оборотов бездатчикового электродвигателя для электронного стояночного тормоза (EPB) согласно варианту осуществления настоящего изобретения включает себя электродвигатель 30 для привода актуатора, используемый, чтобы приводить в действие и отпускать стояночный тормоз EPB-системы; электронный модуль 40 управления для управления электродвигателем 30; аккумулятор 50 транспортного средства для подачи электропитания электродвигателю 30 и электронному модулю 40 управления; и главный блок 200 обработки для приема выходного сигнала электронного модуля 40 управления и оценки числа оборотов электродвигателя 30.
[0038] При этом, настоящее изобретение характеризуется тем, что электронный модуль 40 управления дополнительно включает в себя блок 100 измерения пульсации для приема выходного сигнала электродвигателя 30 и измерения (или обнаружения) пульсации электродвигателя 30.
[0039] Электродвигатель 30 в настоящем изобретении является бездатчиковым электродвигателем, который не включает в себя магнит, датчик Холла и т.д.
[0040] Здесь, выходной сигнал электродвигателя 30 может соответствовать либо току, либо напряжению. Т.е., пульсация электродвигателя 30, измеряемая посредством блока 100 измерения пульсации настоящего изобретения, может быть пульсирующей составляющей тока возбуждения или пульсирующей составляющей напряжения возбуждения.
[0041] Фиг. 4 является схематичным видом устройства для обнаружения числа оборотов бездатчикового электродвигателя для EPB согласно настоящему изобретению. Обращаясь к фиг. 4, электродвигатель 30, электронный модуль 40 управления и аккумулятор 50 транспортного средства могут быть электрически соединены друг с другом. Электродвигатель 30 приводится в действие посредством получения электропитания от аккумулятора транспортного средства, чтобы обнаруживать пульсирующую составляющую выходного сигнала электродвигателя 30 и, таким образом, точно оценивать число оборотов электродвигателя 30. Дополнительно, когда число оборотов электродвигателя 30 оценивается, натяжение тормоза может быть оценено, и, таким образом, предоставляется возможность точной работы EPB-узла.
[0042] Между тем, выходной сигнал электродвигателя согласно примерному варианту осуществления настоящего изобретения может быть выведен как значение, отрегулированное с помощью усилителя сигнала и ослабителя сигнала.
[0043] Фиг. 5 является схемой, показывающей последовательность операций работы устройства обнаружения для обнаружения числа оборотов бездатчикового электродвигателя для EPB настоящего изобретения.
[0044] Блок 100 измерения пульсации настоящего изобретения может дополнительно включать в себя селектор 120 пульсирующего сигнала для выбора только пульсирующего сигнала из выходного сигнала электродвигателя; первый преобразователь 140 уровня для приема пульсирующего сигнала, выбранного посредством селектора 120 пульсирующего сигнала, и сигнала постоянного тока аккумулятора 50 транспортного средства и преобразования их электрического потенциала; и второй преобразователь 130 уровня для приема сигнала постоянного тока аккумулятора 50 транспортного средства и преобразования его электрического потенциала, как показано на фиг. 5. Здесь, первый преобразователь 140 уровня может быть соединен с линией L3 последовательности операций, чтобы принимать сигнал постоянного тока аккумулятора 50, и может быть соединен с линией L1 последовательности операций, чтобы принимать выбранный пульсирующий сигнал. Второй преобразователь 130 уровня может быть соединен с линией L2 последовательности операций, чтобы принимать сигнал постоянного тока аккумулятора 50.
[0045] Благодаря структурным характеристикам электродвигателя 30 особая пульсация присутствует в форме волны выходного сигнала электродвигателя 30, и только такой пульсирующий сигнал извлекается посредством селектора 120 пульсирующего сигнала, включенного в блок 100 измерения пульсации. При этом, структурные характеристики электродвигателя могут означать характеристики, вызванные вследствие электрической отталкивающей силы между ротором и статором, как описано выше.
[0046] Селектор 120 пульсирующего сигнала может быть, например, преобразователем истинного среднеквадратичного значения в значение постоянного тока. Преобразователь среднеквадратичного значения в значение постоянного тока является элементом схемы, имеющим трансформатор или датчик, встроенный в него, и может быть преобразователем для извлечения сигнала, который преобразует формы волн всех типов в эффективные значения безотносительно к постоянному току, переменному току, неустановившемуся переменному току и т.п. По меньшей мере, один OP-AMP предусматривается и соединяется с преобразователем истинного среднеквадратичного значения в значение постоянного тока, тем самым, делая возможным извлечение чистой формы волны пульсирующего напряжения.
