Перекрестные отсылки к заявкам, имеющим отношение к данной заявке
Данная заявка является заявкой с частичным продолжением заявки на патент США Cep. N 08/376882 от 25 января 1995 г., которая является заявкой с частичным продолжением заявки на патент США Cep. N 08/105886 от 11 августа 1993 г. , которая является заявкой, поданной в продолжение заявки на патент США Cep. N 07/657155 от 15 февраля 1991 г., по которой выдан патент США N 5265079.
Предпосылки изобретения
1. Область изобретения
Настоящее изобретение относится к системам записи и хранения данных, содержащим корпус с отверстием для приема съемной кассеты диска, в которой для обеспечения ее защиты располагается носитель для записи информации. В частности, изобретение относится к системе для кодирования и записи с высоким быстродействием информации на оптические диски в формате высокой плотности, и для считывания и декодирования записанной на них информации.
2. Описание предшествующего уровня техники
Потребности в запоминающих устройствах большой емкости (массовых ЗУ) продолжают увеличиваться с расширением использования систем обработки данных и персональных компьютеров. Оптические системы хранения данных становятся все более популярным средством удовлетворения этих возрастающих потребностей. Такие оптические системы хранения данных обеспечивают большие объемы памяти одновременно при относительной их экономичности и быстродействии обеспечения доступа.
В оптических системах памяти на дисках кодированные видеосигналы, аудиосигналы и другие информационные сигналы записываются на диск в форме дорожек записи информации на одной или обеих плоских поверхностях диска. Оптическая система хранения данных в качестве основного своего элемента содержит по меньшей мере один лазер (или иной источник света). В первом рабочем режиме лазер генерирует лазерный луч высокой интенсивности, который сфокусирован на малом участке (пятне) на дорожке записи информации на вращающемся дисковом ЗУ. Этот лазерный луч высокой интенсивности повышает температуру материала поверхности записи выше точки Кюри, при которой материал теряет свою намагниченность и воспринимает намагниченность, обусловленную магнитным полем, в котором находится диск. Таким образом, путем управления или смещения этого окружающего диск магнитного поля и обеспечивая охлаждение диска ниже точки Кюри в контролируемой магнитной среде, можно осуществить запись информации на диске в форме магнитных областей, "питов" ("ямок"), на записывающей среде. Затем, если оператору необходимо воспроизвести или считать ранее записанную информацию, лазер устанавливают во второй рабочий режим. В этом режиме лазер генерирует лазерный луч низкой интенсивности, который вновь фокусируется на дорожках записи вращающегося диска. Этот лазерный луч низкой интенсивности не нагревает диск выше точки Кюри. Лазерный луч, однако, отражается от поверхности диска таким образом, что индицирует ранее записанную информацию, вследствие наличия ранее сформированных питов, и при этом может воспроизводиться ранее записанная информация. Поскольку лазер может быть сфокусирован с высокой точностью, система обработки информации данного типа позволяет обеспечить высокую плотность записи и точное воспроизведение записанной информации.
Компоненты типовой оптической системы включают корпус с портом ввода, посредством которого пользователь вводит носитель записи в дисковод. Этот корпус служит для размещения, в числе прочих элементов, механических и электрических подсистем для загрузки, считывания, записи и выгрузки оптического диска. Функционирование этих механических и электрических подсистем обеспечивается при управлении от системы обработки данных, с которой связан дисковод.
В корпусе традиционной системы, использующей дисковые кассеты, на плате основания системы обычно установлена поворотная платформа для вращения на ней диска. Поворотная платформа может содержать шпиндель, имеющий магнит, на котором установлена втулка диска. Магнит притягивает втулку диска, удерживая тем самым диск в требуемом для вращения положении.
В оптической системе с дисковым носителем, как описано выше, необходимо использовать магнитное смещение диска в процессе операции записи за счет приложения требуемого магнитного поля по меньшей мере к части диска, нагреваемого лазером в операциях записи информации (запись или считывание). Таким образом, необходимо установить устройство смещения магнитного поля в положение, при котором оно может удобно размещаться в непосредственной близости от поверхности диска, когда диск удерживается посредством магнита, связанного со шпинделем.
Различные типы носителей или дисков используются в оптических системах хранения данных в целях запоминания цифровой информации. Например, стандартные оптические системы с дисковыми носителями могут использовать диски размером 5 1/4 дюйма, такие оптические диски могут размещаться в защитном корпусе или кассете или использоваться без такой кассеты. Если оптический диск не стационарно закреплен в защитной кассете, оператор вручную извлекает диск из защитного корпуса. Оператор затем должен вручную загрузить диск в механизм загрузки, заботясь о том, чтобы не повредить поверхность записи.
Как вариант, для обеспечения удобства и в целях защиты, диск может быть установлен в корпусе или кассете, которая сама вводится в порт ввода дисковода и затем переносится в заранее определенное положение. Такие дисковые кассеты хорошо известны в компьютерной технике. Дисковая кассета содержит корпус кассеты, содержащей диск, на который могут записываться данные.
Загрузка кассеты
Для защиты диска, когда кассета находится вне дисковода, кассета диска обычно включает по меньшей мере одно окошко, которое нормально закрыто. Окошко кассеты может иметь один или более фиксирующих выступов, связанных с ней. Соответствующий дисковод включает механизм для открывания окошка на кассете, как только кассета вводится в систему. Такой механизм может содержать связь с окошком, которая осуществляет контакт с фиксирующим выступом, открывая при этом окошко. Когда кассета вводится в дисковод, окошко открывается, частично открывая носитель информации, содержащийся в кассете. Это обеспечивает загрузку втулки диска на шпиндель электромотора или иного приводного механизма и осуществляет ввод головки записи-считывания и магнитного смещения в защитную кассету. При вращении диска приводным механизмом головка записи-считывания получает доступ ко всем областям дискового носителя.
Для экономии пространства, занимаемого оптической системой, хранения данных, желательно минимизировать габариты устройства, осуществляющего загрузку диска на шпиндель и его выгрузку. Обычно устройства загрузки и выгрузки различаются по типу используемых дисков. Обычная система загрузки и выгрузки дисков, которая использует кассеты дисков, в типовом случае способна автоматически транспортировать кассету диска от приемного порта на шпиндель. Если диск больше не требуется, обычная система загрузки и выгрузки дисков автоматически выгружает диск со шпинделя. Устройство загрузки для выполнения такой загрузки и выгрузки диска обычно сконструировано так, что при загрузке диска (т.е. когда диск перемещается в позицию ввода в устройство воспроизведения и на шпиндель), диск перемещается горизонтально, параллельно плате основания и поворотной платформе, в направлении поворотной платформы. Когда диск помещен в положение над поворотной платформой, диск опускается по вертикали, перпендикулярно плоскости поворотной платформы, на шпиндель. После размещения диска на поворотной платформе магнит шпинделя притягивает втулку диска, закрепленную в центре носителя, при этом зажимая диск с возможностью вращения для осуществления операций считывания-записи.
Если оператор закончил использование диска, он переходит к операции вывода диска. Самым обычным решением при выводе кассеты и диска со шпинделя является способ, используемый в большинстве дисководов японского производства. В устройствах выгрузки дисков такого типа "коробка" кассеты имеет четыре штыря на ее сторонах, вводимых в дорожки на соседних направляющих в листовом металле. При извлечении диска коробка кассеты поднимает диск строго вверх со шпинделя. Затем устройство перемещает диск по горизонтали, параллельно плате основания и поворотной платформе, в направлении приемного порта диска впереди от воспроизводящего устройства. Когда диск таким образом поднят от шпинделя в процессе операции выгрузки, необходимо сформировать на кассете достаточное усилие, направленное вверх, чтобы преодолеть усилие магнитного зажима, удерживающее втулку диска у магнита шпинделя. Максимальное усилие в направлении вверх, требуемое для преодоления усилия магнитного зажима, может быть сформировано посредством механической операции рычага выталкивания или посредством задействования электрической системы выталкивания.
В обычных электрических системах выталкивания, когда устройство выгрузки дисковой кассеты осуществляет вертикальный подъем дисковой кассеты для преодоления магнитного усилия между магнитом шпинделя и дисковой втулкой, электромотор выталкивания должен генерировать большую нагрузку для обеспечения удаления дисковой кассеты. Следовательно, если оператор выбрал использование электрической системы выталкивания, то необходим большой электродвигатель, характеризуемый значительным крутящим моментом, для формирования достаточной вертикальной подъемной силы. Должно быть зарезервировано место в корпусе системы для размещения этого большого электропривода, что приводит к увеличению общих габаритов корпуса устройства загрузки кассет. Кроме того, большой электродвигатель потребляет значительную мощность.
Поэтому желательно уменьшить сложность устройства воспроизведения с диска, при сохранении общих габаритов устройства воспроизведения для повышения удобства использования дисководов в компьютерных системах. Для того чтобы обеспечить прием кассет 5 1/4-дюймовых дисков при сохранении габаритов достаточно малыми для обеспечения удобства использования в персональном компьютере, дисководы для оптических дисков должны использовать компактные и тщательно скомпонованные механические и электрические подсистемы. Имея это в виду, желательно уменьшить размеры требуемого электродвигателя выталкивания дисков. Для достижения этого результата можно уменьшить усилие, требуемое для прерывания магнитного усилия зажима, удерживающего втулку диска у магнита шпинделя. Благодаря уменьшению этого требуемого усилия, в устройстве воспроизведения можно использовать меньший по размерам электродвигатель выталкивания диска. Поэтому желательно спроектировать устройство загрузки диска, в котором диск не поднимается вертикально вверх от магнита шпинделя, а, напротив, снимается в сторону ("отслаивается") от магнита.
Обычный способ достижения такого "отслаивающего" действия использует поворот поворотной платформы и шпинделя вниз от диска. Этот способ описан в патенте США N 4791511 на имя Marvin Davis, переуступленном компании Laser Magnetic Storage International. Желательно, однако, создать дисковод, в котором диск "отслаивается" от магнита шпинделя.
Фокусировка и инициирование трекинга
Для обеспечения точного считывания информации, записанной на диске, необходимо иметь возможность перемещать линзу объектива как в процессе фокусировки (т.е. перпендикулярно плоскости диска) или в Z-направлении для фокусировки лазерного луча в маленькое световое пятно в точно определенном месте на диске при записи или поиске информации, так и в процессе трекинга (т.е. по радиусу от центра диска) или в Y-направлении для позиционирования луча точно над центром требуемой дорожки записи информации на диске. Коррекции фокусировки и трекинга могут осуществляться путем перемещения линзы объектива как в направлении оптической оси линзы для осуществления фокусировки, так и в направлении, перпендикулярном оптической оси, для осуществления трекинга.
В таких системах положения линзы объектива в направлениях фокусировки и трекинга обычно подстраиваются с помощью систем управления. Исполнительные механизмы подстраивают линзу объектива и преобразуют сигнал коррекции положения от систем управления с обратной связью в перемещение линзы объектива. Наиболее часто эти исполнительные механизмы содержат подвижные катушки, стационарные магниты и стационарное ярмо (станину), при этом магнитное поле формируется в воздушном зазоре между ярмом и магнитами. Патент США N 4568142 на имя Iguma на "Устройство привода линзы объектива" описывает исполнительный механизм такого типа, в котором исполнительный механизм включает прямоугольные магниты, размещенные в U-образных ярмах. Ярма магнитов разнесены друг от друга с противоположными северными полюсами, расположены достаточно близко друг к другу для формирования магнитной цепи. Фокусирующая катушка прямоугольной формы связана с внешними сторонами прямоугольной рамы линзы. Четыре следящие катушки скреплены с углами фокусирующей катушки. Концы фокусирующей катушки размещены в воздушных зазорах, образованных каждым U-образным ярмом, так что фокусирующая катушка накрывает ярма. Так как фокусирующая катушка должна выступать относительно этих пластин "центрального" или "внутреннего" ярма, катушка не может быть намотана с требуемой плотностью, и жесткость конструкции катушки определяется компромиссными требованиями. Кроме того, в этом типе конструкции замкнутой магнитной цепи основная часть катушки размещена вне воздушных зазоров, что значительно снижает эффективность исполнительного механизма.
В большинстве оптических систем жесткость катушки в воздушном зазоре должна быть очень высокой и резонансная частота развязки катушки должна быть выше 10 кГц, наиболее желательно - 25 кГц. Во многих типах известных конструкций исполнительных механизмов часто требовались большие количества проводников обмотки катушки в магнитном воздушном зазоре для достижения максимальной эффективности электропривода. Для размещения такого большого количества проводников катушки в воздушном зазоре и при обеспечении одновременного соответствия ограничениям по пространству конструкции исполнительных механизмов, катушка должна быть полностью или частично "свободностоящей" или должна быть намотана на максимально тонкую бобину. Эти типы конструкций катушек имеют низкую жесткость и в типовом случае развязаны на более низких частотах. Свойство динамического резонанса некоторых типов исполнительных механизмов может также обусловить размотку катушки в процессе работы.
Другие конструкции исполнительных механизмов используют один и тот же магнитный зазор при выработке усилий для приводов фокусировки и трекинга, поэтому катушка трекинга приклеена на катушку фокусировки или наоборот, для экономии конструктивных элементов, пространства и веса. В этих типах конструкций частота развязки катушки трекинга, приклеенной на свободностоящую катушку фокусировки, составляет в типовом случае около 15 кГц, существенно ниже предпочтительной частоты развязки.
Восприятие фокусировки
Системы оптической записи и воспроизведения, основанные на использовании ЗУ на оптических дисках, компакт-дисков или видеодисков, требуют точной фокусировки облучающего оптического пучка посредством линзы объектива на поверхности оптического диска. Падающий облучающий пучок обычно отражается назад через линзу объектива и затем используется для считывания информации, запомненной на диске. После прохождения через линзу объектива часть отраженного пучка в общем случае направляется к устройству, предназначенному для грубой настройки фокуса облучающего пучка на диске. Информация, выделенная из отраженного пучка посредством этого устройства, затем используется для регулировки фокуса облучающего пучка путем изменения положения подвижной линзы объектива относительно диска.
Известен ряд способов детектирования фокусировки облучающего оптического пучка. Например, в патенте США N 4423495, 4425636 и 4453239 описан способ определения фокуса пучка с использованием "призмы с критическим углом". В этом способе облучающий пучок, отраженный от дискового ЗУ, направляется на поверхность призмы для детектирования, которая установлена очень близко к критическому углу относительно отраженного облучающего пучка. Если фокусировка облучающего пучка на поверхности диска отклоняется от требуемого состояния, то изменение количества оптической энергии, отраженной от поверхности призмы для детектирования, может быть использовано для определения сигнала ошибки фокусировки, используемого для регулировки фокуса облучающего пучка.
Способ призмы с критическим углом обычно требует точной настройки ориентации поверхности призмы для детектирования относительно отраженного облучающего пучка. Это требование является результатом характеристики отражательной способности призмы для детектирования в области критического угла, что делает систему определения ошибок фокусировки, основанную на этом способе, чрезвычайно чувствительной. Однако способ критического угла имеет ряд недостатков. Во-первых, формируемый в результате сигнал ошибки фокусировки зависит от отражения света на поверхности раздела сред, образованных поверхностью призмы для детектирования и воздухом. Таким образом, изменения по высоте, которые изменяют показатель преломления воздуха, могут выдавать ложные отсчеты фокусировки (смешения). Кроме того, способ критического угла не пригоден по своей сути для использования в дифференциальных системах определения фокусировки. Дифференциальные системы становятся все более важными, так как они позволяют скомпенсировать некоторые типы шумов, которые могут иметь место в дисководах оптических дисков. Способ критического угла непригоден для дифференциального режима работы по двум причинам. Во-первых, переданный луч, сформированный измерительной призмой, сжат вдоль одной оси, что создает несимметричность в отраженном луче. Симметрия двух лучей предпочтительнее в дифференциальной системе с точки зрения оптимизации свойства компенсации шумов в различных условиях внешней среды. Во-вторых, в точке на кривой отражательной способности призмы критического угла, где интенсивности двух пучков уравновешены, крутизна слишком низка для формирования полезного сигнала ошибки дифференциальной фокусировки.
Устройство определения фокусировки, требующее несколько меньшей точности регулировки оптической поверхности, на которую попадает отраженный облучающий пучок, по сравнению со способом с критическим углом, описано в патенте США N 4862442. В частности, оптическая поверхность, описанная в нем, содержит многослойное покрытие с отражательной способностью, изменяющейся непрерывно по отношению к углу падения отраженного облучающего пучка. При этом несовершенство юстировки при вращении поверхности с многослойным покрытием в меньшей степени повлияет на сигнал ошибки фокусировки, однако, данный способ характеризуется пониженной угловой чувствительностью. Кроме того, неточности в определении ошибки сигнала фокусировки, сформированного системами с многослойным диэлектриком, могут возникать в ответ на относительно малые изменения длины волны отраженного облучающего пучка. Такая чувствительность к изменениям длины волны нежелательна, поскольку сигнал ошибки фокусировки должен относиться только к фокусировке облучающего пучка.
Кроме того, некоторые системы, использующие диэлектрическую многослойную отражающую поверхность, обеспечивают сигналы ошибок фокусировки с ограниченной степенью чувствительности. Например, на фиг.37 патента США N 4862442 представлена конкретная характеристика отражательной способности для слоистой диэлектрической отражающей поверхности, причем крутизна характеристики отражательной способности пропорциональна чувствительности сигнала ошибки фокусировки. Описанная в этом патенте интенсивность отражения находится в пределах от 0,75 до 0,05 для углов падения от 42 до 48o. Такое изменение отражательной способности, примерно 10% на градус, формирует сигнал ошибки фокусировки с относительно низкой чувствительностью.
Соответственно в технике существует необходимость в оптическом устройстве, характеризуемом профилем отражательной способности, который позволил бы сформировать высокочувствительный сигнал ошибки фокусировки, относительно стабильный по отношению к изменениям высоты и к хроматической аберрации, и который можно было бы использовать в дифференциальных системах.
Инициирование поиска
Системы хранения оптических данных, которые используют сфокусированный лазерный луч для записи и мгновенного воспроизведения информации, весьма привлекательны в ЗУ большой емкости для компьютерных систем. Такие системы запоминания оптических данных обеспечивают высокие скорости передачи данных при очень высокой плотности записи и высоком быстродействии доступа к данным, запомненным на носителе информации, обычно на оптическом диске. В таких системах памяти на оптических дисках считывание и запись данных часто выполняется с использованием одного лазерного источника, функционирующего с двумя соответствующими интенсивностями. При каждом режиме работы свет от лазерного источника проходит через линзу объектива, которая сводит световой пучок в конкретную точку фокуса на оптическом диске. При поиске данных лазерный луч фокусируется на носителе и изменяется за счет информации, содержащейся на носителе данных. Этот свет затем отражается от диска, проходит через линзу объектива на фотодетектор. Он представляет собой отраженный сигнал, который передает записанную информацию. Особенно важно, чтобы перед записью информации или ее считыванием из памяти линза объектива и возбуждающий сфокусированный луч были точно сфокусированы в центре необходимой дорожки записи, так чтобы информация могла быть точно записана или считана. Для достижения точного считывания информации, запомненной на диске, необходимо иметь возможность перемещать линзу объектива в направлении фокусировки (т. е. перпендикулярно плоскости диска) или в Z-направлении для того, чтобы сфокусировать лазерный луч в малое пятно света в точном местоположении на диске для записи или считывания информации, и в направлении трекинга (т.е. радиально) или в Y-направлении для позиционирования диска точно над центром требуемой дорожки записи на диске. Коррекции фокусировки и трекинга могут осуществляться перемещением линзы объектива как в направлении оптической оси линзы для фокусировки, так и в направлении, перпендикулярном оптической оси, для трекинга.
В этих системах положение линзы объектива в направлениях фокусировки и трекинга обычно подстраивается с помощью систем управления. Исполнительные механизмы поддерживают линзу объектива и преобразуют сигнал коррекции положения из систем управления с обратной связью в перемещение линзы объектива. Ясно, что при необеспечении фокусировки света на малом участке носителя, излишне большой участок диска будет использован для запоминания заданного количества информации или будет считываться слишком большая область диска. Аналогично, если не будет обеспечено точное управление трекингом лазерного луча, то это приведет к тому, что информация будет запомнена в неправильно определенном положении или информация будет считываться из неправильно определенного положения.
Помимо переноса вдоль оси Z для осуществления фокусировки и переноса вдоль оси Y для осуществления трекинга, имеются по меньшей мере четыре дополнительных режима перемещения для исполнительного механизма, каждый из которых снижает точность операции считывания и записи и, тем самым, нежелательны при нормальной работе системы. Эти нежелательные режимы перемещения включают поворот относительно оси Х (оси, ортогональной направлениям Х и Z) или тангаж; поворот относительно оси Z или рыскание, поворот относительно оси Y или крен; и линейное перемещение вдоль оси Х или тангенциальный перенос. Перемещения в этих направлениях часто вызываются электродвигателем и силами реакции, действующими на держатель и/или исполнительный механизм. Эти режимы обычно вызывают нежелательное перемещение в процессе операций трекинга или фокусирования, что, как следствие, влияет на юстировку линзы объектива относительно оптического диска.
Система анаморфической ахроматической призмы
Системы ЗУ на оптических дисках часто используют анаморфическую призму для регулировки эллиптичности лазерного пучка, для исключения астигматизма лазерного луча и/или для управления лучом. В патентах США N 4333173 на имя Yonezawa и др. , N 4542492 на имя Leterme и др., N 4607356 на имя Bricot и др. описано использование простых анаморфических призм для формирования луча в системах с оптическими дисками.
Часто системы анаморфических призм имеют нанесенную тонкую пленку для отражения части или всего обратного пучка (отраженного от оптического носителя) к системе детектирования. В патенте США N 4573149 на имя Deguchi и др. описано использование тонких пленок для отражения обратного пучка к системе детектирования. Кроме того, входная грань анаморфической призмы часто используется для отражения обратного луча в систему детектирования, как описано в патентах США N 4542492 и 4607356. Часто предпочтительнее иметь множество каналов детектирования. Например, в оптических дисках один детектор может обеспечивать сигналы данных, а другой детектор - управляющие сигналы, такие как сигналы следящего управления трекингом и/или фокусировкой.
Типовая проблема для обычных призм состоит в том, что анаморфической призме свойственна хроматическая дисперсия, которая может проявляться в поперечной хроматической аберрации. Иными словами, если длина волны источника света изменяется, то результирующие углы преломления при прохождении через анаморфическую призму также изменяются. Эти изменения приводят к поперечному сдвигу луча при фокусировке луча на оптическом носителе, таком, как оптический диск. В системах с оптическими дисками малый сдвиг луча может обусловить ошибочные сигналы данных. Например, если сдвиг возникает внезапно, причем в направлении данных, то пучок может пропустить данные, записанные на оптическом диске.
Если бы источник света (например, лазер) был истинно монохроматическим, хроматическая аберрация в призме не вызывала бы проблем. Однако, ряд факторов зачастую приводит к изменению спектра лазера. Например, большинство лазерных диодов реагируют изменением в длине волны при возрастании мощности. В магнитно-оптических системах с дисками возрастание мощности происходит при импульсном запуске лазера при переходе от низкой к высокой мощности для записи на оптический диск, как хорошо известно из уровня техники. Это возрастание лазерной мощности часто вызывает сдвиг длины волны порядка 1,5-3 нм в обычных системах. Большинство лазерных диодов также реагируют на изменение температуры изменением длины волны. Кроме того, случайный "перескок мод" может обусловить непрогнозируемые изменения длины волны, обычно в пределах от 1 до 2 нм. Радиочастотная модуляция часто используется в лазерных диодах, работающих при уровне мощности считывания, для минимизации влияния эффекта "перескока мод" на систему. Однако радиочастотная модуляция увеличивает спектральную ширину полосы и может привести к сдвигу центральной частоты. Более того, радиочастотная модуляция обычно не используется, когда лазер работает при уровне мощности записи. В неахроматической системе внезапное изменение длины волны падающего света обычно приводит к поперечному сдвигу пучка в сфокусированном пятне вплоть до нескольких сотен нм. Поперечный сдвиг пучка такой величины может вызвать значительные ошибки в сигнале данных.
В технике оптических систем известно использование систем многоэлементных призм для коррекции хроматической дисперсии. Эта идея обсуждена, например, в книге Warren J. Smith, Modern Optical Engineering. McGraw-Hill, 1966, pp. 75-77. Кроме того, некоторые системы с оптическими дисками используют системы с многоэлементными анаморфическими призмами, которые являются ахроматическими. Однако типовые системы многоэлементных призм требуют отдельной установки множества призменных элементов. Установка множества элементов увеличивает затраты и усложняет изготовление, так как каждый элемент должен тщательно юстироваться относительно других элементов системы. Малые отклонения в юстировке могут вызвать существенные отклонения в процессе функционирования. Это также усложняет контроль качества. Другие существующие элементы многоэлементных призм используют скрепленные элементы для формирования единой призмы, но эти призменные системы требуют, чтобы материал каждой призмы отличался, чтобы система была ахроматической. И, наконец, существующие системы, являющиеся ахроматическими, не обеспечивают формирования отражений обратного луча для систем с множеством детекторов.
Поиск данных - детектирование перехода
В течение ряда лет различные типы носителей для записи и стирания данных используются в целях записи и хранения данных. Такие носители включают, например, магнитные ленты или диски в системах различных конфигураций.
Существуют магнитооптические системы для записи данных на магнитных дисках и считывания с дисков. Процесс записи в магнитооптической системе в типовом случае связан с использованием магнитного поля для ориентации полярности обобщенной области на диске, в то время как лазерный импульс нагревает локализованную область, тем самым фиксируя полярность локализованной области. Локализованная область с фиксированной полярностью обычно называется "пит". Системы кодирования используют наличие или отсутствие пита на диске для определения регистрируемых данных как "1" или "0" соответственно.
При записи данных последовательность двоичных входных данных может быть преобразована посредством цифровой модуляции в другую двоичную последовательность с более подходящими свойствами. Модулятор может, например, преобразовывать m бит данных в кодовое слово с n битами кода модуляции ("binits"). В большинстве случае имеется больше кодовых битов, чем битов данных, т.е. m<n.
Коэффициент плотности данной системы записи часто выражается в соответствии с уравнением (m/n)x(d+l), где m и n соответствуют приведенным выше определениям, a d определяется как минимальное число нулей, появляющихся между единицами. Таким образом RLL 2/7/1/2 - код имеет, согласно вышеприведенному уравнению, коэффициент плотности, равный 1,5, в то время как GCR 0/3/8/9-код имеет коэффициент плотности, равный 0,89.
Для считывания данных в магнитооптической системе сфокусированный луч лазера или другого оптического устройства в типовом случае направляется на поверхность записи вращающегося оптического диска, так что лазерный луч может селективно получать доступ к одной из множества дорожек записи на поверхности записи. Поворот лазерного луча, отраженного от поверхности записи, может детектироваться с помощью магнитооптического эффекта Керра. Изменение первого типа, зафиксированное в магнитооптическом эффекте Керра, может представлять, например, первое двоичное значение, а соответствующее его изменение второго типа - второе двоичное значение. Выходной сигнал генерируется из первого и второго двоичных значений, возникающих с определенными тактовыми интервалами.
Хотя постоянно существует потребность в системах с дисковыми ЗУ, обеспечивающих запоминание данных с все более высокими плотностями, возможность достижения высоких плотностей запоминания данных удовлетворяется с определенными ограничениями. В общем случае, целесообразный верхний предел плотности данных определяется, в частности, требованиями надежности, оптической длиной волны лазерного диода, качеством оптического модуля, стоимостью аппаратных средств и быстродействием функционирования. На максимальные плотности данных также влияет возможность режектировать различные формы шумов, помех и искажений. Например, чем плотнее компоновка данных, тем в большей степени межсимвольная интерференция будет препятствовать точному восстановлению данных. Более того, поскольку технология для большинства оптических дисководов промежуточной и высокой эффективности ограничена условиями совместимости с более ранними моделями, методы обработки данных прогрессируют не столь быстро, как это могло бы иметь место.
При восстановлении записанных данных существующие каналы считывания магнитооптических и иных типов дисководов обычно испытывают трудности в связи с рядом проблем, обусловленных нарастанием постоянной составляющей в считываемом сигнале. Одной из причин нарастания постоянной составляющей является запись несимметричных комбинаций данных на протяжении некоторого числа байтов или сегментов данных. Симметричные комбинации данных могут рассматриваться как имеющие среднюю постоянную составляющую, равную нулю в области, представляющей интерес. Ввиду того, что последовательности записываемых бит могут быть по существу случайными во многих кодах модуляции, локализованные области записанных данных, имеющие различные комбинации единиц и нулей, могут сформировать несимметричный сигнал считывания, имеющий нежелательные постоянные составляющие. Так как комбинации символов в данных изменяются во времени, уровень нарастания постоянной составляющей будет также изменяться, обуславливая колебания опорного уровня постоянной составляющей, снижая допустимые границы по порогу детектирования и повышая восприимчивость к шумам и другим помехам.
Нежелательное нарастание постоянной составляющей также обусловлено разбросом в размерах пита вследствие тепловых влияний на лазер записи или на носитель. При разогреве записывающего лазера, например, размер пятна может увеличиваться, приводя к большей ширине питов. При считывании записанных питов вариации в их размерах обусловят формирование несимметричного входного сигнала, содержащего постоянные составляющие. Вариации в размерах питов не только вызывают нежелательное нарастание постоянной составляющей, но и обуславливают сдвиг во времени относительных местоположений данных, что приводит к уменьшению запаса во времени и приводит к возможным ошибкам считывания.
Предпринимались попытки преодолеть указанные проблемы. Например, различные системы накопителей на дисках используют код без постоянной составляющей, например такой, как 0/3/8/10-код, иначе называемый просто как 8/10-код. Поскольку 8/10-код требует 10 запомненных бит для получения 8 битов данных, то он имеет эффективность всего 80%, что представляет собой недостаток с точки зрения достижения высоких плотностей записи.
Другой способ решения проблемы нарастания постоянной составляющей связан с использованием двойного дифференцирования. Этот способ в типовом случае связан с детектированием пиков первой производной входного сигнала путем детектирования пересечений нуля второй производной входного сигнала. Таким образом, постоянная составляющая может быть эффективно отфильтрована. Недостатком этого способа является то, что дифференцирование или двойное дифференцирование может вызвать нежелательные шумовые эффекты. Второй недостаток состоит в том, что способ может снизить запас по времени до недопустимо низкого уровня (например, до 50%).
В другом способе, связанном с проблемой постоянной составляющей, данные, подлежащие запоминанию, рандомизируются до их записи, так что ни одна из комбинаций данных не повторяется в секторе данных. Этот способ, однако, может быть неприемлемым с точки зрения Международной организации по стандартизации и может оказаться несовместимым с предшествующими системами накопителей на магнитных дисках. Еще одним недостатком следует считать то, что операция, обратная рандомизации (т.е. дерандомизация), может оказаться излишне сложной.
Еще один способ контроля нарастания постоянной составляющей связан с использованием так называемых битов ресинхронизации (повторной синхронизации) между сегментами данных. Этот метод в общем случае связан с анализом и обработкой данных перед их записью для того, чтобы минимизировать нарастание постоянной составляющей при воспроизведении. Перед записью два последовательных сегмента данных анализируются, чтобы определить, обусловят ли комбинации единиц и нулей формирование положительной постоянной составляющей, отрицательной составляющей, или отсутствие постоянной составляющей при воспроизведении. Если, например, два последовательных сегмента данных имеют одну и ту же полярность, один из сегментов данных инвертируется перед записью на носитель. Для того чтобы остаться в пределах ограничений конкретной системы кодирования, однако, может потребоваться записать биты ресинхронизации между сегментами так, чтобы комбинация непрерывных битов и изменения знака потока были соответствующими. Недостаток такого способа состоит в том, что он не обеспечит необходимым образом снижение нарастания постоянной составляющей, и постоянные времени должны определяться так, чтобы прогнозируемое нарастание постоянной составляющей не повлияло на эффективность. Кроме того, этот способ требует дополнительных непроизводительных издержек, включая анализ сегментов данных для определения их относительной полярности.
Поэтому существует потребность в способе и устройстве для считывания запомненных данных с носителя, не имеющих нежелательных эффектов нарастания постоянной составляющей, не создающих неприемлемые уровни шумов или существенного снижения запаса по времени, не требующих больших непроизводительных издержек или использования алгоритмов дерандомизации и при этом обеспечивающих высокую эффективность хранения данных.
Хранение данных и другие аспекты поиска данных
Оптические диски для записи и стирания данных в настоящее время используются в качестве носителей для хранения данных. Магнитооптическая запись представляет собой метод, обычно используемый для записи данных на диск и/или для поиска данных на диске. При записи магнитное поле ориентирует полярность обобщенной области на диске, в то время как лазерный импульс нагревает локализованную область, фиксируя при этом полярность меньшей области. Локализованная область с фиксированной полярностью обычно называется "пит". Некоторые системы кодирования используют наличие или отсутствие пита на диске для определения записываемых данных как "1" или "0" соответственно. Наиболее широко используемая система кодирования для записи на основе питов использует код с ограниченной длиной последовательности - RLL 2,7-код, поскольку он обеспечивает максимальное отношение данных к питу. Данный тип записи, однако, не обеспечивает высокой плотности, поскольку амплитуда и запас по времени снижается очень быстро по мере возрастания частоты.
Настоящее изобретение предусматривает способ перемещения блока каретки из начального положения к конечному положению относительно носителя, вращающегося с определенной окружной скоростью. Способ, соответствующий изобретению, включает этапы определения первого радиального расстояния между исходным положением и центром носителя, определения второго радиального расстояния между конечным положением и центром носителя, определения расстояния по окружности между исходным положением и конечным положением, определения первоначальной окружной скорости носителя, вычисления траектории скорости относительно первого радиального расстояния, второго радиального расстояния, расстояния по окружности и исходной окружной скорости и перемещения блока каретки из начального положения в конечное положение по существу в соответствии с полученной траекторией скорости. Траекторию скорости вычисляют так, чтобы блок каретки приходил в конечное положение как по радиусу, так и по окружности существенно за одно и то же время. Кроме того, может быть определена конечная окружная скорость, вращение носителя может быть изменено от начальной окружной скорости до конечной окружной скорости, а траектория скорости кроме того увязывается с конечной окружной скоростью.
В соответствии с предпочтительным вариантом выполнения изобретения, способ перемещения блока каретки из начального положения в конечное положение относительно носителя, характеризуемого центром и длиной окружности и вращающегося относительно центра, включает этапы определения первого радиального расстояния между начальным положением блока каретки и центром носителя, определения второго радиального расстояния между конечным положением блока каретки и центром носителя, определения расстояния по окружности между начальным положением блока каретки и конечным положением блока каретки параллельно длине окружности носителя, определения начальной окружной скорости носителя относительно центра носителя, вычисления траектории скорости относительно первого радиального расстояния, второго радиального расстояния, расстояния по окружности и начальной окружной скорости так, чтобы при перемещении блока каретки из начального положения в конечное положение в соответствии с траекторией скорости блок каретки переместился как радиально, так и по окружности в конечное положение существенно за одно и то же время, и перемещения блока каретки из начального положения в конечное положение существенно в соответствии с траекторией скорости.
В соответствии с конкретным выполнением настоящего изобретения вышеописанный способ может кроме того включать дополнительные этапы определения окружной скорости носителя относительно центра носителя и приложения силы к носителю для изменения начальной окружной скорости до конечной окружной скорости, причем траектория скорости кроме того увязана с требуемой окружной скоростью, и при этом блок каретки будет перемещаться как радиально, так и по окружности в конечное положение за существенно одно и то же время, если будет перемещаться из начального положения в конечное положение по существу в соответствии с траекторией скорости и если начальная окружная скорость носителя изменяется до конечной окружной скорости.
Вышеуказанный способ, согласно изобретению, может быть, кроме того, определен тем, что носитель достигает конечной окружной скорости перед тем, как блок каретки переместится в конечное положение, или, как вариант, носитель может достичь конечной окружной скорости по существу в то же время, когда блок каретки переместится в конечное положение.
Еще один способ перемещения блока каретки из начального положения в конечное положение относительно носителя, характеризуемого центром и длиной окружности и вращающегося относительно блока каретки с окружной скоростью относительно центра, в соответствии с изобретением, включает этапы перемещения блока каретки из начального положения в конечное положение в соответствии с первой траекторией скорости, определения промежуточного положения блока каретки относительно носителя, определения первого радиального расстояния между промежуточным положением блока каретки и центром носителя, определения второго радиального расстояния между конечным положением блока каретки и центром носителя, определения расстояния по окружности между промежуточным положением блока каретки и конечным положением блока каретки параллельно длине окружности носителя, определения начальной окружной скорости носителя относительно центра носителя, вычисления траектории скорости относительно первого радиального расстояния, второго радиального расстояния, расстояния по окружности и начальной окружной скорости так, что когда блок каретки перемещается из промежуточного положения в конечное положение в соответствии с полученной траекторией скорости, блок каретки будет перемещаться как радиально, так и по окружности в конечное положение существенно за одно и то же время, и перемещения блока каретки из промежуточного положения в конечное положение по существу в соответствии с упомянутой траекторией скорости.
Этот другой способ может, кроме того, включать дополнительные этапы определения конечной окружной скорости носителя относительно центра носителя и приложения силы к носителю для изменения начальной окружной скорости до конечной окружной скорости, причем траектория скорости также увязана с желательной окружной скоростью, и при этом блок каретки будет перемещаться, как радиально, так и по окружности, в конечное положение по существу за одно и то же время, если перемещается из промежуточного положения в конечное положение по существу в соответствии с траекторией скорости и если начальная окружная скорость носителя изменяется до конечной окружной скорости.
Вышеуказанный другой способ, соответствующий изобретению, может быть осуществлен так, что носитель достигает конечной окружной скорости прежде, чем блок каретки переместится в конечное положение, или, альтернативно, так, что носитель достигает конечной окружной скорости по существу в то же самое время, когда блок каретки переместится в конечное положение.
Еще один альтернативный способ перемещения блока каретки из начального положения в конечное положение относительно носителя, характеризуемого центром и длиной окружности и вращающегося относительно блока каретки с окружной скоростью вокруг центра, соответственно изобретению, включает этапы определения радиального расстояния между начальным положением блока каретки и конечным положением блока каретки, определения расстояния по окружности между начальным положением блока каретки и конечным положением блока каретки параллельно окружности носителя, определения начальной окружной скорости носителя относительно центра носителя, вычисления траектории скорости относительно радиального расстояния, расстояния по окружности и начальной окружной скорости так, чтобы при перемещении блока каретки из начального положения в конечное положение в соответствии с траекторией скорости блок каретки переместился бы, как радиально, так и по окружности, в конечное положение по существу за одно и то же время, и перемещения блока каретки из начального положения в конечное положение по существу в соответствии с полученной траекторией скорости. Данный другой альтернативный способ может, кроме того, включать дополнительные этапы определения конечной окружной скорости носителя относительно центра носителя и приложения силы к носителю для изменения от начальной окружной скорости до конечной окружной скорости, причем траектория скорости также увязана с желательной окружной скоростью, и при этом блок каретки будет перемещаться, как радиально, так и по окружности, в конечное положение по существу за одно и то же время при перемещении из начального положения в конечное положение по существу в соответствии с полученной траекторией скорости и при изменении начальной окружной скорости носителя до конечной окружной скорости.
Этот другой альтернативный способ, согласно изобретению, может быть осуществлен так, что носитель достигает конечной окружной скорости прежде, чем блок каретки переместится в конечное положение, или, альтернативно, так, что носитель достигнет конечной окружной скорости по существу в то же самое время, когда блок носителя переместится в конечное положение.
Еще один третий способ перемещения блока каретки из начального положения в конечное положение относительно носителя, характеризуемого центром и длиной окружности и вращающегося относительно блока каретки с окружной скоростью вокруг центра, при выполнении в соответствии с изобретением, включает этапы перемещения блока каретки из начального положения радиально в конечное положение в соответствии с первой траекторией скорости, определения промежуточного положения блока каретки относительно носителя, определения радиального расстояния между промежуточным положением блока каретки и конечным положением блока каретки, определения расстояния по окружности между промежуточным положением блока каретки и конечным положением блока каретки параллельно окружности носителя, определения начальной окружной скорости носителя относительно центра носителя, вычисления траектории скорости относительно радиального расстояния, расстояния по окружности и начальной окружной скорости так, чтобы при перемещении блока каретки из промежуточного положения в конечное положение в соответствии с траекторией скорости блок каретки перемещался, как радиально, так и по окружности, в конечное положение по существу за одно и то же время, и перемещения блока каретки из промежуточного положения в конечное положение по существу в соответствии с траекторией скорости.
Данный третий способ может, кроме того, включать дополнительные этапы определения конечной окружной скорости носителя относительно центра носителя и приложения силы к носителю для изменения от начальной окружной скорости до конечной окружной скорости, причем траектория скорости, кроме того, увязана с желательной окружной скоростью, и при этом блок каретки будет перемещаться, как радиально, так и по окружности, в конечное положение по существу за одно и то же время, при перемещении из промежуточного положения в конечное положение по существу в соответствии с траекторией скорости и при изменении начальной окружной скорости носителя до конечной окружной скорости.
Данный третий способ, согласно изобретению, может аналогичным образом быть осуществлен так, чтобы носитель достигал конечной окружной скорости прежде, чем блок каретки переместится в конечное положение, или, альтернативно, так, чтобы носитель достигал конечной окружной скорости по существу в то же самое время, когда блок каретки переместится в конечное положение. Другие цели настоящего изобретения, дополнительные его особенности и преимущества станут очевидны для специалистов в данной области техники из нижеследующего описания со ссылками на иллюстрирующие чертежи.
Краткое описание чертежей:
фиг. 1 - вид в изометрии накопителя на оптических дисках, выполненного согласно изобретению;
фиг.2 - вид сверху дисковода по фиг.1 с удаленным корпусом;
фиг. 3 - поперечное сечение дисковода по фиг.1 в направлении по стрелкам 3-3 по фиг.1;
фиг.4А - вид сверху оптического модуля дисковода по фиг.1;
фиг.4В - схема оптического канала дисковода по фиг.1;
фиг.5 - блок-схема электронной системы дисковода по фиг.1;
фиг. 6 - другой вид в изометрии дисковода с кассетой диска, вводимой в него;
фиг. 7 - вид в изометрии с пространственным разнесением элементов дисковода по фиг.6, иллюстрирующий его основные субблоки;
фиг.8А и 8В - виды в изометрии платы основания, показанной на фиг.7;
фиг. 9 - вид сверху сбоку дисковода по фиг.6 с некоторыми снятыми деталями для лучшего показа рычага, зубчатой передачи привода рычага, электропривода этой передачи и функциональной взаимосвязи между этими элементами;
фиг.10А-10F - виды сбоку и в изометрии рычага;
фиг.11А-11С - виды сбоку и в изометрии левого башмака-ползуна;
фиг.12А-12Е - виды сбоку и в изометрии правого башмака-ползуна;
фиг. 13 - вид сверху установочного рычага в двух положениях, одно из которых показано пунктиром, иллюстрирующий установку каретки в задней части дисковода, находящегося в исходном положении;
фиг.13А - вид в перспективе дисковода по фиг.1, иллюстрирующий, в частности, каретку блока точного исполнительного механизма, которая поддерживает оптические элементы, используемые для фокусировки лазернего луча на дорожке записи данных оптического диска;
фиг.14А-14С - виды сбоку и в изометрии установочного рычага;
фиг.15А и 15В - виды в изометрии приемника кассеты;
фиг. 16А и 16В - виды сбоку, при введении кассеты диска, дисковода по фиг. 6 с некоторыми удаленными деталями для лучшего показа расцепляющего выступа на правой тяге заслонки, защелки и функциональной взаимосвязи между этими элементами;
фиг. 17А и 17В - виды в изометрии защелки, удерживающей приемник кассеты в верхнем положении;
фиг.18 - вид в изометрии зажима блока катушки смещения;
фиг.19 - вид в изометрии блока катушки смещения;
фиг.20 - вид в изометрии с пространственным разнесением деталей основных компонентов, образующих блок катушки смещения;
фиг. 21 - вид в изометрии поворотной штанги или направляющей, которая поддерживает с возможностью поворота блок катушки смещения;
фиг. 22 - вид в изометрии изгибного элемента блока катушки смещения, на котором установлен блок катушки смещения и который, в свою очередь, установлен на поворотной штанге, показанной на фиг.21;
фиг. 23 - вид сбоку правой стороны приемника кассеты и кассеты непосредственно перед началом цикла выталкивания кассеты, изображающий диск, установленный в рабочем положении на шпинделе;
фиг.24 - вид сбоку правой стороны приемника кассеты и кассеты в процессе цикла выталкивания, изображающий поворачиваемую кассету и диск, снимаемый со шпинделя;
фиг.25 - вид сбоку правой стороны приемника кассеты и кассеты в процессе цикла выталкивания, изображающий систему загрузки кассеты в верхнем положении и диск в начале его выталкивания из дисковода;
фиг. 26 - схематичное представление в перспективе исполнительного механизма, согласно настоящему изобретению;
фиг.27 - вид в перспективе держателя линзы для исполнительного механизма по фиг.26;
фиг.28 - вид в перспективе исполнительного механизма по фиг.26 в корпусе средств создания магнитного поля во взаимосвязи системы записи;
фиг.29 - вид сверху системы записи по фиг.28;
фиг.30 - вид сбоку с правой стороны системы записи по фиг.28;
фиг.31 - вид спереди сбоку системы записи по фиг.28;
фиг.32 - схематичное представление в перспективе магнитных полей, формируемых парами магнитов исполнительного механизма по фиг.26;
фиг. 33 - вид в перспективе фокусирующих катушек и постоянных магнитов исполнительного механизма по фиг.26;
фиг. 34 - схематичный вид в сечении фокусирующих катушек и постоянных магнитов исполнительного механизма по фиг.26 по линиям 34-34 по фиг.33, иллюстрирующий силы фокусировки, действующие на исполнительный механизм;
фиг. 35 - схематичный вид в сечении катушки трекинга и постоянных магнитов исполнительного механизма по фиг.26, иллюстрирующий силы трекинга, действующие на исполнительный механизм;
фиг.36 - схематичное представление предпочтительного варианта выполнения устройства восприятия фокусировки пучка, соответствующего изобретению;
фиг. 37 - увеличенный вид сверху в сечении дифференциального варианта модуля разделения пучка, соответствующего изобретению (FTR-призма);
фиг. 38 - вид спереди первого и второго квадратурных детекторов, содержащихся в устройстве восприятия фокусировки, соответствующем изобретению;
фиг. 39 - график, иллюстрирующий отражательную способность FTR-призмы в функции угла падения следящего пучка;
фиг. 40 - график значения дифференциального сигнала ошибки фокусировки, генерируемого в предпочтительном варианте выполнения изобретения, в функции положения линзы объектива относительно оптического диска;
фиг.41 - схематичное представление примера выполнения оптической системы записи/считывания, в которой может быть использован блок каретки и исполнительного механизма, соответствующий изобретению;
фиг.42 - вид в перспективе блока каретки и исполнительного механизма;
фиг.43 - вид с разнесением элементов блока каретки и исполнительного механизма;
фиг.44 - вид с разнесением элементов исполнительного механизма;
фиг. 45 - схематичный вид сверху, иллюстрирующий силы грубого фокусирования, действующие на блок;
фиг. 46 - схематичный вид сбоку, дополнительно иллюстрирующий силы грубого трекинга;
фиг. 47 - вид с разнесением элементов, иллюстрирующий силы фокусировки, действующие на исполнительный механизм;
фиг. 48 - вид с разнесением элементов, иллюстрирующий силы точной фокусировки, действующие на исполнительный механизм;
фиг. 49а - схематичный вид сверху, иллюстрирующий симметрию сил грубой фокусировки в горизонтальной плоскости;
фиг. 49В - схематичный вид сбоку, иллюстрирующий симметрию сил грубого трекинга в вертикальной плоскости;
фиг. 50А - схематичный вид сверху, иллюстрирующий симметрию сил точного трекинга в горизонтальной плоскости;
фиг. 50В - схематичный вид с торца, иллюстрирующий совмещение равнодействующей силы точного трекинга с центром масс привода точного трекинга;
фиг. 51А - схематичный вид сверху, иллюстрирующий симметрию сил реакции точного трекинга в горизонтальной плоскости;
фиг. 51В - схематичный вид с торца, иллюстрирующий совмещение равнодействующей силы точного трекинга с центром масс привода точного трекинга;
фиг. 52А - схематичный вид сбоку, иллюстрирующий симметрию сил фокусировки в горизонтальной плоскости;
фиг. 52В - схематичный вид с торца, иллюстрирующий совмещение равнодействующей силы фокусировки с оптической осью линзы объектива;
фиг. 53А - схематичный вид сбоку, иллюстрирующий симметрию сил реакции фокусировки в горизонтальной плоскости;
фиг. 53В - схематичный вид с торца, иллюстрирующий совмещение равнодействующей силы реакции фокусировки с оптической осью линзы объектива;
фиг. 54 - схематичный вид сверху, иллюстрирующий силы изгиба и силы реакции точного привода, генерируемые в ответ на силы изгиба;
фиг. 55А - схематичный вид сбоку, иллюстрирующий симметрию сил подвески каретки в горизонтальной плоскости;
фиг. 55В - схематичный вид с торца, иллюстрирующий совмещение равнодействующей силы подвески каретки с оптической осью линзы объектива;
фиг. 56А - схематичный вид сверху, иллюстрирующий симметрию сил трения в горизонтальной плоскости;
фиг. 56В - схематичный вид сбоку, иллюстрирующий совмещение сил трения с центром масс каретки;
фиг. 57 - схематичный вид с торца, иллюстрирующий равнодействующие силы инерции, действующие на центр масс точного привода и центр масс каретки в ответ на вертикальное ускорение;
фиг. 58А - схематичный вид сбоку, иллюстрирующий совмещение равнодействующей силы инерции точного привода с оптической осью линзы объектива;
фиг. 58В - схематичный вид сбоку, иллюстрирующий совмещение равнодействующей силы инерции каретки с оптической осью линзы объектива;
фиг. 59А - схематичный вид сверху, иллюстрирующий силы инерции, действующие на компоненты блока каретки и исполнительного механизма при горизонтальных ускорениях;
фиг. 59В - схематичный вид сверху равнодействующих сил инерции для горизонтальных ускорений;
фиг. 60А - схематичный вид с торца, иллюстрирующий точный привод и силы инерции каретки для ускорений выше резонансной частоты рычага изгиба;
фиг.60В - схематичный вид с торца, иллюстрирующий точный привод и
силы инерции каретки для ускорений ниже резонансной частоты рычага изгиба;
фиг.61А-61В - диаграммы, иллюстрирующие соотношение между положением точного трекинга и током точного привода;
фиг.62А-62С - иллюстрация влияния асимметричных сил фокусировки на блок;
фиг. 63 - иллюстрация альтернативного варианта блока каретки и исполнительного механизма;
фиг. 64 - иллюстрация работы исполнительного механизма при перемещении держателя линзы в направлении фокусировки;
фиг. 65 - иллюстрация работы исполнительного механизма при перемещении держателя линзы в направлении трекинга;
фиг. 66 - представление простой анаморфической призмы и иллюстрация влияния хроматической аберрации в призме;
фиг.67 - изображение существующей системы анаморфической призмы;
фиг. 68 - представление примера выполнения системы призмы с воздушным промежутком, соответствующего настоящему изобретению;
фиг.69 и 69А - представление варианта выполнения системы многоэлементной призмы с воздушным промежутком, соответствующего изобретению;
фиг. 70, 70А, 70В - виды сбоку, снизу и сверху соответственно пластинчатой призмы варианта системы призм, показанного на фиг.69;
фиг. 71А и 71В - виды сбоку, сверху и снизу соответственно трапецеидальной призмы варианта системы призм по фиг.69;
фиг. 72 и 72А - вид сбоку и вид сверху оптической поверхности соответственно варианта хроматической корректирующей призмы системы призм по фиг.69;
фиг. 73 - другой вариант выполнения системы многоэлементной призмы с воздушным промежутком, соответствующей изобретению;
фиг. 74, 74А и 74В - виды сбоку, сверху и снизу соответственно четырехугольной призмы варианта по фиг.73;
фиг.75 - блок-схема, иллюстрирующая оптическую систему запоминания и поиска данных;
фиг.76 - последовательность форм сигналов;
фиг.77А и 77В - схемы сигналов для симметричного и несимметричного входного сигналов соответственно;
фиг.78 - блок-схема канала считывания;
фиг.79А - более детальная схема каскадов каналов считывания;
фиг.79В - детальная схема отдельного каскада интегратора;
фиг.80А-80Е - частотные отклики различных каскадов каналов считывания;
фиг. 80F - график групповой задержки для комбинации каскадов в канале считывания;
фиг.80G(1)-80G(4) - формы сигналов в различных каскадах каналов считывания;
фиг.81 - блок-схема схемы пикового детектирования и трекинга;
фиг.82 - схема пикового детектирования и трекинга по фиг.81;
фиг. 83 - формы сигналов, иллюстрирующие трекинг с использованием порогового сигнала огибающей постоянного тока входного сигнала;
фиг.84А-84D - формы сигналов в различных точках канала считывания;
фиг.85 - блок-схема оптической системы записи поиска данных;
фиг.86 - формы сигналов, иллюстрирующие регулярный импульсный запуск лазера с использованием импульсного GCR-формата и нерегулярный импульсный запуск лазера с использованием RLL 2,7-формата;
фиг.87 - последовательность форм сигналов, иллюстрирующая импульсный запуск лазера для различных комбинаций данных, регулируемых схемой компенсации записи;
фиг.88 - блок-схема схемы компенсации записи;
фиг.89 - последовательность форм сигналов, иллюстрирующая импульсный запуск лазера для коррекции амплитудной асимметрии;
фиг.90 - блок-схема схемы коррекции амплитудной асимметрии;
фиг.91 - блок-схема, иллюстрирующая взаимосвязь элементов средства преобразования импульсов;
фиг. 92 - последовательность форм сигналов, иллюстрирующая регулировку порога с помощью динамической пороговой схемы;
фиг.93 - блок-схема динамической пороговой схемы;
фиг. 94 - блок-схема оптической системы записи и поиска данных, характеризуемая совместимостью с предшествующими системами;
фиг.95 - схема дорожки оптических дисков с высокой плотностью записи данных;
фиг.96 - диаграмма секторного формата оптических дисков с высокой плотностью записи данных;
фиг.97 - более детальная блок-схема схемы записи/считывания по фиг.94;
фиг. 98 - таблица, изображающая, для каждой из 21 зоны предпочтительного формата оптического диска с высокой плотностью записи данных, дорожки записи в пределах зоны, число секторов на дорожку в пределах зоны, полное число секторов в зоне и частоту записи данных, записанных в зоне;
фиг. 99 - таблица уравнений, используемых для вычисления битов контроля циклическим избыточным кодом поля идентификатора (ID);
фиг. 100А - первая половина таблицы (от поз. Hex до F), иллюстрирующая то, как 8-битные байты в трех адресных полях и в поле данных, за исключением байтов ресинхронизации, преобразуются в биты каналов на диске;
фиг.100В - вторая половина таблицы (от поз.80 до FF), иллюстрирующая то, как 8-битные байты в трех адресных полях и в поле данных, за исключением байтов ресинхронизации, преобразуются в биты каналов на диске;
фиг. 101А-119 - блок-схемы электронных схем для предпочтительного варианта осуществления изобретения;
фиг.120 - вид в изометрии механического блока развязки и полюсного наконечника в соответствии с предпочтительным вариантом выполнения;
фиг.121 - вид в изометрии механического блока развязки, согласно второму предпочтительному варианту выполнения;
фиг. 122 - диаграмма состояний модуля микропрограмм режима считывания, используемого в связи с настоящим изобретением;
фиг. 123 - диаграмма состояний модуля микропрограмм режима записи, используемого в связи с настоящим изобретением;
фиг. 124 - диаграмма Найквиста передаточной функции цепи фокусировки для выбранной величины коррекции замкнутой цепи;
фиг. 125 - графическое представление амплитудных откликов передаточной функции цепи фокусировки для разомкнутого и замкнутого состояний;
фиг. 126 - графическое представление фазовых откликов передаточной функции цепи фокусировки для разомкнутого и замкнутого состояний;
фиг. 127 - кривые амплитудного отклика для передаточных функций компенсации фокусировки;
фиг. 128 - кривые фазового отклика для передаточных функций компенсации фокусировки.
Описание предпочтительных вариантов осуществления изобретения
Построение системы: основные оптические, электрические и механические компоненты
На фиг.1 представлен накопитель на оптических дисках (дисковод) 10, имеющий корпус 14. Дисковод 10 обеспечивает воспроизведение и/или запись на диск (не показан), находящийся в съемной кассете 12 для диска. Как вариант, диск может быть размещен в корпусе 14 дисковода 10.
На фиг. 2 представлен вид сверху дисковода 10 со снятым корпусом 14 для наглядности представления некоторых важных механических, электрических и оптических компонентов дисковода 10. На фиг.3 представлено поперечное сечение дисковода 10 в направлении по линиям 3-3 на фиг.1. На фиг.2 представлены плата основания 16, шпиндель 17, блок линейных исполнительных механизмов 20, блок каретки линзы объектива 22, оптический модуль 24, плата схемы дисковода 26 и гибкий схемный соединитель 28. На фиг.3 показаны главная схемная плата 30, электродвигатель 18 шпинделя, схемная плата 27 оптического модуля 27 и схемная плата 26 дисковода.
Плата основания 16 служит в качестве основания для других компонентов дисковода 10, для их позиционирования и ориентирования по отношению друг к другу. Предпочтительно, плата основания 16 выполняется из стальной отливки.
Как показано на фиг. 2, блок 20 линейных исполнительных механизмов 20 включает пару исполнительных механизмов с линейными обмотками 23. Каждый исполнительный механизм с линейной обмоткой 23 состоит из направляющей 34, которая жестко скреплена с платой основания 16. Направляющие 34 существенно параллельны одна другой. Рядом с каждой из направляющих находится полюсный наконечник 32. Часть каждого полюсного наконечника окружает одна из обмоток 23 исполнительного механизма. Каждая обмотка 23 прикреплена к противоположной части блока 22 каретки линзы, так что при селективном возбуждении обмотки 23 блок 22 каретки линзы перемещается по направляющим 34. Обмотки 23 исполнительного механизма возбуждаются сигналами с платы 26 схемы возбуждения, что приводит к линейному перемещению блока 22 каретки линзы относительно оптического модуля 24 и относительно соответствующего диска (не показан), введенного в дисковод 10. Таким образом, блок 22 каретки линзы осуществляет грубый трекинг диска.
Оптический модуль 24 и блок 22 каретки линзы вместе образуют основные оптические элементы дисковода 10. Оптический модуль 24 жестко скреплен с платой основания 16 и содержит лазер, различные датчики и оптические элементы (не показаны). При работе устройства лазер направляет пучок излучения от оптического модуля 24 в направлении блока 22 каретки линзы, а оптический блок 24, в свою очередь, принимает обратный луч (не показан) от блока 22 каретки линзы. Блок 22 каретки линзы прикреплен к блоку 20 линейных исполнительных механизмов, как указано выше. Блок 22 каретки линзы содержит пентапризму (не показана), линзу объектива (не показана), сервоприводы (не показаны) для фокусировки линзы объектива и сервоприводы (не показаны) для точной юстировки положения линзы объектива относительно положения блока 20 линейного исполнительного механизма и введенного диска, для обеспечения точного трекинга диска. Электрические информационные и управляющие сигналы передаются между блоком 23 каретки линзы и главной схемной платой 30, с одной стороны, и схемной платой 26 дисковода, с другой стороны, посредством гибкого соединителя 28.
Схемная плата 27 оптического модуля содержит возбудитель лазера и предварительные усилители (не показаны). Схемная плата 26 дисковода управляет электроприводом 18 шпинделя, исполнительными механизмами 23 с линейными обмотками блока 20 линейных исполнительных механизмов и сервоприводами блока 22 каретки линзы. Схемная плата 26 управляется посредством главной схемной платы 30. Главная схемная плата 30 содержит электронные компоненты, для которых различные соображения при проектировании (например, снижение шумов, электромагнитные помехи и потери мощности) не позволяют разместить их на схемной плате 27 оптического модуля или на схемной плате 26 возбуждения.
Электродвигатель 18 шпинделя жестко закреплен на плате основания 16. Электродвигатель 18 непосредственно приводит во вращение шпиндель 17, который, в свою очередь, вращает диск.
Оптика: Оптический модуль и блок линзы объектива
На фиг.4А показан вид сверху в сечении оптического модуля 24. Оптический модуль 24 содержит корпус 40, полупроводниковый лазерный диод 42, коллимирующие линзы 44, призму ахроматизации 46, призму анаморфического растяжения 48, расщепитель пучка с рассеянием 49, DFTR-призму 50, цилиндрические линзы 51, линзу считывания 52, микропризму 54, датчики следящего детектора 56 и 58, передний датчик 60 и датчик детектора данных 62. Эти элементы также показаны на фиг. 4В, на которой представлена схема оптического канала распространения лазерного луча 64. На фиг.4В показаны элементы оптического модуля 24 во взаимосвязи с пентапризмой 66 и линзой объектива 68 блока 22 каретки линзы. Для простоты иллюстрации на фиг.4В часть 70 лазерного пучка 64 между пентапризмой 66 и линзой 68 объектива показана лежащей в той же плоскости, что и лазерного пучка 64, которые проходят через оптический модуль 24. В действительности, пентапризма 66 размещена так, чтобы направлять часть 70 лазерного пучка перпендикулярно частям лазерного пучка 64, которые проходят через оптический модуль 24.
Как показано на фиг.4В, ясно, что лазерный пучок 64 представляет собой коллимированный пучок, сформированный линзами 44 из расходящегося пучка, излученного лазерным диодом 42. Луч 64 проходит через призмы 46 и 48, через расщепитель пучка 49 и выходит из оптического модуля 24 к блоку 22 каретки линзы. Там он проходит через пентапризму 66 и фокусируется на поверхности диска посредством линзы объектива 68.
После отражения от диска отраженная часть лазерного пучка 64 возвращается через линзу объектива 68 и пентапризму 66 и повторно входит в оптический модуль 24. Первая часть пучка 64 отражается от поверхности раздела расщепителя пучка между призмой 48 и расщепителем 49, проходит и фокусируется линзой считывания 52 и входит в микропризму 54. Там пучок расщепляется на две части соответственно поляризации, и каждая часть детектируется отдельным элементом датчика детектирования данных 62.
Вторая часть пучка 64 проходит через расщепитель пучка 49 и внутренне отражается в анаморфическую призму 48. Эта вторая часть пучка 64 выходит из анаморфической призмы 48 и попадает в DFTR-призму 50. Там эта вторая часть пучка 64 делится на две части, каждая из которых фокусируется цилиндрическими линзами 51 на соответствующих поверхностях соответствующих следящих датчиков 56 и 58. В ответ на это датчики 56 и 58 генерируют сигналы, которые направляются в схемную плату 27 оптического модуля, где эти сигналы используются для формирования сигналов ошибки трекинга и фокусировки.
Электронные системы: Главная схемная плата, плата схемы возбуждения и схемы оптического модуля
Вернемся к рассмотрению фиг.1, 2, 4А и 5. На фиг.5 представлена блок-схема электронных подсистем дисковода 10, где блок 80 включает предварительный усилитель 82 датчика считывания, возбудитель 84 лазера и предварительные усилители 86 следящих датчиков. Как показано на фиг.4А и 5, предварительный усилитель 82 датчика считывания соединен с датчиком детектора данных 62 и усиливает сигнал, генерируемый детектором данных 62. Аналогично, предварительные усилители 86 следящих датчиков соединены со следящими детекторами 56 и 58 и усиливают сигналы, формируемые следящими детекторами 56 и 58. Лазерный диод 42 соединен с возбудителем 84 лазера, формирующим сигнал возбуждения лазера 42. Подсистемы 82, 84 и 86 блока 80 сгруппированы вместе на схемной плате 27 оптического модуля, размещенной рядом с оптическим модулем 24. Это минимизирует расстояние, проходимое сигналами от датчиков 62 до предварительного усилителя 82 и от датчиков 56 и 58 до предварительных усилителей 86, для снижения отрицательного влияния шумов на эти сигналы. Поскольку сигнал, который возбудитель 84 генерирует для возбуждения лазерного диода 42, является относительно высокочастотным, то правильная практика проектирования требует, чтобы лазерный возбудитель 84 был размещен рядом с лазерным диодом 42.
Блок 88 на фиг.5 включает блок сопряжения 90 с электродвигателем шпинделя, блок сопряжения 94 с датчиком положения, блок переключателей и дисплеев 96. Компоненты 90, 92, 94 и 96 блока 88 размещены на плате 26 схемы возбудителя. Блок сопряжения 90 электродвигателя шпинделя управляет двигателем 18 шпинделя. Блок сопряжения 92 обеспечивает сопряжение с различными дисплеями и переключателями 96, включая дисплеи передней панели, схему выталкивания кассет, переключатели, связанные с кареткой 12 диска. Блок сопряжения 94 датчика положения связывает исполнительные механизмы 23 блока 20 исполнительных механизмов, которые запитываются усилителями мощности 102.
Остальные подсистемы в блок-схеме по фиг.5 находятся на главной схемной плате 30, показанной на фиг.3. Эти подсистемы включают аналоговый канал считывания 100, кодер/декодер 104, микросхему 106 интерфейса малых вычислительных систем (интерфейса SCSI), буферный блок 108 и GLIC-интерфейс 110 с электронно-стираемым программируемым постоянным запоминающим устройством (ЭСППЗУ) 112. Главная схемная плата 30 также включает схему аналогового интерфейса 114 и цифровой процессор сигналов 116, встроенный контроллер 118 с ЗУ с произвольной выборкой (ЗУПВ) и стираемым ПЗУ (СППЗУ) 120. Заметим, что в случае дисководов 10, являющихся дисководами с магнитооптической записью, усилители мощности 102 также возбуждают катушку смещения 122.
Устройство загрузки кассет
На фиг.6 показана система записи на магнитных дисках 1-10. На фиг.6 представлена съемная кассета 1-13 диска, размещенная для ввода в дисковод 1-10, включающий устройство загрузки и выгрузки, соответствующее настоящему изобретению.
Дисковод 1-10 включает нижний корпус 1-16 и фронтальную плату 1-19. Фронтальная плата 1-19 включает отверстие для приема диска 1-22, контрольную лампочку 1-25 индикации работы дисковода и кнопку выброса 1-28 кассеты.
Дисковод 1-10 имеет механизм фокусирования и механизм трекинга, линзу и считываемый диск, причем механизмы управляются цепью обратной связи, включающей электронную схему для формирования сигнала слежения для осуществления коррекции работы механизмов фокусировки и трекинга, первое средство для снижения воздействия нежелательных механических сил на подвижный компонент дисковода и второе средство для поддержания первого средства между этим компонентом и источником нежелательных механических сил, благодаря чему обеспечивается механическая развязка указанного компонента. Эти аспекты настоящего изобретения детально будут описаны ниже в соответствующих разделах описания, посвященных рассмотрению конкретных особенностей изобретения.
Внешний корпус кассеты 1-13 диска обычного типа включает верхнюю плоскую поверхность 1-31 и нижнюю плоскую поверхность 1-32, которая показана на фиг. 25. Кассета 1-13 диска также имеет переднюю торцевую стенку 1-34 с маркировкой. В предпочтительном варианте изобретения передняя торцевая стенка 1-34 кассеты 1-13 диска остается видимой для пользователя при введении кассеты 1-13 в дисковод 1-10. Боковые стенки, например, боковая стенка 1-37 проходит между верхней плоской поверхностью 1-31 и нижней плоской поверхностью 1-32, и кроме того, кассета имеет заднюю стенку 1-38 между верхней плоской поверхностью 1-31 и нижней плоской поверхностью 1-32, проходящую параллельно передней торцевой поверхности 1-34 с маркировкой. Рядом с торцом 1-34 боковых стенок 1-37 находятся каналы 1-40 для размещения штырей установки 1-43 кассеты (фиг.8А-8В), расположенных на плате основания 1-46.
Кассета 1-13 диска также имеет заслонку 1-49, подпружиненную в закрытом положении (фиг. 6, 7 и 16). Когда заслонка 1-49 открыта, она опирается на углубленную часть 1-52 верхней плоской поверхности 1-31. Поскольку накопитель в предпочтительном варианте выполнения осуществляет считывание двусторонних кассет 1-13 дисков, аналогичная заслонка и углубленная часть имеются на нижней плоской поверхности 1-32, но эти признаки не показаны на чертежах. Заслонка в типовом случае имеет защелку 1-55 (не показано) на задней стенке 1-38 кассеты 1-13 диска 1-13.
Внутри кассеты 1-13 располагается диск 1-14 (фиг.23-25), имеющий металлическую втулку 1-15. Как известно из уровня техники, диск 1-14 может быть изготовлен в виде жесткого субстрата, имеющего покрытие из магнитного материала. В покрытии из магнитного материала выполнены дорожки в форме концентрических или спиральных колец. Магнитное покрытие может быть как на одной, так и на обеих поверхностях жесткого субстрата, при этом покрытие обеспечивает осуществление магнитной записи данных на диске 1-14 с помощью преобразователей, обычно называемых головками. В центре жесткого субстрата находится металлическая втулка 1-15.
На фиг.7 показаны основные компоненты дисковода 1-10, согласно настоящему изобретению. Показан нижний корпус 1-16, на котором расположена плата основания 1-46. Электродвигатель 1-61 шпинделя установлен на плате основания 1-46. Электродвигатель 1-61 шпинделя включает магнит 1-63 шпинделя, который притягивает металлическую втулку 1-15 диска 1-14 (фиг.23-25), когда кассета 1-13 диска установлена в дисководе 1-10. Механизм выталкивания кассет, согласно настоящему изобретению, обозначен общей позицией 1-67. Механизм выталкивания 1-67 включает левый башмак-ползун 1-70, правый башмак-ползун 1-73 и рычаг 1-76. Механизм выталкивания 1-67 описан более детально ниже. Установочный рычаг 1-79 также показан на фиг.7 в положении над левым башмаком-ползуном 1-70. Приемник кассет обозначен общей позицией 1-82. Также на фиг.7 показаны левая тяга 1-85 заслонки, правая тяга 1-88 заслонки и заслонка 1-91, каждая из которых закреплена с возможностью поворота на приемнике 1-82 кассет. Фронтальная плата 1-19 дисковода показана перед приемником 1-82 кассет. Наконец, показан поворотный блок 1-94 катушки магнитного смещения, закрепленный на рычаге 1-97 катушки смещения с зажимами 1-100 катушки смещения, показанными над рычагом 1-97 катушки смещения. Дополнительные сведения об этих компонентах будут приведены ниже.
На фиг. 7 также показано, что нижний корпус 1-16 имеет боковые стенки 1-103 и заднюю стенку 1-106. На внутреннем основании нижнего корпуса 1-16 имеются четыре установочные позиции 1-109, на которых закреплена плата основания 1-46. Нижний корпус 1-16 также содержит электронные элементы управления, которые не показаны на чертежах.
На фиг. 8А и 8В представлены детали конструкции платы основания 1-46. Плата основания 1-46 установлена на четырех установочных позициях 1-109 (фиг. 7) нижнего корпуса 1-16. Плата основания 1-46 имеет множество компонентов, впрессованных в нее, заделанных, скрепленных или связанных с ней. Плата основания 1-46 представляет собой тот скрепляющий компонент, который объединяет воедино множество элементов, характеризующих настоящее изобретение, и обеспечивает их взаимодействие. На периферии платы основания 1-46 имеются передняя стенка 1-112, левая внешняя боковая стенка 1-115, левая внутренняя боковая стенка 1-118, правая внешняя боковая стенка 1-121, правая внутренняя боковая стенка 1-124 и задняя вертикальная стенка 1-127. Левая и правая внешние боковые стенки 1-115 и 1-121 соответственно включают каждая вертикальную щель 1-130, 1-133. Левая вертикальная щель обеспечивает размещение левого подъемного штифта 1-136 (фиг.15А) на приемнике 1-82 кассет, когда приемник 1-82 кассет позиционирован относительно платы основания 1-46. Правая вертикальная щель 1-133 аналогичным образом обеспечивает размещение правого подъемного штифта 1-139 (фиг.15В) приемника 1-82 кассет.
Два штыря 1-43 для установки кассеты (фиг.8В) размещены рядом с передними торцами левой и правой внешних боковых стенок 1-115, 1-121 соответственно. Эти штифты 1-43 для установки предназначены для введения в каналы 1-40 кассеты (фиг.6). Когда штифты 1-43 расположены в каналах 1-40, штифты 1-43 удерживают кассету 1-13 диска и препятствуют ее перемещению как в боковом направлении (в стороны), так и продольно (вперед и назад).
Опора 1-142 электродвигателя шпинделя отформована в плате 1-46 основания. Электродвигатель 1-61 шпинделя (фиг.7) может поддерживаться на опоре 1-142 электродвигателя шпинделя, например, пружинными зажимами (не показаны), прикрепленными к промежуточному ребру 1-145.
Плата основания 1-46 имеет различные оси и крепежные штифты, связанные с ней. Например, ось качания 1-148 рычага установлена на плате основания 1-45 рядом с опорой 1-142 электродвигателя шпинделя. Штифт 1-151 пружины рычага закреплен внизу платы основания 1-46 рядом с передней стенкой 1-112 (фиг. 8А). Другие штифты, закрепленные внизу платы основания 1-46 рядом с передней стенкой 1-112, действуют как поворотные оси для зубчатой передачи механизма выталкивания. Плата основания 1-46 также включает канал 1-154 левого башмака-ползуна и канал 1-157 правого башмака-ползуна. Каналы 1-154 и 1-157 проходят вдоль сторон платы основания 1-46. Канал 1-154 левого башмака-ползуна образован между левой внешней боковой стенкой 1-115 и левой внутренней боковой стенкой 1-118. Левый башмак-ползун 1-70 при его установке находится между левой внутренней боковой стенкой 1-118 и левой внешней боковой стенкой 1-115 и перемещается в левом канале 1-154 (см. фиг.9, 13 и 16А). Аналогично, канал 1-157 правого башмака-ползуна образован между правой внешней боковой стенкой 1-121 и правой внутренней боковой стенкой 1-124. Правый башмак-ползун 1-73 при его установке находится между правой внутренней боковой стенкой 1-124 и правой внешней боковой стенкой 1-121 и перемещается в правом канале 1-157. Левый и правый башмаки-ползуны 1-70 и 1-73 соответственно могут удерживаться в соответствующих каналах 1-154, 1-157, например, язычками на подпружиненных зажимах (не показаны), которые удерживают электродвигатель 1-61 шпинделя на его опоре 1-142.
В конце канала 1-157 правого башмака-ползуна, рядом с правой вертикальной стенкой 1-127, образовано гнездо 1-160 в плате основания 1-46, где задняя сторона внутренней боковой стенки 1-124 сливается с задней стороной правой внешней боковой стенки 1-121. Это гнездо 1-160 предназначено для размещения оси поворота 1-163 (фиг.17В и 17А) защелки 1-166 приемника. Защелка 1-166 приемника имеет вертикальную поверхность 1-169 (фиг.17В), на которую воздействует расцепляющий выступ 1-172 (фиг.7 и 16А), закрепленный на правой тяге 1-88 заслонки, для размыкания защелки 1-166 приемника.
Плата основания 1-46 имеет отверстие 1-175 в правой вертикальной стенке 1-127. Лазерный диод 42 (не показан), который должен быть расположен позади задней вертикальной стенки между левой угловой стойкой 1-178 и правой угловой стойкой 1-181, излучает через отверстие 1-175 в каретку 1-184 (лучше показанную на фиг.9, 13А, 16А и 16В), которая содержит оптические элементы, фокусирующие лазерный пучок на информационной дорожке на диске 1-14. Каретка 1-184 будет рассмотрена ниже.
Плата основания 1-46 также имеет отверстие 1-187, выполненное в ней для установки поворотной оси 1-190 (фиг.14В) установочного рычага 1-79. Это отверстие 1-187 выпрессовано в левой внутренней боковой стенке 1-118. На фиг. 9, например, показан установочный рычаг 1-79 в положении, при котором его поворотная ось 1-190 находится в отверстии 1-187. Дисковод 1-10 включает оптический модуль 1-189, который выполнен аналогично оптическому модулю 24, упомянутому выше.
На фиг.14А-14С показано детальное выполнение установочного рычага 1-79. Помимо поворотной оси 1-190, установочный рычаг 1-79 включает прижимной конец 1-193. Установочный рычаг 1-79 имеет вилку 1-196, образованную на конце, удаленном от прижимного конца 1-193. Вилка 1-196 имеет длинную сторону 1-199 и короткую сторону 1-202. Когда установочный рычаг позиционирован, вилка 1-196 охватывает выступ 1-205 (фиг.11С) на левом башмаке-ползуне 1-70. Установочный рычаг в положении, когда его вилка 1-196 охватывает выступ 1-205 правого башмака-ползуна 1-70, лучше показан на фиг.9, 13, 16А и 16В. Положение установочного рычага 1-79 при этом определяется расположением левого башмака-ползуна 1-70 в левом канале 1-154.
Как видно из фиг.13, установочный рычаг 1-79 обеспечивает установку каретки 1-184. Каретка 1-184 фокусирует лазерный луч, приходящий через отверстие 1-175 (фиг.8А и 8В) в задней вертикальной стенке 1-127 платы основания 1-46. В частности, каретка позиционирует лазерный луч над центром дорожки, содержащей считываемые данные. Каретка 1-184 перемещается по опорным направляющим 1-208, фиг.9. Обычный магнитный блок перемещает каретку 1-184 по направляющим 1-208. Когда приемник 1-82 каретки находится в поднятом положении, установочный рычаг 1-79, который приводится в действие левым башмаком-ползуном 1-70, удерживает каретку 1-184 у задней части дисковода. Это положение показано на фиг. 9 и 16А и иллюстрируется с помощью фиг.13, где установочный рычаг 1-79 показан сплошной линией. Когда левый башмак-ползун перемещен вперед рычагом 1-76 в процессе выталкивания кассеты 1-13 диска, установочный рычаг 1-79 поворачивается посредством выступа 1-205, прижимающегося к короткой стороне 1-202 вилки 1-196, пока прижимной конец 1-193 установочного рычага 1-79 удерживает каретку 1-184 у задней стороны дисковода 1-10. Когда приемник 1-82 кассет находится в своем нижнем положении, левый башмак-ползун 1-70 приведен к задней стороне дисковода 1-10 посредством рычага 1-76. При этом условии выступ 1-205, который был перемещен назад посредством левого башмака-ползуна 1-70, повернул установочный рычаг 1-79 к передней стороне дисковода 1-10. Когда левый башмак-ползун 1-70 и установочный рычаг 1-79 находятся в этом положении, на каретку 1-184 не воздействует прижимной конец 1-193 установочного рычага 1-79 и она может перемещаться свободно ниже диска 1-13 в дисководе 1-10.
Механизм выталкивания 1-67 лучше всего виден на фиг.7 и 9. Он содержит следующие основные компоненты. Электродвигатель выталкивания кассет 1-209 запитывает механизм выталкивания. В частности, электродвигатель выталкивания 1-209 приводит в действие зубчатую передачу, которая приводит в действие выходной кулачок, который, в свою очередь, воздействует на рычаг 1-76 (фиг.9) для поворота в первом направлении (против часовой стрелки на фиг.9), при этом выталкивая кассету 1-13 диска из дисковода 1-10. В начале процесса выталкивания электродвигатель 1-209 приводит в действие соответствующую червячную передачу 1-211. Червячная передача 1-211 закреплена на центральном валу электродвигателя выталкивания 1-209. Эта червячная передача 1-211 приводит в действие первое большое зубчатое колесо 1-214, вращающееся относительно первой оси 1-217. Этот поворот первого большого зубчатого колеса 1-214 приводит во вращение первое малое зубчатое колесо 1-220, которое закреплено внизу первого большого зубчатого колеса 1-214 для осуществления вращения совместно с ним относительно первой оси 1-217. Первое малое зубчатое колесо 1-220 перемещает второе большое зубчатое колесо 1-223 относительно второй оси 1-226. Второе малое зубчатое колесо 1-229 закреплено сверху второго большого зубчатого колеса 1-223 для осуществления вращения совместно с ним относительно второй оси 1-226. Второе малое зубчатое колесо 1-229, в свою очередь, приводит во вращение третье большое зубчатое колесо 1-232 относительно третьей оси 1-235. Это третье большое зубчатое колесо 1-232 приводит в действие кулачок 1-238, который обуславливает поворот рычага 1-76 относительно оси 1-148 рычага.
Рычаг 1-76 будет описан со ссылками на фиг.10А-10F и фиг.9. Рычаг 1-76 установлен с возможностью поворота на плате основания 1-46 относительно оси 1-148. Ловушка 1-239 пружины рычага выполнена на заостренной части рычага 1-76. Пружина 1-241 рычага (фиг.9) закреплена между ловушкой 1-239 пружины рычага и штифтом 1-151 пружины рычага. Пружина 1-241 смещает рычаг 1-76 во втором направлении (по часовой стрелке на фиг.9) относительно оси 1-148 рычага. Это направление загрузки кассеты, которое перемещает правый башмак-ползун вперед, а левый башмак-ползун 1-70 назад для установки кассеты 1-13 диска на шпиндель электродвигателя 1-61. Рычаг кроме того содержит юбку или перегородку 1-244, которая проходит сверху зубчатой передачи рычага и тем самым помогает удерживать зубчатые колеса в положении на соответствующих осях. Конец рычага, ближний к юбке 1-244 рычага, содержит U-образную вилку 1-247, а конец рычага, удаленный от юбки 1-244, содержит аналогичную U-образную вилку 1-250. U-образная вилка 1-247 выполнена с возможностью поворота относительно цилиндрической соединительной стойки 1-253 левого башмака-ползуна 1-70 (фиг.11с). Аналогично, U-образная вилка 1-250 рычага 1-76 выполнена с возможностью поворота относительно цилиндрической соединительной стойки 1-256 (фиг.12Е) правого башмака-ползуна 1-73. Рычаг 1-76 тем самым с возможностью поворота соединяется с передними концами левого и правого башмаков-ползунов 1-70, 1-73 соответственно. Кроме того, поскольку левый и правый башмаки-ползуны 1-70, 1-73 удерживаются в соответствующих им каналах 1-154, 1-157 посредством пружинных зажимов (не показаны), которые также удерживают электродвигатель шпинделя 1-61 в его положении, рычаг 1-76 удерживается на свой оси 1-148 за счет взаимодействия между U-образными вилками 1-247, 1-250 и цилиндрическими соединительными стойками 1-253, 1-256.
Когда рычаг 1-76 поворачивается в первом направлении (против часовой стрелки на фиг. 9), левый башмак-ползун 1-70 перемещается вперед в канале 1-154, в то время как правый башмак-ползун 1-73 одновременно перемещается назад в правом канале 1-157. Таким образом, поворот рычага 1-76 в первом направлении (против часовой стрелки на фиг.9) поднимает приемник 1-82 кассеты, так что кассета 1-13 диска может быть вытолкнута или загружена в дисковод 1-10. С другой стороны, когда рычаг 1-76 поворачивается во втором направлении (по часовой стрелке на фиг.9), левый башмак-ползун 1-70 перемещается назад в левом канале 1-154, в то время как правый башмак-ползун одновременно перемещается вперед в правом канале 1-157. Поворот рычага 1-76 в этом направлении опускает приемник 1-82 кассеты, помещая диск на шпиндель электродвигателя. Подъем и опускание приемника 1-82 кассет за счет поворота рычага дополнительно обсуждается ниже.
Как указано выше, левый башмак-ползун 1-70 перемещается в левом канале 1-154, а правый башмак-ползун 1-73 перемещается в правом канале 1-157 под воздействием рычага 1-76. Дополнительные детали, касающиеся ползунов 1-70, 1-73, приведены ниже.
В соответствии с фиг.11А-11С, особенности выполнения левого башмака-ползуна 1-70 состоят в следующем. Левый башмак-ползун включает цилиндрическую соединительную стойку 1-253 на своем переднем конце. Выступ установочного рычага 1-205 выполнен на первой заглубленной части 1-259. Установочный рычаг 1-79 перемещается вдоль первой заглубленной части 1-259 левого башмака-ползуна 1-70 под воздействием выступа 1-205. В левом башмаке-ползуне 1-70 выполнена S-образная щель 1-262. Когда левый башмак-ползун 1-70 позиционирован в левом канале 1-154, S-образная щель 1-162 открыта в сторону левой внешней боковой стенки 1-115, рядом и позади левой вертикальной щели 1-130. Когда приемник 1-82 кассет позиционирован относительно пластины основания 1-46, левый подъемный штифт 1-136 (фиг.15А) приемника 1-82 кассет перемещается в левой вертикальной щели 1-130 платы основания 1-46. Левый подъемный штифт длиннее, чем толщина левой внешней стенки 1-115. Поэтому левый подъемный штифт 1-136 выступает из левой вертикальной щели 1-130 и перемещается в S-образной щели 1-262 в левом башмаке-ползуне 1-70. Когда приемник 1-82 кассет таким образом позиционирован относительно платы основания 1-46, причем левый подъемный штифт 1-136 перемещается в вертикальной щели 1-130 и S-образной щели 1-262, приемник 1-82 кассет ограничен в своем перемещении вперед и назад и может перемещаться только вверх и вниз по вертикали. Вертикальная щель 1-130 ограничивает перемещение вперед-назад приемника 1-82 кассет, в то время как S-образная щель 1-262 в левом башмаке-ползуне 1-70 определяет высоту по вертикали приемника кассет. Иными словами, в зависимости от того, какая часть S-образной щели 1-262 находится за вертикальной щелью 1-130 в любой данный момент времени, приемник 1-92 кассет может находиться в своем самом верхнем положении, в самом нижнем положении или в некотором положении между этими двумя крайними положениями.
Вторая заглубленная часть 1-265 имеется наверху левого башмака-ползуна 1-70. Горизонтальный штифт (не показан) может быть прикреплен к плате основания 1-46, так чтобы обеспечивать перемещение вдоль второй заглубленной части 1-265. Этот горизонтальный штифт (не показан) будет ограничивать крайнее переднее и крайнее заднее положения левого башмака-ползуна 1-70, так как штифт будет упираться в края второй заглубленной части 1-265 после достижения одного из крайних положений левого башмака-ползуна.
Крайний задний конец левого башмака-ползуна 1-70 имеет вырез 1-268, который лучше всего виден на фиг.11В и фиг.7. Вырез 1-268 находится на смещенной концевой части 1-272 левого башмака-ползуна 1-70. Вырез 1-268 взаимодействует с плечом 1-275 рычага катушки смещения 1-97, фиг.7. Это плечо 1-275 рычага поворачивает рычаг 1-97 катушки смещения в зависимости от положения левого башмака-ползуна 1-70, в частности, положения выреза 1-268. Смещенная концевая часть 1-272 левого башмака-ползуна 1-70 перемещается в вырезе 1-278 (фиг.8В) в левой внешней стенке 1-115 платы основания 1-46.
Со ссылками на фиг.12А-12Е будет представлено выполнение правого башмака-ползуна 1-73. Как указано выше, рычаг 1-76 соединен с правым башмаком-ползуном 1-73 посредством цилиндрической соединительной стойки 1-256. Правый башмак-ползун 1-73 имеет S-образную щель 1-281, образованную в нем. Эта S-образная щель 1-281 представляет собой перевернутый (зеркально симметричный) вариант S-образной щели 1-262 в левом башмаке-ползуне 1-70. Это хорошо видно из фиг. 7, из рассмотрения которой становится очевидным, что когда башмаки-ползуны 1-70, 1-73 соединены с рычагом 1-76, S-образные щели 1-262, 1-281 представляют собой зеркальные отображения друг друга. Такое устройство необходимо, поскольку башмаки-ползуны 1-70, 1-73 перемещаются в противоположных направлениях под воздействием рычага 1-76. S-образная щель 1-281 в правом башмаке-ползуне 1-73, таким образом, открыта в сторону правой внешней стенки 1-121, когда правый башмак-ползун 1-73 находится в своем рабочем положении в правом канале 1-157. Аналогично тому, что было указано выше для левого башмака-ползуна 1-70, когда приемник 1-82 кассет позиционирован относительно платы основания 1-46, правый подъемный штифт 1-139 (фиг. 15В) перемещается в правой вертикальной щели 1-133 (фиг.8В). Поскольку правый подъемный штифт 1-139 длиннее, чем толщина правой внешней боковой стенки 1-121, то правый подъемный штифт 1-139 выступает относительно правой внешней боковой стенки 1-121 в правой вертикальной щели 1-133 и перемещается в S-образной щели 1-281 в правом башмаке-ползуне 1-73. Правая вертикальная щель 1-133 ограничивает правый подъемный штифт от перемещения параллельно продольной оси платы основания 1-46 (т.е. параллельно линии, проходящей перпендикулярно через переднюю стенку 1-112 и заднюю вертикальную стенку 1-127). Поскольку правый подъемный штифт 1-139 перемещается в S-образной щели 1-281, высота по вертикали для приемника 1-82 кассет определена положением правого подъемного штифта 1-139 в S-образной щели 1-281. S-образная щель 1-281 в правом башмаке-ползуне 1-73 перемещается за правой вертикальной щелью 1-133 с той же скоростью, что и S-образная щель 1-262 в левом башмаке-ползуне 1-70 за левой вертикальной щелью 1-130, но в противоположном направлении. Выполнение в виде зеркального отображения S-образных щелей 1-262, 1-281 гарантирует, что левый и правый подъемные штифты 1-136, 1-139 соответственно удерживаются существенно на той же самой высоте над платой основания 1-46 в любой конкретный момент времени.
Как показано на фиг.12А-12Е, правый ползун-башмак 1-73 имеет следующие дополнительные особенности. На верхней поверхности правого башмака-ползуна выполнена заглубленная часть 1-284. Штифт (не показан) может быть установлен горизонтально напротив правого канала 1-157, так чтобы перемещаться вдоль заглубленной поверхности 1-284. Горизонтальный штифт, перемещающийся вдоль заглубленной поверхности 1-284, будет ограничивать максимальные перемещения вперед и назад правого башмака-ползуна 1-73, поскольку горизонтальный штифт будет упираться в края заглубления 1-284 в крайних положениях правого башмака-ползуна 1-73. Правый башмак-ползун 1-73 также имеет вырезанную область 1-287 для размещения выступа (лапки) 1-290 (фиг.17А и 17В) фиксатора 1-166 приемника. Приподнятая часть 1-293 предусмотрена на правом конце правого башмака-ползуна 1-73. Когда рычаг 1-76 поворачивается в первом направлении (против часовой стрелки, например, как на фиг.13), приводя правый башмак-ползун 1-73 назад в правом канале 1-157, происходит фиксация между лапкой 1-290 фиксатора 1-166 приемника и приподнятой частью 1-293 правого башмака-ползуна 1-73. В частности, первая скользящая поверхность 1-296 (фиг.17А), которая расположена на лапке 1-290, скользит по второй скользящей поверхности 1-299 (фиг.12С и 12Е), которая расположена на приподнятой части 1-293 правого башмака-ползуна 1-73. Когда поверхности 1-296 и 1-299 проскальзывают относительно друг друга, лапка 1-290, подпружиненная в направлении, показанном стрелкой 1-302 на фиг.17А, входит в вырез 1-287 в правом башмаке-ползуне 1-73, благодаря чему правый башмак-ползун 1-73 удерживается в заднем положении и, следовательно, удерживает приемник 1-82 кассеты в его крайнем верхнем положении. Когда приемник кассеты находится в этом положении, кассета 1-13 диска в дисководе 1-10 будет выталкиваться или будет загружаться в дисковод 1-10.
S-образные щели 1-262 и 1-281 в левом и правом ползунах 1-70, 1-73 соответственно играют существенную роль в осуществлении действия "отслаивания", выполняемого согласно изобретению при загрузке кассеты диска на шпиндель электродвигателя и выгрузке с него кассеты диска. Эта функция S-образных щелей 1-262, 1-281, обеспечивающая такую манипуляцию кассетой диска, поясняется ниже.
Со ссылками на фиг.15А и 15В будут описаны приемник 1-82 кассеты и компоненты, закрепленные на нем. Приемник 1-82 кассеты представляет собой деталь, отформованную под давлением из пластмассы, к которой дополнительно добавлены левая тяга заслонки 1-85 (фиг.7) и правая тяга заслонки 1-88. Когда дисковод находится в полностью собранном виде, приемник 1-82 кассеты проходит по внешней стороне левой и правой внешних боковых поверхностей 1-115, 1-121 платы основания 1-46. Приемник 1-82 кассеты проходит вертикально вверх и вниз, когда подъемные штифты 1-136, 1-139 перемещаются вверх и вниз, отслеживая соответствующие S-образные щели 1-262, 1-281. Приемник 1-82 кассеты также наклоняется слегка вверх и вниз относительно мнимой поперечной оси, проходящей через левый и правый подъемные штифты 1-136, 1-139. Именно этот легкий наклон во взаимосвязи с перемещением вверх и вниз формирует указанное выше действие "отслаивания" (снятия) кассеты, обеспечиваемое изобретением. Приемник 1-82 кассеты может быть защелкнут или отделен от остального механизма, если крышка дисковода 1-10 снята.
Приемник 1-82 кассеты имеет левый приемный канал 1-305 кассеты и правый приемный канал 1-308 кассеты, образованные в нем. Амортизатор 1-311 размещен в задней части правого приемного канала 1-308, препятствуя неправильному введению кассеты 1-13 диска. Как видно из фиг.6 и 7, кассета 1-13 диска имеет пару щелей 1-314, выполненных в боковых стенках 1-37. Если кассета 1-13 введена правильно, задней стенкой 1-38, вводимой в приемное отверстие 1-22 первой, то одна из щелей 1-314 кассеты 1-13 будет обеспечивать размещение в ней упорного амортизатора 1-311 и введение кассеты 1-13 в дисковод 1-10 полностью. Если, с другой стороны, пользователь пытается ввести кассету 1-13 диска передней торцевой стороной с маркировкой 1-34 вперед, то упорный амортизатор 1-311 будет упираться в переднюю торцевую сторону 1-34 кассеты, тем самым препятствуя введению кассеты диска в дисковод 1-10 полностью. Задняя стенка 1-317 приемника 1-82 кассеты имеет вырез 1-320. Эта область выреза 1-320 позволяет расцепляющему выступу 1-172 (фиг.16) на правой тяге заслонки 1-88 упираться о вертикальную поверхность 1-169 (фиг.17В) фиксатора 1-166 приемника. Поскольку левая и правая тяги заслонки 1-85 и 1-88 соответственно поворачиваются к задней стенке дисковода 1-10, когда кассета 1-13 диска вводится в приемник 1-82 кассеты, по мере того как кассета 1-13 приближается к состоянию полного ввода, расцепляющий выступ 1-172 расцепляет фиксатор 1-166 приемника путем нажатия на вертикальную поверхность 1-169 для поворота фиксатора 1-166 приемника. Этот поворот фиксатора 1-166 приемника высвобождает лапку 1-290 из ее зацепления с приподнятой частью 1-293 правого башмака-ползуна 1-73. Когда фиксатор 1-166 приемника расцеплен таким образом, приемник 1-82 кассеты может опускаться, помещая кассету диска в рабочее положение на шпинделе электродвигателя 1-61.
Со ссылками на фиг.7, 15А, 15В, 16А и 16В будет описано крепление левой тяги заслонки 1-85 и правой тяги 1-88 заслонки к кассете 1-82 приемника. Левая и правая тяги 1-85 и 1-88 соответственно прикреплены к задним углам приемника 1-82 кассеты, вблизи задней стенки 1-317. Более конкретно, левая тяга заслонки 1-85 с возможностью поворота закреплена на приемнике 1-82 кассеты в первой точке качания 1-323, а правая тяга заслонки 1-88 с возможностью поворота закреплена на приемнике 1-82 кассеты во второй точке качания 1-326. Тяги 1-85 и 1-88 смещены с помощью пружины (не показана) к фронтальной плате 1-19 дисковода 1-10. При работе устройства та или другая из тяг 1-85, 1-88 размыкает фиксатор заслонки кассеты и открывает заслонку 1-49, когда кассета 1-13 диска вводится в дисковод 1-10. То, какая из тяг заслонок 1-85 или 1-88 будет открывать заслонку 1-49 кассеты, определяется тем, какая из сторон кассеты 1-13 диска обращена вверх при вводе кассеты 1-13 в дисковод. Если кассета 1-13 вводится первой стороной вверх, то правая тяга 1-88 задействует фиксатор заслонки и открывает заслонку 1-49. Если кассета 1-13 вводится своей второй стороной вверх, то левая тяга 1-85 задействует фиксатор заслонки и открывает заслонку 1-49. Если в дисководе 1-10 нет кассеты, то тяги 1-85 и 1-88 опираются на упоры 1-329 тяг заслонки, которые выполнены за одно целое с приемником 1-82 кассеты. Эти упоры 1-329 обеспечивают то, что свободные концы 1-322 тяг 1-85 и 1-88 надлежащим образом позиционированы для высвобождения фиксатора заслонки и открывают заслонку 1-49 при вводе кассеты 1-13 в дисковод 1-10.
Со ссылками на фиг.18-22 будет описан поворотный блок катушки магнитного смещения 1-94. Блок катушки смещения 1-94 используется при записи и стирании в дисководе 1-10. Блок катушки смещения 1-94 включает стальной стержень 1-335, который охватывает катушка с проводом 1-338. Когда блок катушки смещения 1-94 позиционирован над диском 1-14, как показано на фиг.23, он проходит радиально поперек диска 1-14 и поэтому обеспечивает генерацию сильного магнитного поля вдоль радиальной полоски диска 1-14, проходящей от шпинделя 1-62 (фиг. 23-25) до края диска 1-14. Когда диск 1-14 вращается под блоком катушки смещения 1-94 с помощью электродвигателя 1-61 шпинделя, обеспечивается формирование магнитного поля над всей поверхностью диска 1-14, тем самым обеспечивая возможность пользователю записывать информацию на всех частях диска 1-14 от его крайних внутренних до крайних внешних дорожек. Катушка 1-338 и стержень 1-335 закрыты верхней частью корпуса 1-341, которая установлена на нижней части корпуса 1-334 катушки смещения.
Блок катушки смещения 1-94 установлен на изогнутой пластине 1-347 катушки смещения, фиг. 22, которая, в свою очередь, установлена на кронштейне 1-97 катушки смещения, фиг.21. Кронштейн 1-97 катушки смещения охватывает ширину платы основания 1-46 и с возможностью поворота удерживается с помощью пары зажимов 1-100, фиг.18, на угловых стойках 1-178 и 1-181 (фиг.8А, 8В) платы основания 1-46. Зажимы 1-100 катушки смещения действуют, таким образом, как опоры подшипников, под которыми может поворачиваться кронштейн катушки смещения 1-97. Зажимы 1-100 включают упорный выступ 1-350 (фиг.18), который ограничивает перемещение вперед приемника 1-82 кассеты в процесс выталкивания, как поясняется со ссылками на фиг.23-25. Как указано, кронштейн 1-97 катушки смещения включает плечо рычага 1-275, взаимодействующее с вырезом 1-268 на задней стороне левого ползуна-башмака 1-70 для подъема и опускания блока катушки смещения 1-94. Поскольку плечо рычага 1-275 входит в зацепление с вырезом 1-268 в левом башмаке-ползуне 1-70, то последний контролирует, когда блок катушки смещения 1-97 повернут к кассете 1-13 или отвернут от нее.
Блок катушки смещения 1-94 может поворачиваться относительно точки 1-353 вблизи от его центра и подпружинен в направлении вниз. Поэтому блок катушки смещения 1-94 может оставаться параллельным кассете 1-13 диска, находясь в нижнем положении (т.е. в положении, показанном на фиг.23, когда кассета 1-13 полностью загружена) и находясь в верхнем положении (т.е. в положении, показанном на фиг.25, когда кассета 1-13 диска выгружена). Способность блока катушки смещения 1-94 сохранять параллельность кассете 1-13 диска, находясь в верхнем положении, обеспечивает люфт, требуемый для того, чтобы дисковод 1-10 мог выполнить операцию выталкивания диска, как описано ниже. Когда блок катушки смещения находится в нижнем положении и загружен в кассету 1-13, он опирается на кассету 1-13 в трех местах.
Со ссылками на фиг.23-25 будет описан процесс выталкивания кассеты 1-13 диска из дисковода 1-10. На фиг.23 показана кассета 1-13 в положении, когда втулка 1-15 диска полностью находится на шпинделе 1-62 электродвигателя 1-61. В этом положении блок катушки смещения 1-94 загружен в кассету 1-13 диска через открытую заслонку 1-49. Когда кассета 1-13 полностью загружена таким образом, левый башмак-ползун 1-70 передвинут в его крайнее заднее положение с помощью рычага 1-76. Плечо 1-275 кронштейна 1-97 катушки смещения повернут к задней стороне дисковода 1-10. Этот поворот плеча 1-275 рычага обеспечивает установку блока катушки смещения 1-94 в кассету 1-13 диска. Поскольку подъемные штифты 1-136 и 1-139 приемника 1-82 кассеты ограничены только вертикальным перемещением посредством вертикальных щелей 1-130 и 1-133 (фиг. 8А и 8В), когда левый ползун 1-70 перемещен к задней стороне дисковода 1-10 рычагом 1-76, как показано на фиг.23, приемник 1-82 кассет с помощью его подъемных штифтов 1-133 и 1-136 перемещается к нижней точке S-образных щелей 1-262 и 1-281.
Промежуточный этап цикла выталкивания иллюстрируется с помощью фиг.24. После того как пользователь инициирует выталкивание кассеты 1-13 диска с дисковода 1-10, электродвигатель 1-208 выталкивания (фиг.9) поворачивает рычаг 1-76 в первом направлении (против часовой стрелки на фиг.9). Этот поворот рычага толкает левый ползун 1-70 к передней стороне дисковода 1-10, как показано на фиг.24. Когда левый ползун 1-70 скользит вперед, вырез 1-268 поворачивает плечо 1-275 рычага вперед, при этом поднимая блок катушки смещения 1-94 от кассеты 1-13 диска. Как показано на фиг.24, подъемные штифты 1-136 и 1-139, которые прикреплены к приемнику 1-82 кассет, перемещаются вверх по S-образным щелям 1-262 и 1-281 движением рычага 1-76. Поскольку подъемные штифты 1-136 и 1-139 размещены на приемнике кассет в точке, где поперечная ось, проходящая через оба подъемных штифта 1-136 и 1-139, не будет проходить через шпиндель 1-62, то реализуется действие "отслаивания" для снятия втулки 1-15 диска с магнита 1-64 шпинделя при подъеме приемника 1-82 кассет. Иными словами, как показано на фиг.24, диск 1-14 не поднимается вертикально от шпинделя 1-62 в цикле выталкивания. Напротив, вследствие размещения подъемных штифтов 1-136, 1-139 на приемнике 1-82 кассет, задняя часть кассеты 1-13 диска поднимается раньше передней части кассеты 1-13, когда подъемные штифты 1-136 и 1-139 отслеживают соответствующие им S-образные щели 1-262 и 1-281. Это действие "отслаивания" снижает максимальную силу, требуемую для снятия втулки диска 1-15 с магнитного зажима 1-64 электродвигателя 1-61 шпинделя.
Обращаясь к фиг.24, можно видеть, что после того как приемник 1-82 кассет поднят на некоторую высоту за счет перемещения ползунов 1-70 и 1-73, выступ 1-356 (фиг.15А) на задней стенке 1-317 приемника 1-82 кассет упирается в нижнюю поверхность упорного выступа 1-350 (фиг.18) на зажимах 1-100 катушки смещения. Этот контакт между нижней поверхностью упорного выступа 1-350 и верхней поверхностью выступа 1-356, во взаимосвязи с продолжающимся поворотом рычага 1-76 и результирующим продольным перемещением ползунов 1-70 и 1-73 вызывает небольшой наклон вперед, как показано на фиг.24. Это происходит по существу около точки контакта между упорным выступом 1-350 и выступом 1-356, когда подъемные штифты 1-136 и 1-139 продолжают поднимать приемник. Это движение с незначительным наклоном приемника кассет 1-82 позволяет вышеупомянутое действие "отслаивания" при снятии кассеты.
На фиг.25 представлено положение дисковода 1-10 после завершения движения приемника 1-82 кассет с незначительным наклоном, когда приемник 1-82 упирается в упоры рядом с приемным отверстием 1-22 диска. В этот момент левый ползун 1-70 достиг своего крайнего переднего положения и оттолкнул плечо 1-275 рычага в его крайнее переднее положение, тем самым выведя блок катушки смещения 1-94 из кассеты 1-13 диска. Блок катушки смещения, таким образом, устанавливается параллельно над кассетой 1-13 диска, по существу напротив внутренней стороны верхней поверхности дисковода 1-10 или против платы печатной схемы, размещенной напротив внутренней стороны верхней поверхности дисковода 1-10. Блок катушки смещения 1-94 проходит по вертикали примерно 9 мм из своего положения загрузки в кассету 1-13 диска до описываемого поднятого положения.
Когда приемник 1-82 кассет перемещен в его верхнее положение (примерно на 5 мм выше его крайнего нижнего положения), правый ползун 1-73 (фиг.12А-12Е) фиксируется в его крайнем заднем положении с помощью фиксатора 1-166 приемника (фиг. 17А-17В), как описано выше. Когда приемник 1-82 находится в его верхнем положении, показанном на фиг.25, приемник кассет 1-82 расположен параллельно плате основания 1-46, в состоянии готовности выталкивания кассеты 1-13. Усилие пружины тяг заслонки 1-85 и 1-88, которые смещены к передней стороне дисковода 1-10, как описано выше, и усилие пружины заслонки 1-49 кассеты, которая смещена к закрытому положению, обеспечивают выталкивание кассеты 1-13 из дисковода 1-10, как показано на фиг.25.
Процесс загрузки диска по существу является обратным описанному процессу выталкивания. Поэтому детальное описание процесса ввода диска не приводится.
При осуществлении настоящего изобретения, когда втулка 1-15 снимается с магнита 1-64 шпинделя, требуемое усилие выталкивания эффективно снижается благодаря тому способу, каким диск 1-14 перемещается из положения загрузки в положение выгрузки. При использовании такого действия меньшее усилие требуется для снятия втулки 1-15, чем это имело место в известных системах с вертикальным подъемом. Кроме того, такая конструкция позволяет сэкономить общую высоту дисковода. Вышеописанная конструкция позволяет осуществить снятие втулки диска 1-15 с магнита 1-64 с помощью механизма, использующего располагаемое пространство по сторонам дисковода 1-10, и не требует деталей, которые охватывают ширину платы основания 1-46 для увязывания движения обеих сторон приемника 1-82 кассет с использованием для этого дополнительного пространства по высоте. Другим преимуществом такой конструкции является некритичность большинства требуемых размеров. Кроме того, механизм, приводящий в действие катушку смещения, который осуществляет загрузку блока катушки смещения в кассету 1-13, отличается простотой конструкции и имеет минимальное количество точек износа. Вся конструкция в целом характеризуется простотой сборки и изготовления большинства элементов.
В то время как выше был описан предпочтительный вариант осуществления изобретения, специалистам в данной области техники должно быть ясно, что могут быть произведены различные изменения в пределах объема и сущности изобретения. Например, настоящее изобретение может быть использовано с системами носителей информации, которые не требуют блока катушки смещения 1-94 (например, системы с изменением фазы или системы записи), путем исключения деталей, использованных для задействования кронштейна 1-97 катушки. Кроме того, хотя в предпочтительном варианте использовалась кассета с магнитооптическим диском 5 1/4 дюйм., настоящее изобретение применимо для всех типов носителей и всех размеров дисководов.
Двухосевой исполнительный механизм перемещения катушек
На фиг.26 схематично представлен двухосевой электромагнитный исполнительный механизм 2-10, выполненный согласно настоящему изобретению. Исполнительный механизм 2-10 содержит линзу объектива 2-12, размещенную в держателе 2-14 линзы. Радиальная катушка (катушка трекинга) 2-16 намотана и прикреплена к держателю 2-14 линзы таким образом, что она в принципе размещена перпендикулярно оси Z. Первая и вторая катушки фокусировки 2-18 и 2-10 размещены по сторонам держателя 2-14 линзы и прикреплены к катушке трекинга 2-16 таким образом, что они перпендикулярны оси Y. Первая пара постоянных магнитов 2-22 размещена рядом с первой катушкой фокусировки 2-18, а вторая пара постоянных магнитов 2-24 размещена рядом со второй катушкой фокусировки 2-20.
Как показано на фиг.27, держатель 2-14 линзы содержит в целом прямоугольную обойму 2-30 с круговой апертурой 2-23 в середине. Линза объектива 2-12 приклеена наверху круговой апертуры 2-32 в обойме 2-30. Обойма 2-30 поддерживается I-образной платформой 2-34, имеющей пару канавок 2-44, образованных на ее краях, для размещения и закрепления катушки трекинга 2-16 при ее намотке вокруг платформы. Основание 2-36, поддерживающее платформу 2-34, включает первую и вторую Т-образные секции 2-46 и 2-48 со щелью 2-50 между ними. Как будет пояснено ниже, это основание 2-36 действует как баланс масс для держателя 2-14 линзы. Обойма 2-30, платформа 2-34 и основание 2-36 съюстированы с двух сторон с образованием первой и второй противолежащих торцов 2-52 и 2-54 держателя линзы.
Катушки фокусировки 2-18 и 2-20 прикреплены к катушке трекинга 2-16, так что центральные оси катушек фокусировки совпадают, пересекаются и предпочтительно перпендикулярны центральной оси катушки трекинга. Катушки фокусировки 2-18 и 2-20 предпочтительно образованы из термически связанного провода со слоем связующего материала на нем и предпочтительно намотаны на соответствующий держатель или оправку. Катушки 2-18 и 2-20 предпочтительно намотаны с максимально возможной плотностью без деформирования провода. Специалистам в данной области техники должно быть ясно, что такая плотность будет зависеть от типа провода. В процессе намотки катушки фокусировки 2-18 и 2-20 предпочтительно нагреваются для расплавления слоя материала связующего для увеличения твердости и жесткости намотанных катушек. Температура выбирается так, чтобы она была достаточно высокой для расплавления материала связующего, но не такой высокой, чтобы вызвать расплавление изоляции. После охлаждения катушки 2-18 и 2-20 снимают с держателя и эти свободно стоящие катушки затем прикрепляются к катушке трекинга хорошо известным способом с использованием соответствующего адгезива.
Каждая из свободно стоящих катушек фокусировки 2-18 и 2-20 имеет овальную форму и две продольные стороны 2-56, соединенные парой более коротких торцов 2-58. Стороны 2-56 и торцы 2-58 катушек 2-18 и 2-20 окружают открытую или полую центральную область 2-60. Катушка трекинга 2-16 намотана на I-образную платформу 2-34 держателя 2-14 линзы так, что катушка размещается и закрепляется внутри канавок 2-44 и позиционируется против противоположных торцов 2-52 и 2-54 держателя линзы. Как показано на фиг.26 и 27, две катушки фокусировки 2-18 и 2-20 прикреплены к катушке трекинга 2-16 так, что катушка трекинга размещена в центре 2-60 каждой катушки фокусировки. Катушки фокусировки 2-18 и 2-20 кроме того позиционированы так, что каждая катушка прилегает к противоположным торцам 2-52 и 2-54 держателя 2-14 линзы. Таким образом, катушка трекинга 2-16 и катушки фокусировки 2-18 и 2-20 жестко закреплены на держателе 2-14 линзы, тем самым образуя более жесткий блок со свойствами единой сплошной массы.
Как показано на фиг.28, 29, 30, 31, источник света (не показан), в типовом случае лазерный диод, излучает лазерный луч 2-70 (фиг.31). Луч 2-70 падает на призму 2-72, которая ортогонально отражает световой пучок вверх к линзе объектива 2-12. Линза 2-12 фокусирует пучок 2-70 в точно определенную фокусную точку или оптическое пятно 2-74 на поверхности носителя, например оптического диска 2-76. После падения на диск 2-76 световой пучок 2-70 изменяется за счет информации, записанной на диске 2-76, и отражается в виде расходящегося светового пучка, несущего информацию, идентичную закодированной на диске 2-76. Этот отраженный пучок повторно входит в линзу объектива 2-12, где он коллимируется и вновь отражается призмой 2-72 к фотодетектору (не показан), который детектирует данные, записанные на диске 2-76. Кроме того, если световой пучок, падающий на фотодетектор, расфокусирован или несъюстирован, то величина разъюстировки или расфокусировки измеряется электронными средствами и используется в качестве обратной связи для следящей
системы (не показана), хорошо известной из уровня техники, обеспечивающей повторную надлежащую юстировку линзы объектива 2-12 относительно диска 2-76.
Именно эти сигналы обратной связи, определяющие величину и направление перемещения исполнительного механизма 2-10 и линзы объектива 2-12 на нем, необходимы для наведения светового пучка в требуемое положение фокуса относительно диска 2-76. Если необходимо радиальное перемещение (трекинг) для размещения линзы объектива 2-12 рядом с центром выбранной дорожки 2-76, то к катушке трекинга 2-16 прикладывается ток. Этот ток взаимодействует с магнитным полем, формируемым парами постоянных магнитов 2-22 и 2-24, для формирования сил, перемещающих исполнительный механизм 2-10 в направлении трекинга. Эти силы генерируются согласно закону Лоренца F=B.X.I.l, где F - сила, действующая на катушку трекинга 2-16, В - плотность магнитного потока магнитного поля между парами постоянных магнитов 2-22 и 2-24, I - ток, протекающий через катушку трекинга 2-16, и l - длина катушки 2-16. Если ток I, приложенный к катушке трекинга 2-16, протекает через нее в направлении против часовой стрелки, относительно ориентации по фиг.29, то формируется сила, перемещающая исполнительный механизм 2-10 вправо. Это перемещение вправо показано на фиг.31 стрелкой 2-15. Если ток, приложенный к катушке 2-16, протекает через нее в противоположном направлении, по часовой стрелке, то формируется сила, перемещающая исполнительный механизм 2-10 влево, как показано на фиг. 31 стрелкой 2-17. Таким образом, исполнительный механизм 2-10 перемещается радиально для позиционирования линзы объектива 2-12 рядом с центром требуемой информационной дорожки на поверхности оптического диска 2-76.
Перемещение исполнительного механизма 2-10 для осуществления фокусировки производится, когда ток генерируется в двух катушках фокусировки 2-18 и 2-20, прикрепленных к катушке трекинга 2-16 по сторонам держателя линзы 2-14. Когда ток в этих катушках 2-18 и 2-20 протекает в направлении против часовой стрелки в плоскости фиг.30, то формируется сила, которая перемещает держатель линзы 2-14 и линзу объектива 2-12 вверх, как показано стрелкой 2-19 на фиг. 31, к поверхности оптического диска 2-76. И наоборот, если приложенный ток протекает через катушки 2-18 и 2-20 в направлении по часовой стрелке в плоскости фиг. 30, то формируется сила, перемещающая держатель линзы 2-14 вниз, как показано на фиг.31 стрелкой 2-21, или - от поверхности диска 2-76.
Поскольку катушка трекинга 2-16 связана с держателем линзы 2-14 и в свою очередь катушки фокусировки 2-18 и 2-20 связаны непосредственно с катушкой трекинга 2-16, катушки и держатель линзы действуют как "сплошная масса", и частоты, на которых катушки развязаны относительно держателя линзы, существенно повышаются. В примере выполнения исполнительного механизма в соответствии с настоящим изобретением измеренные частоты развязки составили до 30 кГц.
В соответствии с фиг.28 и 29, пары магнитов 2-22 и 2-24 остаются стационарными при перемещении держателя линзы 2-24 и закреплены в прямоугольном корпусе или основании 2-80. Две пары проводов подвески 2-82 и 2-84 обеспечивают подвеску держателя линзы объектива 2-14 между парами магнитов 2-22 и 2-24. Пары проводов 2-82 и 2-84 прикреплены к стационарной плате печатной схемы 2-85, которая установлена вертикально относительно держателя линзы 2-14 и действует в качестве опоры для пар проводов 2-82 и 2-84. Пары проводов 2-82 и 2-84, кроме того, прикреплены к электрическим контактам на подвижной схемной плате 2-87, которая прикреплена к держателю линзы 2-14 в вертикальной ориентации. В частности свободный конец каждой катушки фокусировки 2-18 и 2-20 припаян к электрическим контактам 2-86, так что ток подается в катушки фокусировки 2-16 и 2-18 через вторую или нижнюю пару проводов 2-84, припаянных к контактам 2-86. Другой свободный конец каждой катушки фокусировки 2-18 и 2-20 припаян к схемной плате 2-87 и соединен вдоль электрического контакта 2-88. Свободные концы катушки трекинга 2-16 и первая или верхняя пара проводов подвески 2-82 припаяны к электрическим контактам 2-89 подвижной схемной платы 2-87, так что ток подается в катушку через верхнюю пару проводов. Основание 2-36 держателя линзы 2-14 действует как баланс масс, уравновешивая вес линзы объектива 2-12 и схемной платы 2-87, к которой прикреплен держатель линзы 2-14.
Как вариант, четыре изгибных элемента могут быть использованы для подвески держателя линзы 2-14. Изгибные элементы будут действовать как параллельные пластинчатые пружины, которые позволяют держателю линзы объектива 2-14 перемещаться вверх и вниз для фокусировки и запрещают изменять ориентацию оптической оси линзы 2-12. Таким образом линза объектива 2-12 не будет поворачиваться относительно поверхности оптического диска 2-76 при перемещении держателя линзы 2-14 в направлении фокусировки. Каждый изгибный элемент, кроме того, содержит узкую часть, которая действует как шарнир, позволяя в некоторой степени совершать перемещения держателя линзы 2-14 в боковом направлении для регулировки трекинга.
Дополнительно к осуществлению перемещений для точной фокусировки и трекинга держателя линзы 2-14, часто желательно определять положение держателя линзы 2-14 относительно основания 2-80. Для определения положения линзы объектива 2-12 в направлениях и/или фокусировки исполнительный механизм 2-10 снабжен датчиком положения 2-90. Предпочтительно светоизлучающий диод 2-92 размещен на одной стороне исполнительного механизма 2-10, противоположно датчику 2-90, так что при центрировании держателя линзы объектива 2-14 в пределах основания 2-90 свет, излученный светодиодом 2-92, будет проходить через щель 2-50 в держателе линзы 2-14 и облучать часть датчика 2-90. В качестве датчика 2-90 предпочтительно используется позиционно-чувствительный детектор, причем датчик размещен так, что когда держатель линзы 2-14 находится в центре основания 2-90, свет от светодиода 2-92 будет проходить через щель 2-50 и распределяться на детекторе. Таким образом, когда держатель линзы 2-14 перемещается в боковом направлении, т.е. в направлении трекинга, то будут облучаться различные части датчика 2-90, индицируя положение держателя линзы 2-14 в направлении трекинга. Следовательно, если держатель линзы 2-14 смещен от центра основания 2-80, то часть света, излученного светодиодом 2-92, будет блокироваться держателем линзы 2-14, обуславливая неравномерное распределение света на датчики 2-90. Это неравномерное распределение может быть затем проанализировано для определения положения держателя линзы 2-14 относительно основания 2-80 с использованием хорошо известных схем и способов.
Когда в следящей системе формируется управляющий сигнал, определенный ток прикладывается к катушке трекинга 2-16 и/или к катушкам фокусировки 2-18 и 2-20 в зависимости от направления, в котором необходимо сместить держатель линзы 2-14 с прикрепленной к нему линзой объектива 2-12. Такие следящие системы и схемы обратной связи, контролирующие величину тока, хорошо известны в технике. Как указывалось выше, этот ток взаимодействует с электромагнитным полем, формируемым парами постоянных магнитов 2-22 и 2-24, для создания силы, которая смещает держатель линзы 2-14 с прикрепленной к нему линзой объектива 2-12 в соответствующем направлении фокусировки или трекинга.
Конструкция и способ работы механизма фокусировки и трекинга будут детально описаны ниже. Как показано на фиг.32 и 33, пары постоянных магнитов 2-22 и 2-24 ориентированы противоположными полюсами противоположно друг другу. Более конкретно первая пара магнитов 2-22 содержит первый или верхний магнит 2-100 и второй или нижний магнит 2-102 в стопке, соединенные вдоль плоской поверхности, так что северный полюс верхнего магнита 2-100 и южный полюс нижнего магнита 2-102 (фиг.33) расположены рядом с держателем линзы 2-14. Вторая пара магнитов 2-24 содержит третий или верхний магнит 2-104 и четвертый или нижний магнит 2-106 в стопке, соединенные вдоль плоской поверхности с противоположной ориентацией, так что южный полюс верхнего магнита 2-104 и северный полюс нижнего магнита 2-106 (фиг.33) расположены рядом с держателем линзы 2-14. Как показано на фиг.32, силовые линии, соответствующие этой ориентации, выходят из северного полюса каждой пары магнитов 2-22 и 2-24 и входят в их южный полюс. Железные пластины 2-110 (показаны пунктиром) могут быть прикреплены к каждой паре магнитов 2-22 и 2-24 на сторонах, противоположных держателю линзы 2-14. Железные пластины 2-110 эффективно шунтируют магнитный поток, выходящий из сторон магнитов 2-100, 2-102, 2-104, 2-106, противоположных держателю линзы 2-14, тем самым увеличивая магнитный поток рядом с держателем линзы и соответственно увеличивая мощность исполнительного механизма.
Силы фокусировки, действующие на исполнительный механизм 2-10, более детально показаны на фиг.34. Когда ток I приложен к катушкам фокусировки 2-18 и 2-20 в показанном направлении, т.е. от плоскости чертежа рядом с верхними магнитами 2-100 и 2-104 и в плоскость чертежа рядом с нижними магнитами 2-102 и 2-106, то формируются силы Ffocus1 и Ffocus2, которые передаются к держателю линзы 2-14 для ускорения или торможения подвижной массы (держателя линзы) и к парам проводов подвески 2-82 и 2-84, изгибая провода подвески для перемещения держателя линзы 2-14 вместе с линзой объектива 2-12 ближе к оптическому диску 2-76. Так как линии магнитного потока изгибаются, как описано выше, то направление магнитного поля в катушках 2-18 и 2-20 изменяется по вертикали. Например, для катушки фокусировки 2-18, размещенной рядом с первой парой магнитов 2-22, в плоскости фиг.34, вертикально секущей катушку рядом с верхним магнитом 2-100, магнитное поле имеет первое направление наверху катушки 2-18, определяемое В1, и второе направление в секущей плоскости рядом с нижним магнитом 2-102 внизу катушки 2-18, определяемое В2. Согласно закону Лоренца, F=B.X.I.l, ток взаимодействует с магнитным полем В1 для формирования первой составляющей силы F1, действующей на часть катушки фокусировки 2-18 рядом с верхним магнитом 2-100, и взаимодействует с магнитным полем В2 для формирования второй составляющей силы F2, действующей на часть катушки фокусировки рядом с нижним магнитом 2-102. Так как величины горизонтальных частей составляющих силы F1 и F2 равны и противоположны по направлению, эти горизонтальные составляющие силы компенсируют друг друга в соответствии с правилами векторного сложения для формирования результирующей силы Ffocus1, которая направлена вертикально вверх в плоскости фиг.34. Аналогично, горизонтальные составляющие силы для остальной части катушки 2-18 также компенсируются, давая вертикальную результирующую силу, которая направлена строго вертикально вверх (т.е. не имеет горизонтальной составляющей) и поэтому перемещает держатель линзы 2-14 ближе к поверхности оптического диска 2-76.
Так как линии потока, генерируемого второй парой магнитов 2-24, искривляются противоположно тем, которые генерируются первой парой магнитов 2-22, направление магнитного поля в любой точке в катушке фокусировки 2-20 отличается от направления поля в соответствующей точке в катушке фокусировки 2-18. И вновь, вследствие кривизны линий потока, направление поля, действующего на катушку 2-20, изменяется по вертикали вдоль катушки. В плоскости фиг. 34, которая вертикально пересекает катушку рядом с верхним магнитом 2-104 второй пары магнитов 2-24, направление магнитного поля определяется В3 наверху катушки 2-20 и генерируется сила в соответствии с законом Лоренца в направлении F3, в то время как в секущей плоскости рядом с нижним магнитом 2-106 направление магнитного поля определяется В4 внизу катушки 2-20 и генерируется сила F4. Силы складываются и формируют результирующую силу Ffocus2, которая, как показано, направлена строго вертикально вверх.
Таким образом, можно видеть, что силы Ffocus1 и Ffocus2 действуют на катушки фокусировки 2-18 и 2-20 соответственно для перемещения держателя линзы 2-14 вверх. И наоборот, если ток к катушке фокусировки 2-18, 2-20 приложен в противоположном направлении, то будут формироваться силы, перемещающие держатель линзы 2-14 вниз или от поверхности оптического диска 2-76. Перемещая линзу объектива 2-12 ближе или дальше от поверхности оптического диска 2-76, катушки фокусировки 2-18 и 2-20 обеспечивают точную фокусировку лазерного пучка, выходящего из линзы объектива 2-12, на поверхности диска 2-76.
Как показано на фиг.35, перемещение исполнительного механизма 2-10 для достижения точного трекинга производится, когда генерируется ток в катушке трекинга 2-16, прикрепленной к держателю линзы 2-14. В плоскости фиг.35, которая горизонтально пересекает катушку трекинга 2-16, магнитное поле с направлением В1 действует на поперечное сечение катушки 2-16, ближайшей к первой паре магнитов 2-22, а магнитное поле, имеющее направление В2, действует на поперечное сечение катушки, расположенной рядом с второй парой магнитов 2-24. Если, например, ток I приложен в направлении против часовой стрелки к катушке трекинга 2-16, сила F1 действует на часть катушки рядом с первой парой магнитов 2-22, а сила F2 действует на часть катушки трекинга рядом с второй парой магнитов 2-24. Эти силы складываются по законам векторного сложения для формирования результирующей силы Ftrack, которая действует, перемещая держатель линзы 2-14 вправо в плоскости фиг.35. Когда силы действуют на катушку трекинга 2-16 таким образом, они передаются через держатель линзы 2-14, обеспечивая ускорение или торможение движущейся массы (держателя линзы), и прикладываются к парам проводов подвески 2-82 и 2-84, которые изгибаются в соответствующем направлении для перемещения линзы объектива 2-12 и совмещают центр выходящего из нее лазерного пучка с центром выбранной дорожки с записью данных на поверхности оптического диска 2-76. И наоборот, если приложен ток I, протекающий в катушке 2-16 в направлении по часовой стрелке, то формируется результирующая сила, которая перемещает держатель линзы 2-14 влево в плоскости фиг.35.
Таким образом, можно видеть, что рассмотренное устройство связи согласно изобретению позволяет уменьшить расстояние между результирующими силами, действующими на катушки 2-16, 2-18, 2-20, и оптической осью линзы объектива 2-12, и, следовательно, уменьшить отрицательно действующие режимы перемещения, такие как тангаж, крен, рыскание, в процессе проведения операций фокусировки и трекинга.
В конструкции исполнительного механизма, соответствующего изобретению, требуются только две пары постоянных магнитов, т.е. всего четыре магнита и три катушки для осуществления перемещений в направлениях трекинга и фокусировки, тем самым уменьшаются размеры и вес исполнительного механизма и повышаются частоты развязки. Ввиду малого числа компонентов исполнительного механизма, упрощается его изготовление и сборка в сравнении с известными конструкциями исполнительных механизмов, имеющих большее число катушек, магнитов и полюсных наконечников. Кроме того, так как катушки трекинга и фокусировки 2-16, 2-18, 2-20 связаны непосредственно с держателем линзы 2-14 и не намотаны на ярмо или полюса, существенно улучшаются жесткость и резонансный частотный отклик. Кроме того, непосредственная связь катушек 2-16, 2-18, 2-20 сокращает расстояние между точкой, где генерируются эффективно действующие силы фокусировки и трекинга, и оптической осью линзы объектива, и тем самым, уменьшаются отрицательно действующие перемещения, такие как тангаж, крен и рыскание.
Настоящее изобретение позволяет улучшить эффективность электродвигателя. Для исполнительных механизмов, сконструированных в соответствии с изобретением, получены значения эксплуатационных характеристик 130 м/c2/кв.кор. (W) для направления фокусировки и 70 м/c2/кв.кор. (W) для радиального направления. Эти значения существенно выше, чем достигнутые в ранее известных конструкциях. Специалистам в данной области техники должно быть ясно, что настоящее изобретение обеспечивает использование примерно 40% катушки, что позволяет увеличить эффективность исполнительного механизма по сравнению с известными конструкциями.
Предпочтительный вариант выполнения изобретения был описан со ссылками на систему координат, показанную на фиг.26, в которой оптический диск 2-76 расположен над линзой объектива 2-12, так что фокусировка осуществляется при перемещении исполнительного механизма 2-10 вверх и вниз вдоль оси Z, а трекинг осуществляется при перемещении исполнительного механизма в боковых направлениях вдоль оси Y. Специалистам в данной области техники должно быть ясно, что исполнительный механизм, выполненный в соответствии с изобретением, может быть также введен в оптические системы, имеющие ориентации, отличающиеся от рассмотренных выше.
Устройство восприятия фокусировки
На фиг.36 представлено схематичное представление предпочтительного варианта устройства восприятия фокусировки 3-10, соответствующего изобретению. Устройство 3-10 содержит оптическую систему 3-12 для формирования следящего луча S, индицирующего фокусировку облучающего луча I на оптическом диске 3-14. Следящий луч S содержит часть облучающего луча I, отраженного диском 3-14. Способы формирования такого следящего луча хорошо известны специалистам в данной области техники. Например, оптическая система, подобная системе 3-12, для формирования следящего луча S описана в патенте США N 4862442, приведенном здесь для ссылки. Краткое изложение принципа работы оптической системы 3-12 приведено ниже.
Как показано на фиг.36, оптическая система 3-12 содержит лазерный источник 3-16, формирующий линейно поляризованный пучок В. Пучок В коллимируется коллимирующей линзой 3-18, и коллимированный пучок направляется оптическим лучерасщепителем 3-20 на линзу объектива 3-24. Коллимированный луч затем направляется линзой объектива 3-24 на поверхность оптического диска 3-14. Оптический диск может, например, представлять собой компакт-диск, видеодиск, ЗУ на оптическом диске. Диск 3-14 отражает облучающий пучок, сфокусированный на нем, назад через линзу объектива 3-24 к блоку расщепления луча 3-20. Специалистам в данной области техники должно быть ясно, что блок расщепления луча 3-20 может содержать первый расщепитель луча (не показан) для изменения направления первой части отраженного облучающего пучка для формирования следящего пучка S. Блок расщепления луча 3-20 может также содержать второй расщепитель луча (не показан) для изменения направления второй части отраженного облучающего пучка для формирования информационного пучка. Такой информационный пучок несет информацию, содержащуюся на оптическом диске 3-14. Следящий пучок S перехватывается FTR-призмой 3-30, конструкция которой подробно рассмотрена ниже.
Как более подробно рассмотрено ниже, следящий пучок S делится FTR-призмой 3-30 на переданный пучок Т и отраженный пучок R. В устройстве по фиг.36 переданный и отраженный пучки Т и R имеют по существу равные поперечные сечения и интенсивности. Переданный пучок Т падает на первый квадратурный детектор 3-32, а отраженный пучок R - на второй квадратурный детектор 3-34. Электрические сигналы, формируемые квадратурными детекторами 3-32 и 3-34 в ответ на распределения интенсивности переданного и отраженного пучков Т и R, используются блоком управления 3-37 для формирования дифференциального сигнала ошибки фокусировки, индицирующего фокусировку облучающего пучка I на диске 3-14. Предпочтительный пример выполнения блока управления 3-37 и использованного в нем способа формирования дифференциального сигнала ошибки фокусировки рассмотрен ниже. Сигнал ошибки фокусировки может, например, использоваться для управления механическим устройством (не показан), предназначенным для управления фокусировкой облучающего пучка I за счет изменения смещения линзы объектива 3-24 относительно диска 3-14.
На фиг. 3-37 показан увеличенный вид в поперечном сечении сверху FTR-призмы 3-30. Призма 3-30 содержит первый и второй оптические элементы 3-35 и 3-36, между которым находится разделяющий слой 3-38. Оптические элементы 3-35 и 3-36 могут быть выполнены из стекла с показателем преломления, превышающим показатель преломления разделяющего слоя 3-38. Например, в предпочтительном примере осуществления оптические элементы 3-35 и 3-36 могут быть изготовлены из стекла с показателем преломления 1,55, а разделяющий слой 3-38 может быть выполнен твердым, например из фторида магния (MgF2) или из кварцевого стекла (SiO2), с показателем преломления 1,38 и 1,48 соответственно. Разделяющий слой 3-38 не обязательно должен быть твердым; он может быть образован жидкостью или воздухом, при условии, что оптические элементы 3-35 и 3-36 имеют более высокий коэффициент преломления.
Физика взаимодействия пучка света S со слоем 3-38 состоит в следующем. Если слой 3-38 и оптический элемент 3-35 отсутствуют, то имеет место хорошо известное явление полного внутреннего отражения на грани гипотенузы оптического элемента 3-36, обеспечивающее передачу всего пучка S в направлении пучка R. Однако некоторое количество световой энергии существует за гранью гипотенузы оптического элемента 3-36 в форме "не распространяющихся волн". Когда элемент 3-35 приводится в контакт с оптическим элементом 3-36, эта энергия ответвляется без потерь в элемент 3-35 и распространяется в направлении пучка Т. Это явление известно как "нарушенное полное отражение" (FTR). В этих условиях, если FTR-призма расположена относительно пучка S так, что угол падения А пучка S на разделяющий слой 3-38 близок к области нарушенного полного отражения, то кривые передачи и отражения будут иметь очень большую крутизну (угловую чувствительность). Это позволяет изготавливать высокочувствительные системы восприятия фокусировки. Кроме того, кривые передачи и отражения для такой системы, основанной на принципе нарушенного полного отражения, будут относительно нечувствительными к длине волны света в пучке S, по сравнению с соответствующими характеристиками многослойной структуры.
Призма 3-30 может быть изготовлена путем нанесения разделяющего слоя на любой из оптических элементов обычными методами тонкопленочной технологии. Дополняющий оптический элемент затем прикрепляется к свободной поверхности разделяющего слоя с помощью оптического клея. Хотя показатели преломления первого и второго оптических элементов 3-35 и 3-36 обычно выбираются идентичными, однако также могут быть выбраны и различные показатели преломления. В предпочтительном примере осуществления первый и второй оптические элементы имеют идентичные показатели преломления при такой геометрии, что переданный и отраженный пучки Т и R имеют существенно равные поперечные сечения.
Как показано на виде спереди на фиг.38, первый квадратурный детектор 3-32 включает первый, второй, третий и четвертый фоточувствительные элементы 3-40, 3-42, 3-44 и 3-46 соответственно, которые формируют электрические сигналы Т1, Т2, Т3 и Т4 в соответствии с интенсивностью переданного пучка Т, падающего на них. Аналогично, второй квадратурный детектор 3-35 содержит пятый, шестой, седьмой и восьмой фоточувствительные элементы 3-50, 3-52, 3-54 и 3-56 соответственно, которые формируют электрические сигналы R1, R2, R3 и R4 в ответ на падающий отраженный луч R. Фоточувствительные элементы могут представлять собой pin-диоды, причем уровень электрического выходного сигнала каждого диода пропорционален принятой оптической энергии.
Если линза объектива 3-24 по фиг.36 расположена относительно диска 3-14 так, что облучающий пучок I надлежащим образом сфокусирован, то лучи, входящие в следящий пучок S, хорошо коллимированы (т.е. по существу параллельны) и поэтому падают на разделяющий слой 3-38 по существу под одинаковым углом А, как показано на фиг.37. В противоположность этому, если линза объектива 3-24 не фокусирует облучающий пучок I в плоскости расположения диска 3-14, то лучи в пучке S будут либо сходящимися, либо расходящимися. Поэтому все лучи в пучке S будут падать на разделяющий слой 3-38 под одним и тем же углом, если облучающий пучок хорошо сфокусирован, в то время как лучи с разными углами падения соответствуют случаю расфокусировки пучка I. Призма 3-30 сконструирована таким образом, что характеристики отражения и пропускания разделяющего слоя 3-38 весьма чувствительны к углу падения оптической энергии на слой 3-38. Таким образом, пространственное распределение интенсивности переданного и отраженного пучков Т и R будет изменяться с изменением фокусировки облучающего пучка I относительно поверхности диска 3-14. Т.е. хорошо сфокусированный пучок I дает хорошо коллимированный следящий пучок S, так что все его лучи испытывают одно и то же отражение разделяющим слоем 3-38. Соответственно, переданный и отраженный пучки Т и R будут иметь существенно равномерную интенсивность при хорошей фокусировке пучка I. И наоборот, расходящийся или сходящийся следящий пучок S сформирует переданный и отраженный пучки Т и R с неравномерным распределением интенсивности, поскольку лучи в следящем пучке S будут испытывать различную степень отражения разделяющим слоем 3-38. Путем детектирования этих пространственных изменений интенсивности переданного и отраженного пучков фотодетекторы 3-32 и 3-34 формируют электрические сигналы, которые могут быть использованы для формирования дифференциального сигнала ошибки фокусировки, индицирующего положение фокуса облучающего пучка I.
Способ формирования дифференциального сигнала ошибки фокусировки с учетом степени коллимирования следящего пучка S может быть пояснен с помощью фиг.39. На фиг.39 представлен график отражательной способности (интенсивность пучка R - интенсивность пучка S) FTR-призмы 3-30 в функции угла падения лучей в следящем пучке S относительно разделяющего слоя 3-38. Более конкретно, график на фиг.39 представляет отражательные способности Rs, Rp призмы 3-30 в ответ на облучение s-поляризованной и р-поляризованной оптической энергией с длиной волны 0,78 мкм. Профили отражательной способности по фиг. 39 соответствуют FTR-призме 3-30, имеющей разделяющий слой 3-38 с толщиной 4,5 мкм и коэффициент преломления 1,38, причем разделяющий слой находится между стеклянными элементами с коэффициентом преломления 1,55. Как показано на фиг.39, призма 3-30 предпочтительно размещена относительно следящего пучка S под углом падения А с соответствующей рабочей точкой Р. Т.е. в рабочей точке Р призма 3-30 позиционирована так, что облучающий пучок I, надлежащим образом сфокусированный на диске 3-14, формирует хорошо коллимированный следящий пучок S, лучи в котором падают на разделяющий слой 3-38 под углом А1. Поскольку отражательная способность призмы 3-30 в рабочей точке Р примерно равна 0,5, то переданный и отраженный пучки, формируемые оптическим устройством 3-12, включающим призму 3-30, имеют по существу идентичную среднюю интенсивность.
Если расстояние между линзой объектива 3-24 и диском 3-14 изменяется так, что следящий пучок становится либо сходящимся, либо расходящимся, первая часть его будет падать на разделяющий слой 3-38 под углом падения, большим А1. Например, под углом А2 (фиг.39) соответствующая часть следящего пучка будет испытывать отражения с коэффициентом примерно 0,7. Поскольку первая часть следящего пучка испытывала отражения с коэффициентом 0,5 при хорошо коллимированном следящем пучке S, то области фотодетекторов 3-32 и 3-34, воспринимающие части отраженного и переданного пучков R и Т, полученные из первой части следящего пучка, получат соответственно больше или меньше оптической энергии, чем при надлежащей фокусировке облучающего пучка I. Аналогично, области фотодетекторов 3-32 и 3-34, оптически сопряженные с частями переданного и отраженного пучков Т и R для второй части следящего пучка S, падающей на разделяющий слой 3-38 под углом падения A3, меньшим угла А1, получат соответственно большие и меньшие количества оптической энергии, чем в условии хорошей фокусировки. В ответ на электрические сигналы, сформированные фотодетекторами 3-32 и 3-34, формируется дифференциальный сигнал ошибки фокусировки, характеризующий собой пространственную неравномерность распределения интенсивности переданного и отраженного пучков Т и R. Более того, поскольку в предпочтительном варианте выполнения призма 3-30 является оптически непоглощающей, изменения интенсивности переданного пучка Т, обусловленные изменением угла падения части следящего пучка S, являются зеркальными отражениями равных им и противоположно направленных изменений величины части отраженного пучка R, сформированного той же частью следящего пучка. Недифференциальные сигналы ошибки фокусировки могут быть получены независимо с помощью переданного или отраженного пучков соответственно, с использованием уравнений
Сигнал ошибки фокусировки (перед.)=(Т1+Т2)-(Т3+Т4) (1)
Сигнал ошибки фокусировки (отраж.)=(R1+R2)-(R3+R4) (2)
В дифференциальной системе дифференциальный сигнал ошибки фокусировки (DFES) формируется блоком управления 3-37 в соответствии со следующим уравнением:
DFES=(R1+R2+T3+T4)-(T1+T2+R3+R4) (3)
Блок управления 3-37 содержит схемы, обеспечивающие выполнение арифметических операций согласно уравнению (3) для формирования дифференциального сигнала ошибки фокусировки (DFES) в соответствии с этими операциями. Предварительные усилители (не показаны) обеспечивают усиление электрических сигналов с фотодетекторов 3-32 и 3-34 до их обработки блоком управления 3-37.
Использование устройства с двумя квадратурными детекторами, описанного здесь, позволяет синтезировать дифференциальные сигналы ошибки фокусировки, характеризуемые меньшей чувствительностью к некоторым недостаткам пучка, не обусловленным неточностями положения фокуса облучающего пучка относительно диска 3-14. Поскольку локализованное уменьшение интенсивности следящего пучка S, не связанное с позиционированием фокуса облучающего пучка, воздействует на фотодетекторы 3-32 и 3-34 в одинаковой степени, такое уменьшение не влияет на величину дифференциального сигнала ошибки фокусировки, вследствие соответствующей компенсации, согласно уравнению (3).
Как указывалось выше в разделе "Предпосылки изобретения", известные системы фокусировки были недостаточно эффективны для реализации дифференциальной схемы восприятия фокусировки, описываемой уравнением (3). В частности, особенность настоящего изобретения заключается в том, что FTR-призма 3-30 обеспечивает формирование переданного и отраженного пучков по существу одинакового поперечного сечения и интенсивности, так что они могут эффективно способствовать формированию дифференциального сигнала ошибки фокусировки.
Кроме того, для формирования дифференциального сигнала ошибки фокусировки в целях поддержания фокуса облучающего пучка I в направлении, нормальном к поверхности диска 3-14, электрические выходные сигналы фотодетекторов 3-32 и 3-34 могут также использоваться блоком управления 3-37 для генерирования сигнала ошибки трекинга (TES). Этот сигнал индицирует радиальное положение облучающего пучка I относительно обычно используемых спиральных или концентрических дорожек записи (не показано) на поверхности диска 3-14. Сигнал ошибки трекинга позволит пучку I отслеживать конкретные дорожки, несмотря на эксцентриситеты за счет управления механическим устройством (не показано), обеспечивающим регулировку радиального положения линзы объектива 3-24 относительно диска 3-14. Сигнал ошибки трекинга вычисляется блоком управления 3-37 на основе электрических выходных сигналов фотодетекторов 3-32 и 3-34 в соответствии со следующим уравнением:
TES=(T1+T3+R3+R1)-(T2+T4+R2+R4) (4)
И вновь, способ определения сигнала ошибки трекинга на основе соотношения между пространственными изменениями интенсивности следящего пучка и соответствующего позиционирования облучающего пучка раскрыт, например, в патенте США N 4707648.
Вероятно, в большинстве систем, обеспечивающих управление фокусировкой облучающего пучка относительно оптического диска, желательно формировать как сигналы ошибки трекинга, так и сигналы ошибки фокусировки в ответ на электрические выходные сигналы с элементов фотодетектирования. Поскольку формирование сигналов ошибки трекинга и фокусировки, как известно, требует использования, по меньшей мере, одного квадратурного детектора, варианты осуществления настоящего изобретения будут описываться со ссылками на использование квадратурных детекторов. Также известно, что сигнал ошибки фокусировки может быть получен на основе электрических сигналов, формируемых фотодетекторами, имеющими только две независимые фоточувствительные области (двухэлементные детекторы). Соответственно, в системах, требующих генерирования только сигнала ошибки фокусировки, может быть использован одиночный фотодетектирующий элемент, вместо первого и второго элементов 3-40 и 3-42 фотодетектора 3-32, и одиночный фотодетектирующий элемент может соответственно заменять третий и четвертый элементы 3-44 и 3-46. Аналогично, одиночный фотодетектирующий элемент может быть использован вместо пятого и шестого элементов 3-50 и 3-52 фотодетектора 3-34 и одиночный элемент может быть использован вместо седьмого и восьмого элементов 3-54 и 3-56.
Крутизна профиля отражательной способности по фиг.39 в рабочей точке Р пропорциональна чувствительности дифференциального сигнала ошибки фокусировки, формируемого устройством 3-10. Более конкретно, чувствительность устройства 3-10 к изменениям фокусировки облучающего пучка I увеличивается при увеличении крутизны указанного профиля отражательной способности. Соответственно, задачей изобретения является создание призмы 3-30, характеризуемой профилем отражательной способности с максимально возможной крутизной.
Форма кривой отражательной способности по фиг.39 в рабочей точке Р может быть изменена за счет изменения толщины разделяющего слоя 3-38. Например, увеличение толщины разделяющего слоя 3-38 переводит угол минимальной отражательной способности Am к критическому углу Ас (фиг.39), не влияя на значение последнего. Следовательно, увеличение толщины разделяющего слоя служит повышению крутизны кривой отражательной способности вблизи рабочей точки Р. Аналогично, снижение толщины разделяющего слоя 3-38 увеличивает угловое разнесение между критическим углом Ас и углом минимальной отражающей способности Am. Форма кривой отражательной способности призмы 3-30 может изменяться для регулировки чувствительности дифференциального сигнала ошибки фокусировки. Приемлемая форма может быть получена, например, при использовании разделяющего слоя с толщиной больше половины длины волны облучающего пучка I.
Значение критического угла Ас может изменяться за счет изменения коэффициента преломления разделяющего слоя 3-38 относительно коэффициента преломления стеклянных элементов 3-35 и 3-36. Таким образом, регулировка толщины во взаимодействии с манипулированием коэффициентами преломления разделяющего слоя и окружающих стеклянных элементов позволяет изготовлять призму 3-30 в соответствии с требуемым профилем отражательной способности.
На фиг. 40 представлен график значения нормированного дифференциального сигнала ошибки фокусировки (NDFES), формируемого в устройстве 3-10 в функции отклонения от требуемого смещения линзы объектива 3-24 относительно диска 3-14.
Данные на фиг. 40 были получены с использованием призмы 3-30, имеющей разделительный слой с коэффициентом преломления 1,38 и толщину 4,5 мкм между двумя стеклянными элементами с коэффициентом преломления 1,55, причем призма 3-30 облучалась следящим лучом с длиной волны 0,78 мкм. Как показано на фиг. 40, значение дифференциального сигнала ошибки фокусировки предпочтительно равно нулю, когда имеет место требуемое смещение линзы объектива 3-24 относительно диска 3-14. Знак (+ или -) дифференциального сигнала ошибки фокусировки, таким образом, индицирует, что смещение между линзой объектива и поверхностью диска превышает или меньше того, что требуется для надлежащей фокусировки. Как указано выше, дифференциальный сигнал ошибки фокусировки может использоваться для управления механическим устройством (не показано), предназначенным для регулировки расстояния между линзой объектива 3-24 и диском 3-14. Можно видеть, что крутизна нормированного дифференциального сигнала ошибки фокусировки примерно равна 0,16/мкм в рабочей точке, определяемой нулевым смещением диска.
Хотя следящий пучок S представлен здесь как по существу коллимированный при падении на разделительный слой 3-38, настоящее изобретение не ограничено конфигурациями, формирующими коллимированные следящие пучки. Если используются сходящиеся или расходящиеся следящие пучки, неточности позиционирования фокуса облучающего пучка будут изменять степень сходимости или расходимости пучка. Специалистам в данной области техники должно быть ясно, что устройство восприятия фокусировки, соответствующее изобретению, может быть использовано для формирования дифференциального сигнала ошибки фокусировки в ответ на такие изменения в сходимости или расходимости пучка.
Таким образом, показано, что соответствующее изобретению устройство восприятия фокусировки преодолевает недостатки известных систем определения фокусировки за счет обеспечения отраженного и переданного пучков по существу одинаковой формы и интенсивности, из которых дифференциальным методом может быть получен высокоточный не чувствительный к высоте сигнал ошибки фокусировки. Раскрытый здесь способ восприятия фокусировки тем не менее сохраняет характеристики, свойственные некоторым родственным системам определения фокусировки с низкой чувствительностью к механическим вибрациям, сниженной чувствительностью к наклону диска и с увеличенной термической стабильностью.
Исполнительный механизм поиска (подвода к требуемой дорожке диска)
На фиг.41 схематично представлен принцип действия примера выполнения оптической системы записи/считывания 4-50 при считывании данных из точно определенного положения 4-52 на носителе информации, например на оптическом диске 4-54. Хотя система 4-50 показана как система однократной записи, специалистам должно быть ясно, что блок каретки и исполнительного механизма, соответствующий изобретению, может быть также использован в магнитооптических системах со стиранием информации. Информация передается на диск 4-54 и считывается с него с помощью светового пучка 4-56, формируемого источником света 4-58, проходящего через множество компонентов, включая расщепитель пучка в форме кубика 4-60, который разделяет световой пучок 4-56 по поляризации, четвертьволновую пластину 4-62, которая изменяет поляризацию светового пучка 4-56, коллиматорную линзу 4-64 и линзу объектива 4-66, которая направляет световой пучок в требуемое положение 4-52 на диске 4-54.
При работе устройства источник света 4-58, в типовом случае лазерный диод, излучает световой пучок 4-56 в направлении выпуклой коллиматорной линзы 4-64. Коллиматорная линза 4-64 преобразует этот световой пучок 4-56 в параллельный линейно S-поляризованный световой пучок 4-70 и направляет его на расщепитель пучка 4-60. Этот расщепитель в форме кубика образован из двух прямоугольных призм 4-72 и 4-74, скрепленных между собой по их соответствующим гипотенузам, и включает поляризационно-чувствительное покрытие, образующее лучерасщепляющую поверхность перехода 4-76 между двумя гипотенузами. Расщепитель пучка 4-60 разделяет и/или объединяет световые пучки различных поляризационных состояний, в частности линейной S-поляризации и линейной Р-поляризации. Разделение выполняется с использованием поляризационно-чувствительного покрытия, которое пропускает линейно Р-поляризованные световые лучи и отражает линейно S-поляризованные световые лучи. Свет, выходящий из расщепителя 4-60, проходит через четвертьволновую пластину 4-62, которая преобразует линейно поляризованный световой пучок 4-70 в кругополяризованный световой пучок 4-78. После выхода из четвертьволновой пластины 4-62 этот кругополяризованный пучок попадает в исполнительный механизм 4-80.
Исполнительный механизм 4-80 содержит зеркало 4-82, которое ортогонально отражает световой пучок 4-78 вверх в направлении линзы объектива 4-66. Эта линза объектива 4-66 сводит кругополяризованный пучок 4-78 в точно определенную фокальную точку 4-52 на поверхности оптического диска 4-54. После падения на диск 4-54 кругополяризованный световой пучок 4-78 изменяется за счет информации, запомненной на диске 4-54, и отражается в виде расходящегося кругополяризованного светового пучка 4-84, несущего информацию, идентичную закодированной на диске 4-54. Этот отраженный кругополяризованный световой пучок 4-84 повторно входит в линзу объектива 4-66, где он коллимируется. Световой пучок 4-84 вновь отражается от зеркала 4-82 и повторно входит в четвертьволновую пластину 4-62. После выхода из четвертьволновой пластины 4-62 кругополяризованный пучок 4-84 преобразуется в линейно Р-поляризованный световой пучок 4-86. Так как линейно Р-поляризованные световые пучки передаются через расщепитель пучка 4-60 без отражения на лучерасщепляющей поверхности, этот пучок 4-86 поступает на фотодетектор 4-88, который детектирует данные, запомненные на диске 4-54. Кроме того, если световой пучок 4-86, падающий на фотодетектор 4-88, расфокусирован или разъюстирован, то степень расфокусировки или разъюстировки измеряется электронными средствами и используется в качестве обратной связи для следящей системы (не показана), которая повторно юстирует линзу объектива 4-66.
На фиг. 42 представлен электромагнитный блок каретки и исполнительного механизма 4-100, выполненный в соответствии с изобретением. Блок может использоваться совместно с оптическим модулем 4-102 для записи и считывания данных на поверхности оптического диска, как описано со ссылками на фиг.41, причем источник света 4-58, детектор 4-88, коллимирующая линза 4-64, четвертьволновая пластина 4-62 и расщепитель пучка 4-60 находятся в оптическом модуле 4-102. Электродвигатель 4-104 шпинделя размещен рядом с блоком 4-100 и приводит во вращение оптический диск (не показан) относительно оси вращения А над блоком 4-100. Блок 4-100 включает каретку 4-106 с первой и второй опорными поверхностями 4-108 и 4-110, установленными с возможностью скольжения по первой и второй направляющим 4-112 и 4-114 соответственно, и исполнительный механизм 4-116, установленный на каретке 4-106. Как можно видеть, направляющие 4-112 и 4-114 образуют раму, на которой перемещается каретка. Пучок света 4-120 от источника света 4-58 в оптическом модуле 4-102 поступает в исполнительный механизм 4-116 через круговую апертуру 4-118 и отражается зеркалом, содержащимся внутри исполнительного механизма через линзу объектива 4-122, определяющую оптическую ось О к поверхности диска. Как легко понять, ось вращения А диска параллельна оптической оси О линзы объектива 4-122.
Каретка 4-106 и исполнительный механизм 4-116 перемещаются горизонтально по направляющим 4-112 и 4-114 в направлении трекинга с помощью привода грубого трекинга для обеспечения доступа к различным дорожкам с записью информации на поверхности диска. Привод трекинга включает два постоянных магнита 4-130 и 4-132, причем каждый магнит прикреплен к С-образному внешнему полюсному наконечнику 4-134 и 4-136 соответственно. Два внутренних полюсных наконечника 4-138 и 4-140 размещены поперек концов внешних полюсных наконечников 4-134 и 4-136 с образованием прямоугольной рамы вокруг постоянных магнитов 4-130 и 4-132. Две катушки грубого трекинга 4-142 и 4-144 равной длины прикреплены к вертикальным пластинам 4-174 и 4-176 (фиг.43) и окружают внутренние полюсные наконечники 4-138 и 4-140 с зазором, достаточным для перемещения по полюсным наконечникам 4-138 и 4-140, когда каретка 4-106 перемещается в направлении трекинга. В этом варианте выполнения катушки грубого трекинга 4-142 и 4-144 являются единственными подвижными компонентами привода грубого трекинга. Как будет пояснено ниже, исполнительный механизм 4-116 также может перемещать линзу объектива 4-122, приближая или удаляя ее относительно диска, при этом фокусируя световой пучок 4-120 в необходимом положении на поверхности диска.
На фиг. 43 представлен вид с пространственным разнесением элементов, включающий каретку 4-106 и исполнительный механизм 4-116. Каретка 4-106 содержит по существу прямоугольное основание 4-150, на котором закреплен исполнительный механизм 4-116. Основание 4-150 имеет существенно плоскую верхнюю поверхность 4-152, имеющую прямоугольную камеру 4-154, образованную в нем. Первая опорная поверхность 4-108 имеет цилиндрическую форму, а вторая опорная поверхность 4-110 состоит из двух эллиптических опорных секций 4-160 и 4-162 примерно равной длины, которые встречаются внутри основания 4-150. Расстояние от направляющих 4-112 и 4-114 до оптической оси О выбрано так, что каждая опорная поверхность 4-108, 4-110 испытывает одну и ту же степень предварительной нагрузки. Опорные поверхности 4-108 и 4-110 кроме того выполнены так, что обе из них имеют одну и ту же величину площади своей поверхности, контактирующую с направляющими 4-112 и 4-114. Длина опорных секций, образующих вторую опорную поверхность, примерно равна длине первой опорной поверхности, хотя допустимы незначительные отклонения в длине для учета износа.
Две вертикальные стенки 4-156 и 4-158 проходят вверх от верхней поверхности 4-152 основания 4-150 рядом с торцами камеры 4-154. Основание 4-150 кроме того содержит две области 4-164 и 4-166 платформы, образованные на концах основания 4-150 над опорными поверхностями 4-108 и 4-110. Уступ 4-168 соединяет верхнюю поверхность 4-152 основания 4-150 с второй областью 4-166 платформы. Первый U-образный вырез 4-170 образован в первой области 4-164 платформы, а второй U-образный вырез 4-172 образован во второй области 4-166 платформы и уступа 4-168.
Катушки грубого трекинга 4-142 и 4-144 прикреплены к двум вертикальным пластинам 4-174 и 4-176 соответственно. Пластины 4-174 и 4-176 позиционированы соответственно в вырезах 4-180 и 4-182, образованных в торцах основания 4-150. Основание 4-150, кроме того, содержит плату балансировки массы 4-184, которая прикреплена к нижней поверхности 4-186 основания 4-150 посредством винта 4-188, и выступ балансировки массы 4-190, который выступает наружу от основания 4-150 рядом с катушкой грубого трекинга 4-142. Круговая апертура 4-192 образована в передней стороне 4-194 основания 4-150 и обеспечивает прохождение светового пучка 4-120, излученного оптическим модулем 4-102 (фиг. 42). Кронштейн 4-196 с круговым отверстием 4-198 размещен между второй вертикальной стенкой 4-158 и первой областью 4-164 платформы вдоль передней стороны 4-194 основания 4-150. Кронштейн 4-196 кроме того имеет вырез 4-200 для размещения фотодетектора 4-202 таким образом, что фотодетектор располагается между кронштейном 4-196 и первой областью 4-164 платформы.
Исполнительный механизм 4-116, часто называемый 2D-приводом для двух направлений перемещения, т. е. фокусировки и трекинга, размещен на основании 4-150 между вертикальными стенками 4-156 и 4-158 областей 4-164 и 4-166 платформы. Призма (не показана) размещена внутри камеры 4-154 в основании 4-150 для отклонения светового пучка 4-120, излученного из оптического модуля 4-102 таким образом, что пучок 4-120 выходит из исполнительного механизма 4-116 через линзу объектива 4-122. Линза объектива 4-122 размещена в держателе линзы 4-210, прикрепленном к приводу фокусировки и точного грекинга, который перемещает линзу 4-122 так, чтобы прецизионно отъюстировать и сфокусировать выходящий пучок 4-120 в требуемом положении на поверхности оптического диска. Линза объектива 4-122 определяет оптическую ось О, которая проходит вертикально через центр линзы.
Компоненты исполнительного механизма 4-116 лучше всего показаны на фиг. 44. Держатель линзы 4-210 обычно имеет прямоугольную форму и включает обычно прямоугольное отверстие 4-212, образованное в нем. Верхняя поверхность 4-214 держателя линзы 4-210 содержит круговую обойму 4-216, размещенную между двумя буртиками 4-218 и 4-220. Круговая апертура 4-222 с диаметром, существенно равным диаметру обоймы 4-216, образована в нижней поверхности 4-224 держателя линзы. Прямоугольная катушка фокусировки 4-230 размещена внутри прямоугольного отверстия 4-212 в держателе линзы 4-210. Две овальные катушки точного трекинга 4-232 и 4-234 размещены в углах первого торца 4-240 катушки фокусировки 4-230, и две идентичные катушки трекинга 4-236 и 4-238 размещены в углах второго торца 4-242 катушки фокусировки 4-230. Первая пара U-образных полюсных наконечников 4-244 размещена вокруг первого торца 4-240 катушки фокусировки 4-230 и скрепленных с ней катушек трекинга 4-232 и 4-234; вторая пара U-образных полюсных наконечников 4-246 окружает второй торец 4-242 катушки фокусировки 4-230 и скрепленные с ней катушки трекинга 4-236 и 4-238. Кроме того, два постоянных магнита 4-250 и 4-252 размещены между соответствующими парами полюсных наконечников 4-244 и 4-246, рядом с соответствующими катушками трекинга 4-232, 4-234, 4-236, 4-238.
Два верхних изгибных кронштейна 4-260 и 4-262 прикреплены к верхней поверхности 4-214 держателя линзы 4-210, а два других нижних изгибных кронштейна 4-264 и 4-266 прикреплены к нижней поверхности держателя линзы 4-210. Каждый изгибный кронштейн предпочтительно состоит из тонкого листа травленого или штампованного металла (обычно стали или берилиево-медного сплава) с толщиной порядка от 25 до 75 мкм. Для простоты будет описан только один из изгибных кронштейнов 4-260. Ясно, что остальные имеют идентичную конструкцию. Изгибный кронштейн 4-260 имеет первую вертикальную секцию 4-270, прикрепленную к первой, второй и третьей горизонтальным секциям 4-272, 4-274, 4-276. Третья горизонтальная секция 4-276 кроме того прикреплена к перпендикулярной поперечине 4-280. Первая горизонтальная секция 4-272 включает буртик 4-278, который прикреплен к соответствующему буртику 4-218 на держателе линзы 4-210. Аналогично, буртик второго верхнего изгибного кронштейна 4-262 прикреплен к соответствующему буртику 4-220, в то время как нижние кронштейны 4-264 и 4-266 прикреплены к соответствующим конструктивным элементам на нижней поверхности держателя линзы 4-210.
Кронштейны 4-260, 4-262, 4-264 и 4-266 кроме того прикреплены к опорному элементу 4-290. Опорный элемент 4-290 содержит центральный вырез 4-292, в который входит вторая пара полюсных наконечников 4-246. Выступ 4-294 образован на каждой стороне выреза 4-292 на верхней и нижней поверхностях опорного элемента 4-290. Поперечные секции 4-280 кронштейнов 4-260 и 4-262 прикреплены к этим выступам 4-292, а кронштейны 4-264 и 4-266 соединены с соответствующими выступами внизу опорного элемента 4-290 так, чтобы совместно обеспечивать подвеску держателя линзы 4-210 относительно опорного элемента 4-290. Опорный элемент 4-290 кроме того содержит отверстие 4-296 для размещения светодиода 4-300. Диод 4-300 съюстирован с апертурой 4-198 в кронштейне 4-196 (фиг. 43), а фотодетектор 4-202 размещен внутри выреза 4-200 в кронштейне, так что при запитке светодиода 4-300 по существу коллимированный луч излучается через апертуру 4-198 в кронштейне 4-196 и падает на фотодетектор 4-202. В зависимости от положения держателя линзы 4-210 относительно опорного элемента 4-290 свет, излученный диодом 4-300, будет падать на различные части детектора 4-202. Анализируя количество света, падающего на детектор 4-202, можно сформировать сигнал коррекции положения для определения величины смещения, требуемой для точной фокусировки и трекинга относительно требуемого положения на поверхности диска.
В показанном примере выполнения масса точного привода включает держатель линзы 4-210, линзу объектива 4-122, катушку фокусировки 4-230, катушки точного трекинга 4-232, 4-234, 4-236, 4-238. Масса каретки включает основание 4-150, катушки грубого трекинга 4-142 и 4-144, кронштейн 4-196, фотодетектор 4-292, опорный элемент 4-290, вертикальные пластины 4-174 и 4-176, пластину балансировки массы 4-184, винт 4-188, постоянные магниты 4-250 и 4-252, полюсные наконечники 4-244 и 4-246 и опорные поверхности 4-108 и 4-110.
В соответствии с приведенным выше описанием фиг.43 и 44, катушки грубого трекинга 4-142 и 4-144 имеют одинаковые размеры и симметричны относительно оптической оси О линзы объектива. Кроме того, пары катушек трекинга 4-232, 4-234 и 4-236, 4-238 имеют одинаковые размеры и симметричны относительно оптической оси О линзы 4-122. Размеры пластины балансировки масс 4-184 и выступа балансировки масс 4-190 предпочтительно выбраны для компенсации массы опорного элемента 4-290 кронштейнов 4-260, 4-262, 4-264, 4-266, опорных поверхностей 4-108, 4-110, кронштейна 4-196 и фотодетектора 4-202, так что центр масс каретки и центр масс приводов точного трекинга и фокусировки (включая полюсные наконечники 4-244, 4-246, постоянные магниты 4-250, 4-252, катушку фокусировки 4-230 и катушки трекинга 4-232, 4-234, 4-236, 4-238) пересекаются оптической осью О линзы 4-122. Как будет пояснено ниже, совмещение этих центров тяжести с оптической осью О линзы 4-122 и симметрия сил привода и сил реакции, действующих на каретку 4-106 и исполнительный механизм 4-116, гарантируют сведение к минимуму нежелательных перемещений, которые отрицательно влияют на позиционирование линзы объектива 4-122.
Как показано на фиг.45, постоянные магниты 4-130, 4-132 рядом с катушками грубого трекинга 4-142, 4-144 генерируют магнитное поле В, линии потока которого проходят внутрь в направлении катушек грубого трекинга 4-142, 4-144. Если необходимо перемещение грубого трекинга для позиционирования линзы объектива 4-122 рядом с выбранной дорожкой на оптическом диске, то к катушкам грубого трекинга 4-142, 4-144 прикладывается ток. Этот ток взаимодействует с магнитным полем В для формирования сил, перемещающих каретку 4-106 в направлении трекинга. Силы генерируются согласно закону Лоренца: F= B. X. I. l, где, как указано выше, F - сила, действующая на катушку фокусировки, В - плотность магнитного потока магнитного поля между двумя постоянными магнитами, I - ток, протекающий через катушку фокусировки, l - длина катушки. Например, если ток I, приложенный к первой катушке грубого трекинга 4-142, протекает через часть катушки, находящуюся в магнитном поле В, в направлении в плоскости фиг. 45, то формируется сила Fcoarse1 в направлении стрелки 4-320. Аналогично, если ток I протекает через части второй катушки трекинга 4-144, находящиеся в магнитном поле В, в направлении от плоскости фиг. 45, то формируется сила Fcoarse2 в направлении стрелки 4-322. Силы Fcoarse1 и Fcoarse2 обеспечивают перемещение каретки 4-106 по горизонтали влево.
И наоборот, на фиг. 46 показано, что если направление тока l в частях катушек трекинга 4-142, 4-144, находящихся в магнитном поле В, изменено на обратное, то формируются силы Fcoarse1' и Fcoarse2', которые перемещают каретку в плоскость чертежа на фиг.46 (вправо на фиг.45). Величина перемещения в направлении трекинга зависит от величины тока в катушках грубого трекинга 4-142 и 4-144. Таким образом, каретка 4-106 перемещается для позиционирования линзы объектива 4-122 таким образом, чтобы выходящий из нее лазерный луч 4-120 фокусировался на требуемой дорожке записи информации на поверхности оптического диска.
Когда управляющий сигнал формируется в оптическом модуле 4-102, требуемый ток прикладывается к катушкам точного трекинга 4-232, 4-234, 4-236 и 4-238 или к катушке фокусировки 4-230 в зависимости от требуемого направления перемещения держателя линзы 4-210 и связанной с ним линзы объектива 4-122. Такая следящая система и цепи обратной связи, управляющие величиной тока, хорошо известны в технике. Этот ток взаимодействует с электромагнитным полем постоянных магнитов 4-250 и 4-252 для создания силы, смещающей держатель линзы 4-210 и связанную с ним линзу объектива 4-122 в необходимом направлении трекинга или фокусировки. Например, если необходимо повторное позиционирование в направлении фокусировки в соответствии с сигналом ошибки фокусировки, этот сигнал передается на следящий усилитель (не показан), который формирует ток, протекающий через катушку фокусировки 4-230. Как указано выше, формируется сила в соответствии с законом Лоренца F=B.X.I.l.
Как показано на фиг.47, постоянные магниты 4-250 и 4-252 2D-привода 4-116 ориентированы так, что южные полюса магнитов 4-250, 4-252 обращены к держателю линзы 4-210. В такой конфигурации формируется магнитное поле В, линии потока которого выходят из магнитов 4-250, 4-252 и направляются внутрь в направлении держателя линзы 4-210, как показано. Когда ток I, приложенный к катушке фокусировки 4-230, протекает через части катушки 4-230, находящиеся в магнитном поле В, в показанном направлении, то в каждой части катушки фокусировки генерируется направленная вверх сила Ffocus, которая передается на кронштейны 4-260, 4-262, 4-264, 4-266, изгибая их для перемещения держателя линзы 4-210 вместе с линзой объектива 4-122 ближе к оптическому диску. И наоборот, если ток I протекает через части катушек в направлениях, противоположных показанным, то генерируется направленная вниз сила, воздействующая на кронштейны и перемещающая держатель линзы 4-210 вместе с линзой объектива 4-122 от поверхности оптического диска. Величина смещения зависит от величины тока, приложенного к катушке фокусировки 4-230. Перемещая линзу объектива 4-122 ближе или дальше от поверхности оптического диска, катушка фокусировки 4-230 обеспечивает точную фокусировку лазерного пучка 4-120, выходящего из линзы объектива 4-122, на требуемой дорожке записи информации на диске.
Как показано на фиг.48, перемещение исполнительного механизма 4-116 для обеспечения точного трекинга реализуется путем генерирования тока в четырех катушках точного трекинга 3-232, 4-234, 4-236, 4-238, прикрепленных к катушке фокусировки 3-230. Когда ток, приложенный к катушкам трекинга, протекает в показанных направлениях через части катушек трекинга, находящиеся в магнитном поле В, формируются силы Ftrack, перемещающие держатель линзы 4-210 вправо. Когда силы Ftrack действуют на катушки трекинга 4-232, 4-234, 4-236, 4-238, они передаются через катушку фокусировки 4-230 и держатель линзы 4-210 к кронштейнам 4-260, 4-262, 4-264, 4-268, которые изгибаются в соответствующем направлении и линза объектива 4-122 перемещается в направлении сил, вправо на фиг.48. Если ток протекает через катушки трекинга 4-232, 4-234, 4-236, 4-238 в противоположном направлении, то формируется сила, обеспечивающая перемещение держателя линзы 4-210 влево. Величина тока, прикладываемого к катушкам точного трекинга 4-232, 4-234, 4-236, 4-238, относительно мала по сравнению с величиной тока, прикладываемого к катушкам грубого трекинга 4-242, 4-244, и размеры катушек точного трекинга намного меньше, чем размеры катушек грубого трекинга. Это приводит к увеличению резонансных частот и позволяет реализовать более высокие полосы частот слежения, что позволяет осуществлять управление с меньшими ошибками трекинга.
На фиг. 49А-56В схематично представлен блок исполнительного механизма и каретки 4-100, который иллюстрирует симметрию и баланс сил, обеспечиваемые в настоящем изобретении.
На фиг.49А представлена диаграмма, иллюстрирующая симметрию сил грубого трекинга, действующих на исполнительный механизм 4-116 в горизонтальной плоскости. Если ток приложен к катушкам грубого трекинга 4-142, 4-144, как описано выше, то формируются силы Fcoarse1 и Fcoarse2, которые центрированы в части катушек грубого трекинга 4-142, 4-144, расположенной рядом с постоянными магнитами 4-130, 4-132 соответственно. Размеры первой катушки грубого трекинга 4-142 выбраны равными размерам второй катушки грубого трекинга 4-144, токи, протекающие в каждой катушке, равны, так что силы Fcoarse1 и Fcoarse2, действующие на катушки, также равны. Кроме того, катушки грубого трекинга 4-142, 4-144 размещены на равных расстояниях Lc1, Lc2 от линзы объектива 4-122, так что результирующие моменты относительно оптической оси О линзы объектива 4-122 равны и рыскание каретки сведено к минимуму. На фиг. 49В центры сил Fcoarse1 и Fcoarse2 грубого привода показаны в вертикальной плоскости. Так как эти силы совмещены по вертикали с центром масс каретки СМс (т. е. пересекаются линией, ортогональной радиальному направлению и оптической оси О, содержащей центр масс каретки СМс), моменты относительно горизонтальной оси равны, и поэтому тангаж каретки, который может обусловить отклонение угла луча призмой, вводя тем самым смещение трекинга, уменьшается.
Силы привода точного трекинга в горизонтальной и вертикальной плоскостях показаны на фиг.50А и 50В. Силы Ftrack1 и Ftrack2, формируемые возбуждением катушек точного трекинга 4-232, 4-234, 4-236, 4-238 в магнитном поле постоянных магнитов 4-250 и 4-252, центрированы между парами катушек точного трекинга 4-232, 4-234 и 4-236, 4-238 и проходят горизонтально в направлении трекинга. Размеры катушек равны и величины токов, прикладываемых к катушкам, также равны, поэтому равны и величины результирующих сил Ftrack1 и Ftrack2. Кроме того, катушки точного трекинга 4-232, 4-234, 4-236, 4-238 размещены на одинаковых расстояниях от Lт относительно оптической оси О линзы объектива 4-122, поэтому моменты относительно оптической оси О равны, так что рыскание держателя линзы 4-210 с линзой 4-122 относительно вертикальной оси уменьшено. Как показано на фиг.50В, результирующая сила точного трекинга Ftrack действует на центр масс CMf точного привода так, что тангаж держателя линзы уменьшается.
Фиг. 51А иллюстрирует силы реакции Freact1 и Freact2 от привода точного трекинга, которые действуют на каретку 4-106, противодействуя силам привода точного трекинга Ftrack1 и Ftrack2, показанным на фиг.50А. Эти силы реакции Freact1 и Freact2 действуют на полюсные наконечники 4-244 и 4-246, размещенные над катушками трекинга 4-232, 4-234, 4-236, 4-238 с каждой стороны от держателя линзы 4-210. Как описано выше, величины сил трекинга Ftrack1 и Ftrack2 равны. Кроме того размеры полюсных наконечников 4-244, 4-246 равны, так что формируемые силы реакции Freact1 и Freact2 также равны. Так как полюсные наконечники 4-244 и 4-246 размещены на одинаковых расстояниях LR от оптической оси О линзы 4-122, моменты относительно оптической оси О равны по величине, что уменьшает поворот относительно вертикальной оси или рыскание. На фиг.51В показана результирующая сила реакции Freact в вертикальной плоскости. Эта сила действует в центре масс СМF точного привода на расстоянии LRM над центром масс СМс, таким образом на каретку 4-106 действует момент. Так как расстояние LRM и силы реакции Freact1 и Freact2 весьма малы, то указанный момент весьма мал и не оказывает существенного влияния на характеристики каретки.
Результирующие силы фокусировки Ffocus1 и Ffocus2, действующие на исполнительный механизм 4-116, показаны на фиг.52А. Силы фокусировки Ffocus1 и Ffocus2 центрированы в частях катушки фокусировки катушки 4-230, расположенных между катушками трекинга 4-232, 4-234, 4-236, 4-238 и полюсными наконечниками 4-244, 4-246 рядом с постоянными магнитами 4-250 и 4-252. Катушка фокусировки 4-230 намотана в отверстии 4-212 держателя линзы 4-210 (фиг. 44), так что ток одной и той же величины протекает через каждую сторону катушки 4-230 рядом с магнитами, формируя одинаковые силы Ffocus1 и Ffocus2 на сторонах держателя линзы 4-210, перемещающие держатель линзы с линзой объектива 4-122
в вертикальном направлении. Катушка размещена симметрично в отверстии 4-212 держателя линзы 4-210, так что центры сил Ffocus1 и Ffocus2 расположены эквидистантно на расстояниях LF от оптической оси О линзы объектива 4-122. В такой конфигурации моменты, формируемые относительно оптической оси О линзы 4-122, равны, что уменьшает крен держателя линзы 4-210. Как показано на фиг.52В, при наблюдении с торца каретки, силы фокусировки Ffocus1 и Ffocus2 (на чертеже Ffocus) совмещены с центром масс СМс каретки, что позволяет уменьшить тангаж каретки 4-106.
Силы реакции FFR1 и FFR2, формируемые в ответ на силы фокусировки Ffocus1 и Ffocus2, показанные на фиг.52А, представлены на фиг.53А в горизонтальной плоскости. Силы реакции FFR1 и FFR1 равны по величине и противоположны по направлениям силам фокусировки Ffocus1 и Ffocus2 и центрированы рядом с постоянными магнитами 4-250, 4-252 точного привода между полюсными наконечниками 4-244, 4-246. Как описано выше, силы фокусировки Ffocus1 и Ffocus2 равны, следовательно, силы реакции FFR1 и FFR2 также равны. Кроме того, силы реакции FFR1 и FFR2 действуют на равных расстояниях LFR от оптической оси О линзы объектива 4-122, что дополнительно уменьшает тангаж. Кроме того, как показано на фиг.53В, при наблюдении с торца каретки 4-106, силы реакции FFR1 и FFR2 (на чертеже FFR) совмещены с центром масс СМс каретки, что уменьшает тангаж каретки.
Силы Fflex1 и Fflex2, генерируемые изгибными кронштейнами 4-260, 4-262, 4-264, 4-266 на держателе линзы 4-210, показаны на фиг.54. Это силы, действующие на верхние кронштейны 4-260, 4-262. Ясно, что идентичные силы действуют на нижние кронштейны 4-262, 4-266. Силы Fflex1 и Fflex2, действующие на верхние кронштейны 4-260, 4-262, центрированы на поперечных секциях 4-280 указанных кронштейнов, где они прикреплены к опорному элементу 4-290. Когда силы Fflex1 и Fflex2 действуют на кронштейны 4-260 и 4-262, последние изгибаются в соответствующем направлении для обеспечения точного трекинга. Для поддержания кронштейнов 4-260, 4-262 в их изогнутом состоянии точный привод генерирует силы реакции FRA и FRВ, которые центрированы на полюсных наконечниках 4-244, 4-246 с каждой стороны от держателя линзы 4-210. Силы Fflex1 и Fflex2 действуют на расстоянии Lflex от оптической оси О линзы фокусировки 4-122, а силы реакции FRA и FRB действуют на расстоянии LRA и LRB от оптической оси О соответственно. Ясно, что моменты, формируемые относительно оптической оси О линзы 4-122 парами сил, не равны, так как (Fflex1+Fflex2) не равно (FRALRA+FRBLRB). Однако, поскольку эти силы эффективно развязаны от каретки, за исключением очень низких частот (в типовом случае ниже 40 Гц), эти силы не влияют на эффективность исполнительного механизма при большинстве обычных рабочих условий.
Как описано выше, каретка 4-106 имеет две опорные поверхности 4-108 и 4-110, которые установлены с возможностью скольжения на направляющих 4-112 и 4-114 для размещения каретки 4-106 рядом с различными дорожками с записью данных на оптическом диске. По существу опорные поверхности 4-108 и 4-110 действуют как "пружины", которые удерживают каретку 4-106 над направляющими 4-112 и 4-114. Силы жесткости опорных "пружин" Fbearing1 и Fbearing2 показаны на фиг. 55А. Силы Fbearing1 и Fbearing2 центрированы в точке контакта между опорными поверхностями 4-108 и 4-110 и направляющими 4-112 и 4-114 и проходят вниз через центр направляющих. Как описано выше, площадь поверхностного контакта между опорной поверхностью 4-108 и направляющей 4-112 примерно равна площади поверхностного контакта между опорной поверхностью 4-110 и направляющей 4-114, таким образом, эти силы жесткости Fbearing1 и Fbearing2 по существу равны. Опорные поверхности 4-108 и 4-110 размещены на одинаковых расстояниях Lbearing от оптической оси О линзы 4-122, так что моменты относительно оптической оси О, формируемые этими силами Fbearing1 и Fbearing2, равны, что минимизирует рыскание. Как показано на фиг.55В, в вертикальной плоскости равнодействующая сил подвески каретки Fbearing действует в точке между двумя опорами и совмещена с оптической осью О.
Силы трения Ffriction1A, Ffriction1B и Ffriction2, действующие на опорные поверхности 4-108, 4-110 и направляющие 4-112 и 4-114, показаны на фиг. 56А. Так как первая опорная поверхность 4-108 имеет две секции 4-160 и 4-162, то существуют две силы трения Ffriction1A и Ffriction1B, каждая из которых связана с соответствующей секцией 4-160 и 4-162, центрированные в середине опор вдоль площади контакта с направляющей 4-114. Вторая сила трения Ffriction2 действует на вторую опорную поверхность 4-108 и центрирована в середине опоры вдоль ее контакта с направляющей 4-112, как показано. Так как площадь контакта опорных секций 4-160 и 4-162, образующих первую опорную поверхность 4-110, существенно равна площади контакта второй опорной поверхности 4-108, и величина предварительной нагрузки и коэффициент трения одинаковы для обеих опорных поверхностей, то сумма сил трения Ffriction1A и Ffriction1B равна силе трения Ffriction2. Опорные поверхности 4-112 и 4-114 расположены на одинаковых расстояниях LF от оптической оси О линзы фокусировки 4-122 и результирующие моменты относительно оптической оси линзы также равны. В вертикальной плоскости силы Ffriction1A, Ffriction1B и Ffriction2 действуют на площадях контакта между направляющими 4-112, 4-114 и опорными поверхностями 4-108, 4-110 (фиг.56В), которые предпочтительно спроектированы совмещенными по горизонтали с центром масс СМс каретки, так что моменты относительно центра масс, обуславливающие тангаж каретки, уменьшены.
Фиг. 57-60 иллюстрируют силы инерции, действующие на каретку 4-106 и исполнительный механизм 4-116 как для вертикальных, так и для горизонтальных ускорений. Силы инерции, действующие на точный привод и каретку в ответ на вертикальное ускорение блока, показаны на фиг.57. Первая направленная вниз сила инерции FIF (фиг.57 и 58А) равна массе точного привода, умноженной на ускорение, действующее на центр масс СМF точного привода. Вторая направленная вниз сила инерции FIC (фиг.57 и 58В) действует в центре масс СМс каретки и равна массе каретки, умноженной на ускорение. Фиг.58А и 58В кроме того иллюстрируют, что силы инерции FIF и FIC совмещены по горизонтали с оптической осью О линзы объектива 4-122.
На фиг.59А показаны силы инерции, действующие на катушки грубого трекинга 4-142, 4-144 и полюсные наконечники точного привода 4-244, 4-246 для горизонтальных ускорений каретки и точного привода соответственно. Сила инерции FIC1 действует в центре верхней части первой части катушки грубого трекинга 4-142, а сила инерции FIC2 действует в центре верхней части второй катушки грубого трекинга 4-144. Как описано выше, катушки 4-142 и 4-144 имеют одинаковые размеры, так что масса первой катушки 4-142 равна массе второй катушки 4-144. Величина каждой силы FIC1 и FIC2 равна массе соответствующей катушки, умноженной на ускорение, следовательно, силы инерции, действующие на катушки 4-142 и 4-144, равны. Так как катушки 4-142 и 4-144 размещены на одинаковых расстояниях Lc от оптической оси О линзы объектива 4-122, результирующие моменты относительно оптической оси линзы, формируемые силами инерции FIC1 и FIC2, равны. Аналогично, поскольку полюсные наконечники точного привода 4-244 и 4-246 имеют одинаковые размеры и размещены на одинаковых расстояниях LP от оптической оси О, то силы инерции FIC1 и FIC2, действующие на полюсные наконечники, равны и, следовательно, равны результирующие моменты относительно оптической оси линзы объектива 4-122. Применяя этот же анализ ко всем другим компонентам или "субчастям" блока каретки и исполнительного механизма, как более подробно будет пояснено ниже, получим, что силы инерции, формируемые горизонтальными и вертикальными ускорениями, выше резонансной частоты изгибных кронштейнов, уравновешены и симметричны относительно оптической оси О. Равнодействующие сил инерции точного привода и каретки FIF и FIC, действующие на блок в случае горизонтальных ускорений, действуют, таким образом, вдоль линии, проходящей через центр каретки, который пересекает оптическая ось О, как показано на фиг.59В. Равнодействующая сила инерции, обусловленная грубым приводом. FIC, равна массе грубого привода, умноженной на ускорение, причем равнодействующая сила инерции, обусловленная точным приводом, FIF, равна массе точного привода, умноженной на ускорение.
На высоких частотах, при ускорениях в направлении трекинга выше резонансной частоты изгибных кронштейнов держателя линзы, примерно 40 Гц, компоненты блока 4-100 развязаны и не влияют на позиционирование линзы объектива 4-122. Следовательно, силы инерции отличаются для ускорений выше и ниже резонансной частоты изгибного кронштейна. Силы инерции для горизонтальных ускорений при таких высоких частотах показаны на фиг.60А. На таких высоких частотах исполнительный механизм 4-116 развязан от каретки 4-106, так что первая сила инерции FI1,равная массе точного привода, умноженной на ускорение, действует в центре масс СМF точного привода, а вторая сила инерции FI2, равная массе грубого привода, умноженной на ускорение, центрирована в центре масс СМс каретки.
На фиг.60В показаны силы инерции при горизонтальных ускорениях ниже резонансной частоты изгибного кронштейна. На таких низких частотах масса точного привода и масса каретки перемещаются как единый блок, который имеет центр масс СМс'. Как показано, этот результирующий центр масс СМс' размещен на расстоянии х по вертикали над центром масс СМс каретки, и таким образом, силы грубого привода Fcoarse1 и Fcoarse2 и силы трения Ffriction1 и Ffriction2 больше не совмещены с центром масс каретки, теперь смещенным в положение СМс'. Хотя имеет место этот вертикальный сдвиг в центре масс каретки, симметричность конструкции блока 4-100 гарантирует, что центр масс СМс каретки не смещается в горизонтальной плоскости, и силы, действующие на каретку, остаются симметричными относительно центра масс и оптической оси О, несмотря на вертикальный сдвиг центра масс от СМс до СМс'.
Кроме того, симметрия конструкции гарантирует, что горизонтальное смещение центра масс не происходит, если составные части или компоненты каретки развязаны по высоким частотам. Например, на частотах в диапазоне кГц полюсные наконечники точного привода 4-244, 4-246 и магниты 4-250, 4-252 будут развязаны. Вследствие симметрии конструкции, однако, центр масс не будет смещаться в горизонтальной плоскости. Поскольку отсутствует сдвиг центра масс СМс в горизонтальной плоскости, то силы реакции привода фокусировки не будут вызывать тангаж или крен каретки на частотах выше тех, при которых эти составные части становятся "связанными". Таким образом, за счет горизонтальной юстировки центра масс с оптической осью О линзы объектива 4-122 линза находится в таком положении, в котором на ее положение в минимальной степени влияют силы резонанса, привода и реакции, действующие на блок 4-100.
