Данное изобретение касается, в основном, систем позиционирования или определения положения и, в частности, систем, используемых для размещения объектов в замкнутом или экранированном пространстве. В особенности, если не касаться ограничений, относящихся к специфическим условиям, описанным ниже, исходя из наилучшей существующей практики, это изобретение касается системы определения положения для использования в экранированном пространстве, применяя сигналы типа GPS (сигналы Глобальной Навигационной Системы).
Развитию механизма обнаружения сближения и определения положения способствовал ряд предлагаемых устройств и систем. К ним относятся, например, описанное Хохштайном (Hochstein) и др. в патенте США N5311185 устройство обнаружения сближения, основывающееся на транспондере (приемоответчике), который периодически передает сигналы состояния. Трансиверы (приемопередатчики) стационарно установлены вокруг системы для приема и передачи сигналов. В патенте США N 5363425 (Муфти (Mufti) и др.) введен идентификатор, имеющий радиочастотный (RF) передатчик. Радиочастотные (RF) приемники размещены в телефонах в различных местах структуры. Местонахождение идентификатора - помещение с ближайшим телефоном. Андерс (Anders) и др. в патенте США N 4656463 предложили пассивный признак приемопередатчика, который улавливается активным приемопередатчиком. Эта контролирующая сближение система формирует базу по определению положения, идентификации и измерению перемещения для системы учета, обычно называемой LIMIS-системой.
Предшествующие устройства и системы, как, например, вышеупомянутые, были ориентированы на использование принципа обнаружения сближения. Как правило, эти устройства используют работающий на радиочастотах (RF) ответчик и работающий на радиочастотах (RF) приемник. Сближение определяется фактом обнаружения сигнала или силой сигнала. Существующие устройства обнаружения сближения, следовательно, имеют недостаточную возможность точного определения местонахождения объекта.
Однако один из существующих типов системы определения положения объектов предлагает преимущество точного определения местонахождения. Эта существующая на сегодняшний день система известна как Глобальная Навигационная Система (GPS). Эта система включает ряд спутников на орбите вокруг Земли. Каждый спутник выдает непрерывный сигнал, который несет как временную, так и пространственную составляющие, связанные с рядом орбитальных параметров. GPS-приемник, работающий вместе с соответствующим образом запрограммированным компьютером, используется, чтобы получить, по меньшей мере, четыре спутниковых сигнала и определить по ним точное местонахождение приемника. Эта информация о местонахождении обычно представлена как долгота, широта и высота. Критическим ограничением GPS является необходимость, чтобы спутники были "в прямой видимости" относительно приемника. Это означает, что не должно быть никакой преграды между минимально необходимым количеством спутников и приемником. Стандартная Глобальная Навигационная Система (GPS), следовательно, не будет функционировать внутри зданий, так как сигнал GPS блокирован стеклом, металлом, листвой, грунтом, кирпичом и различными другими материалами, которые вызывают отклонение сигнала. Сигнал GPS оптимально использовать в условиях типа плоской пустыни или на море. Таким образом, хотя GPS находит много важных применений на открытых пространствах, она в настоящее время не доступна для использования в помещениях или в экранированном пространстве.
Кроме упомянутых выше патентов США есть и другие, связанные с рассматриваемым вопросом и относящиеся исключительно к внешним сигналам. Это, например, патент США N 5051741 на Вэсби (Wesby); патент США N 5334974 на Симса (Simms) и др. и патент США N 4918425 на Гринберга (Greenberg) и др.
Становится широко признанным, что системы определения положения являются одними из наиболее важных в сегодняшнем обществе. В бизнесе и промышленности существует насущная потребность в точном размещении и/или отслеживании перемещения людей и материальных ресурсов типа состоящего на учете или основного оборудования. В настоящее время структуры типа Центра Мировой Торговли или больших фабрик, где работают тысячи людей, хотят иметь возможность размещения персонала, которому может потребоваться помощь в нахождении их пункта назначения. Это также справедливо и для больших тематических или луна-парков и других обширных туристических объектов. Кроме того, эта насущная необходимость обычно относится к персоналу, объектам и другому состоящему на учете оборудованию где бы они не находились - в закрытом помещении, вне его или если они перемещаются туда и обратно. Известные из уровня техники устройства и системы, обсужденные выше, не удовлетворяют этим потребностям, потому что они недостаточно точны или не способны в настоящее время работать внутри экранированного пространства или в помещениях.
Таким образом, до представляемого изобретения, описываемого ниже, не было предложено системы позиционирования, которая точно определяет положение объекта или человека, используя GPS или сигналы GPS-типа внутри замкнутого или экранированного пространства.
Таким образом, задачей изобретения является усовершенствование систем позиционирования и определения положения.
Другой задачей данного изобретения является увеличение числа ситуаций, в которых могут использоваться основанные на GPS системы позиционирования и определения положения.
Еще одной задачей изобретения является использование сигналов GPS в системах позиционирования и определения положения, не ограниченных применением только на открытых и неэкранированных пространствах.
Следующей задачей изобретения является использование в системе определения положения сигналов GPS-типа.
Еще одной задачей изобретения является точное размещение объектов, находящихся внутри замкнутого пространства, с использованием сигнала GPS.
Следующей задачей изобретения является точное размещение стационарного или движущегося объекта, находящихся в экранированном пространстве, с использованием сигнала типа GPS. Дополнительной задачей изобретения является точное размещение объектов, находящихся в экранированном пространстве, с использованием сигнала GPS.
Кроме того, задачей изобретения является точное размещение, как функция времени, объектов, находящихся внутри замкнутого пространства, с использованием сигнала типа GPS.
Кроме того, задачей изобретения является дистанционное обнаружение точного расположения объекта или человека, находящихся внутри замкнутого пространства или большого строения типа здания многоэтажного офиса, фабрики или склада, производственных или обрабатывающих мощностей типа судостроительной верфи или завода по перегонке нефти, а также находящихся в идущем в море корабле или космическом аппарате.
Кроме того, еще одной задачей этого изобретения является дистанционное обнаружение точного местонахождения человека, перемещающегося в пределах туристического парка, луна-парка или другого большого туристического объекта, которые могут быть экранированы от стандартных GPS-сигналов, чтобы таким образом помочь человеку найти нужный пункт назначения.
Еще одной задачей изобретения является использование псевдоспутников для передачи соответствующих сигналов GPS или GPS-типа во внутренних помещениях или в экранированном пространстве.
Кроме того, еще одной дополнительной задачей изобретения является точное размещение с использованием сигнала GPS или GPS-типа объекта или человека, перемещающегося между внутренним помещением или экранированным пространством и свободной открытой территорией.