[0047] Затем, первый преобразователь 140 уровня принимает сигнал постоянного тока аккумулятора 50 вместе с выбранным пульсирующим сигналом, чтобы преобразовывать их электрический потенциал. Т.е., чтобы обнаруживать число оборотов электродвигателя и, таким образом, устранять различные шумы или помехи, посредством объединения пульсирующего сигнала, который является неустойчивым, и сигнала постоянного тока, который имеет практически постоянный электрический потенциал.
[0048] Как показано на фиг. 5, второй преобразователь 130 уровня принимает только DC-сигнал аккумулятора 50. Второй преобразователь 130 уровня конфигурируется, чтобы предоставлять значение сравнения с электрическим потенциалом, преобразованным посредством первого преобразователя 140 уровня, через компаратор 110, описанный позже, и обнаруживать точное число оборотов электродвигателя. Сигнал постоянного тока во втором преобразователе 130 уровня и сигнал постоянного тока, который должен быть объединен в первом преобразователе 140 уровня, могут иметь практически одинаковый электрический потенциал, и в дополнение к DC-сигналу во втором преобразователе 130 уровня и DC-сигналу, который должен быть объединен в первом преобразователе 140 уровня, могут иметь практически одинаковую фазу.
[0049] Первый преобразователь 140 уровня и второй преобразователь 130 уровня могут быть сконфигурированы, например, посредством объединения цифрового импульсного преобразователя и других схемных элементов, и могут преобразовывать пульсирующую форму волны синусоидального напряжения или тока в прямоугольный выходной сигнал.
[0050] Блок 100 измерения пульсации в устройстве обнаружения для обнаружения числа оборотов бездатчикового электродвигателя для EPB согласно варианту осуществления настоящего изобретения может включать в себя компаратор 110, который сравнивает выходное значение первого преобразователя 140 уровня и выходное значение второго преобразователя 130 уровня и выводит сигнал, полученный, когда пульсация изменяется.
[0051] Первый преобразователь 140 уровня выводит электрический потенциал сигнала, полученного посредством инструктирования объединения и преобразования пульсирующего сигнала и сигнала постоянного тока, а выход второго преобразователя 130 уровня выводит только электрический потенциал сигнала постоянного тока. Соответственно, в отличие от выходного значения второго преобразователя 130 уровня, выходное значение первого преобразователя 140 уровня содержит уникальные характеристики, относящиеся к вращению электродвигателя. Компаратор 110 сравнивает электрический потенциал первого преобразователя 140 уровня и электрический потенциал второго преобразователя 130 уровня, чтобы обнаруживать изменение в пульсации, и, таким образом, оценивает число оборотов электродвигателя. При этом, выходной сигнал из компаратора 110 может быть преобразован в форму высокого/низкого прямоугольного сигнала или пульсовой волны.
[0052] Дополнительно, блок 100 измерения пульсации согласно варианту осуществления настоящего изобретения может дополнительно включать в себя низкочастотный фильтр 160 для устранения высокочастотного шума сигнала, выводимого из компаратора 110.
[0053] Между тем, блок 100 измерения пульсации согласно варианту осуществления настоящего изобретения может дополнительно включать в себя контроллер 150 смещения для управления рабочей чувствительностью к пульсирующему сигналу. Контроллер 150 смещения может быть соединен в обратном направлении с первым преобразователем 140 уровня.
[0054] Перед сравнением с электрическим потенциалом второго преобразователя 130 уровня в компараторе 110, когда сигнал пульсирующего напряжения или пульсирующего тока не подходит для ввода в компаратор 110, контроллер 150 смещения берет на себя роль создания более низкой или более высокой чувствительности для сигнала пульсирующего напряжения и пульсирующего тока заранее. Например, выходной сигнал компаратора 110 устраняется, когда не существует пульсации электродвигателя (т.е., когда электродвигатель не вращается), так что управление выполняется таким образом, что выходной сигнал компаратора 110 может быть сформирован, только когда всегда существует изменение в пульсирующем токе электродвигателя (т.е., когда электродвигатель вращается). Предпочтительно, сигнал пульсирующего напряжения или пульсирующего тока через контроллер 150 смещения использует сигнал, когда EPB-электродвигатель работает.
[0055] При этом, является или нет входной сигнал в компаратор 110 подходящим, может быть определено посредством сравнения с эталонным значением. Кроме того, контроллер 150 смещения может быть предусмотрен так, что эталонное значение может быть переменным образом установлено, чтобы соответствовать характеристикам, что пульсирующий ток и напряжение зависят от типа электродвигателя.
