Изобретение относится к технологии каротажа для измерения физических свойств подземных формаций, в частности к способу каротажа и системе с использованием акустических волн.
При осуществлении разведки подземных ресурсов, в частности содержащих нефть и природный газ, обычно используют технологию каротажа, состоящую в том, что в земле бурят скважину, размещают в ней измерительное устройство, известное как скважинный прибор или зонд, способное перемещаться внутри скважины вверх и вниз, и обрабатывают измеренный сигнал скважинного прибора в устройстве обработки, расположенном на поверхности и связанном со скважинным прибором посредством каротажного кабеля. Известен также акустический каротаж, при котором определяют скорость распространения звука через подземную формацию, используя при этом генератор акустических волн и приемник, установленные в скважинном приборе. См., например, Джей Титтаман, "Геофизические исследования в скважинах", Академик Пресс, Инк., и "Иллюстрация физических исследований", 1989, Физикл Эксплорейшн Сесайети.
При традиционном акустическом каротаже акустическую волну в форме импульса выдают акустическим генератором и передают в землю, а акустическую волну, прошедшую через землю, обнаруживают приемником и в аналоговой форме передают по каротажному кабелю в наземное устройство обработки, которое обрабатывает аналоговый сигнал, чтобы определить время поступления акустической волны в приемник. Но из-за ненадежности аналоговых данных, принятых после передачи по длинному каротажному кабелю, в последнее время было предложено преобразовывать аналоговый сигнал в цифровой в скважинном аппарате, а затем передавать цифровой сигнал в наземное устройство обработки для необходимой обработки (см., например, А.Р. Харрисон, С.Дж. Рендел, Дж.Б. Эрон, С. Ф. Моррис, А.Х. Уинднелл, Р.А. Двурак, Л.Л. Ралледж, и Дж.Д. Перкинс, "Прием и анализ акустических сигналов из скважинного несимметричного и дипольного источника для определения скоростей сжатия и сдвига и их взаимосвязи с механическими свойствами породы и поверхностными сейсмическими данными", СПЕ 20557, 1990, сентябрь 23-26, Новый Орлеан, 65-я ежегодная техническая конференция и выставка). Однако, как показано на фиг.3 и 4 указанного источника информации (СПЕ 20557), в наземное устройство обработки передают для анализа весь цифровой сигнал, превышающий заданное пороговое значение. При этом на поверхность передают огромный объем цифровых данных и требуется широкая полоса частот для телеметрии. Кроме того, передают даже те данные, которые не являются необходимыми для акустического каротажного анализа, что снижает эффективность работы. И поскольку большой объем данных передают по длинному каротажному кабелю, существует вероятность ошибок при передаче.
Предлагаемые способ и система для акустического каротажа позволяют преодолеть описанные выше недостатки существующего уровня техники. Это обеспечивается за счет сокращения объема цифровых данных, подлежащих передаче в наземное устройство обработки, уменьшения ширины полосы частот, необходимой для телеметрии, и снижения вероятности ошибок в данных, что повышает надежность системы.
Согласно одному аспекту изобретения предложен способ акустического каротажа для определения характеристик формаций, через которые проходит скважина, с использованием скважинного прибора, выполненного с возможностью перемещения вверх и вниз по скважине и соединенного с наземным устройством обработки посредством каротажного кабеля, причем прибор снабжен по меньшей мере одним генератором акустических волн и по меньшей мере одним приемником, расположенными на расстоянии друг от друга, а также скважинным устройством обработки, связанным с генератором и приемником, и с наземным устройством обработки посредством каротажного кабеля. Указанный способ, заключающийся в том, что сначала соответствующим образом размещают скважинный прибор в скважине, а затем генератором акустических волн вырабатывают и затем принимают акустическую волну, отличается тем, что
(1) обрабатывают сигнал обнаружения, полученный из приемника, скважинным устройством обработки для определения времени поступления акустической волны в приемник, и
(2) передают определенное таким образом время поступления в наземное устройство обработки по каротажному кабелю.