Эти и другие задачи решаются в соответствии с данным изобретением, которое предлагает систему определения положения для использования в экранированном пространстве. Система включает в себя GPS-приемник для получения GPS-сигналов и передачи навигационных данных, блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных и, по меньшей мере, четыре псевдоспутника, установленные внутри экранированного пространства. По меньшей мере, один из четырех псевдоспутников - не компланарный относительно других. Компьютерный процессор генерирует соответствующий сигнал GPS-типа для каждого из, по меньшей мере, четырех псевдоспутников, и соответствующий сигнал GPS-типа содержит новые орбитальные параметры для каждого соответствующего псевдоспутника. Согласно одному из аспектов этого изобретения сигналы GPS-типа передаются в экранированную область, и их получает размещенное там приемное устройство. Приемное устройство обладает возможностью передачи сигналов положения. В одном из далее представленных конкретных воплощений этого изобретения компьютер и приемник сигналов положения связанны друг с другом. Приемник сигналов положения установлен внутри экранированного пространства, чтобы получить сигнал положения от приемного устройства так, чтобы точное положение приемника сигналов положения могло быть определено компьютером, обрабатывающим сигналы положения. Согласно конкретному использованию изобретения устройство определения положения включает в себя сотовый телефон или как альтернативу идентификатор, который может находиться с человеком, перемещающемся в экранированном пространстве.
Согласно другому варианту исполнения изобретения им обеспечивается размещение персонала и система отслеживания перемещений для использования на рабочих местах. В этом варианте система содержит приемник системы GPS для получения GPS-сигналов и передачи навигационных данных; блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных, по меньшей мере, четыре псевдоспутника, установленных на рабочих местах, один из этих, по меньшей мере, четырех псевдоспутников - не компланарный относительно других; компьютерный процессор генерирует соответствующий сигнал GPS-типа для каждого из, по меньшей мере, четырех псевдоспутников, причем соответствующий сигнал GPS-типа содержит новые орбитальные параметры для каждого псевдоспутника. Приемное устройство, установленное у лица, передвигающегося по территории рабочих мест, может передавать сигнал положения. Сигналы GPS-типа, передаваемые на территорию рабочих мест, получают приемное устройство и компьютер, имеющий приемник сигналов положения; приемник сигналов положения устанавливается на территории рабочих мест для получения сигналов положения от приемного устройства так, чтобы точное положение лица, несущего приемник сигналов положения, могло быть определено компьютерными средствами обработкой сигнала положения.
Согласно еще одному варианту исполнения изобретения им обеспечивается система определения местонахождения оборудования и отслеживания для использования в складских объектах. Этот вариант содержит GPS-приемник для получения GPS-сигналов и передачи навигационных данных, блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных, по меньшей мере, четыре псевдоспутника, расположенных на территории складского объекта, один из этих, по меньшей мере, четырех псевдоспутников - не компланарный относительно других; причем компьютерный процессор генерирует соответствующий сигнал GPS-типа для каждого из, по меньшей мере, четырех псевдоспутников, и соответствующий сигнал GPS-типа содержит новые орбитальные параметры для каждого псевдоспутника и приемное устройство, присоединенное к соответствующей единице оборудования в складском объекте. Это приемное устройство может передавать сигнал положения, а сигналы GPS-типа, передаваемые на территорию складского объекта, получает приемное устройство. Этот вариант исполнения изобретения, кроме того, содержит компьютер, имеющий приемник сигналов положения; приемник сигналов положения, установленный на территории склада для получения сигналов положения от приемного устройства так, чтобы точное положение соответствующей единицы оборудования могло быть определено компьютерными средствами при обработке сигнала положения.
Согласно еще одному варианту исполнения изобретения также обеспечивается персональная связь и система определения положения для использования внутри помещений. Аналогично, эта система содержит GPS-приемник для получения GPS-сигналов и передачи навигационных данных, блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных, по меньшей мере, четыре псевдоспутника, расположенных внутри помещения, один из этих, по меньшей мере, четырех псевдоспутников - не компланарный относительно других; причем компьютерный процессор генерирует соответствующий сигнал GPS-типа для каждого из, по меньшей мере, четырех псевдоспутников, соответствующий сигнал GPS-типа содержит новые орбитальные параметры для каждого псевдоспутника, приемное устройство в комбинации с сотовым телефоном, который несет лицо, перемещающееся в пределах помещения. Приемное устройство может передавать сигнал положения, сигналы GPS-типа, передаваемые в помещение, получает приемное устройство, и компьютер, имеющий приемник сигналов положения. Приемник сигналов положения устанавливается внутри помещения для получения сигналов положения от приемного устройства так, чтобы точное положение лица, несущего приемник сигналов положения, могло быть определено компьютером при обработке сигнала положения. Сотовый телефон, таким образом, обеспечивает персональную связь с оператором компьютера.
Кроме того, еще один вариант исполнения обеспечивает объединенную систему определения положения для объектов, перемещающихся между экранированной средой и свободным открытым пространством. Эта система включает множество спутников глобальной навигационной системы, находящихся на орбите вокруг Земли, каждый из спутников глобальной навигационной системы передает стандартный GPS-сигнал; первый GPS-приемник для получения стандартных сигналов GPS и передачи навигационных данных; блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных, по меньшей мере, четыре псевдоспутника, установленных в экранированном пространстве, один из этих, по меньшей мере, четырех псевдоспутников - не компланарный относительно других; причем компьютерный процессор генерирует соответствующий сигнал GPS-типа для каждого из, по меньшей мере, четырех псевдоспутников, соответствующий сигнал GPS-типа содержит новые орбитальные параметры для каждого псевдоспутника; приемное устройство, установленное на движущемся объекте, может передавать сигнал положения. Сигналы GPS-типа, передаваемые в экранированное пространство, получают приемное устройство и компьютер, соединенный с приемником сигналов положения. Приемник сигналов положения устанавливается в экранированном пространстве для получения сигналов положения от приемного устройства так, чтобы точное внутреннее положение объекта, имеющего приемник сигналов положения, могло быть определено компьютерными средствами при обработке сигнала положения, когда объект находится внутри экранированного пространства. Этот вариант исполнения обеспечивается вторым GPS-приемником, установленным на движущемся объекте. Второй GPS-приемник используется для получения стандартных GPS-сигналов в то время, когда объект находится на свободном открытом пространстве, для того, чтобы могло быть получено точное наружное положение движущегося объекта, имеющего второй GPS-приемник.