На фиг. 61А и 61В представлены передаточные характеристики положения трекинга в зависимости от тока привода исполнительного механизма 4-116, соответствующего изобретению, для линзы объектива массой 0,24 г, подвешенной в точном приводе с массой 1,9 г. Как показано на фиг.61А, исполнительный механизм имеет почти идеальную характеристику 4-310 с наклоном примерно 40 дБ на декаду и идеальную характеристику фазового сдвига 4-312 (фиг.61В). Две характеристики в дБ и фазового сдвига идентифицированы линиями графиков 4-310 и 4-312 соответственно. На фиг.61С и 61D показана та же самая передаточная функция для линзы, смещенной от центра по горизонтали или в направлении трекинга на 0,15 мм. Обе показанные характеристики, в дБ и фазового сдвига (графики 4-410' и 4-412') соответственно выявляют возмущения или выбросы, возникающие при 3,2 кГц. Запас по фазе падает примерно до 25o, снижая демпфирование цепи и увеличивая время установки и перерегулирование. Для позиционирования линзы это означает, что горизонтальный сдвиг в положении линзы нарушает симметрию или баланс сил точного трекинга, действующих на линзу, и приводит к появлению момента относительно оптической оси линзы, обуславливающему рыскание. Таким образом, можно видеть, что уравновешивание сил в блоке 4-100 относительно оптической оси О линзы объектива 4-122 заметно улучшило позиционирование при трекинге.
Фиг.62А-62С иллюстрируют влияние асимметричных сил фокусировки, действующих на блок 4-100. На фиг.62А представлен сигнал трекинга в виде линии графика 4-320, при пересечении дорожек, для шага дорожки 1,5 мкм, причем каждой синусоидальной волне соответствует информационная дорожка на поверхности оптического диска. На фиг.62В сила фокусировки центрирована в центре масс CMf точного привода и на оптической оси О. Верхний график 4-322 показывает ток, прикладываемый к катушке фокусировки в операции, а нижний график 4-324 показывает сигнал ошибки трекинга при отслеживании конкретной дорожки, для тока фокусировки 0,1 А и ускорения фокусировки 0,75 м/с2. Как показано, сигнал ошибки трекинга видимым образом не подвергается влиянию уровня тока фокусировки. На фиг. 62С показано влияние на ток и сигналы ошибки фокусировки, как на фиг.62В, если сила фокусировки смещена из состояния совмещения с оптической осью О и центром масс CMf примерно на 0,2 мм. Соответствующие кривые показаны как графики 4-422' и 4-424' соответственно. Сигнал тренинга теперь явным образом испытывает влияние тока фокусировки. При том же токе фокусировки и ускорении получено смещение трекинга 0,022 м. В типовом случае полное допустимое смещение дорожки в оптическом дисководе находится в пределах от 0,05 мкм до 0,1 мкм, следовательно, путем юстировки сил, как показано на фиг.62В, можно существенно уменьшить смещение трекинга.
Альтернативный вариант блока каретки и исполнительного механизма 4-400, в котором центр масс 2D-привода совпадает с центром масс каретки, показан на фиг. 63. В дополнение к симметрии относительно оптической оси линзы объектива, центр масс точного привода совпадает с центром масс каретки и совмещен с оптической осью. Блок каретки и исполнительного механизма 4-100 в первом варианте пригоден для большинства частотных диапазонов. Блок 4-400, соответствующий альтернативному варианту выполнения изобретения, однако, может быть использован в системах, где желательно избежать сдвига центра масс каретки на частотах ниже резонансной частоты изгибных кронштейнов.
Блок 4-400 содержит каретку 4-406, имеющую первую и вторую опорные поверхности 4-408 и 4-410, существенно идентичные использованным в блоке 4-100, которые могут быть с возможностью скольжения смонтированы на направляющих (не показаны), и 2D-привод 4-416, установленный на каретке 4-406. Каретка 4-406 содержит пару катушек грубого трекинга 4-412 и 4-414, размещенных в соответствующих вырезах 4-417 и 4-418, выполненных в каретке 4-406 рядом с опорными поверхностями 4-408 и 4-410, которые перемещают каретку 4-406 в горизонтальном направлении трекинга (фиг.65) для достижения различных дорожек с записью информации на поверхности оптического диска.
Исполнительный механизм 4-416 содержит держатель линзы 4-420 с установленной на нем линзой объектива 4-422. Пара выступов 4-424 на верхней поверхности каретки 4-406 поддерживают пару верхних кронштейнов 4-426, прикрепленных к верхним поверхностям пары выступов 4-428 на держателе линзы 4-420. Пара нижних кронштейнов 4-429, идентичных по структуре верхним кронштейнам 4-426, поддерживаются соответствующими выступами внизу каретки (не показано) и прикреплены к нижним поверхностям выступов 4-428 держателя линзы 4-420. Пучок света 4-430 поступает в исполнительный механизм 4-416 через овальную апертуру 4-432 и отражается зеркалом (не показано), размещенным внутри исполнительного механизма 4-416, через линзу объектива 4-422 вдоль оптической оси О'. Исполнительный механизм 4-416 также прикреплен к приводу фокусировки и точного трекинга, который перемещает линзу 4-422 для обеспечения точной юстировки и фокусировки выходящего пучка в требуемое положение на поверхности оптического диска. Привод фокусировки и точного трекинга содержит два постоянных магнита 4-440 и 4-442, прикрепленных к противоположным концам держателя линзы 4-420. Овальная катушка точного трекинга 4-444 прикреплена к каждому постоянному магниту 4-440 и 4-442 рядом с опорными поверхностями 4-408 и 4-410 каретки. Катушка фокусировки 4-408 прикреплена к верхней и нижней поверхностям каретки 4-406 и поддерживается выступами, образованными внутри каретки, так что держатель линзы 4-420 расположен между катушками фокусировки 4-448.
Перемещение грубого трекинга каретки 4-406 и исполнительного механизма 4-416 осуществляется аналогично рассмотренному для блока 4-100 по фиг.46 и 47. Если ток приложен к катушкам грубого трекинга 4-412 и 4-414 в присутствии магнитного поля, то, согласно закону Лоренца, генерируется сила, перемещающая каретку 4-406 и исполнительный механизм 4-416 в направлении трекинга (фиг.65) для позиционирования линзы объектива 4-422 рядом с различными информационными дорожками на оптическом диске.
Фиг. 64 иллюстрирует принцип работы исполнительного механизма 4-416 при перемещении держателя линзы 4-420 и линзы объектива 4-422 в направлении фокусировки. Когда в катушках фокусировки генерируется ток, в каждой из катушек индуцируется электромагнитное поле 4-450. Электромагнитное поле 4-450 отличается по направлению для соответствующих катушек фокусировки. В показанном примере оба постоянных магнита 4-440 и 4-442 будут притягиваться нижней катушкой фокусировки 4-448 (не показано) и отталкиваться верхней катушкой фокусировки 4-448, тем самым перемещая держатель линзы объектива 4-420 к нижней катушке фокусировки 4-448 и от верхней катушки фокусировки 4-448 для позиционирования линзы объектива 4-422 дальше от поверхности оптического диска, причем величина смещения зависит от напряженности индуцированного магнитного поля.
Аналогично, фиг.65 иллюстрирует взаимодействие постоянных магнитов 4-440 и 4-442 с катушками точного трекинга 4-444. Возбуждение этих катушек перемещает держатель линзы 4-420 по горизонтали в направлении трекинга вправо или влево, в зависимости от направления тока в катушках. Например, для показанного на чертеже магнитного поля 4-460 держатель линзы 4-420 с линзой объектива 4-422 перемещаются влево. Таким образом, катушки точного трекинга 4-444 обеспечивают точное позиционирование светового пучка, выходящего из линзы объектива 4-422 в центре требуемой информационной дорожки на оптическом диске.
В последующем обсуждении идентичные силы и длины соответствуют упомянутым для блока 4-100. Для удобства описания будет использован символ " ' " при обсуждении соответствующих величин при ссылках на фиг.46, 49В, 50А, 51А-53А, 55А, 56А, 58А и 58В, использованных при обсуждении сил и длин, относящихся к блоку 4-100.
Как описано выше, привод грубого трекинга работает идентично соответствующему приводу блока 4-100. Катушки грубого трекинга 4-412 и 4-414 имеют идентичные размеры и размещены на одинаковых расстояниях от оптической оси О' линзы объектива 4-422. Одинаковые токи приложены к катушкам, так что соответствующие силы Fcoarse1' и Fcoarse2' (фиг.46), действующие на каретку 4-406, действуют на одинаковых расстояниях Lc1' и Lc2' (фиг.49В) от оптической оси О'. В вертикальной плоскости в радиальном направлении эти силы совмещены с совпадающими центрами тяжести соответственно массы точного привода с СМF' (фиг.58А) и массы каретки СМс' (фиг.58В), что минимизирует тангаж каретки и исполнительного механизма. Аналогично, опорные поверхности 4-408 и 4-410 размещены на одинаковых расстояния от оптической оси О', так что силы подвески каретки также симметричны относительно этой оси. Каждая из сил Fbearing1' и Fbearing2' (фиг.55А) действуют на одинаковом расстоянии Lbearing1', так что формируемые относительно оптической оси моменты равны и тангаж каретки и исполнительного механизма дополнительно уменьшается. Площади поверхности опор, контактирующие с направляющими, по существу равны, так что силы трения, действующие на каретку 4-406, также равны. Так как опорные поверхности 4-408 и 4-410 размещены эквидистантно от оптической оси О', то моменты относительно этой оси равны, что уменьшает рыскание каретки и исполнительного механизма. Блок сконструирован так, что силы трения по вертикали совмещены с центром масс каретки 4-406 и исполнительного механизма 4-416.
Катушки точного трекинга 4-444 имеют одинаковые размеры, и приложенные к ним токи равны, так что силы трекинга, действующие на исполнительный механизм, равны. Кроме того, катушки 4-444 размещены на одинаковых расстояниях LT' (фиг.50А) от оптической оси О', так что моменты относительно этой оси равны. В вертикальной плоскости эти силы Ftrack1' и Ftrack2' (фиг.50А) совмещены с центрами тяжести исполнительного механизма 4-416 и каретки 4-406, так, что тангаж исполнительного механизма 4-416 уменьшен. Так как силы точного трекинга, действующие на блок, равны, силы реакции Freact1' и Freact2' (фиг. 51А), формируемые в ответ на силы трекинга Ftrack1' и Ftrack2', также равны. Эти силы реакции действуют на одинаковых расстояниях LR' от оптической оси и по вертикали совмещены с центрами тяжести, так что моменты относительно оптической оси О' равны и рыскание уменьшено.
Аналогично, катушки фокусировки 4-448 имеют по существу одинаковые размеры и приложенные к ним токи формируют одинаковые силы Ffocus1' и Ffocus2', действующие на исполнительный механизм. В этом устройстве катушки фокусировки 4-448 размещены на равных расстояниях LF' (фиг.56А) от совпадающих центров тяжести массы точного привода и массы каретки, так что моменты относительно оптической оси О' равны. Кроме того, так как силы фокусировки Ffocus1' и Ffocus2' (фиг.52А) равны, силы реакции фокусировки FFR1' и FFR2' (фиг. 53А), действующие на массу точного привода, равны и действуют на одинаковых расстояниях FFR' (фиг.53А) от совпадающих центров тяжести массы каретки СМс' и массы точного привода СМF'. Таким образом моменты, формируемые силами реакции относительно оптической оси О', равны и тангаж исполнительного механизма дополнительно снижен.
Изгибные силы Fflex1', Fflex2', действующие на исполнительный механизм, и силы реакции точного привода FRA', FRВ', формируемые в ответ на изгибные силы, по существу те же самые, что и показанные на фиг.54 для блока 4-100. Так как силы изгиба и реакции не симметричны относительно оптической оси О', моменты, формируемые этими парами сил относительно оси О', не равны. Эти силы, однако, эффективно развязаны от каретки 4-406, за исключением нижних частот (в типовом случае ниже 40 Гц), так что эти моменты не ухудшают характеристики исполнительного механизма при большинстве рабочих условий.
Таким образом, силы привода и реакции, действующие на блок 4-400, симметричны относительно оптической оси О' и совмещены по вертикали с центрами тяжести массы точного привода СМF' и массы каретки СМс'. Так как центры тяжести массы точного привода и массы каретки совпадают, развязка исполнительного механизма 4-416 или любого субблока блока 4-400 не будет смещать центр масс, и силы и моменты, действующие на блок 4-400, будут оставаться уравновешенными практически для всех горизонтальных и вертикальных ускорений.
Анаморфическая ахроматическая призменная система
На фиг.66 показана известная оптическая система 5-100, содержащая источник света 5-102, формирующий падающий световой пучок 5-106, показанный пунктиром, простую анаморфическую призму 5-108, фокусирующую линзу 5-110 и оптический носитель 5-112. Световой пучок 5-106 входит в призму 5-108 под углом падения 5-114 относительно нормали к входной грани 5-116 призмы. Лазерный источник света обычно генерирует эллиптический пучок с некоторой степенью астигматизма, как хорошо известно из уровня техники. Анаморфическая призма 5-108 обеспечивает растяжение вдоль малой оси эллипса, корректируя эллиптичность пучка. Угол падения 5-114 выбирается так, чтобы обеспечить требуемое растяжение вдоль малой оси. Анаморфическая призма 5-108 может также корректировать астигматизм в падающем световом пучке 5-106. Линза 5-110 фокусирует результирующий скорректированный пучок 5-118 с образованием пятна 5-120 на оптическом носителе.
Простая призма 5-108 адекватна, пока длина волны падающего светового пучка сохраняется постоянной. На практике, однако, источник света обычно изменяет длину волны вследствие температурных изменений, сдвигов мощности, случайных "перескоков мод" и других условий, как хорошо известно из предшествующего уровня техники. В магнитооптических системах с носителями на дисках мощность лазера непрерывно смещается по уровню между уровнем мощности, требуемым для операций записи, и уровнем мощности, требуемым для операций считывания.
Угол преломления света на границе перехода двух материалов вычисляется по закону Снелля:
n1 sinθ1 = n2 sinθ2,
где n1 - коэффициент преломления материала 1;
θ1 - угол падения относительно нормали;
n2 - коэффициент преломления материала 2;
θ2 - угол преломления относительно нормали.
Это соотношение определяет преломление светового пучка 5-106, входящего в призму 5-108. Как показано на фиг.66, когда падающий пучок 5-106 с одной длиной волны входит в анаморфическую призму 5-108, пучок преломляется под заданным углом, определяемым коэффициентом преломления призмы 5-108 и углом падения 5-114 светового пучка 5-106. Полученный в результате световой пучок, скорректированный по эллиптичности и, возможно, по астигматизму падающего пучка 5-106, входит в фокусирующую линзу 5-110 и формирует сфокусированное световое пятно 5-120 на оптическом носителе 5-112. Коэффициент преломления, однако, изменяется с изменением длины волны. Это явление известно как хроматическая аберрация. Соответственно, когда длина волны падающего светового пучка 5-106 изменяется, угол преломления, обусловленный границей перехода между воздухом и призмой 5-108, становится отличным от угла преломления для предшествующей длины волны. На фиг.66 пунктиром показан эффект сдвига длины волны падающего пучка 5-106. Падающий световой пучок 5-106 преломляется под другим углом и формирует в результате световой пучок 5-122, который входит в фокусирующую линзу 5-110 под другим углом с образованием сфокусированного пучка 5-124 на оптическом носителе. Как показано на фиг.66, световое пятно 5-124 смещено относительно пятна 5-120. Это смещение, являющееся результатом изменения длины волны падающего светового пучка, называют боковым смещением пучка.
Бокового смещения пучка можно избежать, отказавшись от использования анаморфической призмы 5-108. Например, система может использовать круговую призму для обеспечения кругового пятна на оптическом носителе. При формировании кругового пучка с помощью линзы, однако, линза только фокусирует круговую апертуру в пределах эллиптического светового пучка. Это приводит к неэффективному использованию мощности лазера, так как части светового пучка вне круговой апертуры теряются. Соответственно, система, которая не использует анаморфическую призму для формирования пучка, не может использовать преимущества коррекции с помощью призм эллиптичности и астигматизма падающего светового пучка. Возможности формирования пучка, обеспечиваемые анаморфической призмой, позволят эффективно использовать лазерную мощность за счет растяжения эллиптического пучка в круговой пучок. Эффективное использование мощности предпочтительно, в частности, в системах с оптическими дисками, когда увеличение уровня мощности необходимо для осуществления записи на диск.
На фиг. 67 показана обычная конфигурация многоэлементной призменной системы 5-130, хорошо известная из уровня техники. Система состоит из трех призменных элементов: призмы 5-132, призмы 5-134 и призмы 5-136, фокусирующей линзы 5-138 и оптической среды 5-140 отражательного типа. Призменная система 5-130 может быть спроектирована ахроматической за счет выбора геометрических соотношений для индивидуальных призм, коэффициентов преломления и дисперсий для призм 5-132, 5-134 и 5-136.
Призменная система 5-130, показанная на фиг.67, также обеспечивает отражение обратного луча от оптического носителя 5-140 к системе детектирования 5-144 за счет включения светорасщепляющей тонкой пленки 5-146 между призмой 5-134 и призмой 5-136.
Как показано на фиг.67, входной световой пучок 5-148 проходит через призмы 5-132, 5-134 и 5-136 и затем фокусируется линзой 5-138 с образованием пятна 5-137 на оптическом носителе 5-140. Световой пучок 5-148 отражается от оптического носителя 5-140 назад через фокусирующую линзу 5-138 в призму 5-136 и отражается от тонкой пленки 5-146 в виде светового пучка 5-150. Световой пучок 5-150 затем поступает в систему детектирования 5-144.
При построении системы ахроматической, изменения в длине волны входного светового пучка 5-148 не приведут к боковому смещению сфокусированного светового пучка 5-137 на оптическом носителе 5-140.
Как объяснено выше, в оптической системе может быть предпочтительным использование более одного детектора. Призменная система с воздушным промежутком на траектории прохождения светового пучка может обеспечить существенные преимущества, в частности, обеспечивая компактную, ахроматическую призменную систему, способную отражать части падающего и обратного пучков на множество детекторов. Кроме того, за счет использования воздушного промежутка симметричная корректирующая призма может быть добавлена к существующей анаморфической призменной системе. И наконец, единая призменная система с воздушным промежутком будет эффективно обеспечивать стабильность, компактность, простоту изготовления и установки блока призм.
Для более подробного объяснения конструкции ахроматической призменной системы с воздушным промежутком между призмами, ссылки будут делаться на фиг.68, где изображена двухэлементная призменная система 5-152, имеющая хроматическую корректирующую призму 5-154, добавленную к простой анаморфической призме 5-156. Корректирующая призма 5-154 имеет коэффициент преломления n1, а простая анаморфическая призма 5-156 имеет коэффициент преломления n2 на выбранной длине волны. Углы в системе представлены, как показано на фиг.68, углами Ф, а1, а2, а3, а4, а5, а6, а7, β1,β2 и βair. Угол отклонения между падающим пучком и выходным пучком α, где
α = β1+βair-(a7+Φ+β2),
а a7 может быть вычислено путем повторного применения закона Снелля и геометрических соотношений для треугольников.
Условия проектирования выбраны так, чтобы обеспечить требуемый результат (т. е. полное отклонение в системе). Например, для проектирования ахроматической системы условие состоит в том, что угол α должен быть постоянным в некотором диапазоне длин волн.
Для угла полного требуемого отклонения, α = A, между входным пучком и выходным пучком, это условие удовлетворяется следующим образом:
A = β1+βair-(a7+Φ+β2)
Кроме того, условие, состоящее в том, что корректирующая призма 5-154 является симметричной призмой, при отсутствии результирующего растяжения падающего светового пучка, так что она может быть добавлена к простой анаморфической призме 5-156, как показано на фиг.68, состоит в следующем:
Φ = sin-1[n1*sin(β1/2)]
При выборе этого условия корректирующая призма 5-154 не растягивает падающий световой пучок. Корректирующая призма поэтому может быть добавлена к существующей анаморфической призменной системе, выбранной для обеспечения соответствующего растягивания.
И наконец, блок призм 5-152 может удовлетворять всем требуемым ограничениям при проектировании за счет соответствующего выбора Ф, β1,β2,βair и дисперсий стекла.
В некоторых случаях может быть желательно, чтобы выходящий пучок имел существенное угловое отклонение от падающего пучка. Например, отклонение 90o может быть предпочтительным. Это может быть осуществлено путем обеспечения полного внутреннего отражения в призме 5-156 перед выходом пучка из призмы. Это изменяет вышеприведенные расчетные соотношения, но цели проектирования могут быть удовлетворены за счет надлежащего выбора параметров.
Применяя вышеприведенные принципы дополнения симметричной корректирующей призмы к существующей анаморфической призме, была спроектирована призменная система с множеством поверхностей для частичного отражения обратного пучка к различным детекторам. Ниже описаны примеры выполнения унитарной ахроматической призменной системы с воздушным промежутком, характеризуемой значительными угловыми отклонениями между входным и выходным пучками и обеспечивающей множество отражений к различным системам детектирования.
На фиг.69 показан пример выполнения анаморфической ахроматической призменной системы 5-170 с воздушным промежутком, соответствующей изобретению. Предпочтительно призменная система 5-170 имеет три призмы, связанные в единый блок. Как пояснялось выше, это обеспечивает преимущество, состоящее в том, что призменный блок 5-170 монтируется как единый блок. Поскольку призмы связаны между собой, не требуется устанавливать их отдельно в оптической системе. Это уменьшает время установки, повышает стабильность системы, снижает затраты на установку и минимизирует функциональные отклонения между различными оптическими системами. Тремя призменными элементами являются пластинчатая призма 5-172, трапецеидальная призма 5-174 и корректирующая призма 5-176. На фиг.69 также показан путь прохождения светового пучка в виде светового пучка 5-178 от источника света 5-102, светового пучка 5-180 в воздушном зазоре, выходного/отраженного светового пучка 5-182, светового пучка 5-184 канала первого детектора к первому детектору 5-185, светового пучка 5-186 канала второго детектора к второму детектору 5-187 и светового пучка 5-188 канала третьего детектора к третьему детектору 5-189. За счет включения воздушного промежутка между корректирующей призмой 5-176 и пластинчатой призмой 5-172, через которую проходит световой пучок 5-180 воздушного промежутка, корректирующая призма 5-176 может проектироваться как симметричный корректор при нулевом результирующем растяжении падающего пучка 5-178. Поэтому корректирующая призма 5-176 может быть добавлена к пластинчатой призме 5-172 и к трапецеидальной призме 5-174, для того чтобы сделать призменную систему 5-170 ахроматической.
На фиг.69 также показана линза 5-190, обеспечивающая фокусировку выходного светового пучка 5-182 на носителе 5-191. Описаны характеристики системы, представленной на фиг. 69, спроектированной по существу ахроматической для расчетной длины волны 785 +/-22 нм. На этой длине волны система имеет свойства, описанные ниже.
Пластинчатая призма 5-172 детально показана на фиг.70, 70А и 70В. На фиг. 70 показан вид сбоку пластинчатой призмы 5-172, на фиг.70А - вид снизу, иллюстрирующий поверхность S1 5-200 и на фиг.70В - вид сверху, иллюстрирующий поверхность S2 5-202. Пластинчатая призма имеет оптическую поверхность S1 5-200, оптическую поверхность S2 5-202, оптическую поверхность S3 5-204, поверхность S4 5-206 и поверхность S5 5-208. В одном варианте поверхности S1 5-200 и S2 5-202 по существу параллельны и разнесены на расстояние 5-210. В данном варианте расстояние 5-210 равно 6,27 мм. Поверхности S5 5-208 и S3 5-204 также по существу параллельны. Поверхности S1 5-200 и S3 5-204 пересекаются вдоль ребра 5-211 (ребро S1/S2) под углом 5-212 (угол S1/S2), предпочтительно под углом, равным 50o 21'+/-10'. Поверхности S3 5-204 и S2 5-202 пересекаются вдоль ребра 5-214; поверхности S2 5-202 и S4 5-206 пересекаются вдоль ребра 5-216; поверхности S4 5-206 и S5 5-208 пересекаются вдоль ребра 5-218; поверхности S5 5-208 и S1 5-200 пересекаются вдоль ребра 5-220, как показано на фиг.70. Поверхность S2 5-202 имеет длину 5-222 и ширину 5-224. В данном варианте длина 5-222 равна 13,34 мм, а ширина 5-224 равна 8,0 мм. Общая длина призмы, обозначенная 5-225 на фиг.70, от ребра 5-218 до ребра 5-211, измеренная параллельно поверхности S1 5-200, предпочтительно равна 23,61 мм. Расстояние от ребра 5-218 до ребра 5-220, обозначенное 5-227, измеренное вдоль опорной плоскости 5-226, определенной перпендикуляром к поверхности S1 5-200 и S2 5-202, предпочтительно равно 2,14 мм. Вид сверху на фиг.70А показывает незатененный раскрыв 5-230 и незатененный раскрыв 5-232, определенные на поверхности S1 5-200. Незатененный раскрыв - это область поверхности призмы, в пределах которой поверхность имеет определенное качество. В данном примере незатененные раскрывы 5-230 и 5-232 представляют собой овалы размерами 8,5 мм на 6,5 мм. Предпочтительно апертура 5-230 центрирована своей малой осью на расстоянии 5-233 от ребра 5-211, а своей большой осью - в середине поверхности S1 5-200. Незатененный раскрыв 5-232 центрирован малой осью на расстоянии 5-234 от ребра 5-220 и большой осью - вдоль середины поверхности S1 5-200. Предпочтительно расстояние 5-233 равно 6,15 мм, а расстояние 5-234 равно 5,30 мм.
Вид сверху, представленный на фиг.70В, иллюстрирует незатененный раскрыв 5-235 на поверхности S2 5-202. В данном примере этот незатененный раскрыв определен как овал размерами 8,5 мм на 6,5 мм с его малой осью, центрированной на расстоянии 5-236 от ребра 5-214 и большой осью - в середине поверхности S2 5-202, как показано на фиг.70В.
В данном примере расстояние 5-236 равно 5,2 мм. Незатененные раскрывы 5-230, 5-232 и 5-235 определяют части поверхностей, в которых качество поверхности предпочтительно определено по меньшей мере как 40/20, как хорошо известно из уровня техники. В данном примере в качестве оптического материала призмы 5-172 выбрано отожженное стекло ВК7 класса А.
На фиг. 71 представлена трапецеидальная призма 5-174 для устройства по фиг. 69. Трапецеидальная призма 5-174 имеет оптическую поверхность S6 5-240, оптическую поверхность S7 5-242, оптическую поверхность S8 5-244, оптическую поверхность S9 5-246. Поверхности S6 5-240, S7 5-242 пересекаются вдоль ребра 5-248. Поверхности S7 5-244, S8 5-244 пересекаются вдоль ребра 5-250 под углом 5-251. Угол 5-251 предпочтительно равен 135o. Поверхности S8 5-244, S9 5-246 пересекаются вдоль ребра 5-252 под углом 5-254, предпочтительно равным 50o 21'. Поверхности S9 5-246, S6 5-240 пересекаются вдоль ребра 5-256. Поверхность S6 5-240 имеет длину 5-258, предпочтительно равную 9,5 мм. Поверхность S65-240 и поверхность S8 5-244 по существу параллельны и разнесены на расстояние 5-260, предпочтительно равное 8,0 мм, измеренное в направлении, перпендикулярном поверхности S6 5-240 и поверхности S8 5-244. Ребра 5-250 и 5-248 разнесены на расстояние 5-261 вдоль плоскости 5-262, определенной параллельно поверхности S8 5-244. Предпочтительно расстояние 5-261 равно 8,0 мм. На фиг.71А представлен вид сверху трапецеидальной призмы 5-174, иллюстрирующий поверхность S6 5-240 и поверхность S9 5-246. Трапецеидальная призма 5-174 имеет толщину 5-263, предпочтительно равную 8 мм. Как показано на фиг. 71А, поверхность S6 5-240 имеет незатененный раскрыв 5-264, предпочтительно представляющий собой круговую апертуру диаметром 6,5 мм, центрированную по ширине поверхности и на расстоянии 5-265 от ребра 5-248. Предпочтительно расстояние 5-265 равно 4,0 мм. Поверхность S9 5-246 имеет круговую апертуру 5-266, центрированную на поверхности, предпочтительно определяемую как овал размерами 6,5 мм на 8,5 мм.
На фиг.71В представлен вид снизу трапецеидальной призмы 5-174, иллюстрирующий поверхность S7 5-242 и поверхность S8 5-244 с незатененными раскрывами 5-268 и 5-270. Трапецеидальная призма 5-174 имеет длину 5-272 от ребра 5-252 до ребра 5-248, измеренную вдоль опорной плоскости 5-262. Предпочтительно длина 5-272 составляет 16,13 мм. В одном варианте незатененный раскрыв 5-268 для поверхности S7 5-242 определяется как овал размерами 6,5 мм на 9,2 мм, центрированный на поверхности S7 5-242 своей малой осью параллельно и в центре между ребрами 5-248 и 5-250. Предпочтительно, незатененная апертура 5-270 представляет собой овал размерами 6,5 мм на 6,7 мм, центрированный на поверхности S8 5-244, своей большой осью центрированный параллельно между ребрами 5-250 и 5-252. Предпочтительно, качество поверхности незатененных раскрывов 5-264, 5-266, 5-268 и 5-270 определяется как 40/20, как известно из уровня техники.
Многие из поверхностей в призмах имеют покрытия для облегчения функционирования призм. В данном варианте поверхность S6 5-240 имеет противоотражающее покрытие с пропусканием больше или равно 99,9% при угле падения 90o +/-0,5o. Поверхность S8 5-244 имеет покрытие с пропусканием больше или равно 98,5% при угле падения 10,7o +/-0,5o для внутреннего падающего света. Поверхность S9 5-246 имеет тонкопленочное покрытие с низким затуханием с отражением s-поляризационного состояния (Rs) (т.е. нормально к плоскости падения) более 90% и с отражением р-поляризационного состояния (Rp)=12,5% +/-2/5% при угле падения 39o 39' +/- 0,5o. Материал для трапецеидальной призмы 5-174 в данном варианте, показанном на фиг.69, 71-71В, представляет собой отожженное оптическое стекло ВК7 класса А.
Хроматическая корректирующая призма 5-176 в варианте выполнения призменной системы 5-170 по фиг.69 представлена более детально на фиг.72 и 72А. Как показано, хроматическая корректирующая призма 5-176 имеет оптическую поверхность S10 5-290, оптическую поверхность S11 5-292 и поверхность S12 5-294, образующие треугольную призму. Поверхности S11 5-292, S12 5-294 пересекаются вдоль ребра 5-296. Поверхности S10 5-290, S12 5-294 пересекаются вдоль ребра 5-298. Предпочтительно, поверхности S10 5-290, S11 5-292 симметричны. Поверхность S12 5-294 имеет длину 5-300, равную в данном примере 7,78 мм. Таким образом, ребра 5-296 и 5-298 разнесены на расстояние 5-300. Поверхности S10 5-290, S11 5-292 приближаются друг к другу под углом 5-302, предпочтительно равным 38o 20'. Поверхности S11 5-292 и S10 5-290 заканчиваются на расстоянии 5-303 от поверхности S12 5-294, измеренном перпендикулярно поверхности S12 5-294, предпочтительно равном 10,5 мм.
На фиг. 72А представлен вид поверхности S10 5-290. Призма 5-176 имеет толщину 5-304, предпочтительно равную 8,0 мм. Поверхность S10 5-290 имеет овальный незатененный раскрыв 5-306, центрированный большой осью параллельно пересечению 5-298 на расстоянии 5-308 от него. Малая ось центрирована на поверхности S10 5-290, как показано. Предпочтительно, незатененный раскрыв 5-306 определен как овал размерами 6,5 мм на 2,8 мм, а качество поверхности раскрыва 5-306 определено как 40/20. Поверхность S11 5-292 также имеет сходный незатененный раскрыв.
Как и для трапецеидальной призмы 5-174, хроматическая корректирующая призма 5-176 имеет покрытия на некоторых поверхностях. В одном варианте поверхности S10 5-290 и S11 5-292 имеют антиотражательное покрытие (отражательная способность меньше или равна 3% при угле падения 35,5o +/-1,0o). В качестве материала корректирующей призмы 5-176 выбрано отожженное стекло SFII, класс А.
Если призмы собраны в единую призменную систему 5-170 (фиг.69), световые пучки отражаются, как показано и объяснено ниже для длины волны 785 +/-22 нм. Для целей описания опорная плоскость 5-237 определена вдоль одной стороны призменной системы 5-170 (фиг.69А). Падающий пучок 5-178 от источника света 5-102 падает на поверхность S10 5-290 под углом падения 5-326 параллельно опорной плоскости 5-237.
Световой пучок 5-178 выходит из призмы 5-176 в воздушный зазор в виде светового пучка 5-180 и входит в призму 5-172 через поверхность S2 5-202. Часть светового пучка отражается от тонкой пленки на поверхности S9 5-246 и выходит через поверхность S3 5-204 в виде светового пучка 5-188. В одном устройстве пучок 5-178 может быть направлен на систему детектирования 5-189. Так этот отраженный пучок представляет собой часть входного пучка, система детектирования 5-189, получающая световой пучок 5-188, может контролировать интенсивность падающего светового пучка. Остальная часть светового пучка, которая не отражается от тонкой пленки на поверхности S9 5-246, проходит в трапецеидальную призму 5-174, отражается внутренне на поверхности S7 5-242 и выходит в виде светового пучка 5-182 через поверхность S6 5-240.
В описываемом примере, если угол падения 5-326 светового пучка 5-178 равен 35o 26', то световой пучок выходит из призмы 5-174 с полным угловым отклонением от входного пучка 5-178 до выходного пучка 5-182, равным 87o 37' +/-5', параллельно опорной плоскости 5-237 в пределах допуска 5', а световой пучок 5-182 выходит по нормали к поверхности S6 5-240 в пределах допуска 5'.
Линза 5-190 фокусирует световой пучок 5-182 на оптическом носителе 5-191. Световой пучок отражается назад через линзу и входит по нормали к поверхности S6 5-240, отражается внутренне на поверхности S7 5-242 и затем отражается на тонкой пленке между трапецеидальной призмой 5-174 и пластинчатой призмой 5-172. Результирующий луч выходит из трапецеидальной призмы 5-174 через поверхность S8 5-244 в виде светового пучка 5-184 с углом отклонения 5-328. Световой пучок 5-184 поступает в первый детектор 5-185.
Часть светового пучка, возвращенного от оптического носителя 5-190, также проходит через тонкую пленку, отражается на поверхности S2 5-202 и выходит из пластинчатой призмы 5-172 в виде светового пучка 5-186. Это отражение обусловлено воздушным промежутком в призменной системе. В одном варианте световой пучок 5-184 и световой пучок 5-186 могут быть направлены на отдельные системы детектирования 5-185 и 5-187 соответственно. Например, система детектирования 5-185 может получать сигналы данных, а система детектирования 5-187 - управляющие сигналы (т.е. информацию о фокусировке и трекинге).
Как пояснено выше, описанное устройство является по существу ахроматическим в пределах типового диапазона изменений длины волны обычного лазерного источника света. Соответственно смещения в длине волны падающего пучка заметно не влияют на результирующее положение сфокусированного пучка в боковом направлении на оптическом носителе 5-190.
Результаты математического моделирования характеристик призменной системы 5-170 для изменений длины волны от 780 до 785 нм представлены в табл.А. Здесь Phi - угол падения на корректирующую призму (в данном варианте 35o 26'), а его отклонения оцениваются как +/-0,5o. Сдвиг волны представлен в одном столбце, а соответствующий сдвиг сфокусированного пучка от призменной системы представлен в столбцах для углов падения Phi +/-0,5o. Например, как показано в первой строке табл.А, для сдвига длины волны падающего светового пучка 780 - 781,5 нм сфокусированное пятно смещается на -0,2 нм для угла падения Phi, на 2,6 нм для угла падения Phi-0,5o и на -2,9 нм для угла падения Phi+0,5o.
Как видно из табл.А, боковое смещение при угле падения Phi изменяется менее чем на 1 нм для сдвига длины волны от 780 до 783 нм с изменением угла падения Phi. Это контрастирует с боковым смещением порядка 200 нм для сдвига длины волны 3 нм в устройстве, подобном описанному, но без хроматической коррекции. Этот результат показывает по существу ахроматическая система.
На фиг. 73 показана призменная система 5-339, согласно другому варианту настоящего изобретения. Данное устройство имеет корректирующую призму 5-340, пластинчатую призму 5-342 и четырехугольную призму 5-344. Корректирующая призма 5-340 и пластинчатая призма 5-342 соответствуют корректирующей призме 5-136 и пластинчатой призме 5-172 призменной системы 5-170 (фиг.69). Четырехугольная призма 5-344, однако, отличается от трапецеидальной призмы 5-344.
Четырехугольная призма 5-344 более детально показана на фиг.74, 74А и 74В. Она имеет поверхности S13 5-346, S14 5-348, S15 5-350 и S16 5-353, которые похожи но не идентичны поверхностям S6 5-240, S7 5-242, S8 5-244 и S9 5-246 трапецеидальной призмы 5-174. Поверхности S13 5-346 и S14 5-348 пересекаются вдоль ребра 5-353 под углом 5-354; поверхности S14 5-348 и S15 5-350 пересекаются вдоль ребра 5-355 под углом 5-356, поверхности S15 5-350 и S16 5-352 пересекаются вдоль ребра 5-357 под углом 5-358, и поверхности S16 5-352 и S13 5-346 пересекаются вдоль ребра 5-349. В одном варианте угол 5-354 равен 49o 40', угол 5-356 равен 135o и угол 5-358 равен 50o 21'. Расстояние между ребрами 5-353 и 5-355, измеренное перпендикулярно поверхности S15 5-350, обозначено на фиг.74, как 5-360 и предпочтительно равно 8,0 мм. Расстояние между ребрами 5-353 и 5-359 обозначено 5-362 и предпочтительно равно 8,9 мм при измерении параллельно поверхности S15 5-350 и, наконец, расстояние между ребрами 5-353 и 5-355, измеренное вдоль плоскости, параллельной поверхности S15 5-350, обозначено 5-364 и предпочтительно равно 8,0 мм.
На фиг. 74А представлен вид сверху поверхности S13 5-346 и поверхности S16 5-352. Толщина призмы 5-344, обозначенная 5-368, предпочтительно равна 8,0 мм. Призма 5-344 имеет незатененный раскрыв 5-370 на поверхности S13 5-346 и незатененный раскрыв 5-372 на поверхности S16 5-352, как показано на фиг. 74 А. В предпочтительном варианте незатененный раскрыв 5-370 представляет собой круговую апертуру, центрированную на указанной поверхности на расстоянии 5-374 от ребра 5-353. В одном варианте незатененный раскрыв 5-370 представляет собой круговую апертуру с минимальным диаметром 6,5 мм, а расстояние 5-374 равно 4,0 мм. Предпочтительно поверхность S16 5-352 также имеет незатененный раскрыв 5-372, центрированный на указанной поверхности. В одном варианте незатененный раскрыв 5-372 представляет собой овал, размерами 6,5 мм на 8,5 мм, центрированный на поверхности S16 5-352, как показано на фиг.74А.
На фиг. 74В представлен вид сверху поверхности S14 5-348 и поверхности S15 5-350. Общая длина призмы 5-344 от ребра 5-353 до ребра 5-357, измеренная вдоль плоскости, параллельной поверхности S15 5-350, обозначена 5-380 и предпочтительно равна 16,13 мм. Как показано на фиг.74В, поверхность S14 5-348 имеет незатененный раскрыв 5-382, центрированный на указанной поверхности, а поверхность S15 5-350 - незатененный раскрыв 5-348, центрированный на поверхности. В одном варианте раскрыв 5-382 представляет собой овал размерами 6,5 мм на 9,2 мм, а раскрыв 5-384 - овал размерами 6,5 мм на 6,7 мм.
Предпочтительно четырехугольная призма 5-344 также имеет покрытия на некоторых оптических поверхностях. В одном варианте поверхность S13 5-346 имеет покрытие с отражательной способностью, меньшей или равной 0,2% при угле падения 4o 40' +/-5' относительно нормали для внутренне падающего света. В том же варианте поверхность S15 5-350 имеет покрытие с отражательной способностью, меньшей или равной 0,5% при угле падения 10,7 +/-0,5o относительно нормали для внутренне падающего света. Поверхность S16 5-352 предпочтительно имеет тонкопленочное покрытие с Rs>90%, Rp=12,5% +/-2,5% при угле падения 39o 39' +/-0,5o относительно нормали. Предпочтительно тонкопленочное покрытие имеет фазовый сдвиг меньше 8o для всех рабочих условий и оптических параметров.
Для конфигурации, показанной на фиг.74, угловое отклонение между входным и выходным пучками предпочтительно равно 90o. Это облегчает изготовление, так как монтаж компонентов для отклонений 90o реализовать проще, чем для отклонений 87o, как в устройстве по фиг.69. Для размеров и покрытий в устройстве по фиг.73 призма не является идеально ахроматической, однако, она по существу является ахроматической в приемлемом диапазоне рабочих длин волн относительно расчетной длины волны.
Результаты математического моделирования характеристик призменной системы 5-339 по фиг.73 для изменений длины волны от 780' до 785 нм приведены в табл.Б. Вновь угол Phi равен 35o 26'.
Можно видеть, что устройство по фиг.73 не является ахроматическим, как устройство по фиг.69. Для сдвига длины волны от 780 до 783 нм, однако, боковое смещение сфокусированного пятна от пучка света, выходящего из призмы, равно всего лишь 19,6 нм. Вновь это контрастирует с боковым смещением порядка 200 нм для сдвига длины волны 3 нм в устройстве, подобном описанному выше, но без хроматической коррекции.
Поиск данных - обнаружение перехода
Детальное описание системы запоминания и извлечения данных в магнитооптическом устройстве представлено в родственной заявке cep. 07/964518 от 25 января 1993, приведенной здесь для ссылки.
Блок-схема примера магнитооптической системы представлена на фиг.75. Система может иметь режим считывания и режим записи. В режиме записи источник данных 6-10 передает данные на кодер 6-12. Кодер 6-12 преобразует данные в двоичные кодовые биты, которые передаются на импульсный генератор 6-14 лазера, где кодовые биты могут преобразовываться в возбуждающие импульсы для запуска и выключения лазера 6-16. В одном примере кодовый бит "1" может индицировать импульсный запуск лазера на фиксированную длительность, независимо от комбинации кодовых бит, а кодовый бит "0" - отсутствие импульсного запуска лазера на этом интервале. В зависимости от конкретного лазера и типа оптического носителя, эффективность может быть повышена за счет регулировки относительных моментов появления лазерного импульса или растяжения или иного выравнивания длительности импульсов. В ответ на импульсный запуск лазер 6-16 нагревает локализованные области на носителе 6-18, тем самым экспонируя эти области оптического носителя 6-18 относительно магнитного потока, который фиксирует полярность магнитного материала на оптическом носителе 6-18. В локальных областях, обычно называемых "питами", осуществляется запоминание закодированных данных в форме намагничивания до тех пор, пока они не будут стерты.
В режиме считывания луч лазера или иного источника света отражается от поверхности оптического носителя 6-18. Отраженный лазерный луч имеет поляризацию, зависящую от полярности намагниченной поверхности оптического носителя 6-18. Отраженный лазерный пучок подается на оптическое считывающее устройство 6-20, которое передает входной сигнал или сигнал считывания на процессор сигналов 6-22 для преобразования формы входного сигнала и восстановления закодированных данных. Выходной сигнал процессора сигналов 6-22 может быть подан на декодер 6-24. Декодер преобразует кодированные данные в исходную форму и передает декодированные данные на порт выходных данных 6-26 для передачи или иной обработки при необходимости.
На фиг.76 представлена более детально процедура запоминания и извлечения данных с использованием формата GCR 8/9-кода. Для GCR 8/9-кода элемент 6-28 (фиг. 76А) определяется как один канальный бит. Каждый тактовый период 6-42 соответствует канальному биту; таким образом, элементы 6-30 - 6-41 соответствуют каждый одному тактовому периоду 6-42 тактового сигнала 6-45. Например, для 3 1/2" оптического диска, вращающегося со скоростью 2400 оборотов в минуту, при емкости памяти 256 Мбайт тактовый период 6-42 в типовом случае составит 63 нс или тактовая частота равна 15,879 МГц. Выходной сигнал GCR-кода 6-47 закодирован выходными данными с кодера 6-12 (фиг.75). Входной GCR-сигнал 6-47 соответствует характерной канальной последовательности "010001110101". Импульсный генератор 6-14 лазера использует GCR-сигнал 6-47 для получения импульсного GCR-сигнала 6-65 (который на фиг.76 не подстроен по времени или длительности для улучшения характеристик для конкретной комбинации данных). В общем случае GCR-импульсы 6-67 - 6-78 возникают с тактовыми интервалами, если GСR-сигнал данных 6-47 имеет высокий уровень. Импульсный GСR-сигнал 6-65 подается на лазер 6-16. Намагничивание ранее стертого оптического носителя реверсирует полярность в присутствии внешнего магнитного поля противоположной полярности по отношению к стертому носителю и при импульсном запуске лазера с энергией, достаточной для превышения температуры Кюри на носителе. Лазерные импульсы, полученные с использованием GCR-импульсов 6-68, 6-69, 6-70 и т.д., создают комбинацию записанных бит 6-80 на оптическом носителе 6-18. Таким образом записанные биты 6-82 - 6-88 соответствуют импульсам 6-68, 6-69, 6-70, 6-71, 6-73, 6-76 и 6-77.
Последовательно записанные питы 6-82 - 6-85 могут сливаться вместе, эффективно создавая удлиненный пит. Удлиненный пит имеет передний фронт, соответствующий переднему фронту первого записанного пита 6-82, и задний фронт, соответствующий заднему фронту последнего записанного пита 6-85.
Считывание записанных питов с помощью оптического устройства, такого как лазер, приводит к генерированию сигнала воспроизведения 6-90. Сигнал воспроизведения 6-90 имеет низкий уровень в отсутствие записанных бит. В момент переднего фронта пита 6-86 сигнал воспроизведения 6-90 будет нарастать и оставаться на высоком уровне до момента заднего Фронта пита 6-86, в этот момент сигнал воспроизведения 6-90 будет спадать и оставаться на низком уровне до следующего пита 6-87.
Вышеописанную процедуру можно определить как широтно-импульсную модуляцию, так как длительность импульсов в сигнале воспроизведения 6-90 индицирует расстояние между единичными битами. Таким образом, края записанных питов 6-80, которые определяют длину импульсов сигнала воспроизведения 6-90, содержат достоверную информацию о данных. Если сигнал воспроизведения 6-90 продифференцировать, пики сигнала первой производной будут соответствовать краям записанных питов 6-80. Пики сигнала первой производной сигнала воспроизведения будут лишь незначительно смещены от краев записанных питов 6-80, так как сигнал воспроизведения 6-90 показан как идеальный сигнал воспроизведения. Для восстановления информации, соответствующей краям питов, из сигнала первой производной, необходимо продетектировать его пики. Этот процесс детально рассматривается ниже.
В противоположность этому, большинство существующих систем с RLL 2,7-кодом используются во взаимосвязи с модуляцией импульсов по положению. В системах с модуляцией импульсов по положению каждый пит представляет "1", а отсутствие пита представляет "0". Расстояние между питами представляет расстояние между единичными битами. Центр каждого пита соответствует местоположению элемента данных. Для нахождения центра пита сигнал воспроизведения дифференцируется и обнаруживаются пересечения нуля первой производной. Такой метод может быть противопоставлен системам с широтно-импульсной модуляцией, описанным выше, в которых пики сигналов первой производной содержат информацию в ширине импульсов.
Тем не менее возможно использовать широтно-импульсную модуляцию вместо модуляции по положению импульсов в RLL- системе, такой как система с RLL 2,7-кодом. Каждый канальный бит может соответствовать тактовому периоду тактового сигнала. Как в GCR-системе, описанной ранее с использованием широтно-импульсной модуляции, "1" может быть представлена переходами во входном сигнале. Таким образом, входной сигнал RLL 2,7 может оставаться в том же самом состоянии, пока не появится "0", и изменяет состояние с высокого на низкое или с низкого на высокое при возникновении "1".
Как в случае RLL-кода, так и в случае GCR-кода и других кодов, при считывании комбинаций данных входной сигнал, генерируемый оптическим считывающим устройством 6-20, часто несимметричен. Когда несимметричный сигнал передается между цепями с развязкой по переменному току, среднее значение постоянной составляющей смещается от средней точки между пиками. Такой непреднамеренный сдвиг от средней точки может привести к смещению видимого положения данных, отрицательно повлиять на возможность точного определения положений данных и уменьшить запас по времени или сделать записанные данные невосстанавливаемыми. Это явление может быть объяснено со ссылками на фиг. 77А, 77В, на которых представлен идеальный входной сигнал S1, полученный из симметричной комбинации данных. Обычно переходы между "1" и "0" в данных детектируются в средней точке между верхним и нижним пиками входного сигнала. На фиг.77А можно видеть, что области А1 и А2 выше и ниже средней точки Мр1 между пиками входного сигнала S1 равны, и переходы между "1" и "0" точно соответствуют (в идеальной системе) пересечениям входного сигнала S1 со средней точкой Мр1 между пиками.
На фиг. 77В, в противоположность этому, показан входной сигнал S2, полученный из несимметричной комбинации данных. Можно видеть, что область А1' выше средней точки Мр2 между пиками больше, чем область А2' в нижней части графика. Входной сигнал S2 поэтому имеет постоянную составляющую, которая смещает базовый уровень постоянной составляющей DCbase выше средней точки Мр2 между пиками. Если стремятся определить переходы между "1" и "0" путем определения пересечений нуля развязанного по переменному току входного сигнала S2, то могут иметь место ошибки вследствие того, что уровень постоянной составляющей не идентичен средней точке Мр2 между пиками. Уровень постоянной составляющей не остается постоянным, а нарастает и спадает в зависимости от свойств входного сигнала. Чем значительнее нарастание постоянной составляющей, тем больше продетектированные переходы будут отличаться от истинных переходов. Таким образом, нарастание постоянной составляющей может обусловить сокращение запасов по времени или невозможность восстановления данных.
На фиг.78 представлена блок-схема канала считывания 6-200 в соответствии с одним из вариантов осуществления изобретения, обеспечивающим снижение влияния нарастания постоянной составляющей. Канал считывания 6-200 в общих чертах соответствует процессору 6-22 на фиг. 75.
Канал считывания 6-200 включает каскад предварительного усиления 6-202, канал дифференцирования 6-204, канал выравнивания (коррекции) 6-206, канал парциального интегрирования 6-208 и канал генерирования данных 6-210. Работа канала считывания будет пояснена со ссылками на более детальную блок-схему, показанную на фиг.79, формы сигналов по фиг.84А-84D и другие.
Когда оптический носитель 6-18 сканируется для считывания данных, каскад предварительного усиления 6-202 усиливает входной сигнал до соответствующего уровня. Каскад предварительного усиления 6-202 может включать предварительный усилитель 6-203, хорошо известный из уровня техники. Предварительный усилитель 6-203 может быть расположен и в ином месте в оптическом устройстве считывания 6-20. Пример усиленного сигнала воспроизведения 6-220 показан на фиг.84А.
Выходной сигнал каскада предварительного усиления 6-202, как показано на фиг. 79А, поступает на каскад дифференцирования 6-204. Каскад дифференцирования 6-204 может включать дифференциальный усилитель 6-212, например дифференциальный видеоусилитель с конденсатором 6-213, как известно из уровня техники. Характерный частотный отклик каскада дифференцирования 6-204 представлен на фиг.80А. Каскад дифференцирования эффективно увеличивает относительные величины высокочастотных компонент усиленного сигнала воспроизведения 6-202. Пример сигнала на выходе каскада дифференцирования 6-204 представлен на фиг.84В.
За каскадом дифференцирования 6-204 следует каскад коррекции (эквалайзер, выравниватель) 6-206, как показано на фиг.79А. Каскад коррекции 6-206 обеспечивает дополнительную фильтрацию, чтобы модифицировать общую передаточную функцию канала и обеспечить более надежное детектирование данных. Каскад коррекции 6-206 преобразует форму продифференцированного входного сигнала, так чтобы выровнять амплитуды высокочастотных и низкочастотных компонентов и генерировать сглаженный сигнал для дальнейшей обработки. Выравнивающие фильтры часто модифицируют шумовой спектр, как и сигнал. Поэтому улучшение в форме продифференцированного входного сигнала (т.е. снижение искажений) обычно сопровождается ухудшением отношения сигнал/шум. Следовательно, проектирование каскада коррекции 6-206 определяется компромиссом между стремлением минимизировать шумы и обеспечить сигнал без искажений при приемлемых затратах на аппаратные средства. В общем случае конструкция эквалайзера зависит от величины межсимвольных помех, которая должна быть скомпенсирована, кода модуляции, способа восстановления данных, отношения сигнал/шум с формы шумового спектра. Значительная часть линейных межсимвольных помех при считывании данных в магнитооптической системе записи обусловлено ограниченной шириной полосы канала аналогового считывания и спаданием амплитуды входного сигнала при повышении плотности записи. Соответственно каскад коррекции 6-206 может содержать один или более линейных фильтров, которые модифицируют передаточную функцию канала считывания для обеспечения более надежного обнаружения данных. Обычно каскад коррекции выполняется как часть канала считывания, но при некоторых условиях корректирующая фильтрация частично может быть осуществлена в канале записи.
Сигнал воспроизведения может рассматриваться как последовательность биполярных прямоугольных импульсов единичной амплитуды с длительностью Т. Сигнал воспроизведения может представлять собой последовательность двунаправленных ступенчатых функций в каждой точке перемагничивания, причем амплитуда ступеньки согласована с амплитудой импульса. Когда входной сигнал прикладывается к каскаду коррекции 6-206, тактовая информация и полярность импульсов каждого тактового элемента могут быть определены из выходного сигнала каскада коррекции 6-206. Информация о тактовом сигнале полярности теоретически может быть получена использованием эквалайзера восстановления идеального сигнала, который формирует выходной сигнал, средняя точка и границы тактового элемента которого аналогичны соответствующим характеристикам входного сигнала.
Пересечения нуля выходного сигнала происходят на границах тактовых элементов для точного восстановления тактового сигнала. Если моменты времени и направления пересечения нуля известны, то из сигналов пересечений нуля можно восстановить как тактовый сигнал, так и сигнал данных.
В одном варианте каскад корректировки 6-206 содержит эквалайзер, выбранный из класса эквалайзеров восстановления формы сигнала. В общем случае эквалайзер восстановления формы сигнала генерирует сигнал, содержащий двоичную последовательность, восстанавливающую форму входного сигнала или сигнала воспроизведения. Углы обычно прямоугольных импульсов результирующего сигнала скруглены, так как гармоники сигнала ослаблены в канале. Результирующий сигнал может также проявлять некоторые амплитудные вариации.
Эквалайзер, который формирует выходной сигнал с минимальной шириной полосы, является идеальным фильтром нижних частот (ФНЧ) с единичным откликом на минимальную частоту отсечки и с отсутствием отклика на высокие частоты. Хотя такой идеальный ФНЧ физически не реализуем, теорема Найквиста для остаточной симметрии предполагает, что узкополосный фильтр с минимальной шириной полосы может быть модифицирован и сохранять пересечения нуля в выходных импульсах в моментах времени, соответствующих серединам тактовых элементов. Для достижения этого результата спадание по высокой частоте амплитудной характеристики скорректированного канала предпочтительно симметрично и локализует точку половинной амплитуды на частоте отсечки фильтра с минимальной шириной полосы.
Одной из характеристик спада является характеристика фильтра в каскаде коррекции 6-206 вида приподнятого косинуса, которая привела к соответствующему определению эквалайзера как эквалайзера приподнятого косинуса. Передаточная характеристика спада вида приподнятого косинуса приближенно реализуема и имеет улучшенный отклик для фильтра минимальной ширины полосы. Выходные импульсы имеют нулевое значение в моменты nТ, а амплитуда затухающих колебаний боковых лепестков уменьшена. Пересечения нуля выходного сигнала фильтра приподнятого косинуса более точные, чем в случае фильтра с минимальной шириной полосы, а линейные фазовые характеристики проще достижимы при постепенном спаде, таком как в случае постепенного спада фильтра с характеристикой типа приподнятого косинуса. Эти преимущества, однако, в типовом случае достигаются ценой увеличения ширины полосы. Отношение расширения полосы к минимальной ширине полосы fm иногда определяют как параметр α канала с характеристикой типа приподнятого косинуса. Так, в случае кода модуляции с d= 0, α = 0 соответствует минимальной ширине полосы, но представляет нереализуемую прямоугольную передаточную функцию, в то время как α = 1 представляет фильтр с удвоенной минимальной шириной полосы.
Импульсная передаточная функция канала коррекции типа приподнятого косинуса (включая аналоговый канал и эквалайзер, но исключая входной фильтр) может быть определена следующим образом:
H(f)=1, for 0<f<(1-α)•fm
H(f) = 1/2{1+cos[(f-(1-α)•fm)/(2•α•fm)]},
for(1-α)•fm<f<(1+α)•fm
H(f)=0, forf>(1+α)•fm
где Ф(f)= k•f представляет фазу, а k - постоянную. Приведенные выше уравнения определяют α -эквалайзеры восстановления формы сигнала. Канал α = 1 обладает свойством наличия нулей на интервалах половины тактовых элементов, а также на интервалах полных тактовых элементов. Такой канал позволяет сформировать сигнал, не имеющий межсимвольных помех в моменты середины или границ тактовых элементов, которые представляют моменты пересечений нуля и выборок, что позволяет точно восстановить тактовые и информационные сигналы. Для такого эквалайзера полной ширины полосы спадание начинается на нулевой частоте и продолжается до частоты отсечки fc.
Эквалайзеры приподнятого косинуса способны корректировать в значительной степени линейные межсимвольные помехи при адекватном отношении сигнал/шум. Значительный подъем частотной характеристики в области высоких частот может потребоваться для компенсации разрешения для магнитооптических носителей и оптических систем. Ширина полосы эквалайзера, равная по меньшей мере удвоенной минимальной ширине полосы, предпочтительна для исключения линейной межсимвольной помехи, в предположении физически реализуемого канала, работающего с кодом модуляции при d=0. Такая ширина полосы в общем случае приводит к уменьшению отношения сигнал/шум. Ширина полосы эквалайзера выбрана так, чтобы достичь оптимального компромисса между искажениями, обусловленными помехой, и шумом. В некоторых случаях может оказаться желательным сузить полосу за счет использования передаточной функции при α<0 для улучшения шумовой характеристики ценой дополнительных искажений в форме дрожания синхросигнала.
Другим известным эквалайзером восстановления формы сигнала является эквалайзер с косинус β -откликом. Импульсная передаточная функция β -канала полной ширины полосы определяется следующим образом:
H(f)-cosβ(π•f/(2•fc))for0<f<fc
H(f)=0, forf>fc
Подобно семейству α -эквалайзеров, имеется множество β -эквалайзеров. β -эквалайзеры полной ширины полосы имеют частоту отсечки fc и, следовательно, снижают дрожание синхросигнала вследствие относительно низкой помехи на границах тактовых элементов. Известны способы оптимизации этих типов корректирующих фильтров для достижения минимальной вероятности ошибки при различных типах шумов.
Использование α -эквалайзеров в общем случае приводит к сужению ширины полосы и уменьшению шумов ценой дрожания синхросигнала или горизонтального раскрытия глазковой диаграммы (индикации) эквалайзера. Использование β -эквалайзера в общем случае приводит к улучшению отношения сигнал/шум за счет снижения высокочастотного подъема характеристики без уменьшения ширины полосы. Выбор β -эквалайзера может уменьшить вертикальное раскрытие глазковой диаграммы эквалайзера или существенно уменьшить амплитуду. Каналы эквалайзеров типа α = 1 и β = 2 идентичны с точки зрения глазковой диаграммы, при этом оба типа каналов имеют относительно широкое раскрытие глазковой индикаторной диаграммы.
Предпочтительная ширина полосы канала эквалайзера для кодов с d>0 не обязательно зависит от минимальной длительности записываемых импульсов Тr, как можно ожидать, а, напротив, зависит от длительности тактового элемента Тm. Это объясняется тем, что схемы восстановления данных в общем случае должны различать импульсы, отличающиеся длительностью одного тактового элемента, а разрешение по времени является функцией ширины полосы сигнала. Коды вида (0, k), где k представляет максимальное число непрерывно следующих элементов без перемагничивания, требуют номинальной ширины полосы BWnom=1/Tm=fc, чтобы исключить помехи в центре и на краях каждого тактового элемента, при условии, что межсимвольные помехи на границах тактовых элементов отсутствуют.
Для кодов с d>0 помехи могут быть эффективно устранены на краях тактовых элементов при уменьшенной полосе BW=1/(2.Tm)=fc/2. В этом случае импульсы считывания всех тактовых элементов имеют единичную амплитуду при перемагничивании, и задние фронты импульсов считывания пересекают нуль при переходах магнитного потока. Более узкая ширина полосы BW приводит к пересечениям нуля выходным сигналом в точке, где отсутствуют помехи, без учета центров тактовых элементов, но уменьшение ширины полосы обычно получают при увеличении неоднозначности детектирования в присутствии канальных искажений. Более узкая ширина полосы BW может также приводить к уменьшению наклона сигнала пересечений нуля, что приводит к потенциальному увеличению восприимчивости детектирования к шумам, изменениям скорости диска, неидентичностям аналоговых каналов или к ненадлежащей частотной коррекции. Например, канал коррекции с половинной шириной полосы, β = 2, при коде модуляции с частотой (1, k)2/3 может привести к сигналу, не имеющему межсимвольных помех для пересечений нуля, но с некоторыми амплитудными колебаниями между пересечениями нуля. Ширина полосы меньше, чем ширина полосы для модуляции "без возврата к нулю", хотя в этом случае записывается больше информации, чем при модуляции "без возврата к нулю" (например, ширина полосы 0,75 и частота следования бит равна 1,33 по отношению к модуляции "без возврата к нулю"). Эта уменьшенная ширина полосы возмещает потери частоты кода модуляции.
Эквалайзеры восстановления формы сигнала типа α = 1 и β могут обеспечить появление пересечений нуля в моменты, эквивалентные фронтам входных импульсов. Детектирование данных в таком случае может быть обеспечено за счет жесткого ограничения скорректированного сигнала, что приводит в общем случае к выходному сигналу, воссоздающему исходный сигнал воспроизведения. Однако этот результат может быть получен, только если отклик эквалайзера доходит до постоянной составляющей, что обычно не имеет места для магнитооптического канала. Двойное лучепреломление для диска в магнитооптическом канале вызывает дрейф вверх и вниз относительно опорного уровня постоянной составляющей, что приводит к удлинению или укорочению выходных тактовых элементов соответственно степени амплитудного смещения в детекторе пересечений нуля. Эту проблему можно уменьшить при использовании восстановления постоянной составляющей, как описано здесь. Для достижения требуемого низкочастотного отклика для эквалайзера восстановления формы сигнала, низкочастотные сигналы могут потребовать существенного усиления, что может серьезно ухудшить отношение сигнал/шум при некоторых условиях. Если низкочастотный шум имеет значительный уровень, то методы коррекции при восстановлении формы сигнала могут оказаться не вполне удовлетворительными, если только не используется код модуляции без постоянной составляющей или с малым ее содержанием или схемы восстановления постоянной составляющей.
В предпочтительном варианте каскад коррекции 6-206 может содержать программируемый фильтр и эквалайзер 6-207 (фиг.79А), расположенные на микросхеме. Такие микросхемы изготавливаются в настоящее время многими компаниями-производителями. Фильтр и эквалайзер 6-207 могут характеризоваться равномерными пульсациями и иметь относительно постоянную групповую задержку вплоть до частоты, равной примерно удвоенной частоте отсечки. Характерный частотный отклик каскада коррекции 6-206 представлен на фиг.80В, а пример выходного сигнала представлен на фиг.84С.
После того как сигнал обработан каскадом коррекции 6-206, сигнальные пики, как показано на фиг.84С, содержат точную информацию о положении считываемых данных. Сигнальные пики могут затем детектироваться путем взятия второй производной, но это может ухудшить отношение сигнал/шум системы и вызвать нежелательное дрожание сигнала. Предпочтительный пример осуществления изобретения, описанный здесь, предоставляет точное средство детектирования пиков сигнала без взятия второй производной, за счет использования парциального интегрирования и новой схемы генерирования данных.
После того как сигнал был обработан каскадом коррекции 6-206, он подается на каскад парциального интегратора 6-208 для дальнейшего преобразования формы сигнала. Как показано на фиг.79А, каскад парциального интегратора 6-208 может содержать усилительный каскад 6-229, каскад полосового фильтра 6-230, каскад интегратора и ФНЧ 6-232 и каскад вычитателя и ФНЧ 6-234. Усилительный каскад 6-229 получает выходной сигнал каскада коррекции 6-206 и передает сигнал на каскад полосового фильтра 6-230 и каскад интегратора и ФНЧ 6-232. Каскад 6-232 предпочтительно ослабляет выбранный диапазон высокочастотных компонентов. Характерный частотный отклик 6-260 каскада интегратора и ФНЧ 6-232 и характерный частотный отклик 6-261 каскада полосового фильтра 6-230 показаны на фиг.80С.
Выходной сигнал каскада полосового фильтра 6-230 (фиг.79А) затем вычитается из выходного сигнала каскада интегратора и ФНЧ 6-232 и фильтруется каскадом ФНЧ 6-234. График полного частотного отклика каскада парциального интегратора 6-208, включающего ФНЧ 6-234, показан на фиг.80D. Пример выходного сигнала каскада парциального интегратора 6-208 показан на фиг.84D.
Детальная схема примера выполнения каскада парциального интегратора 6-208 показана на фиг.79В. Как показано, дифференциальный входной сигнал 6-238, 6-239 поступает от каскада коррекции 6-206. Этот сигнал подается на дифференциальный усилитель 6-240, дифференциально суммирующий входные сигналы. Дифференциальный усилитель 6-240 соответствует усилительному каскаду 6-229 на фиг.79А.
Выход 6-249 дифференциального усилителя 6-240 соединен с генераторами тока 6-241 и 6-242. Первый генератор тока 6-241 содержит резистор R77 и PNP-транзистор Q61 (фиг. 79В). Второй генератор тока 6-242 также содержит резистор R78 и PNP-транзистор Q11.
Выход генератора тока 6-241 соединен с полосовым фильтром 6-243, который содержит индуктивность L3, конденсатор С72 и резистор R10, соединенные параллельно. Полосовой фильтр 6-243 по существу соответствует каскаду полосового фильтра 6-230 по фиг.79А. Выход генератора тока 6-242 соединен с интегратором 6-244. Интегратор 6-244 содержит конденсатор С81 и резистор R66, соединенные параллельно, как показано на фиг.79В.
Выход интегратора 6-244 соединен через резистор R55 с NPN-транзистором Q31, который выполнен по схеме эмиттерного повторителя, обеспечивая развязку относительно выхода интегратора 6-244 и действуя в качестве источника напряжения. Эмиттер транзистора Q31 соединен с ФНЧ 6-245. ФНЧ 6-245 содержит индуктивность L6, конденсатор С66 и резистор R49. Интегратор 6-244, эмиттерный повторитель на транзисторе Q31 и ФНЧ 6-245 соответствуют каскаду интегратора и ФНЧ по фиг.79А. Частотный отклик интегратора 6-244 соответствует частотному отклику 6-260 (фиг.80С), а частотный отклик ФНЧ 6-243 - частотному отклику 6-261.
Выход ФНЧ 6-245 и выход полосового фильтра (ПФ) 6-243 соединены с дифференциальным усилителем 6-246 (фиг.79В). Дифференциальный усилитель 6-246 дифференциально суммирует входные сигналы и формирует разностный сигнал, подаваемый на ФНЧ 6-247. Дифференциальный усилитель 6-246 и ФНЧ 6-247 соответствуют каскаду вычитателя и ФНЧ 6-234 на фиг.79А.
Формы сигналов в схеме по фиг.79В представлены на фиг.80G(1)-80G(4). На фиг. 80G(1) показан первый входной сигнал 6-256 дифференциального усилителя 6-240, поступающий, например, с выхода эквалайзера 6-206. Сигнал 6-257 на фиг. 80G(2) соответствует выходному сигналу ПФ 6-243 (фиг.79В), формируемому в ответ на первый входной сигнал 6-256. Сигнал 6-258 на фиг.80G(3) соответствует выходному сигналу ФНЧ 6-245, сформированному в ответ на входной сигнал 6-256. Сигнал 6-256 иллюстрирует результат работы интегратора 6-244. Функцией ФНЧ 6-245 является по существу обеспечение задержки для выравнивания выходных сигналов ПФ 6-243 и интегратора 6-244 во времени на входе дифференциального усилителя 6-246. ФНЧ 6-245 при этом согласовывает задержки на каждом входе дифференциального усилителя 6-246 до осуществления дифференциального суммирования.
Сигнал 6-259 на фиг.80G(4) соответствует выходному сигналу второго ФНЧ 6-247 после того, как выходные сигналы ПФ 6-243 и ФНЧ 6-245 были объединены и отфильтрованы. Сигнал 6-259 обнаруживает значительно улучшенное разрешение по сравнению с исходным сигналом воспроизведения, считываемым с магнитного носителя.
Следует отметить, что функции парциального интегрирования, описанные здесь со ссылками на фиг.79А и 79В, выполняются с использованием дифференциальных усилителей (6-240 и 6-246), обеспечивая при этом обычный режим режекции постоянной составляющей входного сигнала 6-238, 6-239. Другая особенность устройств по фиг.79А и 79В состоит в относительно хороших характеристиках частотных откликов, обеспечиваемых каскадом парциального интегрирования. В частности, путем объединения проинтегрированного сигнала с отфильтрованным по высокой частоте сигналом (т.е. в блоке вычитателя и ФНЧ 6-234 или дифференциальном усилителе 6-246) из продифференцированного и скорректированного сигнала воспроизведения удаляются шумы, при сохранении относительно быстродействующего отклика, что обусловлено частично подъемом частотной характеристики в области высоких частот, обеспеченным посредством ПФ.
Основной функцией объединения дифференциального каскада 6-204, каскада коррекции 6-206 и каскада парциального интегрирования 6-208 является преобразование формы сигнала воспроизведения 6-220 определенным образом для облегчения восстановления данных. Сравнивая фиг.84А и 84D, можно видеть, что результирующий сигнал (фиг.84D) подобен сигналу воспроизведения 6-220 (фиг. 84А), из которого он получен, но отличается от него тем, что высокочастотные и низкочастотные компоненты выровнены и исключены шумоподобные характеристики. График полного частотного отклика для комбинации указанных каскадов 6-204, 6-206 и 6-208 представлен на фиг.80Е. График полной групповой задержки для этой же цепочки элементов представлен на фиг.80F.
Следует отметить, что в настоящее время существуют системы дисководов, использующие частотную коррекцию и интегрирование сигнала воспроизведения для облегчения восстановления данных. В большой степени эти системы не испытывают проблем с нарастанием постоянной составляющей, так как они обычно используют коды без постоянной составляющей. Как упомянуто выше, коды без постоянной составляющей имеют тот недостаток, что они обеспечивают относительно низкую плотность записи и поэтому неэффективны. Настоящее изобретение в его различных вариантах позволяет использовать более эффективные системы кодирования за счет использования средств, исключающих влияние эффекта нарастания постоянной составляющей без необходимости использования кодов без постоянной составляющей.
Выходной сигнал каскада парциального интегрирования 6-208 (фиг.84D) подается на каскад генерирования данных 6-210 (фиг.79). Блок-схема каскада генерирования данных 6-210 представлена на фиг.81. Каскад 6-210 содержит детектор положительных пиков 6-300, детектор отрицательных пиков 6-3-2, делитель напряжения 6-304, компаратор 6-306 и схему двойных фронтов 6-308. Работа схемы по фиг.81 может быть описана со ссылками на фиг.83, где предполагается, что записанная последовательность бит 6-230 считана и в конечном счете должен быть генерирован предварительно обработанный сигнал 6-233 с каскада парциального интегрирования 6-208. Следует отметить, что предварительно обработанный сигнал 6-322 и различные другие сигналы, показанные здесь, представлены идеализированными в целях иллюстрации, однако следует иметь в виду, что реальные сигналы могут отличаться по форме и размерам от показанных на фиг.83 и др.
Предварительно обработанный сигнал 6-322 подается на детектор положительных пиков 6-300 и на детектор отрицательных пиков 6-302, которые измеряют и отслеживают указанные пики сигнала 6-322. Выходной сигнал положительных пиков 6-330 с детектора 6-300 и выходной сигнал отрицательных пиков 6-332 с детектора 6-302 показаны на фиг.83. Выходные сигналы положительных и отрицательных пиков 6-330 и 6-332 усредняются делителем напряжения 6-304, состоящим из двух резисторов 6-341 и 6-342. Выходное напряжение делителя 6-304 используется в качестве порогового сигнала 6-334 (фиг.81-83) и характеризует собой среднюю точку между пиками предварительно обработанного сигнала 6-322. Выходной сигнал делителя 6-304 подается на компаратор 6-306, который сравнивает поделенное напряжение с предварительно обработанным сигналом 6-322. Компаратор изменяет состояние, когда предварительно обработанный сигнал 6-322 пересекает пороговый сигнал 6-334, индицируя переход в считанных данных от 1 к 0 или от 0 к 1. Выходной сигнал компаратора 6-362 представлен на фиг. 83. Как объяснено ниже, выходной сигнал 6-362 подается на детектор положительных пиков 6-300 и на детектор отрицательных пиков 6-302 для обеспечения отслеживания огибающей постоянной составляющей. Выходной сигнал компаратора 6-306 также подается на схему двойных фронтов 6-308, которая генерирует униполярный импульс фиксированной длительности при изменении состояния компаратора 6-306.
Выходной сигнал схемы 6-308 содержит тактовую и сигнальную информацию, из которой восстановление записанных данных может быть осуществлено без затруднений. Например, при методе широтно-импульсной модуляции, например при использовании ранее описанного GCR-8/9-кода, каждый импульсный выходной сигнал данных со схемы 6-308 представляет момент перехода в потоке намагничивания (т. е. записанный бит "1"), а отсутствие импульса данных на тактовых интервалах представляет отсутствие такого перехода (т.е. записанный бит "0"). Последовательность записанных бит может затем декодироваться декодером 6-24 (фиг.75) известными способами для определения исходных данных.
Для надлежащего отслеживания огибающей, обусловленной постоянной составляющей предварительно обработанного сигнала 6-322, в предпочтительном варианте предусматривается подача информации о скважности выходного сигнала на пиковые детекторы. Таким образом, выходной сигнал компаратора 6-306 подается на детекторы положительных и отрицательных пиков 6-300, 6-302. Эта обработка поясняется со ссылками на фиг.82, где показана более детальная схема каскада генерирования данных 6-210. Здесь предварительно обработанный сигнал 6-322 подается на базу транзисторов Q2, Q5. Транзистор Q2 относится к детектору положительных пиков 6-300, а транзистор Q5 - к детектору отрицательных пиков 6-302. Так как эти детекторы работают аналогично, то операция с использованием скважности поясняется для детектора положительных пиков 6-300, при этом ясно, что точно также работает и детектор отрицательных пиков 6-302.
Транзистор Q2 заряжает конденсатор С1, когда амплитуда предварительно обработанного сигнала 6=322 превысит накопленное напряжение на конденсаторе С1 (плюс напряжение смещения вперед транзистора Q2). Как показано на фиг.83, выходной сигнал положительных пиков 6-330 быстро заряжается до пикового значения сигнала 6-322. Выходной сигнал 6-362 посредством обратной связи поддерживает положительный заряд конденсатора С1, когда выходной сигнал 6-362 высокого уровня и позволяет конденсатору С1 разряжаться, когда сигнал 6-362 низкого уровня. Таким образом, когда выходной сигнал 6-362 высокого уровня, положительный заряд на конденсаторе С1 поддерживается транзистором Q1 через резистор R2. Предпочтительно, резисторы R1, R2 имеют одинаковое значение, так что заряд, добавляемый к конденсатору через резистор R2, тот же самый, что и разряд через резистор R1, благодаря чему результирующий заряд на конденсаторе С1 сохраняется постоянным. Если выходной сигнал 6-362 низкого уровня, то транзистор Q1 запирается и конденсатор разряжается через резистор R1. Значения конденсатора С1 и резистора R1 выбраны такими, чтобы постоянная времени была несколько меньше, чем ожидаемое время нарастания постоянной составляющей, благодаря чему конденсатор С1 может отслеживать изменения уровня постоянной составляющей.
Выходной сигнал конденсатора С1 подается на базу транзистора Q3. Уровень напряжения эмиттера транзистора Q3 представляет собой уровень напряжения смещения выше выходного сигнала с конденсатора С1. Ток протекает через резистор R3, что позволяет эмиттеру транзистора Q3 отслеживать напряжение конденсатора С1 (смещенное на величину напряжения смещения эмиттер-база). Таким образом, эмиттер транзистора Q3 формирует выходной сигнал положительных пиков 6-330. Следует отметить, что транзисторы Q1, Q2 являются NPN-транзисторами, а транзистор Q3 - PNP-транзистором. Такая конфигурация в значительной степени компенсирует отрицательные температурные эффекты, проявляющиеся для транзисторов Q1, Q2, Q3, а также позволяет компенсировать напряжения смещения, связанные с их работой.
Детектор отрицательных пиков 6-302 работает аналогично детектору положительных пиков 6-300 и поэтому не требует детального рассмотрения. Эмиттер транзистора Q6 вырабатывает выходной сигнал отрицательных пиков 6-332.
Как описано выше, выходной сигнал положительных пиков 6-330 и выходной сигнал отрицательных пиков 6-332 усредняются делителем напряжения 6-304 на резисторах R4 6-341, 6-342, как показано на фиг.81 и 82 для формирования порогового сигнала 6-334. Пороговый сигнал 6-334 соответствует примерно средней точке значения межу пиками предварительно обработанного сигнала 6-332 и отслеживает огибающую постоянной составляющей предварительно обработанного сигнала 6-322 посредством компенсации за счет обратной связи.
Хотя обратная связь с использованием информации о скважности показана с выхода компаратора 6-306, следует иметь в виду, что возможны и другие цепи обратной связи, например, с выхода схемы двойных фронтов 6-308, если триггер или иной элемент памяти размещен на выходе схемы 6-308. Также могут быть использованы другие средства для измерения скважности и подстройки порогового уровня для отслеживания огибающей постоянной составляющей.
Предпочтительный способ, описанный со ссылками на фиг.78 и 79В, включает операцию дифференцирования сигнала воспроизведения до парциального интегрирования, после чего следует операция отслеживания постоянной составляющей. Предпочтительный способ в частности пригоден для систем с сигналом воспроизведения с относительно низким разрешением и может быть эффективно использован, например, при считывании информации, записанной в GCR-формате. В одном из аспектов предпочтительного способа начальная операция дифференцирования снижает низкочастотные компоненты в поступающем сигнале воспроизведения. В другом аспекте предпочтительного способа парциальное интегрирование позволяет восстановить или частично восстановить сигнал воспроизведения при обеспечении быстродействующего отклика, вследствие подъема частотной характеристики в области высоких частот (например, с каскада ПФ). Таким образом, предпочтительный способ отличается от способа, в котором интегрирование сигнала воспроизведения выполняется вначале (т.е. до дифференцирования), что может привести к увеличению постоянной составляющей и вызовет затруднения в отслеживании постоянной составляющей.
Следует отметить, что различные схемы и способы, описанные здесь, не ограничены магнитооптическими системами, но могут быть использованы в системе для считывания данных, запомненных на магнитных лентах или на дисках других типов, а также, в более широком смысле, в любой системе (не обязательно в системе хранения данных) для обработки электрических сигналов, для которых желательно снизить влияние нарастания постоянной составляющей.
Запоминание данных и другие аспекты поиска данных
Согласно фиг. 85, в режиме записи, источник данных 7-10 передает данные на кодер 7-12. Кодер 7-12 преобразует двоичные данные в двоичные кодовые биты. Кодовые биты затем передаются на импульсный генератор 7-14 лазера, где кодовые биты преобразуются в импульсы возбуждения для запуска лазера 7-16 и его выключения. В предпочтительном варианте кодовый бит "1" индицирует импульсный запуск лазера в течение фиксированной длительности независимо от комбинации кодовых бит. В зависимости от лазера и используемого носителя, характеристики могут быть улучшены за счет подстройки моментов возникновения импульсов запуска лазера или за счет растяжения или иного преобразования длительности импульса. Выходной сигнал лазера 7-16 нагревает локализованную область на носителе 7-18, экспонируя ее по отношению к магнитному потоку, который устанавливает определенную полярность магнитного материала оптической среды 7-18. При считывании с оптического носителя 7-18 лазерный луч падает на поверхность носителя. Поляризация отраженного лазерного пучка будет зависеть от полярности намагниченной поверхности оптического носителя.
В режиме считывания отраженный лазерный пучок поступает в оптическое считывающее устройство 7-20, где считанный кодированный выходной сигнал подается на процессор сигналов 7-22. Обработанный считанный код затем поступает в декодер 7-24, откуда выходные данные могут передаваться на выходной порт 7-26 данных для дальнейшей передачи.
Фиг.86 иллюстрирует различия между импульсным запуском лазера при использовании форматов GCR 8/9 и RLL 2,7-кодов. Для GCR 8/9 элемент 7-28 определяется как кодовый бит. Для GCR 8/9 девять элементов или кодовых бит эквивалентны восьми битам данных. Таким образом, каждый из элементов 7-30 - 7-41 соответствует одному тактовому периоду 7-42 тактового сигнала 7-45. Для 3 1/2" оптического диска со скоростью вращения 2400 об/мин при емкости памяти 256 Мбайт тактовый период 7-42 составляет 63 нс или тактовая частота 15,879 МГц. GCR-сигнал данных 7-47 представляет собой кодированный выходной сигнал кодера 7-12. Характерная последовательность данных представлена на фиг.86А. Эта последовательность "010001110101" представлена в GCR-данных 7-50 - 7-61, причем элемент GCR-данных 7-50 имеет низкий уровень, а элемент 7-51 - высокий уровень. Элемент GCR-данных 7-52 имеет высокий уровень и т.д. для всех GCR-данных от 7-53 до 7-61. Импульсный GCR-сигнал 7-65 представляет собой выходной сигнал импульсного генератора 7-14 лазера, подаваемый на лазер 7-16. При реализации изобретения использован возбуждающий сигнал без возврата к нулю для возбуждения головок магнитной записи. Таким образом, намагничивание ранее стертого оптического носителя реверсирует полярность, если в присутствии внешнего магнитного поля с полярностью, противоположной полярности стертого носителя, происходит импульсный запуск лазера с энергией, достаточной для превышения температуры Кюри носителя. Импульсный GCR-сигнал показан без подстройки по времени появления или длительности для улучшения характеристик с учетом используемых комбинаций данных. Импульсный GCR-сигнал 7-67 - 7-78 показывает отсутствие импульса, когда соответствующий элемент GCR-данных 7-47 имеет низкий уровень, и наличие импульса, когда такой элемент 7-47 имеет высокий уровень. Например, импульсный GCR-сигнал не имеет импульса, так как элемент данных 7-50 имеет низкий уровень. И наоборот, импульсный GCR-сигнал 7-68, 7-69, 7-70 и 7-71 иллюстрирует наличие импульса, так как элементы данных 7-51 - 7-54 имеют высокий уровень, и аналогично для импульсного GCR-сигнала 7-72 - 7-78. Для показанного примера длительность 7-65 GCR-импульсов одинакова для GCR-импульсов 7-68, 7-69, 7-70, 7-71, 7-73, 7-76 и 7-77. В предпочтительном варианте эта длительность равна 28 нс. Каждый лазерный импульс, соответствующий GCR-импульсам 7-65, создает питы записи 7-80 на оптическом носителе 7-18, соответствующие импульсам 7-68. Пит 7-83 соответствует GCR-импульсу 7-69. Аналогично, питы 7-84 - 7-88 соответствуют GCR-импульсам от 7-70 до 7-77 соответственно.
Вследствие теплового рассеяния и размера пятна на носителе 7-18, питы записи 7-80 шире по времени, чем GCR-импульс 7-65. Последовательно записываемые питы 7-80 сливаются и создают удлиненный пит записи. Такой удлиненный пит записи имеет передний фронт, соответствующий первому записанному питу, и задний фронт, соответствующий последнему записанному питу. Например, пит, созданный записью питов 7-82 - 7-85, имеет передний фронт от записанного пита 7-82 и задний фронт от пита 7-85. При использовании GCR 8/9-формата передний фронт, соответствующий элементу 7-47, переходит на высокий уровень, а задний фронт, соответствующий элементу 7-47, переходит на низкий уровень. Поэтому для комбинации данных "10001", показанной GCR-данными 7-51 - 7-55, передний фронт возникает для первой "1" (элемент 7-47 переходит на высокий уровень), как показано питом 7-82, а в конце GCR-элемента данных 7-54 задний фронт возникает, как показано питом 7-85, так как элемент 7-55 низкого уровня.
Сигнал воспроизведения 7-90 будет низкого уровня, если запись питов 7-80 соответствует отсутствию пита. В момент переднего фронта пита сигнал воспроизведения 7-90 будет нарастать и сохранять высокий уровень до момента достижения заднего фронта пита. Сигнал будет переходить на низкий уровень и оставаться на нем до следующего пита. Например, сигнал воспроизведения 7-91 имеет низкий уровень, так как элемент данных 7-50 низкого уровня не создал записи пита. В момент переднего фронта записанного пита 7-82 сигнал воспроизведения 7-90 имеет передний фронт, как показано для сигнала воспроизведения 7-92. Сигнал воспроизведения 7-90 будет затем сохраняться неизменным до появления заднего фронта в записанном пите. Например, так как записанные питы 7-83 и 7-84 не имеют заднего фронта, то сигналы воспроизведения 7-93 и 7-94 сохраняют высокий уровень. Сигнал сохраняет высокий уровень в течение сигнала воспроизведения 7-95 ввиду записанного пита 7-85. Однако, так как элемент 7-55 имеет низкий уровень, то записанный пит 7-85 создает задний фронт. Таким образом, сигнал воспроизведения 7-96 спадает. Этот сигнал будет спадать до "0", если не появится пит записи, создающий передний фронт. Таким образом, при появлении пита 7-86, соответствующего элементу данных 7-56, сигнал воспроизведения 7-97 нарастает. Так как отсутствует последующий пит после 7-86, если элемент данных 7-57 низкого уровня, то сигнал воспроизведения спадает. Сигнал воспроизведения 7-99 остается на низком уровне, так как отсутствует записанный пит, когда элемент данных 7-58 низкого уровня. Для GCR-элементов 7-59 и 7-60 высокого уровня записанные питы 7-87 и 7-88 перекрываются, формируя один удлиненный пит. Таким образом, сигнал воспроизведения 7-100 нарастает и сигнал воспроизведения 7-101 остается на высоком уровне. Сигнал воспроизведения 7-102 спадает в момент заднего фронта пита записи 7-88, когда элемент 7-61 имеет низкий уровень.
Для формата RLL 2,7 тактовый элемент состоит из двух битов данных, которые соответствуют двум тактовым периодам 7-121 тактового сигнала 2F 7-120 (фиг. 86В). Для диска на 256 Мбайт RLL 2,7-формат кодирования потребует длительности 7-121 тактового импульса 2F, равной 35,4 нc, или тактовой частоты 28,23 МГц. Расчет этих значений не вызывает затруднений. Для сохранения одной и той же плотности записи на диске форматы кодирования GCR 8/9 и RLL 2,7 должны содержать одно и то же количество информации на интервале одного и того же времени записи. Так как в формате RLL 2,7 требуется два кодовых бита на бит данных, то он требует тактовую частоту в два раза больше, чем для GСR 8/9-формата. В GCR-формате записывается девять бит кодовых бит на восемь бит данных. Таким образом, тактовый сигнал для GCR-данных составляет 9/8 от тактового периода 7-42. Таким образом, для GCR-формата с тактовым периодом 7-42, равным 63 нc, длительность RLL 2,7 импульса 7-121 должна быть 35,4 нc для сохранения той же самой плотности записи на диске.
Сигнал RLL 2,7 данных 7-122 показывает два кодовых бита на тактовый элемент. Например, элемент 7-124 RLL 2,7-данных соответствует комбинации "00", а элемент 7-125 - комбинации данных "10". В этом формате данных "1" представляет переход в данных. Таким образом, элемент 7-125 RLL 2,7-данных переходит на высокий уровень, когда в комбинации данных появляется "1". Аналогично, элемент 7-126 RLL 2,7-данных переходит на низкий уровень, когда в комбинации данных появляется "1". Когда появляется "0", элемент 7-122 RLL 2,7-данных сохраняет то же самое состояние. Импульсный 2,7-сигнал 7-137 соответствует импульсному запуску лазера 7-16 для элемента данных 7-122. Таким образом, для элемента 7-125 и 7-126, в течение периода, когда сигнал имеет высокий уровень, импульсный 2,7-сигнал 7-140 и 7-141 имеет высокий уровень.
Ввиду теплового удлинения пита, импульсный 2,7-сигнал 7-141 перейдет на низкий уровень раньше элемента 7-126 RLL 2,7-данных. Для более длительных комбинаций "0" импульсный запуск будет действовать. Например, в течение комбинации "10001", как показано для элементов 7-128 и 7-129, импульсный 2,7-сигнал 7-143 и 7-144 остается на высоком уровне дольше, чем импульсный 2,7-сигнал 7-140 и 7-141. Для комбинаций данных из последовательных "0" импульсный 2,7-сигнал 7-137 может быть сформирован в виде отдельных импульсов. Например, для комбинации данных "1000001" элементы 7-132, 7-133, 7-134 могут соответствовать двум отдельным импульсам, как показано на примере 2,7-импульсов 7-147, 7-148 и 7-149.
Как в случае GCR 8/9-формата, записанные питы 7-160 проявляют тепловое удлинение. Например, записанный пит 7-162 длиннее во времени, чем импульс, сформированный из импульсного 2,7-сигнала 7-140 и 7-141; аналогичный результат можно видеть для записанного пита 7-163. И вновь, сигнал воспроизведения 7-167, изображенный как сигнал воспроизведения 7-168 - 7-174, переходит на высокий уровень в моменты передних фронтов записанных питов 7-160, спадает в моменты задних фронтов питов 7-160 и сохраняет постоянный уровень в присутствии или в отсутствие питов.
Импульсный GCR-код может быть усовершенствован за счет корректирующих сдвигов прогнозируемого положения. На фиг.87 показана временная диаграмма для компенсации записи импульсного генератора 7-14. Экспериментальная проверка показала, что запись раньше, чем лазер 7-16 отключен для двух бит или более, улучшает характеристики. Тактовый сигнал 7-176 использован для тактирования данных 7-177, 7-203 и 7-229, что иллюстрирует комбинацию данных для наихудшего случая при компенсации.
Другие комбинации могут быть скорректированы, при ухудшении, однако, амплитуды сигнала. Данные 7-180 - 7-184 соответствуют последовательности "10100". Нескомпенсированные импульсные сигналы 7-188 - 7-192 соответствуют этой комбинации данных без компенсации записи. Нескомпенсированные импульсные сигналы 7-189 и 7-191 возникают во второй половине тактового периода. После компенсации записи выходной сигнал импульсного генератора 7-14 лазера соответствует скомпенсированному импульсному сигналу 7-195, где скомпенсированные импульсные сигналы 7-197 и 7-198 остаются неизменными, а укороченный период отключения для скомпенсированного импульсного сигнала 7-199 обеспечивает формирование скомпенсированного импульсного сигнала 7-200. В течение скомпенсированного импульса 7-201 лазер 7-16 остается отключенным на более длительный промежуток времени, чем для нескомпенсированного импульса 7-192. Аналогично, для данных 7-206 - 7-209, соответствующих комбинации "11000", нескомпенсированный импульсный сигнал 7-211 будет отключен для нескомпенсированного импульсного сигнала 7-213, за которым следуют два импульса: нескомпенсированные импульсные сигналы 7-214 и 7-216. И вновь, схема компенсации записи настраивает скомпенсированный импульсный сигнал 7-220 так, что скомпенсированный импульсный сигнал будет появляться ближе во времени к скомпенсированному импульсному сигналу 7-233, так что скомпенсированный импульсный сигнал 7-224 короче, чем нескомпенсированный импульсный сигнал 7-215. И наконец, данные 7-231 - 7-235, соответствующие комбинации данных "00100", имеют нескомпенсированный импульсный сигнал 7-237, появляющийся при нескомпенсированном импульсном сигнале 7-240. Компенсация записи будет смещать скомпенсированный импульсный сигнал 7-243 ближе во времени к скомпенсированному импульсному сигналу 7-246.
На фиг. 88 представлена блок-схема схемы компенсации записи, содержащая блок контроля комбинаций данных 7-248, обнаружитель комбинации компенсации записи 7-249 и схему задержки 7-269. Блок контроля комбинаций данных 7-248 представляет собой последовательный регистр сдвига, который последовательно тактирует кодированные данные с кодера 7-12. Последние пять битов данных передаются на обнаружитель комбинации компенсации записи 7-249, где они анализируются для определения необходимости осуществлять импульсный запуск лазера раньше, чем обычно.
Блок контроля комбинаций 7-248 состоит из последовательности D-триггеров 7-250 - 7-256. Кодированные данные подаются на D-вход D-триггера 7-250 последовательности данных, сигнал WD1 с Q-выхода которого является входным сигналом для D-входа D-триггера 7-251. Это тактирование продолжается для всей последовательности D-триггеров 7-252 - 7-256. Выходной сигнал WD7 с Q-выхода D-триггера 7-256 представляет собой последовательность данных, задержанную на семь тактовых периодов относительно этой последовательности на входе блока контроля комбинаций данных 7-248. Выходные сигналы WD1, WD2, WD3, WD4, WD5 с Q-выходов D-триггеров 7-250 - 7-254 соответственно представляют последние пять из последних семи битов данных, введенных в блок контроля комбинаций данных 7-248. Эти пять бит передаются на обнаружитель комбинаций компенсации записи 7-249, где они сравниваются с определенными комбинациями данных, и, если они согласуются, то сигнал разрешения записи выдается на схему задержки 7-269, индицируя, что данный лазерный импульс должен быть инициирован раньше, чем обычно.
Первая комбинация данных обнаруживается путем инвертирования данных с Q-выхода WD1, WD2, WD4, WD5 D-триггеров 7-250, 7-251, 7-253, 7-254 соответственно посредством инверторов 7-260, 7-261, 7-262, 7-263 соответственно. Выходные сигналы этих инверторов объединяются по схеме И с выходом D-триггера 7-252 в схеме И 264. Таким образом, когда возникает последовательность "00100", выходной сигнал схемы И 7-264 переходит на высокий уровень, индицирующий, что произошло обнаружение данной комбинации. Аналогично, вторая комбинация данных обнаруживается путем инвертирования сигналов с Q-выходов WD1, WD2, WD4 D-триггеров 7-250, 7-251, 7-253 соответственно инверторами 7-282, 7-283 и 7-284 соответственно, и эти инвертированные выходные сигналы объединяются по схеме И с выходными сигналами WD3 и WD5 D-триггеров 7-252 и 7-254 в схеме И 7-286. Таким образом, комбинация "10100" будет обеспечивать переход на высокий уровень на выходе схемы И 7-286, индицируя факт обнаружения. Третья последовательность данных детектируется инвертированием сигналов с Q-выходов WD1 и WD2 D-триггеров 7-250 и 7-251 соответственно, посредством инверторов 7-287 и 7-288 и объединением этих инвертированных выходных сигналов с выходными сигналами WD3, WD4 D-триггеров 7-252 и 7-253 соответственно в схеме И 7-289. Таким образом, комбинация данных "1100" будет формировать сигнал обнаружения на выходе схемы И 7-289, индицируя наличие этой комбинации. Выходные сигналы обнаружения со схем И 7-264, 7-286, 7-289 объединяются по схеме ИЛИ в схеме ИЛИ 7-266, выходной сигнал которой переходит на высокий уровень, когда обнаружена одна из указанных трех комбинаций. Выходной сигнал обнаружения комбинации тактируется в D-триггере разрешения записи 7-268, сигнал Q-выхода которого, являющийся сигналом разрешения записи, передается на блок задержки 7-269.
Схема задержки 7-269 принимает тактированный выходной сигнал WD4 D-триггера 7-253 и одновременно вводит его в схему задержки 7-276 и в схему И 7-274 выбора отсутствия задержки. Задержанный выходной сигнал схемы задержки 7-276 вводится в схему И 7-272 выбора задержки. Сигнал разрешения записи с обнаружителя 7-249 комбинации компенсации будет отпирать либо схему И 7-272 выбора задержки, либо схему И 7-274 выбора отсутствия задержки. Если сигнал разрешения записи имеет низкий уровень, что соответствует отсутствию одной из трех комбинаций данных, то он инвертируется инвертором 7-270. Это позволяет тактировать задержанные данные со схемы задержки 7-276. С другой стороны, если сигнал разрешения записи высокого уровня, что индицирует наличие одной из трех комбинаций данных, то схема И 7-274 выбора отсутствия задержки обеспечивает передачу данных с D-триггера 7-253 без задержки. Выходы схемы И 7-272 и схемы И 7-274 объединяются по схеме ИЛИ в схеме ИЛИ 7-278 и выводятся из блока задержки 7-269. Хотя в предыдущем описании схемы компенсации записи или синхронизации было показано, что для трех комбинаций данных импульс записи должен появляться на 10 нс раньше, в реальном варианте осуществления данные задерживались на 10 нс, данные задерживались на 10 нс для всех комбинаций данных, кроме указанных трех комбинаций. Задержка в схеме задержки 7-276 установлена от 7 до 12 нс для частоты предпочтительного варианта выполнения.
При записи комбинаций данных с более низкой частотой результирующий магнитооптический сигнал имеет время нарастания более длительное, чем время спада. Это обуславливает то, что результирующий выходной сигнал с процессора сигналов 7-22 будет иметь ухудшенную амплитуду положительных пиков, что может быть скорректировано путем записи с более высокой эффективной мощностью для переднего фронта комбинаций данных. В предпочтительном варианте комбинация данных "000111" будет обуславливать запуск сигнала широкой записи в течение второй "единичной" половины комбинации, тем самым осуществляя импульсный запуск лазера в течение его обычного периода выключения.
Как показано на фиг.89, тактовый сигнал 7-301 тактирует сигнал данных 7-303 с помощью импульсного генератора 7-14 лазера в соответствии с комбинацией данных "000111". Как показано данными 7-305 -7-310, импульсный генератор 7-14 лазера генерирует импульсный сигнал 7-312 с импульсами 7-314, 7-315 и 7-316, когда сигнал 7-303 соответствует "1". В течение второй, "единичной", половины этой комбинации данных импульсный генератор 7-14 лазера будет запускаться в соответствии с сигналом увеличенной мощности 7-318 и генерировать импульс 7-320. Выходной импульсный сигнал 7-322 лазера формируется как результат объединения импульса 7-312 и сигнала 7-318 увеличенной мощности, благодаря чему формируются лазерные импульсы 7-323, 7-324 и 7-325. При нормальном режиме лазерный импульс 7-324 должен быть выключен в течение первой половины тактового периода. В случае этой конкретной комбинации данных, однако, поддержание лазера включенным для импульсов 7-323 и 7-324 эффективно увеличивает мощность на 50% в течение этого периода времени.
Согласно фиг. 90, схема коррекции асимметрии амплитуды 7-291 генерирует импульс широкой записи 7-292 (соответствует сигналу увеличенной мощности 7-318 на фиг.89), который объединяется по схеме ИЛИ с лазерным выходным импульсом с блока задержки 7-269 (соответствует импульсному сигналу 7-312 на фиг. 89) в схеме ИЛИ лазера, в результате чего формируется выходной лазерный импульс 7-322. Блок контроля комбинаций данных 7-248 работает, как показано на фиг.88. Выходные сигналы WD2, WD3, WD4, WD5, WD6, WD7 D-триггеров 7-251 - 7-256 соответственно подаются на схему коррекции асимметрии амплитуды 7-291, где сигналы WD5, DW6, WD7 D-триггеров 7-254, 7-255 и 7-256 инвертируются инверторами данных 7-293, 7-294 и 7-295 соответственно. Выходные сигналы инверторов и D-триггеров 7-251, 7-252 и 7-253 объединяются в схеме И 7-296 обнаружения комбинаций данных. Выходной сигнал схемы И 7-296 индицирует обнаружение комбинации "000111", которая тактируется с D-триггера широкой записи на следующий тактовый сигнал 7-301.
Выходной сигнал оптического считывающего устройства 7-20 будет ухудшаться в функции частоты и комбинации данных. Амплитуда и синхронизация могут быть улучшены за счет обработки сигнала процессором 7-22 преобразования формы сигналов. Асимметрия времен нарастания спада отдельного импульса может быть улучшена путем суммирования скорректированного продифференцированного сигнала с его производной. На фиг.91 показано, что магнитооптический сигнал 7-331 дифференцируется дифференциальным усилителем 7-329. Продифференцированный сигнал подается на эквалайзер 7-331, где он корректируется предпочтительно на 5 дБ, а амплитуда выравнивается в функции частоты. Производная скорректированного сигнала берется в процессоре производной 7-333 и суммируется со скорректированным сигналом в сумматоре 7-335. Выход сумматора 7-335 представляет собой сигнал считывания 7-337.
На фиг. 92 представлена временная диаграмма работы схемы динамического порога по фиг.93. Сигнал считывания 7-337 будет содержать выбросы, обусловленные сужением импульсов. Ввиду того, что эти выбросы прогнозируемы, порог для схем считывания может быть увеличен в течение положительных пиков 7-339, 7-340, 7-341 и 7-342 и в течение отрицательных пиков 7-343, 7-344 и 7-345 сигнала считывания 7-337. Пороговый сигнал 7-348 переключается на высокий уровень для положительных пиков 7-339, 7-340 и 7-341 соответственно. Пороговые сигналы 7-352, 7-353 и 7-354 имеют низкий уровень при отрицательных пиках 7-343, 7-344 и 7-345 соответственно. Каждый пик, положительный или отрицательный, сигнала считывания 7-337 генерирует сигнал пика 7-356, представляющий собой короткий тактовый импульс, который возникает сразу же за пиками 7-337 сигнала считывания. Пики 7-339, 7-343, 7-340, 7-344, 7-341, 7-345 и 7-342 сигнала считывания 7-337 формируют сигнальные пики 7-358 - 7-364 соответственно.
Как показано на фиг.93, пороговый сигнал 7-348 подается на D-вход D-триггера 7-366. Сигнальный пик 7-356 тактирует пороговый сигнал 7-348 с помощью триггера 7-366. Задержанный пороговый сигнал 7-368 с Q-выхода триггера 7-366 объединяется по схеме ИСКЛЮЧАЮЩЕЕ ИЛИ с пороговым сигналом 7-348 в схеме 7-370, выходной сигнал которой, EXOR-сигнал 7-372, имеет двойную частоту относительно исходного порогового сигнала 7-348. EXOR-сигнал 7-372 поступает на D-вход триггера 7-374, где он тактируется тактовым сигналом считывания 7-375. Сигнал F1 7-376 представляет собой сигнал на Q-выходе триггера 7-374. Тактовый сигнал считывания 7-375 имеет передний фронт во время высокого уровня импульсов 7-372, за исключением того, когда сигнал 7-372 имеет низкий уровень для более чем одного тактового сигнала считывания 7-375. Таким образом, сигнал F1 7-376 имеет высокий уровень, за исключением интервала времени между первым тактовым сигналом считывания 7-375, после того как EXOR-сигнал 7-372 имеет низкий уровень для более чем одного тактового сигнала считывания 7-375, и следующим импульсом EXOR-сигнала 7-372.
Сигнал F1 7-376 объединяется с сигналом 7-372 в схеме ИЛИ 7-378 огибающей. Выходной сигнал схемы ИЛИ 7-378 имеет высокий уровень за исключением времени от первого тактового сигнала считывания 7-375 после того, как сигнал 7-372 имеет низкий уровень более чем для одного тактового периода, и до тех пор, пока сигнал 7-372 не перейдет вновь на высокий уровень. Выходной сигнал схемы ИЛИ 7-378 тактируется по D-входу триггера 7-379, тактируемого тактовым сигналом считывания 7-375. Сигнал на Q-выходе триггера 7-379 представляет собой сигнал F2 7-381, который имеет высокий уровень, исключая время от второго периода тактового сигнала 7-375 после перехода EXOR-сигнала 7-372 на низкий уровень, до тех пор, пока следующий тактовый сигнал считывания 7-375 не обусловит переход на высокий уровень EXOR-сигнала 7-372. Сигнал F2 7-381 инвертируется инвертором 7-383 и объединяется сигналом 7-372 в схеме ИЛИ - НЕ 7-385 динамического порога для формирования сигнала динамического порога 7-387, который имеет высокий уровень всякий раз, когда сигнал 7-372 низкого уровня, за исключением того, когда сигнал F2 7-381 имеет низкий уровень. Таким образом, сигнал 7-387 динамического порога имеет время включения меньше половины периода тактового сигнала считывания 7-375, за исключением того, когда сигнал 7-372 имеет низкий уровень на следующий период тактового сигнала считывания 7-375. Для этого случая сигнал динамического порога 7-387 остается на высоком уровне от конца сигнала 7-372 до второго импульса тактового сигнала считывания 7-375.
Динамический пороговый сигнал 7-387 используется для смещения вперед или назад диода 7-389. Когда динамический порог 7-387 высокого уровня, смещающий диод 7-389 является обратно смещенным, и наоборот, когда динамический порог 7-387 низкого уровня, диод 7-389 смещен вперед.
Когда динамический пороговый сигнал 7-387 смещает вперед диод 7-389 (т. е. имеет низкий уровень), потенциал отфильтрованного сигнала смещения 7-390 повышен на величину напряжения смещающего диода 7-389. Этот потенциал составляет 0,6 В для стандартных устройств. Напряжение питания 5 В падает на ограничительном резисторе 7-393 до потенциала отфильтрованного сигнала 7-390, так как напряжение на зарядном конденсаторе 7-394 есть разность между отфильтрованным сигналом смещения 7-390 и землей. Зарядный конденсатор 7-394 заряжается до этого потенциала, который также является напряжением базы транзистора 7-395. В результате транзистор 7-395 отпирается, и напряжение на эмиттере транзистора 7-395 становится равным 1,4 В. Так как эмиттеры транзисторов 7-395 и 7-396 соединены, то эмиттерное напряжение транзистора 7-396 меньше, чем базовое напряжение 2,5 В транзистора 7-396. Соответственно транзистор 7-396 запирается, так что коллекторное напряжение на резисторе 7-397 формирует повышенный пороговый сигнал 7-399, равный 0 В (земля). Это увеличенное пороговое напряжение 7-399 представляет собой сигнал, который увеличивает порог детектора сигнала считывания 7-377 в течение интервалов выбросов.
Когда динамический пороговый сигнал 7-397 имеет высокий уровень, смещающий диод 7-389 смещен в обратном направлении, тем самым больше не удерживая базу транзистора 7-395 на уровне 6 В. Когда динамический пороговый сигнал 7-387 переходит на высокий уровень, зарядный конденсатор 7-394 начинает заряжаться, создавая потенциал на базе транзистора 7-395, который будет нарастать экспоненциально до напряжения питания 5 В. Так как отфильтрованный сигнал смещения 7-390 увеличился по напряжению, напряжение на эмиттере транзистора 7-395 увеличивается и одновременно увеличивается напряжение на эмиттере транзистора 7-396. Когда это эмиттерное напряжение превысит напряжение на базе на величину потенциала между эмиттером и базой транзистора 7-396, последний отпирается. Отпирание транзистора 7-396 вызывает увеличение порогового сигнала 7-399 до высокого уровня.
При нормальном режиме работы динамический пороговый сигнал 7-387 формируется, как описано выше. Для нормальных сигналов считывания динамический порог 7-387 включен на период, эквивалентный периоду включения тактового сигнала считывания 7-375. Время заряда для того, чтобы напряжение на зарядном конденсаторе 7-394 превысило напряжение на базе 2,5 В, более длительное, чем этот период времени, равный половине периода тактового сигнала. Таким образом, при нормальных условиях, увеличенный пороговый сигнал остается на низком уровне. Во время интервала выбросов, однако, динамический пороговый сигнал 7-399 включен в течение более длительного времени, тем самым позволяя конденсатору 7-394 зарядиться до напряжения, превышающего 2,5 В, при этом увеличенный пороговый сигнал 7-399 переходит на высокий уровень.
Согласно фиг. 94, главная ЭВМ 7-410, которая служит источником и пользователем цифровых данных, связана электронными средствами интерфейса 7-412 с шиной данных 7-414. Так как главная ЭВМ 7-410 обрабатывает данные и требует доступа к внешней памяти время от времени, то посредством электронных средств интерфейса 7-412 устанавливается связь с шиной данных 7-414. Шина данных 7-414 соединена с входом кодера записи 7-416 и с входом кодера записи 7-418. Предпочтительно кодер записи 7-416 кодирует данные из шины 7-414 в формате низкой плотности записи (т.е. ANSI); а кодер записи 7-418 кодирует данные из шины данных 7-414 в формате высокой плотности записи. Формат ANSI описан, например, в Проекте предложений для кассет перезаписываемых оптических 90 мм-дисков от 1 января 1991. Выходы кодеров записи 7-416 и 7-418 поочередно подсоединяются через переключатель 7-422 к входу записи магнитооптической головки записи/считывания 7-420. Выход считывания головки 7-420 соединяется посредством переключателя 7-424 попеременно к входам декодера считывания 7-426 и декодера считывания 7-428. Декодер считывания 7-426 декодирует данные в том же самом формате, т.е. формате ANSI, что и кодер записи 7-416; а декодер считывания 7-428 декодирует данные в том же формате, что и кодер записи 7-418. Предпочтительно, способы кодирования и декодирования, раскрытые выше, используются для осуществления кодера записи 7-418 и декодера считывания 7-428. Выходы декодеров 7-426 и 7-428 соединены с шиной данных 7-414.
В ответ на сигнал выбора режима электронные средства управления 7-430 переключателем устанавливают положения переключателей 7-422 и 7-424 в соответствии с первым или вторым режимом. В первом режиме кодер записи 7-418 и декодер считывания 7-428 подсоединены между шиной данных 7-414 и головкой записи/считывания 7-420. Во втором режиме кодер записи 7-416 и декодер считывания 7-426 подсоединены между шиной данных 7-414 и головкой записи/считывания 7-420. Головка записи/считывания 7-420 считывает кодированные данные с 90 мм - оптического диска и записывает кодированные данные на диск, введенный с помощью дисковода 7-432, который управляется электронными средствами 7-434 управления дисководом. Головка записи/считывания 7-420 переводится радиально относительно поверхности диска с помощью электронных средств 7-436 управления позиционирования.
Когда 90 мм-диск с высокой плотностью записи вводится посредством дисковода 7-432, сигнал выбора режима устанавливает систему в первый режим. В результате данные с главной ЭВМ 7-410, которые должны быть записаны на диске, упорядочиваются электронными средствами интерфейса 7-412 и кодируются кодером записи 7-418. Данные, считанные с диска, декодируются декодером считывания 7-428, переупорядочиваются электронными средствами интерфейса 7-412 и передаются на главную ЭВМ 7-410 для обработки.
Когда 90 мм-диск с низкой плотностью записи формата ANSI принимается дисководом 7-432, сигнал выбора режима устанавливает систему во второй режим. В результате данные с главной ЭВМ 7-410, которые должны быть записаны на диске, упорядочиваются электронными средствами интерфейса 7-412 и кодируются кодером записи 7-416. Данные, считанные с диска, декодируются декодером считывания 7-426, переупорядочиваются электронными средствами интерфейса 7-412 и передаются на главную ЭВМ 7-410 для обработки.
Предпочтительно, независимо от формата, использованного для хранения данных, сигнал выбора режима записывается на каждый диск в одном формате, в формате ANSI низкой плотности записи, а система устанавливается по умолчанию в соответствующий режим, т.е. во второй режим. Сигнал выбора режима может быть записан в контрольной зоне дорожки в формате ANSI. Когда диск устанавливается в дисковод 7-432, электронные средства дисковода 7-434 первоначально управляют электронными средствами позиционирования 7-436 для считывания области диска, где записан сигнал выбора режима. Декодер считывания 7-426 воспроизводит сигнал выбора режима, который прикладывается к электронным средствам 7-430 управления переключателем. Если установленный диск использует формат ANSI низкой плотности записи, то система остается во втором
режиме при считывании сигнала выбора режима. Если установленный диск использует формат высокой плотности записи, то система переключается в первый режим, когда считывается сигнал выбора режима.
В некоторых случаях может быть желательно модифицировать лазер для первого и второго режимов. Например, для разных режимов могут быть использованы разные частоты лазера или разные линзы фокусировки. В таком случае сигнал выбора режима также подается на головку записи/считывания 7-420 для контроля перехода между частотами или системами фокусировки линзы. Предпочтительно организовывать запоминаемые данные в обоих форматах так, чтобы они имели одинаковое число байтов на сектор, например в случае ANSI 512 байтов. В таком случае одни и те же электронные средства интерфейса 7-412 могут быть использованы для организации запоминаемых или считываемых с диска данных в обоих форматах.
В соответствии с изобретением одни и те же головка записи/считывания 7-420, электронные средства управления позиционированием 7-436, дисковод 7-432, электронные средства дисковода 7-434, электронные средства интерфейса 7-412 и шина данных 7-414 могут быть использованы для записи и считывания данных с оптических дисков в разных форматах. В результате обеспечивается совместимость форматов высокой плотности записи, усовершенствующих современный уровень техники, с форматом ANSI промышленного стандарта, при использовании одного и того же оборудования.
Со ссылками на фиг.95, 96, 98 будет описан предпочтительный формат высокой плотности записи для оптического диска. Имеется десять тысяч дорожек от 0 до 9999, упорядоченные в 21 зону. Каждая дорожка разделена на множество секторов. В каждой зоне имеется разное число секторов, увеличивающееся к периферии диска. Частота данных, записанных в каждой зоне, также различна и возрастает по мере перемещения к периферии диска (см. фиг.95 и 98 с описанием числа дорожек в каждой зоне, числа секторов в каждой зоне и частоты записи в каждой зоне).
В отличие от дисков с низкой плотностью записи, метки форматирования записаны с возможностью стирания на диске с использованием того же самого способа записи, что и использованный для записи данных, предпочтительно магнитооптического. Такие метки форматирования включают поля секторов, поля заголовка для каждого сектора и дорожки с записью данных управления. В отличие от полей заголовков и данных, поля секторов для всех зон записаны на одной и той же частоте. Описание предпочтительного варианта форматирования сектора изложено ниже.
Форматирование сектора
Сектор содержит метку сектора, заголовок и поля записи, в которых могут быть записаны 512 байтов данных пользователя. Поля записи могут быть пустыми или записанными пользователем. Полная длина сектора составляет 721 байт (один байт эквивалентен девяти канальным битам) заголовка и полей записи с частотой, которая изменяется от зоны к зоне, плюс 80 канальных бит метки сектора с фиксированной частотой, т.е. одной и той же частотой для каждой зоны. Допуска обеспечены в буфере, например в последнем поле сектора. Длина поля заголовка равна 48 байт. Длина поля записи равна 673 байта.
Метка сектора (SM). Метка сектора состоит из комбинации, которая не встречается в данных и предназначена для обеспечения дисководу возможности идентифицировать начало сектора без возвращения к фазоследящей цепи. Метки секторов записаны с фиксированной частотой 11,6 МГц для всех зон. Длина метки сектора равна 80 канальных бит. Следующая диаграмма показывает конкретную комбинацию в формате без возврата к нулю.
1111 1111 1100 0000
1111 1100 0000 0000
0000 1111 1100 0000
1111 1100 0000 1111
1111 1100 1001 0010
VFO поля
Имеется четыре поля, обозначенных VFO1, два VFO2, VFO3, предназначенных для выдачи управляемому напряжением генератору фазоследящей цепи канала считывания сигнала синхронизации по фазе. Информация в полях VFO1 и VFO3 идентична по используемой комбинации и имеет одну и ту же длину 108 бит. Два поля, обозначенных VFO2 каждое, имеют длину 72 бита.
Метка адреса (AM)
Адресная метка состоит из комбинации, не встречающейся в данных. Поле предназначено для выдачи дисководу байтовой синхронизации для последующего поля идентификации (ID). Его длина составляет 9 бит при использовании следующей комбинации: 110000101
ID ПОЛЯ
Три поля ID содержат каждое адрес сектора, т.е. номер дорожки и номер сектора для данного сектора, и байты контроля циклическим избыточным кодом (байты CRC). Каждое поле состоит из пяти байтов при следующем содержании:
1-й байт - байт самого старшего разряда дорожки
2-й байт - байт самого младшего разряда дорожки
3-й байт - бит 7 и 6
00 - ID поле 0
01 - ID поле 1
10 - ID поле 2
11 - не присвоено
бит 5 - нулевой
бит 4 до бит 0 - двоичный номер сектора 4-й и 5-й байты - поле CRC.
Байты CRC содержат информацию о контроле циклическим избыточным кодом, вычисленную по первым трем байтам, согласно уравнениям 1, 2 и 3, представленным в таблице на фиг. 99. Ясно, что 16 контрольных бит из CRC поля ID должны вычисляться по первым трем байтам этого поля. Полином генератора представлен уравнением (1) на фиг.99. Полином разности определен уравнением (2), где bi обозначает бит из первых трех байтов,
а bi - инвертированный бит. Бит с индексом 23 является битом наивысшего порядка первого байта. Содержание 16 проверочных бит ck из CRC определяется уравнением (3) на фиг.99, причем С15 записано для бита наивысшего порядка четвертого байта в поле ID.
Заключение (РА)
Поля заключения равны по длине, оба имеют по 9 бит. Имеется заключение, следующее за ID3, и заключение, следующее за полем данных. Заключение обеспечивает замыкание последнего байта предшествующего CRC или поля данных. Заключения (РА) имеют 9 бит в следующей комбинации: 10 00100 01
Пробелы (GAPs)
GAP1 - это поле с номинальной длиной 9 канальных бит, GAP2 содержит 54 канальных бита. GAP1 должно быть нулевым, а GAP2 не определено. GAP2 есть первое поле поля записи, оно обеспечивает для дисковода некоторый интервал времени для обработки после того, как он закончил считывание заголовка, и прежде, чем начать запись или считывание поля VFO3.
Синхронизация
Поле синхронизации обеспечивает дисководу возможность получать байтовую синхронизацию для последующих полей данных. Оно имеет длину 27 бит и записано в следующей комбинации бит:
101000111 11010001 111000111
Поле данных
Поле данных используется для записи данных пользователя. Оно имеет длину 639 байт (один байт=(канальных бит) и содержит:
512 байтов данных пользователя;
4 байта, содержание которых не определено настоящим стандартом и будет игнорироваться при обмене данными;
4 байта контроля по четности CRC;
80 байтов контроля по четности кода с исправлением ошибок (ЕСС);
39 байтов для ресинхронизации.
Байты данных пользователя
Байты данных пользователя находятся в распоряжении пользователя для записи информации.
Байты CRC и ЕСС
Байты контроля циклическим избыточным кодом (CRC) и кода с исправлением ошибок (ЕСС) используются системой обнаружения ошибок и коррекции для восстановления ошибочных данных. Код ЕСС представляет собой код Рида-Соломона 16 степени.
Байты ресинхронизации
Байты ресинхронизации обеспечивают возможность дисководу повторно осуществить байтовую синхронизацию после значительного дефекта в поле данных. Они имеют длину 9 бит при использовании следующей комбинации
100010001
Их содержание и местоположение в поле данных определяются следующим образом. Поле ресинхронизации введено между байтами А15n и А15n+1, где n больше или равно 1 и меньше или равно 39.
Буферное поле
Буферное поле имеет длину 108 канальных бит.
Байты из 8 бит в трех адресных полях и в поле данных, за исключением байтов ресинхронизации, преобразуются в канальные биты согласно фиг.100А и 100В. Все другие поля в секторе определены выше в элементах канальных бит. Код записи, используемый для записи всех данных в информационных областях на диске, представляет собой Групповой Код (GCR 8/9).
Согласно фиг.97, записанные данные декодируются RLL 2,7 кодером/декодером (кодеком) 7-502 в низкопроизводительном 128-мегабайтном режиме (низкой плотности записи). GCR-кодек 7-504 используется в высокопроизводительном 256-мегабайтном режиме (высокой плотности записи). Генератор импульсов записи 7-506 формирует импульсы длительностью 86 нc с уровнем мощности записи, изменяющимся от 7,0 мВт до 8,5 мВт от внутренних до внешних зон в низкопроизводительном режиме. В высокопроизводительном режиме генератор импульсов записи 7-5-7 снижает длительность импульсов до 28 нc, но мощность записи увеличивается до уровня, изменяющегося от 9,0 мВт до 10,0 мВт от внутренних зон к внешним. Схема выбора 7-509 попеременно соединяет импульсный генератор 7-506 или 7-507 с возбудителем лазерного диода магнитооптической головки записи/считывания, в зависимости от состояния приложенного бита НС контроля высокопроизводительного режима. Контрольный бит НС равен нулю в низкопроизводительном режиме и равен единице в высокопроизводительном режиме. Соответствующий выходной сигнал выбирается для управления возбудителем лазерного диода. Тактовый сигнал записи генерируется частотным синтезатором в разделителе данных 7-508. Частота устанавливается на 11,6 МГц для низкопроизводительного режима и от 10,59 до 15,95 МГц от внутренних к внешним зонам для высокопроизводительного режима.
При воспроизведении предварительный усилитель 7-510, запитываемый фотодиодами в магнитооптической головке записи/считывания, может быть установлен по выбору в суммарный режим (А+В) или в разностный режим (А-В). В случае суммарного режима предварительный усилитель 7-510 считывает изменения отражательной способности, обусловленные предварительно форматированными питами. Эти питы сформированы в RLL 2,7-коде и идентифицируют метку сектора, поля VFO и данные сектора дорожек записи. Имеется 512 байтов данных пользователя, записываемых в каждом предварительно отформатированном секторе. Имеется всего 10000 дорожек, разделенных на 25 сегментов, которые в целом содержат 128 Мбайт данных для низкопроизводительного режима. В высокопроизводительном режиме диск форматируется с использованием GCR-кода. Имеется 40 секторов во внутренней зоне (т.е. в зоне 1), и число зон постепенно увеличивается до 60 секторов во внешней зоне (т.е. в зоне 21). И вновь, 512 байтов данных пользователя записываются в каждом секторе, всего 256 Мбайт данных.
Запись данных в RLL 2,7-режиме также представляет собой запись с формированием питов. Когда эти питы считываются в разностном режиме (А-В), то сигнал, появляющийся на выходе предварительного усилителя, идентичен предварительно отформатированным питам при считывании в суммарном режиме (А+В). Этот сигнал необходимо только продифференцировать усилителем 7-512. Импульс, соответствующий примерно центру каждого пита, генерируется путем преобразования в цифровую форму номинального выходного сигнала (VNOM P, VNOM N) с программируемого фильтра. Частота отсечки фильтра установлена на 5,4 МГц для низкопроизводительного режима, устанавливаемого по результатам проверки бита контроля НС. Отфильтрованный сигнал оцифровывается и пропускается через логическую схему 7-518 режекции импульсных помех. Полученный в результате сигнал, определяемый как HYSTOUT (Hysteresis), подается на разделитель данных 7-508. Сигнал также поступает на контроллер системы для обнаружения меток секторов. По результатам проверки контрольного бита НС делитель параметрона частотного синтезатора в разделителе данных 7-508 устанавливается на 3, а синтезатор устанавливается на 11,6 МГц. Данные синхронизации идентичны исходным данным, закодированным RLL-кодеком 7-502. Они подаются на RLL-кодек 7-502 для декодирования и затем в используемую шину данных.
В высокопроизводительном режиме выбирается разностный режим предварительного усилителя 7-510. Сигнал воспроизведения, появляющийся на выходе предварительного усилителя, представляет собой сигнал без возврата к нулю и требует детектирования обоих фронтов. Это выполняется посредством двойного дифференцирования с помощью дифференцирующего усилителя и дифференциатора в микросхеме 7-514 программируемого фильтра после прохождения сигнала через усилитель с АРУ 7-516. Дифференциатор, отсечка в фильтре высоких частот, эквалайзер на микросхеме 7-514 активизируются контрольным битом НС. Отсечка фильтра настраивается в зависимости от битов идентификации зоны, прикладываемых к микросхеме 7-514. (Дифференциатор и эквалайзер в микросхеме 7-514 не используются в низкопроизводительном режиме). Выходной сигнал (VDIFF P, VDIFF N) с микросхемы 7-514 преобразуется в цифровую форму и очищается от импульсных помех в логической схеме подавления импульсных помех 7-518. Эта схема обеспечивает подавление шумов в сигналах низкого уровня. Пороговый уровень устанавливается управляющим сигналом HYST, прикладываемым к логической схеме подавления импульсных помех 7-518. Выходной сигнал DATA P подается в разделитель данных. По результатам проверки контрольного бита НС делитель параметрона устанавливается на 2, а синтезатор устанавливается на соответствующую частоту, как это определено соответствующими битами номера зоны, поступающими от контроллера системы. Частота отсечки программируемого фильтра также зависит от битов зоны, но только в высокопроизводительном режиме. Синхроданные идентичны исходным данным, закодированным GCR-кодом. Они подаются на GCR-кодек 7-504 для декодирования и затем для передачи в используемую шину данных. В целом функция считывания разделена между низкопроизводительным и высокопроизводительным режимами.
RLL 2,7-кодек 7-502 и генератор импульсов записи 7-506 представлены кодером записи 7-416 и декодером считывания 7-426 на фиг.94. GCR-кодек 7-504 и генератор импульсов записи 7-507 представлены кодером записи 7-418 и декодером считывания 7-428 на фиг.94. Схема выбора 7-509 представлена переключателем 7-422 на фиг.94. Внутреннее средство управления кодеками 7-502 и 7-504, которое попеременно активизирует их в зависимости от проверки контрольного бита НС, представлено переключателем 7-424 на фиг.94. Предварительный усилитель 7-510, усилитель 7-512, усилитель с АРУ 7-516, микросхема 7-514, логическая схема подавления импульсных помех 7-518 и разделитель данных 7-508 используются в обоих режимах, как в низкопроизводительном, так и в высокопроизводительном. Таким образом, они представлены частично как декодером считывания 7-426, так и декодером считывания 7-428.
Средство механической развязки
На фиг.120 и 121 представлены два варианта средства механической развязки 9-10 и 9-12 соответственно, выполненные в соответствии с изобретением. Средства механической развязки 9-10 и 9-12 идеально приспособлены для использования в оптическом дисководе на компакт-дисках, лазерных дисках или в устройствах магнитооптической записи и воспроизведения. Средства механической развязки 9-10 и 9-12 могут быть использованы в любой такой системе. Первое из них - 9-10 представлено на фиг.120, а второе - 9-12 - на фиг.121. Средство механической развязки 9-12 содержит ребра сжатия 9-14. Их функцией является поглощение сил сжатия. Средства 9-10, 9-12 могут быть выполнены с подгонкой к торцам блока 9-16 полюсных наконечников. Тормозящий упор 9-18 предназначен для предотвращения перемещения оптической каретки с ударом о сплошной металл. Колодка 9-20 подогнана под торец полюсного наконечника 9-16 и обеспечивает развязку от вибраций и компенсацию теплового расширения.
Средства механической развязки 9-10 и 9-12 должны быть выполнены из материала, имеющего минимальную ползучесть. Могут быть использованы силиконовый каучук, полиуретан, пластмасса, полученная литьем под давлением. В данном случае использовался материал марки MS40G14H-4RED.
Специалистам в данной области техники должно быть ясно, что средства механической развязки 9-10 и 9-12 представляют собой варианты, пригодные для использования в конкретных системах, и каждое из них в общем случае включает первое средство снижения воздействия нежелательных механических сил на подвижный компонент дисковода и второе средство для поддержания первого средства между упомянутым компонентом и источником нежелательных механических сил, причем этим обеспечивается механическая развязка этого компонента. В каждом из средств развязки 9-10, 9-12 первое средство выполнено как ударопрочный амортизатор или тормозной упор 9-18 и может включать по меньшей мере одно ребро сжатия 9-14. Множество ребер сжатия 9-14, показанные на фиг.121, обеспечивают поглощение сжимающих сил. Второе средство предпочтительно включает корпус, как показано на фиг.120, 121, выполненный так, чтобы соответствовать форме торца блока полюсных наконечников 9-16. Первое средство выполнено из материала, обладающего минимальной ползучестью, предпочтительно выбранного из группы, состоящей из силиконового каучука, полиуретана и пластмассы, полученной литьем под давлением. Первое средство в средствах механической развязки 9-10 и 9-12 обеспечивает поглощение энергии удара и механическую развязку и выполнено в виде тормозящего упора 9-18, препятствующего удару подвижной каретки о твердую поверхность.
Аппаратно реализованное программное обеспечение
Приложение А к настоящему описанию содержит описание шестнадцатеричного кода, используемого в настоящих программных средствах. В следующих разделах содержится детальное функциональное и структурное определение шестнадцатеричного кода, описанного в приложении А. Как описано ниже, программный продукт 80С188 взаимодействует с интерфейсом малых вычислительных систем (SCSI интерфейсом) для получения доступа к главной ЭВМ. Программное обеспечение содержит необходимый код для инициирования и выполнения считывания, записи и поиска через интерфейс с помощью цифрового процессора данных, а также содержит модуль команд дисковода, который взаимодействует непосредственно с множеством из элементов аппаратных средств.
Программное обеспечение включает ядро и модуль SCSI задач контроля, которые получают SCSI команды от главной ЭВМ. Для функций, не требующих доступа к носителям, модуль SCSI задач контроля либо выполняет функции, либо управляет модулем более низкого уровня для выполнения этих функций. Для всех других функций, модуль SCSI контроля направляет запрос о выполнении функции на уровень задач дисковода для их выполнения и ожидает отклика с уровня задач дисковода с индикацией выполнения указанной функции.
Уровень задач дисковода, в свою очередь, управляет различными модулями для выполнения запрошенными функциями. Эти модули включают модуль команд дисковода, модуль прерываний дисковода м модуль форматирования. Эти модули взаимодействуют друг с другом, с модулем устранения неисправностей, с модулем обеспечения функционирования в исключительной ситуации и с цифровым процессором сигналов для выполнения этих функций.
Модуль команд дисковода передает команды цифровому процессору сигналов или собственно элементам аппаратных средств по управлению перемещением элементов аппаратных средств. Модуль форматирования направляет команды модулю команд дисковода форматировать носитель. Любые дефекты в носителе, обнаруженные в этой процедуре, запоминаются в модуле устранения неисправностей, который может быть расположен в ЗУ с произвольной выборкой (ЗУПВ).
Обратная связь от цифрового процессора сигналов и элементов аппаратных средств осуществляется в форме сигналов завершения выполнения команд и прерываний, прошедших в модуль прерываний дисковода. Кроме того, модуль прерываний дисковода обеспечивает регистрацию прерываний другими модулями, так что при возникновении прерывания регистрирующий модуль получает уведомление о прерывании.
Когда прерывание дисковода сигнализирует о неисправности или исключительной ситуации, модуль прерываний вызывает из модуля команд дисковода информацию, относящуюся к статусу носителя и дисковода, и модуль обеспечения функционирования в исключительной ситуации использует эту информацию, пытаясь восстановить исправное состояние. Без пропускания статуса неисправности на уровень задач дисковода и на SCSI интерфейс с главной ЭВМ модуль обеспечения функционирования в исключительной ситуации может передавать команды в модуль команд дисковода или в модуль форматирования, пытаясь восстановить функцию. Модуль прерываний дисковода может осуществлять несколько попыток, прежде чем снять окончательно выполнение функции и предать статус неисправности на уровень задач дисковода. Эта процедура действий в исключительной ситуации может использоваться для любых функций дисковода, например при поиске, выталкивании диска, магнитном смещении и температуре. Кроме передачи статуса неисправности, на уровень задач дисковода передается классификатор кода опознавания, который точно определяет произошедшую неисправность, позволяя интерфейсу SCSI определить эту информацию для главной ЭВМ. Ясно, что модуль обеспечения функционирования в исключительной ситуации может содержаться в модуле прерываний дисковода.
При включении магнитного смещения включается магнит, и создаваемое смещение контролируется посредством последовательного цифроаналогового преобразователя (АЦП). Этот контроль осуществляется до достижения требуемого диапазона или пока не пройдут 5 мс, в последнем случае на уровень задач дисковода передается статус неисправности.
Осуществляется также контроль температуры основной платы. Характеристики носителя могут изменяться при возрастании температуры. При высоких плотностях записи информации луч записи с постоянной интенсивностью может обусловить перекрытие информации, записанной при температурных изменениях и соответствующих изменениях характеристик носителя. Поэтому путем контроля температуры окружающей среды в корпусе программное обеспечение может регулировать мощность записывающего пучка с учетом температурно-чувствительных характеристик носителя или может осуществлять повторную калибровку.
Характеристики записывающего пучка также изменяются с учетом положения на носителе. Носитель разделен на концентрические зоны. Число зон определяется плотностью записи информации на носителе. При удвоенной плотности записи носитель разделен на 16 зон. Для четырехкратной плотности записи носитель разделен на 32 или 34 зоны. Мощность записывающего пучка различается примерно по линейному закону для разных зон.
Кроме того, характеристики записывающего пучка и считывающего пучка изменяются с учетом самого носителя. Различные носители, изготавливаемые разными компаниями-производителями, могут иметь различные оптические характеристики. Когда носитель имеет 'требуемую скорость вращения, с него считывается идентификационный код. Информация об оптических характеристиках, относящихся к носителю, загружается в энергонезависимое ЗУПВ (ЭЗУПВ) при изготовлении диска, и информация, соответствующая конкретному носителю, загружается в цифровой процессор сигналов при считывании идентификационного кода. Если идентификационный код не читаем, мощность считывающего пучка устанавливается на более низкое значение и медленно повышается до тех пор, пока не будет считан идентификационный код.
При контроле и изменении мощности считывающего пучка или записывающего пучка используется множество цифроаналоговых преобразователей (ЦАП). Процедуры контроля и изменения уровня мощности могут использовать один или более ЦАП.
Настоящее изобретение также предусматривает способ изменения скорости вращения носителя от первоначальной скорости вращения до желательной скорости вращения, имеющей нижний и верхний допустимые пределы. Этот способ включает операции приложения силы к носителю для изменения скорости вращения носителя от исходной скорости вращения до первого нижнего предельного значения, устанавливаемого между исходной скоростью вращения и требуемой скоростью вращения, при выполнении приложения силы генерирования первого сигнала, когда скорость вращения носителя превышает первое верхнее предельное значение, и при выполнении операции приложения силы и после генерирования первого сигнала - генерирования второго сигнала, когда скорость вращения носителя превышает нижний допустимый предел, и после этого прекращения приложения силы к носителю. В конкретном варианте осуществления этого способа операция прекращения приложения силы может включать операции установки второго верхнего предельного значения на верхнем допустимом пределе требуемой скорости вращения, установки нижнего предельного значения на нижнем допустимом пределе требуемой скорости вращения и прекращения приложения силы к носителю, когда скорость вращения носителя больше, чем нижнее предельное значение. Верхней допустимый предел требуемой скорости вращения предпочтительно больше, чем нижний допустимый предел требуемой скорости вращения. Кроме того, верхний допустимый предел на полпроцента выше, чем требуемая скорость вращения, а нижний допустимый предел на полпроцента ниже, чем требуемая скорость вращения.
Другой способ, соответствующий настоящему изобретению, включает изменение скорости вращения носителя от исходной скорости вращения до требуемой скорости вращения, имеющей первый допустимый предел и второй допустимый предел. Этот способ включает следующие операции: приложение силы к носителю для изменения скорости вращения носителя от исходной скорости вращения до первого промежуточного предельного значения, установленного между исходной скоростью вращения и требуемой скоростью вращения, при выполнении приложения силы генерирование первого сигнала, когда скорость вращения носителя проходит через первое промежуточное предельное значение, при выполнении приложения силы и после генерирования первого сигнала - генерирование второго сигнала, когда скорость вращения носителя проходит через первый допустимый предел, и после этого прекращение приложения силы к носителю. В конкретном примере осуществления этого способа операция прекращения приложения силы кроме того включает операции установки первого рабочего предела на первом допустимом пределе требуемой скорости вращения, установки второго рабочего предела на втором допустимом пределе требуемой скорости вращения и прекращения приложения силы к носителю, когда скорость вращения носителя находится между рабочими пределами. Разность между первым рабочим пределом и требуемой скоростью вращения предпочтительно равна половине процента от требуемой скорости вращения, а разность между вторым рабочим пределом и требуемой скоростью вращения также предпочтительно равна половине процента требуемой скорости вращения.
Когда электродвигатель шпинделя приводится во вращение из состояния покоя или состояния вращения с меньшей скоростью, то модуль команд дисковода записывает в цифровой процессор сигналов верхнее предельное значение для скорости вращения. Это верхнее предельное значение ниже, чем требуемая скорость. Когда шпиндель достигнет этого верхнего предельного значения, цифровой процессор сигналов генерирует прерывание. В этот момент скорость двигателя шпинделя может быть снижена. Затем модуль команд дисковода записывает другое верхнее предельное значение в цифровой процессор сигналов. Это новое верхнее предельное значение является нижним допустимым пределом для нормальной работы. Когда шпиндель превысит этот новый верхний предел, окончательный верхний предел и нижний предел записываются в цифровой процессор сигналов. Эти окончательные пределы определяют рабочий диапазон скорости шпинделя, который может составлять отклонение порядка 1%.
Алгоритм раскрутки или торможения двигателя шпинделя, хотя раскрыт здесь применительно к магнитооптическому дисководу, в равной мере применим к оптическим дисководам, без каких-либо ограничений, таким, как дисководы с ПЗУ на компакт-дисках, дисководы на компакт-дисках для записи, на мини-дисках, на дисках с однократной записью и многократным считыванием, на видеодисках, на аудио-компакт-дисках. Кроме того, данный алгоритм применим для дисководов на магнитных носителях, как с фиксированными дисками, так и со съемными дисками.
В процессе вращения носитель сначала вращается с самой низкой скоростью для обеспечения нормальной работы дисковода, как описано выше. В этот момент считывается идентификационный код. Если он не читаем, носитель приводится во вращение со следующей по высоте скоростью для нормальной работы, и делается попытка повторного считывания идентификационного кода. Эта процедура повторяется до тех пор, пока идентификационный код либо окажется не считываемым при наивысшей скорости для нормальной работы, в этом случае формируется статус неисправности, либо идентификационный код успешно считывается.
Могут использоваться различные типы носителей в дисководе. Во-первых, среди них могут быть электрически стираемые флэш-ППЗУ, например, на 256 кбайт. Во-вторых, это могут быть статические ЗУПВ, например, на 256 кбайт. И, наконец, это могут быть энергонезависимые ЗУПВ, например на 2 кбайта.
Часть информации, изложенной в последующих разделах, в том числе таких как SCSI программные средства дисковода, исключительные ситуации кэш с упреждающим считыванием и архитектура программных средств дисковода сопровождаются определением "TBD" ("подлежит определению"), что показывает, что конкретная реализация модулей до сих пор не была определена, что некоторые параметры, связанные с оптимизацией среды, но не критичные к функциям или работе, еще не согласованы или что некоторые модули стали ненужными ввиду выполнения других модулей, как представлено в выполняемом коде в Приложении А и как описано в последующих разделах описания. Каждый из объектов со знаком "TBD" связан с определенными условиями проектирования, которые не должны влиять на специалиста в данной области техники при осуществлении настоящего изобретения в том виде, как оно здесь раскрыто. Модули, реализация которых еще не определена, могут быть реализованы следующим образом.
Модуль устранения неисправностей может создавать таблицу неисправностей при форматировании носителя и записывать таблицу неисправностей на часть носителя. Когда предварительно отформатированный носитель вводится в дисковод, модуль устранения неисправностей будет считывать таблицу неисправностей с носителя и загружать ее в память. Модуль устранения неисправностей может затем обращаться в таблицу неисправностей, чтобы обеспечить то, что цифровой процессор сигналов или элементы аппаратных средств не будут пытаться получить доступ к дефектной части носителя. Команды SEEC_COMP_ON и SEEC_ COMP_ OFF соответственно активизируют и деактивизируют алгоритм, который оптимизирует время поиска соответствующей точки на носителе. Команды могут активизировать алгоритм непосредственно, могут устанавливать флаг, индицирующий другому модулю активизацию алгоритма, или могут генерировать прерывание, заставляющее другой модуль активизировать алгоритм. Кроме того, и другие варианты реализации могут быть очевидны для специалиста в данной области техники.
Команды NORMAL_PLL_BWIDTH, HGH_PLL_BWIDTH, VHGH_PLL_BWIDTH могут считывать значения из памяти и запоминать в памяти для считывания на микросхеме.
Калибровка Мощности Записи для 2х и Калибровка Мощности Записи для 4Х может быть осуществлена сходным образом. При изготовлении значения из ЦАП контролируют мощность записи для источника излучающей энергии. Мощность записи может быть измерена для различных значений с ЦАП, и значения опознавания могут быть определены. Эти значения опознавания могут быть запомнены в памяти дисковода. При использовании дисковода значения с ЦАП контролируют мощность записи для источника излучающей энергии и соответствующие значения могут быть измерены. Эти значения опознавания сравниваются с запомненными аналогичными значениями до тех пор, пока они не уравняются в допустимых пределах. Кроме того, согласно этой процедуре, можно калибровать мощность записи в соответствии с температурой, как описано выше. Повторная калибровка выполняется, как описано выше, основываясь на температуре, типе носителя и других факторах. Кроме того, повторная калибровка следящих систем может выполняться путем передачи команд цифровому процессору сигналов установить следящие системы в соответствии с определенными переменными факторами.
Условия изготовления требуют, чтобы информация, описанная выше, которая определяется при изготовлении дисковода, записывалась и хранилась в памяти дисковода.
Вводимая с передней панели функция Запрос Выталкивания Кассет генерирует прерывание дисковода. Она может определить статус дисковода и, базируясь на этой информации, либо завершить выполнение текущей команды, либо остановить ее.
Вопросы, связанные с характеристиками программных средств, являются вопросами оптимизации. В частности, перемещение блока каретки требует потребления мощности. Требования к мощности связаны со скоростью перемещения каретки, а выделяемое тепло определяется требуемой мощностью. Программное обеспечение стремится минимизировать скорость перемещения блока каретки, не влияя на время доступа для заданной команды.
Если команда ставится на очередь в программном обеспечении, то модули в программном обеспечении определяют начальное радиальное положение блока каретки относительно носителя, начальное положение по окружности блока каретки относительно носителя и начальную окружную скорость носителя. Модули программного обеспечения также определяют конечное радиальное положение блока каретки относительно носителя и конечное положение по окружности блока каретки относительно носителя. Затем программное обеспечение вычисляет траекторию скорости для блока каретки. Траектория скорости связана с начальным радиальным положением, начальным положением по окружности, конечным радиальным положением, конечным положением по окружности и начальной окружной скоростью. Траектория скорости вычисляется таким образом, чтобы при перемещении блока каретки из начального положения в конечное положение в соответствии с траекторией скорости блок каретки перемещался по радиусу и по окружности в конечное положение по существу за одно и то же время.
Программное обеспечение обеспечивает перемещение блока каретки из начального положения в конечное положение по существу в соответствии с полученной траекторией скорости. Блок каретки может начать перемещение из начального положения в конечное положение с заданной скоростью, прежде чем программное обеспечение рассчитает требуемую траекторию скорости. Вместо вычисления траектории скорости относительно начального радиального положения и положения по окружности, траектория скорости может быть рассчитана исходя из промежуточного радиального положения и промежуточного положения по окружности. Промежуточные положения по радиусу и по окружности соответствуют положению по радиусу и по окружности блока каретки в момент, когда программное обеспечение заканчивает вычисление траектории скорости.
Кроме того, программное обеспечение может определить конечную окружную скорость носителя. В этом случае траектория скорости дополнительно увязана с конечной окружной скоростью. Блок каретки перемещается из начального положения в конечное положение по существу в соответствии с траекторией скорости, а скорость вращения носителя изменяется от начальной окружной скорости до конечной окружной скорости. В этом случае блок каретки будет приходить в конечное положение, как по радиусу, так и по окружности, по существу за одно и то же время. Носитель может достигать конечной окружной скорости как раньше, так и в то же самое время, или после прихода блока каретки в конечное положение.
Алгоритм оптимизации характеристик программного обеспечения, хотя раскрыт здесь применительно к магнитооптическому дисководу, в равной мере применим к оптическим дисководам, без каких-либо ограничений, таким, как дисководы с ПЗУ на компакт-дисках, дисководы на компакт-дисках для записи, на мини-дисках, на дисках с однократной записью и многократным считыванием, на видеодисках, на аудио-компакт-дисках. Кроме того, данный алгоритм применим для дисководов на магнитных носителях, как с фиксированными дисками, так и со съемными дисками.
SCSI-команда Выталкивания Кассеты может быть отменена с помощью кнопки выбора. Она может быть выполнена в форме DIP-переключателя.
Тест Внешнего Кодека и Тест Связывающих Логических Схем выполняются как часть Самокалибровки При Включении Питания, предусматривают считывание и запись информации при определенных условиях для того, чтобы обеспечить надлежащее функционирование Внешнего Кодека и Связывающих Логических Схем.
Последующие разделы описывают программное обеспечение системы более детально. На дату подачи настоящей заявки данное описание содержит сведения о наилучшем современном режиме, соответствующем изобретению, в достаточной степени надежном и эффективном. Специалистам в данной области техники следует иметь в виду, что в следующих разделах отдельные объекты идентифицированы символом "TBD", показывающим, где вышеописанные подходы к реализации могут быть применимы.
SCSI программные средства дисковода
В последующих разделах будут описаны функциональные характеристики SCSI программных средств для дисковода Jupiter-1 для магнитооптических дисков 5,25 дюйм. SCSI программные средства составляют часть кода контроллера, выполняемого центральным процессором 80С188. Данное обсуждение не служит для описания функциональных характеристик кода контроллера, выполняемого цифровым процессором сигналов.
Требования к программному обеспечению, которые использовались при разработке данного аспекта настоящего изобретения, включены в данное обсуждение и содержатся в разделе, озаглавленном А. Требования к программному обеспечению. Для ссылки здесь могут быть приведены следующие документы: 1) Cirrus Logic CL-SM330, Optical Disk ENDEC/ECC, April 1991, 2) Cirrus Logic CL-SM331, SCSI Optical Disc Controller, April 1991, 3) MOST MANUFACTURING,Inc., 1,7 ENDEC/FORMATTER, August 2, 1994, 4) MOST Manufacturing, Inc., Jupiter -1 Product Specification, September 15, 1994, 5) MOST Manufacturing, Inc., 80C188/TMS20C5X Communications, Rev. XH, August 25, 1994.
Поддержка SCSI: Команды SCSI: Команды SCSI, поддерживаемые программным обеспечением Jupiter, приведены в таблицах 1-5 ниже. Кроме пречисления поддерживаемых команд таблицы 1-5 идентифицируют команды, которые не действуют при выдаче их на дисковод, если установлены носители типа 1x, CCW, О-ROM, P-ROM. Столбец для P-ROM показывает команды, выданные блокам, которые находятся в группе только для считывания носителей на P-ROM.
Полное описание множества SCSI команд, которые должны поддерживаться, содержится в технических условиях на продукт Jupiter-1, раздел 9, Поддержка SCSI команд. Важно отметить, что команды Выбор Записи и Выбор Опознавания не будут поддерживаться программными средствами Jupiter-1.
SCSI сообщения: SCSI сообщения, которые будут поддерживаться программным обеспечением Jupiter-1, приведены ниже в таблице 6.
Важно отметить, что сообщение Окончить ввод/вывод не будет поддерживаться.
Страницы SCSI режимов: Страницы режимов, которые будут поддерживаться программным обеспечением Jupiter, приведены ниже в таблице 7.
Сохраняемые страницы не будут поддерживаться программным обеспечением Jupiter. Важно отметить, что страницы режимов 20h и 21h не будут поддерживаться.
Сброс: сброс будет выполняться дисководом в ответ на SCSI-команды Сброс Шины, Сброс Проигрывателя-автомата или отказ питания 12 В. Эти функции, выполняемые дисководом для каждого из этих типов сбросов, описаны ниже в соответствующих подразделах.
SCSI Сброс Шины: Когда выдается сигнал SCSI Сброс Шины, то формируется прерывание INT3, выдаваемое на 80С188. Использование INT3 обеспечивает дисководу гибкость реагирования на сброс, как на Жесткий или Программируемый Сброс. Однако использование INT3 предполагает, что вектор прерывания для INT3 все еще корректен. Если программное обеспечение неумышленно перезаписало этот элемент в Таблице Вектора Прерываний (IVT), то сброс не будет восстанавливать дисковод. Единственным вариантом, для пользователя будет отключение питания дисковода и повторное включение.
Подпрограмма Обслуживании Прерываний (ISR) INT3 должна определять с помощью кнопки выбора, должен ли выполняться Жесткий или Программируемый Сброс. Если вариант Жесткого Сброса блокирован, то будет выполняться Программируемый Сброс.
Жесткий (SCSI) Сброс: Когда дисководом обнаруживается команда SCSI Сброс Шины и кнопка выбора Жесткого Сброса разблокирована (показывает Жесткий Сброс), дисковод 1) не будет пытаться обрабатывать какие-либо команды, осуществляемые в настоящее время, 2) не будет записывать какие-либо данные, которые могут находиться в буферном ЗУПВ (т.е. в Кэше Записи), на носитель, 3) не будет сохранять какие-либо резервирования SCSI компонентов, 4) будет удалять из очереди все ожидающие команды, 5) будет выполнять операции, изложенные в следующем разделе. Последовательность Включения Питания, для Жесткого Сброса, 6) будет устанавливать значения для каждой страницы режимов на их значения по умолчанию, 7) будет устанавливать условие прерывания блока.
Без использования аппаратной линии сброса для сброса различных микросхем на плате, программное обеспечение должно использовать средства программного сброса микросхем, которые обладают такими средствами. Программное обеспечение должно также инициализировать регистры, как описано на стр.36 руководства Cirrus Logic SM330 и на стр.47 руководства Cirrus Logic SM331 с учетом различий между жестким и программируемым сбросом микросхем.
Программируемый SCSI Сброс: Когда дисковод обнаружил SCSI команду Сброс Шины и кнопка выбора Жесткого Сброса блокирована (показывает Программируемый Сброс), дисковод 1) не будет пытаться обрабатывать какие-либо команды, осуществляемые в настоящее время, 2) не будет записывать какие-либо данные, которые могут находиться в буферном ЗУПВ (т.е. в Кэше Записи), на носитель, 3) не будет сохранять какие-либо резервирования SCSI компонентов, 4) будет удалять из очереди все ожидающие команды, 5) будет выполнять операции, изложенные в следующем разделе. Последовательность Включение Питания, для Программируемого Сброса, 6) будет устанавливать значения для каждой страницы режимов на их значения по умолчанию, 7) будет устанавливать условия прерывания блока.
Сброс Проигрывателя-автомата: Если Проигрыватель-автомат выдал команду Сброс Проигрывателя-автомата во время последовательности включения питания, дисковод а) должен игнорировать команду Выталкивания диска, б) должен ожидать пока команда Сброс Проигрывателя-автомата будет отменена перед выполнением SCSI инициализации. Проигрыватель-автомат может выдать команду Сброс в любой момент для изменения SCSI ID (идентификатора) дисковода.
Отказ Питания 12 В: Если питание 12 В падает ниже некоторого значения (TBD), генерируется сброс программного обеспечения, передаваемый на 80С188, SM330, SM331, RLL(1,7) внешний кодек. Как только кодек будет установлен в исходное состояние, он будет управлять сбросом следящих систем в их инициализированное состояние, которое устанавливается и, в свою очередь, приведет к сбросу цифрового процессора сигналов и следящих систем.
Условия невозможности установки в исходное состояние: Когда дисководом обнаружена неисправимая ошибка (см. таблицу 8), формируется сообщение о наличии условий невозможности установки в исходное состояние. Такое условие вынуждает дисковод реагировать на Команду Опознавания Запроса Ключом Опознавания ОШИБКИ АППАРАТНЫХ СРЕДСТВ, Кодом Ошибки, ОШИБКА ВНУТРЕННЕГО КОНТРОЛЛЕРА, и дополнительным классификатором кода ошибки опознавания, специфическим для конкретной ошибки. SCSI команда Передачи Диагностики может устранить источник ошибки аппаратных средств и устранить условие невозможности установки в исходное состояние. Если команда Передачи Диагностики не привела к успеху в устранении ошибки аппаратных средств, то потребуется SCSI Сброс Шины для очистки указанного условия. SCSI Сброс Шины, принятый при наличии в дисководе условия невозможности установки в исходное состояние, вынуждая дисковод выполнять Жесткий Сброс и осуществлять полную диагностику. Таким образом, любая серьезная ошибка, при выполнении операции, будет сначала прерывать текущую операцию и затем препятствовать попыткам дисковода изменить состояние носителя при последующих операциях.
Поддержка мульти-инициатора: Поддержка множества инициаторов будет обеспечена программным обеспечением Jupiter. Очередь приходящих запросов будет поддерживаться программным обеспечением для упорядочения запросов от множества инициаторов для команд разъединения. Тегированные упорядоченные в очередь команды первоначально не будут поддерживаться, однако, построение программного обеспечения не препятствует возможности добавить такие средства впоследствии.
Когда принята команда, не связанная с доступом к носителю, при текущей обработке дисководом разъединенной команды доступа к носителю, программное обеспечение должно обеспечивать обслуживание новой команды при сохранении соединения. Точный способ обеспечения такой возможности еще не определен. Команды, которые будут поддерживаться способом без разъединения, приведены ниже в таблице 9.
SCSI отклик ЗАПРОС/ПОДТВЕРЖДЕНИЕ: Микросхема Cirrus SM331 принимает первые шесть байтов Блока Дескриптора SCSI команды и генерирует прерывание. Программное обеспечение должно затем использовать Программируемый Ввод/Вывод для переноса любых оставшихся байтов. Если в программе произошла задержка, произойдет остановка команды между шестым и седьмым байтами. Время ожидания дисковода для реагирования на прерывание Cirrus SCSI должно быть в пределах следующего диапазона: 20 мкс - приемлемое значение, 40 мкс - неудовлетворительное значение, 150 мкс - неприемлемое значение.
SCSI команда запроса: Накопитель будет реагировать на SCSI команду запроса возвратом на уровень пересмотра программного обеспечения для SCSI программных средств и программных средств цифрового процессора сигналов (ЦПС), контрольной суммой для SCSI программных средств флэш-ППЗУ и ППЗУ ЦПС и битом, индицирующим то, поддерживается ли в настоящее время функция Жесткого Сброса или Программируемого Сброса.
Инициализация: Диагностика: Диагностика, выполняемая дисководом, осуществляется при Самокалибровке При Включении Питания, в ответ на SCSI команду Передачи Диагностики или когда дисковод обнаружит подключения кабеля интерфейса последовательной диагностики.
Самокалибровка При Включении Питания: При выполнении этой процедуры дисковод будет выполнять проверки, перечисленные ниже. Детальное описание каждого теста приведено ниже в разделе под названием:
В. Определение Самокалибровки При Включении Питания. Эти тесты включают следующее: 1) проверка регистров и флагов блока 80С188, 2)проверка ЗУПВ ЦП, 3) проверка вектора прерываний блока 80С188, 4) проверка контрольной суммы ПЗУ, 5) проверка регистров SM331, 6) проверка контроллера последовательности SM331, 7) проверка кодека SM330, 8) проверка внешнего кодека, 9) проверка связующих логических схем (СЛС), 10) проверка буферного ЗУПВ, 11) самокалибровка при включении питания ЦПС, 12) проверка магнита смещения.
Если при выполнении проверки буферного ЗУПВ определено, что какое-либо из буферных ЗУПВ является дефектным, то дисковод признается непригодным к использованию. Дисковод будет реагировать на SCSI команды, но будет только формировать сообщения об ошибках аппаратных средств. Проверка буферных ЗУ должна выполняться в два этапа. На первом этапе проверяется всего лишь 64 Кбайта буферного ЗУ. В течение этого времени дисковод будет отвечать сигналом занятости на SCSI команды. После инициализации дисковода остальная часть буферных ЗУПВ будет проверяться в режиме фоновой работы (см. раздел Последовательность Включения Питания). Если при фоновом режиме проверки обнаружено, что какое-либо из буферных ЗУПВ является дефектным, то дисковод будет формировать сообщение об условии невозможности установки в исходное состояние.
Команда Передачи Диагностики: Когда дисковод получает SCSI команду Передачи Диагностики, дисковод будет выполнять следующую диагностику: 1) проверка контрольной суммы ПЗУ, 2) проверка контроллера последовательности SM331, 3) Проверка SCSI интерфейса SM331, 4) проверка кодека SM330, 5) проверка внешнего кодека, 6) проверка СЛС, 7) проверка буферных ЗУПВ, 8) проверка магнита смещения. Проверки, проводимые по команде Передачи Диагностики, будут теми же самыми, что и выполняемые дисководом при осуществлении Самокалибровки При Включении Питания, как описано выше.
Интерфейс Последовательной Диагностики: Когда питание дисковода включено, он будет проводить диагностику по пунктам 1-4, как указано в разделе Самокалибровка при Включении Питания, и затем осуществлять проверку для установления наличия подключенного кабеля интерфейса последовательной диагностики. Если кабель не обнаружен, то дисковод будет продолжать выполнение Самокалибровки При Включении Питания (СПВП). Если кабель обнаружен, то дисковод будет прерывать выполнение СПВП и подготавливаться к приему команд диагностики через интерфейс последовательной диагностики. Команды диагностики и их формат не являются предметом настоящего обсуждения.
Инициализация микросхем: Инициализация SM330: В этом разделе описана инициализация блока Cirrus Logic SM330. Мнемоника, использованная для регистров SM330, приведена в таблице 31 в разделе С. Регистры SM330. Операции, выполняемые при инициализации Cirrus Logic SM330, перечислены ниже:
1) Сохраняется текущее значение для регистра выхода общего назначения (EDC_GPO).
2) Микросхема устанавливается в исходное состояние путем установки полей EDC_CHIP_RESET, EDC_OPER_HALT, EDC_ERROR_RESET в EDC_CFG_REG1.
3) Поля EDC_ VU_PTR_SRC_MODE, SDC_130MM_MODE, EDC_1_SPEED_TOL устанавливаются в EDC_CFG REG2.
4) Регистр EDC+SPT устанавливается на число по умолчанию секторов на дорожку, SECT_PER_TRK_RLL_1X_512_1.
5) Поля EDC_SM_WIN_POS, DC_SMM (сдвинуто влево на 3), EDC_SMS устанавливаются в регистре EDC_SMC.
6) Регистр EDC_RMC устанавливается на значение по умолчанию 2.
7) Регистр EDC_ID_FLD_SYN_CTL устанавливается на значения по умолчанию 2 из 3 ID и 9 из 12 Меток Синхронизации Данных.
8) Регистр EDC_WIN_CTL инициализируется в 0х00.
9) Микросхема выводится из исходного состояния путем записи 0х00 в регистр EDC_CFG_REG1.
10) Сохраненные значения из регистра EDC_GPO записываются в регистр.
11) Регистр EDC_CFG_REG3 инициализируется в 0х00.
12) Все прерывания сбрасываются путем записи 0xFF в регистры EDC_INT_ STAT, EDC_MED_ERR_STAT.
13) Все прерывания микросхем блокируются путем записи 0х00 в регистры EDC_INT_EN_REG, EDC_MED_ERREN.
14) Отсчет байта синхронизации контроллера последовательности инициализируется путем записи 40 в регистр EF_SYNC_BYTE_CNT_LMT.
15) Указатель Адреса Буферного ЗУ Данных инициализируется в нуль (регистры EDC_DAT_BUF_ADR_L, EDC_DAT_BUF_ADR_M, EDC_DAT_BUF_ADR_H).
16) Регистр EDC_TOF_WIN_CTL очищается в 0х00.
17) Регистр EDC_SM_ALPC_LEN очищается в 0х00.
18) Регистр EDC_PLL_LOCK_CTL инициализируется в 0хЕ0.
19) Регистр EDC_PLL_RELOCK_CTL очищается в 0х00.
20) Регистр EDC_LFLD_WIN_CTL очищается в 0х00.
21) Ячейки ЗУПВ Корректора Кода с исправлением ошибок 0х00 и 0х01 обнуляются.
22) Ячейки ЗУПВ Корректора Кода с исправлением ошибок 0x0F и 0х016 обнуляются.
23) Ячейки ЗУПВ Корректора Кода с исправлением ошибок 0х20 и 0х027 обнуляются.
24) Порог ЗУПВ Корректора Кода с исправлением ошибок для секторной коррекции инициализируется на 0x0F.
25) Порог ЗУПВ Корректора Кода с исправлением ошибок для коррекции с чередованием инициализируется на 0х03.
26) Регистр EDC_GPO инициализируется путем установки в исходное состояние битов DSP_DIR_, BIAS_EN_, BIAS_E_W_, SCLK, SDO, MIRROR_TX_.
27) Светодиоды дисковода выключаются.
Инициализация SM331: Этот раздел описывает инициализацию Cirrus Logic SM331. Мнемоника, использованная для регистров SM331, представлена в таблице 32 в разделе D. Регистры SM331.
Инициализация SM331 включает считывание состояний кнопок выбора и инициализацию средств SCSI, Администратора Буферных ЗУ, Контроллера Последовательности микросхемы. Для считывания состояний кнопок выбора с тремя состояниями в шину SCSI программное обеспечение выполняет следующие операции:
1) SM331 устанавливается в исходное состояние путем установки BM_SW_RESET в регистре BM_MODE_CTL.
2)SM331 выводится из исходного состояния путем очистки BM_SW_RE-SET из регистра BM_MODE_CTL.
3) Поля SF_LOCAL_HINT_EN, SF_LOCAL_DINT_EN, SF_SCSI_IO_40_47H устанавливаются в регистре SF_MODE_CTL.
4) Бит BM_MOE_DISABLE устанавливается в регистре BM_MODE_CTL.
5) Регистр BM_SCHED_DATA считывается дважды. (Первое считывание инициирует действительный перенос данных из буферного ЗУ, из которого осуществляется выборка при втором считывании.)
6) Считанное значение дополняется и сохраняется как значение, соответствующее кнопкам выбора.
7) Бит BM_MOE_DISABLE очищается в регистре BM_MODE CTL.
Операции, выполняемые при инициализации средств SCSI в составе SM331, приведены ниже:
1) ID SCSI считывается с 20-штыревого соединителя через регистр GLIC_JB_ INP_REG и помещается в переменную target_id.
2) Операция Разрешения Контроля по четности SCSI считывается с 20-штыревого соединителя через регистр GLIC_JB_INP_REG.
3)Регистр SCSI_MODE_CTL устанавливается посредством SCSI ID и Разрешения Контроля по четности SCSI, устанавливается поле CLK_PRESCA-LE.
4) Регистр контроля фазы SCSI_PHA_CTL очищается в 0х00.
5) Регистр контроля синхронизации SCSI_SYNC_CTL инициализируется значением (0x0F).0x10.
6) Стек Администратора Буферного ЗУ очищается путем записи 0х10 в регистр BM_STAT_CTL.
7) Поля BM_SCSI_DATA_2T, BM_DRAM_BURST_EN устанавливаются в регистре BM_ STAT_CTL Управления Администратора Буферного ЗУ.
8) Регистр BM_XFER_CTL контроля Переноса Администратора Буферного ЗУ инициализируется в 0х00.
9) Регистр SCSI_SEL_REG идентификатора повторного выбора SCSI устанавливается на значение идентификатора (ID) SCSI дисковода.
10) Биты SCSI_RESET, SCSI_ATTN, SCSI_OFST_OVERRUN, SCSI_BUS_FREE, SCSI_ BFR_ PTY_ERR, SCSI_BUS_PTY_ERR устанавливаются в регистре статуса SCSI SCSI_ STAT_1.
11) Регистр SCSI_STAT_2 инициализируется в 0xFF.
12) Прерывания SCSI блокируются путем записи 0х00 в регистр SCSI_NT_EN_ 2.
Операции, выполняемые при инициализации части Администратора Буферного ЗУ в составе SM331, состоят в следующем:
1) Поля BM_SCSI_DATA-2T, BM_DRAM_BURST_EN устанавливаются в регистре BM_ TAT_TL Управления Администратора Буферного ЗУ.
2) Регистр BM_EFER_CTL управления Переносом Администратора Буферного ЗУ инициализируется в 0х00.
3) Поля BM_DRAM, BM_256K_RAM, BM_PTY_EN, BM_NO_WS устанавливаются в регистре BM_MODE_CTL Управления Режимами Администратора Буферного ЗУ.
4) Синхронизация Динамического ЗУППВ инициализируется в регистрах BM_TIME_CTL, BM_DRAM_REF_PER.
5) Размер Буферного ЗУПВ кодируется в регистре BM_BUFF_SIZE.
6) Указатель Адреса Диска инициализируется в 0х000000 в регистрах BM_DAPL, BM_DAPM, BM_DAPH.
7) Указатель Адреса Главной ЭВМ инициализируется в 0х000000 в регистрах BM_HAPL, BM_HAPM, ВМ_НАРН.
8) Указатель Адреса Остановки инициализируется в 0х000000 в регистрах BM_SAPL, BM_SAPM, BM_SAPH.
Операции, выполняемые при инициализации части Контроллера Последовательности в составе SM331, состоят в следующем:
1) Контроллер Последовательности останавливается путем записи 0x1F (адрес остановки) в регистр SF_SEQ_STRT_ADR адреса остановки Контроллера Последовательности.
2) Устанавливаемый по умолчанию размер сектора 512 байт устанавливается в регистре SF_SECT_SIZE размера сектора путем записи 0х00.
3) Отсчет байта синхронизации инициализируется путем записи х028 в регистр SF_SYNC_BYTE_CNT_LMT.
4) Регистр SF_OP_CTL контроля операций инициализируется путем установки поля SF_DATA_BR_FLD_EN.
5) Регистр SF_BRANCH_ADR адреса ветвления инициализируется в 0х00.
6) Прерывания Контроллера последовательности блокируются путем записи 0х00 в регистр SF_INT_EN.
7) Устанавливаемая по умолчанию программа запоминания управления записью загружается в Контроллер Последовательности Форматирования.
Инициализация Внешнего RLL(1,7) Кодека: (TBD)
Инициализация Связующих Логических Схем (СПС): Инициализация СПС включает операции: 1) установки бита Переопределения Фиксации Стробирования Считывания в регистре CLIC_JB_CTRL_REG и 2) разрешения всех прерываний в регистре GLIC_INT_EN_REG.
Инициализация SCSI: Программное обеспечение инициализации SCSI будет использовать 20-штыревой соединитель в качестве источника SCSI ID и Разрешения Контроля по четности SCSI дисковода. Если кабель подсоединен, то сигналы будут возбуждаться дисководом. Если кабель не подсоединен, то те же самые штыри будут использовать перемычки, установленные так, чтобы индицировать используемые SCSI ID и Контроль по четности SCSI.
Нагрузка SCSI шины в дисководе будет выбираться с помощью кнопок выбора. Не требуется взаимодействие с программным обеспечением для поддержки нагрузки SCSI.
Последовательность включения питания: В таблице 10 перечислены операции в порядке выполнения последовательности включения питания. Столбцы Включение Питания Программируемый Сброс, Жесткий Сброс идентифицируют, какие операции выполняются в состоянии Включения питания, Жесткого или Программируемого Сброса. Если имеет место условие невозможности установки в исходное состояние, когда получен сигнал сброса, который должен генерировать Программируемый Сброс, то сброс будет в таких условиях осуществляться как Жесткий Сброс, вынуждая дисковод завершить полную процедуру диагностики.
В данный момент блок 80С188 проверяет, следует ли выполнять Жесткий Сброс или осуществить вариант, называемый программно-аппаратным (Firm) Сбросом. Последний не будет сбрасывать ЦПС. Такой метод существенно экономит время, не требуя загрузки кода ЦПС или повторной инициализации вех следящих цепей ЦПС. Программно-аппаратный Сброс будет проверять правильность сигнатуры ЗУПВ (TBD) в памяти ЦП блока 80С188, убеждаясь в том, что отсутствует условие невозможности установки в исходное состояние и что ЦПС способен надлежащим образом реагировать на команды Получения Статуса. Если любое из этих условий не выполняется, то дисковод будет выполнять Жесткий Сброс. Продолжение описания содержится в таблице 11.
Прерывания Дисковода: Прерывания дисковода являются индикацией того, что в дисководе существует аномальное состояние. Прерывания генерируются либо аппаратными средствами, связанными с СЛС, либо ЦПС. Прерывания ЦПС передаются через СЛС для формирования комбинированного источника прерываний (в INT2) для блока 80С188. В следующих разделах описаны прерывания, которые генерируются посредством ЦПС. В разделе Прерывания СЛС описаны прерывания, которые генерируются другими аппаратными средствами, взаимосвязанными с СЛС. Программное обеспечение может определить источник прерывания, исследуя состояние Регистра Статуса Прерываний СЛС (Базовый Адрес+0,5h).
Прерывания ЦПС: Источники прерываний ЦПС могут быть подразделены на две категории, которые включают прерывания преждевременного прекращения и прерывания, не ведущие к преждевременному прекращению. Прерывание преждевременного прекращения генерируется посредством ЦПС, когда возникает катастрофическое событие, которое требует немедленного блокирования средств записи дисковода. Когда ЦПС выдает прерывание преждевременного прекращения, аппаратные средства дисковода отменяют Строб Считывания, выключают лазер и генерируют Прерывание Дисковода для блока 80С188. Если дисковод генерирует прерывание, не ведущее к преждевременному прекращению, то для блока 80С188 генерируется только Прерывание Дисковода.
Прерывания ЦПС, ведущие к преждевременному прекращению: Условия, которые могут вызвать формирование в ЦПС прерывания преждевременного прекращения, представлены в таблице 12.
Ошибка Фокусировки формируется в ЦПС, когда сигнал ошибки фокусировки превысит программируемый порог, установленный блоком 80С188. Ошибка Трекинга формируется в ЦПС, когда сигнал ошибки трекинга превысит программируемый порог, установленный блоком 80С188. Ошибка Управления Мощностью Считывания Лазера формируется в ЦПС, когда выходной сигнал лазера не может больше управляться посредством ЦПС в пределах порогов, установленных блоком 80С188. Ошибка Установки Скорости Шпинделя формируется в ЦПС, когда скорость шпинделя падает ниже минимального числа об/мин, установленного блоком 80С188, или повышается выше максимального числа об/мин, установленного блоком 80С188.
Прерывания, Не Ведущие К Преждевременному Прекращению, формируемые ЦПС: Условия, которые вызывают формирование посредством ЦПС данных прерываний, представлены в таблице 13.
Прерывание вида 10-сек Интервал Таймера формируется в ЦПС в ответ на сигнал, что его внутренние часы отсчитали 10 секунд. Блок 80С188 обеспечивает поддержание отсчета времени часов, запитываемых в часовые минутные интервалы. Каждое прерывание вида 10-сек Интервал Таймера перемещает вперед запитываемый часовой отсчет. Дефектная Контрольная Сумма Команды формируется в ЦПС, когда осуществленное им вычисление контрольной суммы команды не согласуется с содержимым байта контрольной суммы в команде, полученной от блока 80С188. Сообщение Неизвестная Команда формируется в ЦПС, когда содержимое командного байта, полученного от блока 80С188, не является корректной командой для ЦПС.
Сообщение Дефектное Значение Ошибки Поиска формируется в ЦПС, когда а) первый элемент в Таблице Скорости Поиска пустой, или б) Цепь Фокусировки не замкнута (это может возникнуть, если команда поиска выдана в качестве первой команды до инициализации ЦПС). Ошибки Установки Поиска будут проявляться как Ошибки Трекинга. ЦПС будет блокировать Ошибки Трекинга на (TBD) мкс после замыкания Следящей Цепи, чтобы препятствовать появлению ложных Ошибок Трекинга за время установки. Сообщение об Ошибке Выталкивания Кассеты формируется в ЦПС, когда сигнал Ограничения Выталкивания не обнаружен в ЦПС в течение (TBD) мкс.
Прерывания СЛС: СЛС обеспечивают интерфейс для различных входных и выходных сигналов, которые должен обрабатывать блок 80С188. Входные сигналы, которые определены как формирующие прерывания с СЛС, представлены в таблице 14.
Прерывание вида Сброс Проигрывателя-автомата формируется посредством СЛС, когда обнаруживается нарастающий фронт входного сигнала Сброса Проигрывателя-автомата на 20-штыревом соединителе. Прерывание вида Запрос Понижения Мощности Проигрывателя-автомата формируется посредством СЛС при обнаружении нарастающего фронта входного сигнала Запроса Понижения Мощности Проигрывателя-автомата на 20-штыревом соединителе дисковода. Прерывание вида Выталкивание Кассеты с Проигрывателя-автомата формируется посредством СЛС, когда обнаруживается нарастающий фронт входного сигнала Выталкивания Кассеты с Проигрывателя-автомата на 20-штыревом соединителе дисковода. Прерывание вида Выталкивание Кассеты с Передней Панели формируется посредством СЛС при обнаружении нарастающего фронта сигнала с переключателя Выталкивания Кассеты на Передней Панели. Прерывание вида Введение Кассеты (кассета обнаруживается в горловине дисковода) формируется посредством СЛС при обнаружении нарастающего или спадающего фронта сигнала с Переключателя Введения Кассеты. Это прерывание может быть сформировано аппаратными средствами СЛС, однако, в настоящее время отсутствует реальный переключатель для формирования такого прерывания. В настоящее время отсутствуют программные средства поддержки этого режима. Прерывание вида Наличие Кассеты (кассета установлена на втулке дисковода) формируется посредством СЛС при обнаружении переднего или заднего фронта сигнала с Переключателя Установки Кассеты.
Восстановление Прерываний Дисковода: Код Прерываний Дисковода должен обслуживать все Прерывания Дисковода и возвращать дисковод в надежное известное состояние. Для выполнения этого код Прерываний Дисковода должен быть разделен на Программу Обслуживания Прерываний (ПОП) и Программу Обработки. Программа обслуживания Прерываний Дисковода должна выполняться как наиболее приоритетная и может приостанавливать Программы Обслуживания Прерываний SCSI и/или Диска и блокировать любые операции, приводя дисковод в надежное известное состояние. Как только операция блокирована, Программы Обслуживания Прерываний SCSI или Диска могут продолжать выполнение и выход. Часть Программы Обработки может тогда свободно выполняться и пытаться привести дисковод в известное состояние. Часто могут иметься множества Прерываний Дисковода, когда дисковод проходит через множество дефектных состояний, что приводит к самопрерыванию Программы Обработки.
Когда ЦПС обнаруживает Прерывание Дисковода, то соответствующее состояние прерывания будет формироваться посредством СЛС (в INT2), передаваемое в блок 80С188. Если прерывание представляет собой прерывание преждевременного прекращения, то СЛС также отменяет Управление Записью и выключает лазер. Программа Обслуживания Прерываний Дисковода будет останавливать любые осуществляемые операции Дисковода путем остановки Контроллера Последовательности Форматирования SM331, SM330 и внешнего кодека. Добавочный микропроцессор может быть предусмотрен для вызова прикладной подпрограммы остановки. В разделе Уведомления о Прерывания Дисковода содержится дополнительная информация.
Программа Обработки Прерываний Дисковода обеспечивает идентификацию причин Прерывания Дисковода, очистку источника прерывания, запуск процедур восстановления для приведения дисковода в известное состояние и проверку того, что условие ошибки очищено. Источник Прерывания Дисковода определяется анализом Регистра Статуса Прерывания СЛС (Базовый Адрес+0,5h) и, возможно, запроса текущего состояния ЦПС. Относительные приоритеты возможных ошибок рассмотрены в следующем разделе. Если ЦПС является источником прерывания, то Программа Обработки Прерываний Дисковода передает команду в ЦПС сбросить условия прерывания и очистить биты статуса. Процедура восстановления ошибки для каждого из различных условий ошибок описана ниже.
Приоритеты Ошибок Прерывания Дисковода: В данном разделе перечислены различные условия ошибок Прерывания Дисковода, которые распознаются дисководом Jupiter, а также относительные приоритеты для каждого типа ошибок. В таблице 15 представлены Приоритеты Прерываний Дисковода с относительным ранжированием каждой из этих ошибок.
Восстановление Ошибки Прерывания Дисковода: В этом разделе описаны различные условия ошибок Прерываний Дисковода, которые распознаются в дисководе Jupiter. В каждом подразделе описаны биты статуса, используемые для классификации условий ошибок и псевдокод для обработки условий ошибок.
Представленный псевдокод разработан, исходя из Программы Обработки Прерываний Дисковода, используемой в настоящее время совместно с продуктом RMD-5300, и предназначен для использования в качестве рекомендуемого. Реальный код использует множество флагов для дальнейшего уточнения приоритетов Прерываний Дисковода.
Переменные SuggSenseKey, SuggSenseCode, SuggSenseCodeQ, представленные в псевдокоде, представляют поля Данных Опознавания SCSI соответственно Ключ Опознавания, Код Ошибки и Дополнительный Классификатор Кода Опознавания. Переменная unclr_cond_flag используется для указания, когда в Дисководе существует неисправимое условие. Такое условие заставляет дисковод реагировать на Команду Опознавания Запроса Ключом Опознавания Ошибки Аппаратных Средств (HARDWARE ERROR), Кодом Ошибки Внутренней Ошибки Контроллера (INTERNAL CONTROLLER ERROR) и Дополнительным Классификатором Кода Опознавания (ASCQ) текущего значения в переменной uncler_cond_flag. Сброс или выполнение команды Передачи Диагностики SCSI могут очистить неисправимое условие, вынуждая дисковод выполнить полную процедуру диагностики. Таким путем любая серьезная ошибка, обнаруженная при выполнении операции, не приведет к изменению состояния носителя в дисководе.
В следующих подразделах использованы следующие обозначения: S Стандартный Статус дисковода, О - Оптический Статус Дисковода, D - Статус ЦПС, G - Статус Прерывания СЛС. Стандартный Статус и Оптический Статус представляют собой модифицированные коды статуса ESDI для дисковода. В представленном ниже разделе Статус Команды Дисковода обеспечивает информацию для Статуса ESDI. В начале каждого подраздела перечислены биты статуса, которые используются для определения того, что существует конкретное ошибочное условие. Приведенный затем псевдокод описывает, как обрабатывается такое условие.
Дефект Команды (см. Схему 1 в конце описания).
Дефект команды имеет место, когда обнаружена дефектная контрольная сумма команды в ЦПС или в ЦПС принята неверная команда. Ни одна из этих ошибок не будет иметь место в конечном продукте, полученном в соответствии с данным изобретением. Поэтому, если это произойдет, то такие ошибки будут являться, вероятно, индикацией ошибки другого рода, например, дефекта памяти, которые будут обнаруживаться в процессе сброса требуемого для очистки неисправимого состояния.
Отклонение диска (см. схему 2 в конце описания).
Ошибка Отклонения Диска будет формироваться, если ЦПС не сможет успешно замкнуть следящие цепи фокусировки и/или трекинга после трех попыток.
Ошибка Выгрузки Кассеты (см. Схему 3 в конце описания).
ЦПС будет контролировать последовательность выталкивания кассеты и генерировать прерывание, если сигнал Ограничения Выталкивания не выдан спустя три секунды. Процедура восстановления состоит в трехкратных попытках выталкивания кассеты. Если ошибка продолжает сохраняться, то о дефекте посылается сообщение - сигнал ERROR - соответственно на SCSI и на 20-штыревой соединитель проигрывателя-автомата.
Запрос Выталкивания (см. Схему 4 в конце описания).
Запрос Выталкивания Кассеты может поступить как от Проигрывателя-автомата, так и с Передней Панели. Если кассета присутствует, шпиндель останавливается, и сигнал Проигрывателя-автомата CART_LOADED отменяется (действующий низкий уровень). Спустя время ожидания до остановки шпинделя (как определено в разделе Остановка Шпинделя) кассета выталкивается.
Изменение Носителя (см. Схему 5 в конце описания).
Данное условие существует, когда кассета находится на втулке и замыкает переключатель Установки Кассеты. Выдается сигнал Проигрывателя-автомата CART_LOADED (действующий низкий уровень).
Дефект Скорости Шпинделя (см. Схему 6 в конце описания).
ЦПС будет контролировать скорость шпинделя на основе допустимых значений скорости для различных типов носителей. Максимальная и минимальная скорости определены для ЦПС блоком 80С188. Если скорость шпинделя определена как лежащая вне определенного диапазона, то ЦПС будет генерировать прерывание.
Ошибка мощности дазера (см. Схему 7 в конце описания).
Если порог Мощности Считывания Лазера превышен, и это обнаружено ЦПС, то будет генерироваться прерывание преждевременного прекращения. Формируется сообщение о неисправимом положении, выдаваемое, если лазер не будет установлен в требуемое состояние после выполнения повторной калибровки.
Дефект фокусировки (см. Схему 8 в конце описания).
Порог для Ошибок Расфокусировки программируется блоком 80С188. Если сигнал фокусировки превышает установленные пороги, то ЦПС будет генерировать прерывание преждевременного прекращения, для 80С188.
Дефект записи (см. Схему 9 в конце описания).
Если сообщение Дефектного Поиска формируется ЦПС, то Программа Обработки Прерываний Дисковода должна запрашивать статус от ЦПС для определения того, была ли ошибка сформирована поиском или отсутствовала Таблица Скорости. Если установлен бит Дефектного Статуса, а бит статуса "Цепь Фокусировки Не Замкнута", то это означает, что таблицы поиска не инициализированы надлежащим образом. Если установлен только бит Дефектного Поиска, то Программа Обработки Прерываний будет посылать команду "Прерывание Сброса" на ЦПС, указывая, что бит статуса Дефектного Поиска должен быть очищен. Затем потребуется код поиска от 80С188 для повторного запуска с точки регистрации Прерывания Дисковода.
Порог для Ошибок Трекинга программируется блоком 80С188. Пороги могут быть установлены раздельно для считываний и для записей, если процедура считывания должна иметь более жесткие ограничения.
Когда обнаружена Ошибка Трекинга, ЦПС будет использовать "особое" прерывание для завершения операций дисковода. Программа Обработки Прерываний будет выдавать сообщение "Прерывание Сброса" на ЦПС.
Особый вопрос. Механизм восстановления состоит в том, чтобы позволить программному обеспечению выдать другую команду поиска (тем самым позволяя ЦПС осуществлять поиск и затем повторно перейти на сопровождение). Альтернативным подходом является размыкание Цепи Трекинга и затем выдача команды ЦПС повторно осуществить переход к трекингу. Этот подход, однако, не работает для дефектного режима, когда поиск не установился и головка "скользит" по диску. Поэтому наилучшим механизмом восстановления является попытка повторного поиска. Специальный код потребуется для обработки в случае, если последний поиск оказался неудачным и сформировал Ошибку Трекинга. Повторный Поиск был бы наилучшей попыткой восстановления.
Дефект Магнита Смещения (см. Схему 10 в конце описания).
Спиральный Режим: Если все условия ошибки устранены, то Программа Обработки Прерываний Дисковода должна возвратить дисковод в его исходное состояние для осуществления спирального режима (известного как отслеживание дорожек записи последовательно или блокировка переходов). Это выполняется сохранением исходного состояния при вводе и выполнением представленного на схеме 11 (см. в конце описания) кода после выхода.
Уведомление о Прерываниях Дисковода: Сообщения Прерывания Дисковода формируют прерывания для Программы Обработки Прерываний Дисковода, которая переводит дисковод в известное состояние. Программа Обработки Прерываний затем обеспечивает уведомление средств программного обеспечения, ответственных за управление текущими операциями, что имело место условие прерывания и что было сделано для очистки этого условия. Для уведомления программного обеспечения используются два механизма. Они включают сообщения и прямое уведомление.
Если задача инициировала операцию и ожидает, когда SCSI Программа Обслуживания Прерываний или Программа Обслуживания Прерываний Диска передадут сообщение, Программа Обработки Прерываний Дисковода передаст сообщение в очередь задач, указывающее, что произошло Прерывание Дисковода. Задача, которая ответственна за текущую операцию, сохраняется в переменной маршрутизации. Если часть программного обеспечения выполняет то, что могло бы сформировать в какой-либо момент Прерывание Дисковода (например, код поиска), непрерывно упорядочивающее очередь задач для сообщения, то могло бы иметься слишком много непроизводительной обработки. Второй механизм сообщений о Прерываниях Дисковода использует режим "длинного скачка" для перевода исполнения кода назад, к месту, где программное обеспечение знает, как осуществить повторный запуск алгоритма или попытаться сделать повторную попытку. Процесс идентификации, куда осуществить "длинный скачок", называется совмещением. Могут выполняться множество уровней совмещения, каждый новый уровень сохраняет информацию предыдущего совмещения в своем локальном стеке. Если раздел кода регистрируется (совмещается) самостоятельно, то код может таким образом идентифицировать подпрограмму, которую может вызвать Программа Обслуживания Прерываний Дисковода для выполнения контекстно-чувствительного преждевременного прерывания.
Форматы Носителей: Определение типов носителей: Тип носителей будет идентифицироваться с использованием следующей последовательности событий:
а) Кассета вводится или уже присутствовала, когда включается питание.
в) Блок 80С188 выдает команду приведения во вращение для 4х-скорости на электродвигатель шпинделя.
с) Блок 80С188 выдает команду для ЦПС уведомлять, если скорость в об/мин больше, чем 60 об/мин.
d) Когда ЦПС формирует прерывания при числе оборотов большем 60 об/мин, блок 80С188 выдает команду для ЦПС уведомить, когда число об/мин больше, чем 4х (четырехкратное) минимального числа об/мин.
е) Затем блок 80С188 выдает команду для ЦПС инициализировать:
1) ЦПС медленно находит внутренний тормозящий упор.
2) ЦПС осуществляет поиск к внешнему диаметру соответствующей (TBD) дорожки записи.
3) Режим по умолчанию соответствует тому, что разрешены перескоки назад и указание соответствует 4х.
4) Если ЦПС обнаружит ошибку в процессе первоначального поиска, то будет формироваться сообщение об ошибке для 80С188, который осуществит сброс ЦПС и затем повторную инициализацию.
f) Блок 80С188 пытается считать ID для определенной зоны (ТВD) для 4х соответственно (TBD) дорожкам от внутреннего диаметра.
g) Если ID не может быть считан, то блок 80С188 пытается считать ID, используя частоты с соседних зон плюс/минус (TBD) количество зон.
h) Если ID не может быть считан, то блок 80С188 выдает команду 2х (двукратной) скорости на электродвигатель шпинделя.
i) Блок 80С188 выдает команду для ЦПС уведомить, когда число об/мин больше, чем 2х минимального.
j) Если ЦПС осуществляет прерывание при числе об/мин больше, чем 2х минимального, то блок 80С188 выдает команду инициализации на ЦПС, затем пытается считать ID в зоне (TBD), соответствующей (TBD) дорожкам.
k) Если ID не может быть считан, то блок 80С188 пытается считать ID с использованием частот соседних зон в пределах плюс/минус (TBD) зон.
l) Если ID не может быть считан, то этапы (h)-(k) повторяются для 1х скорости.
m) Если ID не может быть считан, то блок 80С188 выдает команду 2х на электродвигатель шпинделя.
n) Блок 80С188 выдает команду ЦПС уведомлять, когда число об/мин меньше, чем 2х максимального.
о) Если ЦПС осуществляет прерывание, когда число об/мин меньше, чем 2х максимального, то блок 80С188 пытается считать ID, пытаясь выполнить качание по частоте. Закон качания соответствует следующему: зона по умолчанию, зона -1, зона +1, зона -2, зона +2 и т.д., пока не будут использованы все частоты.
р) Если ID не может быть считан, то блок 80С188 выдает команду 4х скорости на электродвигатель шпинделя.
q) Блок 80С188 выдает команду ЦПС уведомлять, когда число об/мин меньше, чем 4х максимального.
r) Если ЦАС осуществляет прерывание, когда число об/мин меньше, чем 4х максимального, то блок 80С188 пытается считать ID путем выполнения качания по частоте. Закон качания следующий: зона по умолчанию, зона -1, зона +1, зона -2, зона +2 и т.д., пока все частоты не будут испытаны.
ПРИ СЧИТЫВАНИИ ID:
s) Блок 80С188 выдает команду поиска положения в области SFP&.
t) Блок 80С188 пытается считать SFP-дачные для 512-байтных секторов. Если считывание безуспешно, то 80С188 пытается считать SFP-данные для 1024-байтных секторов.
и) Блок 80С188 инициализирует параметры носителя дисковода для типа используемого носителя и SFP-информации. Флаг проверки предварительной записи устанавливается для указания необходимости выполнения проверки предварительной записи перед осуществлением записи на носитель.
v) Блок 80С188 начинает инициализацию кассеты (т.е. считывает Дефектные Области Управления, строит групповые таблицы и т.п.). Если какая-либо из Дефектных Областей Управления должна быть перезаписана для того, чтобы сделать ее соответствующей другим областям, дисковод должен сначала проверить, не следует ли сначала провести проверку предварительной записи.
Поддержка носителей типа ССW (псвдо-WORM- с однократной записью и многократным считыванием): Функции Проверки Пробела Cirrus Logic SM330 должны использоваться для определения того, не записаны ли кассеты 1х или 2х. Поле DMP не будет использоваться. Функции Проверки Пробела Внешнего Кодека будут использоваться для проверки того, не записана ли кассета типа 4х. Поле DNP не будет использоваться.
После введения кассеты CCW в дисковод он автоматически блокирует Кэш Записи и очищает поле WCE (Деблокирование Кэша Записи) в Странице Режимов 08h, Параметры кэширования. Все инициаторы будут уведомляться об изменении по следующей команде с каждого инициатора путем выдачи команды СОСТОЯНИЕ ПРОВЕРКИ. Комбинация Ключ опознавания/Код опознавания, возвращаемая в ответ на Команду Опознавания Запроса, будет иметь вид ПРЕРЫВАНИЕ БЛОКА/ИЗМЕНЕНИЕ ПАРАМЕТРОВ ВЫБОРА РЕЖИМА (06h/29h).
Поддержка носителя типа ППЗУ: Особый вопрос. Для носителей типа ППЗУ сигнал PREFMT должен быть установлен, когда головка находится над или в пределах трех дорожек области ПЗУ на кассете. Алгоритм поиска должен принимать во внимание, где области ППЗУ находятся на кассете, и должен обеспечивать прохождение через них. От ЦПС может потребоваться осуществлять поиск в области ППЗУ при его инициализации. Этот первоначальный поиск должен выполняться с низкой скоростью для минимизации изменения в состоянии Ошибки Трекинга.