Согласно другому аспекту изобретения предложен скважинный прибор для акустического каротажа, предназначенный для использования в способе определения характеристик скважины, содержащий
по меньшей мере один генератор акустических волн, и
по меньшей мере один приемник, выполненный с возможностью приема акустической волны после того, как она прошла через подземную формацию или обсадную трубу скважины,
отличающийся тем, что содержит устройство управления, предназначенное для управления выработкой и приемом акустической волны, причем устройство управления содержит
аналого-цифровой преобразователь для преобразования сигнала обнаружения, полученного от приемника, в цифровую форму с заданным интервалом дискретизации,
первую память для сохранения преобразованного таким образом в цифровую форму сигнала,
вторую память для хранения заданной программы обработки таким образом сохраненного преобразованного в цифровую форму сигнала, и
микропроцессор для исполнения программы, хранящейся во второй памяти, позволяющей при обработке преобразованного в цифровую форму сигнала, сохраненного в первой памяти, определить время поступления акустической волны, выработанной генератором и поступившей в приемник.
Согласно следующему аспекту изобретения предложена система для акустического каротажа с централизацией наземного устройства обработки и скважинного прибора для акустического каротажа, описанного выше.
В акустическом каротаже обычно используют акустический сигнал со средней частотой несущей 15 КГц и длиной волны 2,5 м. После его дискретизации с 16-битным разрешением получается 250•16=4 кбт данных. При обычном цифровом акустическом каротаже этот объем цифровых данных передают в наземное устройство обработки по каротажному кабелю с помощью телеметрической связи и обрабатывают в нем для определения времени поступления и амплитуды Р волны (волны сжатия). Но для акустического каротажа необходимо, в основном, только время поступления и амплитуда Р волны, а остальные данные цифрового сигнала требуются редко или вообще не требуются. Объем действительно необходимых данных после дискретизации составляет всего 2•16 бит=32 бита. Таким образом, из приведенного выше простого примера ясно, что если выполнять обработку дискретного сигнала в самом скважинном приборе и передавать в наземное устройство обработки только полученные время поступления и амплитуду, то объем данных, передаваемых по каротажному кабелю, можно сократить в сто и более раз, что существенно повысит эффективность передачи и снизит вероятность ошибок. Кроме того, увеличится время незанятости каротажного кабеля, что позволит использовать его для каких-либо иных целей. Настоящее изобретение было создано в основном для решения этих задач.
Несмотря на то, что в основу изобретения положена задача определения в скважине времени поступления акустического сигнала и/или его амплитуды и передачи результата на поверхность, оно также позволяет, а в ряде случаев это является предпочтительным, передавать в наземное устройство обработки не весь цифровой сигнал, а только его избранную часть. Как будет пояснено более подробно ниже, преимущество такой избирательной передачи цифрового сигнала заключается в том, что можно подтвердить надежность данных (посредством выполнения повторной обработки в наземном устройстве обработки).
В дальнейшем изобретение пояснено описанием примеров его осуществления со ссылкой на прилагаемые чертежи, на которых
фиг.1 - схема системы акустического каротажа, выполненной в соответствии с одним вариантом осуществления изобретения,
фиг.2(1) и (2) - схемы расстановки акустического передатчика и приемников в предложенном скважинном приборе для акустического каротажа,