Еще один вариант исполнения изобретения направлен на систему определения внутреннего положения, имеющую GPS-приемник для получения GPS-сигналов и передачи навигационных данных (NAVDAT), блок восстановления тактовой синхронизации для получения навигационных данных (NAVDAT) и восстановления точного временного сигнала, компьютер для получения точного временного сигнала и навигационных данных (NAVDAT), компьютер, обладающий возможностью обработать данные от, по меньшей мере, четырех псевдоспутников, и псевдоспутники, способные передавать сигналы с данными псевдоспутников, причем сигналы данных псевдоспутников используются для определения внутреннего положения. В дальнейшем этот вариант может включать второй GPS-приемник для получения сигналов с данными псевдоспутников, способный использовать сигналы данных псевдоспутников для определения внутреннего положения этого второго GPS-приемника, и связь между вторым GPS-приемником и компьютером. Эта связь может быть выполнена как система двойного действия, которая может передавать данные о положении второго GPS-приемника компьютеру и передавать информацию от компьютера ко второму GPS-приемнику.
Согласно другому аспекту этого изобретения обеспечивается способ обеспечения внутренней системы позиционирования. Этот способ включает следующие шаги: получение сигналов GPS, вычисление точного временного сигнала из сигналов GPS, вычисление орбитальных параметров для, по меньшей мере, четырех псевдоспутников и передачу сигналов данных псевдоспутников, используя вычисленный временной сигнал и орбитальные параметры для, по меньшей мере, четырех псевдоспутников. В дальнейшем этот способ может включать получение информации с навигационными данными (NAVDAT) из принятых сигналов GPS, использование информации с навигационными данными (NAVDAT) для вычисления орбитальных параметров псевдоспутников, а также внесение поправок в информацию с навигационными данными (NAVDAT) при вычислении орбитальных параметров, а также задержке вычисленного временного сигнала, учитывающей различное время прохождения сигнала к каждому из псевдоспутников.
Кроме того, согласно еще одному аспекту этого изобретения обеспечивается внутренняя система позиционирования, имеющая данные о физическом расположении, по меньшей мере, четырех псевдоспутников, блок времени для обеспечения точного временного сигнала, компьютер для вычисления данных псевдоспутников, полученных из данных о положении и временного сигнала, а также связанный с компьютером передатчик для передачи сигналов с данными псевдоспутников, полученных из данных псевдоспутников. Такой вариант исполнения изобретения в дальнейшем может включать второй GPS-приемник для получения сигналов с данными псевдоспутников, второй GPS-приемник, выполненный с возможностью использования сигналов с данными псевдоспутников для определения его внутреннего положения. В одном из конкретных вариантов выполнения изобретения обеспечивается связь между вторым GPS-приемником и компьютером. Эта связь может иметь форму системы двойного действия, которая может передавать данные о положении второго GPS-приемника компьютеру и передавать информацию от компьютера ко второму GPS-приемнику.
В соответствии с еще одним вариантом исполнения способа согласно изобретению должны быть осуществлены следующие шаги. Во-первых, предоставление информации о положении, по меньшей мере, четырех псевдоспутников, затем предоставление точного временного сигнала, а также вычисление данных для каждого псевдоспутника, используя информацию об их положении, и, далее, передача данных псевдоспутников и точного временного сигнала, при этом передача точного временного сигнала для каждого из псевдоспутников производят с задержкой, учитывающей различное время прохождения сигнала к псевдоспутникам.
Другие задачи представляемого изобретения, как и дополнительные особенности и преимущества, будут очевидны из следующего описания некоторых особо предпочтительных вариантов исполнения представляемого изобретения, которые показаны на прилагаемых чертежах, в которых одни и те же номера обозначают одни и те же компоненты:
Фиг. 1 - графическое представление устройства Глобальной Навигационной Системы (GPS) согласно уровню техники;
Фиг. 2 - графическое представление одного из вариантов системы внутреннего позиционирования в соответствии с изобретением;
Фиг. 3 - графическое представление другого варианта системы внутреннего позиционирования в соответствии с изобретением;
Фиг. 4 - графическое представление варианта системы внутреннего позиционирования в соответствии с подходом, предлагаемым изобретением;
Фиг. 5 - блок-схема аппаратуры, использующейся в системе внутреннего позиционирования согласно данному изобретению;
Фиг. 6 - технологическая схема программного обеспечения, используемого в представляемой системе внутреннего позиционирования;
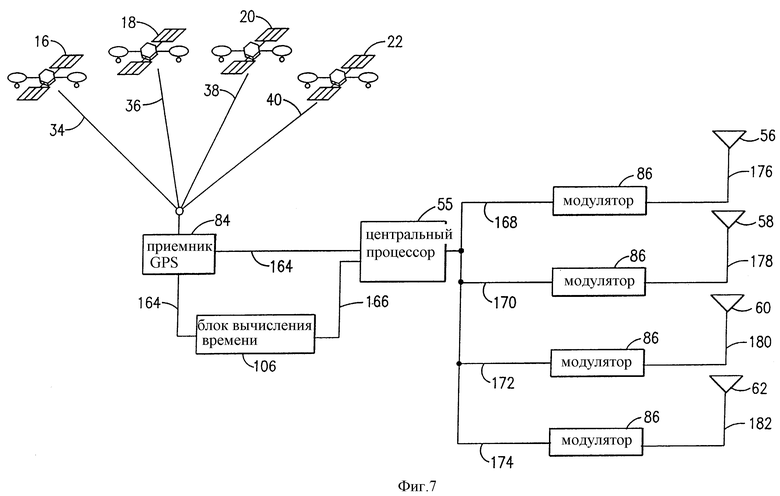
Фиг. 7 - блок-схема, показывающая полную структуру одного из конкретных воплощений системы внутреннего позиционирования в соответствии с изобретением;
Фиг. 8 - детальная блок-схема, дополнительно иллюстрирующая блок восстановления тактовой синхронизации, описанный в сочетании с фиг. 7;
Фиг. 9 - детальная блок-схема, описывающая модулятор, использующийся в соответствии с изобретением;
Фиг. 10 - детальное графическое представление структуры, имеющей систему внутреннего позиционирования в соответствии с изобретением, как это представлено в Примере 1, описанном ниже;
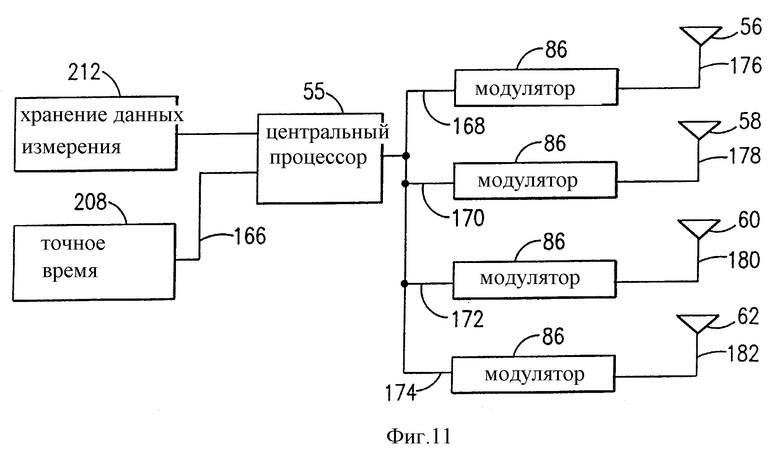
Фиг. 11 - блок-схема, подобная блок-схеме на фиг. 7, показывающая полную структуру другого варианта воплощения системы внутреннего позиционирования в соответствии с изобретением.