Стратегия повторения попытки: Когда дисковод пытается получить доступ к носителю, например, для считывания, стирания, записи, верификации, он может обнаружить ошибки носителя, ошибки коррекции или иные ошибки. Источниками ошибок носителя являются следующие: Метки Секторов (SM), Идентификаторы (ID) секторов. Данные Синхронизации (DS) или Ресинхронизация (RS). Источниками коррекции ошибок являются: Контроль при помощи Циклического Избыточного Кода (CRC) или Коррекция при помощи Кода с Исправлением Ошибок (ЕСС). Источниками других ошибок, которые может обнаружить дисковод, являются: ошибки Контроллера Последовательности Форматирования, Прерывания Дисковода или ошибки контроля по четности Буферного ЗУПВ. Для каждого носителя или ошибок коррекции дисковод сравнивает ошибку с порогом для конкретного типа ошибок и конкретного типа операции. Пороги хранятся в различных Страницах Режимов и могут быть модифицированы посредством главной ЭВМ. В таблице 16 представлены пороги по умолчанию, используемые дисководом.
Если ошибка носителя или коррекции превысит текущий порог, или обнаружен какой-либо другой порог, определенный выше, то дисковод будет пытаться повторить данную операцию, как описано в этом разделе. Повторные попытки выполняются, если только серьезная ошибка не привела к состоянию невозможности установки в исходное состояние или обнаружено иное условие преждевременного прекращения при попытках получения доступа к данным. Кроме того, повторные попытки не выполняются, если установлен внутренний флаг отладки - Блокировка Повторных Попыток Для Дисковода (drvRetryDisable), который устанавливается или очищается посредством ESDI команды SCSI считывания/записи (E7h).
Когда дисковод выполняет операцию считывания, он будет осуществлять максимальное количество повторных попыток, как указано в Странице Режимов 01h, Параметры Восстановления Ошибок Считывания/Записи, Отсчет Повторных Попыток Считывания (байт 3). Когда дисковод выполняет операции стирания или записи, он будет выполнять максимальное число повторных попыток, как указано в Странице Режимов 01h, Параметры Восстановления Ошибок Считывания/Записи, Отсчет Повторных Попыток Записи (байт 8). Когда дисковод выполняет операцию верификации, он будет выполнять максимальное число повторных попыток, как указано в Странице Режимов 07h, Параметры Восстановления Ошибок Верификации, Отсчет Повторных Попыток Верификации (байт 3).
Если сектор не может быть считан в пределах текущих порогов, дисковод может пытаться восстановить сектор с использованием особых средств, как описано ниже в разделе Особые Стратегии Восстановления. Если сектор восстановлен, он может быть перераспределен, как описано ниже в разделе Стратегия Перераспределения.
Проверка с Использованием Кода с Исправлением Ошибок: Проверка ошибок в операциях считывания или верификации выполняется аппаратными средствами в Cirrus Logic SM330. Вектора обновления для коррекции каких-либо байтов в ошибке генерируются посредством SM330 и передаются на SM331 посредством специализированного последовательного канала между двумя микросхемами. Коды Проверки Циклическим Избыточным Кодом (CRC) и Проверки с Исправлением Ошибок (ЕСС) для операции считывания формируются с помощью SM330.
Коррекция не применима к сектору для операции считывания, если бит Блокировки Коррекции (DCR) установлен в Странице Режимов 01h, Параметры Восстановления Ошибок Записи/Считывания. Код коррекции ЕСС также не применим к сектору для операции считывания, если бит Разрешения Ранней Коррекции (EEC) не установлен в Странице Режимов 01h, Параметры Восстановления Ошибок Записи/Считывания: Если после того, как все повторные попытки, кроме одной, оказались неудачными, причем бит ЕСС не установлен, то дисковод будет автоматически применять коррекцию при последней попытке, если бит DCR не установлен. Важно отметить, что при установленном бите DCR ошибки коррекции кода ЕСС обнаруживаются, но не корректируются.
Особые Стратегии Восстановления: Термин Особый режим Восстановления используется для описания процедуры применения всех возможных средств для восстановления данных с носителя. Стратегия состоит в селективном смягчении различных порогов для восстановления в конечном счете корректных данных. Абсолютные критерии для определения того, восстановлен ли сектор, состоят в том, могут ли данные быть скорректированы в пределах максимальных установленных порогов аппаратными средствами коррекции. Для минимизации неудачи коррекции пороги носителей снижаются в постепенной последовательности (TBD).
Особая Стратегия Восстановления инициализируется, если сектор не может быть считан в пределах текущих порогов и бит Переноса Блока (ТВ) или бит Разрешения Автоматического Перераспределения Считывания (ARRE) установлен в Странице Режимов 01h, Параметры Восстановления Записи/Считывания. Если данные для сектора полностью восстановлены и Автоматическое Перераспределение Считывания разрешено, то сектор может быть перераспределен, как описано ниже в разделе Стратегия Перераспределения.
Параметры дисковода, которые могут быть изменены при попытке восстановления данных, являются следующими: 1) ширина полосы фазоследящей цепи (нормальная, высокая, очень высокая), 2) частотная зона (ожидаемая зона -1, ожидаемая зона +1), 3) псевдометка сектора, 4) псевдоданные синхронизации, 5) фиксация первой ресинхронизации (сектор не приемлем для перераспределения, может быть только передан в главную ЭВМ), 6) (TBD).
Стратегия Перераспределения: Перераспределение - есть процесс перераспределения данных логического сектора в новый физический сектор. Сектор перераспределяется 1) в ответ на запрос от главной ЭВМ (CSI Команда Повторного Назначения Блока 07h), 2) когда сектор не может быть считан в пределах текущих порогов, сектор был полностью восстановлен, и когда установлен бит ARRE, 3) сектор не может быть стерт или записан с использованием текущих порогов и бит Разрешения Автоматического Перераспределения Записи (AWRE) установлен в Странице Режимов Olh, Параметры Восстановления Ошибки Записи/Считывания, 4) сектор не может быть проверен в пределах текущих порогов как часть SCSI Команды Записи и Верификации.
Перераспределение Записи: Когда данные сектора, которые превысили пороги считывания, полностью восстановлены и бит ARRE установлен, дисковод будет сначала пытаться перезаписать данные в тот же самый физический сектор, если превышение порога было связано с ошибкой Данных Синхронизации, Ресинхронизации или ЕСС-коррекции. Если данные для того же самого сектора могут теперь быть верифицированы в пределах порогов, определенных в Странице Режимов 07h, Параметры Восстановления Ошибок Верификации, сектор не будет перераспределен. Сектора, которые обусловили ошибки, вследствие ошибки в полях метки сектора или идентификатора, или сектора, которые не могут быть корректно подтверждены, перераспределяются в новый физический сектор.
Если для перераспределения логического сектора требуется новый физический сектор, дисковод будет записывать данные (используя пороги записи) в резервный сектор и осуществлять верификацию этого сектора (используя пороги верификации). Если сектор не может быть записан или подтвержден с использованием текущих порогов, другой физический сектор будет указан в качестве резервного, и процедура будет повторена. Может быть использовано максимально три резервных сектора при попытках перераспределения одного логического сектора.
Перераспределение Записи: Сектор, который не удовлетворяет порогу метки сектора или порогу числа корректных идентификаторов секторов, как определено в Странице Режимов 01h, Параметры Восстановления Считывания/Записи, будет перераспределен, если установлен бит разрешения автоматического перераспределения записи (AWRE).
Если новый физический сектор требуется для перераспределения логического сектора, то дисковод будет записывать данные (с использованием порогов записи) в резервный сектор и затем осуществлять верификацию этого сектора (с использованием порогов верификации). Если запись сектора или его верификация не могут быть осуществлены с использованием текущих порогов, то другой физический сектор будет идентифицирован в качестве резервного и процесс будет повторен. Будут использоваться максимально три резервных сектора при попытках перераспределить один логический сектор.
Верификация после перераспределения записи: Сектор, который не удовлетворяет порогам верификации, как определено в Странице Режимов 07h, Параметры верификации восстановления данных, в качестве части SCSI команды записи и верификации, будет перераспределен. Биты ARRE и AWRE не влияют на решение о перераспределении сектора, который не может быть верифицирован в пределах текущих порогов как часть SCSI команды записи и верификации.
Если новый физический сектор требуется для перераспределения логического сектора, дисковод будет записывать данные (с использованием порогов записи) в резервный сектор и затем осуществлять верификацию этого сектора (с использованием порогов верификации). Если сектор не может быть записан или верифицирован с использованием текущих порогов, другой физический сектор будет идентифицирован в качестве резервного и процедура будет повторена. Будут использоваться максимально три резервных сектора при попытках перераспределить один логический сектор.
Ответные SCSI коды ошибок: В последующих разделах описаны SCSI комбинации Ключ Опознавания/Код Опознавания/Дополнительный Классификатор Кода Опознавания (ASCQ) для каждого из описанных условий, описанных выше в разделах Стратегия Повторных Попыток и последующих. Контрольные биты, которые влияют на отклик дисковода и на SCSI комбинацию Ключ опознавания/Код Опознавания/ASCQ, направляемую обратно в главную ЭВМ, перечислены ниже в таблице 17 - Страница Режимов 01h, Параметры Восстановления Ошибок.
Ошибки при перераспределении: При попытке перераспределения логического сектора в новый физический сектор дисковод будет формировать сообщения о комбинациях опознавания, приведенных в таблице 18, если обнаружено указанное условие ошибки.
Автоматическое перераспределение считается невыполненным, если ошибка аппаратных средств или иная серьезная ошибка препятствует выполнению дисководом перераспределения. При выполнении перераспределения дисковод будет делать только три попытки расположить логический сектор в новом физическом секторе. Если потребуется более трех попыток, то дисковод заключает, что имеет место ошибка аппаратных средств. Этот подход ограничивает число попыток при перераспределении сектора и тем самым минимизирует время, требуемое для перераспределения, и минимизирует возможность использования всех имеющихся резервов. Если дисковод может записать и осуществить верификацию единственной Дефектной Области Управления (DMA) на диске, то он будет формировать сообщение об Ошибке Перечня Дефектов.
Коды Ошибок Считывания: В данном разделе идентифицированы условия, которые могут обусловить в дисководе возврат сообщения о статусе в главный компьютер при выполнении операции считывания. Будет ли действительно передано сообщение о статусе, зависит от того, выдал ли главный компьютер SCSI Команду Опознавания Запроса.
Эти условия могут быть подразделены на пять основных категорий, которые включают следующие: 1) попытка определить местоположение требуемого сектора, 2) попытка считать сектор, 3) попытка восстановить сектор с использованием особой стратегии, 4) попытка перераспределить сектор, 5) Прерывания Дисковода и другие серьезные ошибки. В таблице 18 представлены комбинации опознавания, которые формируют сообщение при неудаче перераспределения, а в таблице 8 представлены комбинации опознавания, сообщения о которых формируются при серьезных ошибках.
При попытках определения местоположения требуемого сектора сообщения о комбинациях, представленные в таблице 19, будут формироваться дисководом при возникновении указанного типа ошибок.
При попытках считывания сектора дисковод будет формировать сообщения о комбинациях, представленных в таблице 20, если будут обнаружены указанные типы ошибок, бит ARRE не установлен и данные не могут быть восстановлены в пределах порогов при выполнении повторных попыток. Если все повторные попытки исчерпаны и данные не восстановлены, то дисковод будет осуществлять особую стратегию восстановления, если установлен бит ТВ. Данные будут затем возвращаться в главный компьютер независимо от того, были ли данные восстановлены полностью. Если они восстановлены полностью, то данные не будут перераспределяться в новый сектор.
При попытках считывания сектора дисковод будет формировать сообщения о комбинациях опознавания, приведенных в таблице 21, при указанных условиях, если бит DCR установлен и данные могут быть восстановлены в пределах порогов при выполнении повторных попыток или особой стратегии восстановления. Если данные не могут быть восстановлены с использованием особой стратегии восстановления, то возвращаемые коды ошибок соответствуют представленным в таблице 20. Если данные полностью восстановлены и бит ARRE установлен, то дисковод будет пытаться перераспределить логический сектор в новый физический сектор.
При попытках считывания сектора дисководом будут сформированы сообщения о комбинациях опознавания, представленных в таблице 22 для указанных условий, если бит DCR не установлен и данные могут быть восстановлены в пределах порогов при выполнении повторных попыток или особой стратегии. Если данные не могут быть восстановлены при использовании особой стратегии, то возвращаемые коды ошибок будут соответствовать приведенным выше в таблице 20. Если данные полностью восстановлены и установлен бит ARRE, то дисковод будет пытаться перераспределить логический сектор в новый физический сектор.
Сообщение об ошибках считывания: В данном разделе описана логика, используемая программным обеспечением, при определении, когда устанавливать конкретную комбинацию опознавания, когда формировать сообщение об ошибке посредством Условия Проверки и когда осуществлять возврат данных (см. схему 12 в конце описания).
Коды Ошибок Верификации: В данном разделе представлены условия, которые обуславливают в дисководе возможность возврата сообщения о статусе в главный компьютер при выполнении операции верификации в ответ на SCSI Команду Верификации. Будет ли действительно сообщение о статусе передано, зависит от того, выдал ли главный компьютер SCSI Команду Запроса Опознавания.
Условия могут быть разделены на пять основных категорий, которые включают следующее: 1) попытки определения местоположения требуемого сектора, 2) попытки верификации сектора, 3) Прерывания Дисковода и другие серьезные ошибки. В таблице 8 приведены описания Серьезных Ошибок и комбинации опознавания, формируемые для этих ошибок.
При попытках определения местоположения требуемого сектора дисководом будут формироваться сообщения о комбинациях опознавания, перечисленных в таблице 19, при обнаружении ошибок указанного типа. При попытках верификации сектора дисководом будут формироваться сообщения о комбинациях опознавания, перечисленных в таблице 20, при обнаружении указанных типов ошибок. При операции верификации, однако, данные реально не будут возвращаться в главный компьютер. По определению особая стратегия восстановления данных никогда не применяется при верификации. Цель состоит в том, чтобы проверить, что данные могут быть считаны с использованием (потенциально) более жестких порогов Страницы Режимов 07h, Параметры Верификации Восстановления Ошибок. В ответ на невозможность верификации сектора при текущих порогах не будет выполняться автоматическое перераспределение секторов. (Примечание: Автоматическое перераспределение может выполняться при верификации после операции записи, которая инициализируется с помощью совсем другой SCSI команды).
Сообщения об Ошибках Верификации: В этом разделе описана логика, используемая программным обеспечением для определения того, когда необходимо устанавливать конкретные комбинации опознавания, когда формировать сообщения об ошибках посредством Условий Проверки и когда осуществлять возврат данных (см. схему 13 в конце описания).
Коды Ошибок Записи: В этом разделе представлены условия, которые обуславливают в дисководе формирование сообщений о статусе, которые могут быть переданы в главный компьютер при выполнении операции записи. Будет ли реально сообщение о статусе передано, зависит от того, выдал ли главный компьютер SCSI команду Опознавания Запроса.
Условия могут быть разделены на четыре основных категории, которые включают следующее: 1) попытки определить местоположение требуемого сектора, 2) попытки записать сектор, 3) попытки перераспределить сектор, 4) Прерывания Дисковода и другие серьезные ошибки. В таблице 18 представлены Коды Ошибок при попытках перераспределения сектора и комбинации опознавания, сообщения о которых формируются при серьезных ошибках.
При попытках определения местоположения требуемого сектора комбинации опознавания, ранее перечисленные в таблице 19, будут формироваться дисководом при обнаружении указанных типов ошибок. При попытках записи сектора комбинации опознавания, показанные ниже в таблице 23, будут формироваться дисководом при обнаружении указанных типов ошибок.
Сообщения об Ошибках Записи: В данном разделе описана логика, используемая программным обеспечением для определения того, когда установить конкретную комбинацию опознавания, когда сформировать сообщение об ошибке посредством Условия Проверки и когда осуществить возврат данных (см. схему 14 в конце описания).
Коды Ошибок Проверки После Записи: В данном разделе представлены условия, которые обеспечивают формирование в дисководе сообщения о статусе, которое может быть передано в главный компьютер при выполнении проверки после операций записи. Будет ли действительно передано сообщение о статусе, зависит от того, выдал ли главный компьютер SCSI Команду Опознавания Запроса.
Условия могут быть разделены на четыре основных категории, которые включают следующее: 1) попытки определить местоположение требуемого сектора, 2) попытки верифицировать данный сектор, 3) попытки перераспределить сектор, 4) Прерывания Дисковода и другие серьезные ошибки. Таблица 18, содержащая Коды Ошибок при перераспределении сектора, представляет комбинации опознавания, сообщения о которых формируются при неудаче перераспределения, а таблица 8 содержит комбинации опознавания для серьезных ошибок.
При попытках определения местоположения требуемого сектора дисковод будет обеспечивать формирование комбинаций опознавания, перечисленных в таблице 19, при обнаружении указанных типов ошибок. При попытках верификации сектора дисковод будет формировать комбинации опознавания, указанные в таблице 20, при обнаружении ошибок указанного типа.
Сообщения об Ошибках Верификации После Записи: В данном разделе описана логика, которую использует программное обеспечение, для определения того, когда необходимо установить определенную комбинацию опознавания, когда сформировать сообщение об ошибке посредством Условия Проверки и когда осуществить возврат данных (см. схему 15 в конце описания).
Дефектные Области Управления: Этот раздел подлежит определению. Дальше представлены замечания и вопросы, которые необходимо учесть при определении этого раздела. Считывание Дефектных Областей Управления (DMA): Какие пороги следует использовать при проектировании. Сколько повторных попыток необходимо использовать. Сравнение/Обновление DMA. Какое количество должно быть кондиционным. Когда их можно перезаписать. Уведомление о приближении конца срока службы и о конце срока службы. Каждый из этих вопросов решается при проектировании и не будет оказывать влияния на специалистов при осуществлении ими на практике настоящего изобретения в том виде, как оно здесь раскрыто. Структуры данных, образующих DMA, для поддержки включают Сужение Сектора, Линейную Замену.
Таблицы Просмотра для Различных Носителей: Программное обеспечение будет загружать в ЦПС соответствующую таблицу скоростей для типа носителя, который установлен в дисководе. Устанавливаемая по умолчанию (т.е. консервативная) таблица скоростей будет использоваться до тех пор, пока не определен тип носителя.
ИНТЕРФЕЙС КОМАНД ДИСКОВОДА: Интерфейс Команд Дисковода представляет собой программный интерфейс, который обеспечивает доступ к платформе аппаратных средств дисковода. Доступ к SCSI интерфейсу, к Контроллеру Последовательности Форматирования, Кодеку и Внешнему Кодеку обеспечивается как прямой доступ к этим компонентам, а не через Интерфейс Команд Дисковода. Доступ ко всем другим компонентам обеспечивается с использованием Интерфейса Команд Дисковода, определяемого в последующем разделе.
Команды Дисковода: Команды Дисковода, используемые Программным обеспечением Jupiter, перечислены в таблице 24 ниже. Столбец "тип" определяет, является ли Команда Дисковода командой немедленного действия (I), командой, выполняемой блоком 80С188 (188), или командой, выполняемой ЦПС (ЦПС). Команда Немедленного Действия использует флаг или установленный бит и не требует времени ЦП для обработки или контроля операции. Команда Немедленного Действия индицирует то, что команда является выполняемой немедленно полностью. В разделе Выполнение Команд Дисковода представлены дополнительные сведения по этому вопросу. Тип Команды 188 индицирует, что требуется дополнительная обработка, осуществляемая блоком 80С188, для удовлетворения запроса. Дополнительный контроль может потребоваться для подтверждения того, что аппаратные средства достигли требуемого состояния. Команда указывается как завершенная, если обработка или контроль завершены. Тип Команды ЦПС указывает, что команда должна посылаться на ЦПС для удовлетворения требований Команды Дисковода. Команда указывается как завершенная, когда ЦПС возвращает сообщение о статусе его команды.
Команды Дисковода представляют собой команды из одного или двух слов, которые запрашивают, чтобы определенная функция была выполнена блоком 80С188 или пропущена на ЦПС. Код Команды Дисковода обеспечивает поддержание протокола взаимодействия с ЦПС и определение того, когда команда закончена. В некоторых случаях, когда блок 80С188 выполняет определенную функцию, команда незамедлительно идентифицируется как незавершенная. В других случаях требуется задержка на время установления аппаратных средств (например, в случае включения магнита смещения). В случае, когда блок 80С188 передает команду выполнения функций на ЦПС, блок 80С188 должен ожидать, пока ЦПС укажет завершение команды. Детальные сведения о выполнении команд содержатся ниже в соответствующем разделе Выполнение Команд Дисковода. Верхнее слово в командах из двух слов помещается в переменную esdi_cmd. Нижнее слово помещается в переменную esdi_cmd2. Команда, использующая одно слово, использует переменную esdi_cmd. Эти переменные являются глобальными переменными и должны устанавливаться перед вызовом функции Drive_cmd.
Описание Команд Дисковода: В следующих подразделах содержится детальное описание Команд Дисковода.
SET_EE_ADDR: Команда Установки Адреса ЭСППЗУ используется для идентификации адреса для следующей операции с использованием энергонезависимого ЗУПВ. Сначала устанавливается адрес, затем следует команда READ_EEPROМ или WRITE_ EEPROM, как описано ниже.
READ_ EEPROM: Команда считывания из ЭСППЗУ позволяет считать данные, запомненные в настоящее время в энергонезависимом ЗУПВ, из ячейки, ранее определенной с использованием команды SET_EE_ADDR.
SET_ JUMP_ BACK_ IN: Команда установки переходов к внутреннему диаметру определяет для ЦПС, что носитель раскручивается по спирали к внутреннему диаметру и поэтому переход должен выполнять поиск по одной дорожке в направлении внутреннего диаметра. Переход выполняется однократно на один оборот для поддержания оптической системы над той же самой физической дорожкой.
SET_JUMP_BACK_OUT: Команда установки переходов к внешнему диаметру определяет для ЦПС, что носитель раскручивается по спирали к внешнему диаметру и поэтому переход должен выполнять поиск по одной дорожке в направлении внешнего диаметра. Переход выполняется однократно на один оборот для поддержания оптической системы над той же самой физической дорожкой.
JUMP_BACK_ENABLE: Команда разрешения переходов информирует ЦПС, что переходы должны выполняться для поддержания текущего положения оптической головки над носителем.
JUMP_ BACK_ DISABLE: Команда запрета переходов информирует ЦПС, что переходы не должны выполняться и что оптическая головка должна отслеживать по спирали положение носителя.
DISABLE_EEWR: Данный раздел в настоящее время не определен.
REQ_STATUS: Команда запроса статуса запрашивает текущий статус от ЦПС.
SET_ LASER_ THOLD: Команда установки порога считывания лазера определяет допустимый диапазон сигнала мощности считывания лазера. Если мощность считывания превысит порог, то ЦПС выдает прерывание преждевременного прекращения.
SET_ FOCUS_ THOLD: Команда установки порога фокусировки устанавливает допустимый диапазон сигнала ошибки фокусировки. Если сигнал ошибки фокусировки превысит порог, ЦПС формирует прерывание преждевременного прекращения.
SET_TRACK_HOLD: Команда установки порога трекинга устанавливает допустимый диапазон сигнала ошибки трекинга. Если сигнал ошибки трекинга превысит порог, ЦПС формирует прерывание преждевременного прекращения.
SET_SEEK_THOLD: Данный раздел в настоящее время не определен.
SET_ SPIH_ THOLD: Скорость шпинделя необходимо контролировать, чтобы обеспечить то, чтобы данные были записаны на носителе и могли быть позже воспроизведены. Скорость шпинделя контролируется с помощью ЦПС с учетом минимального и максимального об/мин, согласно этой команде. Если скорость шпинделя упадет ниже минимума или превысит максимум, то ЦПС генерирует прерывание преждевременного прекращения.
Функция контроля позволяет интерфейсу Команд Дисковода обнаруживать, когда кассета приведена во вращение с требуемой скоростью, а также когда кассета не может сохранять корректную скорость. Путем установки минимального числа об/мин на 0, а максимального - на нижнее значение об/мин для номинального диапазона носителя, ЦПС сформирует прерывание для блока 80С188, когда кассета реально достигнет установленной скорости. После этого блок 80С188 выдает на ЦПС новый диапазон, определяющий минимальное и максимальное число об/мин для номинального диапазона носителя. Минимальное число об/мин, равное 0, показывает, что для минимального значения не требуется выполнения проверки.
BIAS_ TEST: Команда проверки смещения требует проверки магнита смещения. Реальные операции, осуществляемый при проверке, описаны ниже в разделе В. Определение проверки при включении питания, проверка магнита смещения.
READ_ DSP_ REV: Команда считывания с ЦПС Пересмотра Программного Обеспечения требует предоставления уровня пересмотра программного обеспечения от ЦПС.
WRITE_ EEPROM: Команда Записи В ЭСППЗУ записывает байт данных в энергонезависимое ЗУПВ в ячейку, предварительно определенную, с использованием команды SET_EE_ADDR, как описано выше.
REQ_ STD_ STAT: Команда запроса стандартного статуса запрашивает стандартный статус ESDI. Стандартный статус включает статус для дисковода и статус для ЦПС.
REC_OPT_STAT: Команда запроса оптического статуса запрашивает оптический статус ESDI. Этот статус включает статус для дисковода и статус для ЦПС.
SET_ MAG_ READ: Команда установки магнита для считывания подготавливает дисковод к операции считывания. Команды смещения описаны ниже в разделе Магнитное Смещение, Лазерная Мощность, Управление Частотой Фазоследящей Цепи.
SET_ MAG_ ERASE: Команда установки магнита для стирания подготавливает дисковод для операции стирания. Команды смещения описаны ниже в разделе Магнитное Смещение, Лазерная Мощность, Управление Частотой Фазоследящей Цепи.
SET_ MAG_ WRITE: Команда установки магнита для записи подготавливает дисковод для операции записи. Команды смещения описаны ниже в разделе Магнитное Смещение, Лазерная Мощность, Управление Частотой Фазоследящей Цепи.
RESET_ ATTN: Команда сброса прерывания указывает ЦПС на необходимость сброса битов статуса, которые он установил для индикации условий ошибки, которые сформировали Прерывание Дисковода для блока 80С188.
RECAL_DRIVE Данный раздел в настоящее время не определен.
STOP_ SRINDLE: Команда остановки шпинделя размыкает следящие цепи и замедляет вращение кассеты. Код Команды Дисковода сначала указывает ЦПС на необходимость размыкания следящих цепей лазера, систем фокусировки и трекинга. Число об/мин шпинделя устанавливается на нуль и прикладывается торможение. Спустя несколько секунд (TBD) торможение снимается и программное обеспечение проверяет, что число об/мин шпинделя снизилось до определенного значения (TBD). После этого программное обеспечение повторно прикладывает торможение, выдерживаемое в течение нескольких мс (TBD) до остановки кассеты. Время ожидания от исходной скорости вращения до ее замедления и время ожидания до полной остановки шпинделя будут зависеть от материала кассеты - пластмасса или стекло. Программное обеспечение будет контролировать время до раскручивания кассеты, чтобы определить тип используемого носителя. Команда SET_ SPIN_THOLD будет использоваться для контроля скорости вращения шпинделя.
START_SPINDLE: Команда запуска шпинделя обеспечивает раскручивание кассеты, подтверждение того, что кассета достигла требуемого числа об/мин, и затем запрос ЦПС о выполнении его инициализации для кассеты. Контроль числа об/мин шпинделя выполняется с использованием команды SET_SPIN_THOLD, как указано выше.
Раскручивание осуществляется в два этапа: 1) Устанавливается порог шпинделя для контроля числа об/мин до тех пор, пока кассета не достигнет минимального числа об/мин для конкретного носителя, 2) Порог шпинделя устанавливается для контроля числа об/мин в соответствии с номинальным диапазоном для носителя. Если раскручивание кассеты происходит слишком долго, то программное обеспечение должно остановить вращение кассеты и сформировать код ошибки (TBD). Дисковод не должен выталкивать кассету.
Для измерения времени, требуемого до достижения носителем четырехкратного устанавливаемого по умолчанию числа об/мин, должен использоваться таймер. Время, требуемое для раскрутки кассеты, будет указывать на материал носителя - пластмасса или стекло. После идентификации команды STOP_SPINDLE будет использовать соответствующую блокировку по времени, основанную на типе кассеты.
После достижения кассетой установленного числа об/мин программное обеспечение будет выдавать на ЦПС команду инициализации. В этот момент ЦПС будет осуществлять замыкание своих следящих цепей.
LOCK_CART: Команда захвата кассеты устанавливает флаг, который обеспечивает то, что любые последующие запросы выталкивания кассеты будут отклонены.
UNLOCK_ CART: Команда освобождения кассеты снимает флаг и обеспечивает то, что последующие запросы выталкивания кассеты будут учитываться.
EJECT_CART: Команда выталкивания кассеты замедляет кассету, если она еще находится во вращении для выталкивания кассеты. Операции, осуществляемые для замедления кассеты, те же самые, что и выполняемые в случае команды STOP_ SPINDLE, как описано выше. После осуществления замедления программное обеспечение выдает команду выталкивания кассеты на ЦПС.
SEEK_COMP_OFF: Данный раздел в настоящее время не определен.
SEEK_COMP_ON: Данный раздел в настоящее время не определен.
SLCT_ GCR_FRQ_SET: Команда выбора набора частот определяет набор частот. Каждый формат носителя требует различного набора частот для записи на носитель. Команда магнита смещения, см. ниже, используется для выбора частоты из набора, идентифицируемого этой командой.
ALLOW_ATTN_CLEAR: Данный раздел в настоящее время не определен.
READ_DRV_RAM: Данный раздел в настоящее время не определен.
NORMAL_PLL_BWIDTH: Данный раздел в настоящее время не определен.
HGH_PLL_BWIDTH: Данный раздел в настоящее время не определен.
VHGH_PLL_BWIDTH: Данный раздел в настоящее время не определен.
SET_ LWP_ RAM: Команда установки мощности записи лазера в ЗУПВ устанавливает мощность записи в соответствии с определенной зоной лазерной мощности. Эта команда позволяет дисководу при диагностике модифицировать мощность записи, которая должна будет использоваться в следующих операциях стирания или записи, выполняемых в определенных зонах мощности.
SEEK_BACKWARD: Формат для Команды Поиска в Обратном Направлении представлен ниже, в разделе Команда Поиска.
SEEK_FORWARD: Формат для Команды Поиска в Прямом направлении представлен ниже, в разделе Команда Поиска.
Команда Поиска: Формат для команды поиска из двух слов представлен ниже в таблице 25.
Для Команды Поиска "OD" определено как направление к внешнему диаметру или от шпинделя, a "ID" - как направление к внутреннему диаметру или к шпинделю. Пороги для ЦПС, предназначенные для использования при поиске, должны устанавливаться отдельно до выдачи команды поиска. Пороги поиска устанавливаются с использованием команды SET_SEEK_THOLD.
Команды Магнитного Смещения, Лазерной Мощности и Частоты Фазоследящей цепи: Команда Смещения обеспечивает установку аппаратных средств, обеспечивающих возможности дисковода считывать, стирать или записывать в конкретное положение на носителе. Формат для Команды Смещения из одного слова представлен в Таблице 26 ниже.
Для считывания, стирания или записи в конкретное место на носителе код Команды Дисковода должен устанавливать магнитное смещение, уровни мощности записи лазера (для 2х- и 4х-носителей), частоту фазоследящей цепи и пороги ЦПС для фокусировки и трекинга. Когда команда состоит в подготовке к операциям стирания или записи, код Команды Дисковода должен также проверять, что магнитное смещение формирует ток в пределах определенных значений (TBD) за определенный интервал времени (TBD). Последовательный АЦП должен использоваться для дискретизации тока, который создан магнитом смещения. Пороги ЦПС для фокусировки и трекинга, которые должны использоваться при считывании, стирании или записи, должны устанавливаться по отдельности до проведения указанных операций. Для установления этих порогов используются команды SET_FOCUS_THOLD и SET_TRACK_THOLD.
Имеется только одна полоса частот для носителей типа 1х и отсутствуют Зоны Лазерной Мощности для Записи, поскольку Запись не поддерживается для носителей типа 1х. Число Зон Лазерной Мощности для Записи для носителей типа 2х равно числу полос (т.е. 16 зон). Число Зон Лазерной Мощности для Записи для носителей типа 4х равно числу полос (т.е. 30 полос для носителей, отформатированных с секторами по 512 байт, и 34 полосы для носителей, отформатированных с секторами по 1024 байт).
Статус Команд Дисковода: Статус, предоставляемый с интерфейса Команд Дисковода, основывается на модифицированном ESDI интерфейсе, как используется для продуктов серии RMD-5000. Биты статуса отражают действительное состояние аппаратных средств, условия ошибок с ЦПС или состояние, управляемое программным обеспечением. Статус предоставляется в двух 16-битовых словах, обычно определяемых как Стандартный Статус и Оптический Статус. Определение слов статуса и источника статуса представлено в таблице 27 - Стандартный Статус ESDI и в таблице 28 - Оптический Статус.
Последовательный Интерфейс Управления Дисководом: Интерфейс Команд Дисковода обеспечивает общий механизм программирования различных последовательных устройств в аппаратных средствах Jupiter. Последовательные устройства выбраны для управления электродвигателем шпинделя, АЦП, компонентами канала считывания, энергонезависимым ЗУПВ (ЭЗУПВ). Последовательный интерфейс является прозрачным для программного обеспечения. Программное обеспечение Команд Дисковода обеспечивает определение того, как взаимодействовать с каждым таким устройством для запуска шпинделя, считывания тока смещения на АЦП, считывать или записывать данные в определенную ячейку ЭЗУПВ и т.д. Важно, что программное обеспечение Команд Дисковода отменяет все сделанные выборы для последовательных микросхем для прерывания любой предшествующей операции, которая может еще осуществляться.
Вопрос, требующий рассмотрения: Все прерывания должны блокироваться, если выполняется последовательный доступ. Блокировка прерываний должна обеспечиваться на интервал от 100 мкс до 1 мс.
Интерфейс Обмена Данными 80С188/ЦПС: Команды для ЦПС и их функции определены в документе DSP-COMM.DOC, 80C188/TMS320C5X, Rev XGH-August 25, 1994. Для удобства команды перечислены в таблице 29 - Команды ЦПС.
Определения Статуса ЦПС: В таблице 30 представлены определения бит для байтов статуса ЦПС. В таблице 30 также показано, как каждый бит переводится в бит Стандартного Статуса ESDI или Оптического Статуса ESDI.
Выполнение Команд Дисковода: Фаза команды и статуса в Команде Дисковода отделены, чтобы обеспечить программному обеспечению 80С188 гибкость в продолжении обработки при выполнении ЦПС команды. После этого программное обеспечение 80С188 может ожидать завершения команды. Обычно требуется только, чтобы две последовательные команды не вызывали переполнения. Поэтому в начале каждой Команды Дисковода программное обеспечение должно проверить, что предыдущая команда закончена, а если нет, то ожидать определенный интервал времени (TBD) перед блокировкой по времени.
Команды для ЦПС разделяются на различные категории, которые требуют различных блокировок по времени. Доступ к памяти должен завершаться за 500 мкс. Короткий поиск должен завершаться за 2 мс, а длительный поиск - за 100 мс. Инициализация ЦПС должна требовать до 2 с.
Программное обеспечение Команд Дисковода должно также контролировать блокировки по времени для аппаратных средств, т.е. оно непосредственно обеспечивает управление такими компонентами, как магнит смещения и компоненты Канала Считывания. Магнит смещения может потребовать до 4,5 мс для достижения требуемой напряженности поля. Задержка на установление в Канале Считывания может составить (TBD) мкс.
ПОДДЕРЖКА 20-ШТЫРЕВОГО СОЕДИНИТЕЛЯ ДИСКОВОДА: В данном разделе описаны действия, предпринимаемые дисководом Jupiter в ответ на различные сигналы с 20-штыревого соединителя дисковода. Отсутствуют тесты в программном обеспечении для определения факта подключения кабеля дисковода. Все сигналы должны выдаваться и отменяться на интерфейсе дисковода независимо от того, подключен ли кабель или нет.
Выталкивание Кассеты с Проигрывателя-автомата: Когда выдается сигнал AC_ EJECT на 20-штыревой соединитель, дисковод будет прерывать любую текущую операцию и переносить все данные в кэше записи на носитель. Если кассета вращается, программное обеспечение будет выдавать Команду Дисковода о замедлении вращения кассеты. После того как дисковод подтвердит, что кассета остановилась (такой способ должен быть дополнительно определен), дисковод сформирует Команду Дисковода для выталкивания кассеты.
Сброс с Проигрывателя-автомата: (Вопрос предстоит решить) Когда сигнал AC_RESET выдается на 20-штыревой соединитель, дисковод не будет больше выдавать новых команд. Те команды, которые упорядочены в очередь, будут обслужены до завершения. Любые данные в кэше записи будут подавлены. Как только дисковод завершит вышеуказанную функцию, он будет ожидать отмены сигнала сброса с проигрывателя-автомата перед завершением инициализации SCSI, как описано выше.
Кассета в Дисководе: Сигнал CART_IN_DRIVE на 20-штыревом соединителе будет поддерживаться в неподтвержденном состоянии, независимо от того, имеется ли кассета в дисководе. Для этого сигнала не обеспечивается поддержка программным обеспечением. Прерывание возможно от Внешнего Кодека. Однако отсутствует датчик для формирования сигнала о нахождении кассеты в горловине дисковода.
Кассета Загружена: Сигнал CART_LOADED на 20-штыревом соединителе будет выдан, когда кассета присутствует, установлена на втулку, вращается и ЦПС завершил инициализацию (включая фокусировку и трекинг).
Ошибка: Сигнал ERROR на 20-штыревом соединителе будет выдаваться, если имеет место ошибка последовательности выталкивания кассеты. В настоящее время не определен способ для программного обеспечения, как обнаружить ошибку загрузки или выгрузки кассеты без использования соответствующего датчика определения нахождения кассеты в горловине.
Канал Светодиода: Сигнал LED_PIPE на 20-штыревом соединителе будет выдаваться всякий раз, когда имеет место свечение светодиода.
Запрос Понижения Мощности: Когда выдан сигнал PWRDNREQ на 20-штыревом соединителе, дисковод будет завершать любую команду записи, находящуюся в процессе исполнения, и затем переносить данные, находящиеся в кэше записи/буфере записи, на носитель.
Подтверждение Понижения Мощности: Когда кэш записи подавляется в ответ на сигнал Запроса Понижения Мощности, дисковод будет выдавать сигнал PWRDNACK (подтверждения) на 20-штыревой соединитель.
Автономный/от Проигрывателя-автомата: Дисковод может определять, присоединен ли 20-штыревой соединитель, путем восприятия уровня этого сигнала на интерфейсе дисковода. Если сигнал имеет высокий уровень, то дисковод находится в автономном режиме, если сигнал имеет низкий уровень, то 20-штыревой соединитель подсоединен к дисководу.
ОПЕРАЦИИ ДИСКОВОДА: ЭЗУПВ: В дисководе Jupiter будет использовано ЭЗУПВ. Некоторые параметры дисковода (например, установки лазерной мощности и информация от изготовителя комплектного оборудования) будут заказными и запомненными в ЭЗУПВ. Если впоследствии ЭЗУПВ будет исключено из конструкции, то параметры будут записаны в "флэш" - память.
Отказы Питания: Любой отказ питания 5 В или 12 В будет формировать сброс аппаратных средств, передаваемый в блок 80С188.
Калибровка Смещения Фокусировки для носителей типов 1х и 2х: ЦПС будет выполнять калибровку фокусировки для носителей 1х и 2х, оптимизируя наилучший радиальный двуполярный (RPP) сигнал.
Калибровка Смещения Фокусировки для носителей типа 4х: Этот раздел предстоит дополнительно определить. Ниже изложены замечания и вопросы, которые следует учесть при определении этого раздела. Калибровка фокусировки для носителей 4х выполняется в два этапа. Первый этап калибровки выполняется ЦПС, при этом оптимизируется наилучший RPP сигнал, как при калибровке фокусировки для носителей 1х и 2х. Второй этап калибровки фокусировки для носителей 4х будет оптимизировать наилучшее отношение сигнал/шум. Это требует того, чтобы блок 80С188 записывал и считывал комбинации данных, выбирал наилучшее смещение и подавал его на ЦПС.
Блок 80С188 будет выдавать команды в ЦПС использовать конкретное смещение фокусировки и затем записывать 2Т-комбинацию данных в сектор. Сектор считывается, и примерно за 100 мкс последовательный АЦП должен обеспечить значение для "выборки и хранения". Эта процедура повторяется для различных смещений фокусировки до определения оптимального значения. Конкретный алгоритм такой обработки предстоит определить дополнительно. Окончательное значение затем передается на ЦПС.
Калибровка Мощности Записи для носителей типа 2х: Данный раздел подлежит дополнительному определению. Ниже представлены замечания и вопросы, которые должны быть учтены при последующем определении этого раздела. Блок 80С188 будет выполнять калибровку мощности записи с использованием определенного алгоритма (TBD).
Калибровка Мощности Записи для носителей 4х (Проверка предварительной записи): Этот раздел предстоит определить дополнительно. Ниже представлены замечания и вопросы, которые должны быть учтены. Необходимо определить, когда следует выполнять тестирование предварительной записи: 1) температура установлена, проверка всех зон, 2) температура установлена, если только зона будет затем использована, 3) каждый раз, когда записывается новая зона, 4) какой-либо другой алгоритм. Кроме того, дорожки предварительной записи должны иметь заголовки. Каждый из этих вопросов является фактором проектирования и не будет препятствовать специалистам при практическом осуществлении изобретения в том виде, как оно здесь раскрыто.
Процедура калибровки мощности записи для носителей типа 4х подобна процедуре для определения смещений фокусировки для носителей 4х. Блок 80С188 обеспечивает запись последовательностей секторов при изменении уровней мощности записи для WR1. Может оказаться необходимым пропустить один или два сектора при выполнении установки для следующей записи. После того как использован диапазон значений, блок 80С188 считывает те же сектора и использует последовательный АЦП для оцифровки считанного сигнала. Основываясь на определенном алгоритме (TBD), может быть получен оптимальный уровень мощности записи.
Важно отметить, что эта последовательность должна быть прерываемой и восстанавливаемой. Если новая SCSI команда получена при осуществлении алгоритма, то дисковод должен своевременно реагировать на команду и возвращаться к проверке с предварительной записью в последующий момент времени.
Если дисковод выполняет проверку с предварительной записью, и получена новая SCSI команда записи, то дисковод должен 1) прервать проверку с предварительной записью и выполнить команду записи с использованием прежних уровней записи, или 2) продолжать проверку с предварительной записью для определения новых уровней мощности записи, тем самым увеличивая непроизводительные расходы на выполнение этой команды. Каждый из этих возможных вариантов представляет собой факторы проектирования и не будет препятствовать специалистам практически осуществлять изобретение в том виде, как оно здесь раскрыто.
Повторная калибровка: Данный раздел предстоит определить дополнительно. Ниже представлены замечания и вопросы, которые следует учесть: когда осуществлять повторную калибровку, что делать при этом, контроль температуры, как часто, каков должен быть подъем температуры, чтобы вызвать необходимость в повторной калибровке. Что подлежит калибровке и повторной калибровке. Когда дисковод должен калиброваться повторно. Является ли калибровка и повторная калибровка одним и тем же процессом. Следует ли осуществлять повторную калибровку при текущем изменении рабочих параметров лазера. Каждый из этих вопросов является фактором проектирования и не будет препятствовать специалистам при практическом осуществлении изобретения в том виде, как оно здесь раскрыто.
Калибровка ЦПС включает установку Смещения Фокусировки и смещение RPE. Имеются два алгоритма калибровочной фокусировки. Какой из них использовать, необходимо определить дополнительно. Повторная калибровка должна выполняться в функции от температуры или в виде процедуры восстановления ошибки. При каждом нарастании температуры на 5-10 градусов будут калиброваться Смещение Фокусировки, Смещение RPE и Мощность Записи Лазера. Такая повторная калибровка должна выполняться, когда ничего нет в текущей обработке. Процессе осуществления повторной калибровки должен прерываться с приходом SCSI команд. Если система остается занятой в течение продолжительного периода времени, то в конечном счете повторная калибровка должна иметь приоритет. Повторную калибровку не следует осуществлять при каждом изменении мощности считывания лазера.
Поддержка "флэш" - ЭСППЗУ: Команда SCSI для Буфера Записи будет использоваться для загрузки нового программного обеспечения SCSI в дисковод. Дисковод не будет оставаться в работоспособном состоянии при сбросе или циклировании мощности, которые могут произойти при обновлении данных "флэш" - ЭСППЗУ. Важно довести это обстоятельство для сведения конечного пользователя, который будет пытаться выполнять обновление программного обеспечения: нельзя осуществлять циклирование мощности или сброс при процедуре загрузки. Если это произойдет, то дисковод необходимо будет возвратить на завод для его ремонта.
Требования изготовителя: Этот раздел подлежит дополнительному определению. Ниже изложены вопросы и замечания, которые следует учесть
при таком определении. Поддержка Буферного ЗУ трасс (как и для RMD-5300 является фактором проектирования).
Кэш опережающего считывания: Этот раздел следует определить дополнительно. Ниже представлены вопросы и замечания, которые должны быть определены при этом. Объем памяти, предназначенный для использования в частях для записи и для считывания кэша, будет установлен в Страницах Режимов. См. ниже.
Кэш записи: Данный раздел следует определить дополнительно. Ниже изложены вопросы и замечания, которые необходимо учесть. Объем памяти, предназначенный для использования в частях для записи и для считывания кэша, будет установлен в Страницах Режимов. Должно поддерживаться своевременное подавление. Немедленное оповещение. Переупорядочивание Записи. Каждый из этих вопросов является фактором проектирования и не будет препятствовать специалистам при практическом осуществлении изобретения, как оно здесь раскрыто.
Выполнение SCSI команд: Этот раздел должен быть определен дополнительно. Ниже изложены вопросы и замечания, которые следует учесть. Объединение множества SCSI команд в единый запрос для носителя. Разделение поиска на предварительный и окончательный. Алгоритмы занятости шины: Коэффициент Незанятости для Буферного Зу при записи. Коэффициент Заполненности Буферного ЗУ при считывании. Это является факторами проектирования.
Часы Включения Питания: Количество часов включенного питания дисковода будет храниться в ЭЗУПВ. Для накопления отсчета часов включения питания ЦПС будет осуществлять прерывание для 80С188 каждые 10 секунд
19 - 19
(2•20 мкс). Блок 80С188 будет обновлять часы включения 2•20 мкс и запоминать полное значение в ЭЗУПВ. Если дисковод обнаружит ошибку, 80С188 может запросить текущее значение часов ЦПС. Только нижние 19 разрядов используются и будут добавляться к часам включения, давая относительную метку времени для ошибочного события. Замечание: 1) Время, прошедшее при инициализации до снятия сброса с ЦПС не включается. Это время может прибавляться каждый раз к времени включения питания дисковода. 2) Время, оставшееся до следующего 10-секундного интервала (примерно 5 секунд) может добавляться к каждому времени включения питания дисковода.
Очистка линзы: Как только определено, что линза должна быть очищена, в следующий раз, когда дисковод будет выталкивать кассету, исполнительный механизм будет установлен в соответствующее положение, и выталкивание кассеты будет заставлять щетку проходить около линзы. Когда кассета будет выходить из горловины, исполнительный механизм будет перемещаться в соответствующее положение. Предстоит решить следующие вопросы: 1) Что, если кассета останется в горловине, 2) Когда наиболее надежно перемещать исполнительный механизм в его исходное состояние, 3) Будет ли линза повреждена, если исполнительный механизм переместится в некорректное положение в ходе этой процедуры. Каждый из этих вопросов является фактором проектирования и не будет препятствовать специалистам при осуществлении настоящего изобретения в том виде, как оно раскрыто.
Характеристики программного обеспечения: Данный раздел должен быть определен дополнительно. Ниже представлены вопросы и замечания, которые следует учесть при определении. Идентифицировать минимальное число секторов для конкретного числа оборотов в минуту носителя. Использовать стратегию для множества секторов на прерывание. Идентифицировать критические области Программы Обслуживания Прерываний.
Запрос Выталкивания Кассеты с Передней Панели: Данный раздел должен быть определен дополнительно. Ниже изложены замечания и вопросы, которые должны быть учтены при таком определении. Будет ли это прерывать текущую команду. Будет ли содержимое кэша сначала записываться на носитель. Каждый из этих вопросов является фактором проектирования и не будет препятствовать специалистам при практическом осуществлении изобретения, как оно здесь раскрыто.
SCSI Команда Выталкивания Кассеты: Данный раздел должен быть определен дополнительно. Ниже изложены замечания и вопросы, которые должны быть учтены при последующем определении. Должно ли обеспечиваться всегда выталкивание, даже если Переключатель Присутствия Кассеты индицирует, что кассета отсутствует. Следует ли это блокировать посредством соответствующей кнопки выбора. В дисководе может быть желательно, чтобы главный компьютер имел возможность сам непосредственно осуществлять выталкивание кассеты или не имел такой возможности. Каждый из этих вопросов является фактором проектирования и не должен препятствовать специалистам практически осуществлять изобретение в том виде, как оно здесь описано.
Кнопки Выбора: Данный раздел должен быть определен дополнительно. Ниже изложены вопросы и примечания, которые должны быть учтены при определении. Разрешение/Блокировка жесткого сброса по сигналу сброса Шины SCSI. (Должен быть передан для сброса аппаратных средств в случае разрешения). Разрешение/Блокировка SCSI завершения. Разрешение/Блокировка автоматической проверки после записи. Разрешение/Блокировка программирования "флэш" - памяти для обновлений SCSI программного обеспечения. Разрешение/Блокировка выталкивания кассеты по SCSI команде. Резервирование (количество - TBD).
А. ТРЕБОВАНИЯ К ПРОГРАММНОМУ ОБЕСПЕЧЕНИЮ: В данном разделе содержатся требования к программному обеспечению, использованные для составления Функциональных Характеристик Программного Обеспечения.
1.Диагностика
1) Поддержка последовательного обмена данными для диагностики.
2) Поддержка последовательного обмена данными для обеспечения доступа к новым аппаратным средствам.
3) Разработка диагностики самокалибровки при включении питания для новых микросхем и аппаратных средств: RLL(1,7)-кодека, СЛС, ЭЗУПВ, Канала считывания, электродвигателя шпинделя, последовательного АЦП, параллельного ЦАП.
4) Скорость шпинделя электропривода должна быть изменяемой по команде SCSI.
2. Наращивание программного обеспечения
1) Поддержка "флэш" - ЭСППЗУ для SCSI программного обеспечения.
2) Новое программное обеспечение (SCSI и/или ЦПС) должно быть загружаемым посредством SCSI.
3) Операция загрузки программного обеспечения должна быть восстанавливаемой.
3. Поддержка ЦПС
1) Должна обеспечиваться загрузка кода ЦПС с ЭСППЗУ SCSI.
2) Должна обеспечиваться поддержка Интерфейса Обмена Данными, обеспечивающего обмен командами, статусами, данными.
3) Должна обеспечиваться поддержка ЦПС на основе ПЗУ.
4) Должны поддерживаться различные таблицы скорости для различных форматов носителей.
4. 20-штыревой соединитель
1) Программное обеспечение должно обеспечивать возможность обнаружения факта присоединения 20-штыревого соединителя.
2) Программное обеспечение должно обеспечивать возможность считывания фиксированных значений для следующих сигналов 20-штыревого соединителя: Сброс с Проигрывателя-автомата, Запрос Снижения Мощности с Проигрывателя-автомата, Выталкивание кассеты с Проигрывателя-автомата, идентификатор SCSI, Разрешение проверки по четности SCSI.
3) Программное обеспечение должно обеспечивать возможность считывания текущего состояния Сброса с Проигрывателя-автомата (не зафиксированного).
4) Программное обеспечение должно принимать команду прерывания при выдаче на 20-штыревой соединитель следующих сигналов: Сброс с Проигрывателя-автомата, Запрос Снижения Мощности, Выталкивание Кассеты с Проигрывателя-автомата.
5) Программное обеспечение должно обеспечивать возможность выдавать/отменять следующие сигналы 20-штыревого соединителя: CART_IN_DRIVE, CART_LOADED, ERROR, PWRDNACK (Подтверждение Снижения Мощности).
6) При выдаче на 20-штыревой соединитель сигнала PWRDNREQ 1) кэш записи подавляется и 2) выдается команда PWRDNACK.
5. SCSI инициализация
1) Программное обеспечение SCSI инициализации должно использовать 20-штыревой соединитель в качестве источника SCSI идентификатора (ID) дисковода. Когда кабель подсоединен, сигналы будут управляться дисководом, когда кабель не подсоединен, те же штыри будут иметь перемычки, установленные так, чтобы индицировать используемый SCSI ID.
2) Программное обеспечение SCSI инициализации должно использовать 20-штыревой соединитель в качестве источника SCSI Разрешения Проверки по четности. Когда кабель присоединен, то сигнал будет управляться дисководом. Когда кабель не присоединен, то тот же самый штырь будет иметь перемычку, установленную так, чтобы индицировать, должна ли быть разрешена SCSI проверка по четности.
3) Дисковод должен поддерживать пользовательский выбор оконечной нагрузки.
6. Сброс
1) Если выдан сигнал Сброса SCSI Шины, то будет формироваться INT3 для 80С188.
2) Если выдан сигнал Сброса с Проигрывателя-автомата, то формируется прерывание для блока 80С188.
3) Если выдан сигнал Сброс с Проигрывателя-автомата, Программа Обслуживания Прерываний INT3 должна определять исходя из состояния кнопки выбора, должен ли выполняться жесткий или программируемый сброс. Если должен выполняться программируемый сброс, то Программа обслуживания прерываний INT3 уведомляет Задачу Монитора, что произошел сброс и что содержимое кэша записи должно быть подавлено.
4) Если Проигрыватель-автомат выдал команду Сброса во время последовательности включения питания, то дисковод а) должен игнорировать команду выталкивания кассеты с Проигрывателя-автомата и в) должен ожидать отмены Сброса с Проигрывателя-автомата перед выполнением SCSI инициализации.
5) Проигрыватель-автомат должен выдавать Сброс Проигрывателя-автомата в любой момент для изменения SCSI ID дисковода.
7. Поддержка Канала Считывания
1) Программное обеспечение должно устанавливать Канал Считывания для текущего типа операции считывания.
8. Поддержка Канала Записи
1) Программное обеспечение должно инициировать процесс для дискретизации сигналов с Канала Считывания для секторов, использованных для проверки с предварительной записью.
2) Программное обеспечение должно определять оптимальный Уровень Мощности Записи для текущей частотной зоны и текущей температуры дисковода.
3) Программное обеспечение должно посылать команду Смещения Фокусировки на ЦПС для носителя типа 4х.
9. Поддержка Команд Дисковода
1) Интерфейс Команд Дисковода должен основываться на интерфейсе, использованном с НС11.
2) Определение кода статуса Команды Дисковода должно быть идентичным словам статуса, использованным с СР.
3) Переходы Назад должны быть разрешены/блокированы посредством регистра СЛС, считываемого с помощью ЦПС.
4) Направление Перехода Назад должно быть определено посредством ЦПС.
5) Программное обеспечение Команд Дисковода должно устанавливать скорость шпинделя для конкретного типа носителя.
6) Программное обеспечение Команд Дисковода должно обеспечивать подтверждение, что скорость шпинделя достигла заданного значения.
7) Программное обеспечение Команд Дисковода должно обеспечивать возможность производить выборку для определения температуры дисковода.
8) Команда Сброс Интерфейса должна выдавать СБРОС СЛЕДЯЩИХ СИСТЕМ на 1 мкс и затем отменять эту команду.
9) Команда Поиска должна обеспечивать выполнение в диапазоне физических дорожек, соответствующих логическим дорожкам в диапазоне от -3366 до +76724.
10) Программное обеспечение Команд Дисковода должно отпирать/блокировать магнит и выбирать полярность магнита.
11) Команда Частота/Лазерная мощность/Смещение должна обеспечивать установку для 34 зон частоты и лазерной мощности.
12) Программное обеспечение Команд Дисковода должно формировать сообщение ЦПС о выталкивании кассеты.
13) Программное обеспечение Команд Дисковода должно обеспечивать возможность восприятия того, когда кассета имеет защиту от записи.
14) Программное обеспечение должно контролировать выбор микросхемы для последовательного интерфейса.
15) Программное обеспечение должно использовать ЭЗУПВ для зарегистрированных событий и других сохраняемых параметров дисковода (например, для уровней лазерной мощности).
10. Программа Обработки Прерываний Дисковода
1) Программа Обработки Прерываний Дисковода должна обнаруживать, когда кассета введена и установлена на втулке. Затем кассета может быть приведена во вращение.
2) После того как кассета введена, загружена и раскручена, а также ЦПС "засинхронизирован", должна выдаваться команда CART_LOADED.
3) Если выдана команда Выталкивания Кассеты с Проигрывателя-автомата или нажат переключатель Выталкивания с Передней Панели, дисковод а) передает все установленные в очередь операции записи на носитель (кэш записи подавляется), в) замедляет вращение кассеты, с) выталкивает кассету.
4) Когда кассета остановлена, команда CART_LOADED должна быть отменена.
5) В ходе последовательности выгрузки кассеты выдается сигнал ошибки Проигрывателя-автомата, если ЦПС сообщает, что имела место ошибка выталкивания кассеты.
6) Программа Обработки Прерываний должна обрабатывать и очищать следующие типы ошибок: Ошибка Поиска, Ошибка Смещения, Дефект Магнита Смещения, Ошибка Лазера, Ошибка Загрузки/выгрузки, Ошибка Скорости Шпинделя, Ошибка Записи.
11. Требуемые Улучшения Функциональных Возможностей
1) Добавить поддержку команд, не связанных с доступом к носителю, когда дисковод удовлетворяет доступу к носителю, но при его текущем отсоединении. (Это обычно называется поддержкой множества инициаторов).
2) Модифицировать команды для поддержки различных наборов команд. (TBD - HP, IBM, DEC, Apple, Fujitsu и т.д.).
3) Добавить поддержку для новых наборов команд (TBD).
4) Добавить поддержку для предоставляемых Поставщиком Уникальных Комбинаций Опознавания Данных и Ключа/Кода Опознавания (TBD).
5) Добавить поддержку ППЗУ.
6) Добавить поддержку носителей CCW (псевдо-WORM).
7) Добавить кэш с упреждающим считыванием.
8) Добавить кэш записи, включая подавление буфера спустя выбираемый пользователем интервал задержки.
12. Требования к характеристикам
1) Программы обслуживания прерываний должны обеспечивать обслуживание при минимальном времени на сектор: 1х при 3600 об/мин - 538 мкс, 2х при 3320 об/мин - 368 мкс, 4х при 1900 об/мин - 272 мкс.
13. Другие требования
1) Программное обеспечение должно выдавать/отменять светодиодную индикацию на передней панели.
2) Программное обеспечение должно поддерживать автопрокладчик часов включения питания.
3) Программное обеспечение должно поддерживать автопрокладчик загрузки кассеты.
4) В случае отказов питания 5В или 12В дисковод должен обеспечивать дополнительные меры (TBD).
14. Источники прерываний
1) Источниками прерываний для Jupiter являются следующие: 1) INTO, Cirrus LogicSM331(DINT), Cirrus Logic SM330, RLL(1,7)KOДEK, 2) INT1, Cirrus Logic SM331(HINT), 3) INТ2, ЦПС, СЛС, 4) INT3, Сброс SCSI шины.
2) Источниками прерываний ЦПС являются следующие: 1) прерывание, не ведущее к преждевременному прекращению. Некорректная Ошибка Поиска, 10-секундный интервал таймера. Контрольная Сумма Некорректной Команды, Неизвестная Команда, Ошибка Выталкивания Кассеты, 2) Прерывание, ведущее к преждевременному Прекращению, Ошибка Фокусировки, Ошибка Трекинга. Ошибка Управления Мощностью Лазера, Ошибка Скорости Шпинделя.
3) Источниками прерываний СЛС являются следующие: Сброс с Проигрывателя-автомата, Запрос Снижения Мощности с Проигрывателя-автомата, Выталкивание кассеты с Проигрывателя-автомата, Выталкивание кассеты с Передней Панели, Кассета Введена (в горловине). Кассета Установлена (на втулке).
4) Введенная кассета не будет поддерживаться программным обеспечением.
15. Восстановление Ошибок
1) Особая Стратегия Восстановления для индивидуальных секторов будет использоваться после определенного пользователем повторного числа попыток и применения определенных пользователем порогов.
2) Восстановление Ошибок должно включать восстановление с использованием следующих режимов восстановления: (TBD).
В. ОПРЕДЕЛЕНИЕ САМОКАЛИБРОВКИ ПРИ ВКЛЮЧЕНИИ ПИТАНИЯ
Данный раздел включает описание тестов, выполняемых при самокалибровке при включении питания.
1. Проверка Регистров и флагов 80С188.
Флаги ЦПС для обозначения знака, проверки по четности, переноса и нуля проверяются, чтобы убедиться, что они корректно установлены и затем сбрасываются. Проверка проводится в два этапа. Сначала устанавливается значение 0хС5 в АН регистр и затем запоминается во флагах с использованием команды SAHF. Флаги проверяются на их состояние сброса (JNS, JNP, JNC, JNZ). Во-вторых, значение дополняется и запоминается во флагах. Флаги проверяются в их установленном состоянии (JS, JP, JC, JZ). Любой флаг не в надлежащем состоянии приводит к ошибке теста и обуславливает в дисководе использование светодиодной индикации для сигнализации об ошибке в ЦПС.
Проверка регистров представляет собой проверку на прохождение, предусматривающую пропускание 0xFFFF через все регистры (AX, BX, ES, CX, DS, DX, SS, BP, SI, DI, SP). Затем значение 0х0000 пропускается через те же самые регистры. Если желательное значение не присутствует в последнем регистре последовательности, то проверка признается ошибочной и в дисководе формируется соответствующая светодиодная индикация ошибки ЦПС.
2) Проверка ЗУПВ ЦПС
При проверке ЗУПВ ЦПС записывается комбинация байтов с приращениями во все ячейки статического ЗУПВ в два этапа. Поочередные комбинации записываются в блоки из 128 байт. На первом этапе комбинация для первого блока имеет вид 0х00, 0х01, 0х02,..., 0xFE, 0xFF. Комбинация для следующего блока имеет вид 0х01, 0х02, 0х03,..., 0xFF, 0х00. При втором проходе комбинация инвертируется. Если какая-либо из ячеек статического ЗУПВ не содержит корректного значения при считывании в конце каждого прохода, то тест признается ошибочным и в дисководе формируется светодиодная индикация ошибки ЗУПВ.
3. Проверка Вектора Прерываний 80С188
Проверка вектора прерываний использует прерывание программного обеспечения для проверки возможностей диспетчеризации блока 80С188. Элемент таблицы Вектора Прерываний (IVT) инициализируется для указания на тестовую Программу Обслуживания Прерываний. Регистр АХ инициализируется на 0х0000. Прерывание координируется с использованием инструкций INT, регистр АХ получает отрицательные приращения и осуществляется выход из Программы Обслуживания Прерываний. После возврата из прерывания значение а АХ проверяется. Если значение не совпадает с 0xFFFF, то проверка признается ошибочной и в дисководе используется светодиодная индикация для сигнализации ошибки ЦПС.
4. Проверка Контрольной Суммы ПЗУ
Проверка Контрольной Суммы ПЗУ проверяет содержимое "флэш" - ПЗУ с использованием базового полинома 16 степени. Если вычисленная сумма не нулевая, то тест признается ошибочным и в дисководе формируется соответствующая светодиодная индикация ошибки ПЗУ.
Для каждого 16-битового слова в ППЗУ нижний байт вводится по схеме "ИСКЛЮЧАЮЩЕЕ ИЛИ" в регистр ВН и ВХ умножается на два. Если флаг переноса устанавливается после умножения (сдвига), полином 0х38СВ вводится по схеме "ИСКЛЮЧАЮЩЕЕСЯ ИЛИ" в ВХ. Верхний байт из ППЗУ вводится по схеме "ИСКЛЮЧАЮЩЕЕСЯ ИЛИ" в регистр ВН и ВХ умножается на два. Если флаг переноса устанавливается после умножения (сдвига), полином 0х38СВ вводится по схеме "ИСКЛЮЧАЮЩЕЕСЯ ИЛИ" в ВХ.
5. Проверка Регистров SM331
Проверка Регистров Cirrus Logic CL-SM331 сбрасывает SM331 и проверяет регистры после сброса на соответствующие значения. Если какой-либо из регистров не проходит проверку, дисковод сообщает об условии невозможности сброса в исходное состояние и использует светодиодную индикацию ошибки (TBD).
Конкретные шаги состоят в следующем: 1) выдать сигнал сброса микросхемы SM331, 2) отменить сигнал сброса SM331, 3) очистить указатель доступа к диску, 4) регистр 0х57 (BM_DAPL) до 0x5F проверяются на нулевое состояние, 5) регистр 0х41 (SCSI_SEL_REG) проверяется на нуль, 6) регистр 0х43 (SCSI_SYNC_ CTL) до 0х45 проверяются на нуль, 7) регистр 0х48 (SCSI_STAT_2) до 0х49 проверяются на нуль, 8) регистр 0х50 (BM_SCHED_DATA) до 0х52 проверяются на нуль.
6. Проверка Контроллера Последовательности SM331
При проверке Контроллера Последовательности Cirrus Logic CL/SM331 записывается определенная комбинация в Память Управления Записью для контроллера и проверяется записанная комбинация. Если какая-либо часть проверки ошибочна, дисковод формирует сообщение об условии невозможности установки в исходное состояние и использует светодиодную индикацию для сигнализации ошибки.
Выполняются следующие конкретные операции:
1) Контроллер последовательности останавливается (в начальный адрес записывается значение 0xIF).
2) Комбинация с приращением записывается в каждую из 31 ячеек памяти управления считыванием для полей Следующий Адрес, Управление, Отсчет и Ветвление.
3) Комбинация с приращением проверяется.
4) Комбинация с отрицательным приращением записывается в каждую из 31 ячеек памяти управления записью для полей Следующий Адрес, Управление, Отсчет и Ветвление.
5) комбинация с отрицательным приращением проверяется.
7. Проверка КОДЕКА SM330
Проверка Cirrus Logic CL-SM330 КОДЕКА обеспечивает сброс SM330, очищает регистр выхода общего назначения, очищает ЗУПВ Корректора, проверяет ЗУПВ Корректора и формирует прерывание Отсчет Переноса Сектора, Равный 0.
Если какая-либо часть проверки ошибочна, то дисковод формирует сообщение об условии невозможности установки в исходное состояние и использует светодиодную индикацию для сигнализации об ошибке.
При этом выполняются следующие шаги:
1) Выдается сигнал сброса микросхемы SM330.
2) Отменяется сигнал сброса микросхемы SM330.
3) Формируется задержка по меньшей мере 10 мкс для того, чтобы микросхема выполнила сброс.
4) Регистр Выхода Общего Назначения инициализируется в 0х00.
5) Ячейки ЗУПВ Корректора 0х00 и 0х01 обнуляются.
6) Ячейки ЗУПВ Корректора 0x0F до 0х16 обнуляются.
7) Ячейки ЗУПВ Корректора 0х20 до 0х27 обнуляются.
8) Ячейки ЗУПВ Корректора 0х00 и 0х01 проверяются на наличие нуля.
9) Ячейки ЗУПВ Корректора 0x0F до 0х16 проверяются на наличие нуля.
10) Ячейки ЗУПВ Корректора 0х20 до 0х27 проверяются на наличие нуля.
11) Выполняется стандартная инициализация микросхемы, как описано выше.
12) Вектор прерывания для SM330 инициализируется для указания на программу обслуживания тестового прерывания.
13) Прерывание "Отсчет Переноса Сектора Равен Нулю" обуславливается путем записи нуля в качестве отсчета переноса в Регистр Отсчета Переноса Сектора.
14) Программное обеспечение ожидает максимального отсчета 0xFFFF прерывания для отрицательного приращения опрашиваемого регистра.
8. Проверка Внешнего КОДЕКА (TBD).
9. Проверка Связывающих Логических Схем (TBD).
10. Проверка Буферного ЗУПВ.
При проверке буферного ЗУПВ записывается адресная комбинация с приращениями во все ячейки в буферном ЗУПВ и затем комбинация проверяется. Использованная комбинация с приращением имеет вид: 0х00, 0х01, 0х02,..., 0xFF. Затем при проверке записывается инверсная адресная комбинация во все ячейки в буферном ЗУПВ, и затем комбинация проверяется. Использованная инверсная комбинация имеет вид: 0х00, 0xFF, 0xFE,..., 0х01. И, наконец, записывается 0х00 во все ячейки буферного ЗУПВ. Если какая-либо из ячеек ЗУПВ обнаружила ошибку, дисковод формирует сообщение об условии невозможности установления в исходное состояние, но не сигнализирует об ошибке посредством светодиода.
11. Самокалибровка При Включении Питания ЦПС.
Базовые функциональные возможности ЦПС подтверждаются с помощью блока 80С188 путем выдачи команды пересмотра кода считывания на ЦПС. Эта команда будет проверять интерфейс между блоком 80С188 и ЦПС, доступ к ячейкам памяти ЦПС, а также возможность возврата в корректный статус.
12. Проверка Магнита Смещения.
При проверке магнита смещения магнит смещения включается для осуществления функции записи. (Чтобы предотвратить случайную потерю данных, ЦАП мощности записи лазера будут поддерживаться на уровнях мощности считывания). Код Команд Дисковода обеспечивает включение магнита, установку мощности записи лазера и отсчет АЦП для проверки того, что обмотка смещения сформировала требуемый ток (TBD). Код Команд Дисковода будет ожидать несколько (TBD) мс, прежде чем считать отсчет АЦП. Если ток не в пределах заданного диапазона (TBD), то дисковод формирует сообщение об условии невозможности установки в исходное состояние, но не формирует сигнализацию об ошибке с помощью светодиода.
С. РЕГИСТРЫ SM330: Данный раздел содержит описание регистров Cirrus Logic SM330, КОДЕКА ЕСС Оптического Диска, как указано ниже в таблице 31.
D. РЕГИСТРЫ SM331: В данном разделе содержится описание регистров SM331, Контроллера Оптического Диска SCSI, как представлено ниже в таблице 32.
Е. РЕГИСТРЫ СЛС: Данный раздел содержит описание регистров связующих логических схем (MOST Manufacturing, Inc.), как представлено ниже в таблице 33.
Исключительные состояния дисковода: Статус и Обработка Ошибок
Представленные ниже таблицы 33-43 содержат общие сведения о вопросах обработки в "Исключительных состояниях", относящиеся к программному обеспечению, соответствующему настоящему изобретению, и к конкретным вопросам, связанным с этим.
Рассматриваются вопросы пропуска или изменения объектов, риска целостности данных, а также уточнения выполнения отдельных функций в дисководе (с учетом логики, затрат, участия человека).
Замечания и допущения:
1) Предполагается, что рассматриваемый перечень включает все условия обработки исключительных состояний дисковода.
2) На момент подачи настоящей заявки, раскрывающей наилучший на сегодняшний день режим осуществления изобретения, имеются различные аспекты регулирования мощности, обратной связи от лазера, допустимых порогов повреждения при считывании с носителя. Имея это в виду, в последующем описании предполагается исходное надежное рабочее состояние дисковода при достижении уровня считывания и фокусировки на внутреннем радиусе диска при инициализации дисковода (мощность считывания и фокус не должны устанавливаться в области данных).
3) Раздел восстановления относится к выключениям дисковода и энергонезависимой регистрации ошибок, обусловленных неудачей восстановления. Эти ошибки идентифицируются и регистрируются, но пользователь может пытаться выполнять команды повторно. Это приводит к увеличению риска целостности пользовательских данных при некоторой компенсации, обеспечиваемой энергонезависимой регистрацией ошибок.
4) Предполагается, что более одного инициатора имеется на SCSI шине.
5) Обнаружение ошибок не должно блокироваться (хотя прерывания могут маскироваться).
6) Приоритеты обработки исключительных состояний: 1) целостность данных, 2) влияние стоимости, 3) характеристики системы, 4) возможности регистрации ошибок.
7) Методы и специфика проектирования дисковода в некоторой степени являются функцией рынка. Для внешней среды, характеризуемой высокой загрязненностью или высоким уровнем вибраций, будут иметься различия в эксплуатационных характеристиках по сравнению с конкретными вариантами осуществления.
8) ЦПС не должен иметь дополнительных возможностей при проверках сброса, помимо поддерживаемых в настоящее время условий тестирования обмена данными и описательного статуса ошибок.
9) Биты 2 и 5 регистра Выхода Общего Назначения должны проверяться на надлежащую полярность питающей мощности. Дополнительные Исключительные Условия, не содержащиеся в Таблицах:
1) "Включение питания", "Жесткий Сброс" и "Мягкий Сброс" обсуждены выше.
2) Обработка для Исключительных Условий "Некорректная SCSI команда" и "Ненадлежащая SCSI команда" обсуждена в связи с Обработкой SCSI.
3) "Отказ питания" (5 В и 12 В) в настоящее время запускает сброс включения питания, описанный выше. Однако в настоящее время ведется дискуссия о том, что отказы питания следует обрабатывать по-разному (прерывания 12 В для ЦПС и отсутствие 5 В являются факторами проектирования). К моменту подачи настоящей заявки данный вопрос еще оставался открытым. Однако такое подробное рассмотрение этого вопроса показывает состояние продолжающихся разработок и не влияет на практическую реализацию изобретения в том виде, как оно здесь описано.
4) "Ошибка Мощности Записи Лазера", относящаяся к контролю уровней мощности записи лазера, в качестве Исключительного Условия не реализовывалась и не рассматривалась в качестве цели исследования.
5) Условие внутреннее для блока 188 "Дефект Записи" сигнализирует о ненадлежащих условиях записи и запускается ошибкой вращения. Ранее это Условие срабатывало также от реального измерения тока. Реальное измерение тока смещения является теперь вопросом будущего рассмотрения. Метки вопросов, включенных в таблицу, обозначают факторы проектирования, которые не будут препятствовать специалисту в практическом осуществлении изобретения в том виде, как оно здесь раскрыто.
Кэш Опережающего считывания
Данный раздел описывает работу Кэша опережающего считывания для дисковода RMD-5200-SD. Сначала будет дана общая характеристика кэша, а затем будет приведено описание отдельных его компонентов. В данном разделе также описывается проверка для верификации операций Кэша Опережающего Считывания.
Код 256 кэша был разработан на базе кода 128 кэша. Имеются лишь две отличительные особенности (помимо вызовов специфических функций носителя) в двух режимах работы. Первая состоит в том, что Программа Обслуживания Прерываний кэша 256 содержит обработку задержанных ошибок. (Задержанные ошибки представляют собой ошибки носителя, которые обнаружены прежде, чем завершена коррекция предыдущего сектора.) Второе отличие состоит в том, что режим 256 не диагностирует ошибку "Контроллер Последовательности Остановлен". Эти отличия не критичны для работы кэша. В настоящем обсуждении поэтому не делается различий между 256 и 128 кеэшированием.
Код кэша опережающего считывания сам по себе известен. В настоящем изобретении используются модификации исходного кода. Эти изменения были сделаны для улучшения целостности данных и для обеспечения более высоких функциональных возможностей. В настоящем обсуждении не затрагиваются вопросы, какие характеристики были изменены. Наоборот, описываются свойства наилучшего современного режима кода.
Общие сведения о кэше: Условия Разрешения Кэширования: Кэширование будет сбрасываться, если только применимы все следующие условия: 1) бит RCD Страницы Режима 8 установлен в нуль, 2) Текущей SCSI командой является Read_6 или Read_ 10 в LBA режиме адресования, 3) текущая SCSI команда считывания завершена без ошибок. Это включает фазу статуса Условия Проверки и перераспределения. Кэширование не выполняется, если какое-либо перераспределение сделано для того, чтобы без задержки можно было обновлять SDL.
Операция Упреждающей Выборки Кэша: Операция упреждающей выборки начинается в логическом блоке, непосредственно после последнего логического блока предыдущей команды считывания. Ошибки, которые возникают при операции упреждающей выборки, не сообщаются инициатору, если только адресат не может в результате ошибки корректно выполнить последующие команды. Ошибка будет сообщаться в последующей команде.
Завершение кэширования: Кэширование будет завершаться после любого из следующих событий: 1) последний подлежащий кэшированию LBA считан, 2) возникает невосстановимая ошибка и повторные попытки использованы, 3) произошел Сброс Компонента Шины, 4) принята конфликтующая SCSI команда (Конфликтующая SCSI команда - это такая команда, которая требует от дисковода осуществления поиска, доступа к буферу, изменения параметров дисковода (скорости шпинделя, статуса предупреждения снятия носителя и т. д.), как обсуждено ниже, 5) произошло Прерывание Дисковода.
Компоненты Кэша: Страница Режимов 3: Страница Режимов 8 определяет параметры, которые влияют на работу кэша опережающего считывания. Однако только бит RCD (бит 0 или бит 2) оказывает реальное влияние на кэш опережающего считывания в RMD-5200-SD&. Этот бит представляет собой бит Отмены Кэша Считывания (RCD). Как следует из этого его определения, когда бит установлен, кэширование отменено.
Другие поля в Странице Режимов 8 не реализованы и не могут быть изменены относительно их значений по умолчанию.
Параметры Кэша Структуры Дисковода: Параметры кэша, которые индицируют статус кэша опережающего считывания, запомнены в структуре дисковода drv_ cfg:
1) cache_ctrl (UNIT)
Отдельные биты описывают текущее состояние кэша:
0х0001: CACHE_ENABLED (РАЗРЕШЕНИЕ_КЭШИРОВАНИЯ)
Установка в странице режимов 8 позволяет осуществлять работу с кэшем, а последняя команда СЧИТЫВАНИЯ с главного компьютера представляет собой Read_6 или Read_10 в режиме LBA и имеются блоки, которые могут быть кэшированы.
0х0002: CACH_IN_PROG (КЭШИРОВАНИЕ ОСУЩЕСТВЛЯЕТСЯ)
Показывает, что аппаратные средства выполняют считывание с кэшированием. Устанавливается, когда считывание кэша сброшено, и сбрасывается, когда Программа Обслуживания прерываний кэша устанавливает tcs в очередь кэша.
0х0004: CACHE_STOP (ОСТАНОВКА КЭШИРОВАНИЯ)
Устанавливается задачей Контроля Кэша, чтобы уведомить Программу Обслуживания прерываний кэша о завершении кэширования.
0х0008: CACHE_TCS_ON_Q
Показывает, что tcs из Программы Обслуживания прерываний находится в очереди Контроля Кэша. Эта функция tcs должна обслуживаться перед сбросом следующего считывания кэша.
0х0010: CACHE_START_SCSI_XFER
Устанавливается функцией Данные_ Считывания_ В_Кэше, когда имеет место результативное обращение в кэш. Этот бит показывает, что процессор считывания может начать SCSI перенос немедленно.
0х0020: CACHE_ABORT_REDT_TASK
Устанавливается Контролем Кэша для указания, что управление должно вернуться к Задаче SCSI Контроля.
0х0040: CACHE_MORM_IN_PROG
Показывает, что текущая операция считывания осуществляется для запрошенных данных.
2) cache_start_lba (ULONG)
Кэшируется первый LBA.
3) cache_cur_lba (ULONG)
Кэшируется LBA, следующий за последним кэшированным LBA.
4) cache_buff_addr (ULONG)
Адрес буфера, соответствующий cache_start_lba.
5) cache_xfer_len (UINT)
Число блоков, оставленных для кэширования.
6) cache_blks_rd (UINT)
Число кэшированных блоков
7) cache_free_space (UINT)
Свободное пространство, предоставленное для кэшируемых данных
8) cache_free_space_predict (UINT)
Ожидаемое свободное пространство для кэшируемых данных.
Функции кэша: Функции, запрашиваемые при разрешении кэширования будут описаны примерно в порядке, в котором они вызываются при простой последовательности кэширования.
Проверка Очереди Маршрутизации: (Старая Задача, Новая Задача):
Как Задача SCSI Контроля, так и Задача Контроля Кэша способны обрабатывать TCS из SCSI выбора Программы Обслуживания Прерываний. Только одна из этих двух задач будет выполнять свою функцию в каждый данный момент времени. Переменная scsi_mon_task используется для обозначения того, какая задача должна принять любой следующий SCSI выбор TCS. Проверка Очереди Маршрутизации будет назначать scsi_mon_task=Новая_3адача. Кроме того, очередь Старой Задачи фильтруется. Любые TCS с Программы Обслуживания Прерываний Дисковода или с SCSI выбора Программы Обслуживания Прерываний переносятся в очередь Новой Задачи. Старые TCS освобождаются.
Проверка Очереди Маршрутизации вызывается как Задачей SCSI контроля, так и Задачей Контроля кэша, когда управление SCSI переключается между ними.
Comute_cache_rng(): Эта функция представляет собой программу трансляции, вызываемую перед запуском нормальной операции считывания, если кэширование может быть выполнено позже. Ее целью является вычисление первого LBA, подлежащего кэшированию, и максимального числа блоков, которые могут быть кэшированы (cache_xfer_len). Длина переноса кэша усекается максимальным количеством располагаемого свободного пространства и максимальным LBA. Функция compute_cache_rng() также инициализирует drv_cfg.cache_blks_rd=0. Если длина переноса корректна, то устанавливается бит CACHE_ENABLED в функции drv_cfg. cache_ctrl.
Prep_Cache(): Данная функция является программой трансляции, назначением которой является определение того, закончено ли нормальное считывание, и если это так, то инициализация следующих параметров кэша: 1) drv_cfg.cache_ free_space, 2) drv_cfg.cache_free_space_predict, 3) drv_cfg.cache_buff_addr. Функция Prep_Cache() формирует ответ ИСТИННО, если кэш может быть сброшен, в противном случае формирует ЛОЖНО.
Программа Обслуживания Прерываний Кэша (RA_cache_isr или gcrRAC_isr): Программа Обслуживания Прерываний Кэша представляет собой упрощенную версию нормальной Программы Обслуживания Прерываний считывания, за исключением того, что она упрощена в следующих областях: 1) при завершении проверки ЕСС Программа Обслуживания Прерываний только проверяет наличие свободного пространства и завершение пакета. В отличие от нормального считывания кэш не связан с SCSI переносами, так что он не требует проверки SCSI условий уведомления, 2) за исключением ошибки остановки контроллера последовательности. Программа Обслуживания Прерываний Кэша не различает типы ошибок. Кэширование не изменяет порогов ошибок при повторных попытках, так что нет необходимости определять конкретный тип ошибок, 3) Программа Обслуживания Прерываний Кэша проверяет бит CACHE_STOP в функции drv_cfg.cache_ctrl для каждого завершения проверки ЕСС. В случае его установки Программа Обслуживания Прерываний завершает последующее кэширование.
Ввиду ее упрощенного характера Программа Обслуживания Прерываний Кэша формирует ответ только для трех состояний кэша: 1) RA_SFER_CMPLT, формируемый при успешном считывании блоков кэша и необходимости нового поиска для продолжения кэширования, 2) RA_RD_ERROR, формируемый при возникновении какой-либо ошибки, если только она не была обусловлена остановкой Контроллера Последовательности, 3) RA_SEQ_STOPPED. Эта ошибка обрабатывается отдельно, ввиду того, что требуется корректирующее действие для повторного запуска контроллера последовательности.
REQUEST_TASK (Новая Задача): Request_task (задача запроса) устанавливает состояние вызывающей задачи в режим ожидания при активизации Новой_3адачи. Задача запроса также сохраняет значение указателя команды в вызывающей функции. Новая Задача будет начинать выполнение в точке, где она последний раз вызвала Задачу Запроса (указывается сохраненным указателем команды).
Задача Контроля Кэша: Активизация Задачи Контроля Кэша: Задача Контроля Кэша активизируется посредством Задачи Считывания после последнего переноса данных назад в главный компьютер. После активизации она обрабатывает TCS из выбора SCSI Программы Обслуживания прерываний, Программ Обслуживания Прерываний Дисковода и Кэша.
Задача контроля Кэша не является истинной задачей в том смысле, что она не активизируется просто постановкой TCS в свою очередь. Напротив, она вызывается Задачей Считывания посредством вызова ЗАДАЧИ_ЗАПРОСА (Новой Задачи), как указано выше. Первоначально Задача Контроля Кэша будет начинать свое выполнение с самой удаленной установки в режим ожидания. Задача Контроля Кэша возвращает управление к Задаче считывания при следующем вызове Задачи Запроса.
Важно отметить, что в то время, когда Задача Контроля Кэша действует, имеется один TCS, используемый Задачей Считывания, который еще не был возвращен в систему. Задача Контроля SCSI по-прежнему ожидает данного конкретного TCS, когда управление возвратится к Задаче Контроля SCSI.
Функции Контроля SCSI:
Частично роль Задачи Контроля Кэша состоит в обработке TCS из SCSI выбора Программы Обслуживания Прерываний. Задача Контроля Кэша начинает получать TCS из SCSI выбора Программы Обслуживания Прерываний, когда Задача SCSI контроля получает команду СЧИТЫВАНИЯ и Страница Режимов 3 не блокировала кэширование. В этот момент Задача SCSI контроля маршрутизирует свои TCS путем вызова Проверки Очереди Маршрутизации (SCSI_MONITOR_TASK, CACHE_MONITOR_TASK).
Задача Контроля Кэша группирует SCSI команды в три категории, которые включают следующее: 1) Конфликтующие Команды, 2) Совпадающие По Времени Команды, 3) Непрерывные Команды. В зависимости от категории команды Задача Контроля Кэша будет отменять кэширование, выполнять команду или останавливать и возобновлять кэширование.
Конфликтующие команды: Конфликтующая команда представляет собой команду, которая требует от дисковода осуществлять поиск, доступ к буферу, изменение параметров дисковода (скорости шпинделя, статуса предупреждения снятия носителя и т.д.) После приема конфликтующей SCSI команды Задача Контроля Кэша будет отключаться и прерывать кэширование. Задача SCSI контроля будет повторно запущена. Следующие команды определены как конфликтующие: Обнулить Блок, Запретить/разрешить снятие носителя. Форматировать, Запись_10, Перераспределить Блок, Поиск_10, Стирание_6, Стирание_10, Запись_6, Запись/Верификация, Поиск_ 6, Верификация, Выбор Режима, Считывание Дефектных Данных, Резервировать Блок, Записать Буфер, Освободить Буфер Считывания Блока, Восприятие Режима, Считывание Продолжительно, Запуск/Остановка, Запись Продолжительно, Передать Диагностику, Все Уникальные Команды Поставщика.
Совпадающие По Времени Команды: Совпадающие по времени команды - это такие команды, которые могут выполняться без ухудшения состояния кэша. Следующие команды определены как совпадающие по времени команды: Блок Проверки Готов, Запрос, Запрос опознавания. Емкость считывания.
Непрерывные Команды: Непрерывные Команды представляют собой команды считывания, которые могут запрашивать кэшированные данные и сбрасывать дополнительные считывания кэша. Только две команды классифицируются как непрерывные команды. Это команды Read_6 и Read_10.
Обработка TCS Программы Обслуживания Прерываний Кэша: Задача Контроля Кэша получает TCS от Программы Обслуживания Прерываний Кэша, затем вызывает функцию Ra_CacheIsrProc() для обработки TCS.
Отмена Задачи Контроля Кэша: Управление возвращается к Задаче Считывания в случае, если приходит SCSI команда READ (считывания), в которой запрашиваются некэшированные данные. Управление возвращается к Задаче Контроля SCSI в случае, если кэширование закончено вследствие появления сброса SCSI, Сообщения Сброса Компонентов Шины, конфликтующей SCSI команды или Прерывания Дисковода.
Когда Задача Контроля Кэша отменена, управление возвращается к Задаче Считывания, что может затем возвратить управление к Задаче Контроля SCSI. Поток команд управления определяется состоянием задачи кэширования, установленным Задачей Контроля Кэша. Состояния задачи кэширования оцениваются посредством Задачи Считывания, когда она повторно устанавливается посредством вызова ЗАДАЧИ_ ЗАПРОСА. Ниже описаны три состояния задачи кэширования: 1) RAC_TERM: Данное состояние указывает, что кэширование прекращено. Задача Считывания будет возвращаться к Контролю SCSI, который немедленно возвращает READ_TCS и осуществляет выборку следующего TCS из очереди. Заметим, что Задача Контроля SCSI не переходит к фазе STATUS, как это обычно имело бы место, так как статус и завершение команды уже переданы как часть перехода к Задаче Контроля Кэширования. 2) RAC_CONT: Это состояние указывает, что поступила новая команда READ и все или часть запрошенных данных уже кэшированы. Задача Контроля Кэширования сбросила SCSI перенос, и Процессор Считывания требует ожидания прихода SCSI TCS. 3) RAC_NEW_REQ: Данное состояние указывает, что новая команда READ поступила и никакие из запрашиваемых данных не кэшированы. Процессор Считывания требует сброса "нормального" считывания и затем ожидания TCS с Программы Обслуживания Прерываний команды READ.
RaCacheIsrProc(): Данная Программа вызывается Задачей Контроля Кэширования, и ее назначением является выполнение функций Задачи Считывания в отношении переноса с диска. Она обрабатывает TCS с Программы Обслуживания Прерываний Кэша, обновляет соответствующие параметры в структуре дисковода и сбрасывает дополнительные операции считывания при необходимости.
StopCacheinProg(): Данная программа вызывается Задачей Контроля Кэширования, когда она принимает "непрерывную" команду READ. Назначением этой программы является завершать с установкой в исходное состояние текущий процесс кэширования. Она проверяет бит CACHE_IN_PROG, определяя, производится ли кэширование. Если да, то устанавливается бит CACHE_STOP для уведомления Программы Обслуживания Прерываний Кэширования о завершении кэширования. Спустя 5 мс для обеспечения завершения кэширования бит CACHE_IN_PROG проверяется вновь, чтобы убедиться в том, что Программа Обслуживания Прерываний отключила кэширование. Если бит не очищен, то предполагается, что кэширование прекращено с помощью каких-то других средств. В этом случае биты CACHE_STOP и CACHE_IN_PROG очищаются.
RdDataInCache(): Эта программа вызывается Задачей Контроля Кэширования, когда она запускает обработку "непрерывной" команды READ. Ее назначением является определение того, имеется ли результативное обращение в кэш при новом запросе считывания. Если такое результативное обращение имеется, то устанавливается бит CACHE_ START_ SCSI_ XFER в команде drv_cfg.cache_ctrl. Программа RdDataInCache также модифицирует команду drf_cfg.rw_scsi_blks для отражения того, сколько из запрошенных блоков кэшированы.
Если имеет место результативное обращение в кэш, но не все запрошенные данные кэшированы, то программа RdDataInCache модифицирует структурные данные дисковода для указания того, сколько блоков считано, сколько осталось считать и где считывание должно возобновляться.
Проверка Характеристик Кэширования с Опережающим Считыванием: Описание Задачи: Была разработана программа проверки кэша, обозначенная СТ.С. Эта программа проверки кэша запускается с адаптером SDS-3(F) главного компьютера. Эта программа была незначительно модифицирована с получением СТТ.С. Программа СТТ. ЕХЕ была использована для верификации кэша опережающего считывания RMD-5200-SD.
Программа СТТ исследует кэш по первым 64 К LBA. Характерная комбинация записывается в каждый из этих LBA. Комбинация состоит из всех ОХ5А, причем первые четыре байта перезаписываются шестнадцатеричным адресом LBA блока (за исключением LBA, 0, у которого первые четыре байта установлены в 0xFF). Программа СТТ сначала проверяет LBA 0, и если ожидаемая комбинация отсутствует, то СТТ инициализирует диск. Если LBA 0 согласуется, то диск считается инициализированным.
После того, как диск инициализирован, программа СТТ выполняет несколько проходов последовательных считываний по 64 К блокам. Одна и та же длина переноса используется при проходе. Длина переноса затем удваивается для следующего прохода. Максимальная длина переноса составляет 64 блока ввиду ограниченных размеров буфера адаптера главного компьютера. Сравнение данных выполняется по каждому считыванию для проверки целостности данных.
Варианты Проверки: Результаты Регистрации в Файле (Опция Линии команд): Пользователь может определить файл регистрации путем выполнения с командной строкой С: > CTT-fo= filename.ext. Если файл регистрации определен, то результаты, обычно распечатываемые на принтере, могут также распечатываться в файле регистрации.
ID адресата: Программа СТТ может проверять различные ID адресатов, хотя она не может делать это при том же самом выполнении.
Число итераций: Пользователь может определить исходную длину переноса. При последовательных проходах длина переноса удваивается, пока длина переноса не превысит 64 блока.
Пауза Между Считываниями: Программа СТТ будет осуществлять проходы без пауз между считываниями. Как вариант, однако, программа СТТ будет также осуществлять проход с паузами между считываниями. Этот вариант гарантирует, что дисковод имеет время для осуществления полного или частичного кэширования, в зависимости от задержки. Частичное кэширование проверялось для обеспечения того, что дисковод останавливает кэширование, когда буфер заполнен.
Длина Паузы: Если выбран вариант с паузами, то пользователь будет запрашиваться о времени задержки на паузу в мс.
Останов при ошибках: Программа СТТ также запрашивает, следует ли остановить проверку, если она обнаружила условие ошибки (например, несовпадение данных или статус условия проверки). Останов полезен, если при выполнении пользователь не регистрирует результаты в файле, например, при проверке частых ошибок.
Архитектура Программного Обеспечения Дисковода
В данном разделе представлены архитектурные изменения, требуемые для реализации Jupiter-1 с использованием Комплекта микросхем Контроллера Оптического Диска Cirrus Logic и программного обеспечения RMD-5200-SD в качестве основы.
Архитектура Jupiter-1 будет уменьшать количество задач, требуемых в системе. Задача Контроля SCSI (называемая Задачей Контроля) будет управлять всеми функциями дисковода. Задача считывания и Задача Записи будут объединяться в Задачу Дисковода. Функциональные возможности Задачи Контроля Кэша с Опережающим считыванием будут разделены: дублирование функций контроля будет исключаться и функции кэширования будут перемещаться в Задачу Дисковода. Конкретные изменения в (SCSI) Задаче Контроля и Задаче Дисковода описаны выше.
Прерывания: Дисковод Jupiter-1 имеет четыре категории прерывания. Они включают немаскируемые прерывания (NMI), SCSI прерывания, прерывания Дисковода двух типов.
Немаскируемые прерывания генерируются, когда выдан сигнал СБРОСА шины SCSI, когда выдан сигнал ACRESENT на 20-штыревом соединителе или когда выдана команда PWRDNREQ (запрос понижения мощности проигрывателя-автомата).
Прерывание SCSI генерируется, когда первые шесть байтов команды приняты, когда выдан сигнал Прерывания Шины SCSI, когда возникает ошибка проверки по четности SCSI, когда возникает ошибка проверки по четности буфера или когда завершен перенос SCSI.
Прерывание дисковода (первого типа) генерируется с трех микросхем: SM331, SM330 и внешнего КОДЕКА. Прерывания со схемы SM331 формируются, когда контроллер последовательности останавливается или когда обнаружена ошибка проверки по четности вектора коррекции ЕСС. Схема SM330 осуществляет прерывания в режиме 1х или 2х, когда считан корректный ID и возникает ошибка носителя, ошибка ЕСС, обнаруживается ошибочный сектор, регистр Отсчета Переноса Секторов дошел до нулевого отсчета или когда генерируется прерывание Завершения Операции. Схема SM330 осуществляет прерывания в режиме 4х, когда возникает ошибка ЕСС или когда генерируется прерывание Завершения Операции. Внешний КОДЕК осуществляет прерывания в режиме 4х, когда при считывании корректного ID возникает ошибка носителя, обнаруживается ошибочный сектор. Регистр Отсчета Переноса Секторов сформировал нулевой отсчет, когда имеет место ненормальное завершение стирания или записи или когда формируется импульс указателя.
Прерывание Дисковода (второго типа) генерируется ЦПС или СЛС. ЦПС будет генерировать Прерывание Дисковода, когда он не может надлежащим образом инициализироваться, когда возникает ошибка поиска, обнаружено условие ошибки трекинга, скорость шпинделя имеет требуемое значение или когда скорость шпинделя не достигла требуемого значения. СЛС будет генерировать Прекрывания Дисковода, когда выдана команда Выталкивания кассеты с Проигрывателя-автомата, нажата кнопка выталкивания на
передней панели, выдан сигнал ограничения выталкивания, сигнал датчика кассеты в одном из двух устойчивых состояний или когда сигнал датчика установки кассеты находится в одном из двух устойчивых состояний.
Многозадачное Ядро: Идентификация Типов Сообщений: Современная архитектура предоставляет средства идентификации типа конкретных принимаемых сообщений. В настоящее время источник сообщения прерывается и "статус" сообщения иногда используется в качестве типа. Целочисленные переменные для TCS ID, TCS Source ID, TCS Destination ID преобразуются в байтовые переменные. Новые байтовые переменные для типа сообщений прибавляются, поддерживая дополнительные байты в качестве резервных в заголовке TCS. Переменная типа сообщения будет функционировать в качестве поля флага в вариантной записи.
Совпадающая по времени обработка: Совпадающая по времени обработка требуется для Jupiter-1 для дисковода, чтобы: 1) выполнить упорядочивание команд в очередь, 2) реагировать в среде с множеством инициаторов на команду, не связанную с доступом к носителю, когда запрос считывания или записи выдан в Задачу Дисковода. Современная архитектура заставляет Задачу Контроля SCSI блокировать выполнение блока до тех пор, пока Задача Считывания или Задача Записи не закончит обработку текущего запроса.
Совпадающая по времени обработка в Jupiter-1 будет осуществляться 1) не разрешая Задаче Контроля блокировать после передачи запроса на Задачу Дисковода, 2) обеспечивая всем задачам участие в циклическом планировании за счет "совместного" использования ресурсов ЦСП, 3) разрешая Задаче Контроля осуществлять приоритетное прерывание Задачи Дисковода или Задачи Низкого Уровня при приеме Неразъединяющей команды. Для выполнения условия (1) Задача Контроля будет использовать новое обслуживание ядра для передачи запроса в Задачу Дисковода. Современный способ, состоящий в том, что регистр задач, который должен принимать сообщение при возникновении Прерывания Дисковода, должен быть изменен. Маршрутизация сообщения при Прерывании Дисковода будет подробно обсуждена ниже. Условие (2) циклического планирования будет реализовано так, как описано в следующем разделе. Условие (3) приоритетного прерывания будет реализовано так, как описано в последующем разделе. Следует отметить, что если приоритетное прерывание не реализовано, то для управления интерфейсом SCSI потребуется установка семафора (средства синхронизации параллельных вычислений). Новое обслуживание ядра потребуется для проверки, проверки и установки и очистки семафора SCSI-in_use.
Циклическое планирование: Для того чтобы каждая задача имела "одинаковый" доступ к ресурсам ЦПС, каждая задача должна иметь возможность обращения к ЦПС с периодическими интервалами времени. Это уже в некоторой степени обеспечено, когда выполнение задачи блокируется, когда она ожидает следующего сообщения, которое должно прибыть в свою очередь. С учетом требования совпадающей по времени обработки время ожидания из времени прогона Задачи Контроля и время, в течение которого Задача Дисковода оставляет ЦПС, должно быть минимизировано. Вопрос времени ожидания рассмотрен в следующем разделе при рассмотрении вопросов приоритетного прерывания.
Если приоритетное прерывание не требуется, то ЦПС будет произвольно разделяться между задачами. Ядро может ожидать, когда следующее сообщение вызовет блокирование текущей задачи, в то время как ядро осуществляет поиск готовой задачи. Планирование времени ожидания при выполнении ядром такого поиска будет минимизировано за счет 1) уменьшения числа задач, которые должны проверяться, 2) за счет сокращения возможных состояний, в которых могут находиться задачи. Число задач уменьшается путем исключения Задачи Контроля Опережающего считывания и путем объединения отдельных задач для считывания и записи каждого носителя в сигнальную задачу. Консолидация задач описана ниже более детально.
Набор возможных состояний для задачи в настоящее время включает состояние "ожидания конкретного сообщения". При требовании совпадающей по времени обработки это состояние будет недействующим и поэтому может быть исключено из системы. Будут иметься только три возможных состояния: активное, ожидание сообщения и режим ожидания. Проверка кода ядра для задачи режима ожидания и проверка для задачи, ожидающей сообщения, уже оптимизированы в высокой степени. Перечень Считывания задач, готовых для возобновления, не будет добавлять существенного повышения требований к эффективности. Ядро потребует дополнительно 11 с для проверки дополнительно двух задач перед возвратом к проверке исходной задачи.
Приоритетное прерывание: Архитектура Jupiter-1 требует приоритетного прерывания в той степени, чтобы неразъединяющая команда, принятая во время команды, требующей доступа к носителю, могла обусловить приоритетное прерывание Задачей Контроля Задачи Дисковода или Задачи Низкого Уровня. Отсутствует требование, как для Задачи Дисковода осуществлять приоритетное прерывание Задачи Контроля или Задачи Низкого Уровня. Здесь предложено, что лучше заставить Задачу Дисковода перезапустить часть своей обработки, чем задержать неразъединяющую команду на десятки или несколько десятков мс. Необходимо идентифицировать части кода в Задаче Дисковода и Задаче Низкого Уровня (в частности, в особых процедурах восстановления), которые требуют перезапуска обработки для данной части, если задача была приоритно прервана. Задача Дисковода и Задача Низкого Уровня должны регистрироваться в начале таких частей кода для идентификации того, где следует осуществить перезапуск. Это подобно регистрации при Прерываниях Дисковода. Если Задача Дисковода или Задача Низкого Уровня является активной задачей, но не зарегистрирована, то задача предполагается полностью приоритетно прерываемой. Т.е. задача может быть прервана и затем возобновлена с той же самой точки без какого-либо отрицательного последствия.
Если новая команда принята Программой Обслуживания Прерываний SCSI, то вызов нового ядра будет сделан на выходе из Программы Обслуживания Прерываний для определения того, требуется ли приоритетное прерывание, и если да, то осуществить координацию. Если Задача Контроля была текущей задачей перед прогоном Программы Обслуживания Прерываний SCSI, то не требуется приоритетного прерывания. Если Задача Дисковода или Задача Низкого Уровня была текущей задачей, то она будет приоритетно прервана.
Если новая неразъединяющая команда принята Программой Обслуживания Прерываний SCSI, когда дисковод осуществляет обработку неразъединяющей команды доступа к носителю, то Программа Обслуживания Прерываний будет на выходе вызывать новую программу обслуживания ядра для обнаружения регистрации задачи. Если она не зарегистрирована, то будет прервана Задачей Контроля и будет возобновлена в точке, где она была прервана при возобновлении циклического планирования. Если задача зарегистрирована, ядро будет 1) выключать дисковод, 2) выводить дисковод из Спирального Режима (Команда Дисковода к ЦПС), 3) векторизировать Задачу Дисковода или Задачу Низкого Уровня для перезапуска в зарегистрированном адресе, 4) выполнять перенос в Задачу Контроля. После того как Задача Контроля обработала новую команду, она будет вызывать ядро для ожидания следующего сообщения. Ядро будет затем входить в Цикл Ожидания готовой задачи. Задача Дисковода или Задача Низкого Уровня будет готовой, ядро будет координировать ее и выполнение будет возобновляться с зарегистрированного адреса с значением в АХ указателе, что имел место перезапуск.
Любой доступ к носителю, где ЦПС контролирует в реальном времени некоторый аспект диска (например, ожидает метки сектора), будет прерван, если Задача Контроля обусловила приоритетное прерывание. Эти части кода потребуют управления посредством регистрации для перезапуска при приоритетном прерывании.
Как только Задача Дисковода или Задача Низкого Уровня сбросила доступ к носителю, аппаратные средства и Программа Обслуживания Прерываний диска будет продолжать пакет до полного завершения и передавать сообщение в задачу для указания того, что пакет завершен. Задача затем обеспечивает вывод из очереди сообщения и сброс следующего пакета. Приоритетное прерывание после того как аппаратные средства сброшены, не будет создавать никаких проблем управления дисководом.
При последующем поиске доступа к носителю код поиска отменяет SCSI прерывания, пытается считать ID и ожидает до 16 мс Программу Обслуживания Прерываний SCSI для считывания ID, который был зафиксирован. За эти 16 мс Программа Обслуживания Прерываний SCSI не может выполняться, что означает, что шина SCSI потенциально удерживается в середине Фазы Команды (после первых шести байтов, считанных SM331). В случае успешного поиска SCSI прерывания будут оставаться блокированными от момента запуска кода поиска для считывания ID до возврата кода к коду установки (например, gcr_StartRdVfy), после того как все регистры установлены и после того как контроллер последовательности запущен. Для того чтобы лучше обработать это условие, новая архитектура позволит Задаче Контроля приоритетным образом прерывать поиск. Это будет выполняться путем совмещения кода поиска для приоритетного прерывания и разрешения SCSI пpepывaний. Если SCSI прерывание (требующее приоритетного прерывания) возникает при осуществлении поиска, то ЦПС будет завершать поиск и затем устанавливать дисковод в режим Перехода Назад. (Это предполагает, что ЦПС будет устанавливать в очередь команду Блокировать Спираль при завершении поиска). Если SCSI прерывание (требующее приоритетного прерывания) возникает после того, как поиск завершен, но перед тем, как аппаратные средства сброшены, код должен перезапускаться в его зарегистрированном адресе и в конечном счете выполнять повторный поиск. Если SCSI прерывание происходит после того, как аппаратные средства сброшены, доступ к носителю является полностью приоритетно прерываемым и поэтому не требует совмещения.
Размер стека: Размер стека для каждой задачи в настоящее время установлен как 512 байтов. При повышении модульности, оживаемом для Jupiter-1, и дополнительных уровнях, требуемых для управления командами, упорядоченными в очередь, кэширования и т.д., может потребоваться увеличить размер стека до 1024 байтов. При уменьшении числа задач до трех память, выделенная для стека, уменьшается.
Структура конфигурации дисковода: Идентификация Типа Носителя: Потребуется, чтобы программное обеспечения определяло тип носителя, введенного в дисковод, для координирования соответствующих программ для каждого типа носителя. Отдельные биты в переменной Конфигурации Дисковода будут использованы для каждого из типов носителя: 1х, 2х и 4х.
Переменная Состояния Дисковода: При требовании к совпадающей по времени обработке, описанной выше, Задача Контроля должна обеспечивать определение текущего состояния дисковода и выдавать соответствующее сообщение согласно вновь возникшему событию. Это будет выполняться путем введения новой переменной "состояние дисковода", которой будет управлять только Задача Контроля. В таблице 44 ниже приведен перечень возможных состояний дисковода.
Задача Дисковода может изменить состояние с "Считывания" на "Считывание без разъединения" или "Считывание с разъединением".
Самокалибровка при включении питания: Контрольная Сумма ПЗУ: При проверке ПЗУ в настоящее время вычисляется контрольная сумма для одного СППЗУ. Для сдвоенной конструкции Jupiter-1 диапазон для контрольной суммы ПЗУ должен включать адресную область для обеих микросхем. Адресная область для обеих микросхем имеет вид 0хС0000 до 0xFFFFF.
Диагностика буферного ЗУПВ: Диагностика буферного ЗУПВ будет существенно более продолжительной для 4 MB буферного ЗУПВ. Jupiter-1 должен обеспечивать обработку выбора SCSI спустя 250 мс. Программное обеспечение в настоящее время имеет двухэтапную инициализацию. На этапе 1 Инициализации, когда выбор не разрешен, дисковод выполняет свою диагностику (в настоящее время включает диагностику Буферного ЗУПВ). Как только целостность дисковода установлена, дисковод переходит на этап 2 Инициализации, где он может обрабатывать выбор и реагировать только на команды Готовности Блока к Проверке и Запроса. На этапе 2 дисковод считывает ЭСППЗУ, инициализируя Данные Запроса, Данные Страницы Режимов и различные другие структуры данных. Именно на этапе 2 Инициализации должна проводиться проверка 4 MB буферного ЗУПВ Jupiter-1.
Диагностика ЗУПВ: Если диагностика ЗУПВ для обеих микросхем статического ЗУПВ требует относительно продолжительного времени, то проверку можно разделить и остальные части выполнить на этапе 2 Инициализации, как описано выше для Буферного ЗУПВ.
Сброс с Проигрывателя-Автомата: Если дисковод обнаруживает, что Сброс с Проигрывателя Автомата выдан, дисковод должен ожидать отмены этой команды, прежде чем пытаться считывать состояние 20-штыревого соединителя для SCSI ID и разрешать проверку по четности SCSI. Дисковод Jupiter-1 может выполнять весь этап 1 Инициализации при выдаче команды Сброса с Проигрывателя-автомата. Когда дисковод готов инициализировать SCSI часть SM331, он проверяет микросхему СЛС для обнаружения наличия 20-штыревого соединителя. Если он не подключен, то SCSI ID и разрешение проверки по четности SCSI определяются дополнительными перемычками: Если 20-штыревой соединитель подсоединен, то дисковод будет опрашивать микросхему СЛС для контроля действительного уровня команды Сброса с Проигрывателя-автомата. Если эта команда отменена, то сигналы с 20-штыревого соединителя будут определять SCSI ID и наличие разрешения проверки по четности SCSI.
Самозагрузка: Код Инициализации: Код для этапа 2 Инициализации содержится в Задаче Самозагрузки. Задача Самозагрузки выполняет инициализацию, создает другие задачи дисковода и затем заменяется кодом для Задачи Контроля. Это требует определенного времени для наложения Задачи Самозагрузки на Задачу Контроля. Jupiter-1 будет размещать код этапа 2 Инициализации в программу, которая будет сначала выполняться в Задаче Контроля. После выполнения инициализации Задача Контроля будет переходить к коду, который она обычно выполняет. Вследствие управляющих циклов, определенных в каждой из задач, выполнение задачи не выходит из цикла. Код инициализации будет размещен перед циклом задачи и будет поэтому выполняться, только если задача первоначально создана ядром.
Единая команда Считывания и Записи. Современная архитектура имеет отдельные задачи для 1х считывания, 2х считывания, 1х записи и 2х записи. Более чем один тип носителя в каждый данный момент времени не может быть установлен в дисководе. Только одна функция, записи или считывания, может быть выполнена в каждый данный момент времени. Поэтому требуется только одна задача доступа к носителю - Задача Считывания/Записи.
Код инициализации этапа 2 будет только создавать единую задачу считывания/записи, называемую в данном обсуждении Задачей Дисковода. Дополнительные детали приведены ниже.
Инициализация Кассеты: Инициализация Кассеты выполняется при включении питания, когда кассета уже находится в дисководе или после включения питания, когда кассета введена. Современные архитектуры выполняют инициализацию в момент включения питания как часть Задачи Самозагрузки. Когда кассета введена после включения питания, инициализация выполняется как часть Программы Обработки Прерываний Дисковода, представляющая Программу Обслуживания Прерываний. Вследствие новой структуры прерываний с ЦАС и сообщений блокировки по времени функция инициализации кассеты должна выполняться как задача, так чтобы она могла принимать сообщение в свою очередь. (Только задачи имеют очереди). Код инициализации этапа 2 будет передавать сообщение в Задачу Дисковода выполнять инициализацию кассеты при включении питания и когда кассета введена. Инициализация кассеты обсуждается ниже более детально.
(SCSI) Задача Контроля: Обработка с Совпадением во Времени:
Контроль и Управление Состоянием Дисковода: Задача Контроля теперь обеспечивает поддержание переменной "состояние дисковода". Последующие разделы описывают соотношение между принятыми SCSI командами, состоянием дисковода, различными сообщениями, использованными во всей архитектуре дисковода. Как ранее упоминалось, таблица 44 содержит перечень состояний дисковода.
Команды, Не Связанные с Доступом к Носителю: Задача Контроля будет оставаться ответственной за выполнение команд, не требующих доступа к носителю, например, таких как Готовность Блока к Проверке, Запрос, Опознавание Режима.
Команда Запуска/Остановки Шпинделя: В современной архитектуре SCSI Задача Контроля выполняет Команду Запуска/Остановки Шпинделя. Для того чтобы обеспечить обработку с совпадением по времени, когда команда выполняется, эта команда должна выполняться отдельной задачей. Для Совместимости по архитектуре при выполнении инициализации кассеты имеется команда "Замедление вращения". Что касается Задач Низкого Уровня, см. ниже.
SCSI Поиск: Команда SCSI поиска будет теперь обрабатываться Задачей Дисковода. Это требуется для того, чтобы Задача Контроля могла обеспечивать поддержку совпадающей по времени обработке новых команд, когда они принимаются. Задача Контроля будет изменять состояние дисковода для "Поиска" и посылать сообщение в Задачу Дисковода выполнять поиск. Задача Дисковода будет возвращать сообщение "Статус Поиска" в Задачу Контроля для индикации того, что запрос удовлетворен.
Команды Доступа к Носителю: Задача Контроля будет обеспечивать передачу сообщения в Задачу Дисковода для каждой из команд считывания, верификации, стирания, записи, записи/верификации и форматирования. Задача Контроля будет устанавливать статус дисковода в "Считывание", "Запись", "Форматирование" по мере необходимости. Задача Контроля не будет блокировать свое выполнение при ожидании, когда Задача Дисковода удовлетворит запрос. Задача Дисковода будет возвращать сообщение о статусе в Задачу Контроля для указания, что запрос удовлетворен.
Состояние Считывания и Кэширования: Когда запрос считывания принят от инициатора. Задача Контроля будет проверять, разрешила ли текущая Страница Режимов 08h кэширование при считывании. Если оно разрешено и нет других команд в очереди, Задача Контроля будет передавать сообщение в Задачу Дисковода начать обработку запроса считывания и после осуществления запустить Кэш Опережающего Считывания. Состояние дисковода в этот момент изменится на "Считывание с кэшированием". Если другие команды присутствуют в очереди. Задача Контроля должна определять, не препятствует ли следующая команда кэшированию. Если это так, то в Задачу Дисковода посылается сообщение начать обработку запроса считывания и при осуществлении этого запустить Кэш Опережающего Считывания. Состояние дисковода в этот момент изменяется на "Считывание с Кэшированием". Если бы другие команды присутствовали в очереди, то Задача Контроля определяла бы, не препятствует ли следующая команда кэшированию. Если это так, то сообщение, посылаемое в Задачу Дисковода, должно указывать, что кэширование не было запущено и состояние дисковода должно быть установлено в "Считывание без кэширования".
Если бы считывание с кэшированием было разрешено и запущено и затем была бы принята другая команда, то Задача Контроля (выполняющаяся с совпадением во времени) должна была определить, не следует ли остановить Кэширование с Опережающим Считыванием. Если бы принятая команда была, например, запросом записи, то Задача Контроля послала бы сообщение в Задачу Дисковода прервать Кэширование с Опережающим Считыванием и сделать недействительными данные в кэше. Если бы принятая команда была командой запроса считывания, то Задача Контроля послала бы сообщение в Задачу Дисковода остановить Кэширование Опережающего Считывания и сохранить данные в кэше. Вопрос обработки сообщений Прерывания Дисковода, относящийся к вышеизложенному, будет рассмотрен ниже.
Состояние Записи и Кэширование: Когда запрос записи принят от инициатора, Задача Контроля будет проверять, разрешила ли текущая Страница Режимов 08h выборочное кэширование. Если разрешение дано и нет других команд в очереди, то Задача Контроля будет посылать сообщение в Задачу Дисковода обрабатывать запрос записи, как это необходимо. Состояние дисковода в этот момент будет изменено на "Запрос записи с кэшированием". Если бы другие команды присутствовали в очереди. Задача Контроля определяла бы, не препятствует ли следующая команда кэшированию. Если это так, то сообщение, переданное в Задачу Дисковода, должно указывать, что кэширование не пригодно и состояние дисковода будет установлено в "Запрос записи без кэширования".
Если бы кэширование при записи было разрешено и другая команда была бы принята, то Задача Контроля (выполняющаяся одновременно) определяла бы, не следует ли остановить кэширование при записи. Если бы принятая команда была, например, запросом считывания, то Задача Контроля послала бы сообщение в Задачу Дисковода остановить Кэширование при записи и сбросить данные в кэше на носитель. Если бы принятая команда была запросом записи, то Задача Контроля не предпринимала бы никаких действий кроме постановки команды в очередь для обработки после того, как текущий запрос удовлетворен. Соответствующий вопрос обработки сообщений Прерывания Дисковода будет обсужден ниже.
Катастрофические События: Катастрофические события определены как SCSI Сброс Шины или Запрос Понижения Мощности с проигрывателя-автомата. Когда одно из этих событий происходит, Программа обслуживания немаскируемых прерываний будет вызываться для передачи сообщения в Задачу Контроля. Основываясь на состоянии дисковода, Задача Контроля будет предпринимать корректирующие действия, описанные ниже.
Когда принято сообщение "SCSI Сброс Шины", Задача Контроля будет проверять текущее состояние дисковода. Если дисковод находится в текущем состоянии "Записи", то сообщение "Подавить Кэш Записи" будет передано в Задачу Дисковода и состояние дисковода изменится на "Подавить Кэш Записи и затем Сброс". Когда Задача возвращает сообщение "Статус Подавления", Задача Контроля будет исследовать Бит Сброса в байте 14 Страницы Уникальных Режимов Поставщика 21h. Если конфигурирован жесткий сброс, то Задача Контроля устанавливает состояние дисковода в "Жесткий Сброс" и затем инициирует жесткий сброс путем перескока к адресу самозагрузки (0FFFF0h). Если конфигурирован программируемый сброс, то Задача Контроля устанавливает состояние дисковода в "Программируемый Сброс" и затем инициирует программируемый сброс. Если сообщение "SCSI Сброс Шины" принято и дисковод находится в текущем состоянии "Считывание", то Задача Контроля будет исследовать Бит Сброса в байте 14 Страницы Уникальных Режимов Поставщика 21h и инициировать жесткий или программируемый сброс, как указано.
Когда принято сообщение "Запрос Понижения Мощности", Задача Контроля будет исследовать текущее состояние Дисковода. Если дисковод находится в текущем состоянии "Запись", то сообщение "Подавить Кэш Записи" будет передано в Задачу Дисковода и состояние дисковода изменяется на "Подавить Кэш Записи, затем Понижение Мощности". Когда Задача Дисковода возвращает сообщение "Состояние Подавления", то Задача Контроля будет изменять состояние дисковода на "Понижение мощности" и выдавать соответствующий сигнал подтверждения PWRDNACK на 20-штыревой соединитель. Когда принято сообщение "Запрос Понижения Мощности" и дисковод находится в состоянии "Считывание", то Задача Контроля будет устанавливать состояние дисковода в "Понижение Мощности" и выдавать сигнал PWRDNACK на 20-штыревой соединитель. Замечание: Дополнительные действия следует предпринять после выдачи сигнала PWRDNACK или остающихся ограничений.
Упорядочение Команд в Очередь: Тегированное или нетегированное упорядочение в очередь. Каждый из этих вопросов является фактором проектирования и не должен препятствовать практическому осуществлению специалистами настоящего изобретения в том виде, как оно здесь раскрыто.
Задача Дисковода: Задача Дисковода будет выполнять инициализацию кассеты, SCSI поиск, все функции доступа к носителю и кэширования. Требуется единственная задача, поскольку только один тип доступа к носителю может иметь место в каждый данный момент времени и только один тип кэширования поддерживается в каждый данный момент времени. Задача Контроля будет передавать сообщения в задачу Дисковода для запроса соответствующего обслуживания.
Обслуживание SCSI команд: Когда Задача Дисковода принимает сообщение, запрашивающее обслуживания для SCSI команды (поиск, считывание/верификация, стирание/запись, форматирование), программное обеспечение Задачи Дисковода будет ответвляться к соответствующему маршруту для считывания, записи, форматирования или затем для носителей типа 1х, 2х или 4х. Код для каждого типа носителя будет поддерживаться как отдельный набор модулей по причинам обслуживания и стабильности, как и раньше.
Инициализация кассеты: Функция инициализации кассеты будет выполняться Задачей Дисковода, если принято сообщение от Задачи Контроля при включении питания. Когда кассета введена после включения питания, Программа обработки Прерываний Дисковода будет посылать сообщение "Кассета введена" в Задачу Контроля. Задача Контроля будет изменять состояние дисковода на "Загрузка Кассеты" и посылать сообщение "Запрос Инициализации Кассеты" в Задачу Дисковода. Задача Дисковода, в свою очередь, будет посылать сообщение "Запрос Запуска/Остановки Шпинделя" в Задачу Низкого Уровня, как описано ниже. Как только кассета успешно загружена и раскручена до требуемой скорости, Задача Дисковода будет определять тип кассеты и формат носителя, считывать Дефектные Области Управления, перезаписывать такие области при необходимости и инициализировать структуры устранения дефектов. После того как процесс инициализации завершен, Задача Дисковода будет отвечать сообщением "Инициализировать статус Кассеты", передаваемым в Задачу Контроля. Состояние дисковода будет затем изменено на "Ожидание".
Считывание и Кэширование с Опережающим Считыванием: Код считывания в Задаче Дисковода обеспечивает управление процедурой считывания, Кэшированием с Опережающим Считыванием, определяя, когда имело место результативное обращение в кэш, или принимая решение о доступе к носителю. Сообщения с Задачи Контроля будут управлять действиями Задачи Дисковода по считыванию, кэшированию или не использованию кэширования.
Когда Задача Дисковода получает сообщение о выполнении считывания, сообщение будет указывать, следует ли запустить кэширование после того, как считывание закончено. Сообщение "Запрос считывания без кэширования" показывает, что Задача Дисковода не должна планировать кэширование каких-либо данных. Сообщение "Запрос считывания с кэшированием" указывает, что Задача Дисковода должна планировать расширить считывание с кэшированием. Если любое из этих сообщений принято Задачей Дисковода, то Задача Контроля уже установит состояние дисковода в соответствующее состояние считывания.
Задача Дисковода может принимать другие сообщения при выполнении считывания без кэширования для игнорирования начального запроса кэширования и не расширяя считывание. Если принято сообщение "Остановить кэширование при считывании", Задача Дисковода будет удовлетворять только некэшированную часть считывания. Если кэширование еще не началось, то Задача Дисковода не будет запускать опережающее считывание. Если кэширование уже началось, то опережающее считывание будет отключено и все кэшированные данные будут сохранены. Диаграмма состояний Режима Считывания показана на фиг.122. Если принято сообщение "Прерывание кэша считывания", Задача Дисковода будет удовлетворять только некэшированную часть считывания. Если кэширование не началось, то Задача Дисковода не будет запускать опережающее считывание. Если кэширование уже началось, то опережающее считывание будет отключено и все кэшированные данные будут недействительными.
Кэш Опережающего Считывания будет буферизовать сектора с последнего LВA, АВА или сектора слежения, пока не произойдет следующее: 1) будет принято сообщение "Остановить кэширование при считывании", "Прервать кэширование при считывании", 2) будет удовлетворено условие максимальной упреждающей выборки, 3) не останется свободного пространства в буферном ЗУПВ, 4) сектор не сможет быть восстановлен в пределах текущих порогов.
Задача Дисковода при необходимости должна сохранять метку Трассировщика Прерываний Дисковода. Если Прерывание Дисковода происходит при выполнении опережающего считывания, Задача Дисковода должна определить условия прерывания, осуществлять соответствующие действия для их сброса и начать операции восстановления. Манипулирование меткой Трассировщика Прерываний Дисковода описано ниже.
Кэширование при записи: Данное обсуждение будет осуществляться со ссылками на фиг.123. Код записи в Задаче Дисковода обеспечивает принятие решения, когда осуществить доступ к носителю, управление кэшированием при записи, управление временем ожидания буфера кэша записи и подавление кэша записи. Сообщения от Задачи Контроля должны управлять действиями процедуры записи.
Если Задача Дисковода принимает сообщение о выполнении записи, то сообщение будет показывать, могут ли данные быть кэшированы. Сообщение "Запрос записи с кэшированием" указывает, что Задача Дисковода может кэшировать данные в зависимости от Флага Незамедлительности в CDB и текущего содержимого Кэша Записи. Сообщение "Запрос Записи без Кэширования" указывает, что Задача Дисковода может не кэшировать данные при любых обстоятельствах.
Задача Дисковода может принимать другие сообщения при выполнении кэшированной записи для подавления содержимого Кэша Записи. Если принято сообщение "Остановить Кэширование При Записи", то Задача Дисковода будет удовлетворять текущий запрос записи и затем сбрасывать все кэшированные данные на носитель. Если принято сообщение "Подавление Кэша Записи", то Задача Дисковода будет удовлетворять текущий запрос записи, если он находится в процессе исполнения и затем сбрасывать все кэшированные данные на носитель, или если нет текущего запроса, то все кэшированные данные будут сброшены на носитель.
Функцией Кэширования при Записи является использование преимуществ когерентности данных с множества SCSI запросов записи. Сектора с множеством запросов, которые представляют непрерывную область, могут быть объединены в один доступ к носителю, что обеспечивает меньшие непроизводительные затраты при обработке. Сектора, которые являются непрерывными, могут быть кэшированы. Сектора, которые занимают несколько несмежных областей, обуславливают то, что сектора, находящиеся в кэше, потребуют большего времени на перенос на носитель.
Данные могут остаться в буферном ЗУПВ до максимального времени, как определено Максимальным Временем Ожидания Буфера в Странице Режимов 21h. Если запрос записи кэшированный, то Задача Дисковода будет запрашивать, чтобы Программа Обслуживания Таймера передала сообщение спустя определенное время, установленное Временем Ожидания Буфера. Если Задача Дисковода получает сообщение о блокировке по времени, прежде чем данные будут перенесены на носитель (вследствие несмежного характера последовательных запросов), то Задача Дисковода будет начинать перенос данных (и всех непрерывных данных) на носитель. Если данные были перенесены на носитель в сектора, представляющие собой несмежные области, то Задача Дисковода будет запрашивать, чтобы программа обслуживания таймера не передавала сообщение блокировки по времени, запрошенное ранее.
Требуется только одна блокировка по времени в каждый данный момент времени для контроля времени ожидания буфера. Единственная блокировка по времени соответствует первому запросу записи, который кэширован. Если последующий запрос является непрерывным, то запрос будет кэширован с первым и записан на носитель в соответствии с первым запросом, т.е. при единственной блокировке по времени. Если бы последующий запрос не был бы непрерывным, то первый запрос был бы записан на носитель, его блокировка по времени была бы отменена и была бы запрошена новая блокировка по времени для следующего запроса.
Задача Дисковода, при необходимости может сохранить метку Трассировщика Прерывания Дисковода. Если Прерывание Дисковода возникло при выполнении Кэширования при Записи, то Задача Дисковода должна определять условие прерывания, осуществлять соответствующие действия для их сброса и начинать операции восстановления. Манипулирование метками Трассировщика Прерываний Дисковода будет описано ниже.
Задача Низкого Уровня: Задача Низкого Уровня при современном проектировании обеспечивает обработку системных запросов считывания, верификации, стирания, записи или особой стратегии восстановления секторов. Эти запросы используются при считывании Дефектных Областей Управления, при распределении сектора, при автоматическом перераспределении сектора, при восстановлении ошибок записи и при восстановлении ошибок считывания. Новыми функциями для Задач Низкого Уровня являются обработка Запросов Запуска/Остановки Шпинделя и Запросов Выталкивания Кассеты.
При требовании совпадающей по времени обработки Задача Контроля не может осуществлять упорядоченный опрос относительно событий, связанных с операциями для шпинделя или с операциями выталкивания, когда она ожидает новых SCSI команд или при блокировке по времени. Следовательно, эти функции передаются в Задачу Низкого Уровня. Задача Низкого Уровня имеет свою собственную очередь и может блокироваться при ожидании возникновения различных событий.
Когда Задача Низкого Уровня получает "Запрос Запуска/Остановки Шпинделя", она будет выдавать Команды Дисковода для запуска или остановки шпинделя и затем контролировать блокировку по времени. Когда принята Команда Дисковода о запуске шпинделя, Программное обеспечение Команд Дисковода будет выдавать соответствующую команду о скорости на микросхему управления приводом шпинделя. Команда будет выдаваться в ЦПС для контроля скорости шпинделя и выдачи прерывания, когда шпиндель достигнет требуемой минимальной скорости.
Для контроля времени, требуемого для функции запуска шпинделя, Задача Низкого Уровня будет выдавать запрос в Программу Обслуживания Таймера для приема сообщения в определенное время (TBD). Задача Низкого Уровня затем будет ожидать одного из двух сообщений. Когда ЦПС представляет прерывание для случая достижения шпинделем заданной скорости, будет вызываться Программа Обработки Прерываний Дисковода. Задача Низкого Уровня в качестве зарегистрированного приемника сообщений Прерываний Дисковода будет получать сообщение "Заданная Скорость Шпинделя". Программа Обслуживания Таймера будет уведомляться, что сообщение блокировки по времени шпинделя больше не требуется и сообщение "Статус Запуска/Остановки Шпинделя" будет возвращено в Задачу Контроля. Если принято сообщение блокировки по времени шпинделя, то шпиндель не достиг заданной скорости. Будет выдана Команда Дисковода для остановки шпинделя и сообщение "Статус Запуск/Остановка Шпинделя" будет передано в Задачу Контроля. В настоящее время обсуждается, следует ли контролировать функцию остановки шпинделя.
Программа Обслуживания Таймера: Обслуживание Таймера является новым видом обслуживания, предоставляемым Jupiter-1. Программа Обслуживания Таймера предусматривает специализированное использование Таймера 1 и Таймера 2. Таймер 0 предоставлен в распоряжение для использования в любое время программным обеспечением. Программа Обслуживания Таймера обеспечивает передачу сообщения запросчику спустя определенное время. Если множество запросов перекрываются, то Программа Обслуживания Таймера обеспечивает управление отдельными запросами и формирование сообщений в корректно определенное время.
Программа Обслуживания Таймера будет принимать два типа запросов: Ввести Событие Таймера и Удалить Событие Таймера. Если принят запрос Ввести Событие Таймера и нет ожидающих выполнения запросов, то Программа Обслуживания Таймера будет запускать таймер на заданное полное количество временных отметок, разрешать прерывание таймера, размещать запрос в начало своего перечня событий таймера и возвращаться к вызывающему оператору для обработки события таймера. Когда происходит прерывание таймера, Программа Обслуживания Таймера будет удалять запрос из начала списка событий таймера и посылать сообщение запросчику. Когда Программа Обслуживания Таймера получает запрос о событии таймера, когда имеются одно или более ожидающих выполнения запросов, то Программа Обслуживания Таймера будет помещать запрос в список событий таймера, ранжируя в соответствии с увеличением задержек. Все события таймера в списке будут обрабатываться с интервалами "дельта" по времени. Если запрашивается новое событие, которое помещается перед существующим событием, то для существующего запроса и всех последующих событий в списке будут заново вычислены их новые интервалы "дельта". Если новый запрос принят с меньшей блокировкой по времени, чем текущий запрос в начале очереди, то таймеры будут перепрограммироваться и новые интервалы "дельта" будут последовательно определены для всего списка.
Если принят запрос Удалить Событие Таймера, то Программа Обслуживания Таймера будет использовать основу, полученную от запроса Ввести Событие Таймера, для идентификации события таймера и удаления его из перечня событий таймера. Если удаляемое событие было в начале списка событий таймера, то таймеры будут перепрограммироваться для оставшегося времени для следующего события в списке и новый интервал "дельта" будет последовательно определен для всего списка. Если удаляемое событие было в середине списка, то интервал "дельта" для удаленного события будет последовательно смещен вниз по списку.
Программа обслуживания прерываний для случая немаскирующих прерываний: Если возникает событие в виде Базы SCSI Шины или Запроса Понижения Мощности от проигрывателя-автомата, то будет вызвана Программа Обслуживания Прерываний для немаскирующих прерываний. Эта Программа будет запрашивать СЛС об определении источника прерывания и затем посылать сообщение в Задачу Контроля. Основываясь на принятом сообщении, Задача Контроля будет предпринимать корректирующие действия, описанные выше.
Если бит Сброса SCSI Шины в регистре СЛС подтвержден, то Немаскирующее Прерывание было обусловлено командной строкой Сброс SCSI Шины и сообщение "Сброс SCSI шины" будет передано в Задачу Контроля. Если бит Сброса Проигрывателя-автомата в регистре СЛС подтвержден, то Немаскирующее Прерывание было обусловлено командной строкой Сброса Проигрывателя-автомата и сообщение "Сброс Проигрывателя-автомата" будет передано в Задачу Контроля. Если Запрос Понижения Мощности Проигрывателя-автомата в регистре СЛС подтвержден, то Немаскирующее Прерывание было обусловлено командной строкой PWRDNREQ Проигрывателя-автомата и сообщение "Запрос Понижения Мощности Проигрывателя-автомата" будет передано в Задачу Контроля.
Прерывания Дисковода: Прерывание Дисковода представляет собой исключительное событие, относящееся к дисководу, такое как ошибка трекинга, ошибка поиска, запрос выталкивания кассеты. В этом разделе рассматривается механизм, требуемый для уведомления программного обеспечения, что произошло Прерывание Дисковода и какие сообщения должны быть сформированы при таких условиях.
Уведомление о Прерываниях Дисковода: Если происходит Прерывание Дисковода, то требуются различные процедуры восстановления, в зависимости от того, что делал дисковод при возникновения такого события. Например, если дисковод находился в режиме ожидания и в результате "толчка" обусловил смещение трекинга, то нет необходимости в восстановлении. Если, с другой стороны, происходило считывание, то дисковод должен потребовать повторного поиска и затем продолжить операцию считывания.
Только текущая задача, взаимодействующая с дисководом, имеет возможность предпринять необходимые меры для восстановления, основываясь на том, какая задача осуществлялась. Поэтому уведомление о том, что имело место Прерывание Дисковода, должно быть доставлено в текущую задачу, взаимодействующую с дисководом. Так как это не всегда может быть текущая выполняемая задача, каждая задача должна идентифицировать, когда она отвечает за Прерывания Дисковода. Первым механизмом уведомления поэтому является направление сообщения в соответствующую задачу, несущую такую ответственность, при возникновении Прерывания Дисковода. Упомянутая задача идентифицируется переменной task_id_router, которая совместно управляется всеми задачами.
Первый механизм основывается на каждой задаче, ожидающей приема сообщений, одно из которых может быть сообщением Прерывания Дисковода. Если программное обеспечение не ожидает сообщения, остановка для осуществления упорядоченного опроса означала бы существенную потерю вычислительных ресурсов. Второй используемый механизм уведомления не основывается на опросе задачи для определения события Прерывания Дисковода. В критических точках программного обеспечения задача может заносить в регистр часть кода для векторизации при возникновении Прерывания Дисковода. Если такое прерывание отсутствует, то не потребуется дополнительного времени помимо затрат на загрузку/выгрузку из регистра.
Обработка Прерываний Дисковода и Совпадение во времени: Программа Обработки Прерываний выполняется как Программа Обслуживания Прерываний, сначала как такая Программа с малым ядром при блокировании прерываний, а затем как более крупная программа обработки с разрешенными прерываниями. В последующем Примере 1 приведена иллюстративная ситуация.
Пример 1
Осуществляется поиск и SCSI прерывания блокированы. Дисковод имеет ошибку поиска, и таким образом возникает Прерывание Дисковода. Программа Обработки Прерываний Дисковода будет запускаться как Программа Обслуживания Прерываний. Если бы другая SCSI команда поступила, то аппаратные средства обрабатывали бы первые шесть байтов. Остальные байты ожидали бы Программированного Ввода/Вывода в Программу Обслуживания Прерываний SCSI после того, как функция Прерывания Дисковода разрешит прерывания. Так как дисковод находился в режиме поиска, то SCSI прерывания будут маскироваться. Поэтому все время, когда выполняется восстановление с помощью Программы Обработки Прерываний Дисковода (включая повторные обращения, если необходимо), то SCSI шина могла бы поддерживаться в середине команды.
События и Сообщения функции Прерывания Дисковода:
Определяет источник прерывания.
Посылает сообщение текущему зарегистрированному приемнику сообщений Прерываний Дисковода.
Посылает сообщения для команд Запрос Выталкивания Кассеты с Проигрывателя-автомата, Запрос Выталкивания Кассеты с Передней Панели, Установлена Скорость Шпинделя, Ограничение Выталкивания.
Не выполняет автоматической раскрутки и инициализации при введении кассеты.
Маршрутизация Прерываний Дисковода и Кэширование: Задача Контроля посылает TCS для аннулирования Кэша Опережающего Считывания, если требуется метка Трассировщика Прерываний Дисковода.
Задача Дисковода должна оставаться зарегистрированной в качестве задачи для приема сообщений Прерываний Дисковода, когда она выполняет Кэширование с Опережающим Считыванием. Если произошло Прерывание Дисковода (например, ошибка трекинга), то потребуется Задача Дисковода для осуществления корректирующих действий. Задача Контроля должна подать сообщение в Задачу Дисковода для сообщения ей о необходимости прекращения и возврата метки Трассировщика Прерываний Дисковода.
SCSI Перенос: Режим Программированного Ввода/Вывода: Если перенос превышает определенное количество (TBD) байт, копировать данные в Буферном ЗУПЗ и затем оттуда вывести Дефектные Области Управления.
SCSI Сообщения: Сброс компонентов Шины, Завершить Ввод/Вывод, Прекратить.
События: Список Событий.
Типы Сообщений:
Типы Источников Текущих TCS
SCSI_TCS Пропустить запрос от Задачи Контроля в Задачу Дисковода
ATTN_TCS От Программы Обработки Прерываний Дисковода
LL_RD_TCS Запрос для Считывания Низкого Уровня
LL_WR_TCS Запрос для Записи Низкого Уровня
ERCVRY_TCS Запрос для Восстановления Ошибки Сектора
Следует заменить на:
Сообщения
SCSI Сброс Шины
Сброс с Проигрывателя-автомата
Запрос Понижения Мощности с Проигрывателя-автомата
TCS Прерывания Дисковода
Ошибка (Ошибка Поиска, Ошибка фокусировки, Ненадлежащая скорость кассеты и т.д.)
Кассета в горловине
Кассета на втулке
Запрос Выталкивания Кассеты (с проигрывателя-автомата или с передней панели)
Ограничение Выталкивания
Требуемая Скорость Шпинделя
Запрос События Таймера
Возникло Событие Таймера
Запрос Запуска/ Остановки Шпинделя
Статус Запуска/Остановки Шпинделя (корректно, ошибка)
Запрос Выталкивания Кассеты
Статус Выталкивания Кассеты (корректно, ошибка)
Запрос Инициализации Кассеты
Статус Инициализации Кассеты (корректно, ошибка, тип кассеты)
Метка Трассировщика Прерываний Дисковода
Возврат Метки Трассировщика Прерываний Дисковода (DAR)
Метка DAR возвращена Запрос Поиска
Статус Поиска (метка DAR возвращена)
Запрос Считывания с кэшированием
Запрос Считывания без кэширования
Статус Считывания
Остановка Кэширования При Считывании (Запрос Считывания последует)
Прервать Кэширование При Считывании, подавить Кэш Считывания
Запрос Записи с Кэшированием
Запрос Записи без Кэширования
Статус Записи
Остановка кэширования при Записи (закончить запись и подавить Кэш Записи)
Запрос Таймерной Записи (записать выбранную часть Кэша Записи на носитель)
Подавить Кэш Записи (Сброс или Запрос Понижения Мощности)
Статус Подавления
Требования к аппаратному обеспечению: 1) 2К ЗУПВ для затенения энергонезависимого ЗУПВ для быстрого доступа к сохраненным данным. Это позволяет удовлетворять требованиям для неразъединяющих команд (например, Опознавание Режима, Опознавание Регистрации). 2) Счетчик Прошедшего Времени для счета часов включения питания.
Электронные схемы
Электронные схемы дисковода состоят из трех блоков схем: интегральная схема электродвигателя шпинделя, показанная на фиг.101A-101G, схема с гибкими выводами с предусилителями, показанная на фиг. 102-105, и главная схемная плата, содержащая большинство функциональных элементов дисковода, показанная на фиг.106А- 1119.
Интегральная схема платы электродвигателя шпинделя
Плата электродвигателя шпинделя имеет три функции. Одна функция связана с приемом сигналов исполнительного механизма на соединителе J2 (фиг.101А) и пропускание их на главную плату через соединитель J1 (101G). Другими функциональными элементами платы являются бесщеточный возбудитель электродвигателя шпинделя и предусилитель грубого датчика положения. Эти особенности детально описаны ниже.
Показанная на фиг.101А-С схема обеспечивает возбуждение двигателя шпинделя. Схема возбудителя шпинделя содержит каскад U1 (фиг.101), который представляет собой бесщеточный возбудитель, и различные компоненты для стабилизации двигателя шпинделя (двигатель не показан). Схема U1 является программируемой и использует тактовый сигнал 1 МГц, подаваемый с главной платы. Схема U1 посылает импульс FCOM сигнала на главную плату, так что главная плата может контролировать скорость шпинделя.
Схемы, показанные на фиг.101А-С, обеспечивает формирование грубого значения ошибки позиционирования. Операционные усилители U2 и U3 формируют сигнал ошибки. Схемы U2 и U3 используют источники питания 12 В и +5 В. Источник +5 В используется в качестве опорного. Опорный сигнал распространяется через ферритовую шайбу к входным выводам 3 и 5 каскада U3, который имеет резисторы обратной связи R18, R19 на 487 К и конденсаторы С19 и С20 на 47 пФ, соединенные параллельно. Два усилителя с импедансной связью U3A, U3B принимают входной сигнал с позиционно-чувствительного детектора, расположенного в исполнительном механизме (не показан). Детектор подобен многоканальному фотодиодному детектору. Усилитель U2A дифференциально усиливает выходные сигналы со схем U3A, U3B с усилением 2. Выходной сигнал с U2A передается на главную плату в качестве грубого значения ошибки позиционирования.
Другой операционный усилитель U2B имеет опорный уровень на входном выводе 6, формируемый резисторами R23, R17. Этот опорный уровень требует, чтобы суммарный выходной сигнал усилителей с импедансной связью U3A,U3B в точке 5 U2B был бы тем же самым, что и в точке 6 делителя на резисторах R23, R17. Конденсатор С21 в цепи обратной связи обуславливает действие U2B в качестве интегратора, возбуждая при этом транзистор Q3 через резистор R21. Транзистор Q3 возбуждает светодиод, который излучает свет к фотодиоду (не показан). Именно эта замкнутая система на в основном замкнутом контуре гарантирует определенный уровень напряжения на выходах усилителей U3A, U3B.
В соответствии с фиг.101А-G, другие функциональные возможности этой платы связаны с приводом выталкивания дисковода. Возбудитель двигателя представляет собой каскад, выполненный по схеме Дарлингтона Q1 (Фиг.101Е), ограниченный по току транзистором Q2, как определено резистором R7. Диод D1 и С11 являются шумоподавителем для двигателя (не показан). Положение механизма выталкивания кассеты определяется посредством датчика на эффекте Холла U4 (фиг.101D), обеспечивающего определение положения зубчатой передачи в процессе выталкивания кассеты. Имеются три переключателя WP-SW, CP-SW, FP-SW на плате, предназначенные для обнаружения наличия защиты от записи на кассете, наличия кассеты и наличия запроса с переключателя передней панели о выталкивании кассеты с помощью главного процессора.
Предварительные усилители
Описаны два варианта выполнения предварительных усилителей. Общие элементы показаны на фиг.102А-D и 103A-D. Различные элементы для двух вариантов выполнения показаны на фиг.104А-105В.
Гибкий вывод оптического модуля, показанный на фиг.102А-105В, имеет три основные функции. Одна реализуется усилительной секцией с импедансной связью, другая - предварительным усилителем канала считывания и третья - возбудителем лазера.
На фиг.102А представлен соединитель J4; сигналы, приходящие с U1 (102В), сформированы за счет импедантной связи. TD и RD являются двумя квадратурными детекторами для сигналов следящей системы. При первоначальной юстировке XI не соединен с Х2, так что отдельные квадратурные детекторы могут быть отъюстированы по отдельности. После этого вывод 1 XI соединяется с выводом 1 Х2, вывод 2 XI - с выводом 2 Х2 и т.д. Суммы токов двух квадратурных детекторов затем усиливаются в усилителях с импедансной связью U1A-U1D. Четыре квадратурных сигнала создают сигналы системы слежения на главной плате. Усиление с импедансной связью в усилителях U1A-U1D осуществляется с использованием резисторов на 100 кОм RP1A, RP1B, RP1C, RP1D с параллельно включенными конденсаторами С101-С104 на 1 пФ.
Фотодиод FS (фиг.102А) представляет собой чувствительный к входному воздействию диод. Ток, чувствительный к входному воздействию, является индикацией мощности на выходе лазера и передается на главную плату через соединитель J4 на вывод 15.
Как показано на фиг. 102В, U106 соединен с J103, который представляет собой еще один квадратурный детектор, два квадранта которого используются для формирования дифференциального магнитооптического сигнала и суммарного сигнала. VM8101, U106 представляет собой предварительный усилитель, специально предназначенный для магнитооптических возбудителей и является усилителем с импедансной связью. Сигналы считывания (+/-) с U106 могут переключаться между значениями разностного и суммарного сигнала с помощью сигнала предварительного формирования, приходящего с вывода 6 соединителя J103.
На фиг. 103A-D представлены преобразователи уровня U7B, U7C, U7D для уровня записи, представляющие собой три дифференциальных усилителя, которые скомпенсированы для обеспечения устойчивости с использованием больших емкостных нагрузок. Резисторы и конденсаторы, соединенные с U7B, U7C, U7D, обеспечивают стабилизацию. Эти дифференциальные усилители имеют усиление 1/2 для установки уровней записи для баз транзисторов Q301, Q302, Q303, Q304, Q305, Q306, представленных на фиг.104А-В. Имеется три уровня записи: уровень записи 1, уровень записи 2, уровень записи 3, которые позволяют обеспечивать разные уровни записи для различных импульсов в импульсной последовательности, которая будет осуществлять запись магнитооптических сигналов.
Четвертый операционный усилитель U7A (фиг.103С) устанавливает уровень тока считывания. U7A возбуждает Q12, и ток соответственно отражается в выходных сигналах транзисторов Q7, Q8, Q9. Этот ток в Q7, Q8 является реальным током считывания, передаваемым к лазеру.
Система с оптическими дисками, выполненная согласно изобретению, включает комбинацию, содержащую лазер, первое средство для пропускания электрического тока к лазеру, цифровое логическое средство для переключения мощности первого средства для возбуждения лазера, причем электрическая мощность потребляется, только когда лазер возбуждается, благодаря чему улучшаются характеристики нарастания и спада при переключении. В предпочтительном варианте выполнения цифровое логическое средство включает буферные каскады на КМОП-структурах, U301, U302, как показано на фиг.104А и 104В, которые могут быть включены между электрическим заземлением и полным напряжением питания. Кроме того, первое средство предпочтительно выполнено с использованием проходных транзисторов Q301-Q306 (фиг.104А-В).
В соответствии с другим аспектом заявленной системы с оптическими дисками, имеющей механизм фокусировки, механизм трекинга, линзу и считываемый диск, упомянутые механизмы управляются посредством цепи обратной связи. Предпочтительный вариант осуществления данной цепи обратной связи включает электронную схему для формирования сигнала следящей цепи для осуществления коррекции механизма фокусировки и механизма трекинга, первое средство для пропускания электрического тока на лазер и цифровое логическое средство для переключения мощности первого средства для возбуждения лазера, причем электрическая мощность потребляется только в случае возбуждения лазера для обеспечения улучшения характеристик нарастания и спада при переключении. В данном варианте выполнения цифровое логическое средство может включать буферные каскады на КМОП-структурах, предпочтительно включенные между электрическим заземлением и полным питающим напряжением. Первое средство, как обсуждалось выше, может быть осуществлено с использованием проходных транзисторов.
На фиг. 104А-В представлены импульсные возбудители и средства включения лазера LD1. Лазер реально защищен вентилями на КМОП-структурах U301, U302A, чтобы гарантировать, что при нарастании уровня напряжения лазер не подвергался воздействию токовых выбросов. Каскад U302A обеспечивает низкий логический уровень, устанавливаемый по сигналу включения лазера, при этом U302A не будет отображать характер изменения тока (фиг.103А) до тех пор, пока шина разрешения считывания, выводы 1, 2 и 3 каскада U302A, не получит сигнал разрешения посредством высокого логического уровня на выводах 20, 21, 22 и 23 каскада U302A. Он также обеспечивает разрешение возбуждения лазера импульсами записи только после того, как лазер запущен. Запуск выполняется по входу 4 каскада U302A, который управляет входами каскадов 301А, 301В и 302В.
Разрешающие входы (выводы 13 и 24 каскадов U302 и U301 и вывод 24 каскада U301A) соответствуют сигналам записи для строба записи, строба записи 2 и строба записи 3 соответственно. Включение источников тока, формируемых транзисторами Q301-Q306, обеспечивает три уровня записи. Ферритовые шайбы 301 и 302 (фиг.104В) обеспечивают развязку тока считывания от тока записи, а также препятствуют наводке радиочастотной модуляции на кабелях.
В соответствии с фиг.105А-В6 каскад U303 представляет собой компонент IDZ3, выпускаемый компанией Hewlett Packard, являющийся заказной микросхемой, выполняющей функцию генерирования тока с частотой 460 МГц. Этот ток подается на лазер для радиочастотной модуляции для снижения шумов лазера. Его выход развязан посредством С307. Вход управления (вывод 1 каскада U303) предусмотрен для включения и выключения модуляции.
Настоящее изобретение предусматривает также усовершенствованный емкостный трехточечный генератор с параллельным питанием со сниженным импульсным переходным процессом. Генератор содержит резонансный контур для генератора с повышенным активным сопротивлением. Резонансный контур может также содержать индуктивность. В одном из аспектов настоящего изобретения генератор имеет повышенное напряжение питания, благодаря чему облегчается реализация увеличения амплитуды радиочастотной модуляции и снижения переходных процессов. В предпочтительном варианте осуществления электрическая схема усовершенствованного емкостного трехточечного генератора с параллельным питанием, как более подробно описано ниже, содержит транзистор, имеющий эмиттер, базу и коллектор, источник напряжения питания и резистор, включенный последовательно между коллектором и источником напряжения питания, при этом переходный процесс генератора снижается при приложении импульсов записи к генератору. Предпочтительно может быть предусмотрена нагрузочная индуктивность, включенная последовательно с нагрузочным резистором. В этом варианте импульсы записи подаются в точку соединения между нагрузочным резистором и нагрузочной индуктивностью, а резонансный контур с разделенным конденсатором может быть включен между коллектором и землей, параллельно эмиттеру и коллектору.
В другом варианте выполнения настоящего изобретения электрическая схема усовершенствованного емкостного трехточечного генератора с
параллельным питанием содержит транзистор, имеющий эмиттер, базу и коллектор, резонансный контур с разделенным конденсатором, включенный между коллектором и землей параллельно эмиттеру и коллектору, источник напряжения питания, нагрузочную индуктивность и нагрузочный резистор, включенные последовательно между коллектором и напряжением питания, благодаря чему переходный процесс генератора снижается при приложении импульсов записи к точке соединения между нагрузочным резистором и нагрузочной индуктивностью. Этот вариант также предусматривает повышенное напряжение питания, благодаря чему облегчается увеличение амплитуды радиочастотной модуляции и снижение переходных процессов. Данный емкостный трехточечный генератор с параллельным питанием с нагрузочным контуром, имеющим увеличенное активное сопротивление, может эффективно предусматриваться в комбинации с лазером и источником импульсов записи. В предпочтительном варианте осуществления нагрузочный контур также включает индуктивность.
Такая комбинация может как вариант включать лазер, источник импульсов записи, источник электрического напряжения питания, емкостный трехточечный генератор с параллельным питанием, содержащий транзистор, имеющий эмиттер, базу и коллектор, а также нагрузочное сопротивление, включенное последовательно между коллектором и напряжением питания, благодаря чему переходные процессы генератора снижаются при подаче импульсов записи к генератору. Он может содержать индуктивность резонансного контура, включенную последовательно с нагрузочным резистором, причем импульсы записи подаются в точку соединения между нагрузочным резистором и индуктивностью контура, и/или резонансный контур с разделенным конденсатором, включенный между коллектором и землей, параллельно эмиттеру и коллектору.
В еще одном варианте эта комбинация для использования в системе дисковода, соответствующей настоящему изобретению, содержит лазер, источник импульсов записи, емкостный трехточечный генератор с параллельным питанием, содержащий транзистор, имеющий эмиттер, базу и коллектор, и резонансный контур с разделенным конденсатором, включенный между коллектором и землей, параллельно эмиттеру и коллектору, источник напряжения питания, нагрузочную индуктивность и нагрузочный резистор, включенные последовательно между коллектором и напряжением питания, благодаря чему переходные процессы генератора снижаются при подаче импульсов записи в точку соединения между нагрузочным резистором и нагрузочной индуктивностью. Данный вариант также характеризуется повышенным нагрузочным активным сопротивлением и повышенным напряжением питания, благодаря чему облегчается реализация увеличения амплитуды радиочастотной модуляции и снижения переходных процессов. Способ снижения переходных процессов в емкостном трехточечном генераторе с параллельным питанием включает операции увеличения нагрузочного активного сопротивления в генераторе и увеличение напряжения питания генератора.
Как показано выше, заявлена система с оптическими дисками, имеющая механизм фокусировки и механизм трекинга, причем механизмы предпочтительно управляются по цепи обратной связи, содержащей электронную схему для формирования сигнала ошибки слежения для осуществления коррекции механизма фокусировки и механизма трекинга, лазер, источник импульсов записи, емкостный трехточечный генератор с параллельным питанием, имеющий эмиттер, базу и коллектор, резонансный контур с разделенным конденсатором, включенный между коллектором и землей, параллельно эмиттеру и коллектору, источник напряжения питания, индуктивность резонансного контура и нагрузочный резистор, включенные последовательно между коллектором и источником питания, благодаря чему обеспечивается уменьшение переходных процессов в генераторе при подаче импульсов записи в точку соединения между нагрузочным резистором и индуктивностью резонансного контура.
Как показано на фиг. 104, второй вариант использует емкостный трехточечный генератор с параллельным питанием на транзисторе Q400 (фиг.104В), разделенный конденсатор С403 и С402 и индуктивность L400. Эта схема использует напряжение смещения 12 В и резистивную нагрузку R400 2 К для обеспечения того, чтобы импульсы записи, поступающие через ферритовую шайбу FB301, не вызывали переходных процессов в схеме генератора. Блокировка генератора может быть обеспечена сигналом на базе путем закорачивания R402 на землю.
Известные схемы емкостного трехточечного генератора с параллельным питанием использовали напряжение питания 5 В и индуктивность вместо R400. Данная предложенная конструкция обеспечивает достаточный уровень амплитудной модуляции лазера для снижения шумов. В известной схеме, однако, переходные процессы имели место всякий раз при приложении импульсов записи. В настоящем изобретении импульсы записи не вызывают переходного процесса, так как индуктивность заменена на резистор R400. Для исключения переходных процессов и поддержания достаточного размаха тока между пиковыми значениями при радиочастотной модуляции потребовалось изменить напряжение питания с 5 В на 12 В и, соответственно, изменить номиналы всех резисторов.
Главная схемная плата
На фиг.106А-106С представлена главная схемная плата. Она содержит средства, реализующие функциональные возможности дисковода, не включенные в плату двигателя шпинделя, или предварительные усилители. Сюда относятся SCSI контроллер, кодеры/декодеры считывания и записи, канал считывания, следящие системы, усилители мощности и формирователи ошибок слежения.
На фиг.106А представлено соединение от схемы J1 предусилителя. Вывод 15 схемы J1 предусилителя представляет собой ток, чувствительный к входному воздействию с платы схемы предусилителя (фиг.102А). Резистор R2 (фиг.106А) сравнивает полученный выходной сигнал с отрицательным опорным напряжением. Операционный усилитель U23B буферизует этот сигнал, который измеряется АЦП U11 (фиг.110С-D).
Два резистора R58, R59 (фиг.106А) выполняют функцию резисторного делителя для получения точного разрешения уровня тока считывания лазера. Выходы с ЦАП U3 (фиг.110D) устанавливают ток считывания лазера. ЦПС U4 (фиг.110А-В) управляет преобразователями.
На фиг.106Е показан соединитель J6 для проведения проверки. Этот тестовый соединитель J6 обеспечивает последовательный канал обмена данными в режиме тестирования с процессором U38 (фиг.109А-В) через порты ввода/вывода U43 (фиг. 108А(1)-А(3)). Компаратор U29A (фиг.106F) формирует сигнал SCSI сброса для процессора.
Блок контроля мощности U45 (фиг.106С) контролирует мощность системы и поддерживает систему в исходном состоянии, пока напряжения питания 5 В и 12 В находятся в пределах допусков.
Соединитель J3F (фиг. 106Н) соединяет главную схемную плату с основным источником питания. Фильтры питающей мощности F1, F2 обеспечивают фильтрацию для главной схемной платы.
Элементы крепления МТ1, МТ2 шасси за счет емкостной развязки обеспечивают емкостную связь с землей главной схемной платы, обеспечивая развязку по переменному току шасси.
На фиг.107А-С показана SCSI схема контроля/управления буферными ЗУ U32. Эта схема выполняет функцию буферизации и управления командами для шины SCSI. Схема U19A обеспечивает растягивание сигнала обнаружения ID с U43 (фиг.108А). Согласно Фиг.107С, U41, U42, U44 представляют собой буферные ЗУПВ на 1Мб•9 для буферного ЗУ SCSI. На фиг.107В представлен восьмипозиционный переключатель с двухрядным расположением выводов S2. Переключатель S2 обеспечивает выбор параметров SCSI шины, таких как сброс и нагрузка.
На фиг.108А показана схема U43 кодирования/декодирования, представляющая собой часть контроллера SCSI. Схема кодирования/декодирования U43 выполняет кодирование/декодирование данных в RLL 2,7-коде и обеспечивает все необходимые сигналы, а также декодирует формат сектора для стандартных дисков формата ISO для типов дисков 1х и 2х 5-1/4 дюйм. Имеется также вход/выход общего назначения, который выполняет различные функции, включая обмен данными с различными последовательными устройствами, запуск возбудителя катушки смещения и определение полярности катушки смещения.
Энергонезависимое ЗУПВ небольшого объема U34 (фиг.1-8А(3)) обеспечивает запоминание параметров, специфических для диска. Эти параметры устанавливаются в процессе калибровки при изготовлении.
Блоки активной нагрузки SCSI U50, U51 (фиг.108В) могут быть включены посредством переключателя S2, показанного на фиг.107В.
Схема кодирования/декодирования U43 (фиг.108А) имеет специальный режим, который используется в дисководе, если на входе и выходе может быть разрешена комбинация бит NRZ. При таком разрешении заказная схема GLENDEC U100 (фиг. 115А-С) может использоваться для кодирования/декодирования в RLL 2,7-коде 4х-дисков. В этом режиме кодирования/декодирования схема U43 может обеспечивать использование многих других схем кодирования/декодирования для дисков с различными другими техническими характеристиками.
На фиг.109 показан системный управляющий процессор 80С188. Он работает с частотой 20МГц, использует программируемую память U35, U36 на 256 кбайт и ЗУПВ U39, U40 на 256 кбайт (фиг.109С-В). Системный управляющий процессор U38 управляет функциями дисковода. Он представляет собой универсальный процессор и может быть запрограммирован для обработки различных форматов и удовлетворения различных требований потребителя. Различные форматы дисков могут обрабатываться при соответствующей аппаратной поддержке и использовании систем кодирования/декодирования.
На фиг.110 показан контроллер слежения U4 TI TMS 320C50 ЦПС, многоканальный по входу АЦП U11 для преобразования сигналов ошибки слежения и 8-канальный 8-битовый ЦАП U3 для формирования сигналов следящего управления дисководом и установки уровней. Следящий контроллер U4 ЦПС получает сигналы от АЦП U11 и выдает на выходе сигналы на ЦАП U3.
Контроллер U4 управляет такими функциями, как контроль скорости шпинделя с помощью сигнала на выводе 40 контроллера U4 ЦПС. Он также определяет, находится ли дисковод в режиме записи или считывания по управляющему сигналу на выводе 45. Он обменивается данными с процессором U38 посредством схемы U100 (фиг.115А-С). Контроллер U38 выполняет следящее управление точным трекингом, следящее управление грубым трекингом, следящее управление фокусировкой, управление мощностью считывания лазера и управление выталкиванием кассеты. Контроллер U38 также контролирует скорость шпинделя, проверяя, находится ли скорость вращения диска в заданных пределах. АЦП U11 выполняет преобразование сигналов фокусировки, трекинга и грубого позиционирования. Преобразования сигналов фокусировки и трекинга осуществляются с использованием +/-опорного сигнала с выводов 17 и 18 АЦП U11, генерируемого из квадратурного суммарного сигнала. Квадратурный суммарный сигнал представляет собой сумму сигналов слежения. Нормировка сигналов ошибки выполняется с использованием +/- квадратурного сигнала в качестве опорного. Сигналы грубого позиционирования, квадратурный суммарный сигнал и чувствительный к входному воздействию сигнал преобразуются с использованием +/- опорного напряжения.
ЦАП U3 (фиг. 110В) формирует на своих выходах сигналы точного привода, грубого привода, фокусировки, LS и MS сигналы. Эти сигналы представляют собой сигналы слежения, обеспечивающие возбуждение усилителя мощности (U9 и U10 на фиг.111А-В и U8 на фиг.112В) и замыкание следящих цепей. При фокусировке используются сигналы FOCUSDRYLS и FOCUSDRYMS. Сигнал FOCUSDRYLS обеспечивает точное шаговое управление приводом фокусировки в режиме разомкнутой цепи для захвата диска путем перемещения очень малыми шагами. Сигнал FOCUSDRYMS используется как возбудитель следящей цепи. На вывод 7 ЦАП U3 (фиг.110D) поступает сигнал READ_LEVEL_MS. На вывод 9 ЦАП U3 поступает сигнал READ_LEVEL_ LS. Эти сигналы с выводов 7, 9 ЦАП U3 используются для управления мощности считывания лазера. На выводе 3 ЦАП U3 имеется пороговый сигнал смещения, используемый для восстановления ошибки канала считывания, обеспечивая ввод смещения в канал считывания для восстановления ошибки.
Заявленная система с оптическими дисками в основном содержит линзу и диск, подлежащий считыванию, и изобретение предусматривает также связанный с ней усовершенствованный способ захвата фокусировки, включающий этапы направления света на диск, подлежащий считыванию, первоначального перемещения линзы в нижнее положение ее рабочего хода, сканирования в верхнее положение рабочего хода линзы при поиске максимального квадратурного суммарного сигнала (вывод 25 схемы U11, фиг.110D), перемещения линзы от диска, контролирования полного количества света, приходящего от диска, определения в процессе контроля, когда полное количество света превысит половину измеренного максимального значения, поиска первого пересечения нуля, определения, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды и замыкания фокусировки в данный момент. В другом варианте данного способа, соответствующего изобретению, осуществляются операции направления света на считываемый диск, перемещения линзы в первое положение, контроля квадратурного суммарного сигнала, перемещения линзы из первого положения к диску при поиске максимального квадратурного суммарного сигнала, перемещения линзы от диска, контроля полного количества света, принятого от диска, определения в процессе контроля света, когда полное количество света превысит половину измеренного максимального значения, поиска первого пересечения нуля, определения, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды, и замыкания фокусировки, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды. В еще одном из вариантов осуществления способа падающий свет может быть сформирован лазером.
Усовершенствованная система захвата фокусировки, согласно изобретению, содержит средство для направления света на диск, подлежащий считыванию, средство для первоначального перемещения линзы в нижнее положение ее рабочего хода для последующего сканирования в верхнее положение рабочего хода линзы при поиске максимального квадратурного суммарного сигнала и затем для перемещения линзы от диска, средство для контроля полного количества света от диска и для определения в процессе контроля, когда полное количество света превысит половину измеренного максимального значения, средство для поиска первого пересечения нуля и средство для определения, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды, и замыкания фокусировки в этот момент.
В другом варианте система захвата фокусировки согласно изобретению содержит средство направления света на считываемый диск, средство для контроля квадратурного суммарного сигнала, средство для перемещения линзы в первое положение, для перемещения линзы из первого положения к диску при поиске максимального квадратурного суммарного сигнала и для перемещения линзы от диска, средство для контроля полного количества света, принятого от диска, средство для определения в процессе контроля света, когда полное количество света превысит половину максимального измеренного значения, средство поиска первого пересечения нуля, средство определения, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды, и средство для замыкания фокусировки, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды. В этом варианте средство для направления света на диск для считывания может включать в себя лазер.
В еще одном аспекте настоящее изобретение предусматривает цепь обратной связи, используемую в заявленной системе с оптическими дисками, содержащей механизм фокусировки и механизм трекинга, линзу и диск, подлежащий считыванию, причем упомянутые механизмы управляются с помощью цепи обратной связи. Один из вариантов этой цепи обратной связи содержит электронную схему для формирования сигнала слежения для осуществления коррекции механизма фокусировки и механизма трекинга, средство для направления света на считываемый диск, средство для первоначального перемещения линзы в нижнее положение ее рабочего хода, для последующего сканирования в верхнее положение рабочего хода линзы при поиске максимального квадратурного суммарного сигнала и затем перемещения линзы от диска, средство для контроля полного количества света, возвращающегося от диска, и для определения в процессе контроля, когда полное количество света превысит половину измеренного максимального значения, средство для поиска первого пересечения нуля и средство для определения, когда квадратурный суммарный сигнал превысит половину максимальной амплитуды, и замыкания фокусировки в данный момент, благодаря чему обеспечивается повышение эффективности захвата фокусировки.
На фиг.110D также показано опорное напряжение 2,5 В U24, которое усиливается с коэффициентом 2 в усилителе U23D, обеспечивая формирование опорного напряжения 5В. Опорное напряжение 2,5 В U24 использовано в компараторе U29, который сравнивает переменную составляющую сигнала ошибки трекинга с нулевым уровнем для определения пересечений нуля сигнала трекинга. Сигнал ошибки трекинга преобразуется в цифровую форму и подается в схему GLENDEC U100, показанную на фиг.115А-С, для определения пересечений дорожек, что используется в операциях поиска.
АЦП U11 (фиг. 110С-D) использует квадратурный суммарный сигнал для выполнения преобразований ошибок фокусировки и трекинга. С использованием квадратурного суммарного сигнала в качестве опоры на выводах 17 и 18 АЦП U11 сигналы ошибок автоматически нормируются по отношению к квадратурному суммарному сигналу. АЦП U11 делит ошибку на суммарный сигнал и формирует нормированный сигнал ошибки для ввода его в следящую цепь. Преимуществом такого решения является то, что следящая цепь при этом должна отрабатывать меньше изменений. Такая функция нормировки может быть выполнена внешними средствами с помощью аналоговых делителей. Однако им свойственны проблемы точности и быстродействия. Эта функция также может быть выполнена с помощью контроллера слежения ЦПС U4 (фиг.110А-В) путем цифрового деления сигнала ошибки на квадратурный суммарный сигнал. Деление в следящем контроллере U4 ЦПС требует существенного интервала времени. При частоте дискретизации 50 кГц может не оказаться достаточного времени на деление и обработку сигналов ошибок в цифровом виде в пределах следящих цепей. Поскольку квадратурный суммарный сигнал используется в качестве опорного, деление не является необходимым и сигналы ошибок автоматически нормируются.
Согласно фиг.110 и 113 опорные сигналы для АЦП на выводах 17, 18 АЦП U11 получают от операционных усилителей U17A, U17B (фиг.113). Операционные усилители U17A, U17B формируют опорные +/-напряжения. Переключатели U27A, U27B выбирают входной опорный сигнал для операционных усилителей U17A, U17B. Эти усилители обеспечивают генерирование опорного напряжения 1 В и опорное напряжение 4 В (2,5 В +/-1,5 В) при срабатывании переключателя U27B или опорный сигнал из квадратурного суммарного сигнала, когда срабатывает переключатель U27A. Переключатели U27A, U27B переключаются с частотой дискретизации следящей цепи 50 кГц. Это обеспечивает формирование выборок сигналов фокусировки и трекинга для квадратурного суммарного сигнала при каждой выборке следящей цепи, при этом квадратурный суммарный сигнал, сигнал, чувствительный к входному воздействию, и сигнал грубого позиционирования будут определяться при опорном напряжении 2,5 В +/-1,5 В. Путем мультиплексирования опорного сигнала автоматическая нормировка сигналов ошибок слежения обеспечивается одновременно с аналого-цифровым преобразованием.
Таким образом, система переключения, показанная на фиг.113, обеспечивает мультиплексирование двух разных опорных уровней. Система переключения позволяет выполнить аналого-цифровое преобразование с истинным опорным уровнем, соответствующим лазерной мощности и величине продетектированного сигнала от диска, а также осуществить нормировку сигналов ошибки слежения с использованием квадратурного суммарного опорного сигнала. Преобразование может быть произведено в реальном времени для таких сигналов, как мощность лазера, уровень квадратурного суммарного сигнала, сигналы ошибок фокусировки и трекинга, путем переключения опорных уровней с частотой 50 кГц.
На фиг.111 представлена схема, содержащая усилитель мощности фокусировки U9 (фиг.111А) и усилители мощности точного привода U10 (фиг.11В). Усилители мощности U9, U10 имеют цифровые входы разрешения на выводе 10, управляемые процессором. Преимущество микропроцессорного управления состоит в том, что усилители мощности находятся в неактивном состоянии при включении питания дисковода, что исключает повреждения и неконтролируемые перемещения соответствующих блоков фокусировки и привода. Усилители мощности U9, U10 используют опорный сигнал 2,5 В и запитываются от источника напряжением 5В. Усилители мощности U9, U10 имеют цифро-аналоговые входы от контроллера U4 ЦПС для управления выходным током. Усилитель мощности фокусировки может вырабатывать ток +/-250 мА, а усилитель мощности точного привода может вырабатывать ток +/-200 мА.
На фиг. 112 представлена схема, содержащая усилители мощности U30 (фиг. 112А) и U8 (фиг. 112В) для возбуждения привода катушки смещения и грубого привода. Усилители мощности U30, U8 запитываются от источника напряжением 12 В, обеспечивая использование более высокого диапазона напряжений на приводах. Катушка смещения (не показана) управляется цифровым разрешающим сигналом для установки полярности стирания или полярности записи. Усилитель мощности U30 формирует ток 1/3 А в катушке 20 Ом. Усилитель мощности U8 грубого привода формирует ток 0,45 А в нагрузке 1365 Ом. Усилитель мощности U8 имеет преобразователь уровня U23F на входе, обеспечивающий опорное напряжение 5 В вместо 2,5 В.
Усилители мощности U9, U10, U30, U8 по фиг.111 и 112 выполнены аналогичным образом и скомпенсированы для обеспечения полосы не более 30 кГц. Диоды-ограничители CR1, CR2, CR4, CR5 (фиг.112В) в усилителе мощности U8 поддерживают напряжение на выходе усилителя мощности U8 в заданных пределах при реверсировании направления грубого привода. Эти диоды препятствуют переходу усилителя U8 в насыщение в течение продолжительного интервала времени, что затруднило бы проведение поиска.
Выходной сигнал усилителя U26F (фиг.112А) и резисторный делитель R28/R30 обеспечивают подачу тока смещения в АЦП U6 (фиг.114А). Это обеспечивает процессору U38 возможность гарантировать, что катушка смещения находится на требуемом уровне, прежде чем осуществлять запись.
Как показано на фиг.113, преобразователь квадратурного суммарного сигнала реализован на схемах U27A, U27B, U17A, U17B, как обсуждалось выше со ссылками на фиг. 110. Соединитель J2 привода шпинделя передает сигналы на другие элементы схемы.
Дифференциальный усилитель U23C переносит ошибку грубого позиционирования на опорное напряжение 2,5 В. Ошибка грубого позиционирования с платы (J2) привода шпинделя обрабатывается относительно опорного сигнала Vcc. Транзистор Q14 представляет собой возбудитель для светодиода LED1 передней панели.
Согласно фиг. 114 U6 представляет собой последовательный АЦП, преобразующий сигнал с датчика температуры U20. Повторная калибровка дисковода производится при изменениях температуры. Это представляет важную особенность изобретения, особенно для записи на носителях типа 4х, для которых мощность записи является критичным фактором и может потребовать изменения в функции температуры системы.
Сигналы на выводах 2 (PWCAL) и 6 АЦП U6 представляют собой следящие сигналы с дифференциального усилителя, поступающие с 64910 (фиг.117). Эти сигналы могут использоваться для дискретизации сигналов канала считывания и управляются цифровыми сигналами на выводах 27-30 с 84910 (фиг.117В). В данном варианте выполнения выводы 27-30 заземлены, но специалисту следует иметь в виду, что эти выводы могут возбуждаться и другими сигналами и могут обеспечить выборки различных сигналов для их калибровки.
На выводе 3 U6 (фиг.114А) формируется уровень АРУ, который буферизуется посредством U21B и затем делится соответствующими резистивными делителями до уровня, требуемого для ввода в АЦП. Выборка уровня АРУ будет осуществляться в известном секторе записи. Полученное значение будет записываться с вывода 19 U16 в качестве фиксированного уровня АРУ, который затем вводится в 84910 (фиг. 117), где уровень АРУ устанавливается так, чтобы препятствовать работе усилителей при максимальном усилении, когда сектор оценивается для определения, не является ли он незаполненным.
Заявленная система дисковода на оптических дисках включает комбинацию носителя в форме диска, имеющего множество секторов данных, усилительного средства для оценивания конкретного сектора для определения того, не является ли сектор незаполненным, и средства, препятствующего работе усилительного средства при максимальном усилении при оценивании сектора. В конкретном варианте выполнения средство, препятствующее работе усилительного средства при максимальном усилении, представляет собой микропроцессор U38 (фиг.109А и В), предназначенный для установки уровня усиления усилительного средства.
Как описано ниже, заявленная оптическая система, содержащая механизм фокусировки и механизм трекинга, линзу и считываемый диск, характеризуется тем, что механизмы управляются цепью обратной связи, содержащей электронную схему для формирования сигналов слежения для осуществления коррекции механизма фокусировки и механизма трекинга, усилительное средство для оценивания конкретного сектора диска для определения того, не является ли он незаполненным, и средство, предотвращающее работу усилительного средства при максимальном усилении в процессе оценивания сектора. В другом варианте средство, предотвращающее работу усилительного средства при максимальном усилении, включает в себя микропроцессор, U38 по фиг.109А и В, предназначенный для установки уровня усиления усилительного средства.
Ток смещения, упоминавшийся со ссылками на фиг.112, контролируется на выводе 4 АЦП U6 по фиг.114А для обеспечения надежного контроля операций записи и стирания, для определения корректной амплитуды и полярности.
Сигналы PWCALLF, PWCALHF формируются на выводах 7 и 8 U6 при А6 и А7 соответственно. Эти сигналы получают со схемы выборки и хранения (фиг.118), и их можно проконтролировать посредством кодера/декодера связующих логических схем (GLENDEC), с помощью сигналов WTLF или WTHF, как показано на фиг. 118В. Они используются в пределах сектора для того, чтобы осуществить выборку высокочастотной комбинации записи и усредненной постоянной составляющей низкочастотной комбинации записи. Средние значения могут сравниваться для получения смещения, которое может быть использовано для оптимизации мощности записи для носителей типа 4х.
Вывод 11 U6 (А9) на фиг.114А связан через U21A с дифференциальным усилителем, имеющим входы INTD+ и INTD-. Эти сигналы представляют собой уровень постоянной составляющей данных относительно уровня постоянной составляющей сигнала восстановления в сигнале считывания 4х. Разностный сигнал определяет пороговый уровень для компаратора в сигнале считывания 4х. Используя ЦАП, порог ЦПС на U3, вывод 3 (фиг.110D), это смещение постоянной составляющей можно скомпенсировать. Дополнительно для восстановления ошибки смещение должно быть введено при попытках восстановления данных, которые в противном случае могут оказаться невосстанавливаемыми. Таким образом обеспечивается функция восстановления канала считывания 4х и калибровки.
Сигнал ReadDIFF на выводе 12 U6, А1, формируется как выходной сигнал дифференциального усилителя U15B (фиг. 114А-В). Этот сигнал представляет собой постоянную составляющую магнитооптического предварительного усилителя или предварительного усилителя преформатирования. Таким образом может быть определено значение постоянной составляющей сигнала считывания и может быть использовано для измерения значения постоянной составляющей стертой дорожки в первом направлении и стертой дорожки во втором направлении, для того чтобы получить разностное значение для магнитооптического сигнала, определяемого как размах между пиковыми значениями. Также данные записи могут быть усреднены для получения среднего значения постоянной составляющей, которая обеспечивает количественную оценку осуществляемой записи. Это значение также используется для калибровки мощности записи для режима 4х.
U16 на фиг.114В представляет собой ЦАП, который управляется от процессора 80С188 (фиг.109А, U38). Выходные сигналы U16 представляют собой напряжения, которые управляют уровнями тока для трех уровней мощности записи: WR1-V, WR2-V, WR3-V. Эти сигналы определяют мощность отдельных импульсов. Четвертый выходной сигнал представляет собой упомянутый выше фиксированный уровень АРУ.
Схема GLENDEC U100 показана на фиг.115. Она выполняет различные функции с помощью вентильной матрицы, например функцию кодирования/декодирования в RLL 1,7-коде. Входом для функции кодирования является NRZ с U43 (фиг.108А) на выводе 70, а ее выходом - RLL 1,7-код, записываемый на диск с помощью выводов 36, 37, 38 U100 (WR1, WR2, WR3). Функция декодирования получает данные, кодированные в RLL-коде, с диска, которые декодируются и возвращаются в NRZ для передачи к U43 (фиг.108А). U16 (фиг.114В) также использует 4х формат сектора, который используется для задания временных характеристик. Разумеется, U16 может программироваться, так что на нем могут быть определены различные форматы.
Другие функции схемы GLENDEC U100 (фиг.115) включают коммуникационный интерфейс между ЦПС (U4 на фиг.110) и главным компьютером, 80С188 (U38, фиг. 109). Предусмотрены счетчики для пересечений дорожек, таймеры для измерения времени между пересечениями дорожек, которые используются ЦПС для функций поиска.
На фиг. 116 представлены схемы формирования ошибок слежения. Сигналы QUADA, QUADB, QUADC, QADDD (фиг.116А) представляют собой выходные сигналы следящих усилителей с импедансной связью, которые находятся на плате предварительных усилителей (фиг.102В, UF-U1D). Эти сигналы суммируются и вычитаются в операционных усилителях U22A, U22B (фиг.116А-В) для формирования затем сигналов ошибок трекинга и фокусировки ТЕ и FE соответственно на J4 (фиг. 116А). U22C (фиг.116В) суммирует сигналы QUADA, QUADB, QUADC, QADD для формирования квадратурного суммарного сигнала QS.
Переключатели U28A, U28B, U28C, U28D, U27C, U27D задействованы при записи для понижения усиления схем ввиду увеличения квадратурных токов при записи. При записи все сигналы QUADA, QUADB, QUADC, QUADD ослаблены примерно в 4 раза.
Канал считывания описывается со ссылками на фиг.118А. Сигналы считывания RFD+, RFD- формируются на плате предусилителей (фиг.102В, U106) и проходят через переключатели усиления U48A, U48B (фиг.118А (1)) для нормирования относительных уровней переформатированного сигнала и магнитооптического сигнала. Переключатели усиления управляются посредством U25B, переключающим их соответственно в положения, соответствующие предварительно форматированным и магнитооптическим областям на диске.
При операциях записи U48C и U48D открыты и сигналы считывания не насыщают входы канала считывания. При операциях считывания оба эти переключателя замкнуты и сигнал считывания проходит через дифференциатор U47 (фиг. 118А(2)), который скомпенсирован для ошибок групповой задержки и может работать при частоте до 20 МГц. Выходной сигнал U47 развязан по переменному току посредством С36 и С37 относительно SSI фильтра U1 и 84910 через FRONTOUT+ и FRONTOUT-. Сигналы соответственно ослабляются посредством R75 и R48, как показано на фиг.117С, так что допустимые уровни сигналов поступают на 84910 через С34 и С33 соответственно.
В 84910 включены различные функции, обеспечивающие надлежащее функционирование канала считывания. К ним относятся АРУ канала считывания, фазовая автоподстройка частоты канала считывания, детектирование данных, разделение данных, синтезирование частот. Формирователи ошибок слежения, являющиеся типовыми функциональными преобразователями типа Winchester ошибок слежения, также входят в 84910. Они, однако, не используются в настоящем изобретении.
Выходной сигнал разделенных данных с 84910 (U13 на фиг.117) поступает на выводы 14 и 15 и затем подается на SN330 (U43 на фиг.108А). Эти сигналы используются в режимах 1х и 2х канала считывания.
Сигналы преформатирования формируются на выводе 31 84910, так что имеются два отдельных сигнала АРУ. Один используется для считывания заголовка данных предварительного форматирования, а другой - для считывания магнитооптических данных.
В случае канала считывания типа 4х сигналы SSIFR, SSIFN (фиг.118А(2)) поступают на буферный усилитель (U49, фиг.119А). Выходной сигнал с U49 поступает на Q3, Q4, Q5 (фиг.119А-В), которые действуют как интегратор с усилением. U5 по фиг.119В представляет собой усилитель для проинтегрированного и усиленного сигнала. Канал считывания 4х, таким образом, использует SSI фильтр, частотную коррекцию, дифференцирование и интегрирование.
Выходной сигнал U5 буферизуется с помощью усилителя U12 (фиг.119А) и подается на схему, которая определяет среднюю точку между уровнями от пика к пику, называемую также схемой восстановления. В результате восстановления сигналы INTD+ и INTD- (фиг.118С) поступают на вход компаратора, выходной сигнал которого обеспечивает пороговый сигнал для разделения данных. Сигналы INT+, INT-, INTD+, INTD - затем подаются на U14 (MRC1, фиг.118С), где они сравниваются, и производится разделение данных. Выходной сигнал U14 подается на схему GLENDEC U100 (фиг.115) для операций кодирования/декодирования.
Программное обеспечение Цифрового Процессора Сигналов раскрыто в прилагаемом к настоящему описанию Приложении В.
Цифровая схема и компенсации опережения/запаздывания
В технике хорошо известны системы управления позиционированием, которые используют привод, сигнал управления которым пропорционален ускорению. Эти системы управления позиционированием требуют использования компенсации опережения/запаздывания для существенного исключения колебаний и стабилизации системы управления позиционированием или следящей системы.
Схема, соответствующая настоящему изобретению, представляет собой цифровую схему компенсации опережения/запаздывания, которая не только существенно подавляет колебания, но и предусматривает использование режекторного фильтра с частотой режекции, равной половине частоты цифровой дискретизации. В следующем разделе, озаглавленном Передаточные Функции, представлены математические передаточные функции для цифровой схемы компенсации опережения/запаздывания, соответствующей изобретению, обеспечивающей компенсацию одиночного опережения и комплексного запаздывания. Также упомянуты для сравнения некоторые известные цифровые схемы компенсации опережения/запаздывания и аналоговая схема компенсации опережения/запаздывания. Как представлено ниже, передаточная функция системы, соответствующей изобретению, имеет вид: H(s)= (s+w6)x квадрат(w7)делен. на (квадрат(s)+2 zeta7 w7s+квадрат(w7))w6.
Также в последующем разделе приведена формулировка в s-области передаточной функции, пригодная для отображения в виде графика Боде. Из графика Боде можно видеть, что схема компенсации, соответствующая изобретению, имеет минимальное влияние на фазу.
В то время как из уровня техники известны схемы компенсации, оказывающие минимальное влияние на фазу, только в настоящем изобретении в схеме компенсации использован режекторный фильтр на частоте, равной половине частоты цифровой дискретизации. При надлежащем выборе частоты дискретизации этот режекторный фильтр может быть использован для режекции частот паразитного механического резонанса, например, таких как компенсируемые частоты следящего привода. В дисководе 10 по фиг.1 используется схема компенсации одиночного опережения и комплексного запаздывания для подавления резонанса механической развязки точного следящего привода и следящего привода фокусировки, как показано ниже.
Передаточные функции
Приведенные ниже математические выкладки иллюстрируют передаточные функции цифровой схемы компенсации опережения/запаздывания, соответствующей настоящему изобретению. Вначале будет рассмотрена передаточная функция цепи фокусировки, после чего также детально будет представлено описание передаточных функций компенсации.
Передаточная функция цепи фокусировки:
Сдвиг по частоте при 23 С
Тfactor=1
ω0 = 2•π•3000i
Модель исполнительного механизма: Частота развязки:
ω1 = Tfactor•2•π•33•103
ζ1 = 0,01
Паразитный резонанс:
ω3 = Tfactor•2•π•23•103
ζ3 = 0,03
ω2 = Tfactor•2•π•27•103
Срыв по фазе на высокой частоте:
ω4 = 2•π•100•103