[0056] Между тем, электронный модуль 40 управления, включающий в себя блок 100 измерения пульсации, может быть выполнен в виде специализированной интегральной схемы (ASIC). Форма и размер электронного модуля 40 управления и размещение компонентов не ограничиваются показанными на чертежах и могут быть по-разному модифицированы.
[0057] Электронный модуль 40 управления настоящего изобретения функционирует как микроконтроллер в EPB и подсчитывает число импульсов пульсации, тем самым, предоставляя возможность точного измерения числа оборотов EPB-электродвигателя. В этом процессе пульсация типа напряжения или тока может быть преобразована в значение или параметр, который электронный модуль 40 управления может распознавать.
[0058] Электронный модуль 40 управления выдает команду возбуждения EPB-актуатора на основе измеренного числа оборотов EPB-электродвигателя, в результате чего, предоставляется возможность точного управления положением EPB.
[0059] Наконец, обращаясь к фиг. 6, будет описан способ обнаружения числа оборотов бездатчикового электродвигателя для EPB согласно варианту осуществления настоящего изобретения.
[0060] Фиг. 6 является блок-схемой, иллюстрирующей способ обнаружения числа оборотов бездатчикового электродвигателя для EPB настоящего изобретения.
[0061] Способ обнаружения числа оборотов электродвигателя согласно варианту осуществления настоящего изобретения включает в себя: (a) выбор только пульсирующего сигнала из выходного сигнала электродвигателя (S610); (b) объединение выбранного пульсирующего сигнала и сигнала постоянного тока аккумулятора транспортного средства (S620); (c) сравнение сигнала, объединенного на этапе (b), и сигнала постоянного тока аккумулятора транспортного средства с выходным сигналом, полученным, когда пульсирующий сигнал изменяется (S630); (d) подача сигнала, выведенного на этапе (c), на главный блок обработки (S640); и (e) оценка числа оборотов электродвигателя с помощью сигнала, поданного на главный блок обработки (S650).
[0062] Если множество пульсаций обнаруживается в пульсирующем сигнале, поданном главным блоком 200 обработки, обнаруженная пульсация является значением, отражающим информацию о структурах, уникальных для электродвигателя, таких как ротор, статор, фланец, воздушный зазор, корпус и т.п., и, таким образом, число оборотов электродвигателя может быть оценено с помощью пульсации.
[0063] В то время как блок-схемы последовательностей операций изображают операции на чертежах в конкретном порядке, они показаны ради получения наиболее желаемых результатов и не должны истолковываться как необходимое навязывание таких операций в конкретном порядке или показанном последовательном порядке. Т.е., этапы, описанные по ссылкам S610-S650, могут быть применены на практике таким образом, чтобы быть свободно заменяемыми специалистами в области техники без отступления от рамок изобретения.
[0064] Способ может дополнительно включать в себя этап управления смещением после этапа (b) и может дополнительно включать в себя этап фильтрации для удаления высокочастотного шума после этапа (c).
[0065] Поскольку способ обнаружения числа оборотов электродвигателя может быть выполнен с помощью устройства для обнаружения числа оборотов бездатчикового электродвигателя, описанного выше, так что оба являются практически одинаковыми, описание способа будет пропущено.
[0066] [0067] Спецификация не предназначается, чтобы ограничивать изобретение точной раскрытой формой. В то время как настоящее изобретение было описано в соединении с тем, что в настоящее время рассматривается как практические примерные варианты осуществления, следует понимать, что изобретение не ограничивается описанными вариантами осуществления, а, напротив, изменения и модификации могут быть выполнены.
[0068] Рамки настоящего изобретения определяются скорее прилагаемой формулой изобретения, чем подробным описанием, и все изменения или модификации, полученные из значения и диапазона формулы изобретения и ее эквивалентов, должны интерпретироваться как включенные в рамки настоящего изобретения.
Промышленная применимость
[0069] Согласно варианту осуществления настоящего изобретения, описанному выше, когда EPB-электродвигатель используется, число оборотов может быть точно обнаружено с помощью только пульсации EPB-электродвигателя, и точное управление положением EPB-системы представляется возможным на основе числа оборотов. Соответственно, магнит или линейный датчик Холла для измерения числа оборотов не являются необходимыми в отличие от традиционного EPB-электродвигателя, в результате чего, представляется возможным уменьшать объем всего EPB и уменьшать производственные затраты.