Обратимся теперь к чертежам, сначала к фиг. 1, где показана Глобальная Навигационная система 10 согласно предшествующему уровню техники. Система 10 представляет действующую в настоящее время Глобальную Навигационную Систему NAVSTAR, которая включает в себя множество спутников, представленных на чертеже спутниками 12-26, движущихся по орбите Земли 28, Число спутников двадцать четыре (24) - фактически используемое. Орбитальные спутники 12-26 передают или транслируют сигналы 30-44 соответственно к Земле 28. Сигналы 30-44 содержат информацию двух типов. Первый тип информации - закодированная информация о точном времени, а второй - чрезвычайно точная закодированная информация о положении. GPS-приемник, размещенный, например, в позиции 45, способен определить его точное местонахождение, измеряя разность между любыми из четырех GPS-сигналов и вычисляя пространственное расстояние или интервал до каждого спутника. Приемник затем использует эти данные и известное положение каждого спутника, чтобы определить его собственное положение в пространстве или на поверхности земли. Глобальная Навигационная Система NAVSTAR наиболее полно описана в "Руководстве Летчика по GPS" Била Кларка (Bill Clarke) и в монографии "Глобальная Навигационная Система NAVSTAR" Тома Логсдона (Тоm Logsdon), содержание которых входит в виде части из предшествующего уровня техники. Однако существующая система GPS во многих ситуациях не функционирует. Такие ситуации включают в себя, например, расположения объектов в зданиях, в городской среде, где есть ряд высоких строений, под водой, в густых лесах и под землей.
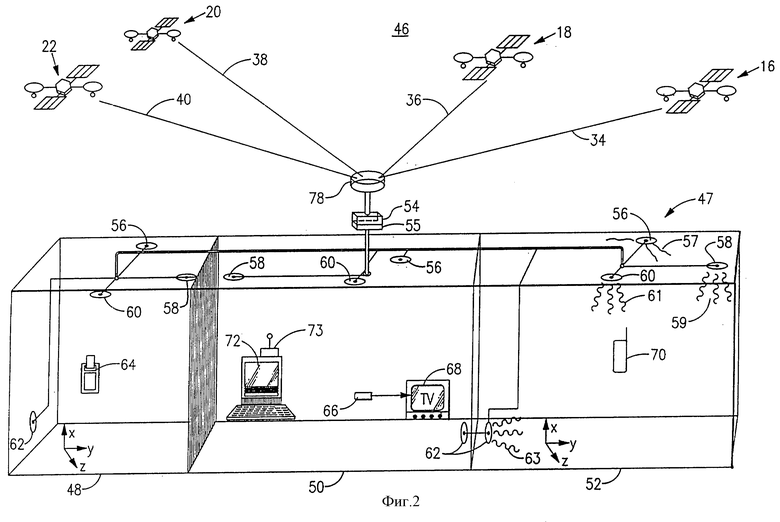
Ссылаемся на фиг. 2, где показан один из вариантов системы 46 внутреннего позиционирования в соответствии с настоящим изобретением. Фиг. 2 показывает здание 47, имеющее первое помещение 48, второе помещение 50 и третье помещение 52. На фиг. 2 иллюстрируются три различных варианта использования системы 46 внутреннего позиционирования. Эти различные варианты использования будут кратко описаны перед подробным обсуждением далее специфических компонентов системы 46 внутреннего позиционирования.
В первом варианте использования для определения своего внутреннего положения используется идентификатор 64. Идентификатор 64 может быть предоставлен в комплектации с дополнительным передатчиком (не показан), передающим положение идентификатора. Во втором варианте использования указатель 66 позволяет связать его внутреннее положение с положением другого известного объекта типа телевизора 68. Устанавливая относительное положение двух объектов, можно определить вектор перемещения указателя. В третьем варианте использования в качестве устройства, позволяющего точно определить его местонахождение и с пользой использовать эту информацию, показан сотовый телефон 70.
В связи с обсужденным выше третьим вариантом в настоящее время рассматривается возможность, что спутники скоро будут обладать способностью выполнять поиск ячейки конкретного сотового телефона в конкретных сотовых областях. Для того, чтобы сотовый телефон такой усовершенствованной подвижной системы мог успешно функционировать, сотовый телефон должен иметь возможность определять свое положение и передавать эту информацию при работе в совершенно разных областях. Таким образом, сотовый телефон, базирующийся в Лос-Анджелесе, может использоваться в Нью-Йорке. Сотовый телефон 70, представленный здесь, допускает функционирование таким способом. Когда самоопределяющий свое положение сотовый телефон 70 активирован в Нью-Йорке, он сообщает свое внутреннее или внешнее положение и, таким образом, включается в новую локальную область. Таким образом, здесь предложены различные конфигурации приемников системы внутреннего позиционирования в соответствии с задачами изобретения. Сотовый телефон 70, например, содержит стандартный GPS-приемник, который обеспечивается интерфейсом для работы сотового телефона. Идентификатор 64 и указатель 66 могут содержать более специализированный приемник, который отвечает на множественные сообщения, содержащиеся в сигнале GPS-типа, описанном ниже. Эти сообщения могут содержать специализированную информацию, типа адреса улицы, почтовых индексов, кодов области и т. п., чтобы сделать возможными более специфические функции системы.
На фиг. 2 показано, что, например, GPS-спутники 16-22 направляют соответственно GPS-сигналы 34-40 к зданию 47. Сигналы 34-40 передаются принимающей и передающей системе 54, которая распространяет соответствующие сигналы GPS-типа внутренним антеннам или псевдоспутникам 56-62, каждый из которых устанавливается в каждой из комнат 48-52, как показано на фиг. Вариант исполнения системы 46 внутреннего позиционирования, показанной на фиг. 2, использует четыре канала, которые передают новые радиочастотные сигналы GPS-типа, модулированные с орбитальными данными, соответствующими фактическому расположению псевдоспутников 56-62. Форма модуляции идентична форме стандартного GPS-сигнала. Специфические содержащиеся данные выработаны внутри системой 46 внутреннего позиционирования. Принимающая и передающая система 54 производит соответствующие изменения для каждого из этих сигналов, чтобы учесть позиционное смещение. Пример позиционного смещения обсужден ниже при описании фиг. 10.