фиг. 3 - структурная схема одного варианта осуществления скважинного устройства обработки, предусмотренного в предложенном скважинном приборе для акустического каротажа,
фиг. 4 - алгоритм программы обнаружения на основе одного варианта осуществления предложенного способа акустического каротажа,
фиг. 5 (а) и (b) - цифровые сигналы соответственно для скважин с необсаженным и обсаженным стволом,
фиг.6 (а) и (b) - способ нахождения порога при проведении соответственно аналогового и цифрового акустического каротажа,
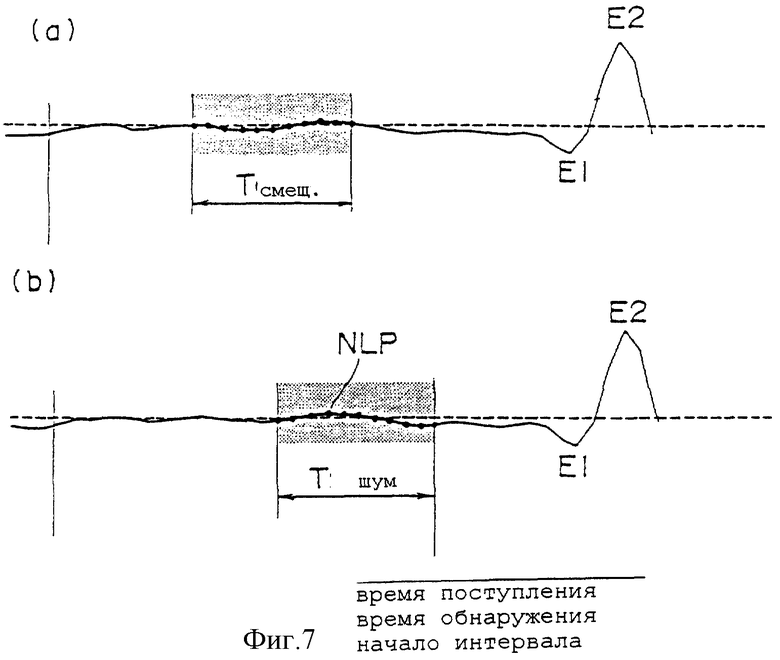
фиг. 7 (а) и (b) - соответственно временной интервал измерения смещения постоянного тока и временной интервал измерения помех,
фиг. 8 - время начала временного интервала определения времени поступления и временного интервала измерения пиковой амплитуды,
фиг. 9 - взаимосвязь между нахождением низкого и высокого порога и нахождением пиковой амплитуды,
фиг. 10 (а), (b), (с) - процедура нахождения высокого порога с использованием интерполяционной обработки,
фиг.11 - способ определения пиковой амплитуды с помощью квадратичной интерполяции при использовании параболической кривой.
Условные обозначения
1 - скважинный прибор
2 - каротажный кабель
3 - наземное устройство обработки
4 - скважина
8 - скважинный блок обработки
12с - АЦП
13а - процессор цифровых сигналов
13с - телеметрический интерфейс
13d - память программ
Tt - время поступления
Т0 - время возбуждения акустической волны
Td - время начала обнаружения
Тр - время предыдущего поступления
Тнт - время поступления высокого порога
ТLT - время поступления низкого порога
E1 - первый пик
Е2 - второй пик
На фиг.1 схематически изображена система акустического каротажа, выполненная в соответствии с одним вариантом осуществления настоящего изобретения. Как видно на фиг.1, эта система включает в себя скважинный прибор (также именуемый зондом) 1, способный перемещаться вверх и вниз в скважине 4, пробуренной в земле. Скважинный прибор 1 имеет удлиненную форму, и на наружной поверхности его корпуса установлены акустический передатчик Т и два приемника R1 и R2, расположенные на определенном расстоянии друг от друга по вертикали и также удаленные от передатчика Т на определенное расстояние по вертикали. Внутри корпуса скважинного прибора 1 герметично заключен скважинный блок 8 обработки. Пример конкретной конструкции скважинного блока 8 обработки будет более подробно описан ниже со ссылкой на фиг.3. Скважинный блок 8 обработки соединен с акустическим передатчиком Т и приемниками R1 и R2 посредством внутренних межсоединений (не показаны), и акустическая волна в форме импульса излучается в подземную формацию акустическим передатчиком по команде скважинного блока 8 обработки. Акустическая волна проходит через подземную формацию по скважине 4 в вертикальном направлении и принимается приемниками R1 и R2 соответственно, так что соответствующие сигналы обнаружения от приемников R1 и R2 поступают в скважинный блок 8 обработки. Таким образом, если определены соответствующие моменты времени Т1 и Т2 поступления акустической волны в соответствующие приемники R1 и R2 после излучения акустическим передатчиком Т и прохождения через подземную формацию и вычислена разность между ними, т. е. ΔT=Т1-Т2, то можно вычислить время прохождения акустической волны через подземную формацию на вертикальное расстояние между двумя приемниками R1 и R2. Соответственно, из этого вертикального расстояния и времени прохождения можно вычислить скорость акустической волны, которая прошла через подземную формацию. И поскольку время прохождения акустической волны зависит от структуры подземной формации, такую структуру можно проанализировать.