[0070]


Изобретение относится к технологии для электронного стояночного тормоза (EPB) и, более конкретно, к устройству обнаружения и способу обнаружения для обнаружения числа оборотов бездатчикового EPB-электродвигателя, отличного от традиционного EPB-электродвигателя, оснащенного встроенным датчиком. Технический результат изобретения заключается в обнаружении числа оборотов электродвигателя, который управляет работой EPB-актуатора, без предоставления магнита и датчика Холла по отдельности. Устройство обнаружения для обнаружения числа оборотов бездатчикового электродвигателя, включает в себя: электродвигатель для привода актуатора, используемый, чтобы приводить в действие и отпускать стояночный тормоз EPB-системы; электронный модуль управления для управления электродвигателем; аккумулятор транспортного средства для подачи электропитания электродвигателю и электронному модулю управления и главный блок обработки для приема выходного сигнала электронного модуля управления и оценки числа оборотов электродвигателя, при этом электронный модуль управления дополнительно содержит блок измерения пульсации для приема выходного сигнала электродвигателя и измерения пульсации электродвигателя. 2 н. и 8 з.п. ф-лы, 6 ил.
1. Устройство обнаружения для обнаружения числа оборотов бездатчикового электродвигателя для электронного стояночного тормоза (EPB), причем упомянутое устройство содержит:
электродвигатель для привода актуатора, используемый, чтобы приводить в действие и отпускать стояночный тормоз EPB-системы;
электронный модуль управления для управления электродвигателем;
аккумулятор транспортного средства для подачи электропитания электродвигателю и электронному модулю управления; и
главный блок обработки для приема выходного сигнала электронного модуля управления и оценки числа оборотов электродвигателя,
при этом электронный модуль управления дополнительно содержит блок измерения пульсации для приема выходного сигнала электродвигателя и измерения пульсации электродвигателя,
при этом выходной сигнал электродвигателя соответствует либо току, либо напряжению, и
при этом блок измерения пульсации дополнительно включает в себя:
селектор пульсирующего сигнала для выбора только пульсирующего сигнала из выходного сигнала электродвигателя;
первый преобразователь уровня для приема пульсирующего сигнала, выбранного посредством селектора пульсирующего сигнала, и сигнала постоянного тока аккумулятора и преобразования их электрического потенциала; и
второй преобразователь уровня для приема сигнала постоянного тока аккумулятора и преобразования его электрического потенциала.
2. Устройство по п. 1, в котором выходной сигнал электродвигателя выводится как значение, отрегулированное с помощью усилителя сигнала или ослабителя сигнала.
3. Устройство по п. 1, в котором блок измерения пульсации дополнительно включает в себя компаратор для сравнения выходного значения первого преобразователя уровня и выходного значения второго преобразователя уровня, чтобы выводить сигнал, полученный, когда пульсирующий сигнал изменяется.
4. Устройство по п. 1, в котором блок измерения пульсации дополнительно включает в себя контроллер смещения для управления рабочей чувствительностью к пульсирующему сигналу.
5. Устройство по п. 4, в котором контроллер смещения соединен в обратном направлении с первым преобразователем уровня.
6. Устройство по п. 1, в котором блок измерения пульсации дополнительно включает в себя низкочастотный фильтр для устранения высокочастотного шума сигнала, выводимого из компаратора.
7. Устройство по п. 1, в котором электронный модуль управления, который включает в себя блок измерения пульсации, выполнен в виде специализированной интегральной схемы (ASIC).
8. Способ обнаружения числа оборотов бездатчикового электродвигателя для EPB, причем упомянутый способ содержит этапы, на которых:
(a) выбирают только пульсирующий сигнал из выходного сигнала электродвигателя;
(b) объединяют выбранный пульсирующий сигнал и сигнал постоянного тока аккумулятора транспортного средства;
(c) сравнивают сигнал, объединенный на этапе (b), и сигнал постоянного тока аккумулятора транспортного средства, чтобы выводить сигнал, полученный, когда пульсирующий сигнал изменяется;
(d) подают сигнал, выводимый на этапе (c), на главный блок обработки; и
(e) оценивают число оборотов электродвигателя с помощью сигнала, поданного на главный блок обработки.
9. Способ по п. 8, дополнительно содержащий этап, на котором:
управляют смещением после этапа (b).
10. Способ по п. 8, дополнительно содержащий:
этап фильтрации, на котором устраняют высокочастотный шум, после этапа (c).
| KR 20100108013 A, 06.10.2010 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| US 2013261917 A1, 03.10.2013 | |||
| JP 2014064424 A, 10.04.2014. | |||