Предпочтительно, чтобы комнаты 48-52 были электрически изолированы друг от друга. Это гарантирует, что сигналы системы внутреннего позиционирования из одной комнаты не передаются в другую комнату. Если комнаты 48-52 друг от друга электрически не изолированы, требуется только один набор псевдоспутников 56-62. В качестве альтернативы рассматривается возможность совместного использования псевдоспутника или любой их комбинации в двух или более различных комнатах. Этот аспект изобретения проиллюстрирован псевдоспутником 62, общим для двух комнат 50 и 52, как показано на фиг. 2. Такой способ совместного использования псевдоспутников возможен даже, когда две комнаты электрически изолированы друг от друга. Система 46 внутреннего позиционирования может быть применена в любом здании с одной или несколькими комнатами, пока несущая радиочастота или другая несущая частота может проникать через стены. Кроме того, предпочтительно размещать четыре псевдоспутника в комнате в диагонально противоположных углах, чтобы максимизировать расстояния между ними, что, в свою очередь, максимизирует точность определения положения системы 46 внутреннего позиционирования.
Как показано на фиг. 2 и 3, идентификатор 64 и сотовый телефон 70 обладают возможностью определить свое внутреннее положение, используя стандартные GPS-сигналы, полученные антенной 78 и принимающей и передающей системой 54, как это подробно описано ниже.
Передающая система 54 обеспечивается компьютерным процессором 55, который преобразовывает каждый из стандартных GPS-сигналов 34-40 в соответствующий или внутренний сигнал GPS-типа, который включает в себя временной и позиционный компоненты сигнала GPS с новыми орбитальными параметрами. Эта обработка будет подробно описана ниже. Сигналы GPS-типа, генерированные процессором 55, по проводам передаются на соответствующий псевдоспутник. Таким образом, новые орбитальные параметры, генерированные процессором 55, касаются точного физического положения каждого соответствующего псевдоспутника относительно помещения, в которое он установлен. Система 46 внутреннего позиционирования требует минимум четыре GPS-спутника, каждый из которых выдает стандартный GPS-сигнал, и связанный с ними минимум четырех соответствующих псевдоспутников, каждый из которых получает по проводам модулируемый сигнал GPS-типа, выдаваемый процессором 55. Один из минимум четырех соответствующих псевдоспутников, необходимых для системы 46 внутреннего позиционирования, должен быть не компланарным относительно других. Это требование иллюстрируется на фиг. 2 и 3 псевдоспутником 62, не компланарным относительно псевдоспутников 56, 58 и 60.
Продолжая описание системы 46 внутреннего позиционирования, каждый из псевдоспутников 56, 58, 60 и 62 выдает соответственный сигнал 57, 59, 61 и 63, который передается в соответствующую электрически изолированную комнату. Идентификатор 64 и сотовый телефон 70 обеспечены приемником, способным принимать сигналы 57, 59, 61 и 63. Идентификатор 64 и сотовый телефон 70, в свою очередь, могут передать свое точное положение обратно компьютерной системе 72, оборудованной приемной антенной 73. Компьютерная система 72 снабжена программным обеспечением, которое может вычислить точное положение идентификатора 64 или сотового телефона 70 относительно внутреннего помещения или экранированного пространства. Эта информация о положении может быть распечатана или отображаться на мониторе в любой желательной форме как номер этажа и комнаты. Кроме того, предусмотрено, что может быть разработан потребительский план для каждой конкретной среды, здания или области и запрограммирован в программное обеспечение компьютерной системы так, чтобы выводимые данные о местонахождении могли бы быть представлены в терминах известных зон, секторов или других графических или любых рассматриваемых координат. Таким образом, при таком применении оператор компьютерной системы 72 может определять положение находящихся внутри здания людей, имеющих идентификатор 64 или сотовый телефон 70. В случае, если лицо несет телефон 70, оператор компьютера может быстро связываться с ними на индивидуальной основе.
Ясно, что применение настоящего изобретения не ограничено только идентификатором 64 или сотовым телефоном 70, оно также может использоваться в сочетании с пейджером, с персональным компьютером, электронным огенайзером, часами, роботом или различными другими объектами или элементами, перемещаемыми индивидуумами, движущимися в конкретном пространстве. К тому же следует брать в расчет, что не для каждого помещения необходима компьютерная система 72. Если помещения электрически изолированы, то в эти помещения поставляется приемник 73. В этом случае все приемники 73 соединены с общей компьютерной системой 72, которая в свою очередь может быть расположена где угодно, в том числе в сотнях миль от здания, в котором смонтирована собственно сама система 46.
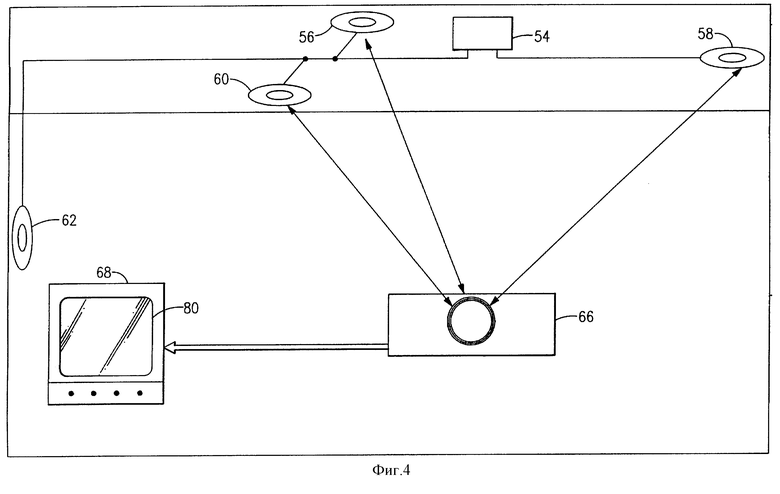
На фиг. 4 более подробно показана связь указателя 66 и телевизора 68. Первоначально различные устройства предлагались для взаимного использования с телевизором. Эти устройства включают сенсорно-чувствительные экраны, устройства ввода типа "мышь", устройства дистанционного управления и т.д. В системе 46 используется связь указателя 66 с телевизором 68. Указатель 66 представляет собой предпочтительно приемник с возможностью определения направления, обеспечиваемого, например, гироскопом. Как описано выше, при определении положения телевизора 68 и указателя 66 может быть реализован указатель-на-расположение 80. Этот метод указатель-на-расположение преимущественно используется в установлении связи с телевизионными образами.