Основная частота:
Mconstant=790m/(s^2•A)
ω5 =Tfactor•2•π•36.9 ζ5 = 0.08
Отклик исполнительного механизма:
Hactuator(s)=H1(s)•(H2(s)•(H3(s)•(H4(s)
Модель ЦПС: Схема одиночного опережения/комплексного запаздывания:
Период дискретизации:
T=20•10-6
Задержка в ЦПС (выборка и хранение) и при обработке:
Отклик ЦПС:
Hdsp(s)=(ZOH(s)•(Hdelay(s)•(Hleadlag(s))
Фильтр противоналожения:
Rfilt=2000
Cfilt=100•10-12
τfilt = Rfilt•Cfilt
Ffilt = 7.958•104
Упрощенный отклик усилителя мощности цепи фокусировки:
ωpa1 = 2•π•28000
ζpa1 = .4
ωpa2 = 2•π•450000
ζpa2 = 0.8
Gpa=Gpa1•Gpa2A/BIT
Gpa=7.477•10-6
Сигнал ошибки фокусировки:


Hfe=3.277•109
Отклик фильтра:
H(s)=Hfilt(s) Volts/Volt Вольт/Вольт
Отклик ЦПС:
H(s)=Hdsp(s) Volts/Volt Вольт/Вольт
Отклик Усилителя Мощности:
H(s)=Hpa(s) Amps/bit Ампер/бит
Отклик исполнительного механизма:
H(s)=Hactuator(s) m/a м/а
Отклик сигнала ошибки фокусировки:
H(s)=Hfe bit/m бит/м
Отклик разомкнутой цепи:
H(s)=Hfilt(s)•Hdsp(s)•Hpa(s)•H'actuator(s)•Hfe
Коэффициент усиления:
G=36.059
Отклик замкнутой цепи:
Генерирование диаграммы Найквиста с "М-окружностями":
Выбранное количество максимумов Мр замкнутой цепи:
j=1...4
Радиус М-окружности:
Центр М-окружности:
n2=100
m=1...n2