Следует отметить, что скважина 4, показанная на фиг.1, является скважиной с необсаженным стволом, в которой стенка скважины 4 образована подземной формацией. В этом случае после обнаружения акустической волны, которая прошла через подземную формацию, можно, в основном, проанализировать структуру подземной формации. Однако можно использовать и скважину с обсаженным стволом, в которой к поверхности стенки скважины 4 пригнана цилиндрическая обсадная труба. При наличии обсадной трубы, поскольку акустическая волна проходит через нее, первой акустической волной, поступившей в приемник, будет волна, прошедшая через обсадную трубу. В этом случае, измерив амплитуду первой Р волны, можно рассчитать цементирование между обсадной трубой и подземной формацией, условия соединения между сегментами обсадной трубы и т.п. В частности, поскольку при акустическом каротаже скважинный прибор 1 желательно разместить по оси скважины 4, в варианте, показанном на фиг.1, установлены центрирующие элементы 1a, 1a в соответствующих местах верхней и нижней части скважинного прибора 1. Следует отметить, что при перемещении скважинного прибора 1 вверх и вниз по скважине 4 центрирующие элементы 1а предпочтительно убирать (отводить).
Верхняя часть скважинного прибора 1 соединена с каротажным кабелем 2, так что скважинный прибор подвешен на каротажном кабеле 2. Каротажный кабель 2 не только механически удерживает скважинный прибор 1 в подвешенном состоянии, но также содержит в себе линии передачи (не показаны), чтобы обеспечить электрическую или оптическую передачу сигналов к скважинному блоку 8 обработки. Каротажный кабель 2 намотан на барабан 6, расположенный на поверхности 5 земли, и присоединен к удлинителю каротажного кабеля 2' на центральном валу барабана 6, а удлинитель 2' каротажного кабеля присоединен к наземному устройству 3 обработки, которое обычно содержит компьютер.
На фиг.2 показано несколько примеров расположения акустических передатчиков и приемников скважинного прибора, выполненного в соответствии с другим вариантом осуществления изобретения. Если в варианте на фиг.1 предусмотрен только один акустический передатчик Т и два приемника R1 и R2, то в скважинном приборе 1, представленном на фиг.2(1), имеются два акустических передатчика UT и LT и два приемника R1 и R2. В этом случае акустическая волна, излученная из верхнего акустического передатчика UT, поступает в два приемника R1 и R2 соответственно в моменты времени поступления ТТ1 и ТТ2, а акустическая волна, излученная нижним акустическим передатчиком LT, поступает в два приемника R1 и R2 в моменты времени поступления ТТ3 и ТТ4 соответственно. В скважинном приборе 1", представленном на фиг.2(2), две пары приемников R1 и R3 и R2 и R4 расположены между двумя акустическими передатчиками UT и LT. Акустическая волна с верхнего акустического передатчика UT поступает в пару приемников R2 и R4 соответственно в моменты времени поступления ТТ2 и ТТ1, а акустическая волна из нижнего акустического передатчика LT поступает в другую пару приемников R1 и R3 соответственно в моменты времени поступления ТТ3 и ТТ4. Таким образом, конструкция, в которой акустические волны от разных акустических передатчиков обнаруживают на одном и том же участке формации, позволяет повысить надежность данных и производить детальный анализ подземной формации.
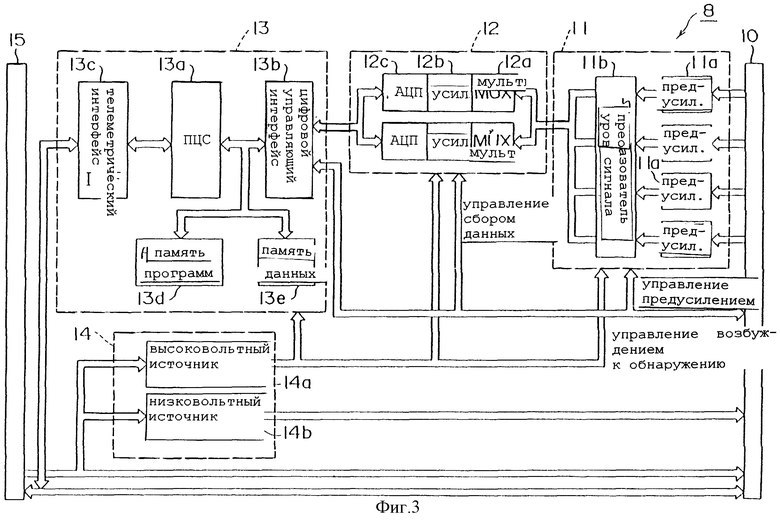
На фиг.3 представлена подробная структурная схема варианта осуществления скважинного блока 8 обработки, находящегося в скважинном приборе 1. Скважинный блок 8 обработки содержит нижний соединитель 10, который электрически подключен к акустическому передатчику Т и приемникам R1 и R2 скважинного прибора 1. В варианте, представленном на фиг.1, поскольку скважинный прибор 1 содержит два приемника R1 и R2, они соединены с нижним соединителем 10 и с соответствующими предусилителями 11а в предусилительной секции 11. При этом акустический передатчик Т также соединен с нижним соединителем таким образом, чтобы сигнал управления возбуждением для возбуждения (излучения) акустической волны посредством активизации акустического передатчика Т поступал в акустический передатчик Т, и высокое напряжение для возбуждения акустической волны поступало с высоковольтного источника 14b секции 14 источника питания в акустический передатчик Т. Кроме того, из акустического передатчика Т поступает сигнал определения времени Т0 возбуждения акустической волны. В предусилительной секции 11 также предусмотрен преобразователь 11b уровня сигнала, который соединен с соответствующими предусилителями 11а. Этот преобразователь 11b уровня сигнала можно использовать как блок регулировки усиления, если скважинный прибор 1 имеет два канала.