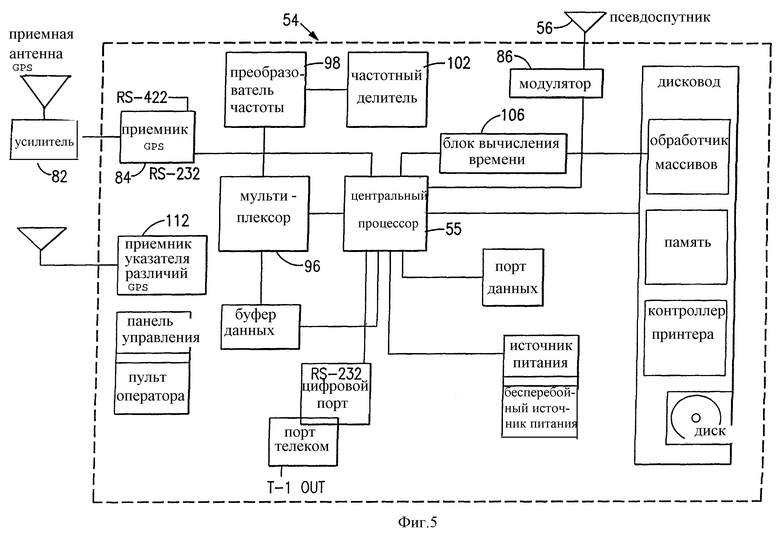
На фиг. 5 показана схема оборудования системы 54 приема и распространения. Антенна 78 используется для приема сигналов GPS 30-44. Антенна 78 соединена с усилителем 82 мощности, который используется для усиления и передачи сигналов к приемнику 84. Приемник 84 используется для селективного отбора необходимых каналов сигнала GPS для демодуляции, декодирования и вычисления времени и навигационных данных (NAVDAT). Приемник GPS 84 используется для определения положения приемной антенны 78. Центральный процессор 55 используется для управления сигналами, поступающими от мультиплексора 96, частотного преобразователя 98 и частотного делителя 102. Приемник 112 указателей различий GPS используется для вычисления различий GPS в любом варианте исполнения системы 46 внутреннего позиционирования, которая может быть в движении относительно Земли 28. Высокой степени разрешения и большой точности можно достичь при использовании различий GPS по времени. В соответствии с этим способом положения каждой системы сравниваются и сумма сравнений большего числа измерений усредняется для получения точного указателя положения.
Обработка, выполняемая центральным процессором 55 в устройстве приема и распространения 54, включает в себя вычисление и мультиплексирование смещения позиционирования, регистрацию движения и запись изменения каждого идентификатора 64 или сотового телефона 70. Обработка также содержит информацию о различии GPS, необходимую для системы 46 внутреннего позиционирования. Выполняемая программа показана на блок-схеме на фиг.6. Дополнительные аспекты фиг. 5 будут обсуждены далее совместно с фиг. 7.
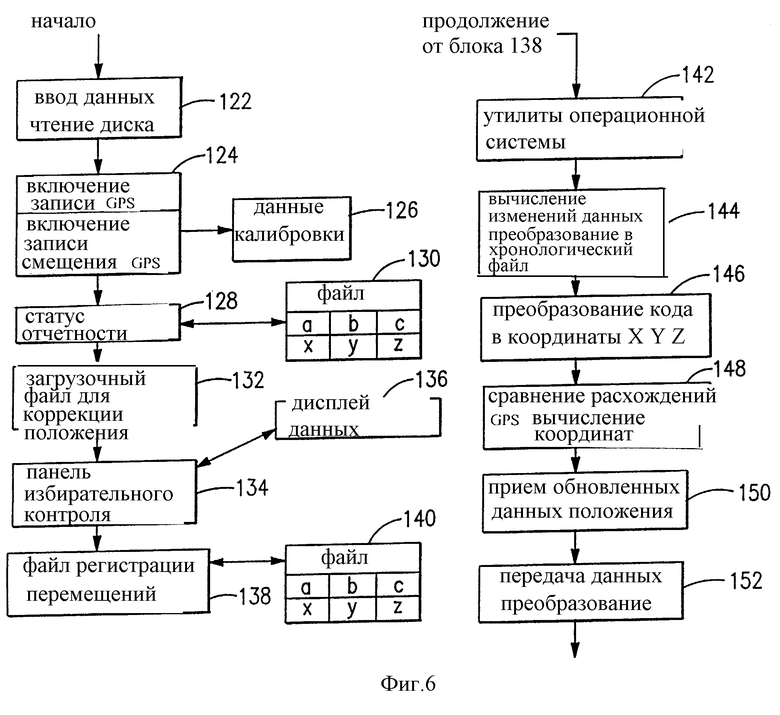
Один из вариантов выполнения программы, используемой для системы 46 внутреннего позиционирования, показан на фиг.6. Совершенно очевидно, что существуют и другие признаки и варианты программ для использования с системой 46 внутреннего позиционирования и что представленный вариант программы является чисто иллюстративным. В этом варианте исполнения обработка начинается с блока инициализации 122. Приемник GPS 84 и приемник 112 различий GPS инициализируются и калибруются в блоках 124 и 126. Блок формирования статуса отчетности 128 принимает данные статуса от приемника GPS 84 и приемника 112 различий GPS, затем преобразует данные и представляет их в виде файла, содержащего информацию, относящуюся к предыдущим файлам с записью с идентификатора 64 или сотового телефона 70. Файл 132 начальной загрузки содержит последние данные о позиционировании на момент последнего формирования отчета о статусе. Блок управления опроса 134 обеспечивает данными дисплей 136, который работает как станция наблюдения за операцией управления и наглядно представляет положение различных объектов. Блок файла признака регистрации перемещения 138 взаимодействует с блоком 140 файла для непрерывного наблюдения за положением объектов. Модуль 142 программы просмотра взаимодействует с операционной системой центрального процессора 55. Программные блоки или модули 144 и 146 ведут запись изменений в файл архива системы позиционирования 46. Этот файл архива системы предпочтительно сохраняется так, чтобы определить положение объекта. Блок 148 не обязательный и используется для обработки информации о различии GPS, получаемой с приемника 112 различий, когда требуется реализация специальной системы. Блок 150 получения новых данных получает модифицированные данные позиционирования с приемника 112 различий GPS. Блок передачи данных 152 передает обработанные данные по назначению.
На фиг. 7 показана группа спутников 16-22 с соответствующими стандартными сигналами GPS 34,36, 38 и 40, которые были описаны на фиг. 1 и 2. Каждый из спутников 16-22 постоянно передает свое закодированное сообщение. Каждый из сигналов 34-40 соответствующего спутника имеет структуру сообщения, состоящую из трех основных компонентов. Первый из трех основных компонентов это сигнал кода Приближенной Ориентации или П/О (С/А) код. Этот сигнал приближенной ориентации имеет несущую частоту 1.023 МГц, т.е. является фазомодулированным с использованием принципа бинарно-фазового смещения (BPSK) по псевдослучайному коду, присвоенному для каждого спутника 16-22. Псевдослучайный код это фиксированная последовательность двоичных битов, имеющих длину 1.023 бит. Каждый из спутников 16-22 передает сигналы, используя алгоритм присвоенного и специального кода. Такие алгоритмы кода описаны в специальной литературе по GPS.