n=300
k=1...n
Nk=1000+100•k
Данные для графика Боде:
min=100
max=10•104

Mang(s) = 20•log(|G•H(s)|)
φ(s) = angle(Re(H(s)),Im(H(s)))-360•deg
Magn1(s) = 20•log(|HCl(s)|)
φ1(s) = angle(Re(HCl(s)),Im(HCl(s)))-360•deg
Как показано на фиг.124, диаграмма Найквиста передаточной функции цепи фокусировки включает годографы равных максимумов, образующие М-окружности: 9-22, 9-24, 9-26, 9-28, имеющие значение Мр, равное соответственно 4,0; 2,0; 1,5; 1,3. На фиг.124 также показана кривая цепи 9-30, полученная из приведенных выше уравнений разомкнутой цепи. На фиг.125 показаны амплитудная характеристика отклика разомкнутой цепи 9-32 и амплитудная характеристика замкнутой цепи 9-34. На фиг. 126 показаны фазовая характеристика отклика разомкнутой цепи 9-36 и фазовая характеристика отклика замкнутой цепи 9-38.
Передаточные функции компенсации:
T=20•10-6
ω0 = 2•π•i•3000
Задержка в ЦПС (выборка и хранение) и при обработке:
Модель ЦПС: схема тройного опережения/запаздывания:
Двустороннее преобразование:




Определение Z
Z=es•T
Отклик тройного опережения/запаздывания:
Отклик одиночного опережения/запаздывания:


Комплексное опережение/запаздывание:
ωcenter = 2•π•2200
Span = 1.0
ω2 = ωcenter-0.5•Span•ωcenter
ζ3 = 1.7
ζ2 = 0.707



Компенсация аналогового блока:
Analog Box Compensation:
τlead = 20.5•103•0.01•10-6
τlp = 330•10-12•20.5•103
Одиночное опережение/комплексное запаздывание:
ω6 = 2•π•900
ω7 = 2•π•22000
ζ7 = 0.8


Данные графика:
n=400
k=1...n
min=100

max=10•104
Magn(s) = 20•log(|HTriple(s)|)
Magn1(s) = 20•log(|HSingle(s)|)
Magn2(s) = 20•log(|HComplex(s)|)
Magn3(s) = 20•log(|HAnalogBox(s)|)
Magn4(s) = 20•log(|Hslcl(s)|)
На фиг.127 показаны амплитудные характеристики отклика для передаточных функций компенсации фокусировки, полученные из приведенных уравнений. На графиках представлены отдельно характеристики отклика для тройного опережения запаздывания, одиночного опережения запаздывания, комплексного опережения запаздывания, аналогового блока и для одиночного опережения и комплексного запаздывания, как показано условными обозначениями на графике. Аналогично, на фиг.128 показаны фазовые характеристики отклика для передаточных функций компенсации фокусировки, полученные из соответствующих уравнений. На графике показаны отдельно фазовые характеристики отклика для тройного опережения запаздывания, одиночного опережения запаздывания, комплексного опережения запаздывания, аналогового блока и для одиночного опережения/комплексного запаздывания, как показано условными обозначениями.
Комплексное опережение/запаздывание:
N1=-0.554
N2=1
N3=-0.456
D1=1
D2=-0.916
D3=0.068
Одиночное опережение/комплексное запаздывание:
ω2•T2+2•T = 4.276•10-5
2•ω2•T2 = 5.529•10-6
N1=1
N2=0.107
N3=-0.893
|N1|+|N2|+|N3| = 2
D2=0.356
D3=0.136
Дополнительные сведения по рассматриваемому вопросу содержатся в патентах США N 5155633, 5245174, 5177640.
Хотя изобретение было детально описано со ссылками на предпочтительные варианты выполнения, следует иметь в виду, что изобретение не ограничено указанными вариантами. Напротив, имея в виду настоящее раскрытие, описывающее наилучшие режимы практического осуществления изобретения, специалисты могут внести различные модификации и изменения, не выходя за пределы объема и сущности изобретения. Объем изобретения определяется пунктами формулы изобретения, а не предшествующим описанием. Все изменения, модификации и варианты, совпадающие по смыслу или эквивалентные изложенному в пунктах формулы изобретения, должны рассматриваться как входящие в его объем. Тр
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОПТИЧЕСКОЙ ГОЛОВКИ ПРИ ПОИСКЕ ДОРОЖКИ НА НОСИТЕЛЕ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА (ВАРИАНТЫ) | 1996 |
|
RU2201624C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2188464C2 |
| ЛЕНТОКОПИРОВАЛЬНЫЙ АППАРАТ ДЛЯ ОПТИЧЕСКОЙ ЛЕНТЫ | 1995 |
|
RU2152635C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЕЛИЧИНЫ МАГНИТНОГО ПОЛЯ | 1996 |
|
RU2182721C2 |
| СПОСОБ ЗАПИСИ ДАННЫХ НА НОСИТЕЛЬ ЗАПИСИ | 2003 |
|
RU2303822C2 |
| НОСИТЕЛЬ ЗАПИСИ И СПОСОБ ЗАПИСИ НА НОСИТЕЛЬ ЗАПИСИ | 2003 |
|
RU2305330C2 |
| ОБЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ЗАГРУЗКИ ДЛЯ УПРАВЛЯЮЩЕЙ СЕРВИСНОЙ ПРОГРАММЫ, СПОСОБНОЙ К ИНИЦИАЛИЗАЦИИ ВО МНОЖЕСТВЕННЫХ АРХИТЕКТУРАХ | 2015 |
|
RU2665238C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДИСКОВОДОМ ПРИ ДУБЛИРОВАННОМ КОМПЬЮТЕРНОМ БЛОКЕ | 1996 |
|
RU2190873C2 |
| КОНФИГУРАЦИЯ АРХИТЕКТУРНОГО РЕЖИМА В ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЕ | 2015 |
|
RU2664413C2 |
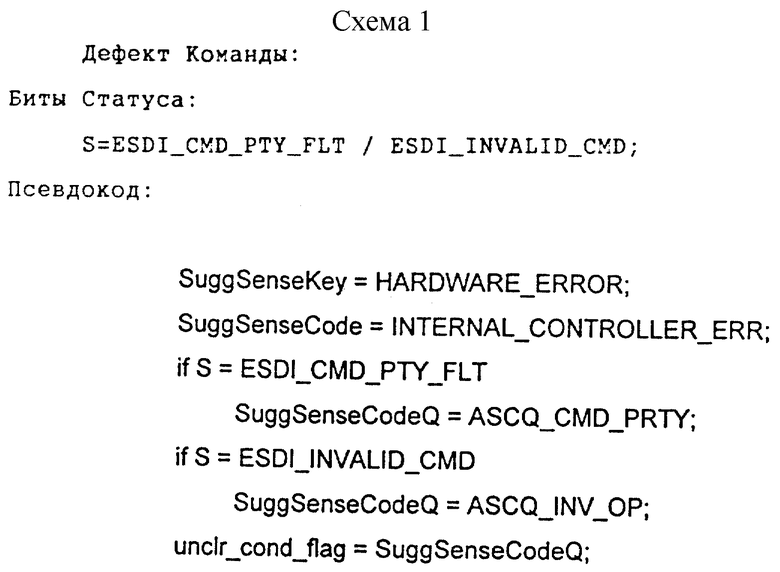
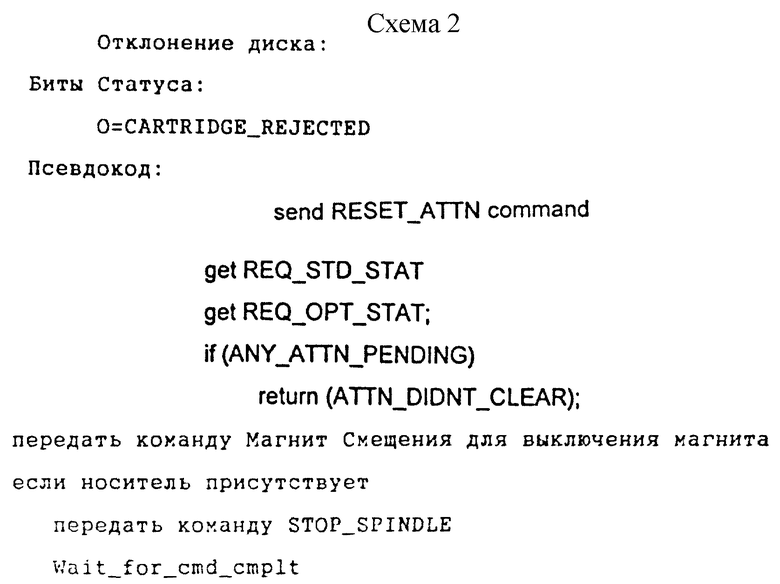
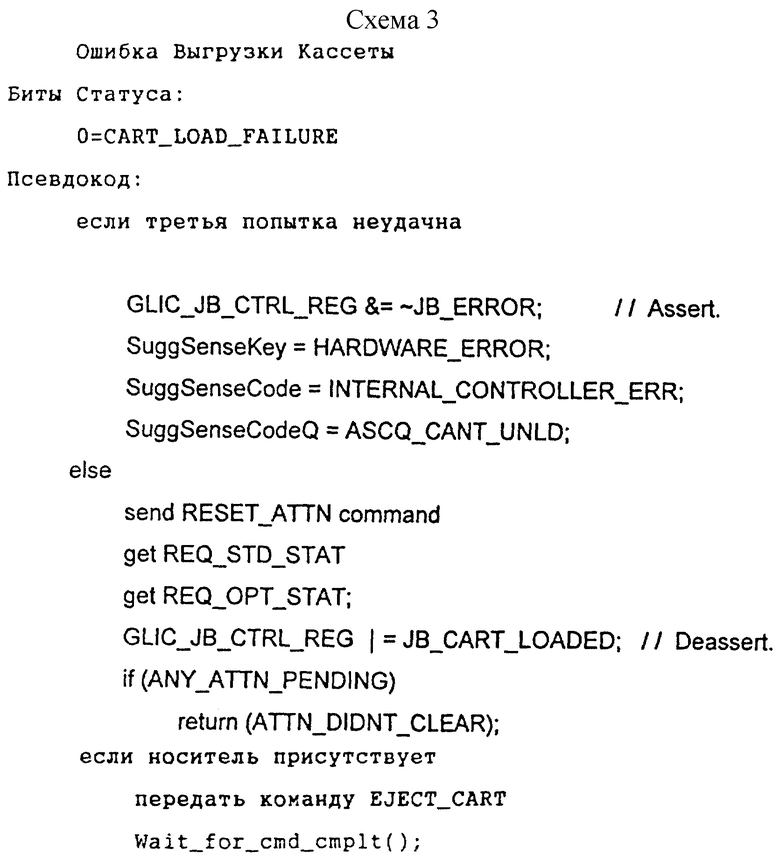
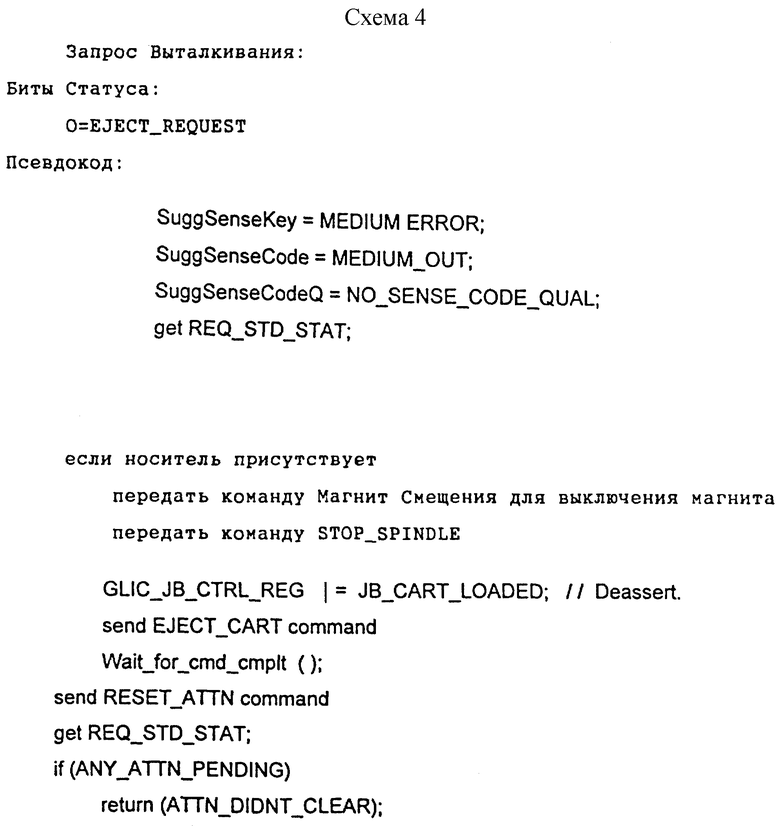
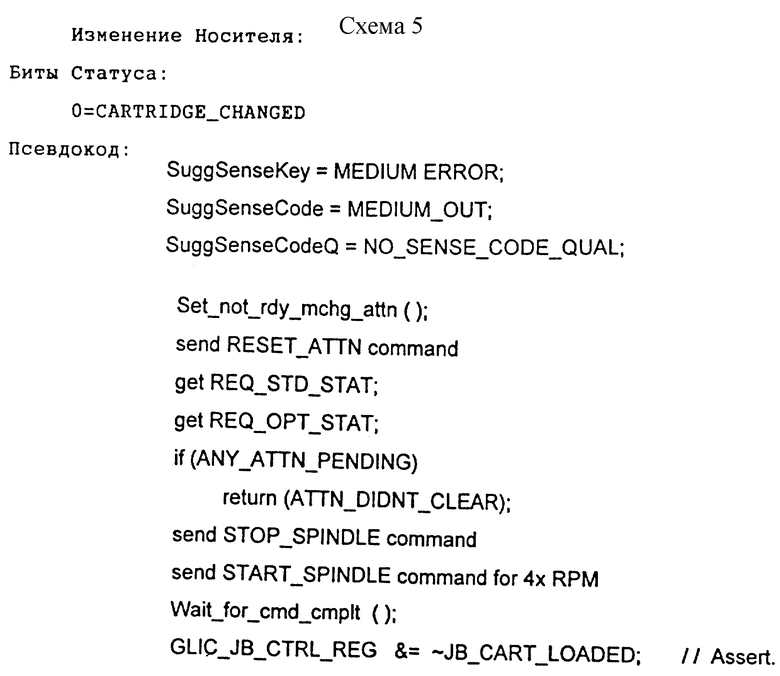


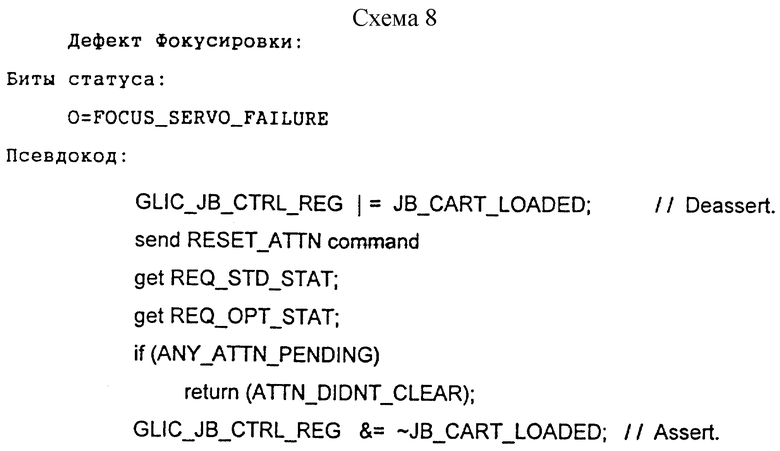

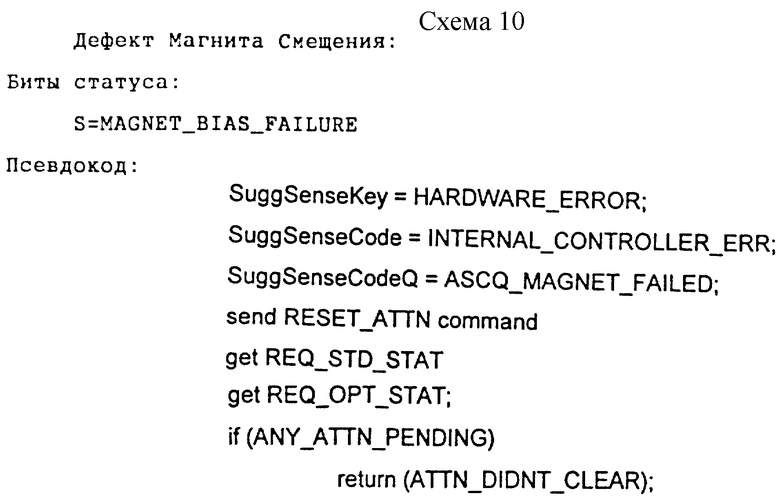

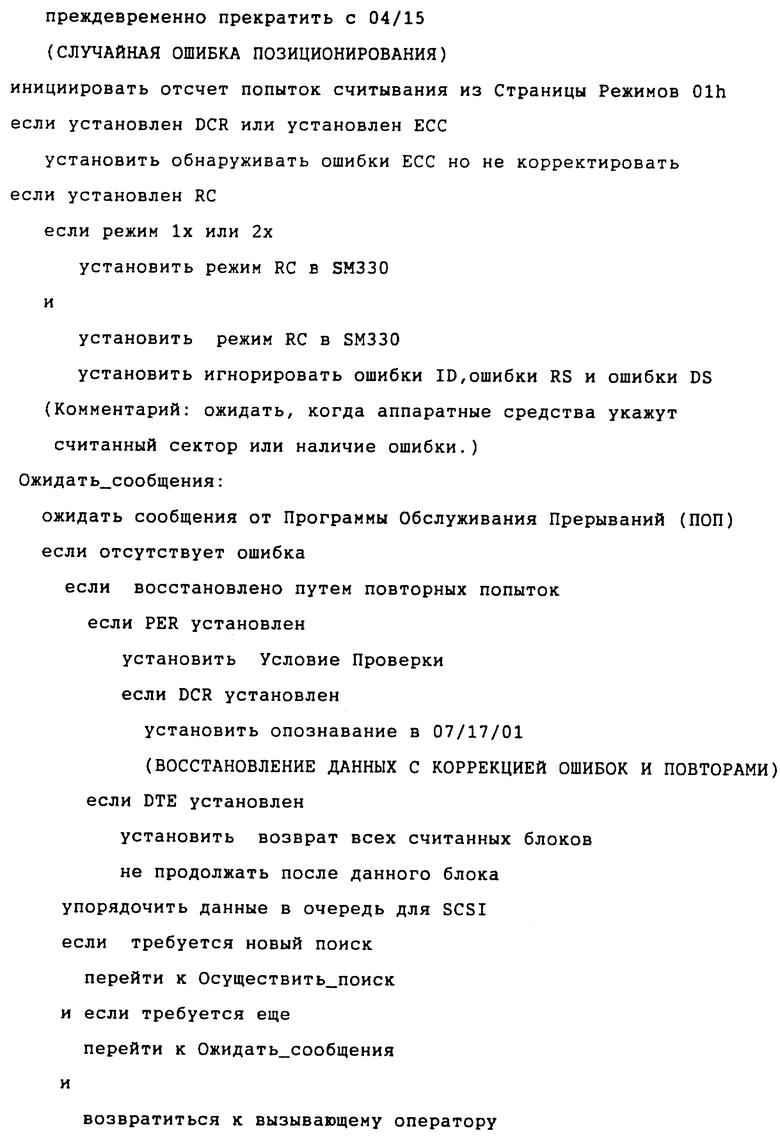


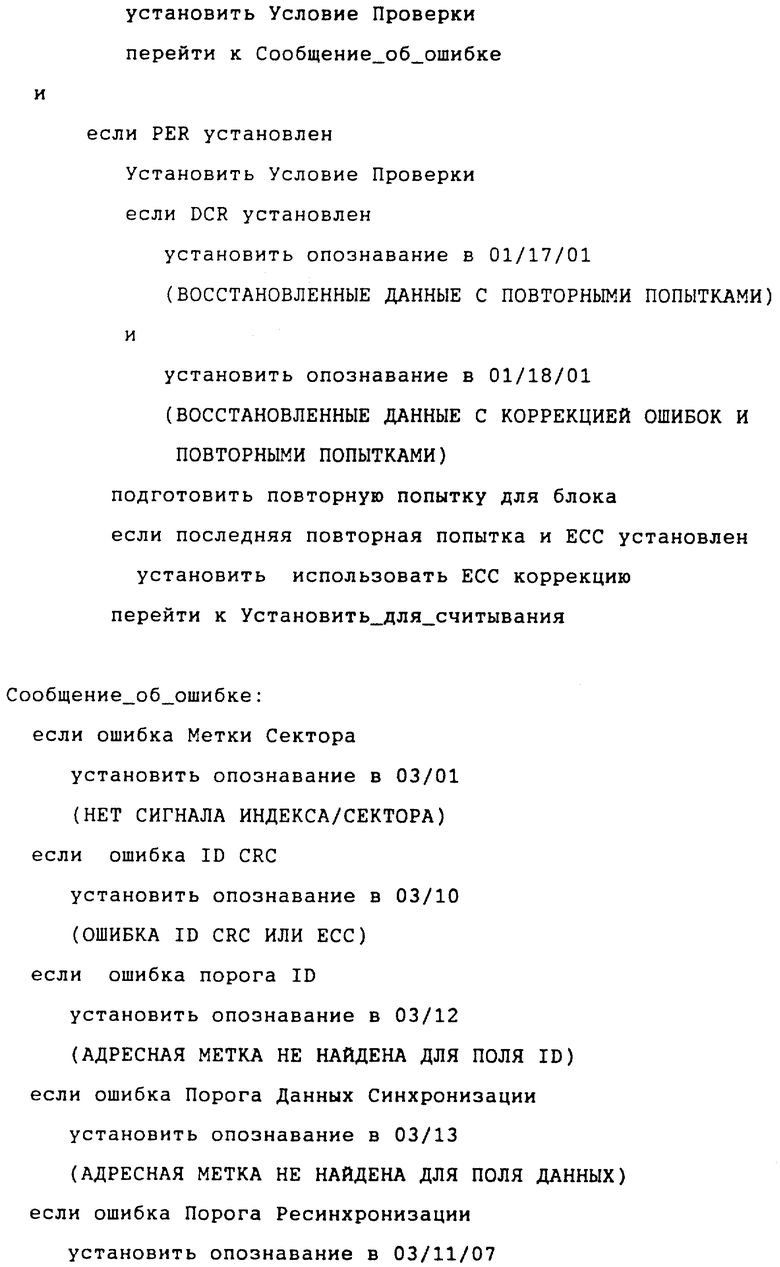

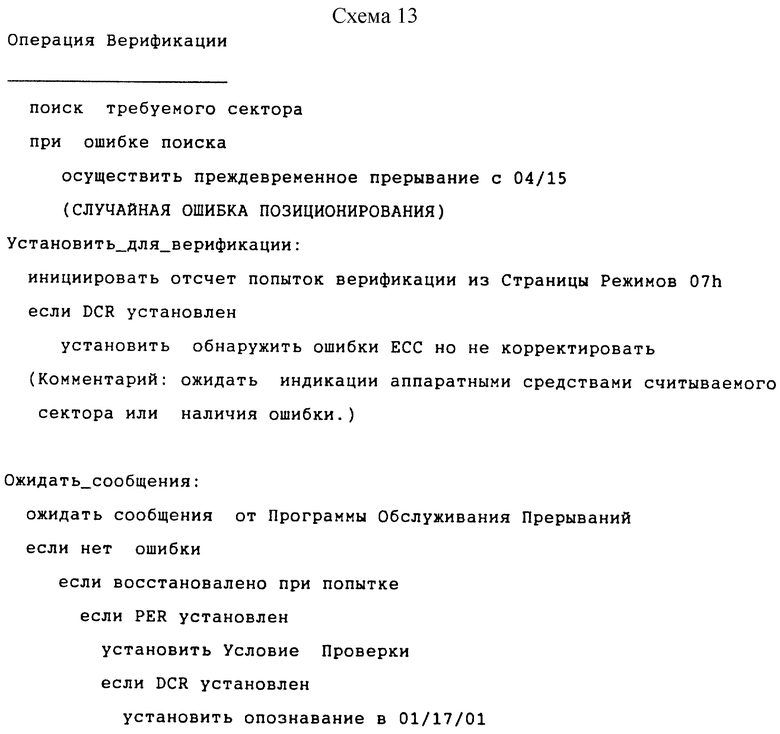
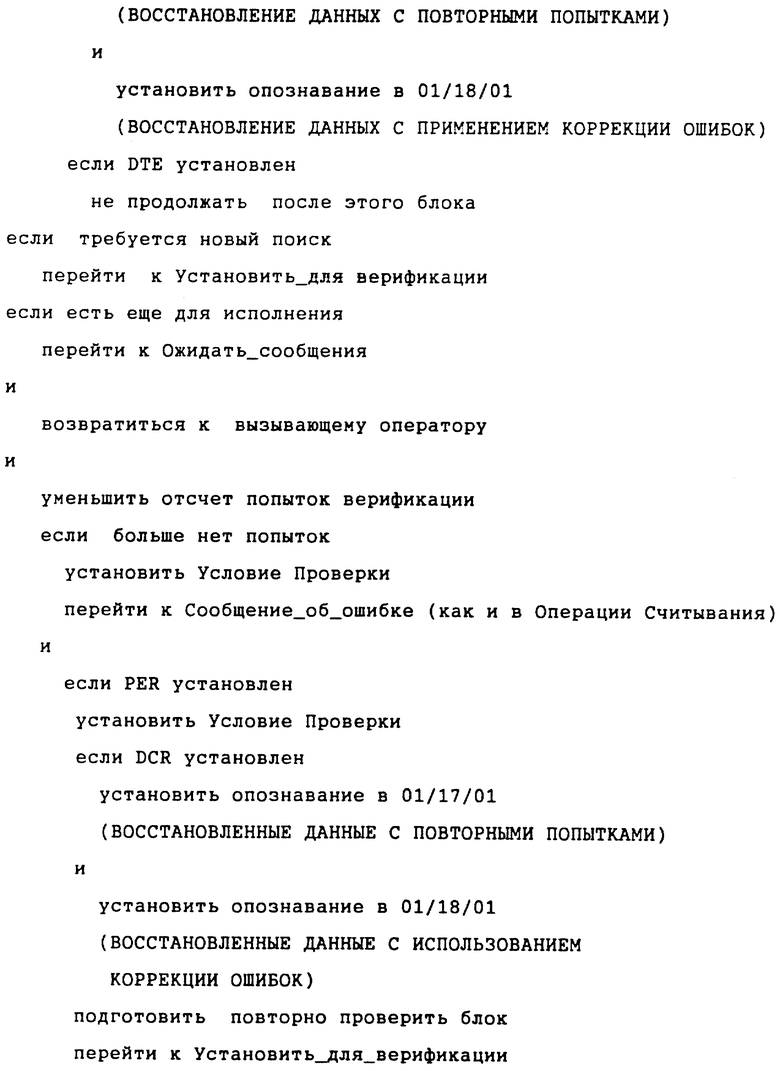
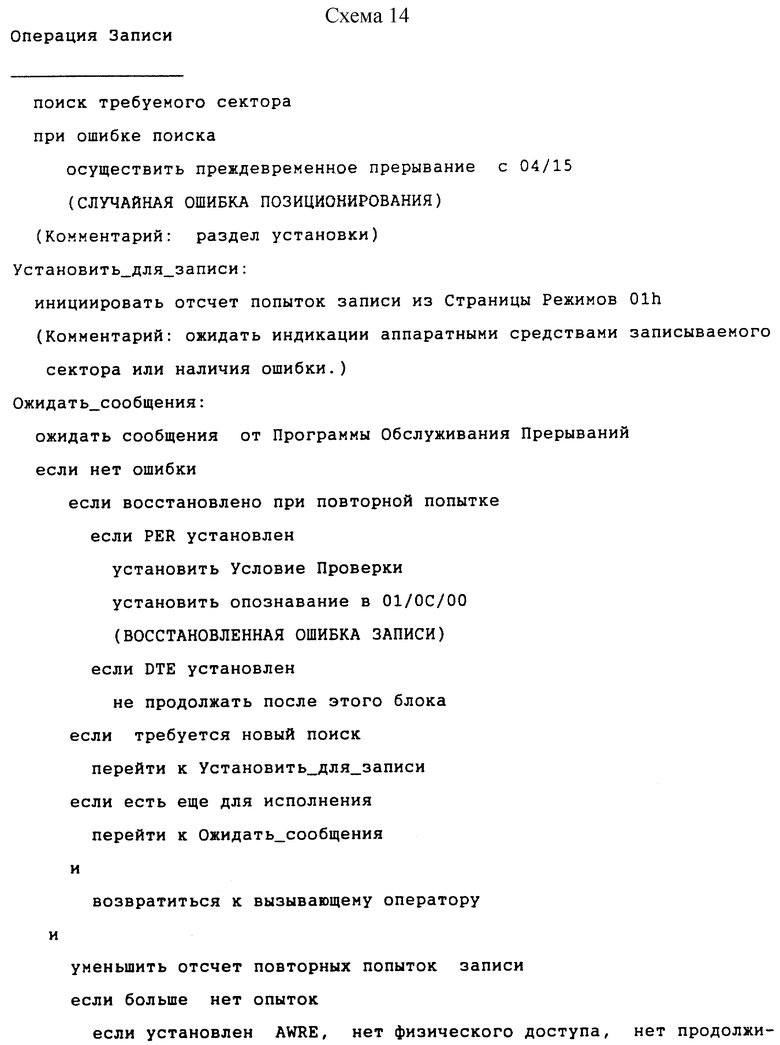
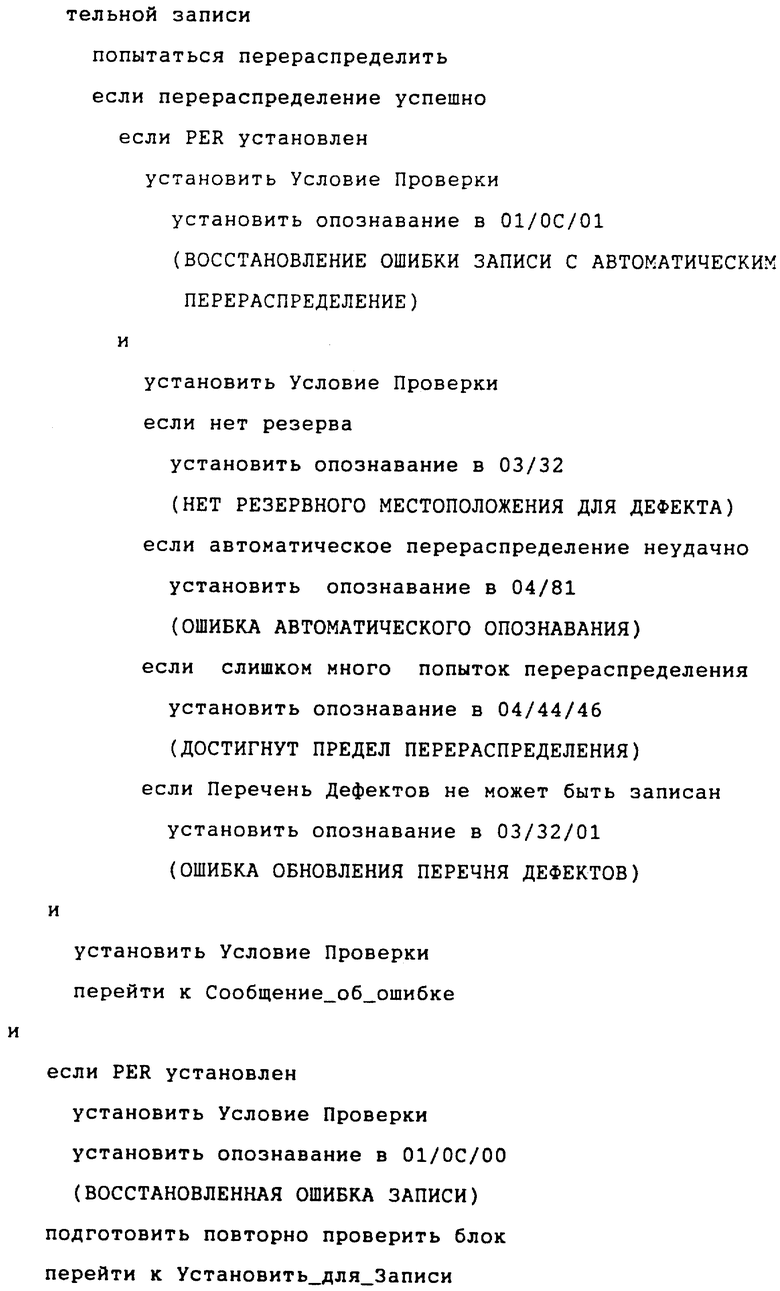
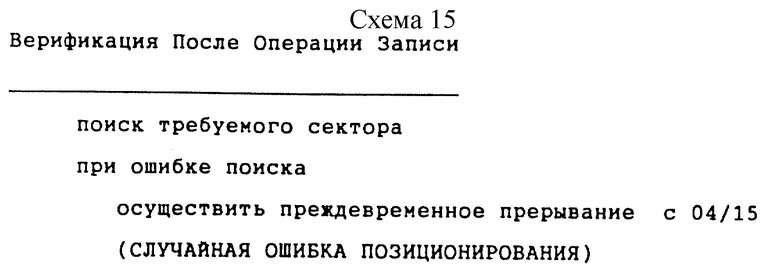
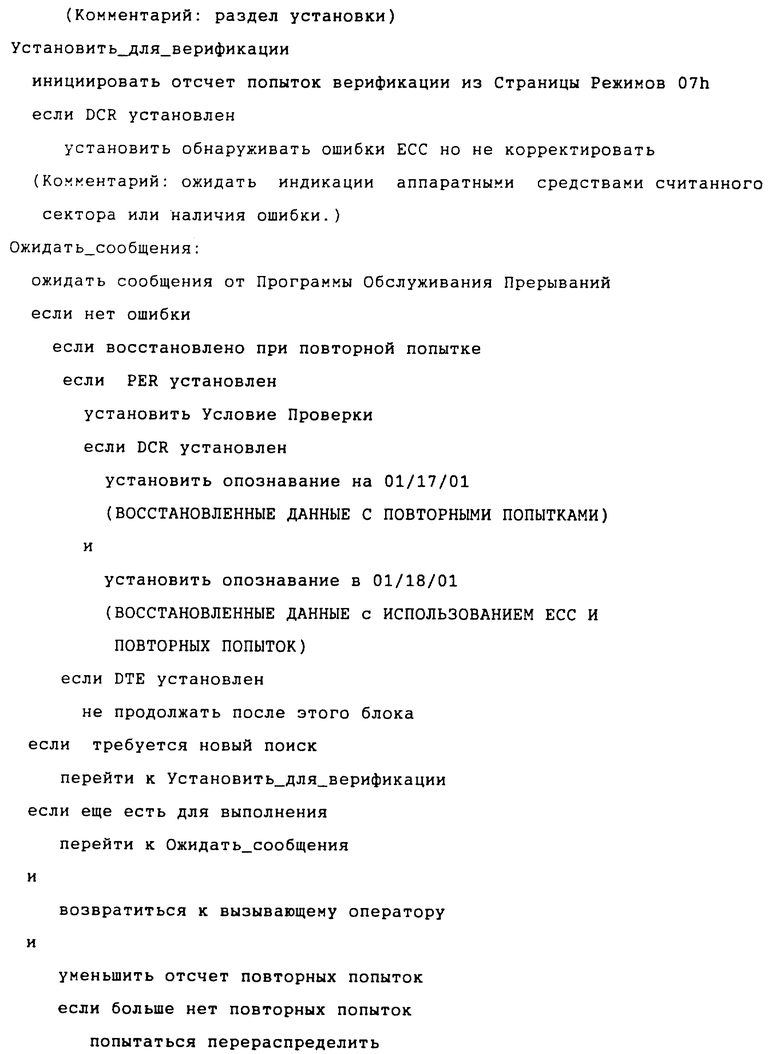
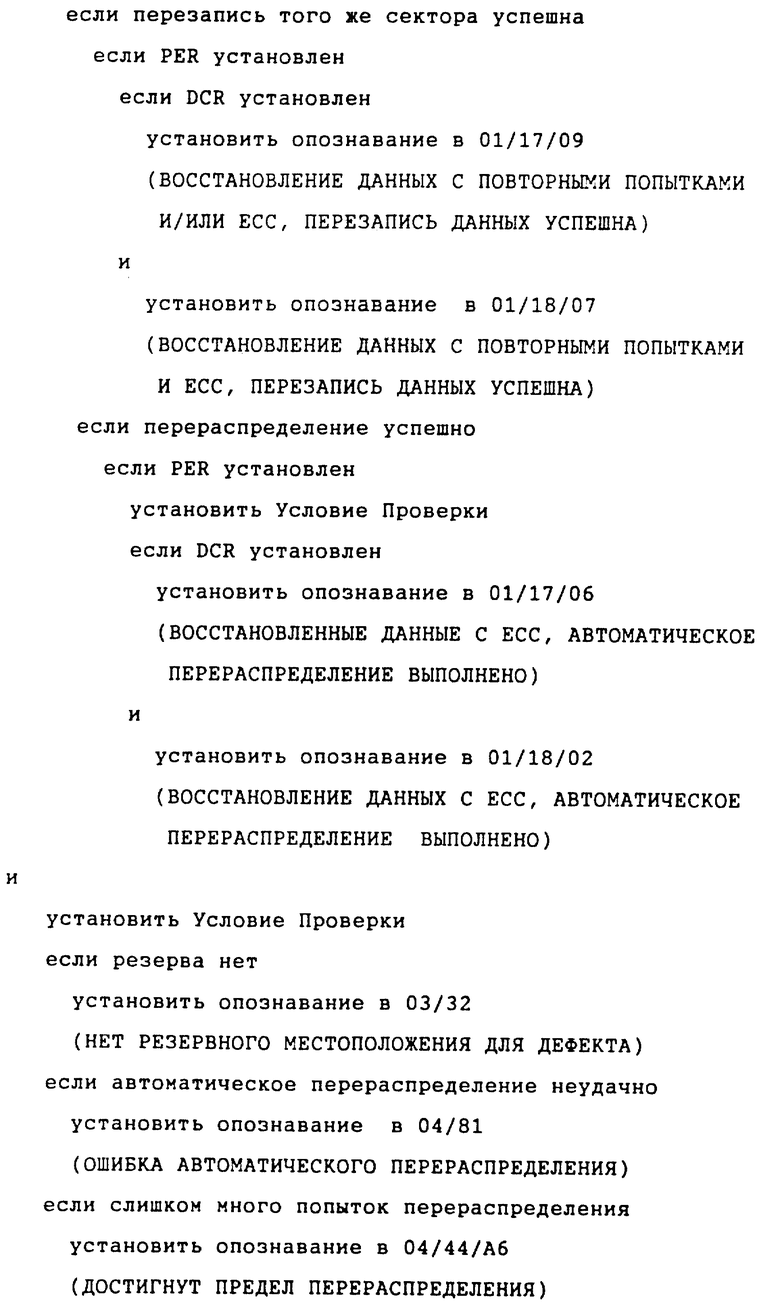
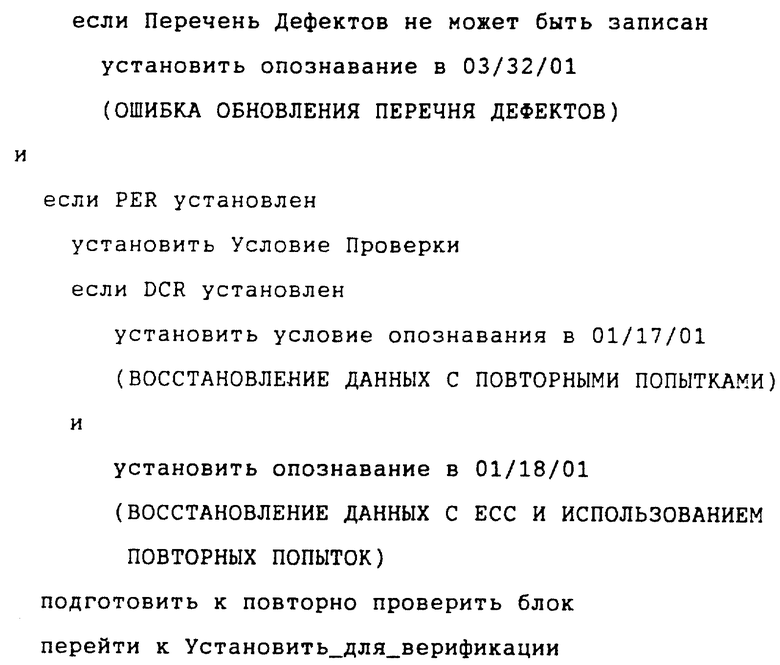
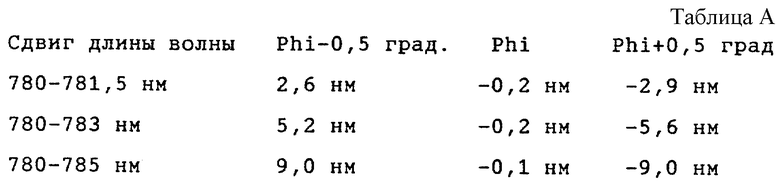
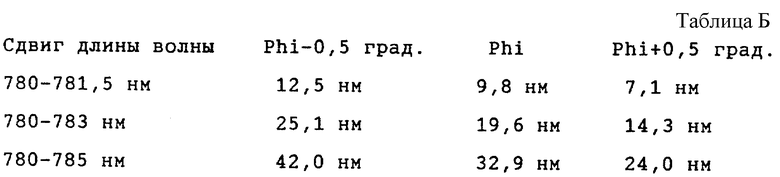
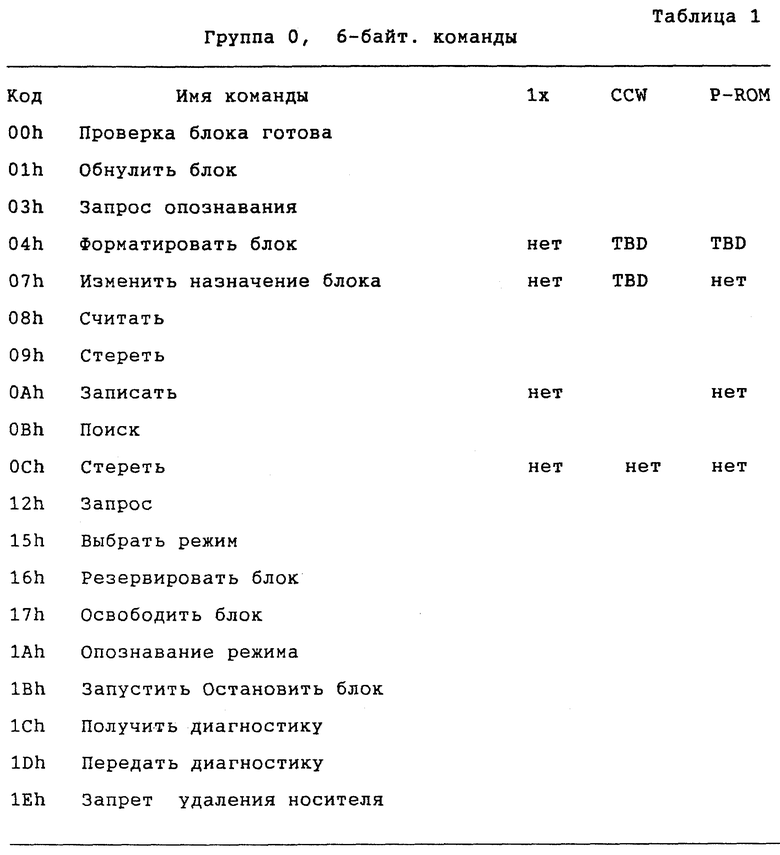
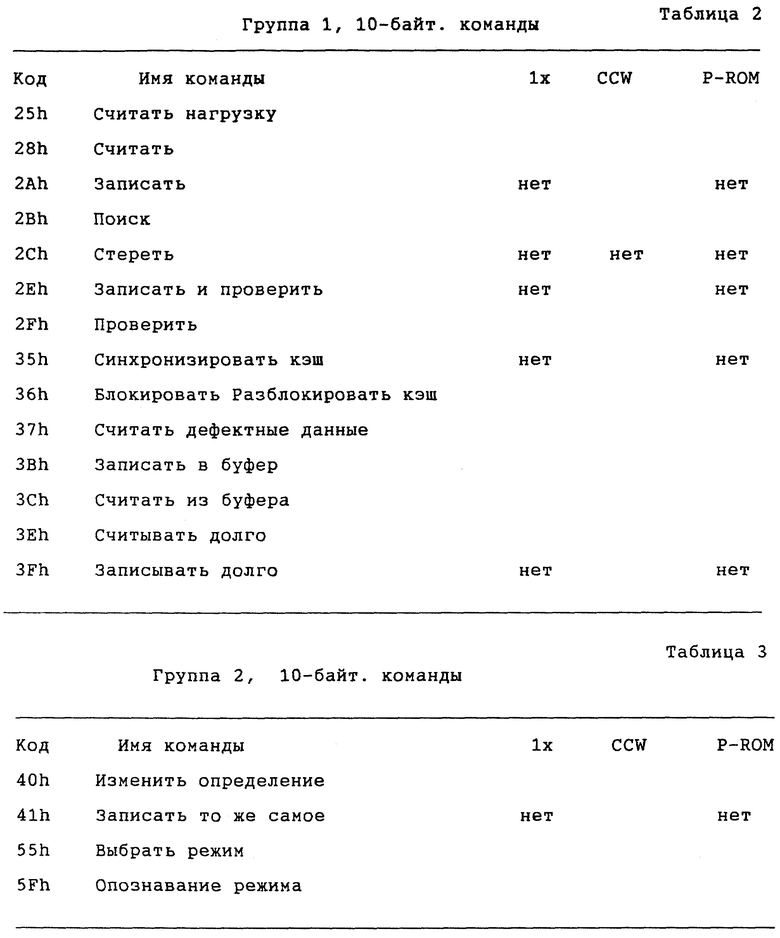
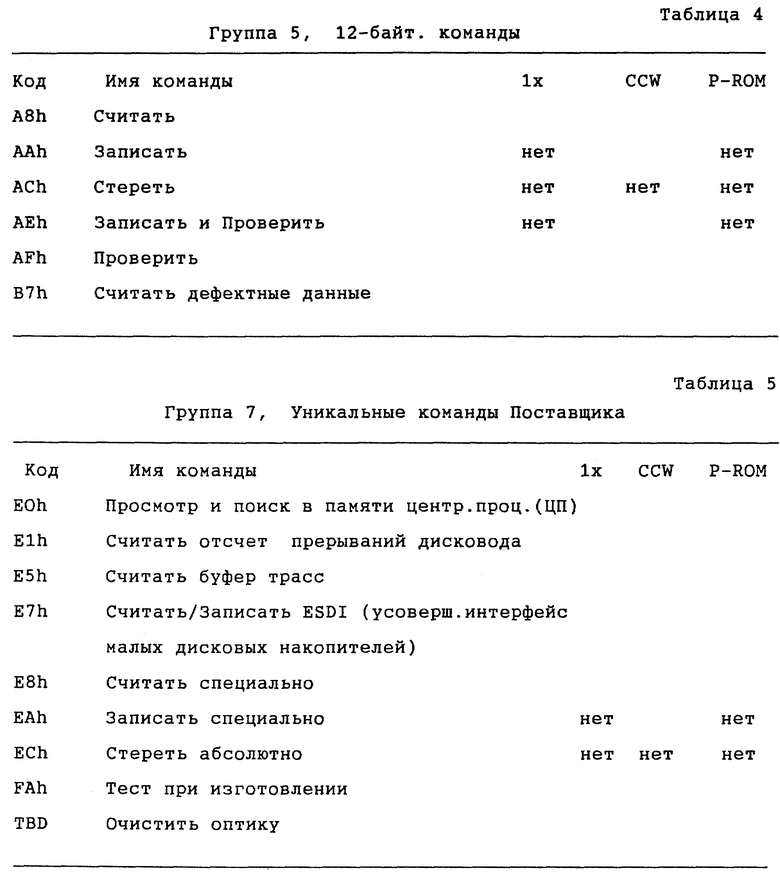
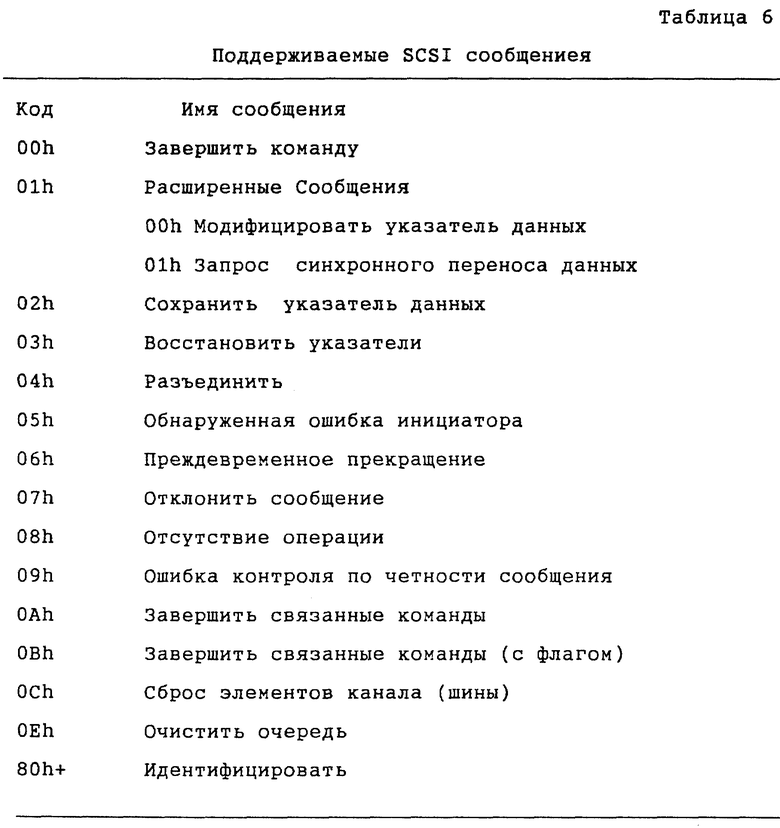
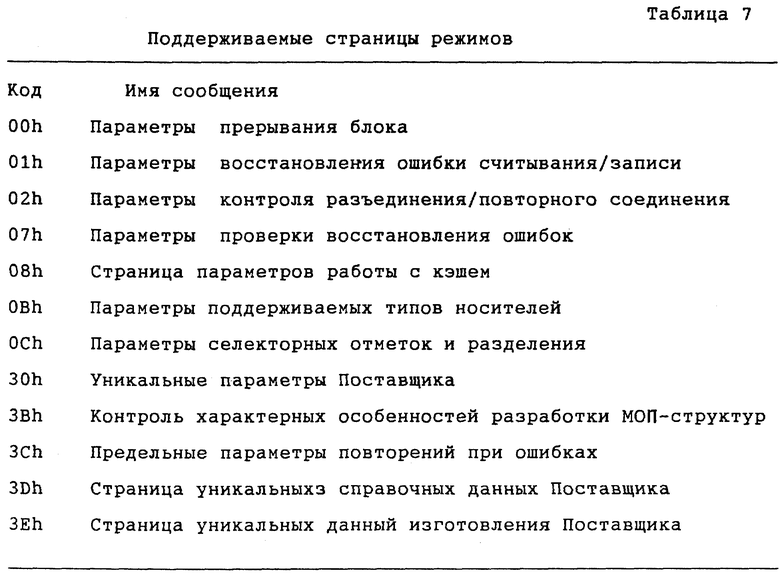
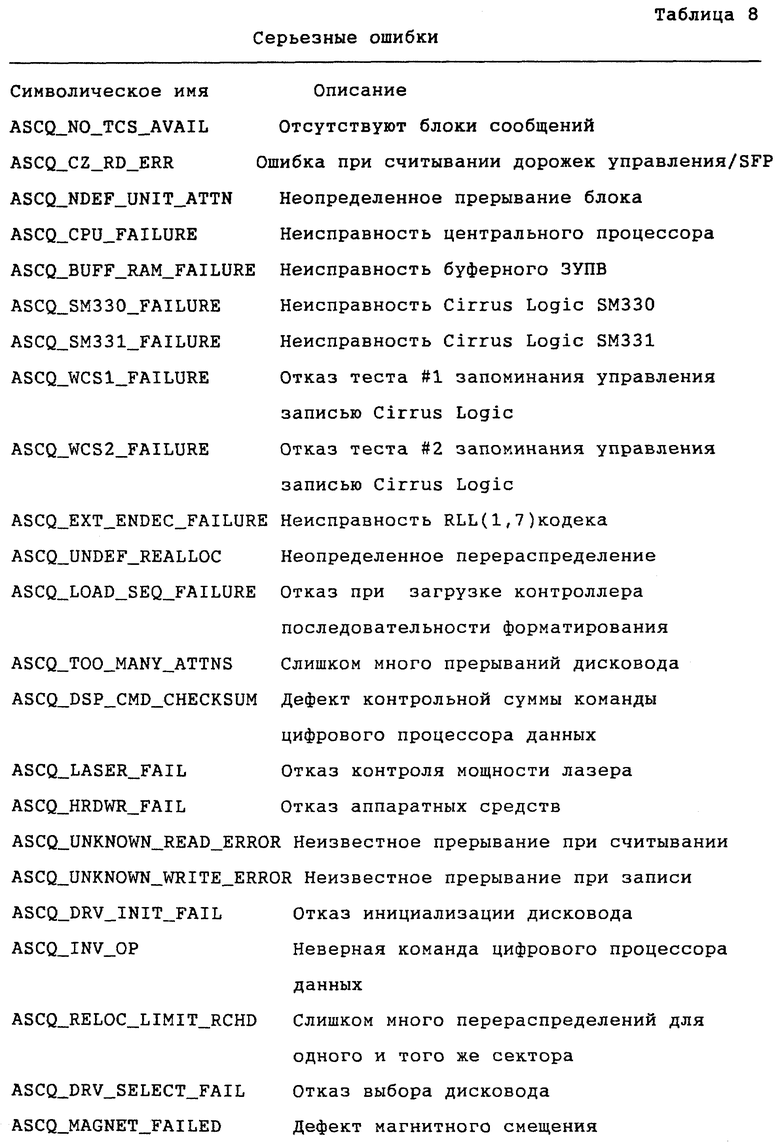

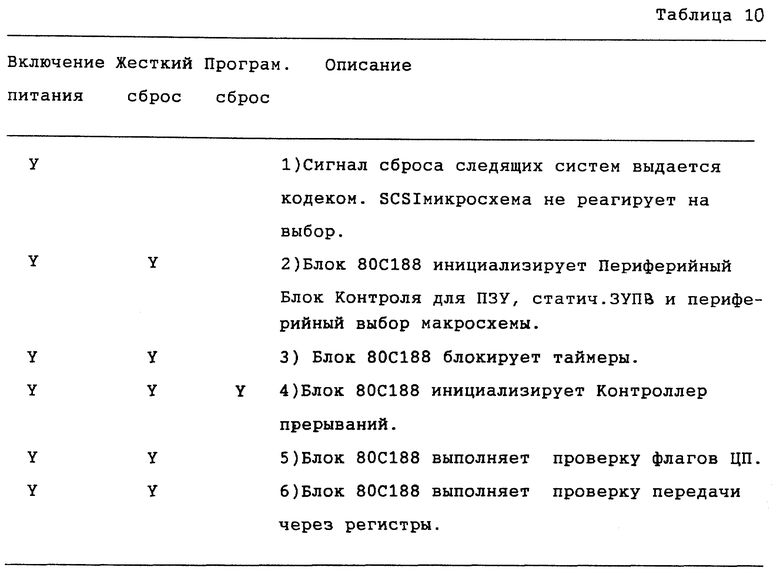


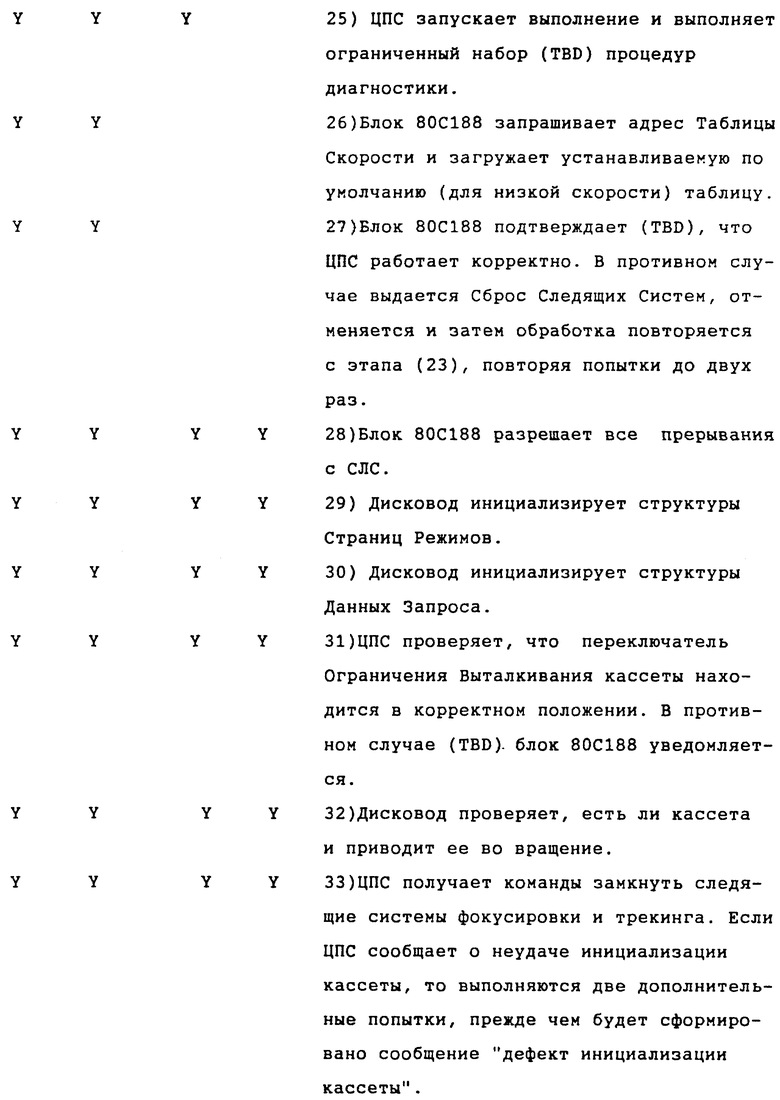
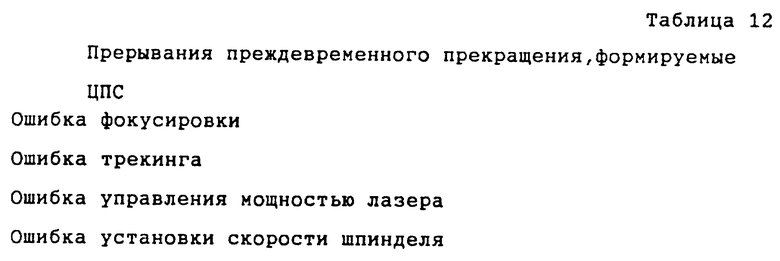
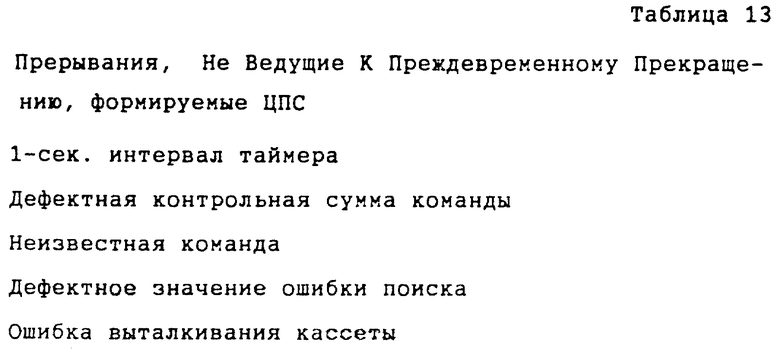
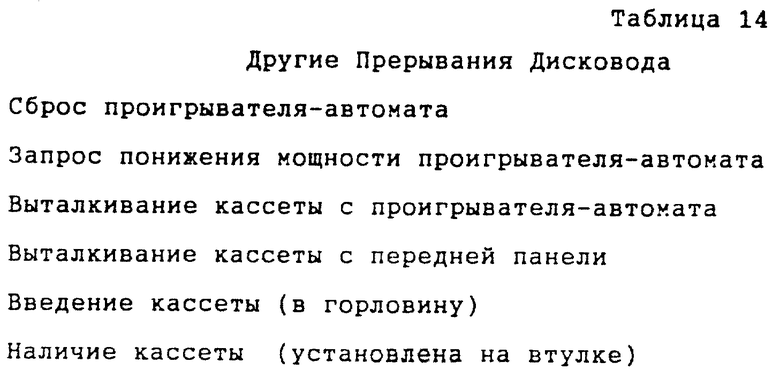
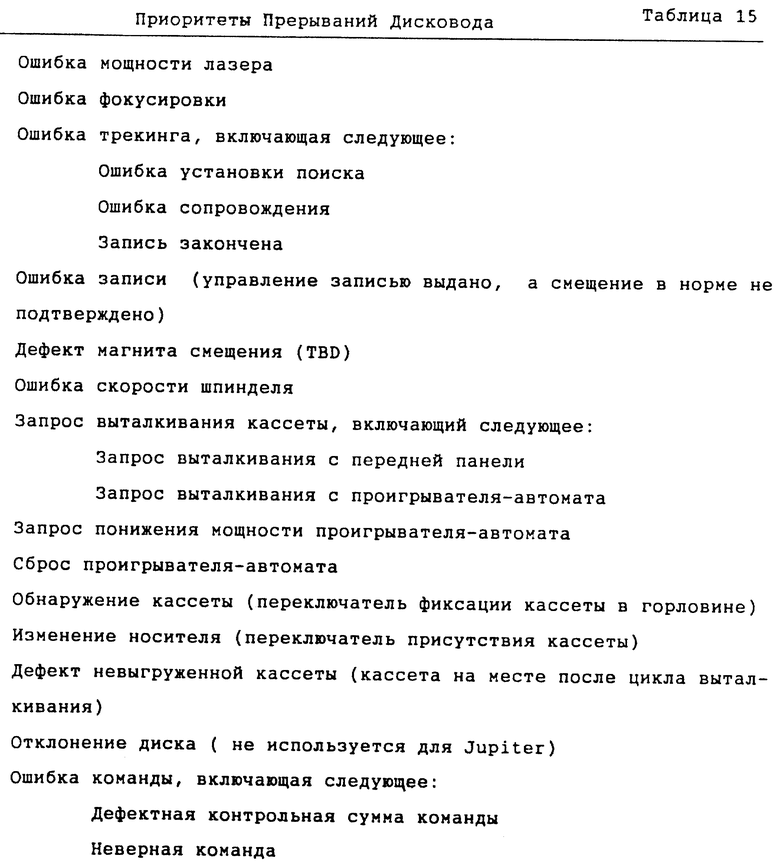

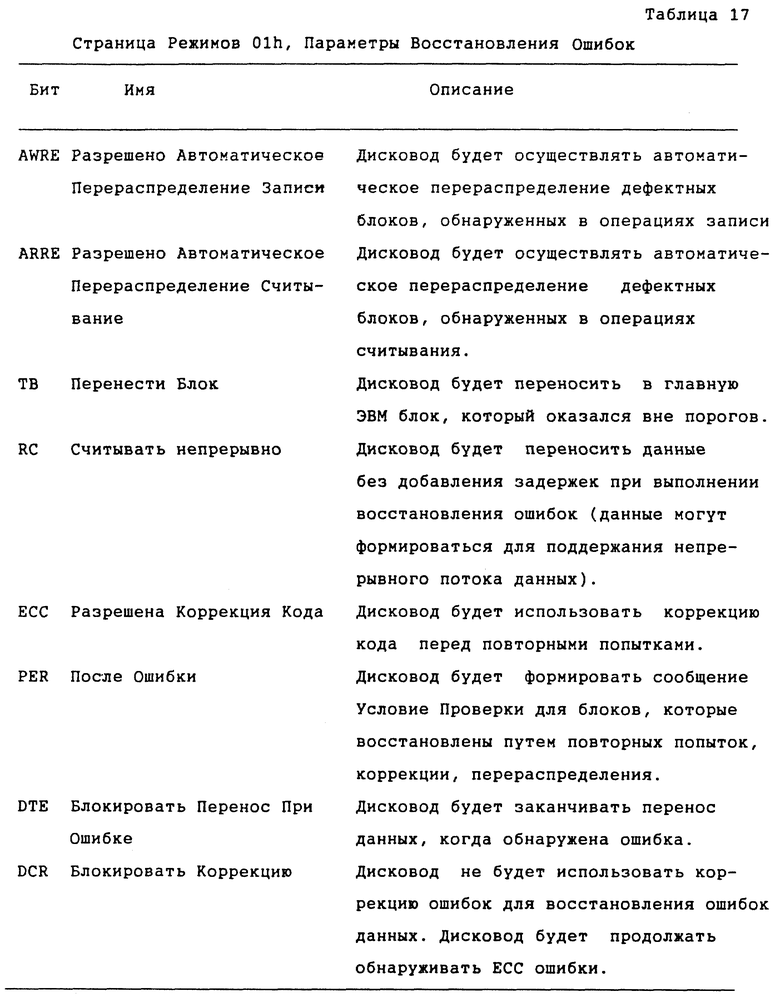
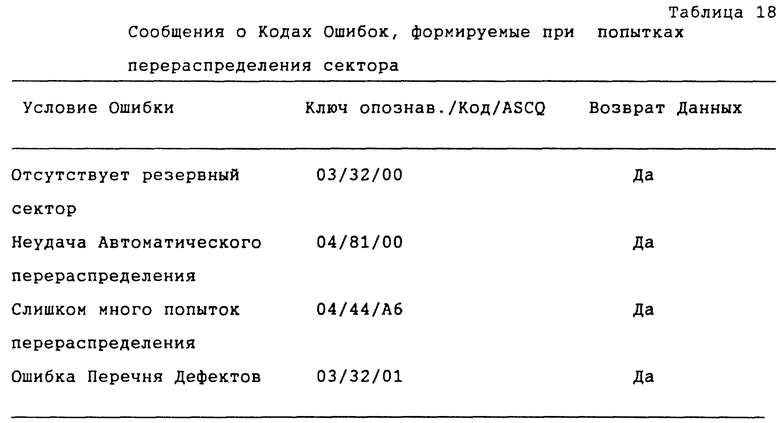

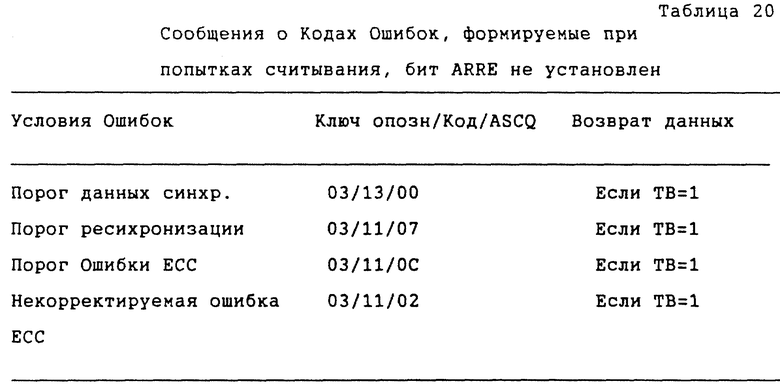
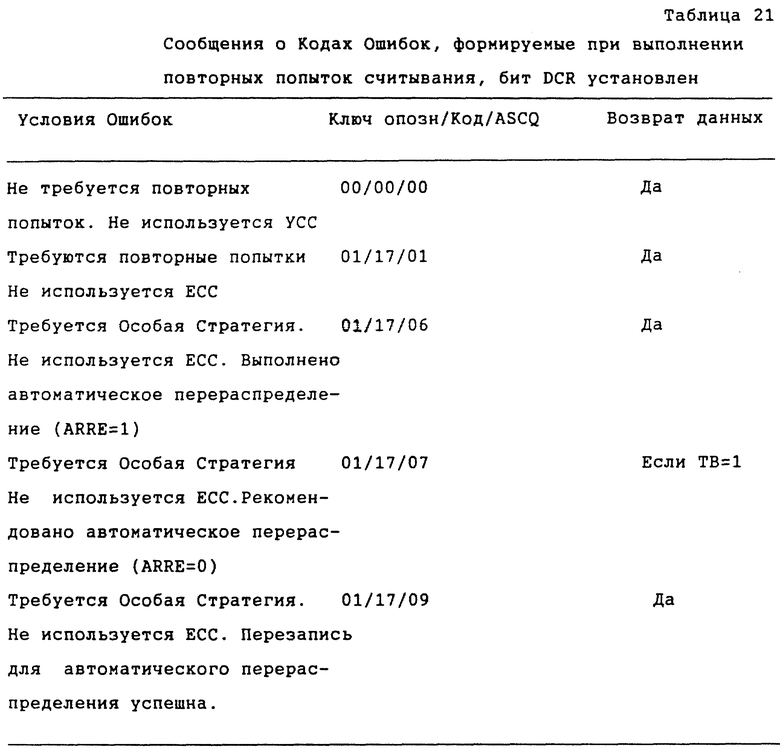


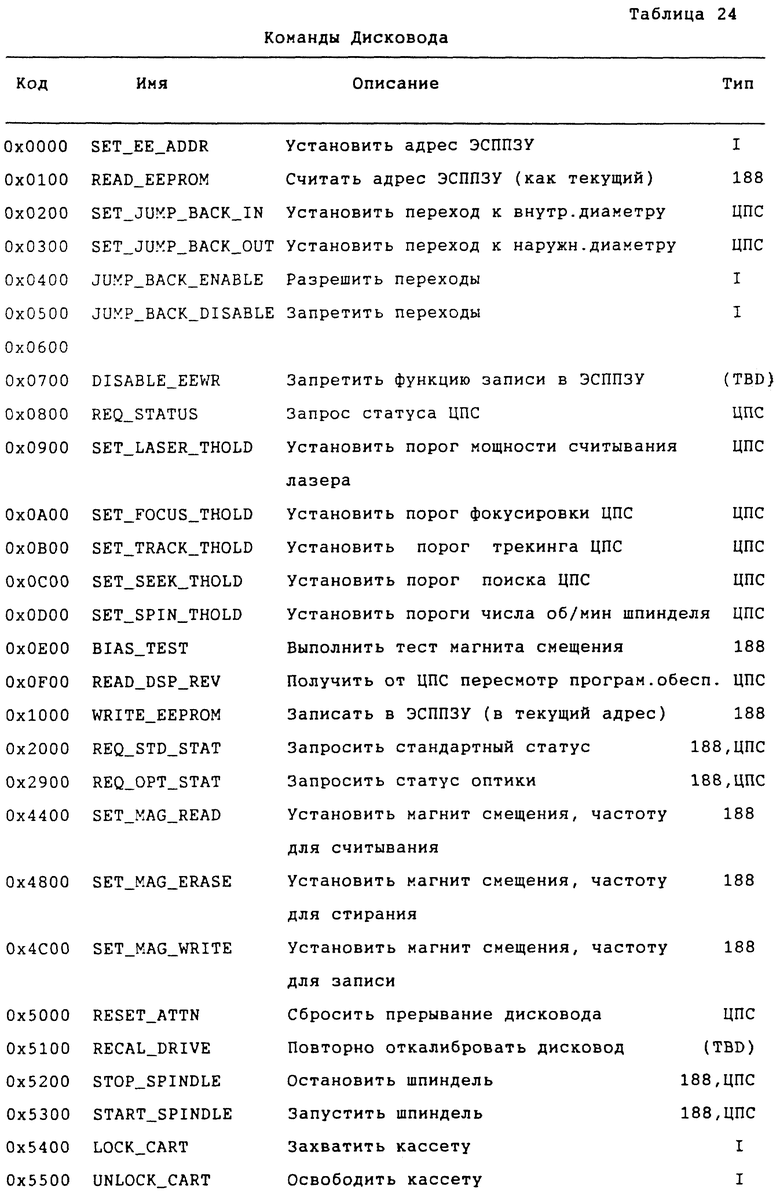
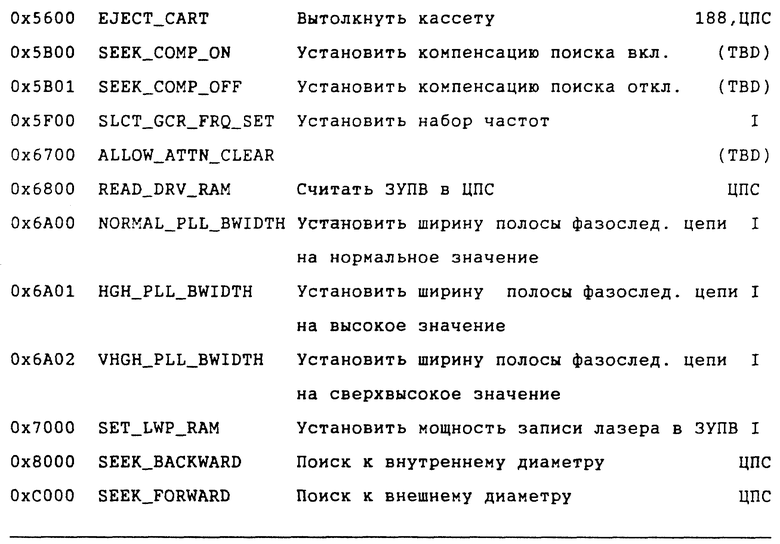
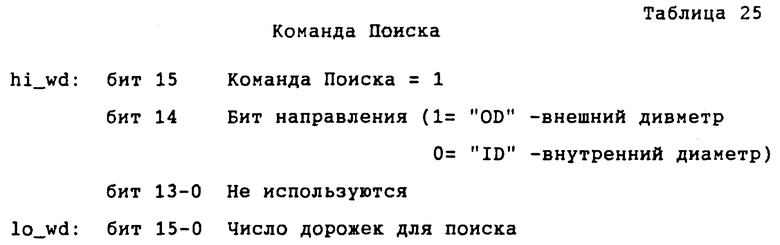

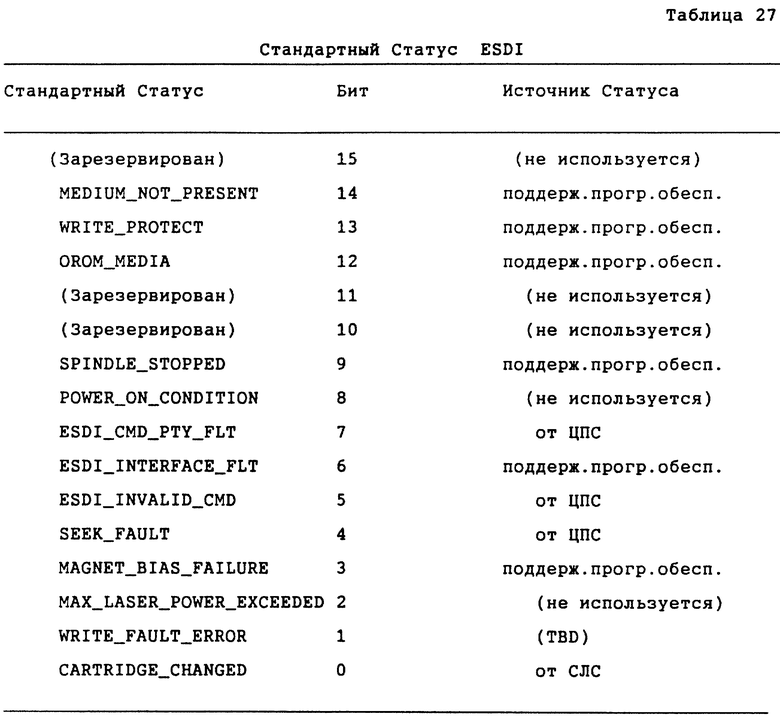
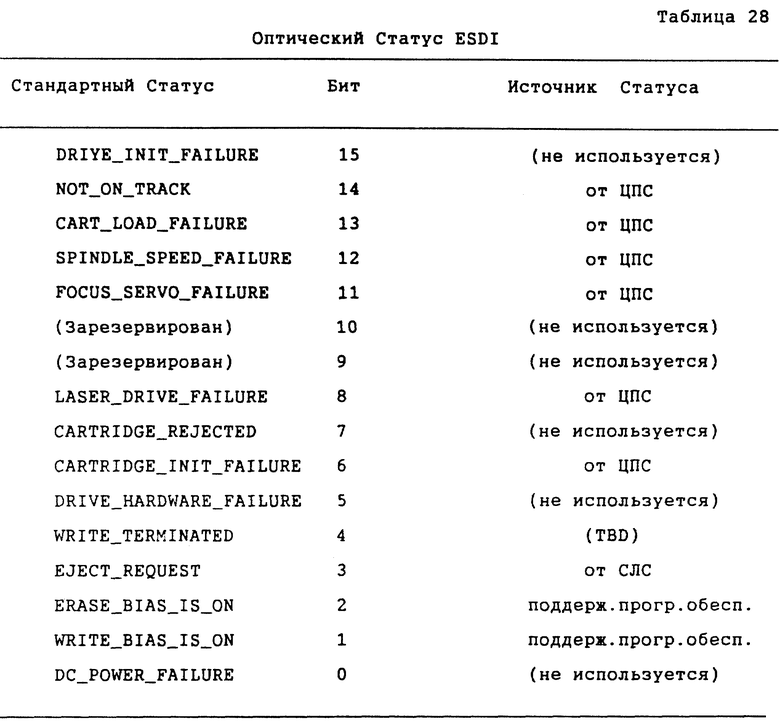
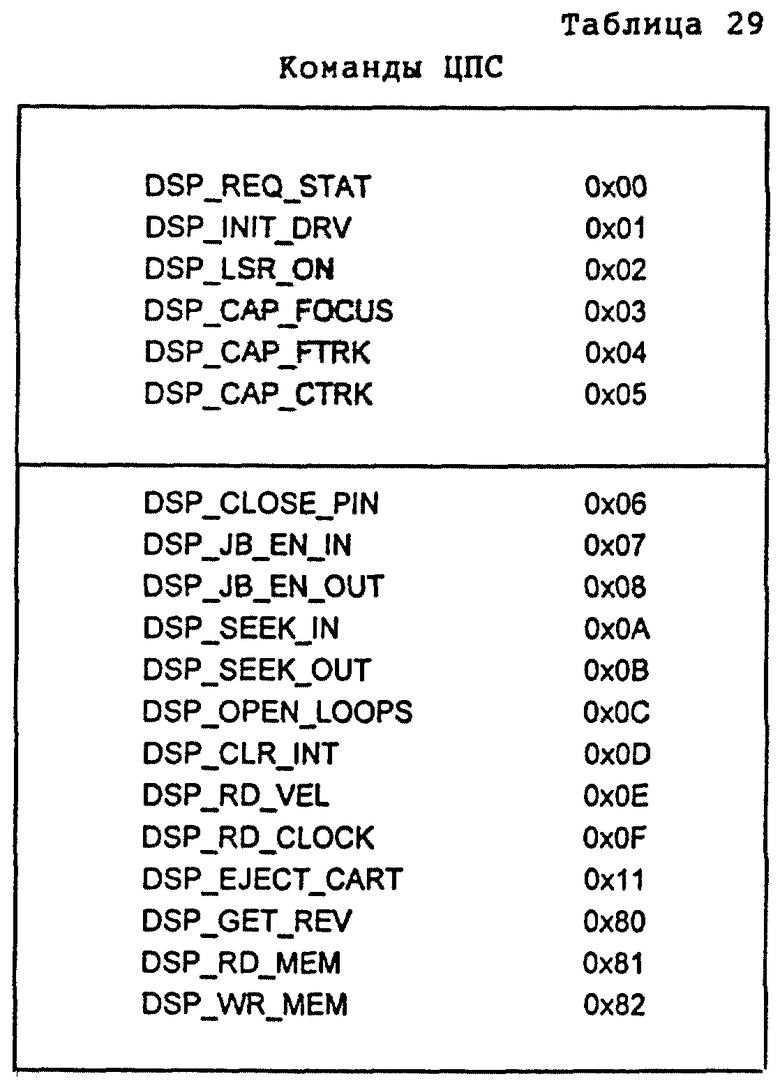
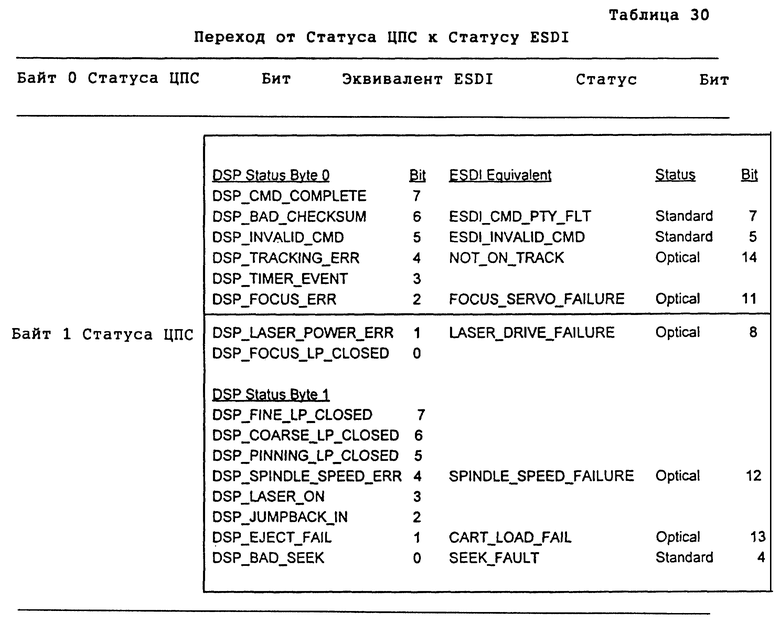
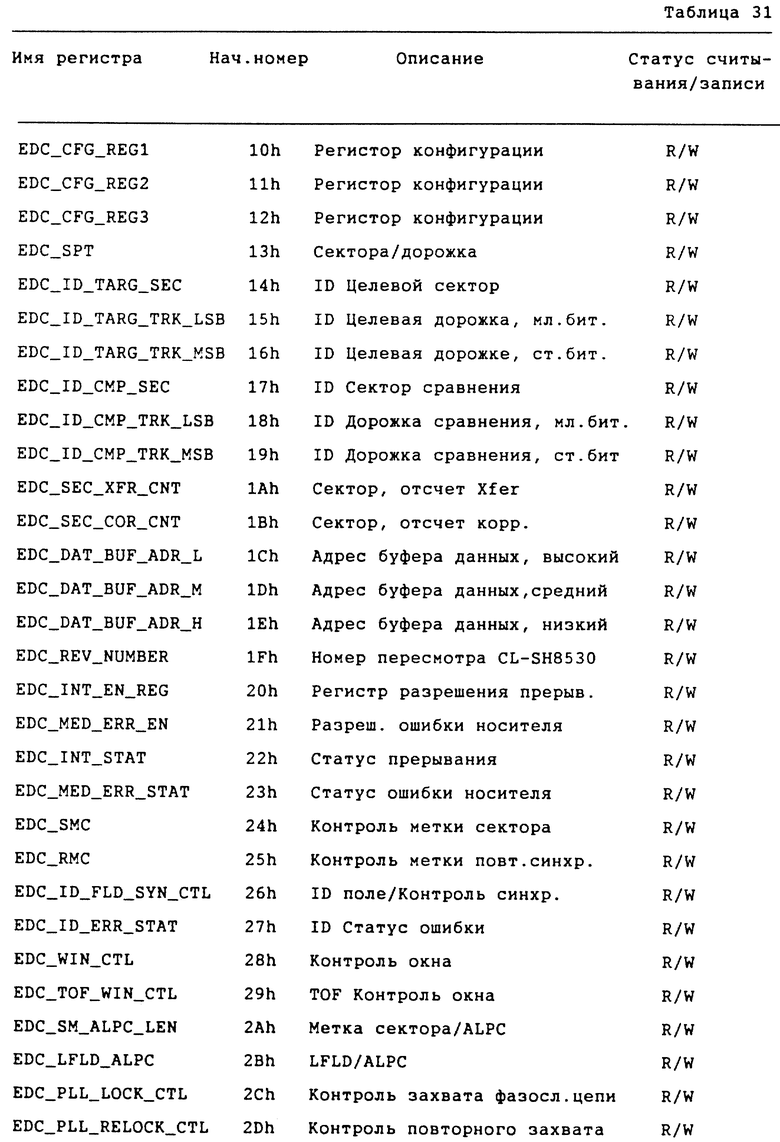

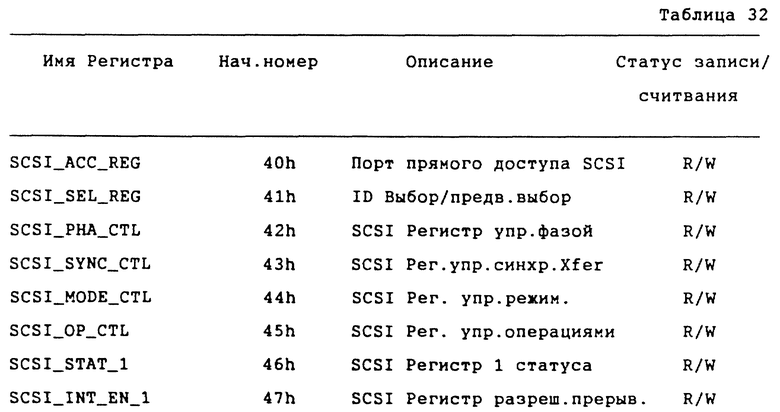
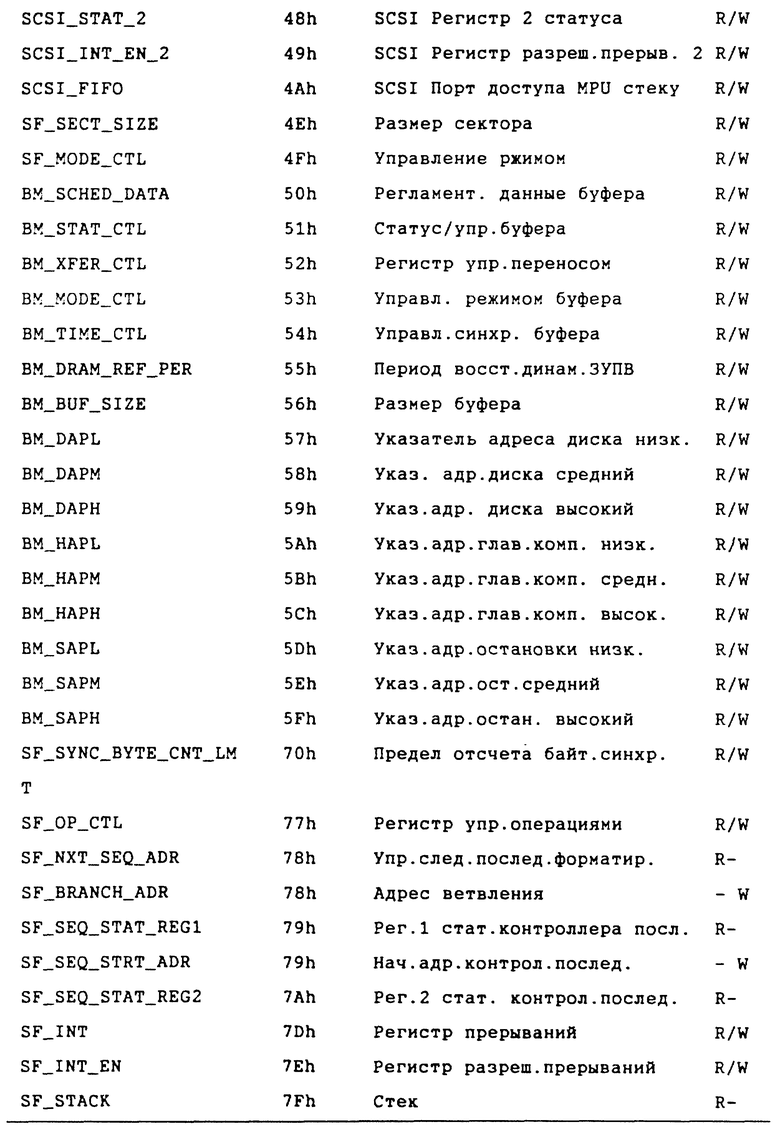
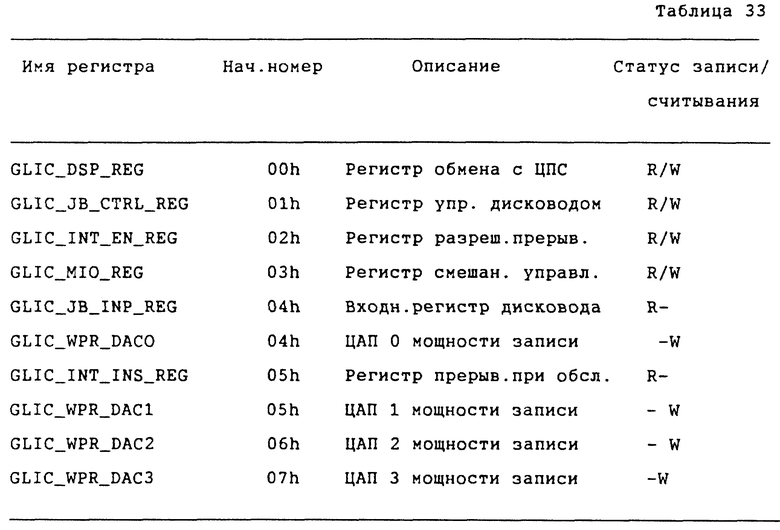
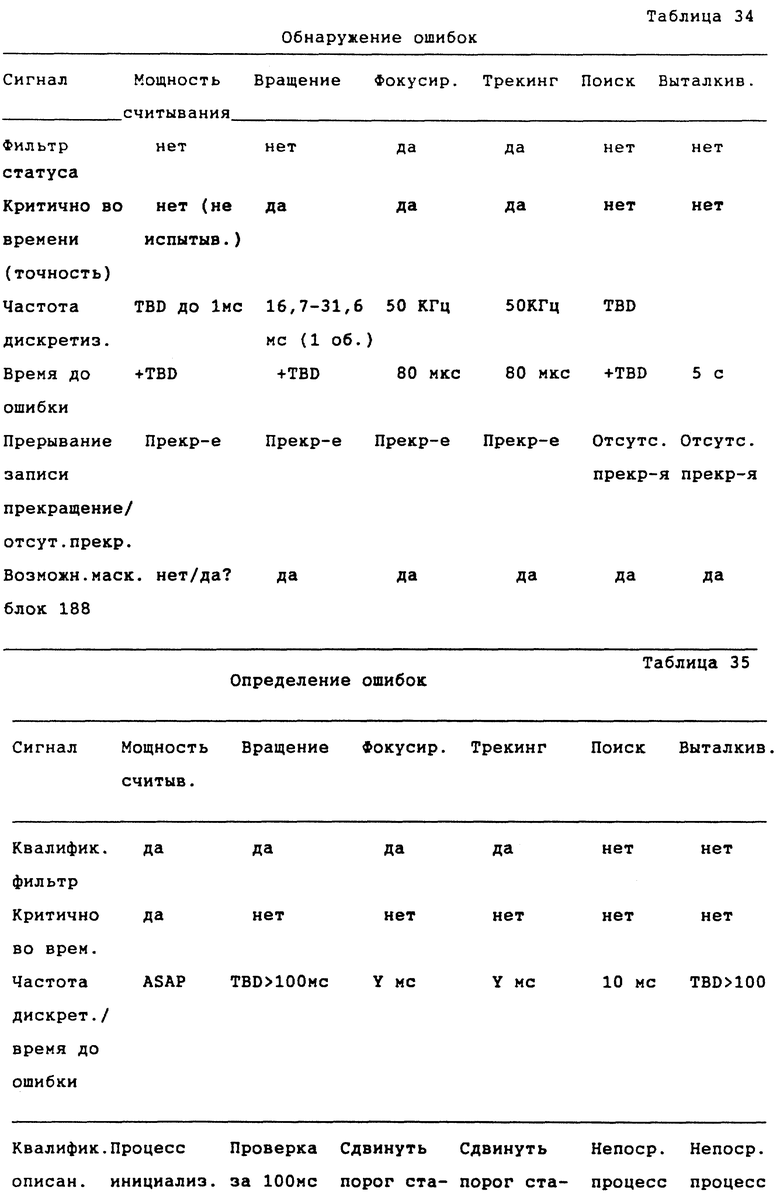
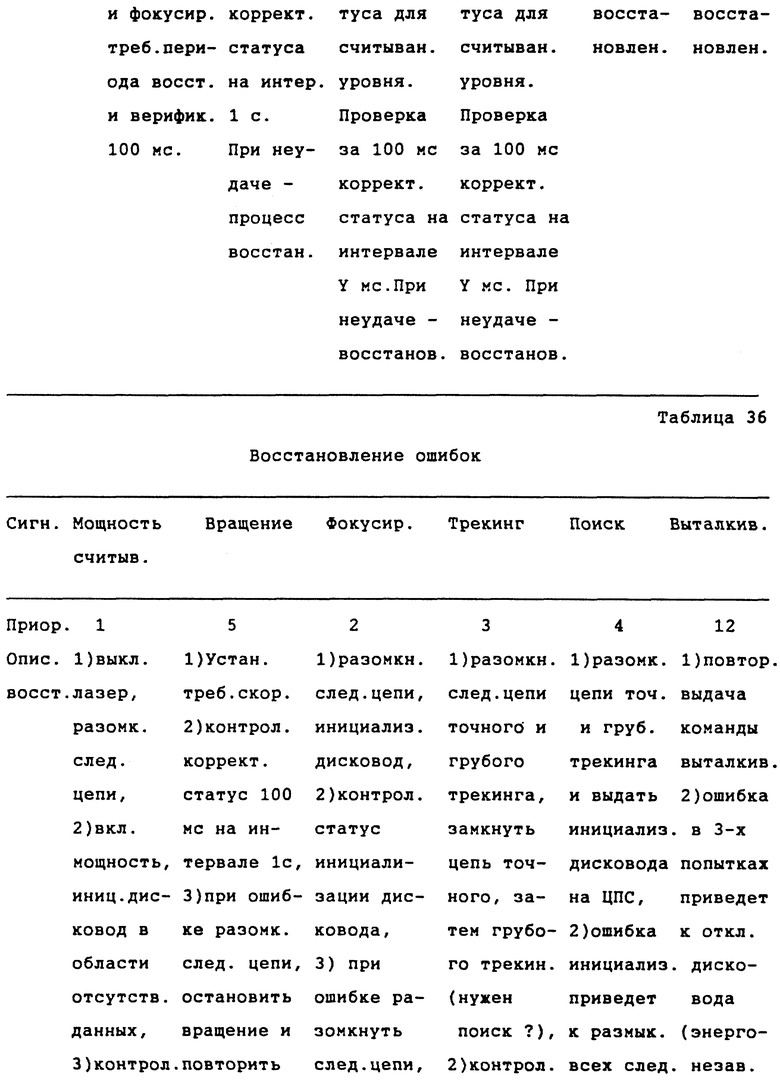
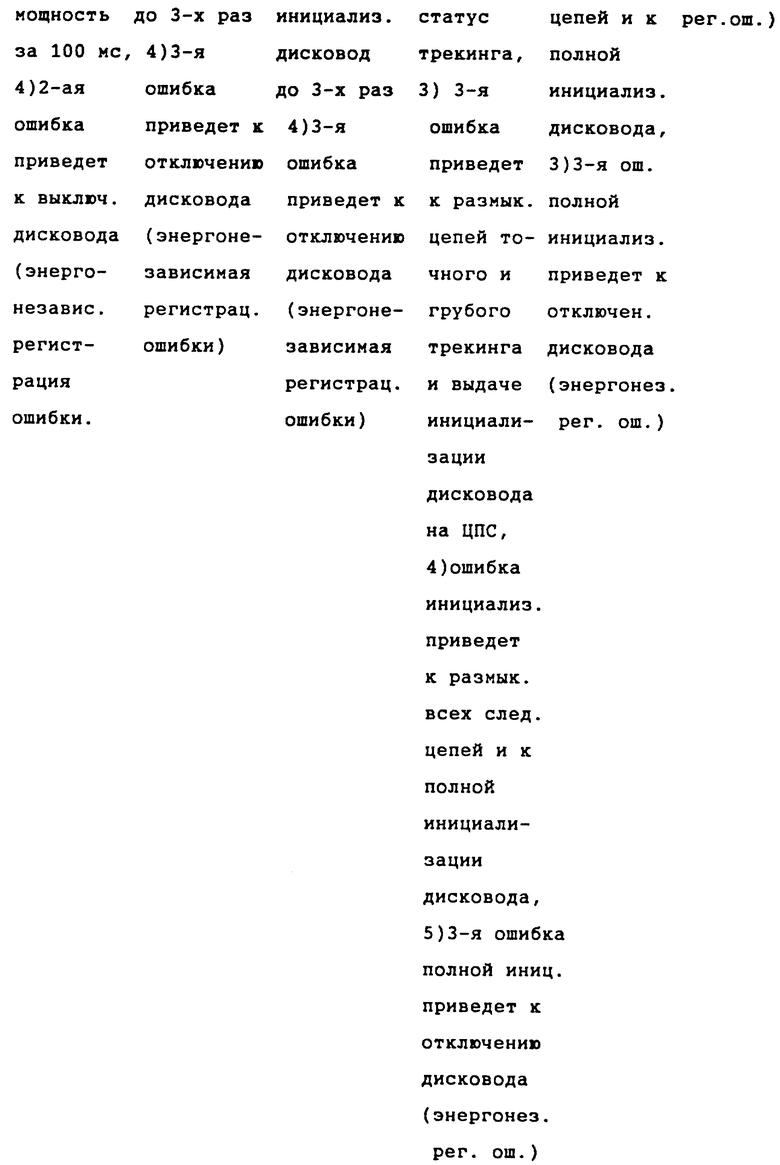