Предусилительная секция 11 соединена посредством шины с секцией 12 сбора данных, имеющей два параллельных тракта, каждый из которых содержит мультиплексор 12 а, усилитель (содержащий фильтр для устранения эффекта наложения спектров) 12b и аналого-цифровой преобразователь 12с. Секция 12 сбора данных соединена шиной с управляющей секцией 13. Управляющая секция 13 содержит процессор 13а цифровых сигналов (ПЦС), цифровой управляющий интерфейс 13b, телеметрический интерфейс 13с, память 13d программ и память 13е данных, которые соединены посредством шин друг с другом и с ЦПС 13а в центре. Хотя в этом варианте осуществления используют ПЦС 13а марки ADSP-2101, поставляемый компанией Analog Devices, Inc., изобретение не ограничено применением только этого конкретного процессора и можно использовать любые другие универсальные микропроцессоры, микроконтроллеры или т.п. Память 13d программ может быть реализована в виде одного или нескольких обычных энергонезависимых запоминающих устройств, таких как ПЗУ, ППЗУ, ЭСПЗУ и ЭППЗУ. В частности, следует отметить, что программу акустического каротажа (например, программу цифрового обнаружения первого поступления или ЦОПП) для реализации разных уникальных функций акустического каротажа согласно изобретению, которые будут описаны ниже, хранят в этой памяти 13d программ. Это значит, что сигналы обнаружения от приемников R1 и R2 преобразуют в цифровую форму в АЦП 12с и полученные цифровые сигналы сохраняют в памяти 13е данных, так что ПЦС 13а может обрабатывать цифровые сигналы, сохраненные в памяти 13е данных, в соответствии с программой акустического каротажа, хранящейся в памяти 13d программ, чтобы определить таким образом время поступления, амплитуду или т.п. первой Р волны. Следует также отметить, что память 13е данных выполнена в форме ЗУПВ для хранения рабочих данных. Цифровой управляющий интерфейс 13b отвечает за синхронизацию и управление ею в предусилительной секции 11, секции 12 сбора данных и акустическом передатчике Т. Кроме того, следует отметить, что в альтернативном варианте осуществления изобретения процессор 13а и память 13d программ могут быть реализованы встроенными программно-аппаратными средствами, например логическими схемами, вместо микропроцессора.
Управляющая секция 13 соединена с верхним соединителем 15 посредством шины, а верхний соединитель 15 соединен с телеметрическим картриджем (не показан), который в свою очередь соединен с одним концом каротажного кабеля 2. Таким образом, ПЦС 13а может осуществлять двусторонний обмен данными с наземным устройством 3 обработки посредством телеметрической связи через каротажный кабель 2. Кроме того, в секции 14 источника питания предусмотрен низковольтный источник 14а для подачи энергии в предусилительную секцию 11, секцию 12 сбора данных и управляющую секцию 13.