Второй из трех основных компонентов стандартного сигнала GPS это сигнал точного хода. Точный сигнал является BPSK-модулированным на частоте 10.23 МГц. В основе точного сигнала используется псевдослучайный код и подобно С/А код является данными идентификации спутника значительно большей продолжительности.
И наконец, третий основной компонент GPS-сигнала это данные спутника. Эти данные модулируют Точный код и Приближенную Ориентацию с частотой 50 бит в секунду, также используя BPSK-модуляцию. Данные спутника включают различную информацию, наиболее существенной является астрономические координаты для каждого спутника GPS. Астрономические координаты описывают орбитальную траекторию спутника в формате, определяемом Инерциальной Координатной Системой. Инерциальная Координатная Система базируется на Центре тяжести Земли (COG), в которой Северный географический полюс определяет ось Z через центр тяжести Земли, а плоскость географического экватора перпендикулярна оси Z и пересекает центр тяжести Земли. Параметры орбиты спутника определяются в виде подъема, наклона, параметра перигея, удаления от полуосей, эксцентриситета, а также параметров времени и главной аномалии. Хронологические данные спутника также включены в передаваемые данные.
Приемник GPS 84, как показано на фиг.7, вычисляет точные данные расположения, используя сигналы спутников 34-40. Приемник GPS 84 вычисляет свое местонахождение, используя данные, по меньшей мере, четырех спутников 16-22. Данные дополнительных спутников добавляются к общему массиву данных, из которых GPS может выделить минимум 4 сигнала. Приемник GPS 84 определяет псевдодиапазон для каждого спутника и представляет данные о положение в виде широты, долготы и высоты. Измерение псевдодиапазона имеют два принципиальных источника погрешностей. Ими являются временная погрешность и погрешность распостранения. Приемник GPS 84 выдает сигнал данных (NAVDAT) 164 через последовательный порт данных RS422. Сигнал данных (NAVDAT) 164 содержит данные навигации и хронологические данные GPS. Данные навигации включают широту, долготу, высоту и время суток. Хронологические данные GPS включают порядковый номер недели, бортовые данные систем спутника и хронологические астрономические данные.
Возвращаясь к фиг. 5 и 7 блок 106 восстановления тактовой синхронизации получает сигнал данных (NAVDAT) 164, содержащий сигнал приближенного времени и сигнал частотного генератора приемника. Блок 106 восстановления тактовой синхронизации выдает сигнал 166 точного времени на частоте 10.23 МГц, которое эквивалентно по точности атомным часам.
Центральный процессор 55 обрабатывает сигнал 166 точного времени и сигнал 164 данных (NAVDAT) вместе с дополнительными данными, вводимыми оператором. Эти дополнительные данные помогают скорректировать физическое отклонение при определении местонахождения каждого псевдоспутника. Одним из аспектов изобретения является передача сигнала типа GPS информации о спутнике от каждого из псевдоспутников или антенны 56-62. Так как стандартный сигнал GPS постоянно изменяется из-за изменения информации об орбите каждого псевдоспутника вокруг Земли, то антенны считаются антеннами "псевдоспутников". Физическое отклонение и временное отклонение, которые детально раскрыты на фиг. 10, вводятся в центральный процессор 55. Сигналы типа GPS 168, 170, 172 и 174 являются сигналами кода приближенной ориентации кода, точной ориентации и данными спутника для "псевдоспутников" 56, 58, 60 и 62 соответственно. Модулятор 86 объединяет эти сигналы, используя BPSK-модуляцию, и генерирует несущую RF. Сигналы 176, 178, 180 и 182 данных псевдоспутников являются задающими сигналами для псевдоспутников 56, 58, 60 и 62.
Блок 106 восстановления тактовой синхронизации, описанный в настоящем изобретении, представлен более детально на фиг, 8. Блок 106 восстановления тактовой синхронизации получает сигнал данных (NAVDAT) 164 от приемника GPS 84. Блок 106 восстановления тактовой синхронизации выдает сигнал точного времени 166, который эквивалентен по точности атомным часам. Блок 106 синхронизации тактовой частоты обеспечивает частоту 10.23 МГц, используя обычную схему фазовой синхронизации. Многие коммерчески доступные устройства GPS обеспечивают функции, требуемые для блока 106 восстановления тактовой синхронизации. Например, устройство Hewlett Packard 58503A обеспечивает сигнал 166 точного времени.
На фиг. 9 представлено детально устройство модулятора 86. Центральный процессор 55 выдает на выходе сигналы GPS 168, 170, 172 и 174, которые содержат код приближенной ориентации, код точной ориентации, данные спутника и сигнал точного времени 166. Сигнал точного времени 166 усиливается в 154 раза в усилителе 184, чтобы получить высокочастотный сигнал 186. P-код, код данных спутника и код приближенной ориентации обрабатываются в логическом устройстве Исключающее-ИЛИ 190 для формирования на выходе сигналов BPSK 192 и 194. Выходной сигнал BPSK 192 и высокочастотный сигнал 186 суммируются в RF модуляторе 196 и формируют на выходе сигнал 198. Выходной сигнал BPSK 194 и центральная часть фазосмещенного сигнала 184 суммируются в RF модуляторе 197 и формируют на выходе сигнал 200. Как показано на фиг.9, сигналы 198 и 200 суммируются и формируют задающий сигнал 176 данных "псевдоспутника", соответствующий псевдоспутнику 56. Данные спутника, содержащиеся в сигнале GPS, содержат астрономические данные, которые описывают траекторию "псевдоспутника" в формате, доступном для приемника стандартных GPS для дальнейших вычислений. И, наконец, данные спутника содержат дополнительно специальную информацию, необходимую для специальных систем.
На фиг. 10 представлен пример системы 46 внутреннего позиционирования.