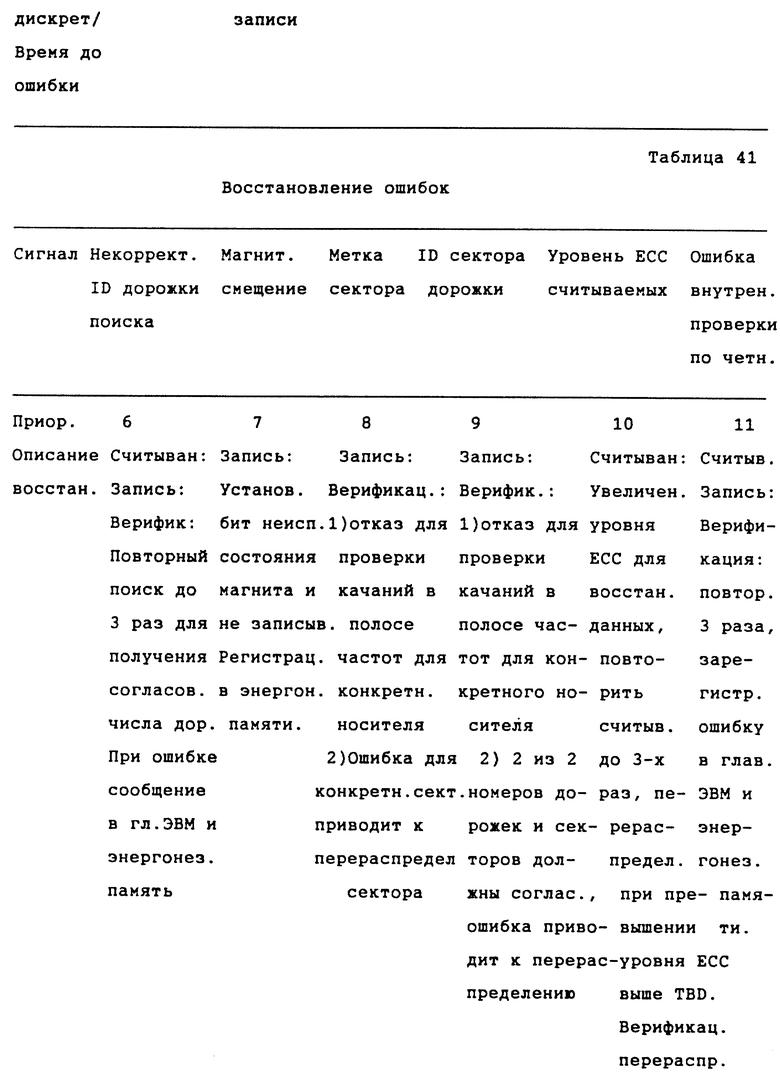



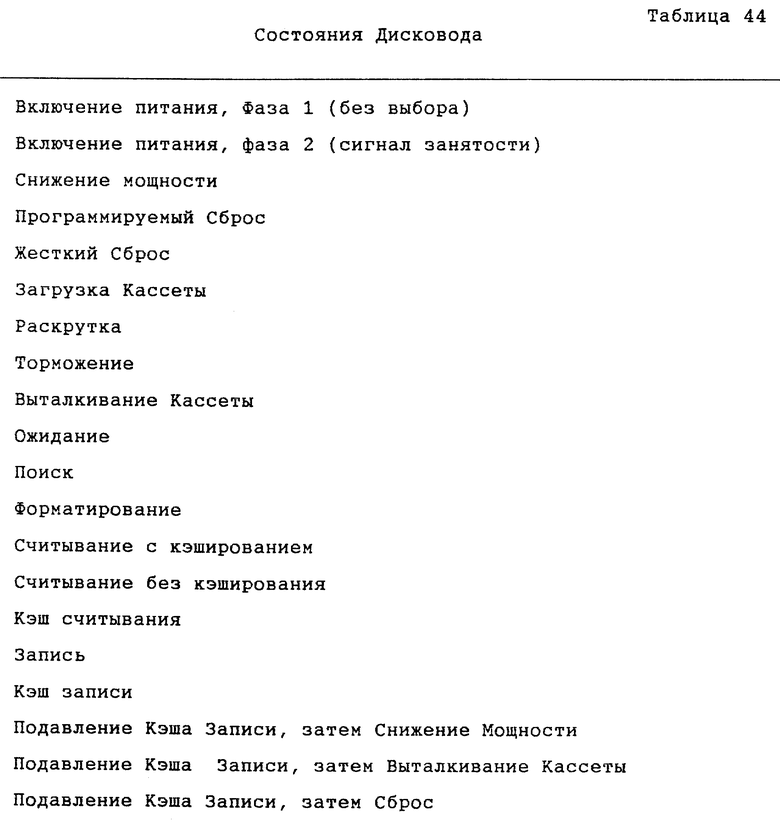
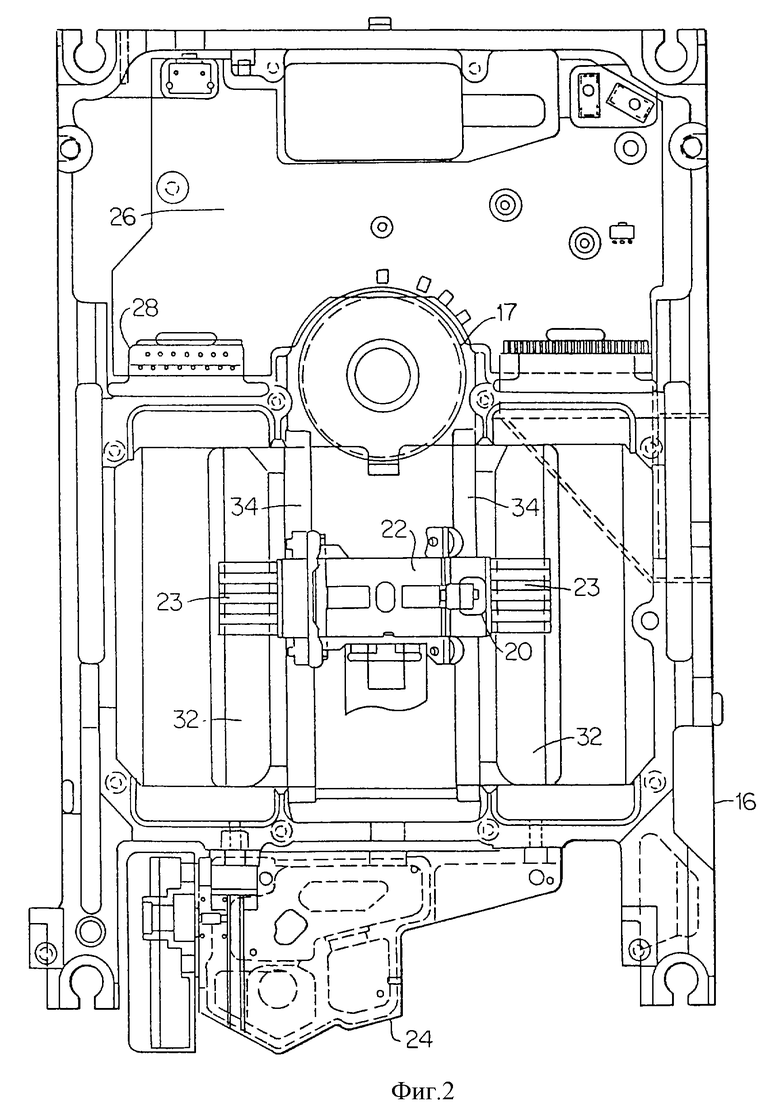

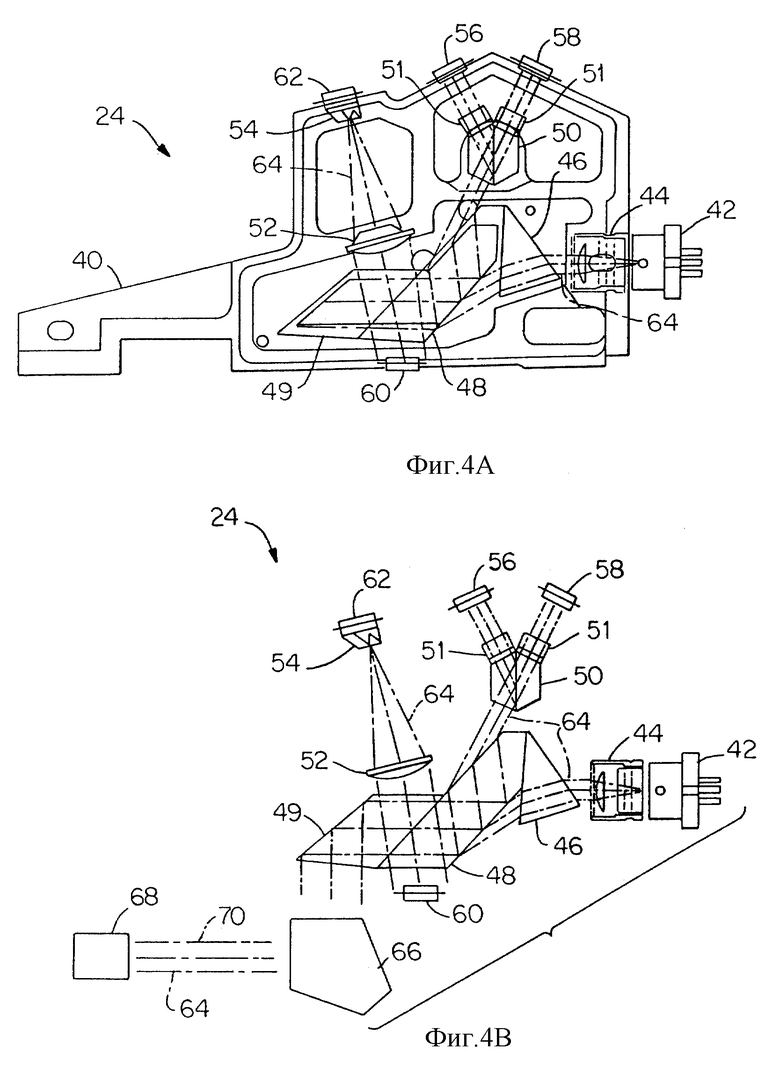
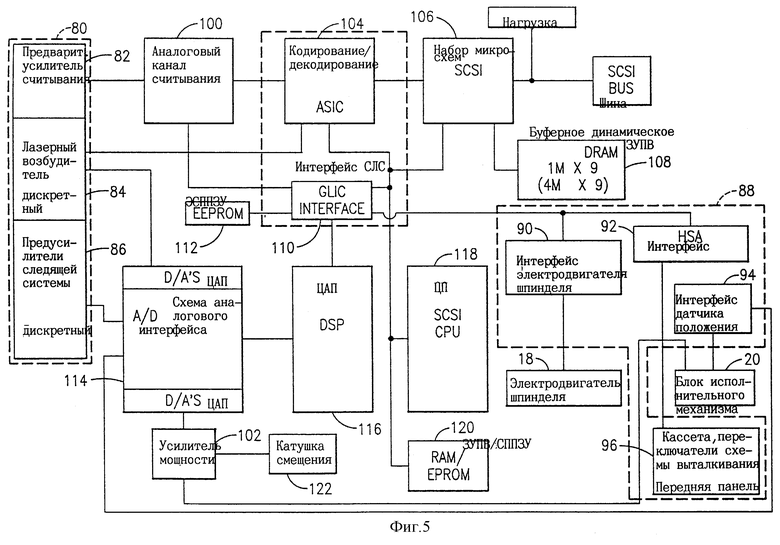


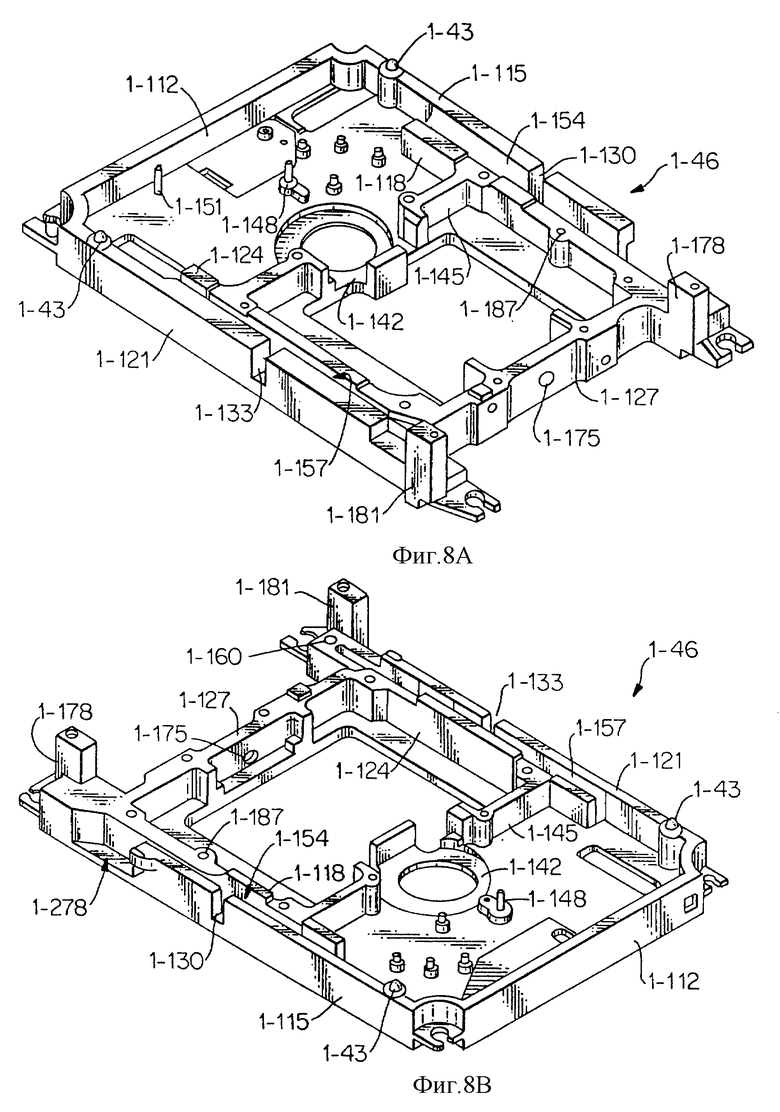
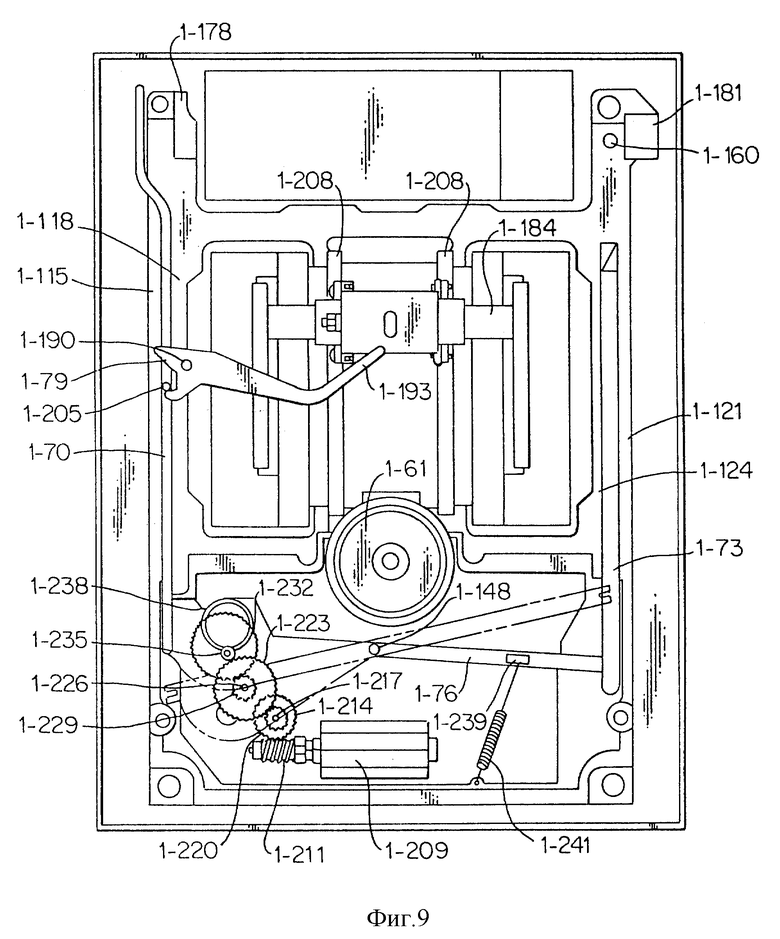



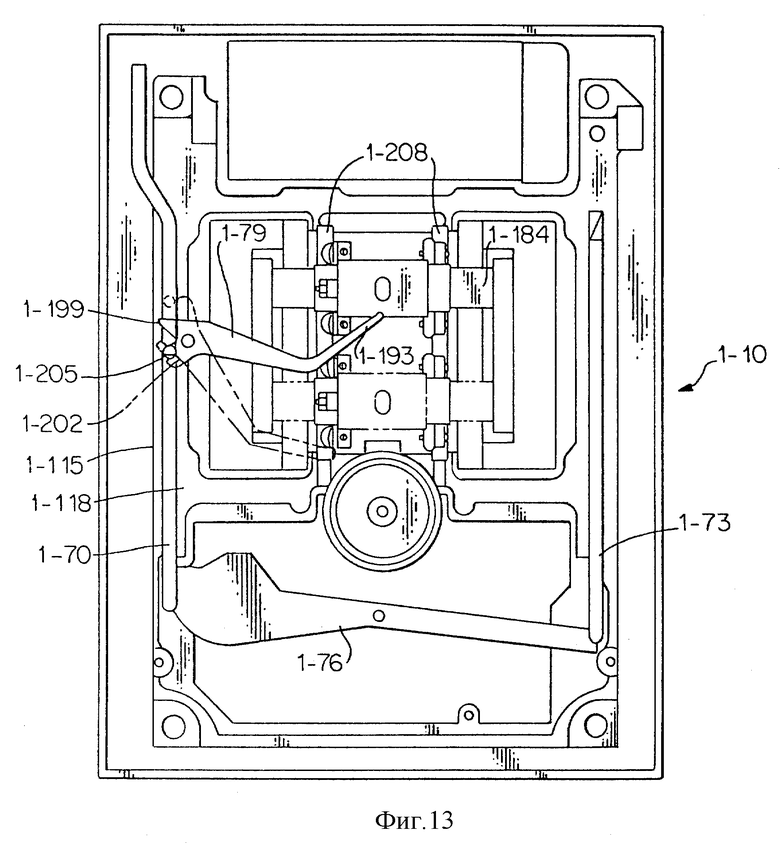
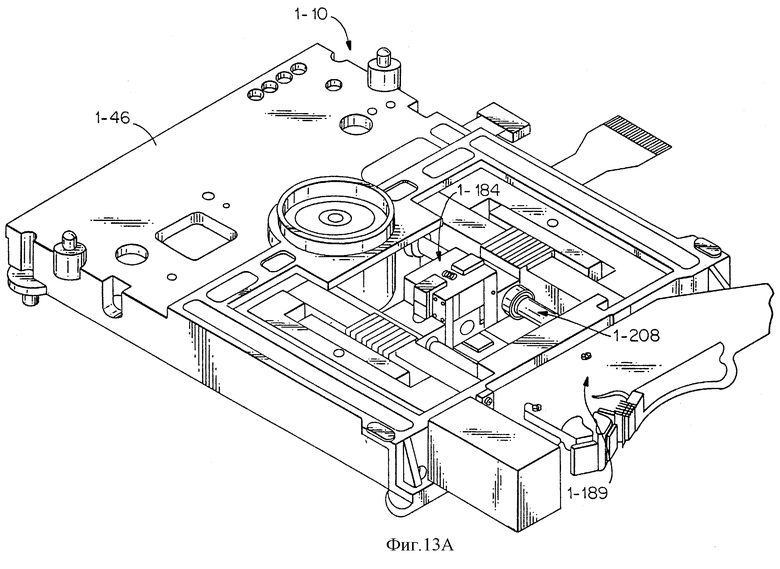



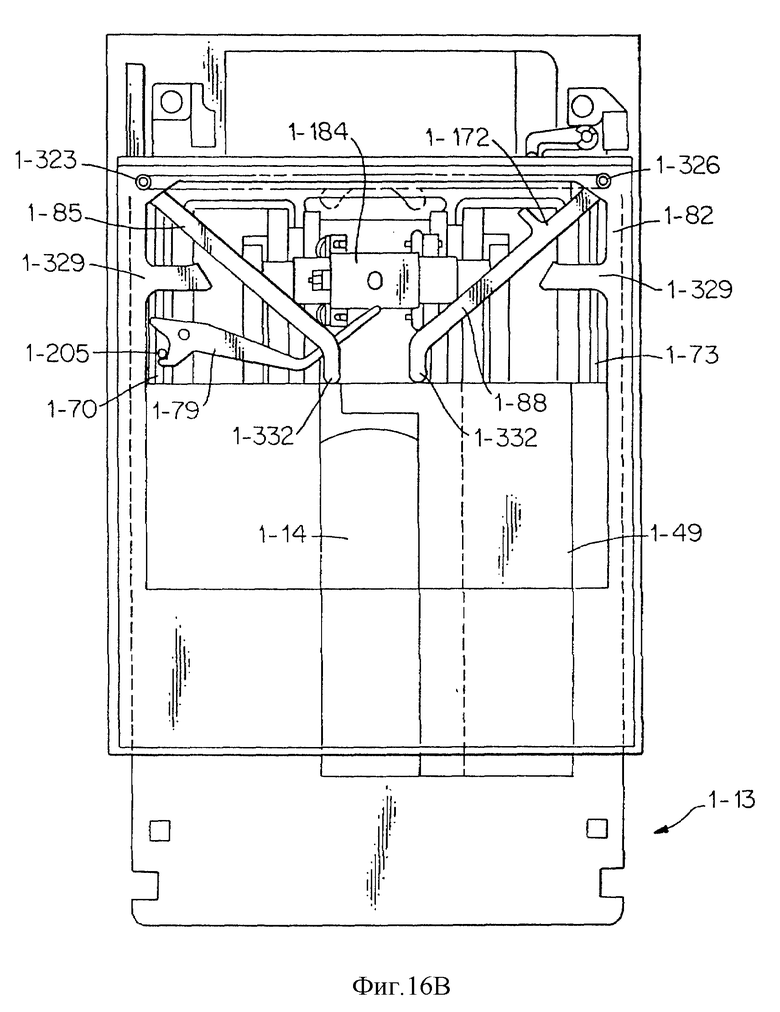

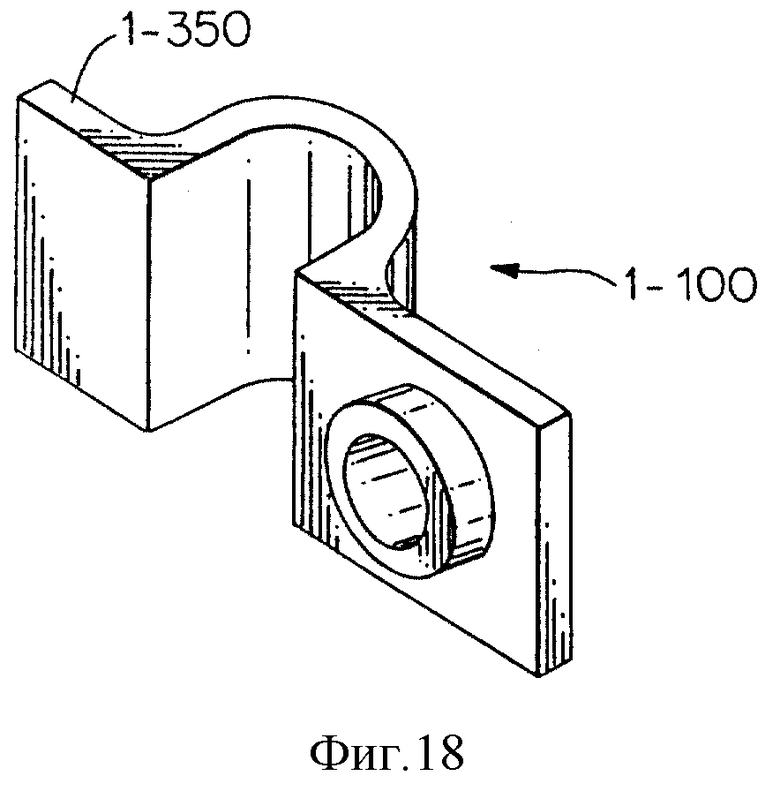
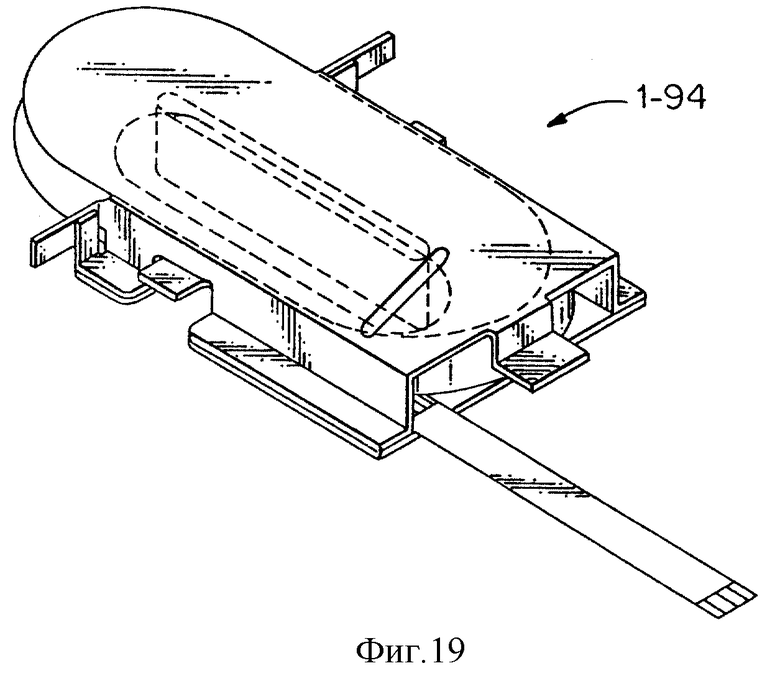


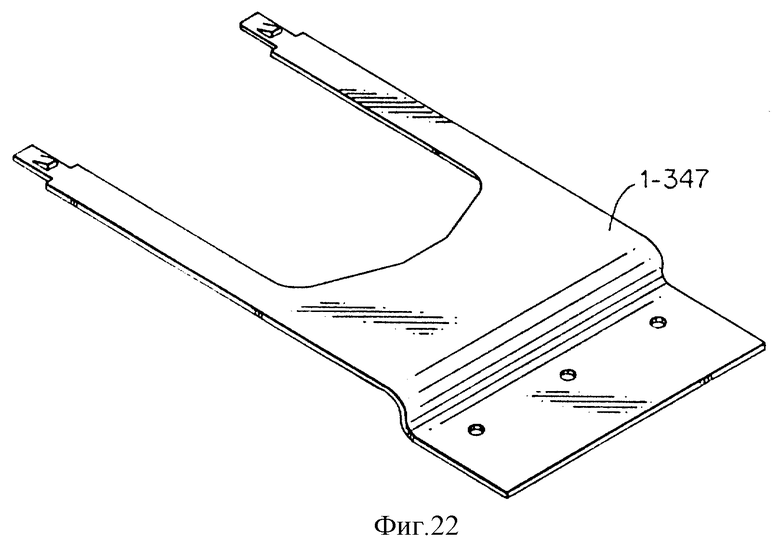
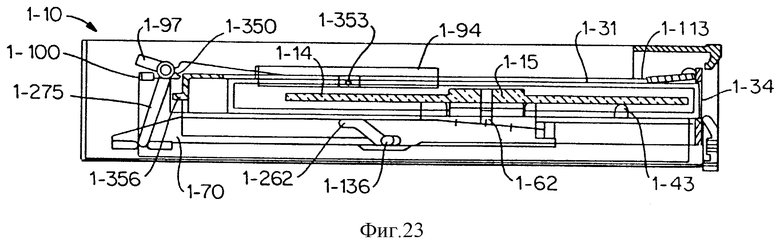



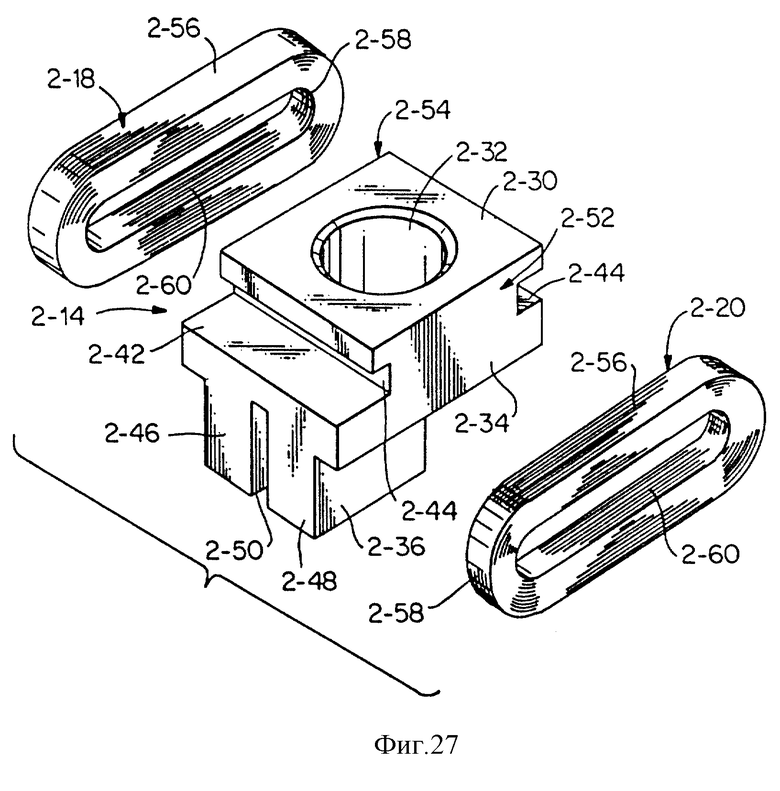
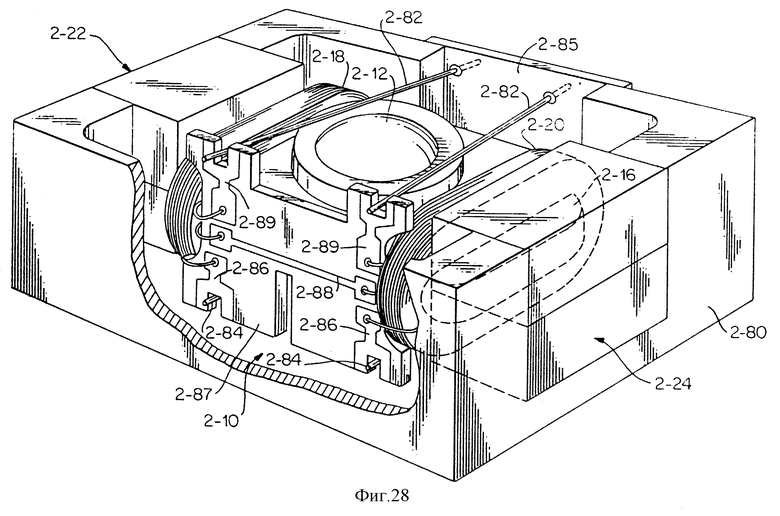
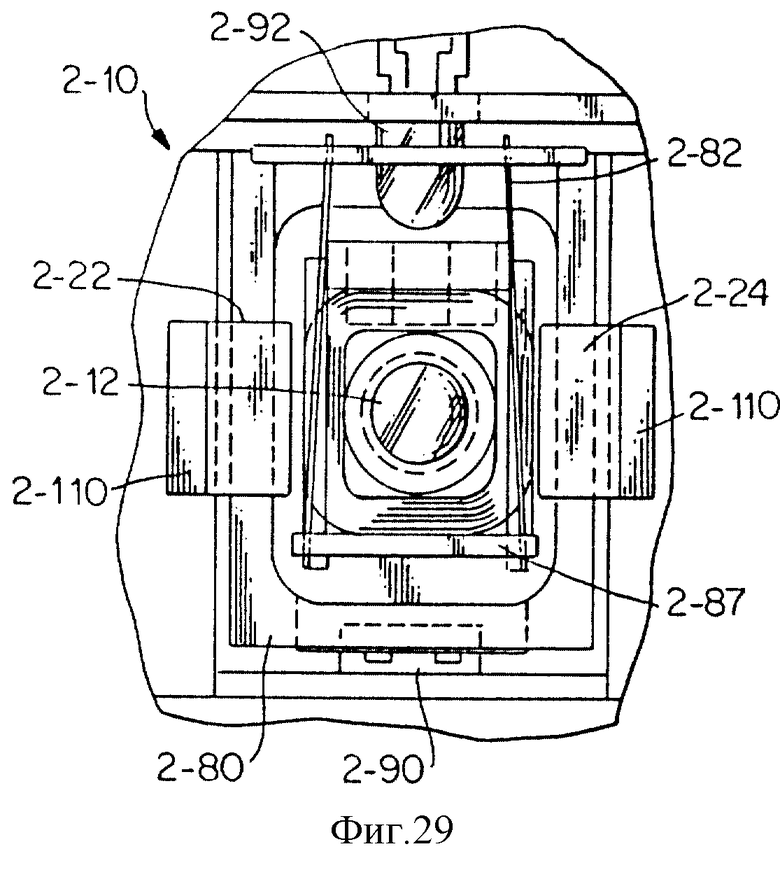
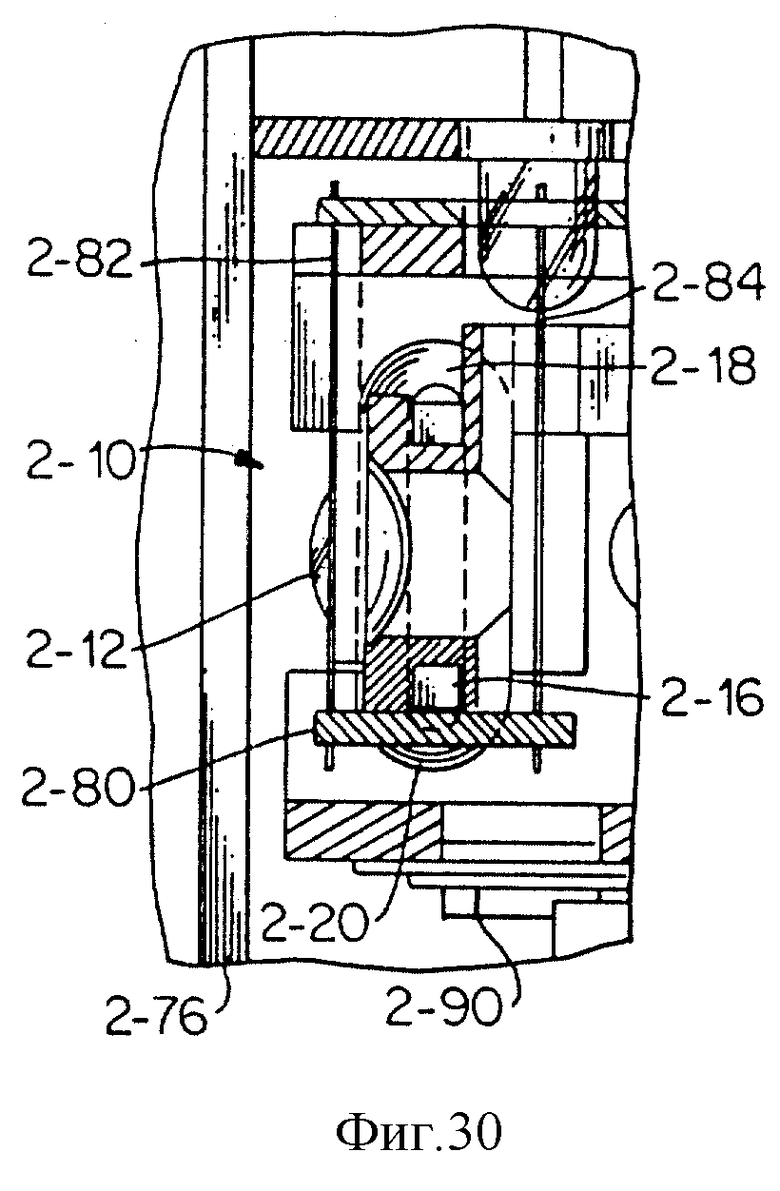
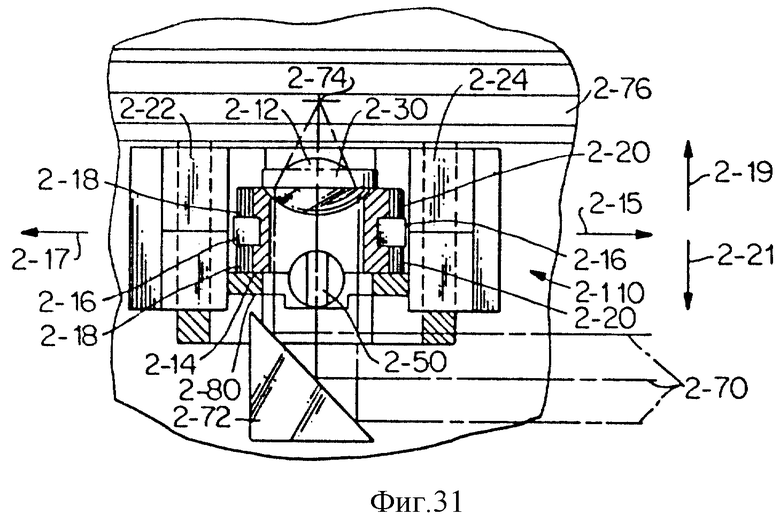
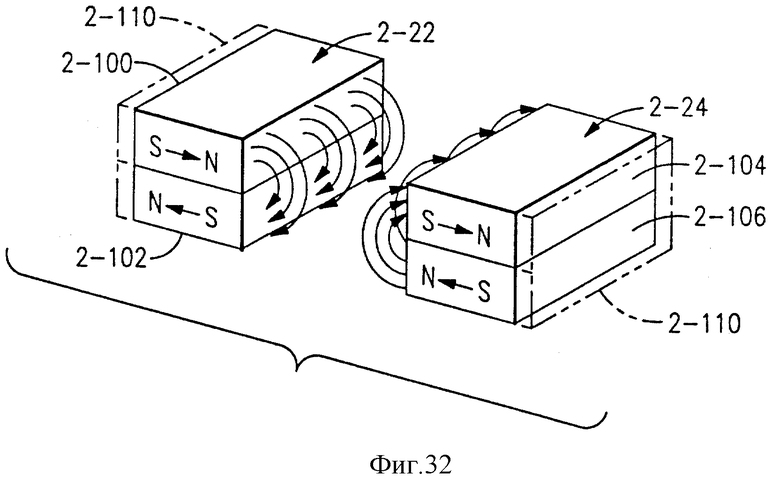
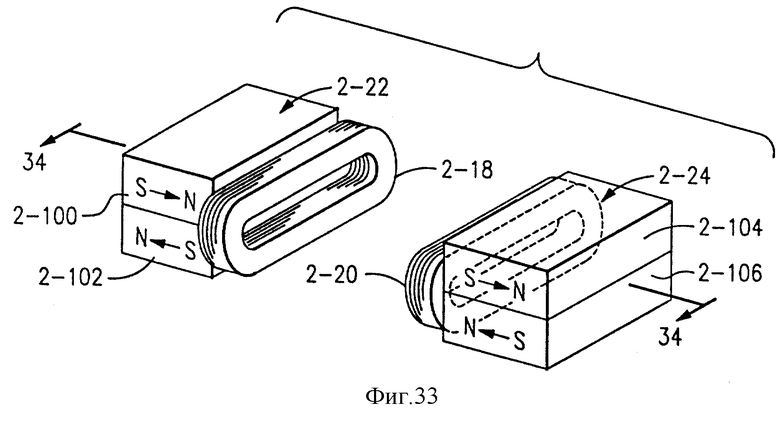

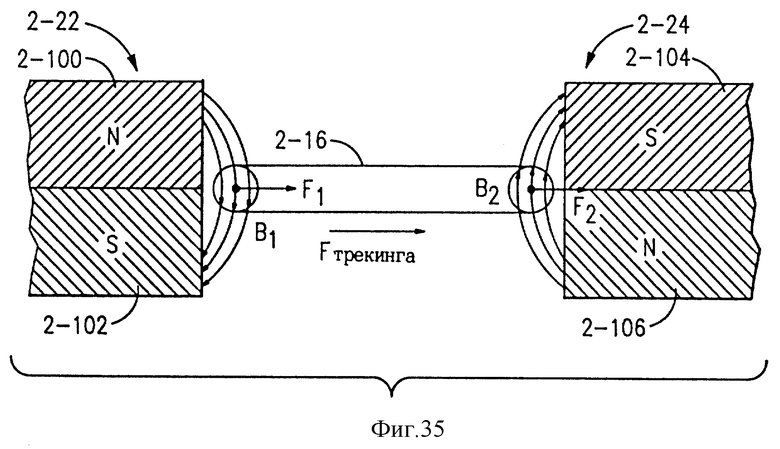

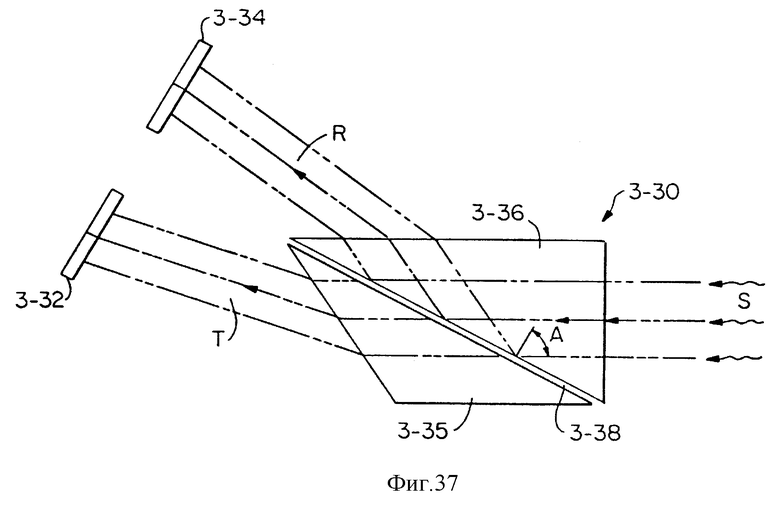
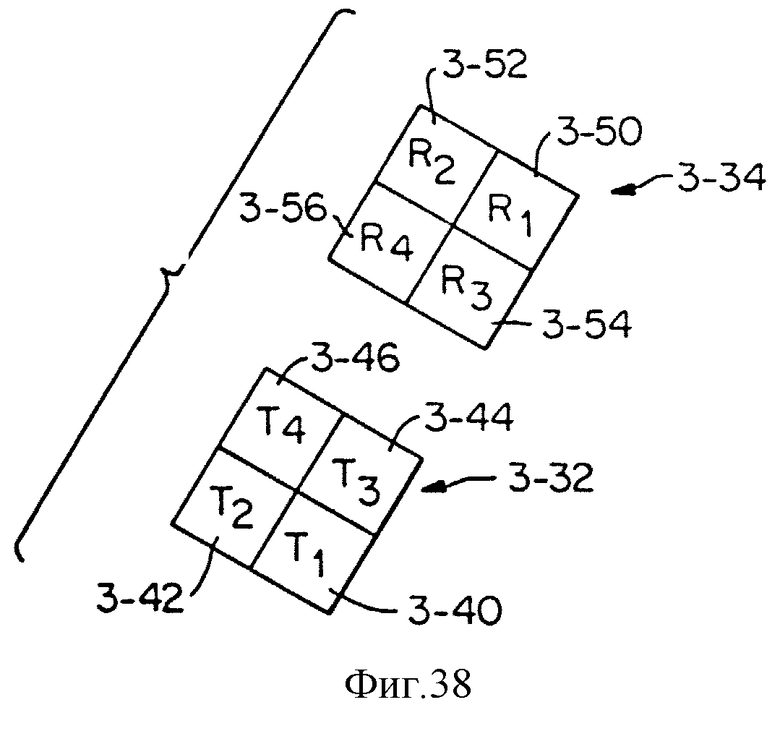

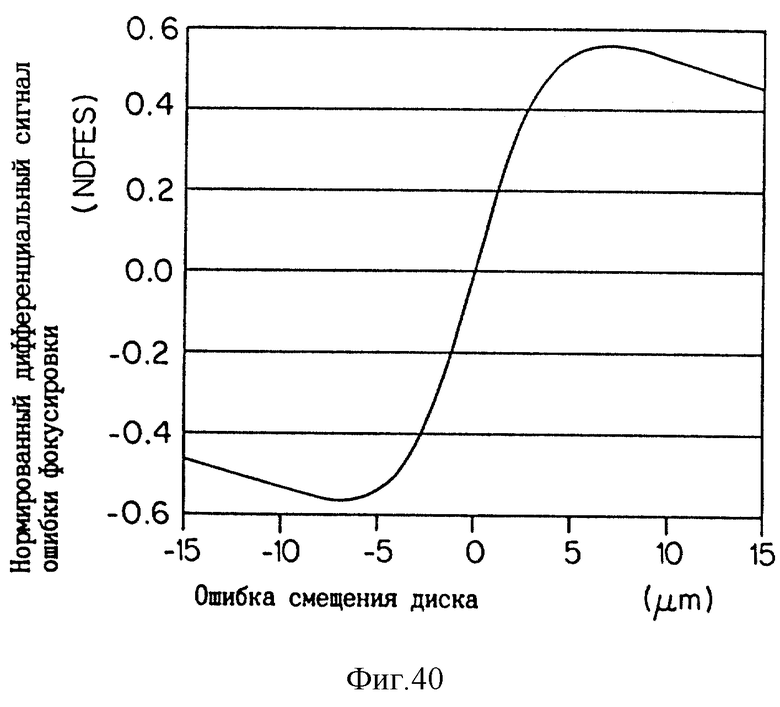
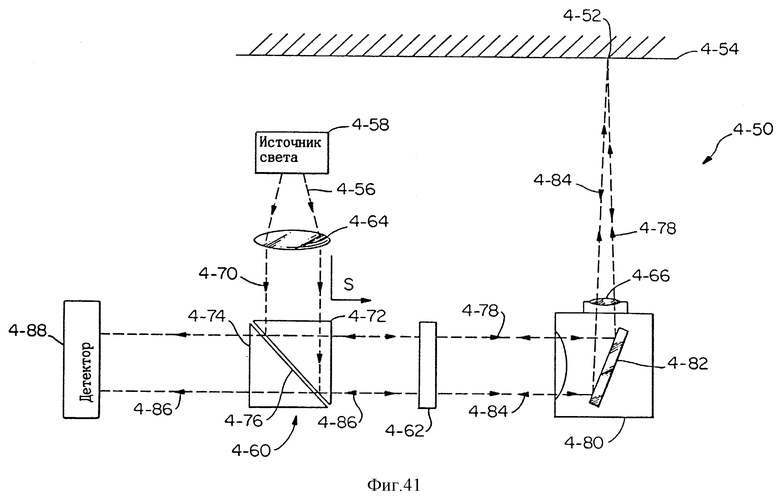

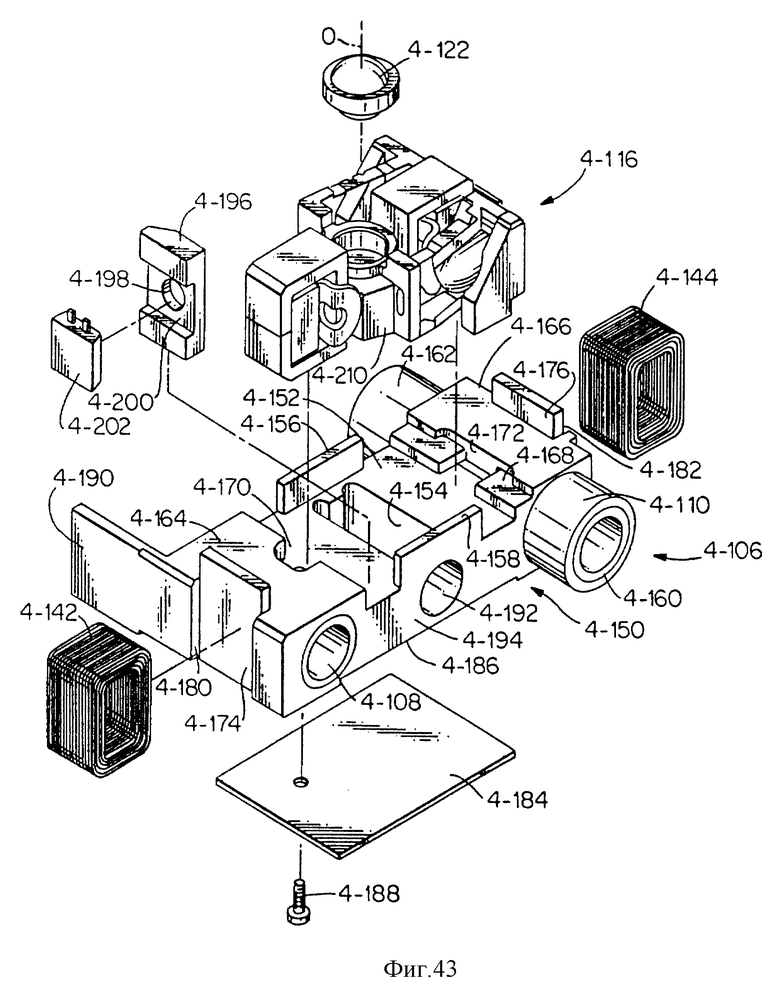
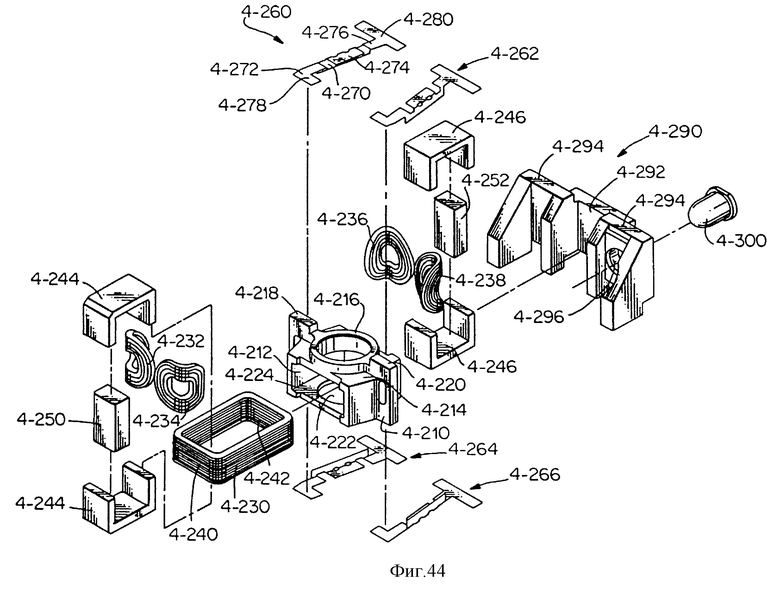

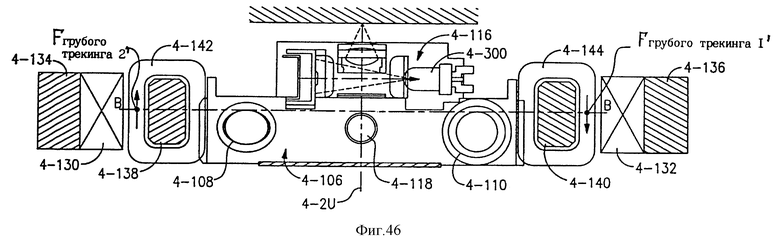
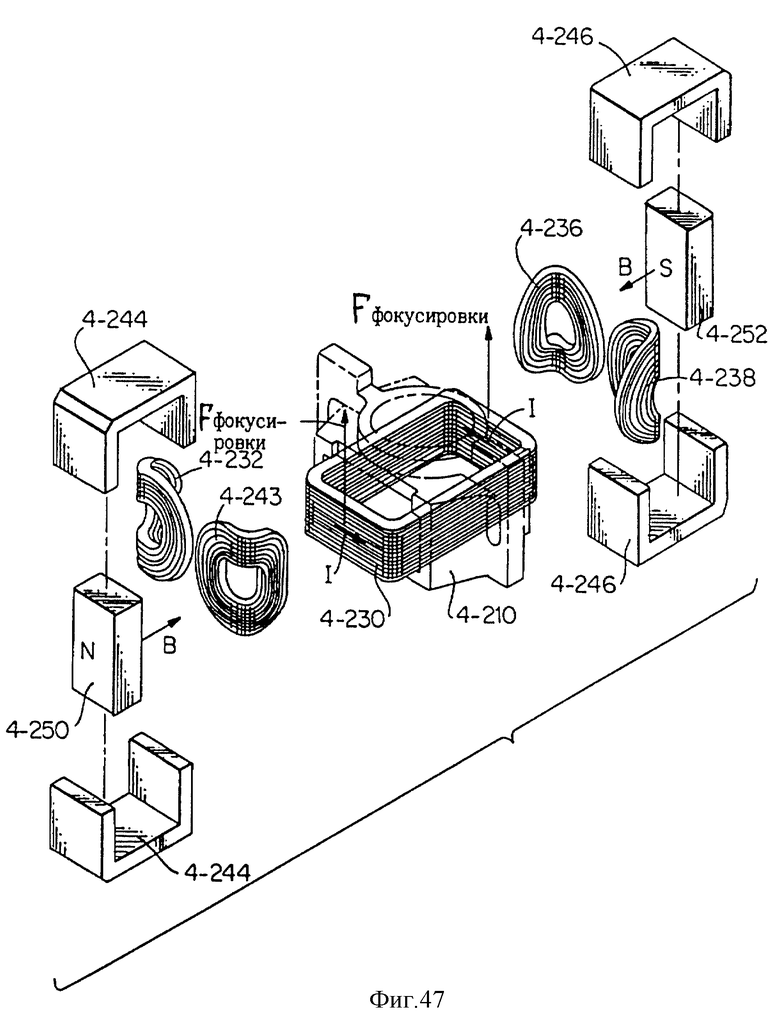
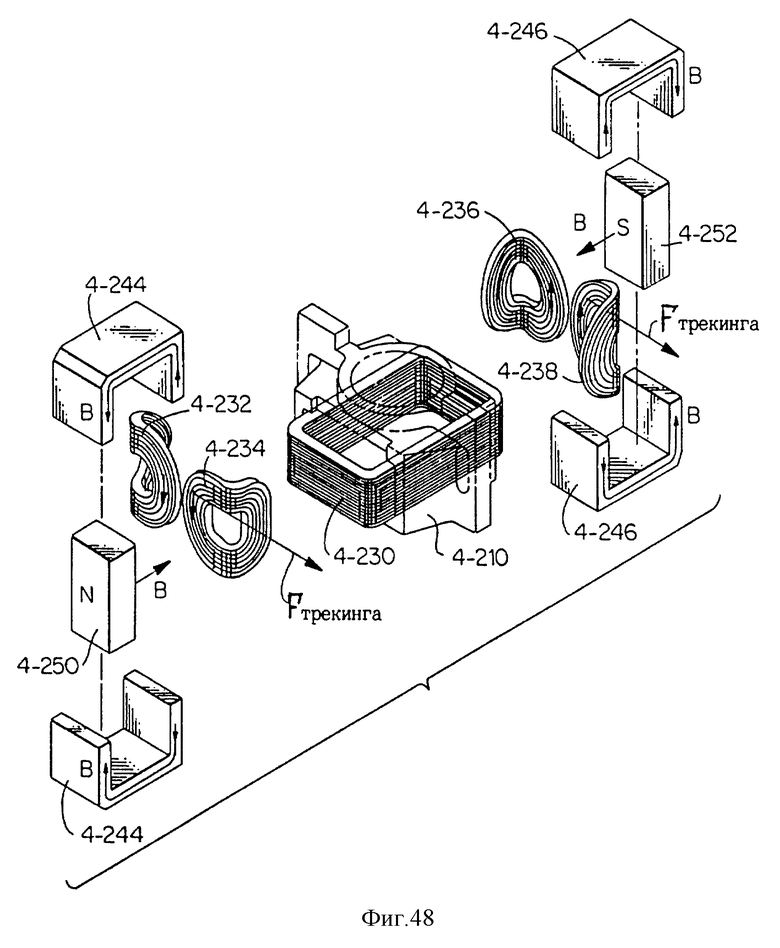
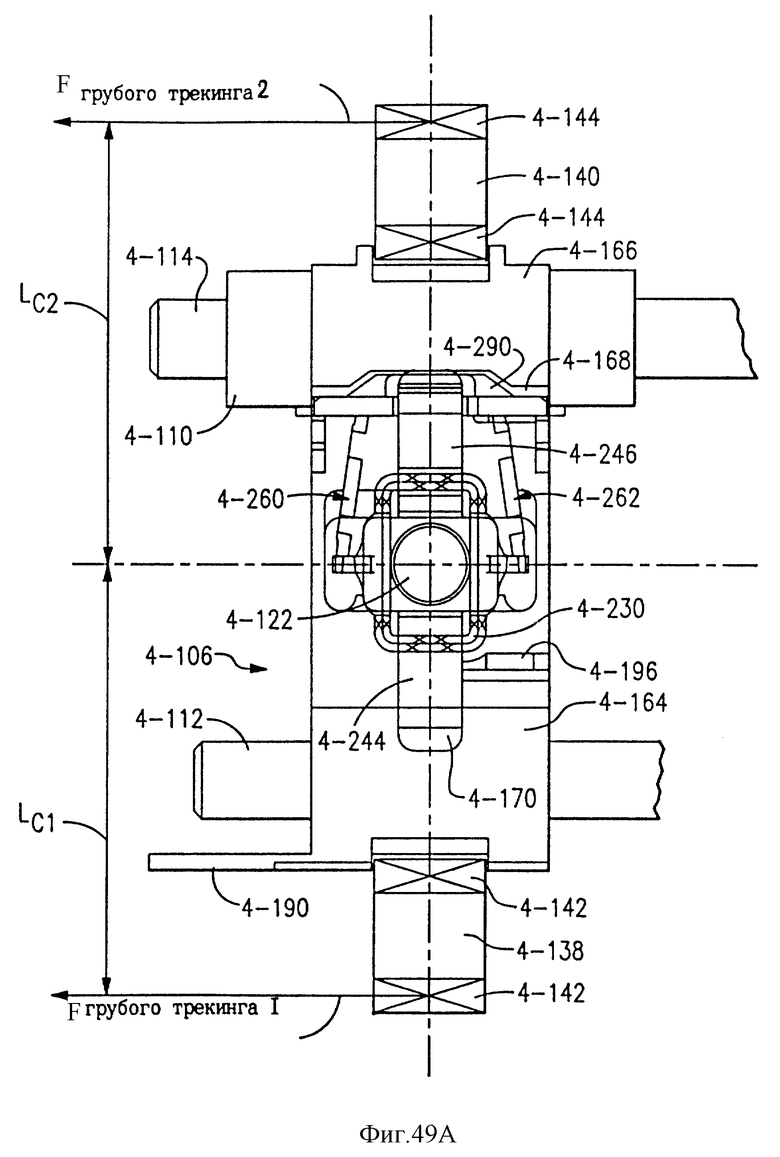
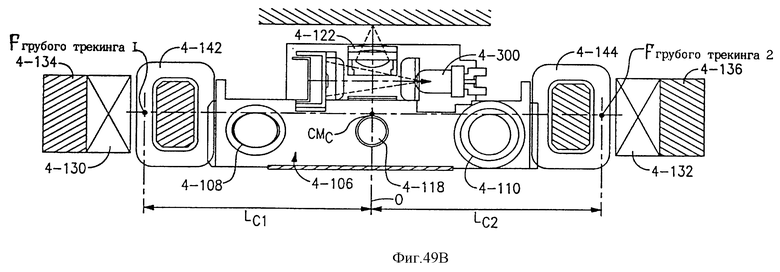


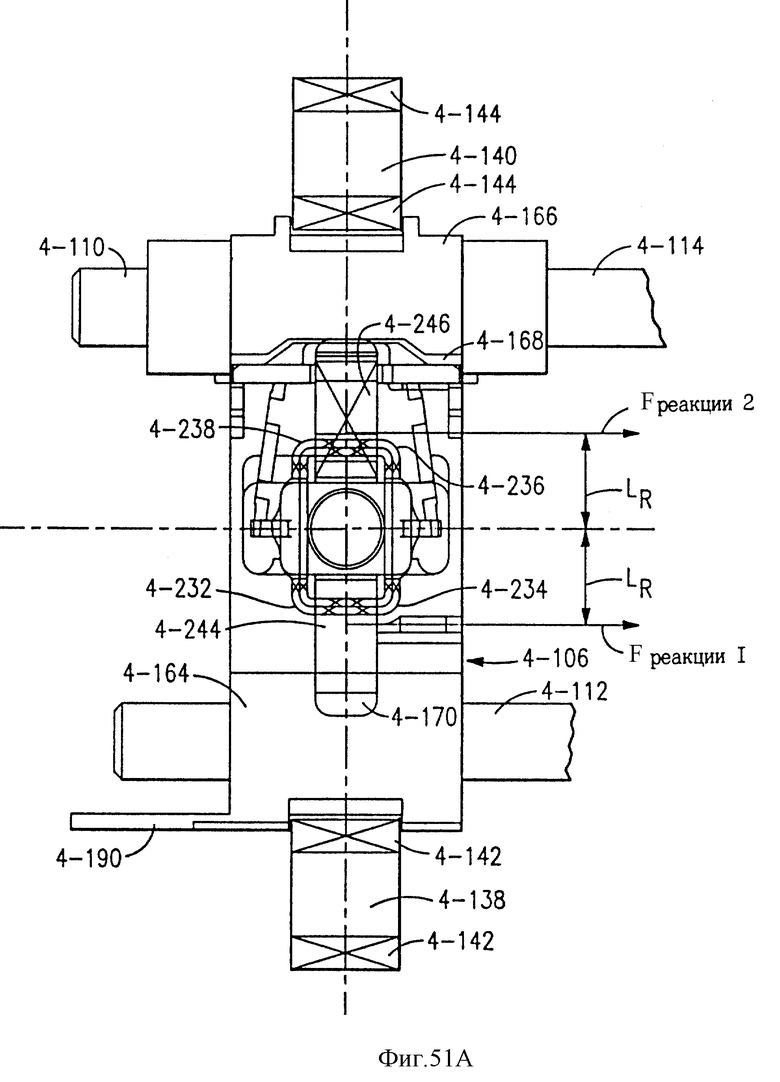
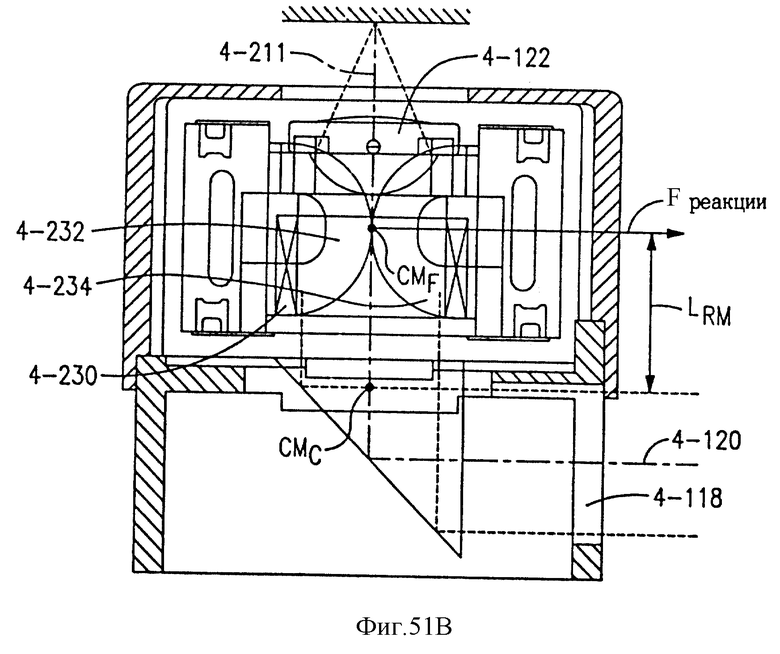
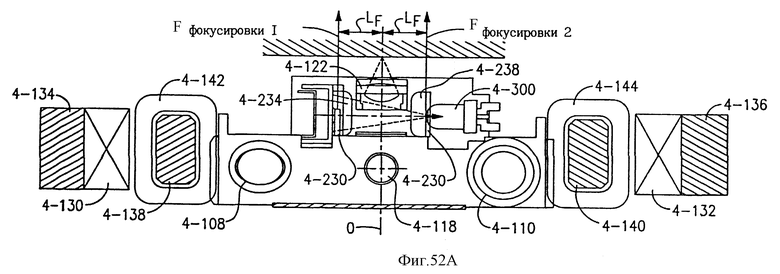
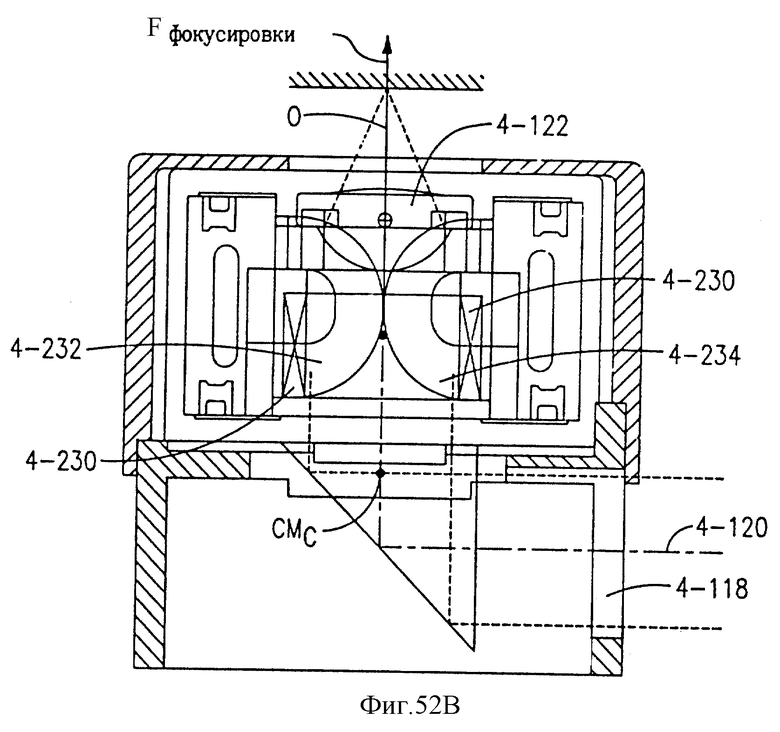

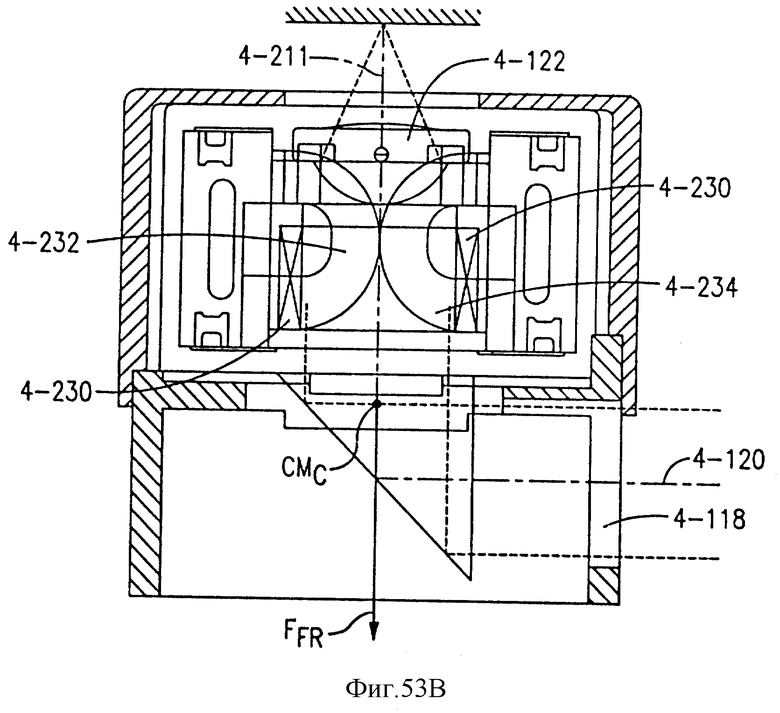
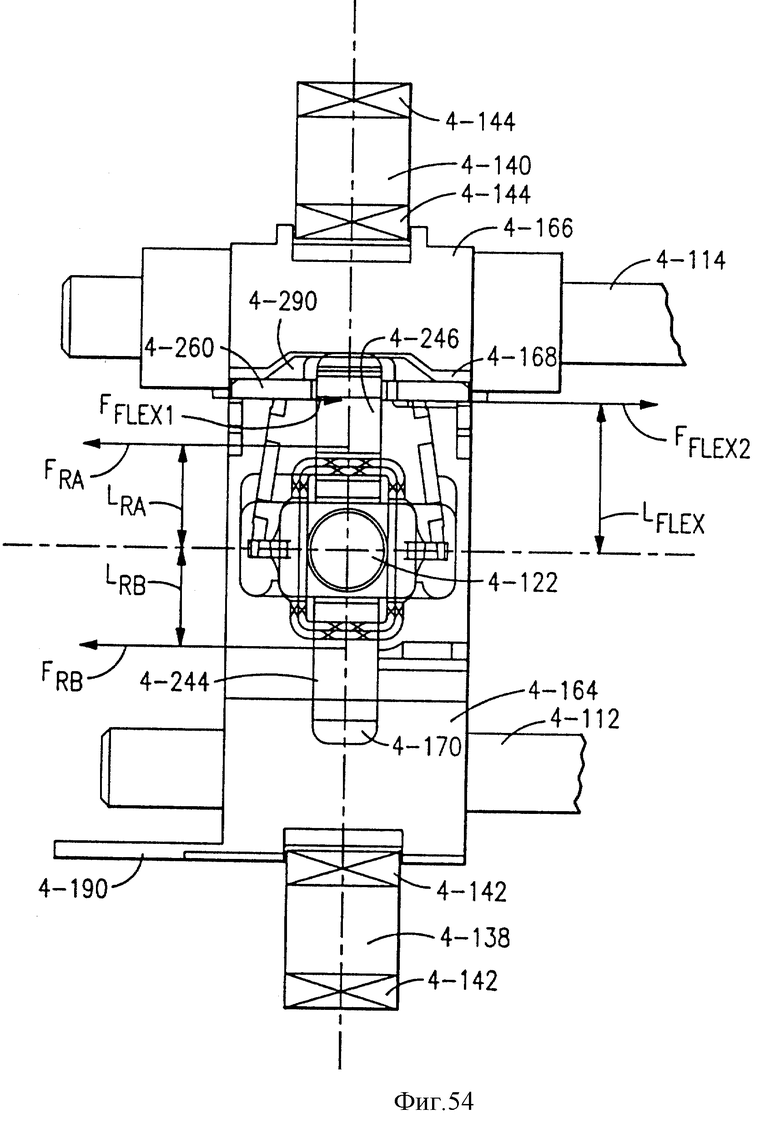
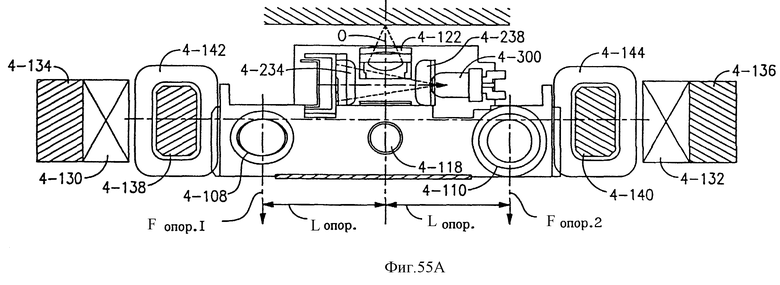



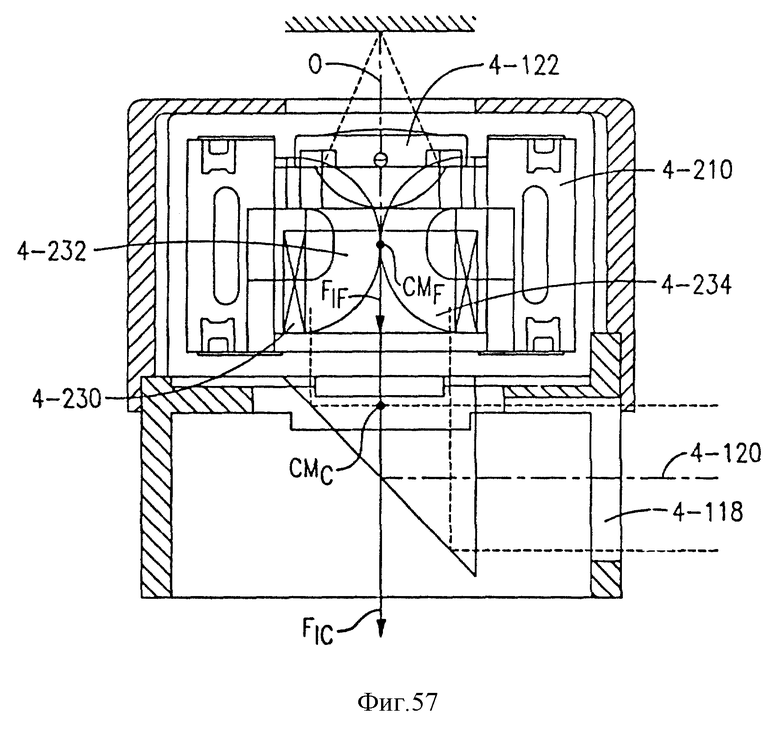
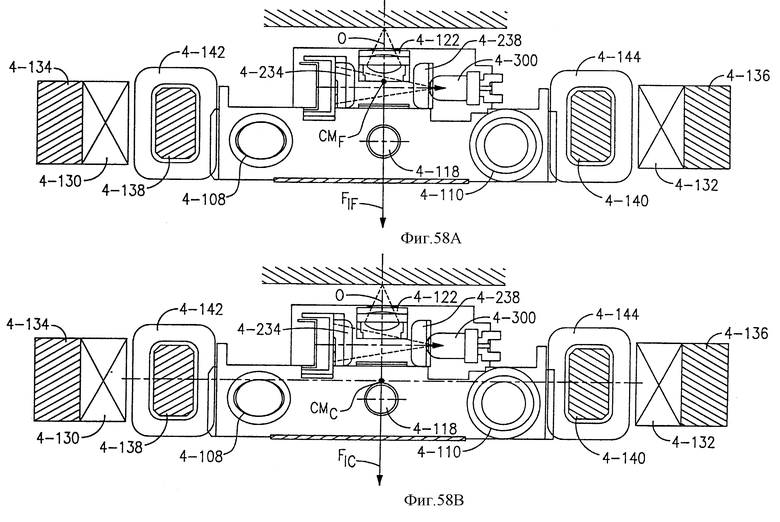
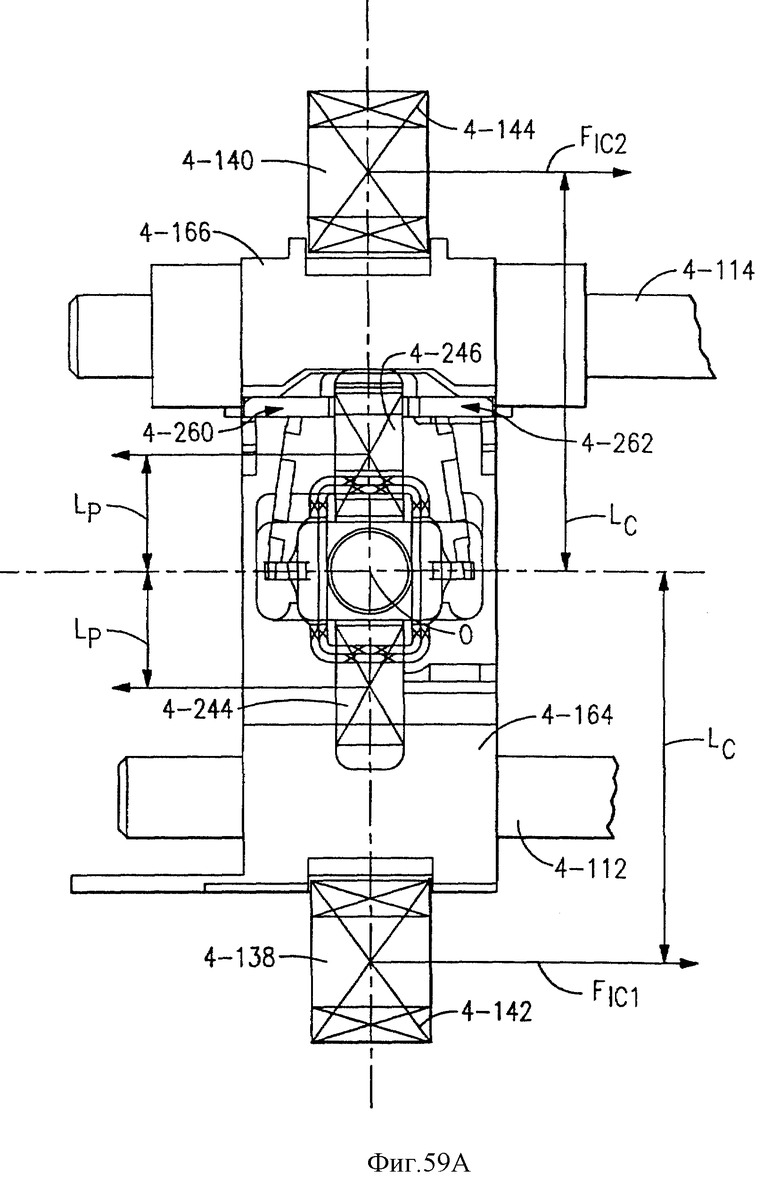
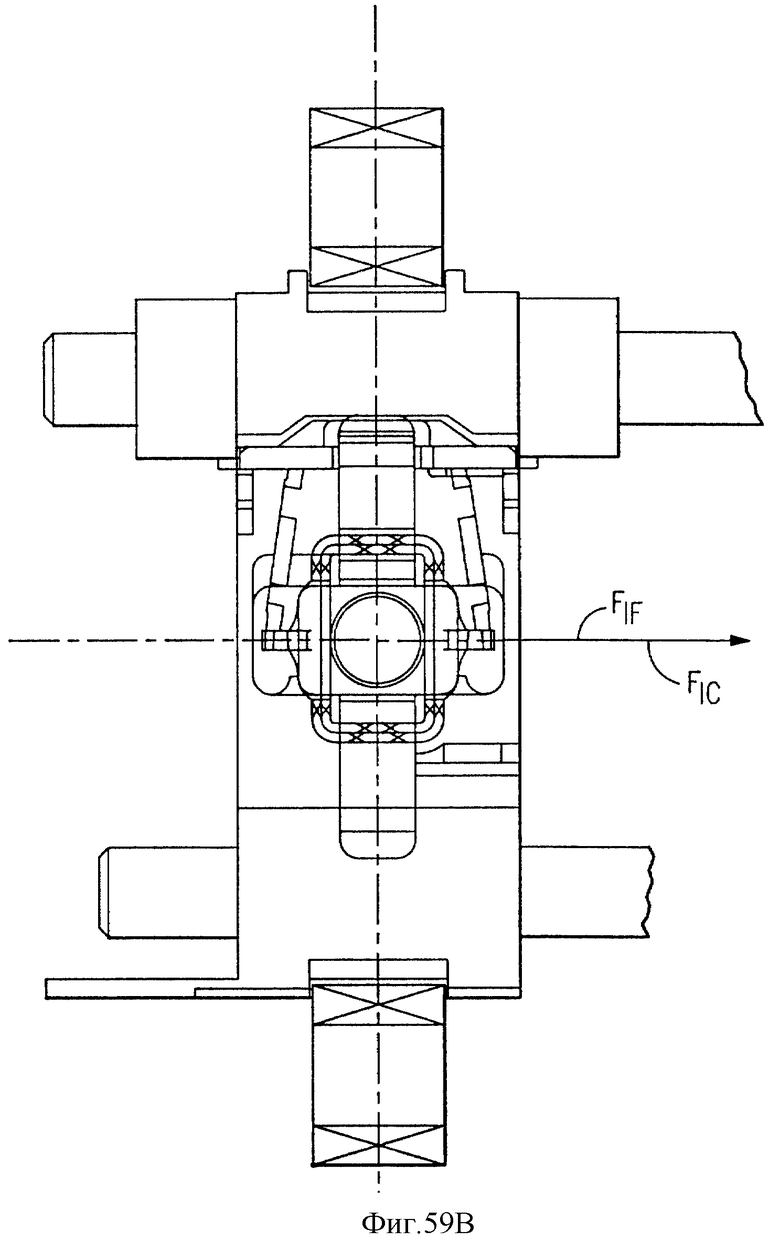
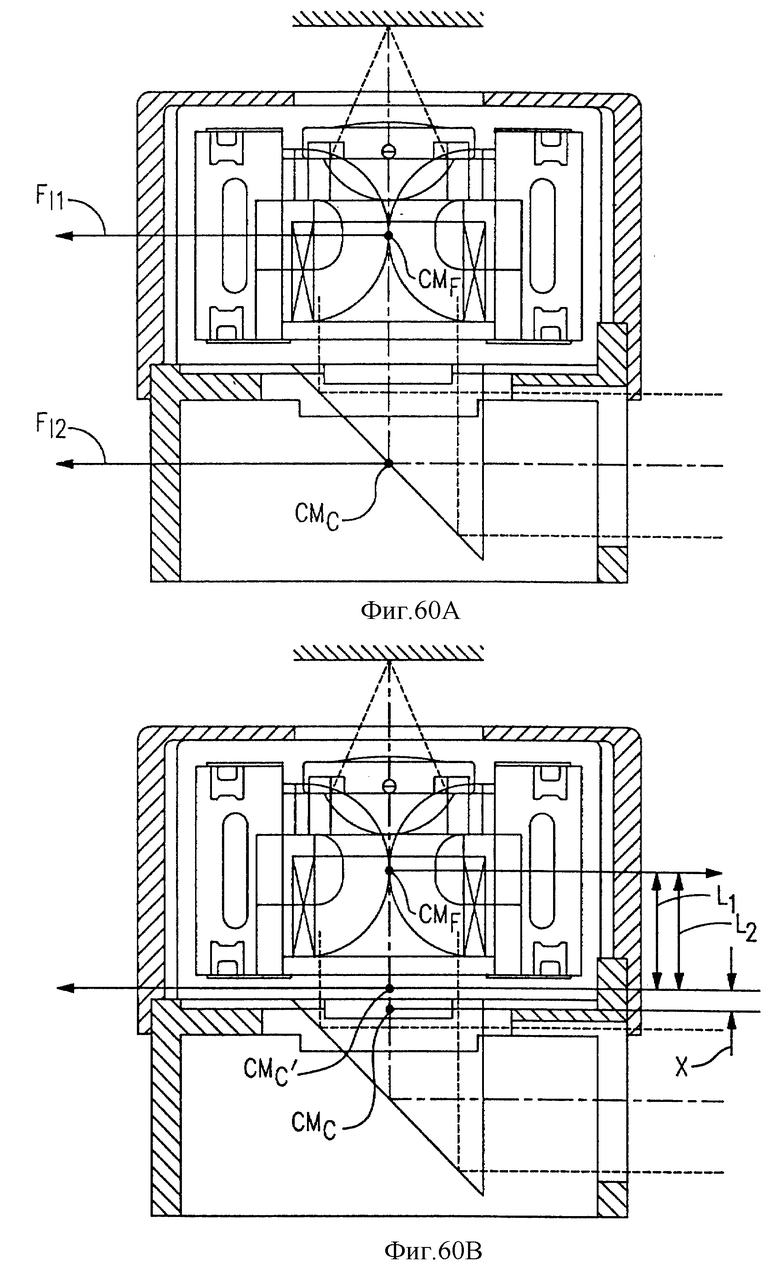
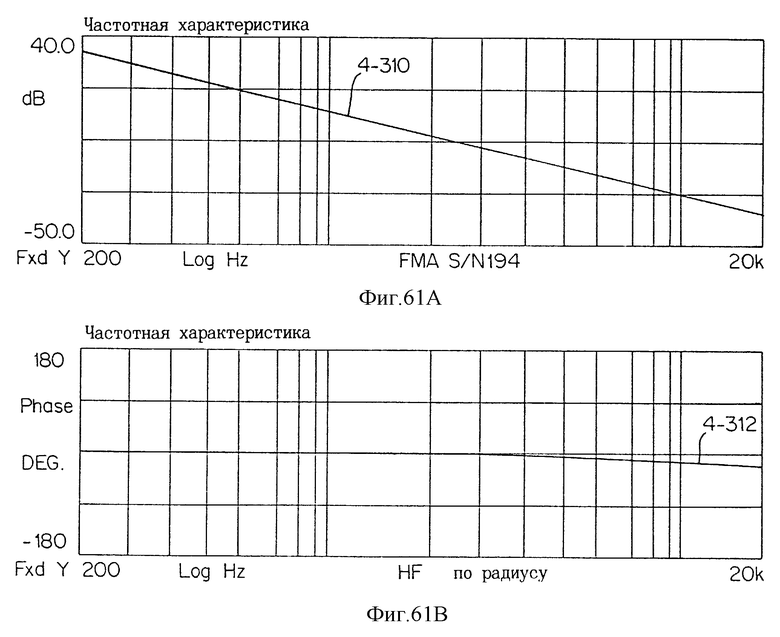
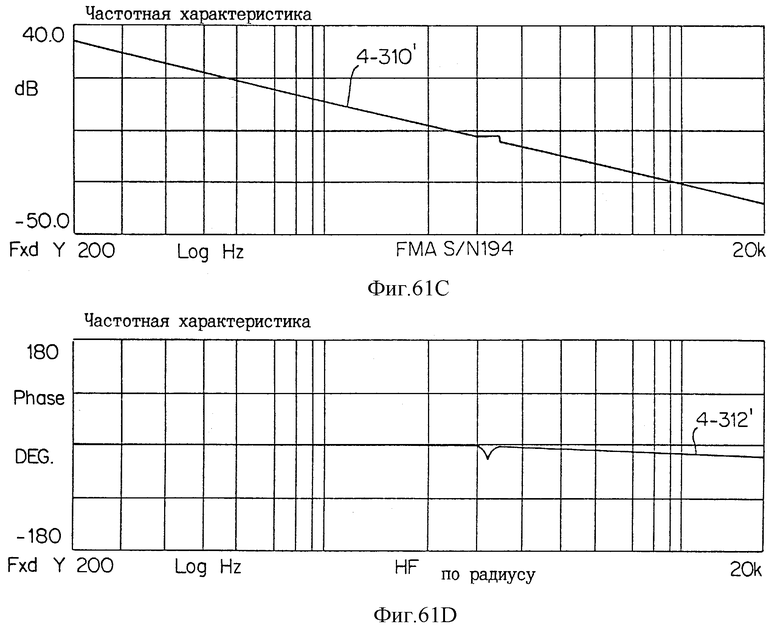
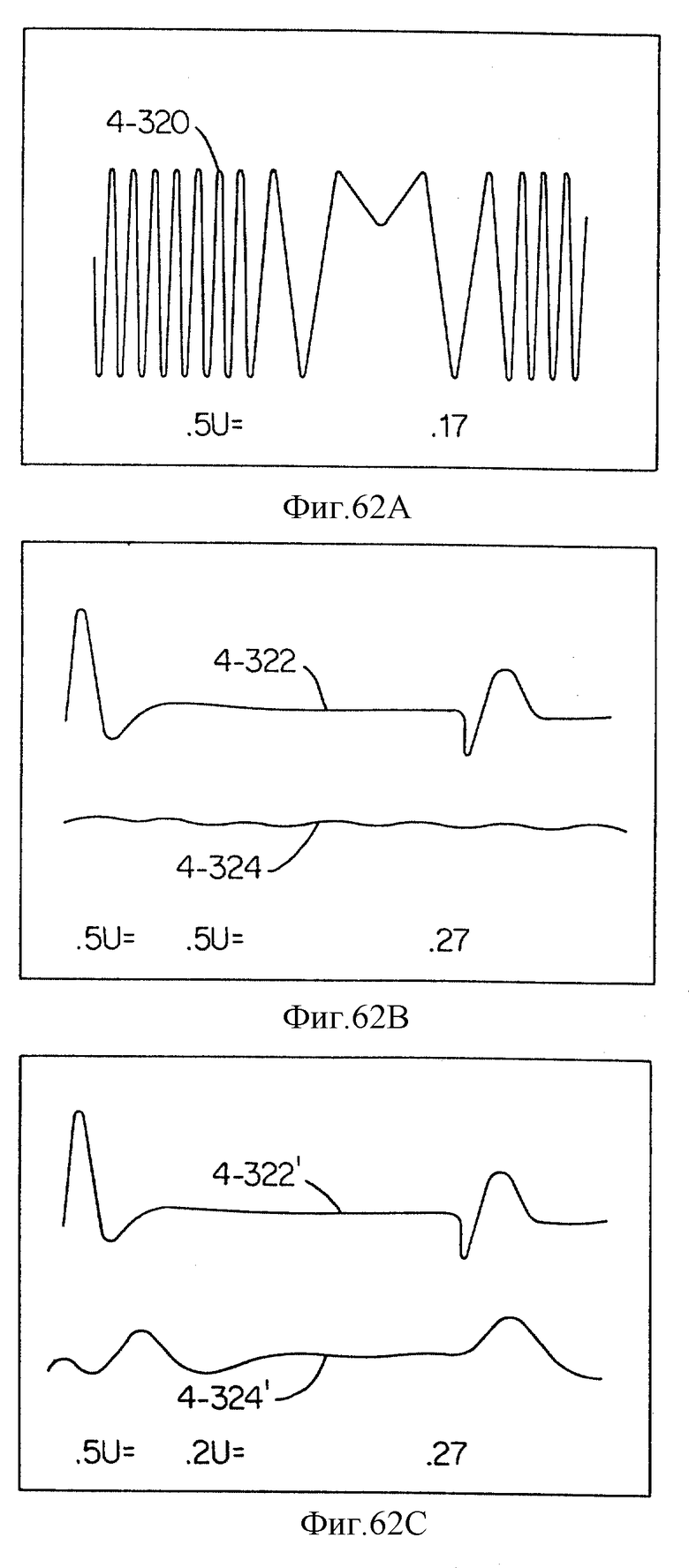
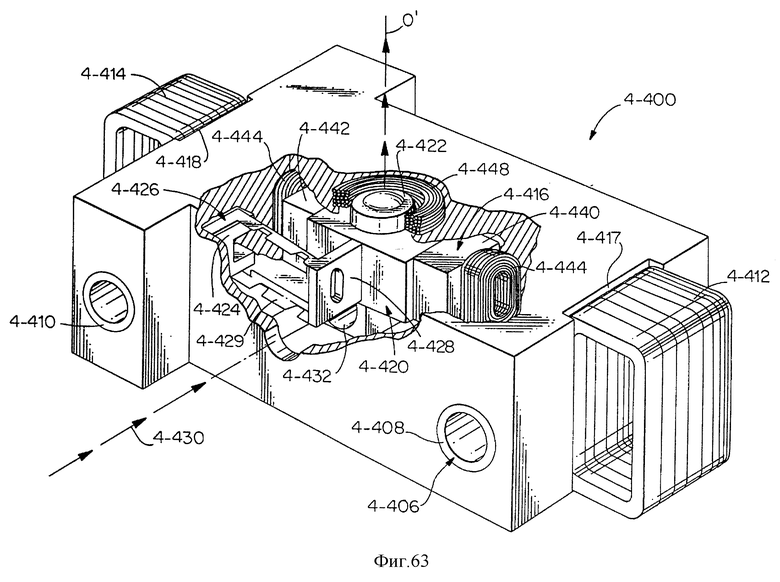
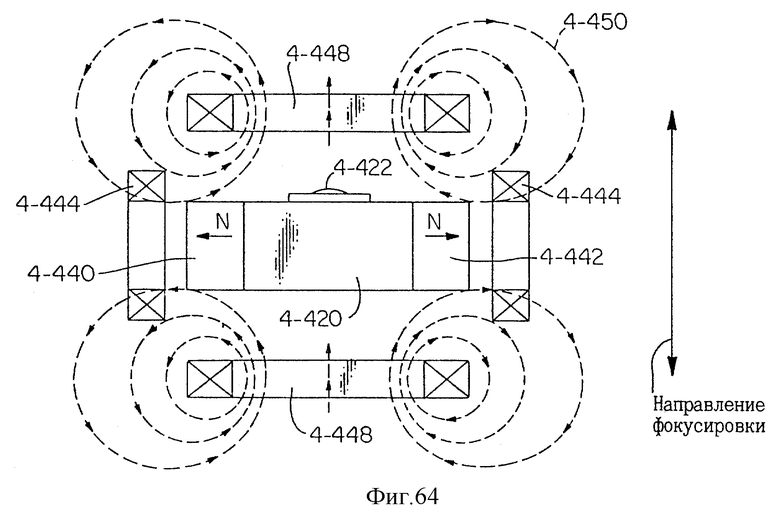
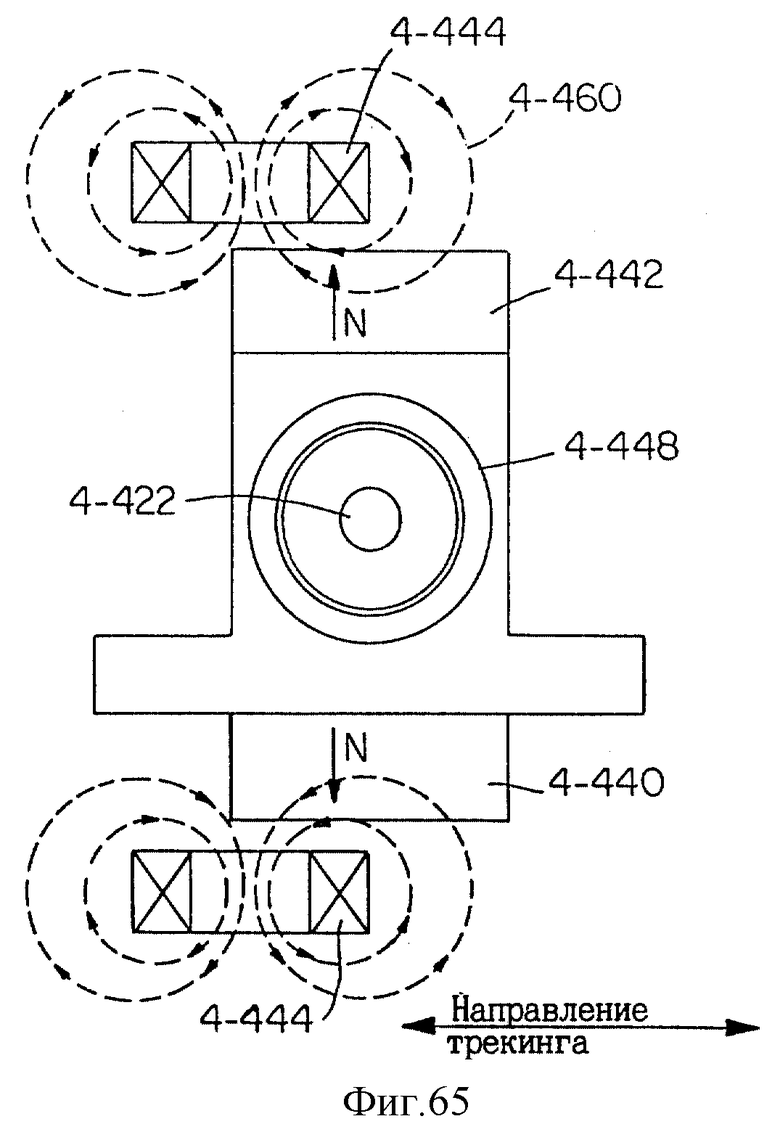
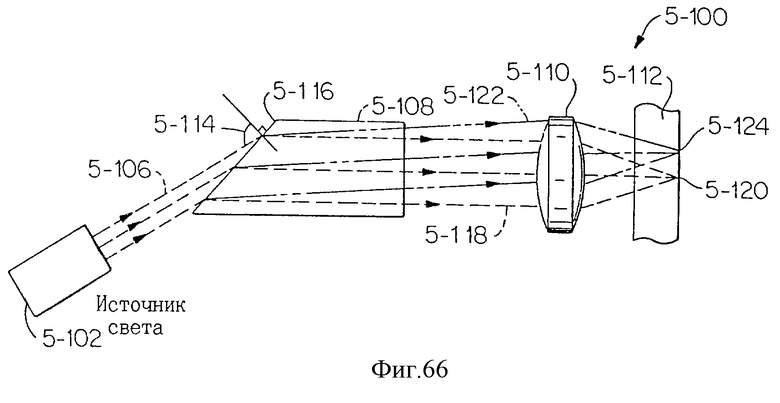
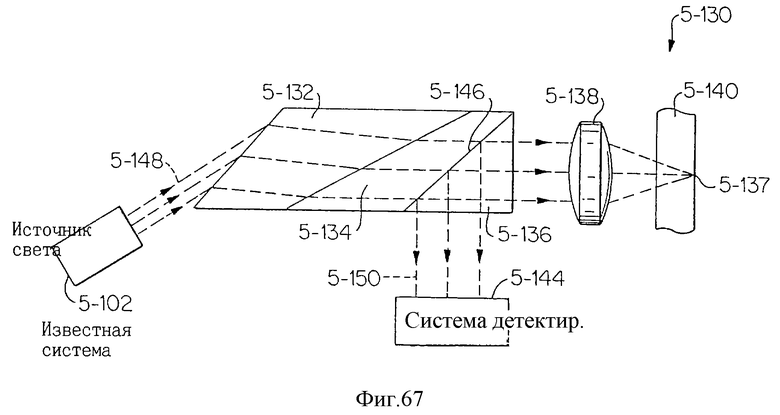
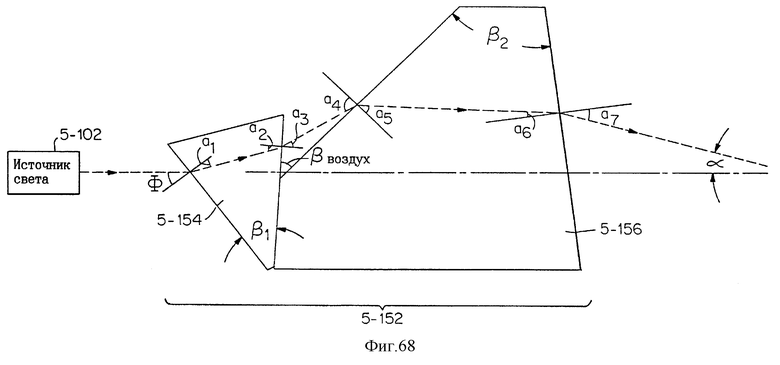
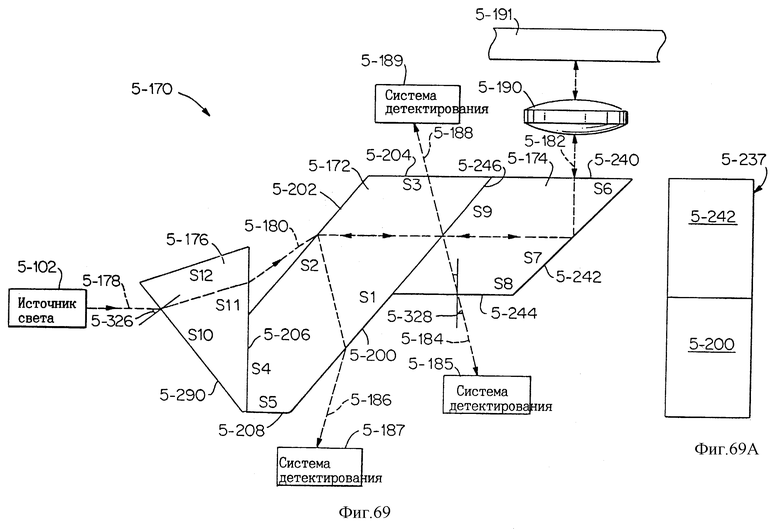
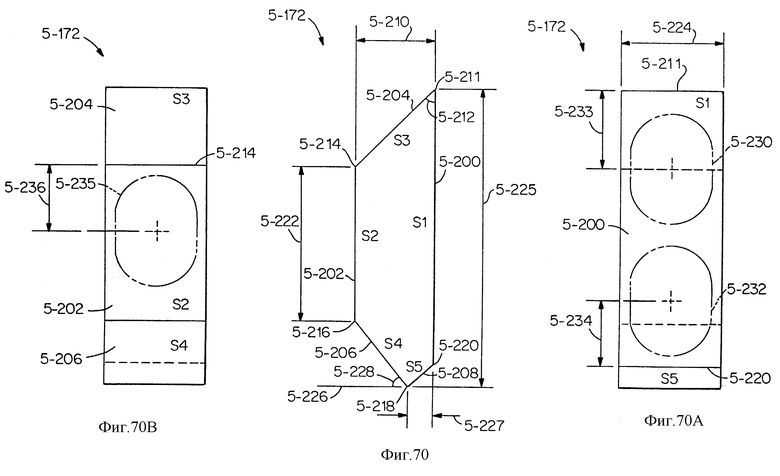



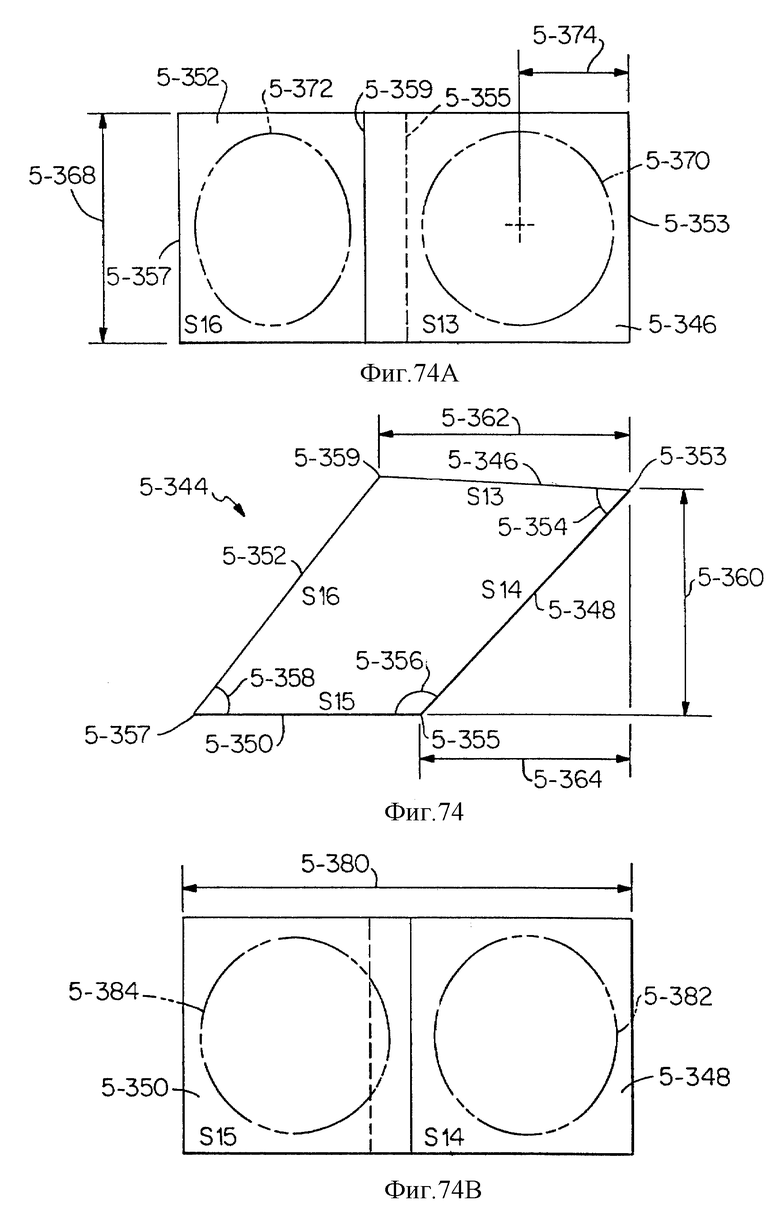
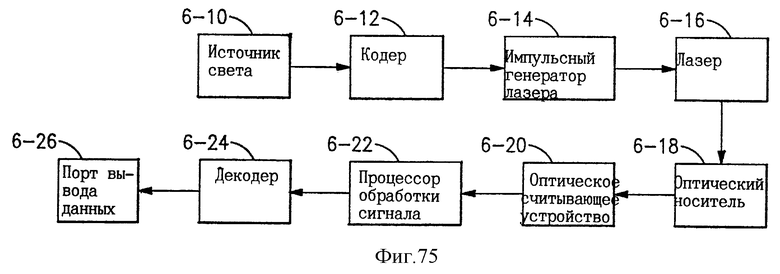
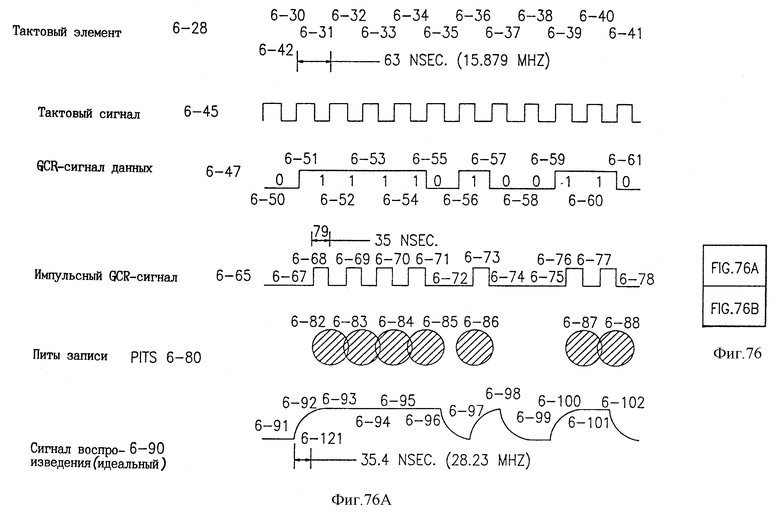
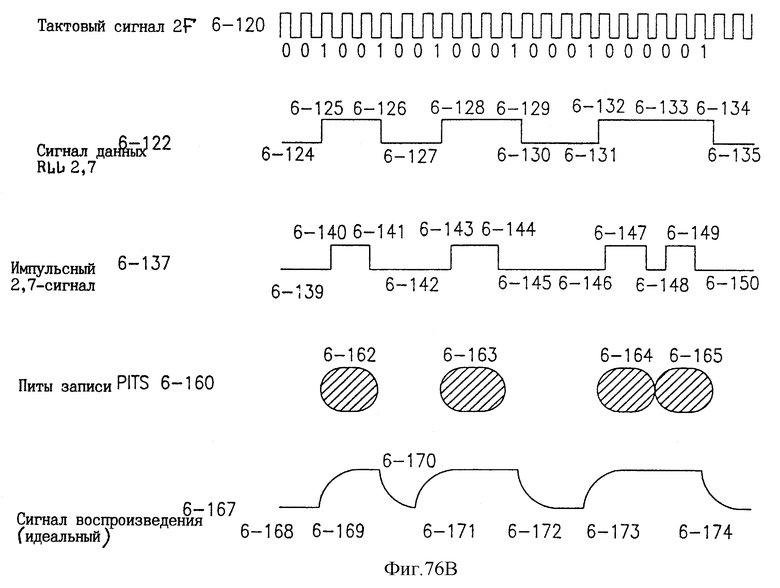
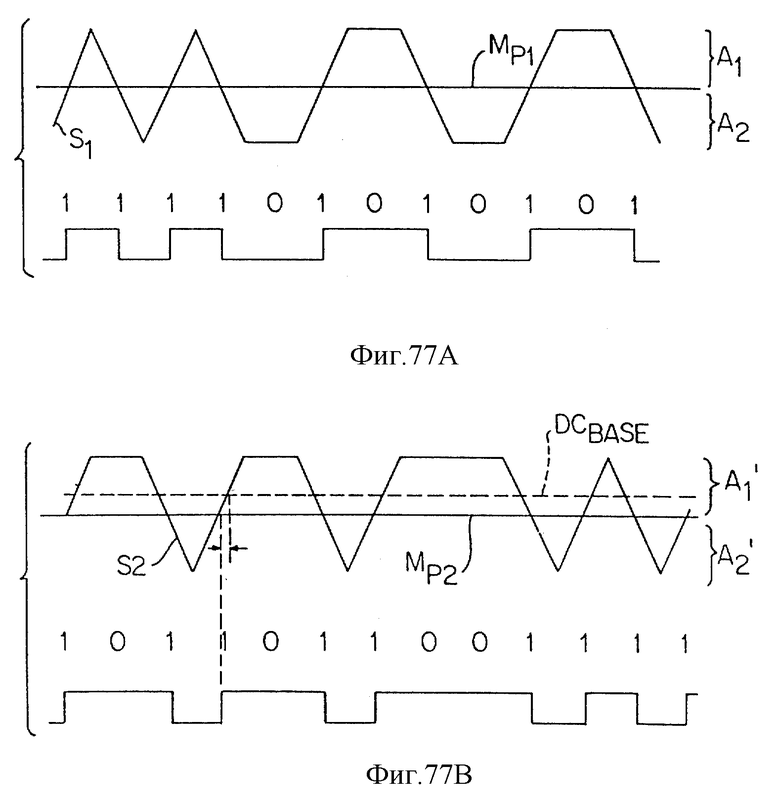
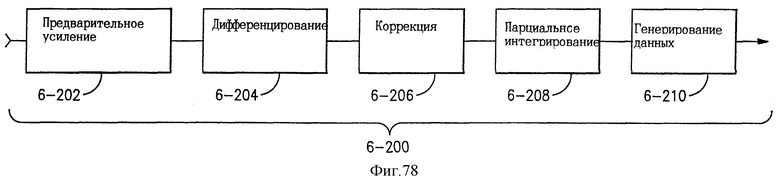
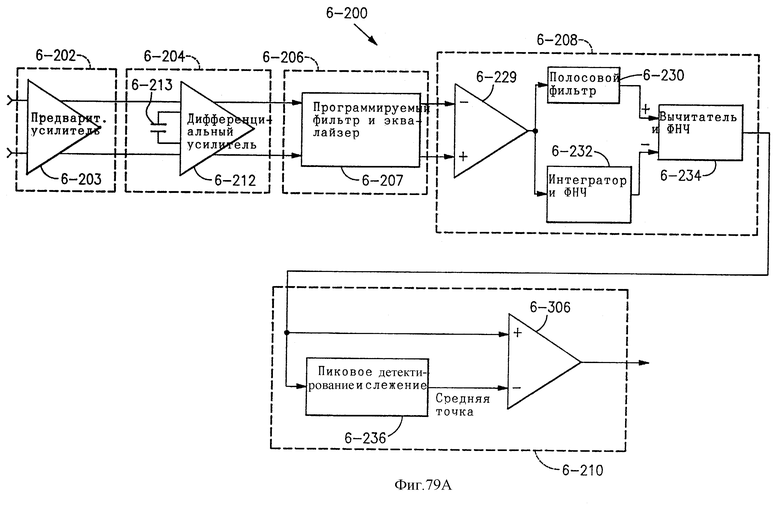