Пример 1. На фиг. 10 представлен пример системы 46 внутреннего позиционирования в условном помещении 204 шириной 200 м, длиной 300 м и высотой 20 м. Это условное помещение 204 имеет стены, параллельные северу, югу, западу и востоку, где используется система 46 внутреннего позиционирования с коаксиальным кабелем со скоростью пропускания 0.6. В этом примере коэффициенты широты, долготы и высоты для псевдоспутников 56, 58, 60 и 62 так же, как временная задержка, являются вычисляемыми значениями. Псевдоспутник 56 находится в 5 метрах к югу от системы 54 приема и передачи в верхней части юго-западного угла помещения 204 и на одной высоте с системой 54 приема и передачи GPS. Псевдоспутник 58 расположен на расстоянии 295 метров к северу от системы 54 приема и распределения GPS и на 20 м ниже ее. Коаксиальный кабель, пристыкованный к псевдоспутнику 58, имеет длину 315 м. Псевдоспутник 60 находится на расстоянии 295 метров к северу, 200 метров к востоку и на той же высоте, что и система 54 приема и распределения GPS. Псевдоспутник 60 соединен с системой 54 приема и распределения GPS коаксиальным кабелем длиной 495 метров. Псевдоспутник 62 находится на расстоянии 5 метров к югу, 200 метров к востоку и на 20 метров ниже системы 54 приема и распределения GPS. Псевдоспутник 62 соединен коаксиальным кабелем длиной 225 метров. Длина кабеля 206 антенны не влияет на работу системы 46 внутреннего позиционирования, потому что результирующее расхождение времени, возникающее на каждом канале, исключается. Таким образом NAVDAT приемника GPS (фиг. 5) имеет правильное расположение антенны. Так как приемник GPS 84 расположен непосредственно под антенной 78, то не требуется никакой коррекции по широте или долготе. Вследствие того, что антенна 78 установлена на 30 метров выше по высоте над системой 54 приема и распределения GPS, то для каждого псевдоспутника 56, 58, 60 и 62 вводится фиксированное отклонение по высоте 30 метров. Координаты трех измерений псевоспутников 56, 58, 60 и 62 выражаются в виде широты, долготы и высоты по отношению к антенне 78. Эти расстояния легко измеряются. Угловые отклонения используются для вычисления параметров орбиты, которые включены в данные спутника, передаваемые от псевдоспутников 56-62. Эти угловые отклонения вычисляются при помощи угловых преобразований. Далее временная задержка вычисляется с учетом длины кабеля и коэффициента распространения. Временная задержка используется для контроля времени, которую компьютер передает каждой системе отсчета данных. Например, временная задержка для 200-метрового коаксиального кабеля больше, чем для 100-метрового коаксиального кабеля того же типа. В этом случае центральный процессор 55 передает данные системы отсчета для 200-метрового кабеля немного раньше, чем для 100-метрового. Центральный процессор 55 осуществляет контроль времени и вычисление временной задержки для каждого элемента коаксиального кабеля. В таблице представлены характерные отклонения для условного помещения 204 на фиг. 10.
Основываясь на этих отклонениях, компьютер формирует при помощи специального способа параметры для каждого псевдоспутника 56, 58, 60 и 62. Этот способ включает следующие шаги:
1. конвертацию данных широты, долготы, высоты и времени в астрономический формат данных для системы внутреннего позиционирования;
2. запись данных в регистры памяти для формирования выходных данных задержки;
3. присваивание номеров псевдослучайного кода и вычисление параметров орбиты;
4. добавление требуемых каждым обычным приемником других сформированных данных системы внутреннего позиционирования, включая телеметрию, статус состояния; и
5. присваивание дополнительных данных для каждого статуса состояния псевдоспутника, требуемых для работы приемника.
Рассмотрим другой вариант системы 46 внутреннего позиционирования, представленный на фиг. 11. В этом варианте отсутствуют приемник GPS 84, приемная антенна GPS 78 и усилитель мощности 82. Вместо использования стандартных сигналов GPS 30-44 координаты каждого псевдоспутника 56, 58, 60 и 62 вводятся непосредственно в центральный процессор 55 в виде широты, долготы и высоты. Эти данные могут быть получены путем внешних измерений. Блок 106 восстановления тактовой стабилизации можно заменить данными точного времени. Можно использовать показания атомных часов, времени WWV или время Военно-морской обсерватории США. В данном варианте без приемника GPS 84 оператор компьютера вводит координаты непосредственно в центральный процессор 55. Остальная работа центрального процессора 55 и псевдоспутников 56-62 такая же, как описано выше.
Следует иметь ввиду, что настоящее изобретение не ограничено рассмотренными вариантами применения. Скорее, имея ввиду рассмотрение представленных примеров как варианты лучшего применения изобретения, многие вариации использования изобретения являют попытки усовершенствованного применения, не меняя цели и духа изобретения. Цель изобретения четко описана в формуле изобретения. Все изменения, модификации и вариации, возможные в рамках описания, формулы изобретения, считаются подпадающими под эту формулу.





Система определения положения для локализации объектов в местах, куда сигналы Глобальной Навигационной Системы (GPS) не проникают. В первом варианте исполнения представлены приемник GPS и блок восстановления тактовой синхронизации. Компьютер получает данные о положении объекта и точное время. Компьютер вычисляет новые орбитальные данные для, по меньшей мере, четырех псевдоспутников. Псевдоспутники являются антеннами, установленными внутри замкнутого или экранированного пространства и посылающими данные к приемнику. Во втором варианте исполнения данные о положении псевдоспутников вводятся в компьютер без GPS-приемника. При этом используется сигнал точного времени. Компьютер вычисляет орбитальные данные для каждого псевдоспутника и передает сигнал времени и астрономические координаты для каждого псевдоспутника. Во временной сигнал вводится задержка, учитывающая для каждого спутника задержку распространения из-за разной длины соединительного кабеля. Достигаемым техническим результатом является усовершенствование систем позиционирования и определения положения. 4 с. и 6 з.п. ф-лы, 11 ил., 1 табл.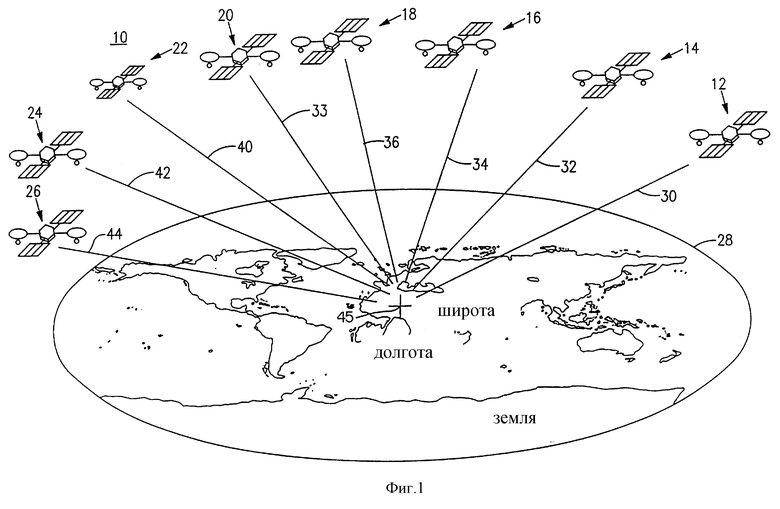
| US 5311185 А, 10.05.1994 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ФИЛЬТРАЦИИ И ВОДООТДАЧИ ГРУНТА В ПОЛЕВЫХ УСЛОВИЯХ | 1991 |
|
RU2012866C1 |
| RU 94018148 С1, 20.03.1996 | |||
| EP 0665517 А3, 08.01.1997 | |||
| Счетчик ледяных ядер | 1978 |
|
SU679904A1 |