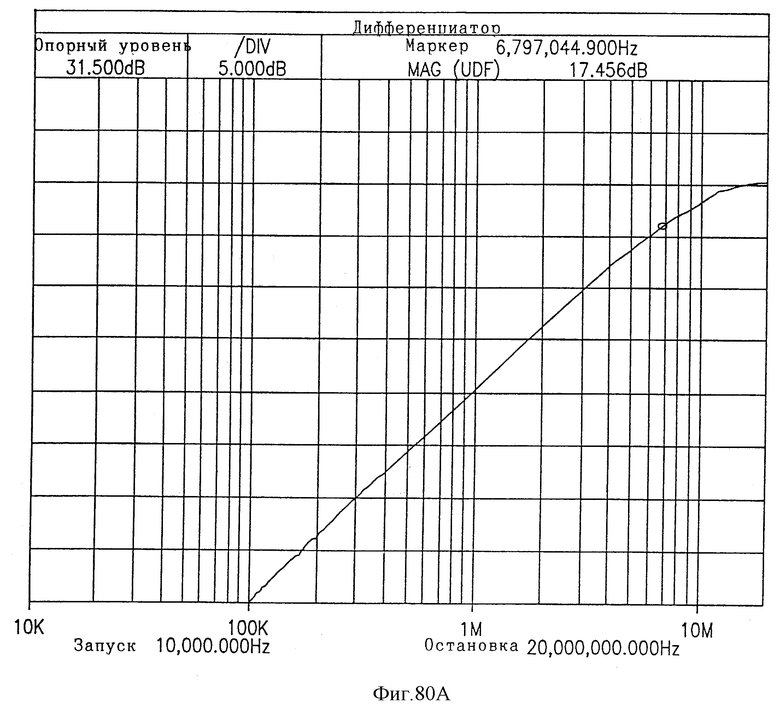
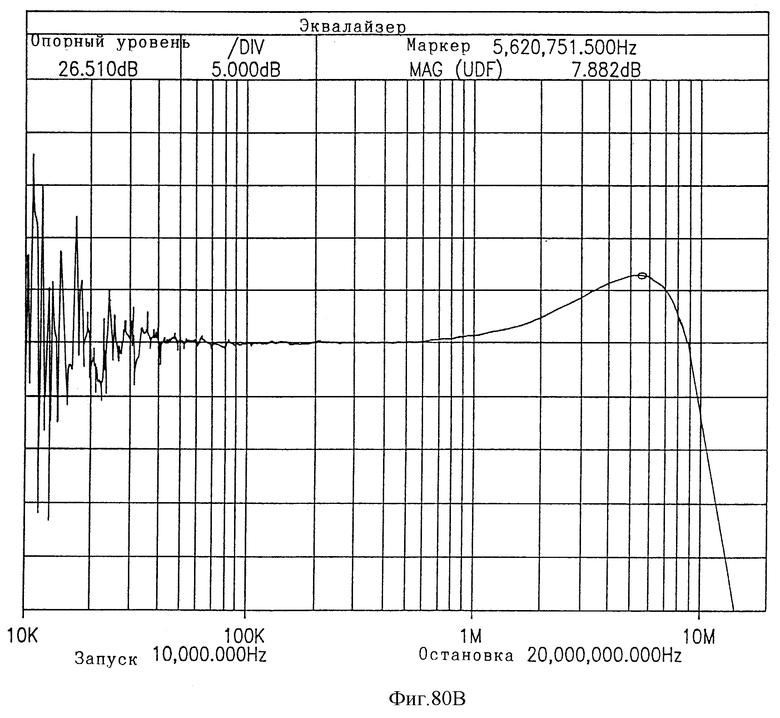

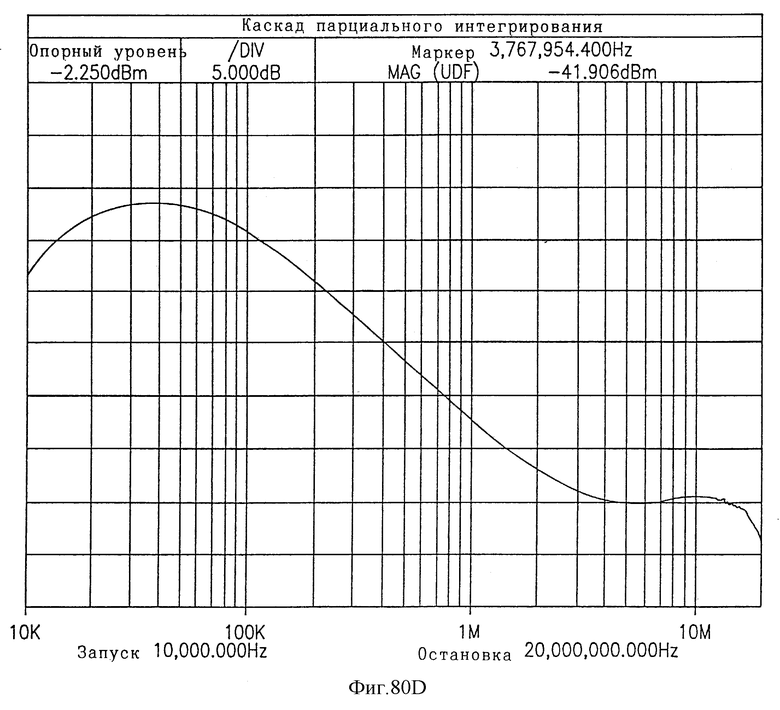

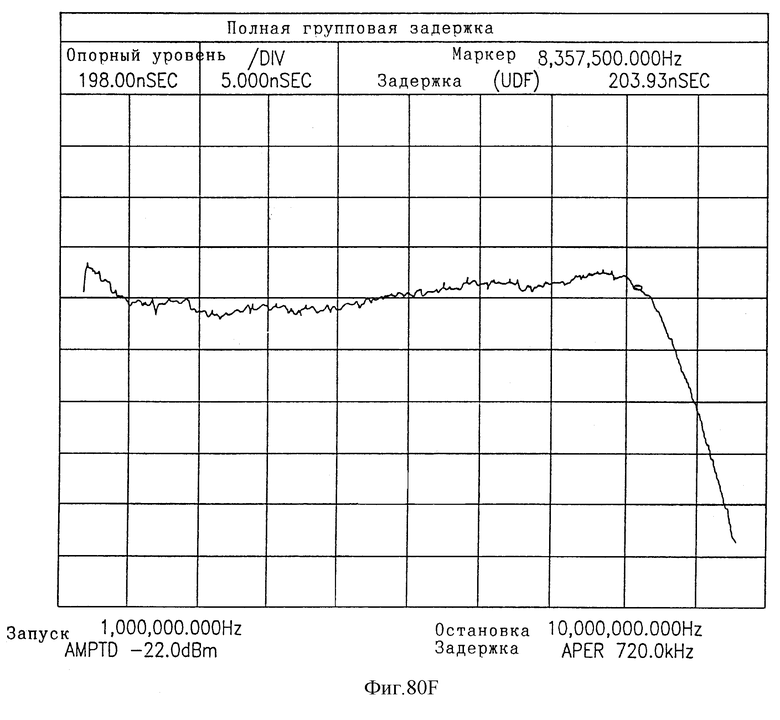

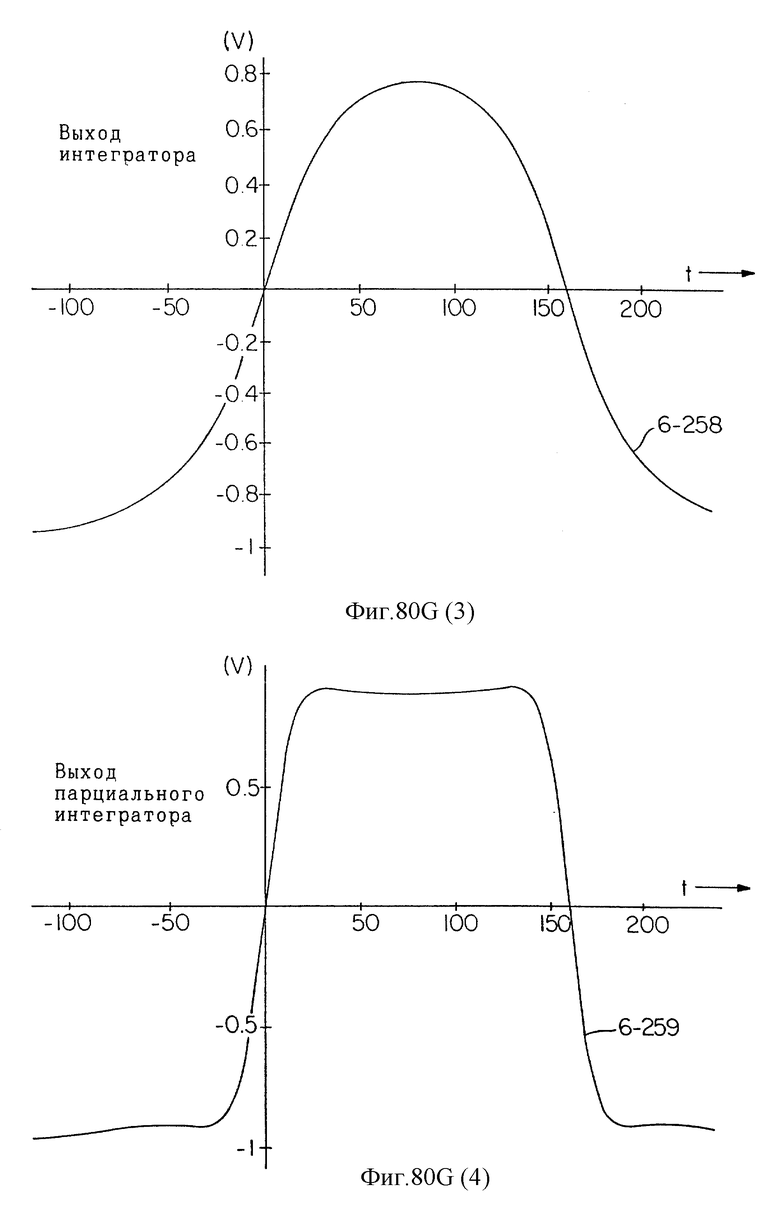

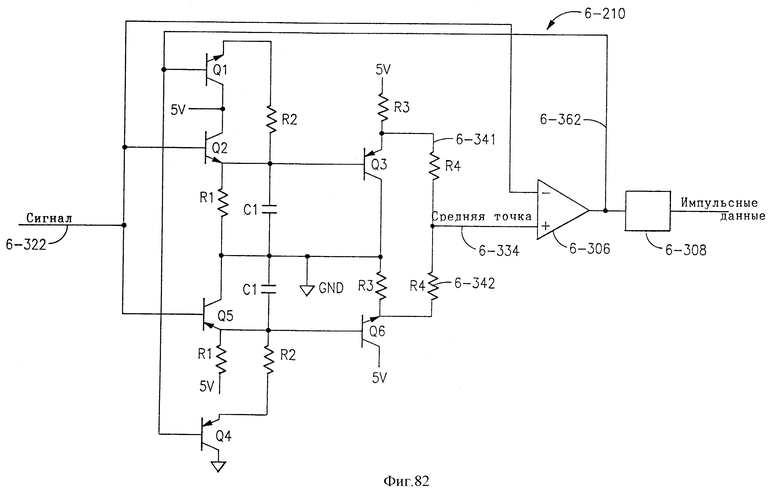
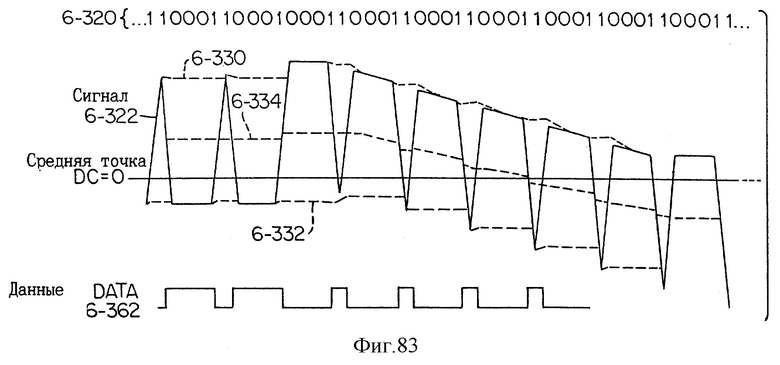
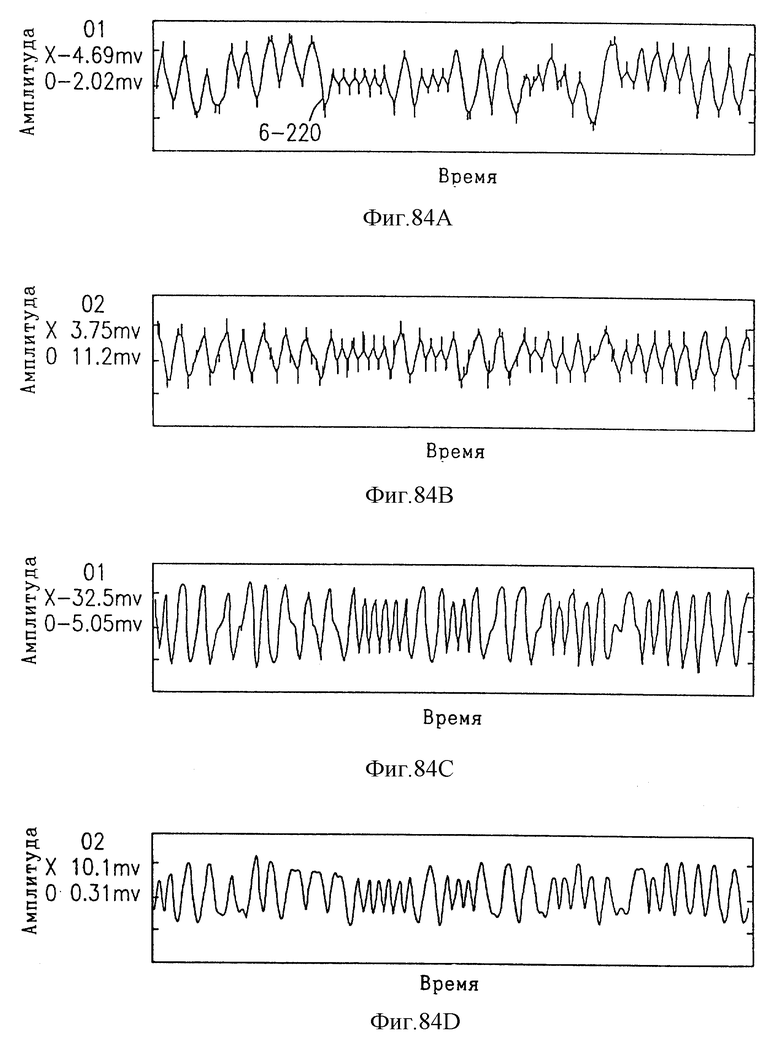
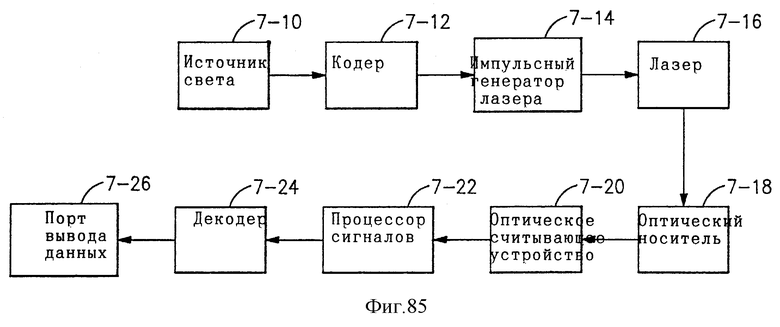

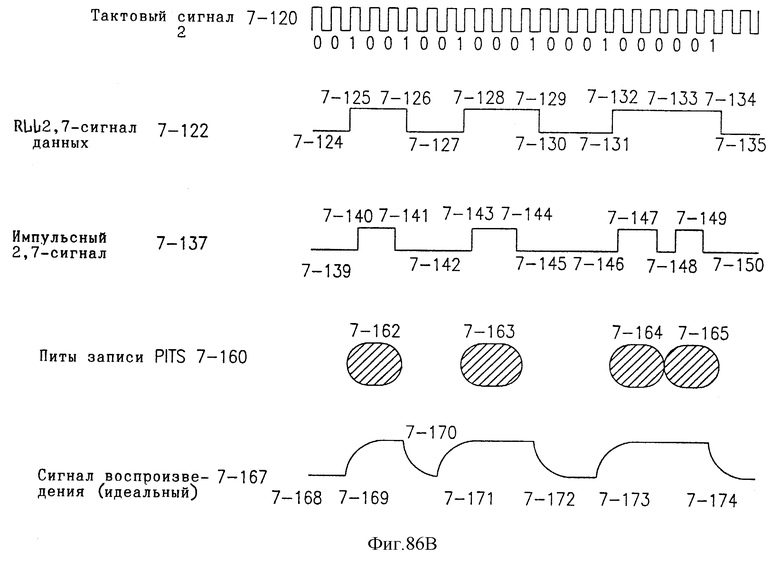
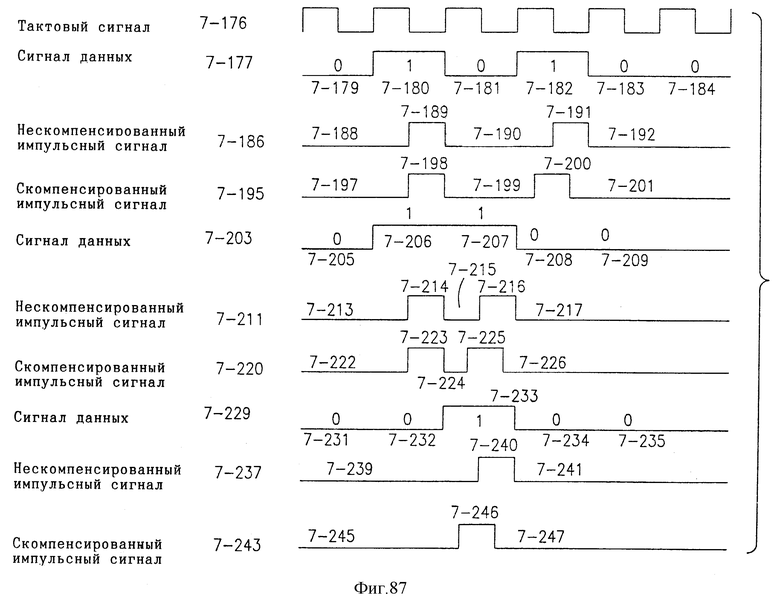



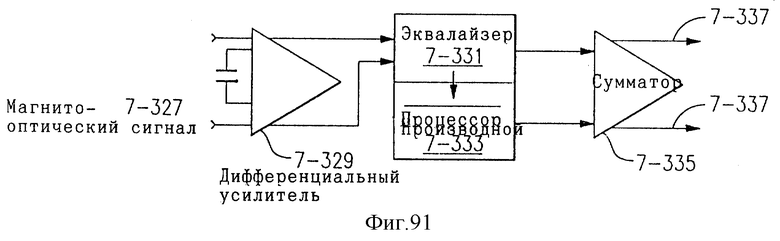
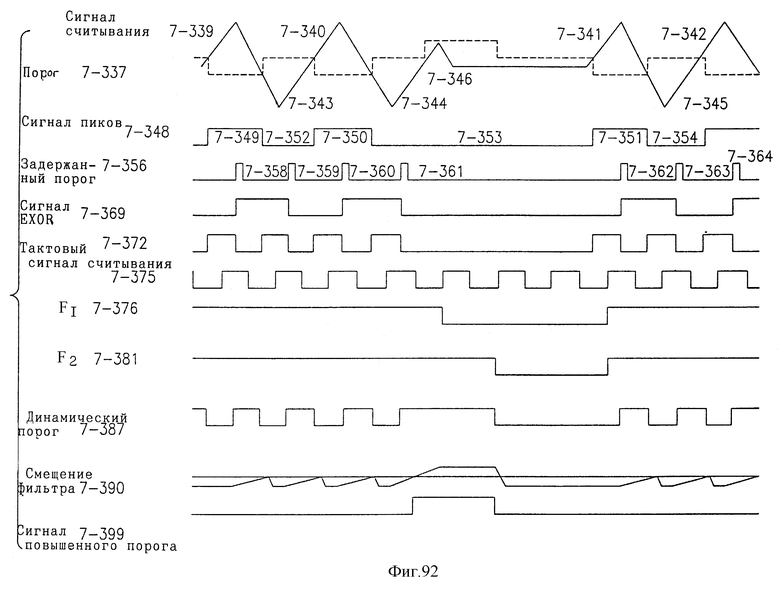

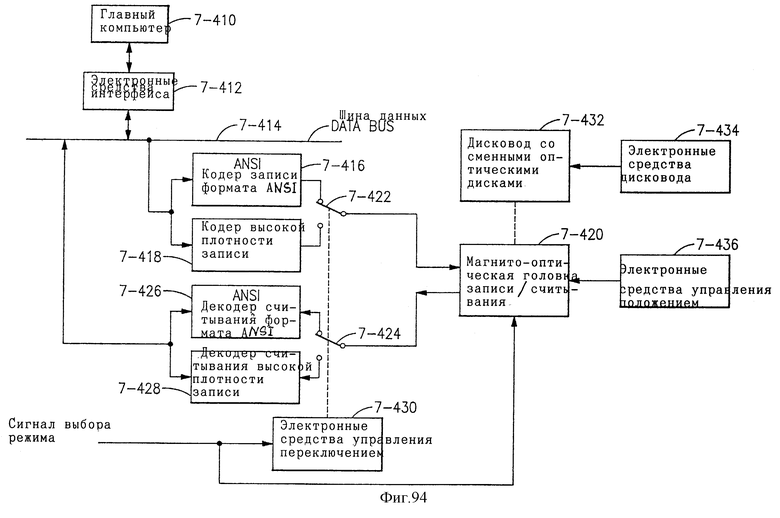
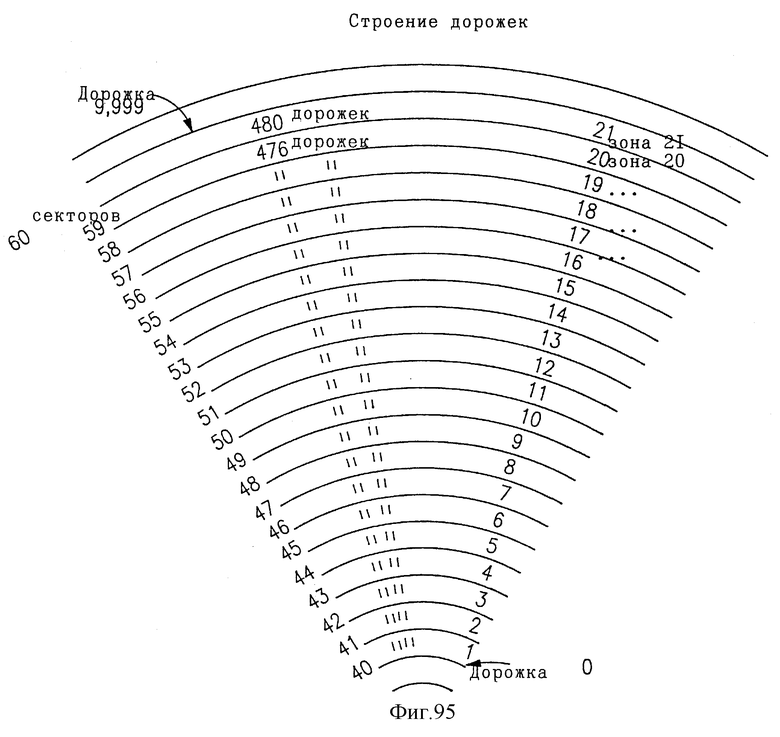



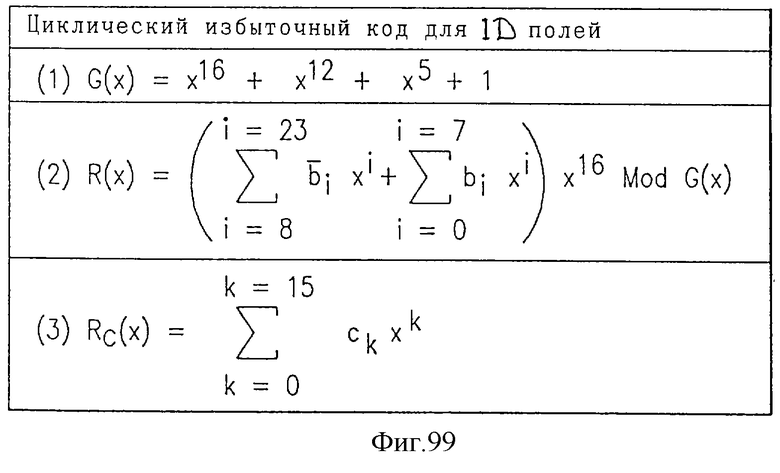
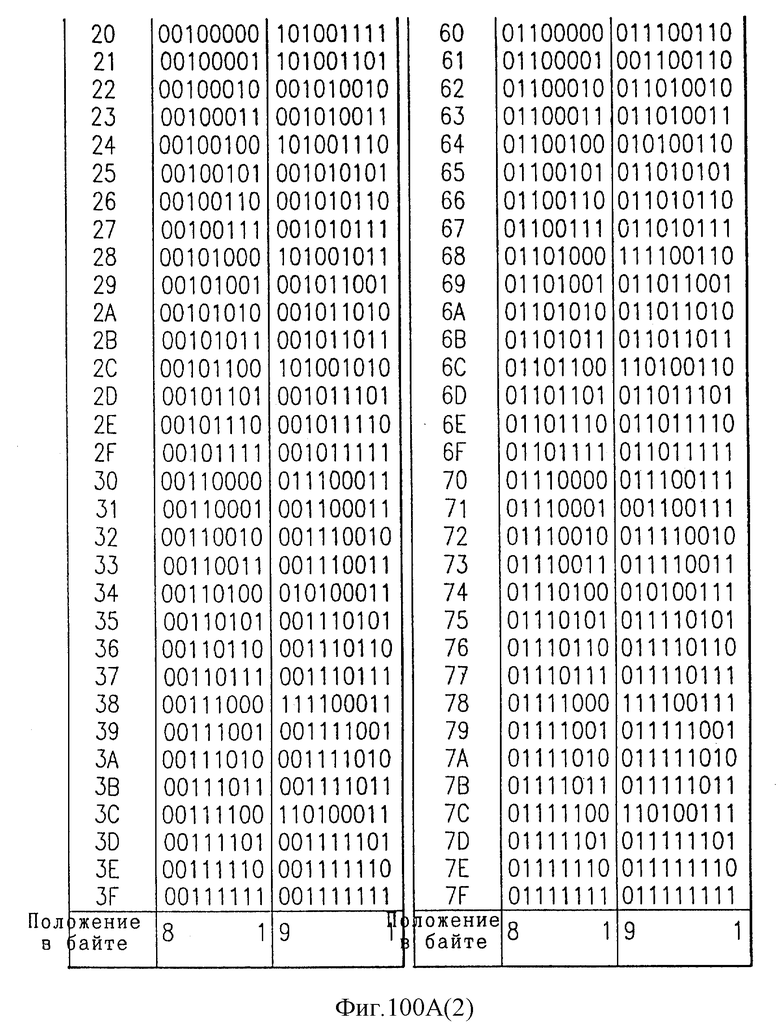
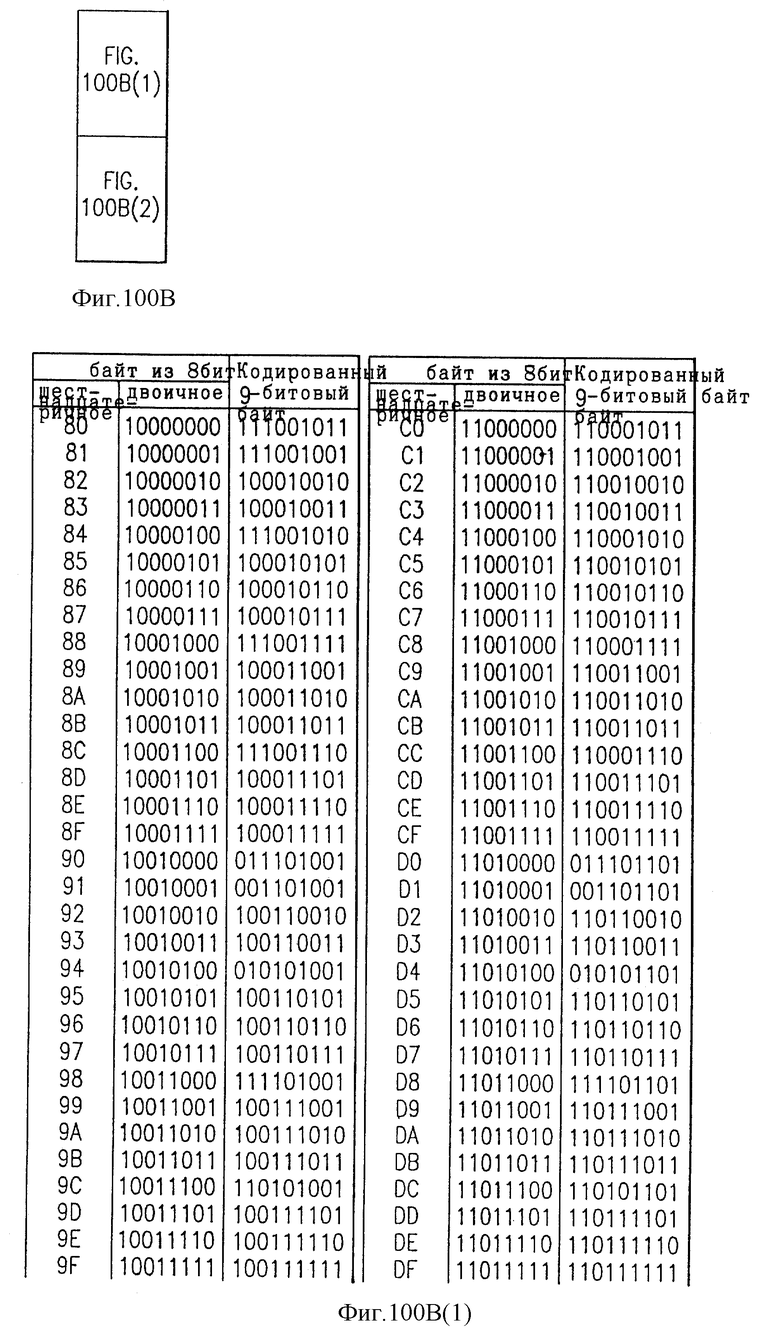
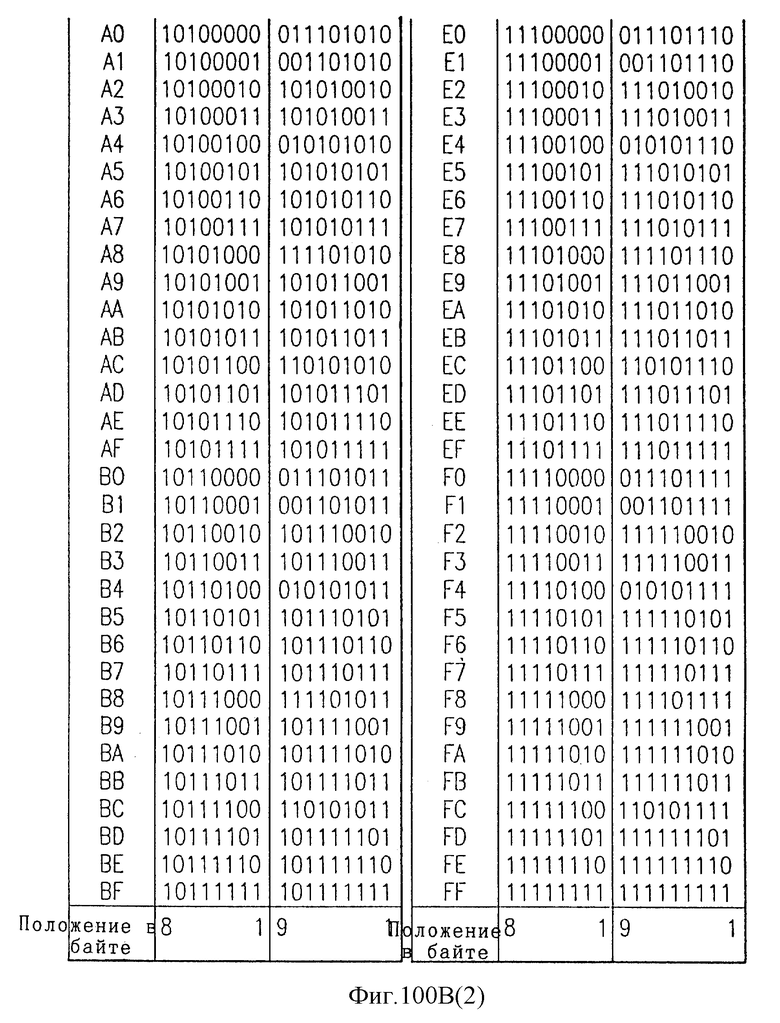
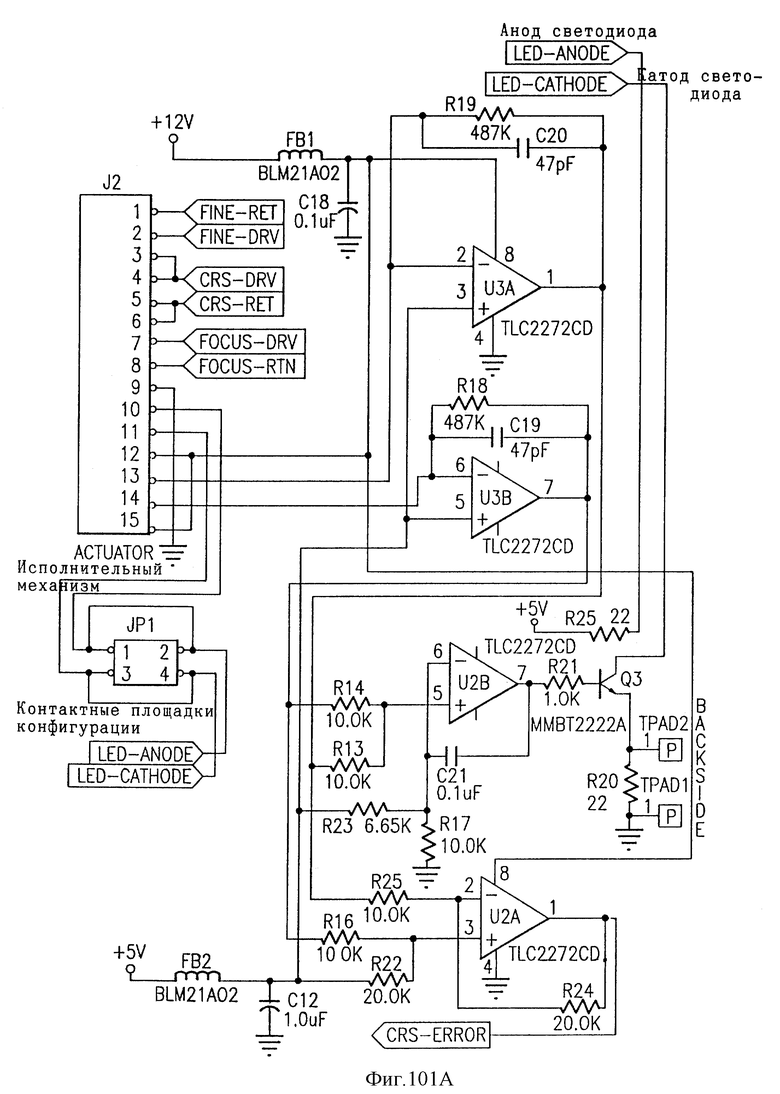

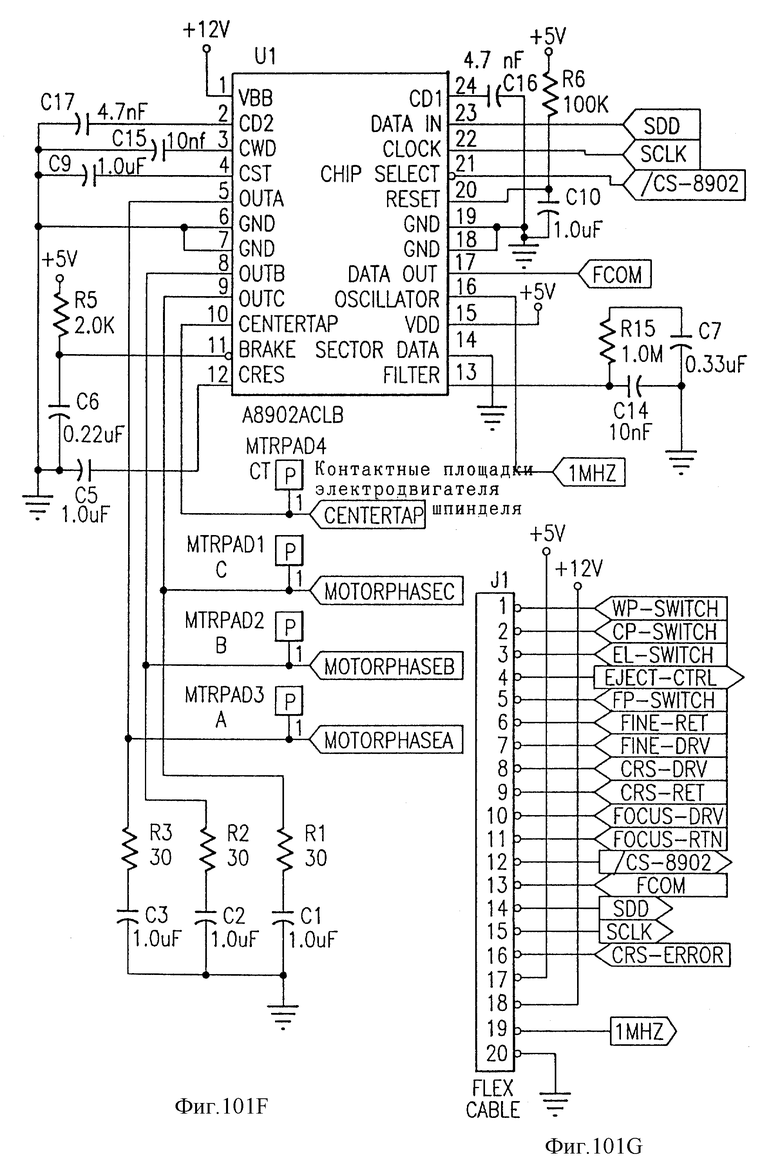
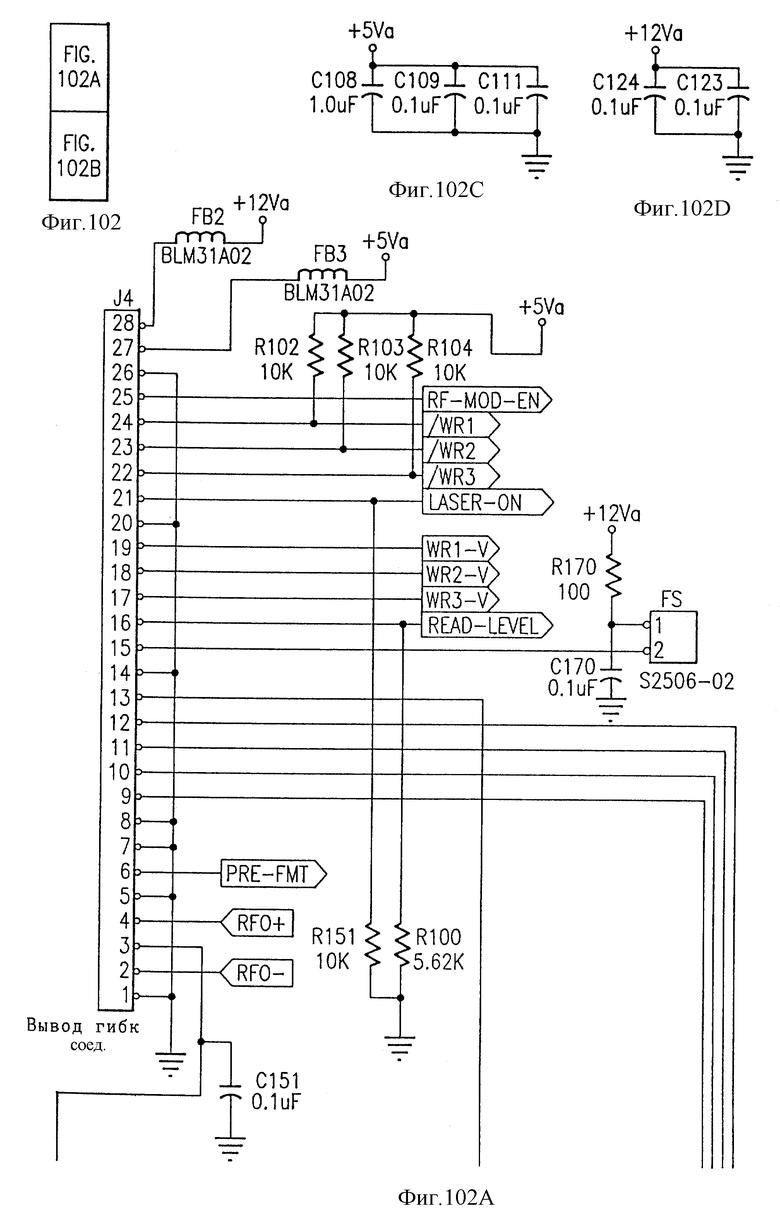
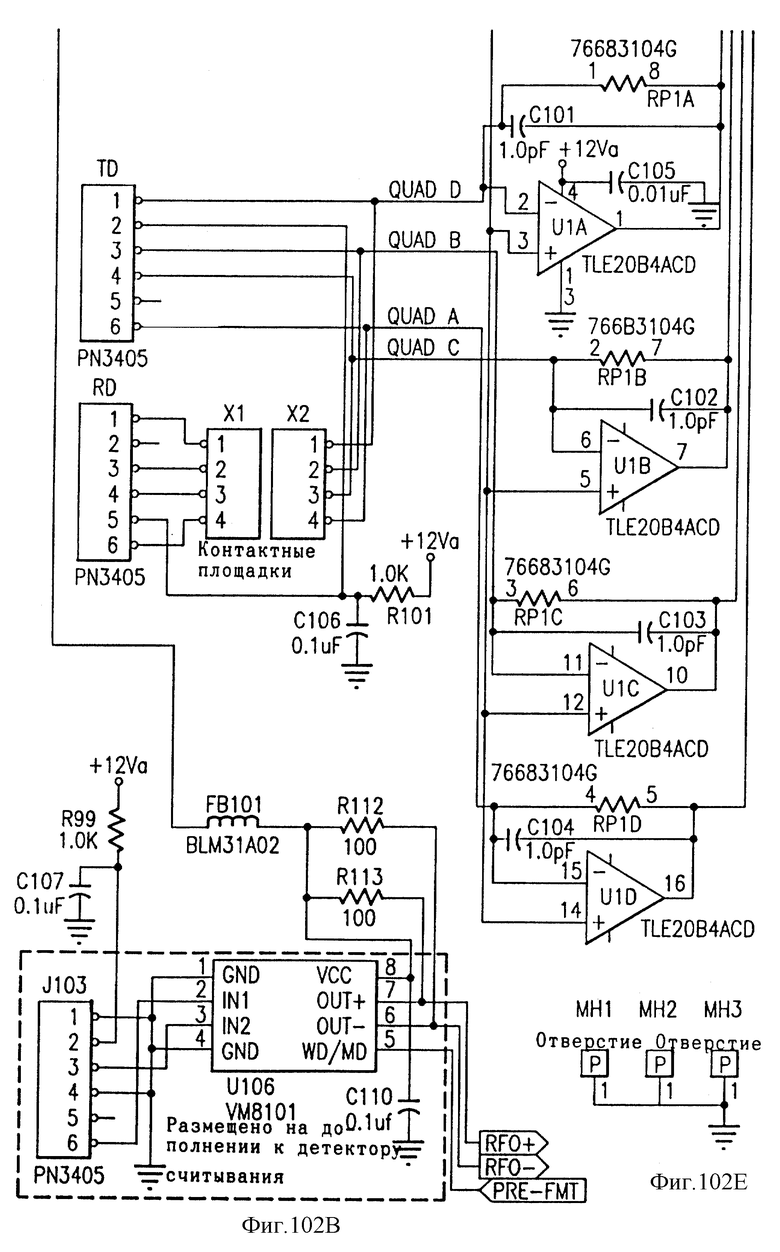
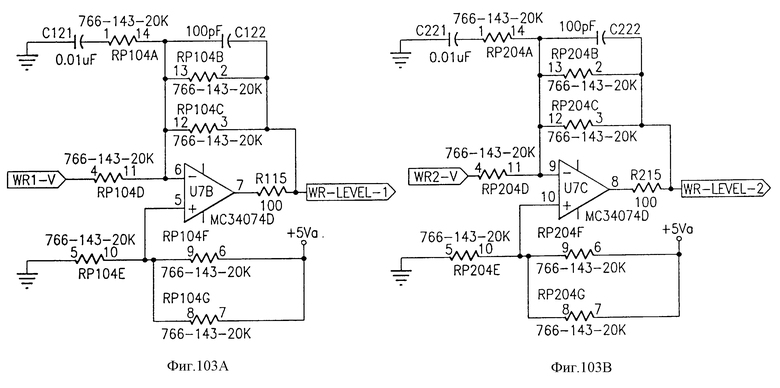



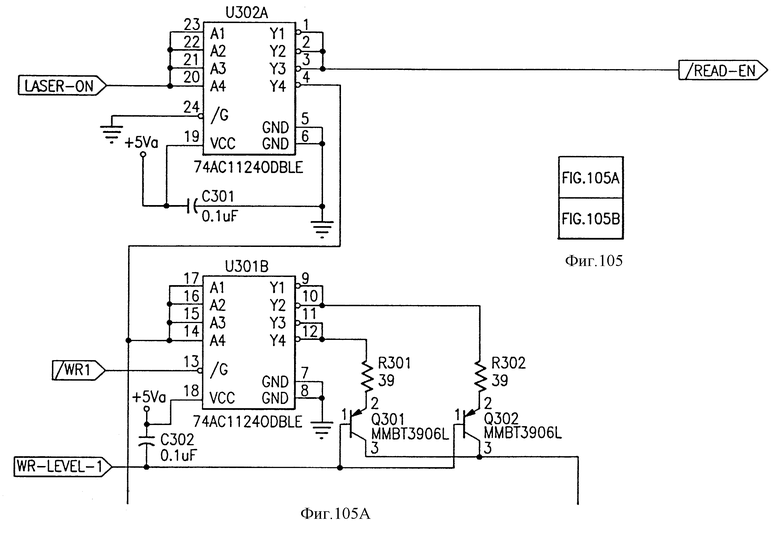
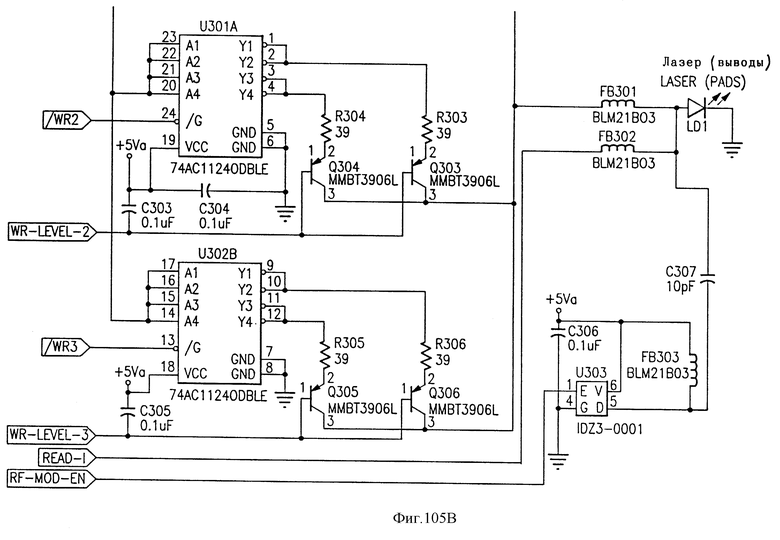

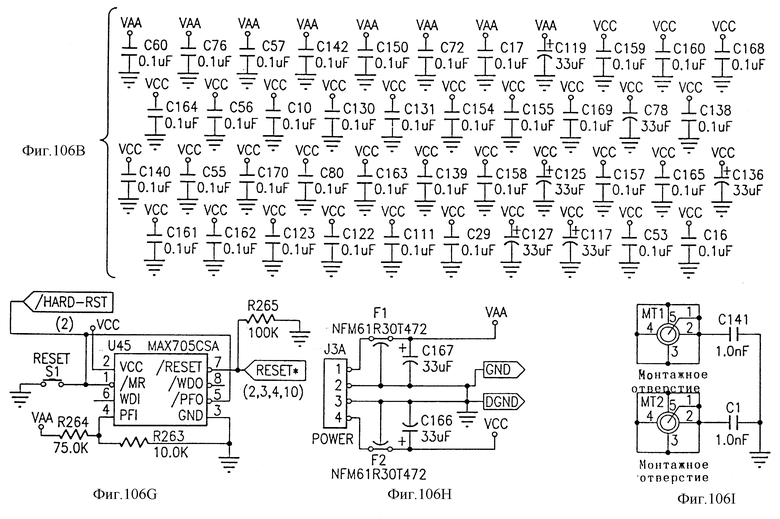
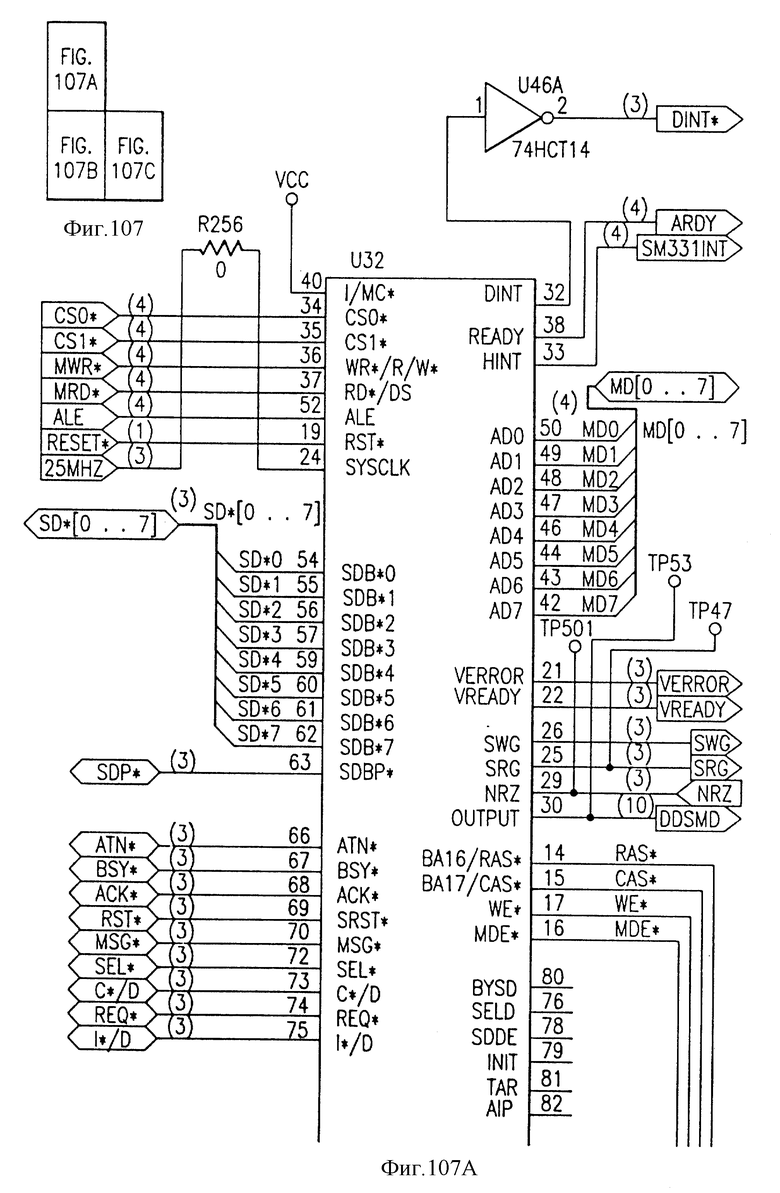
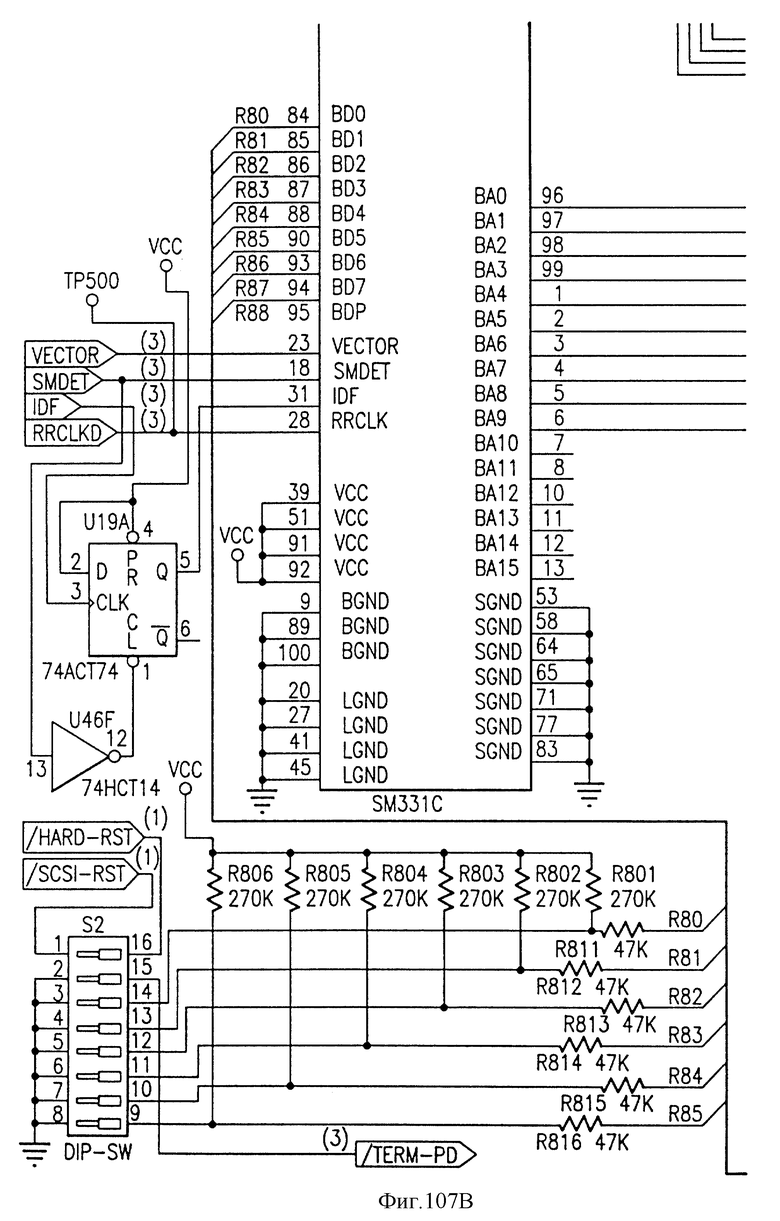

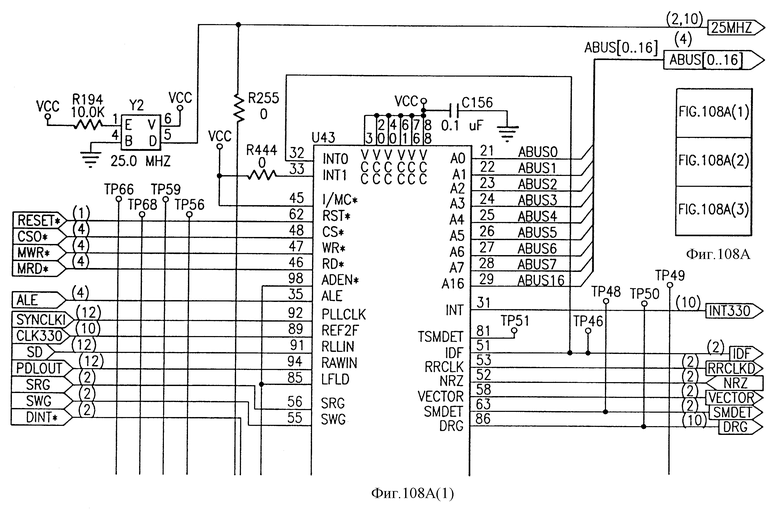
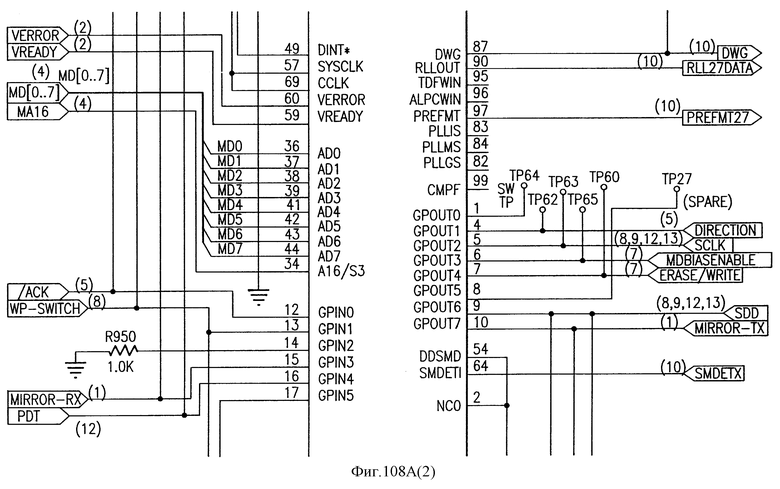
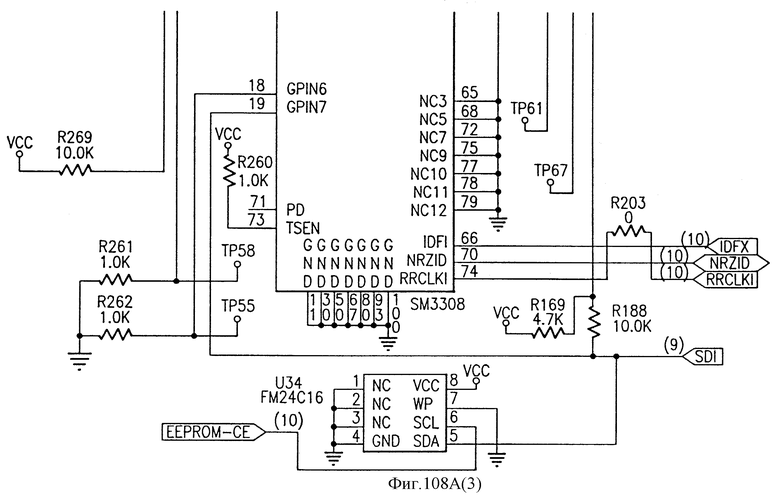
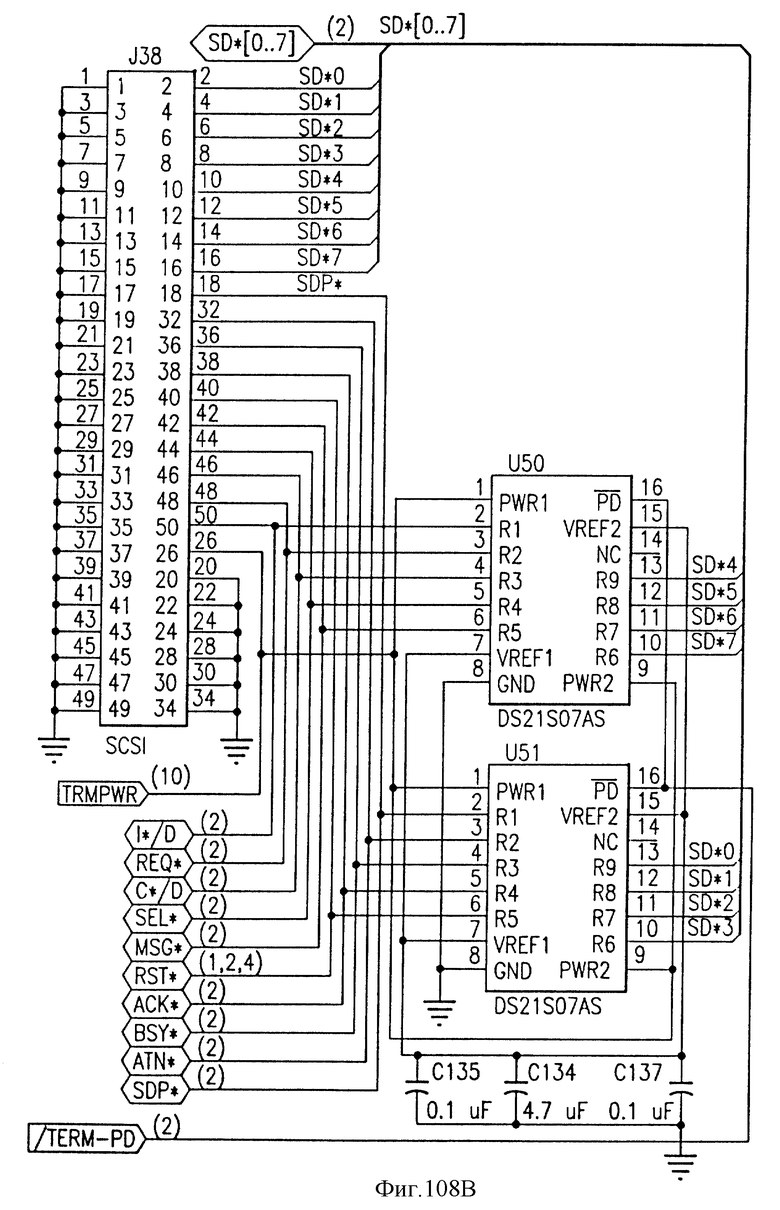
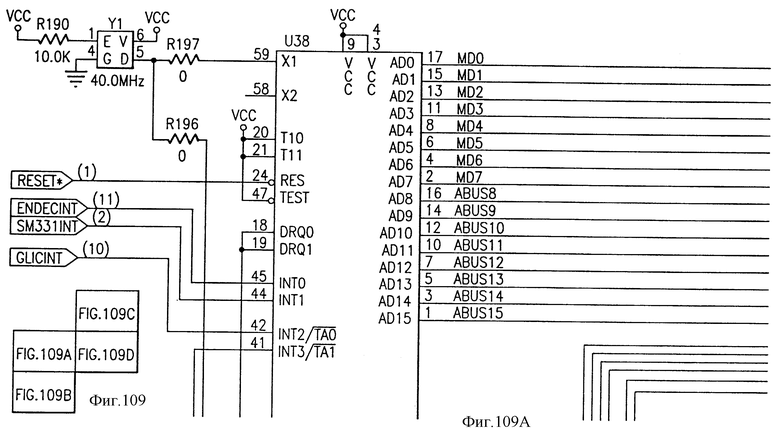
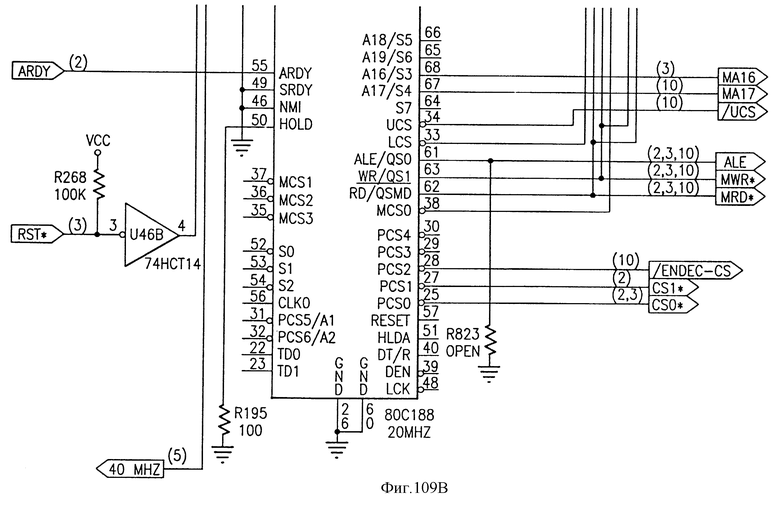
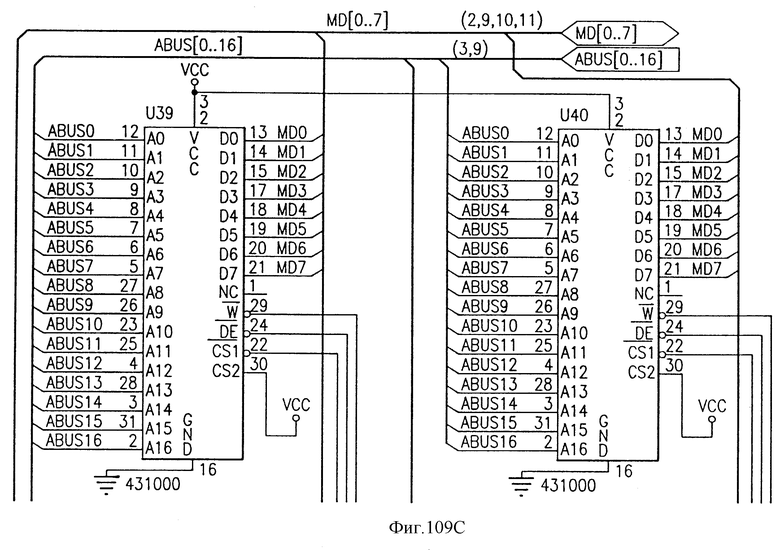
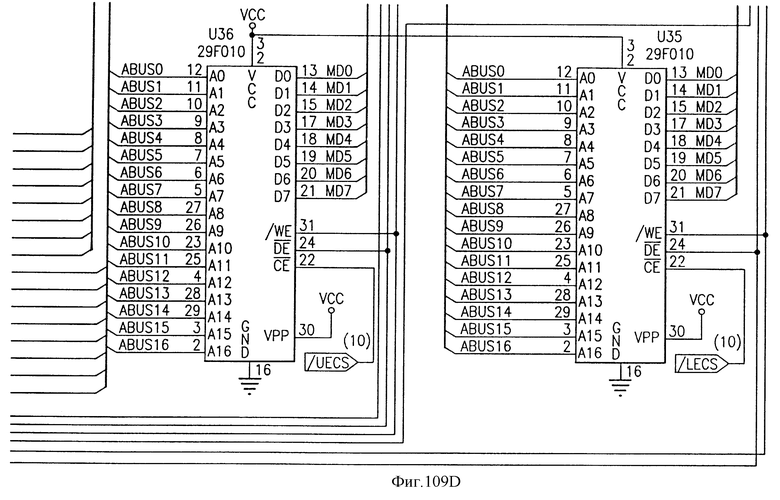
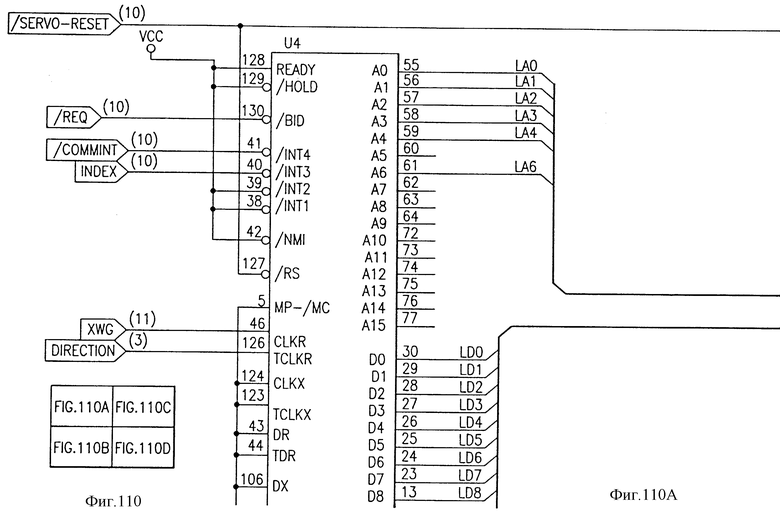
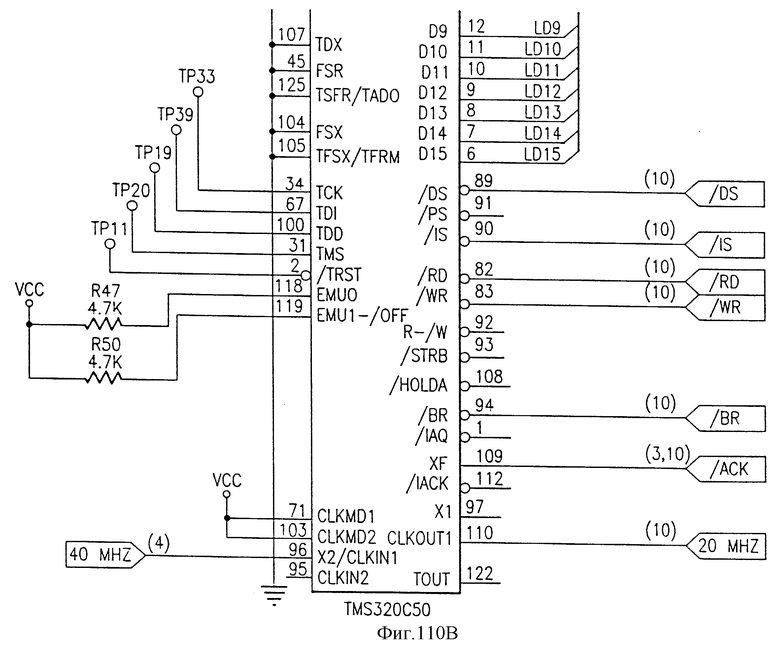




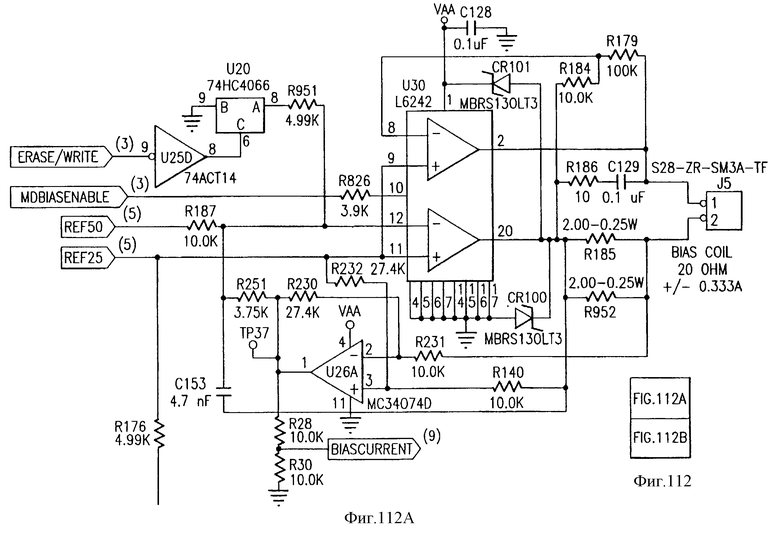

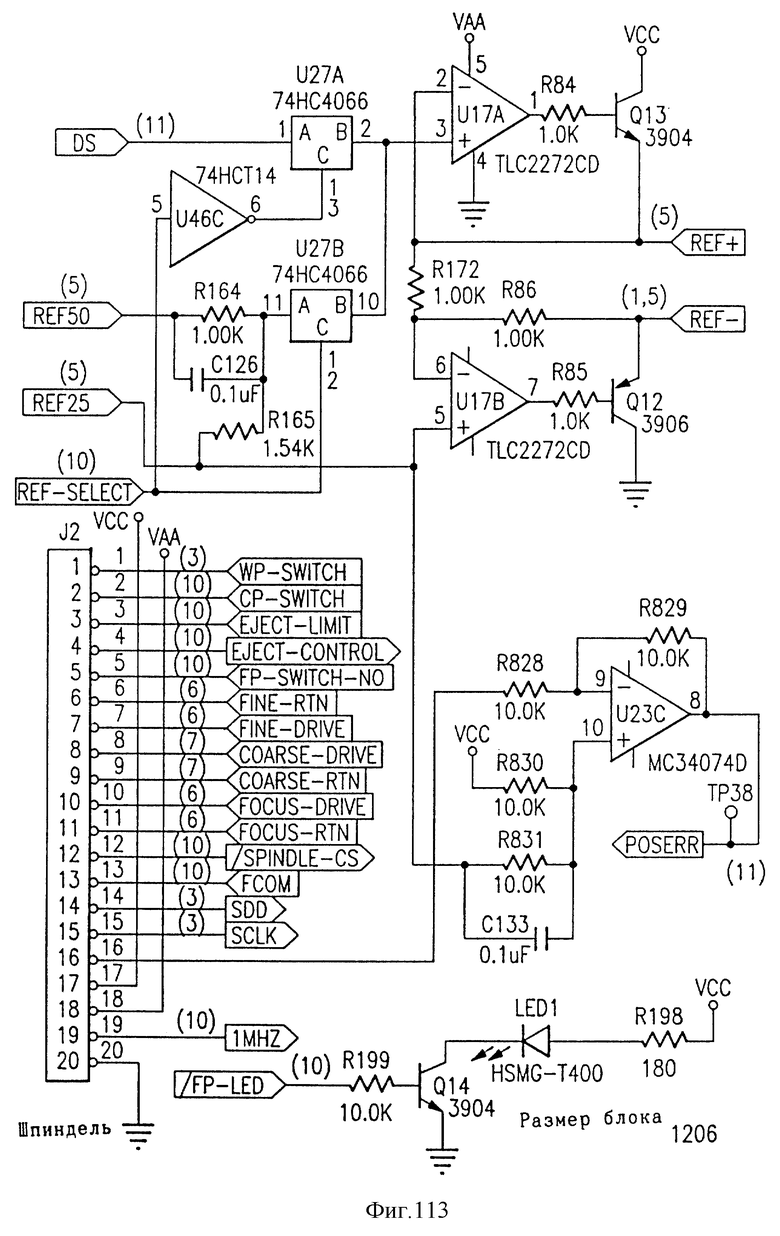
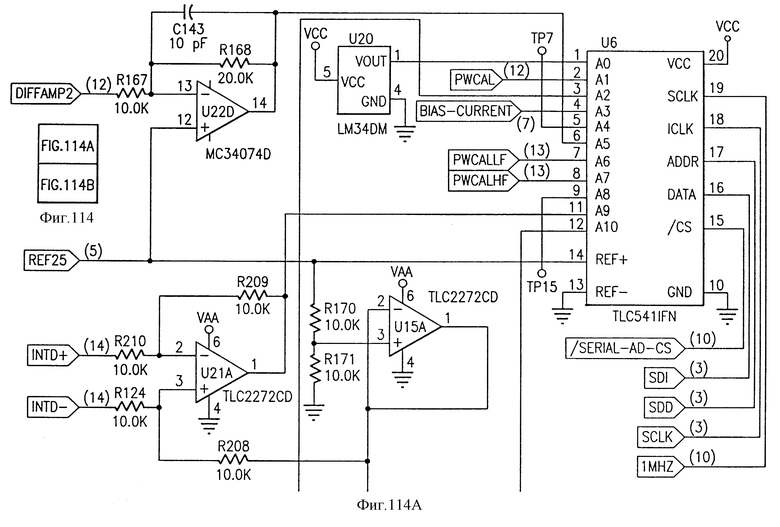
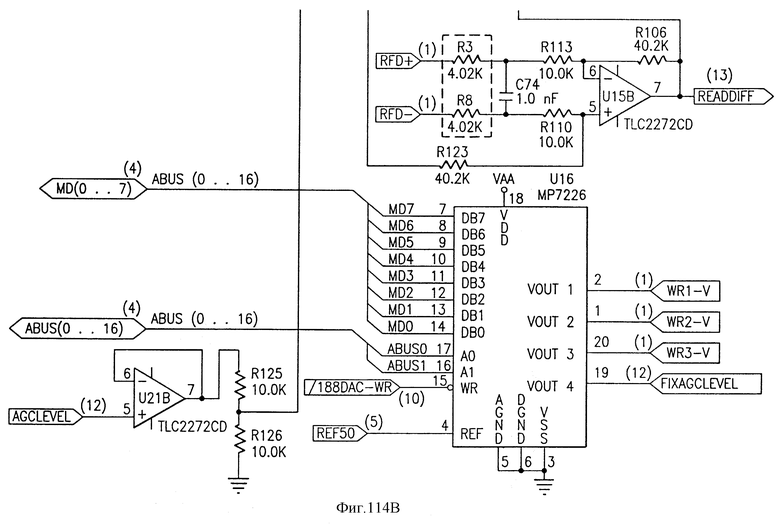



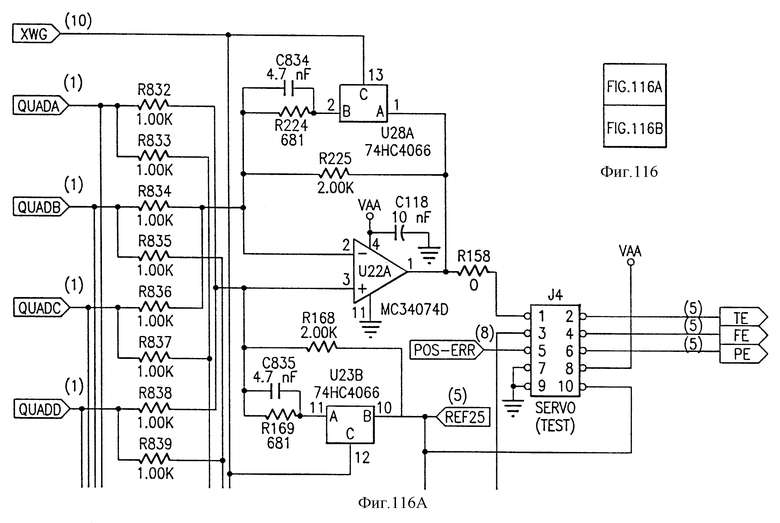

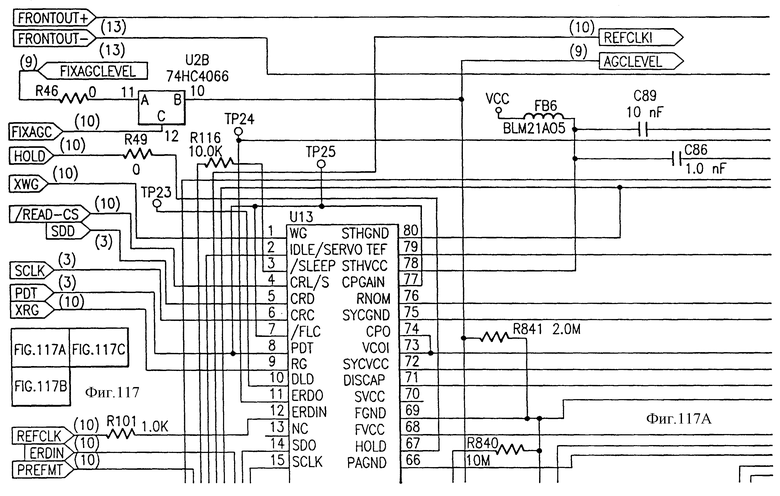
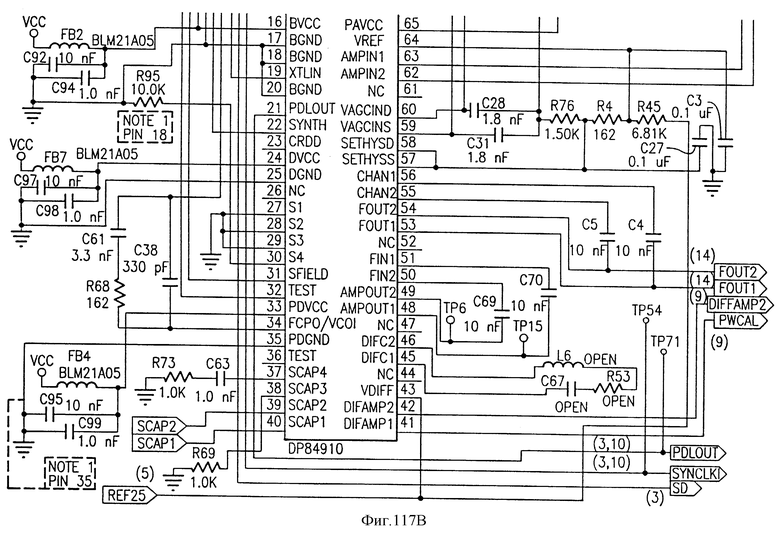
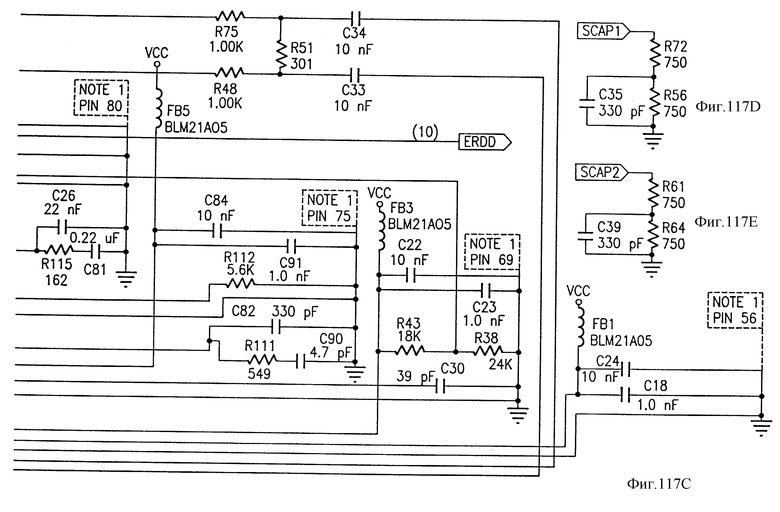
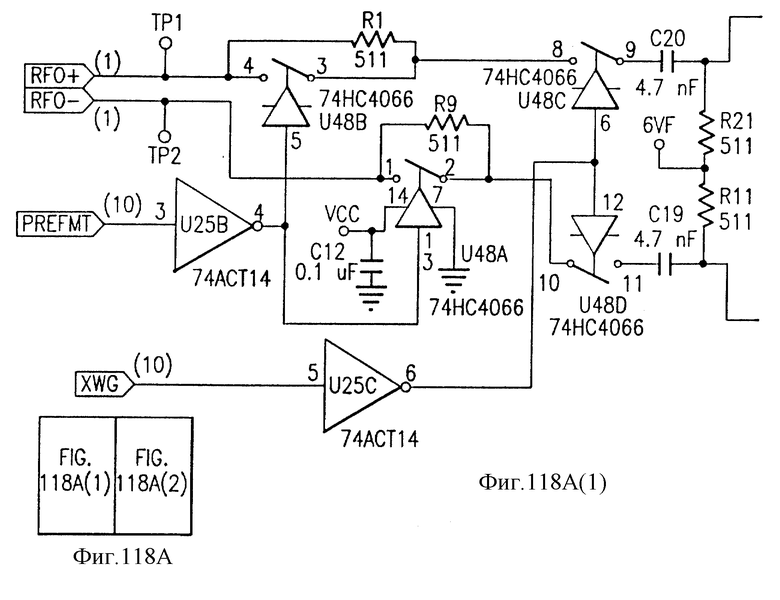

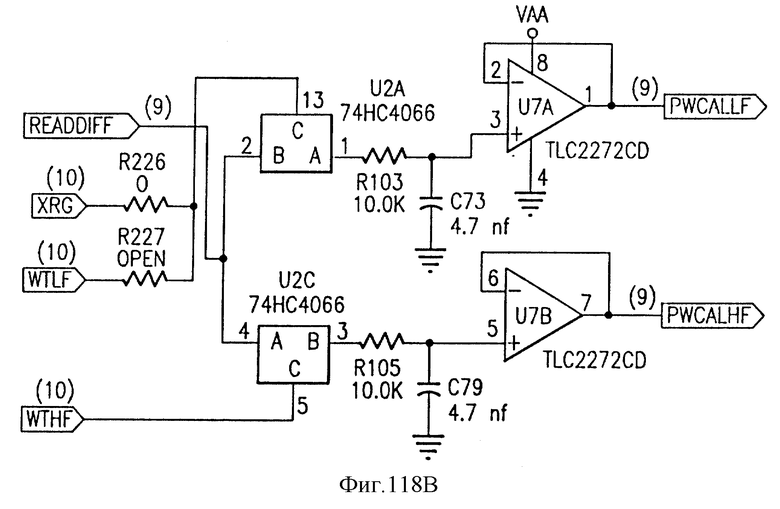
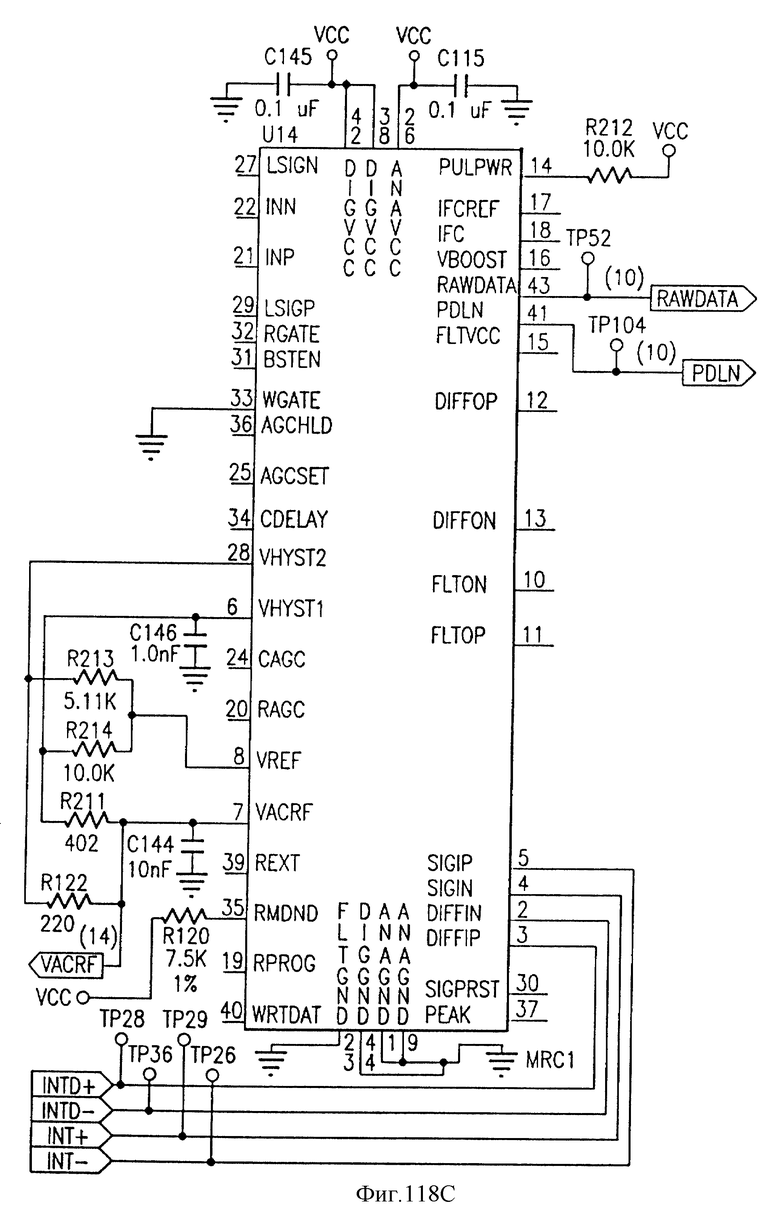

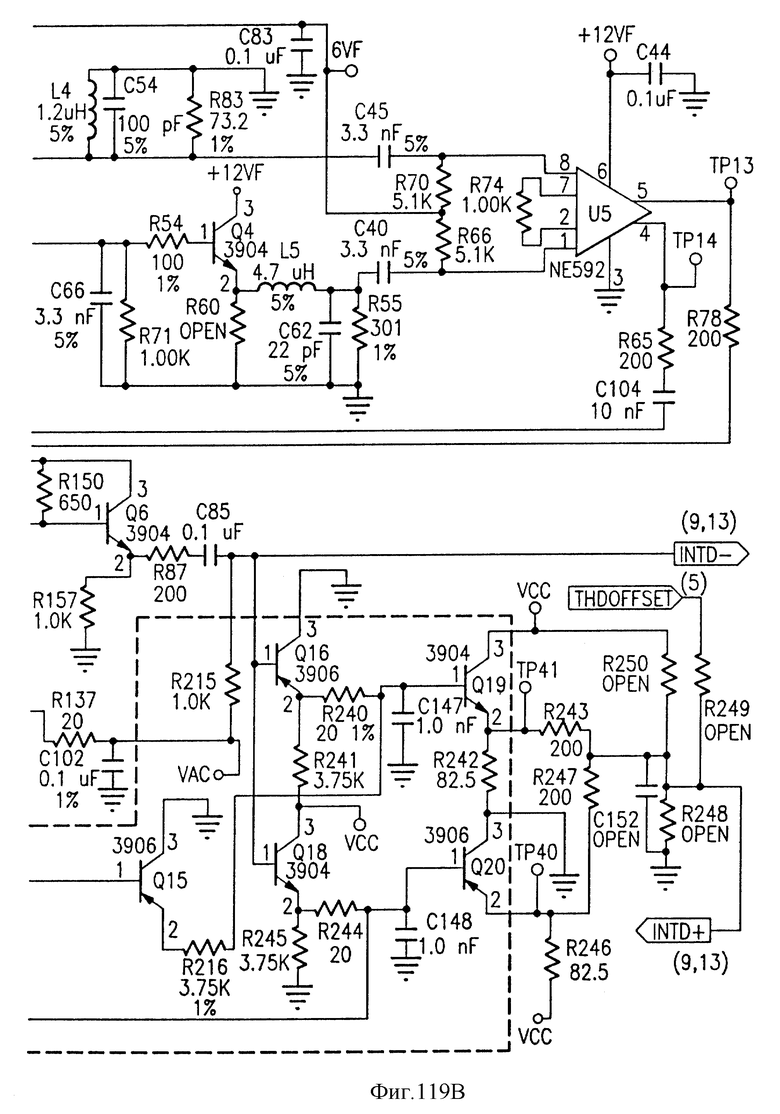
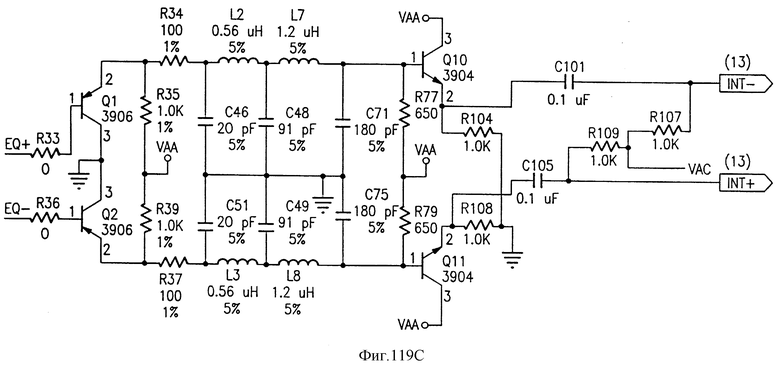
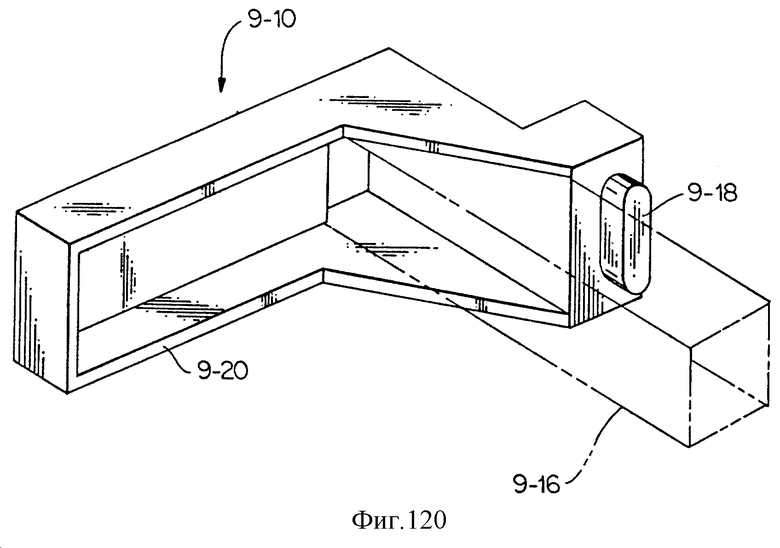
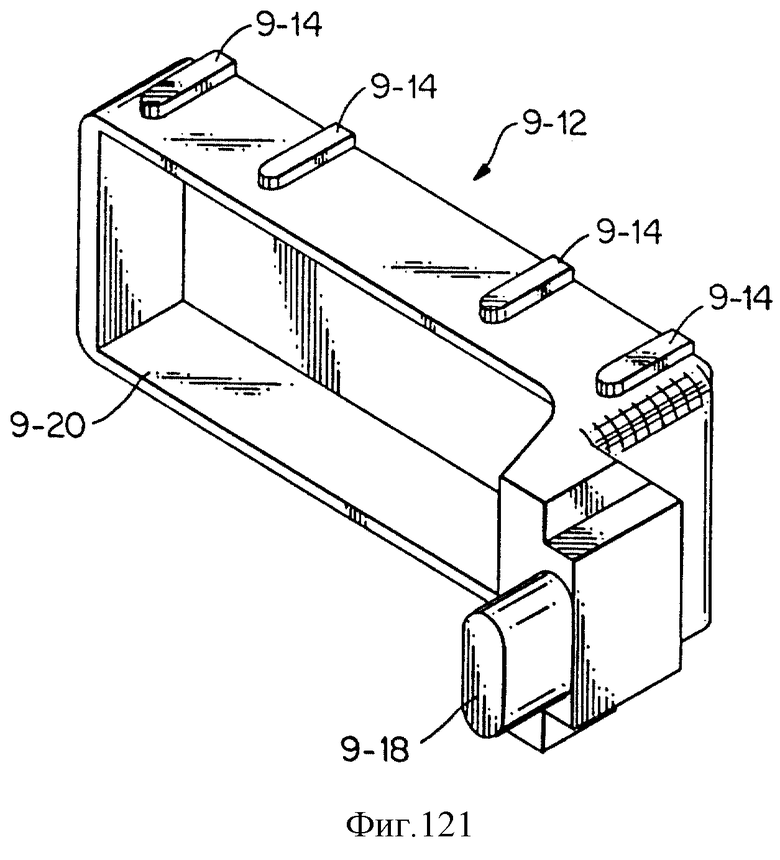
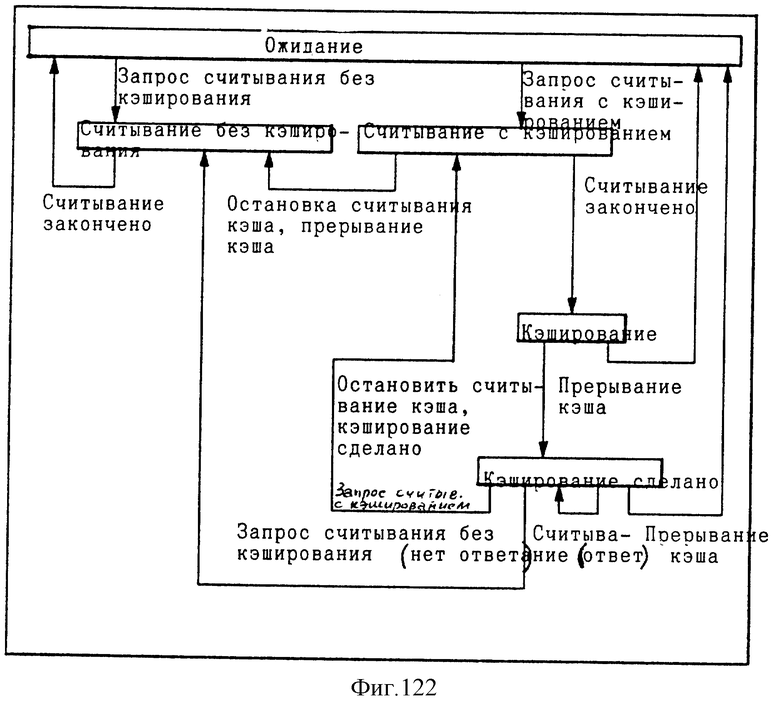
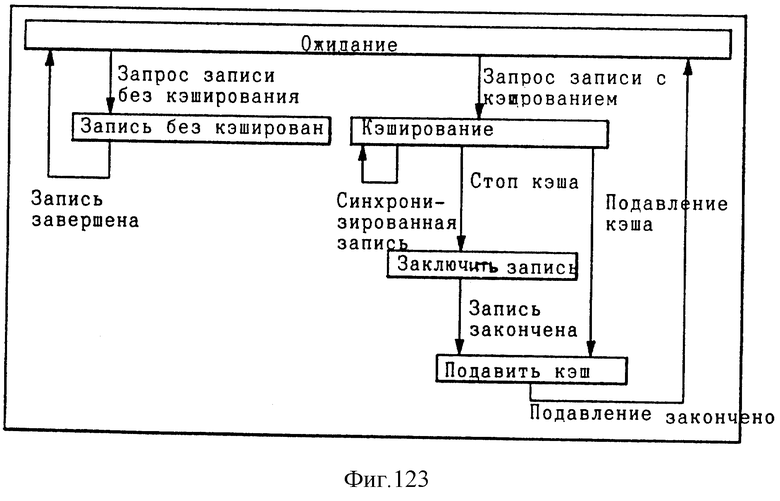
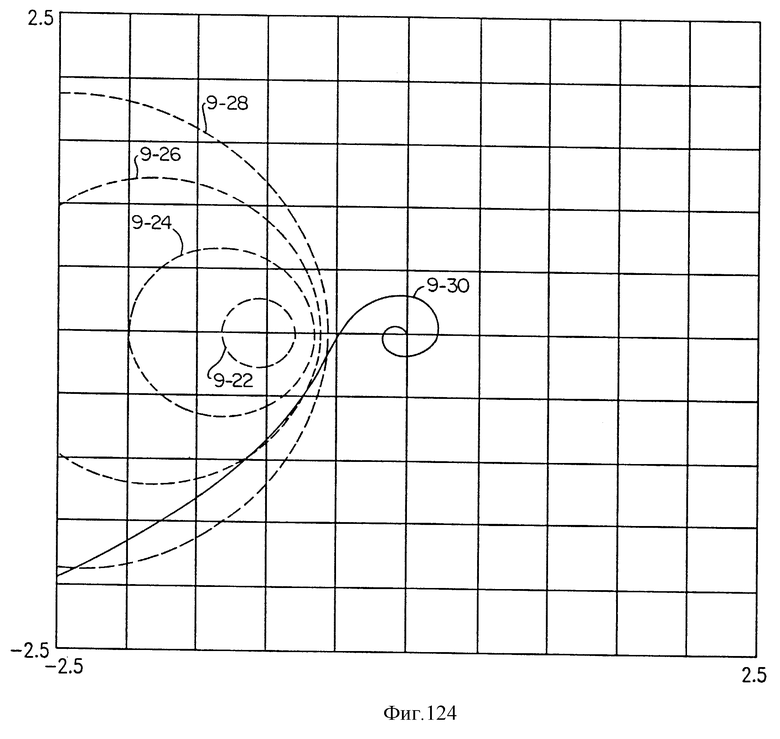
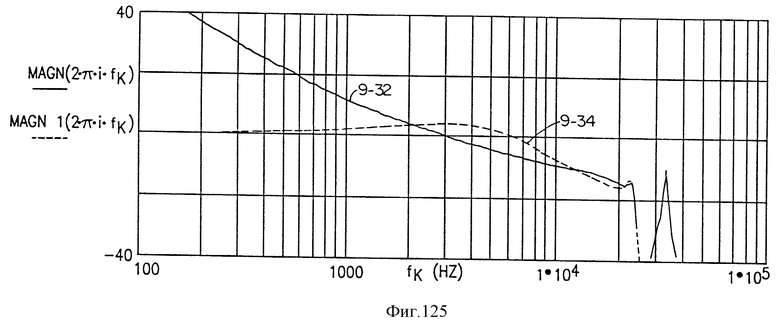
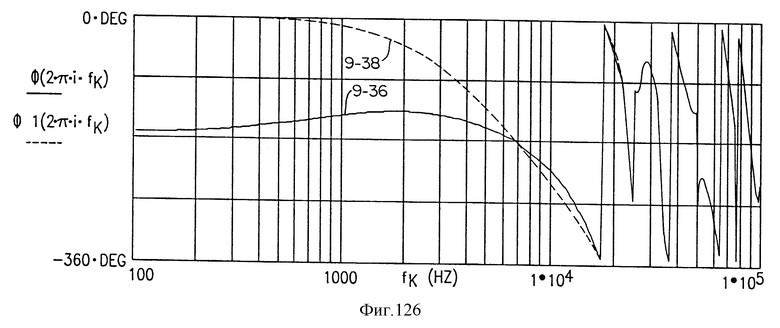
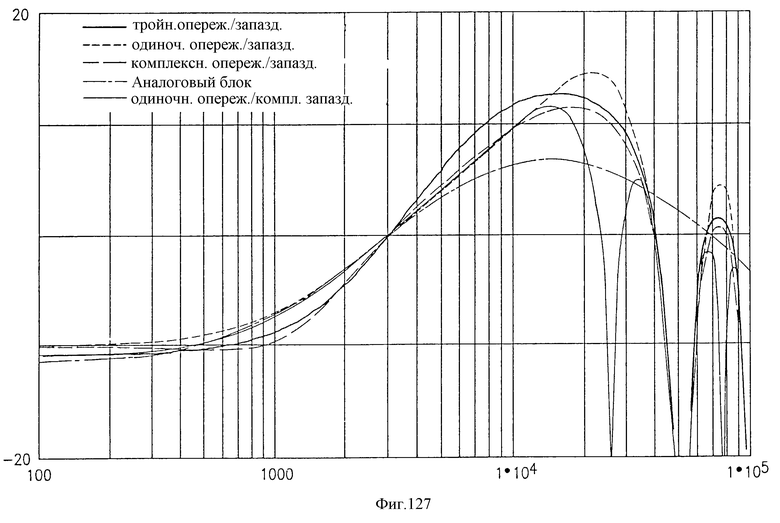
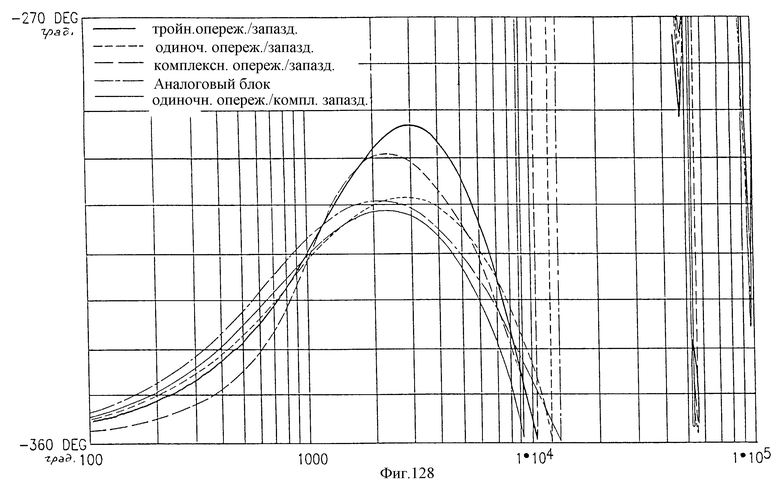
Изобретение относится к системам оптической записи и воспроизведения. Заявлен способ перемещения блока каретки из начального положения в конечное положение относительно носителя информации, вращающегося с окружной скоростью. Способ включает определение первого радиального расстояния между начальным положением и центром носителя, определение второго радиального расстояния между конечным положением и центром носителя, определение расстояния по окружности между начальным положением и конечным положением, определение начальной окружной скорости носителя, вычисление траектории скорости с учетом первого радиального расстояния, второго радиального расстояния, расстояния по окружности и начальной окружной скорости и перемещение блока каретки из начального положения в конечное положение по существу в соответствии с полученной траекторией скорости. Траектория скорости вычисляется таким образом, чтобы блок каретки перемещался как радиально, так и по окружности в конечное положение, по существу за одно и то же время. Кроме того, может быть определена конечная окружная скорость, и вращение носителя может быть изменено от начальной окружной скорости до конечной окружной скорости, а траектория скорости может, кроме того, учитывать конечную окружную скорость. Технический результат - уменьшение погрешности и повышение быстродействия, а также повышение эффективности работы устройства. 4 с.п. ф-лы, 251 ил., 46 табл.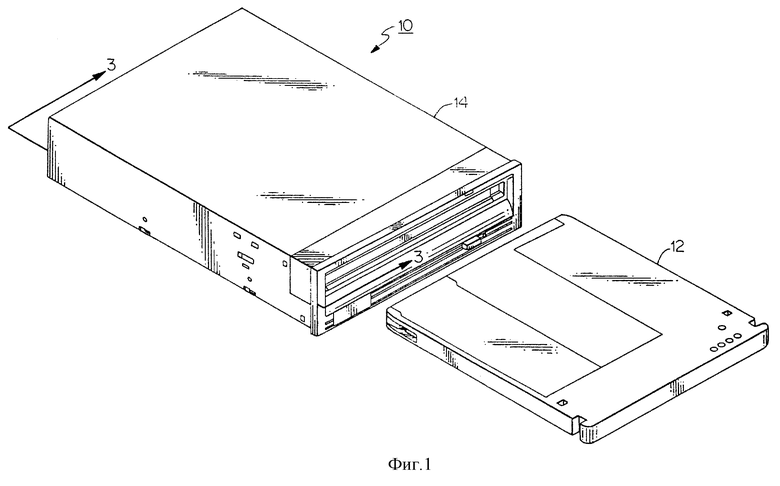
| US 4890277, 26.11.1989 | |||
| US 4837757, 06.06.1989 | |||
| US 5265079, 23.11.1993 | |||
| US 4323998, 06.04.1982 | |||
| US 5136440, 04.18.1992 | |||
| БАЗОВАЯ БАЛКА ДЛЯ МЕХАНИЗИРОВАННБ1Х ВЫЕМОЧНЫХ КОМПЛЕКСОВ И АГРЕГАТОВ | 1972 |
|
SU414422A1 |
| 0 |
|
SU150974A1 | |
| JP 467694 В4, 25.09.1986 | |||
| 1972 |
|
SU411925A1 | |
| JP 4506556 В4, 18.06.1986 | |||
| US 3897148, 29.07.1975 | |||
| US 4671467, 09.06.1987 | |||
| Комплект резьбонакатных роликов | 1977 |
|
SU724255A1 |
| US 5974007, 26.10.1999 | |||
| Дезинфицирующее средство | 1980 |
|
SU971343A1 |
| МИХАЙЛОВ В.И | |||
| и др | |||
| Запоминающие устройства на оптических дисках | |||
| - М.: Радио и связь, 1991, с.190. | |||