Далее со ссылкой на фиг.4-11 будут подробно описаны особенность функции акустического каротажа скважины и предложенный способ. На фиг.4 представлен алгоритм программы ЦОПП (цифрового определения первого поступления) для определения времени поступления и амплитуды в скважине, т.е. внутри буровой скважины, в рамках предложенной программы акустического каротажа, хранящейся в памяти 13d программ, показанной на фиг.3. Следует отметить, что программа ЦОПП, представленная на фиг.4, является только частью акустического каротажа согласно изобретению. Последовательность скважинного акустического каротажа в соответствии с настоящим изобретением содержит следующие четыре программы:
(1) программу активизации акустического передатчика,
(2) программу сбора данных и преобразования их в цифроровую форму,
(3) программу ЦОПП,
(4) телеметрическую передачу результатов ЦОПП в наземное устройство обработки.
Таким образом, согласно последовательности акустического каротажа скважины в соответствии с настоящим изобретением, в первую очередь в программе (1) ПЦС 13а подает в акустический передатчик Т команду на излучение акустической волны в соответствии с программой акустического каротажа в памяти 13d программ. Затем, в программе (2) ПЦС 13а определяет время Т0 возбуждения акустической волны и производит выборку сигналов обнаружения с приемников R1 и R2 с заданным интервалом дискретизации (например, 10 микросекунд) и преобразует их в цифровую форму в АЦП 12с. Полученный цифровой сигнал запоминают в памяти 13е данных. Следует отметить, что если при выполнении программ (1) и (2) возникает необходимость использовать данные, хранящиеся в ЦОПП, то вызывают программу ЦОПП. После этого вступает в действие программа ЦОПП (фиг. 4), которая обрабатывает цифровой сигнал, сохраненный в памяти 13е данных, чтобы определить время поступления и/или амплитуду первой Р волны в цифровой форме. После этого процесс переходит к программе (4), в которой определенные таким образом время поступления и/или амплитуду помещают в телеметрический кадр, который в свою очередь передают в наземное устройство 3 обработки через телеметрический интерфейс 13с или оставляют в резервном состоянии до тех пор, пока он не заполнится. Описанную выше последовательность акустического каротажа скважины выполняют многократно на разной глубине в скважине 4 при перемещении скважинного прибора 1 вдоль скважины 4 для получения каротажных данных в продольном направлении скважины.
В дальнейшем со ссылкой на алгоритм, представленный на фиг.4, будут подробно описаны отдельные программы для определения времени поступления и амплитуды первой Р волны из цифрового сигнала в программе ЦОПП.
Как было описано выше, как только цифровой сигнал, который получен путем выборки с заранее заданными усилением и интервалом дискретизации (например, 10 мкс) после возбуждения акустической волны и преобразования данных выборки в цифровую форму (например, каждая выборка может быть представлена 16-битным целым значением), сохранен в памяти 13е данных, ПЦС 13а на этапе 20, представленном на фиг.4, вызывает программу ЦОПП, хранящуюся в памяти 13 программ.
Хотя это и не показано в алгоритме на фиг.4, в данном варианте осуществления в начале ЦОПП прежде всего определяют, в зависимости от вида скважины 4, следует ли инвертировать цифровой сигнал. Как было отмечено выше, скважина 4 может быть двух типов, т.е. скважиной с необсаженным стволом, показанной на фиг. 1, или скважиной с обсаженным стволом, поверхность стенки которой закрыта цилиндрической обсадной трубой. Следовательно, конфигурация и обработка обнаруженного сигнала зависит от того, к какому из этих двух типов относится скважина 4. Если это скважина с необсаженным стволом, определяют время поступления первой Р волны, которая прошла через подземную формацию по скважине и была обнаружена соответствующими приемниками, и на основе определенного таким образом времени поступления вычисляют скорость прохождения акустической волны или наоборот - ее медленность. Такие параметры, как скорость прохождения акустической волны и медленность, зависят от структуры подземной формации, так что структуру подземной формации (например, наличие нефти или т.п.) можно проанализировать, отобразив эти параметры в продольном направлении скважины. Что касается скважины с обсаженным стволом, то в ней определяют, в основном, амплитуду первой Р волны, которая прошла через обсадную трубу, а затем на основании величины амплитуды вычисляют прочность связи (показатель связи) или степень цементирования между обсадной трубой и земной формацией. Чем выше прочность связи между обсадной трубой и окружающей ее земной формацией, тем больше утечка акустической энергии в окружающую земную формацию и тем меньше амплитуда первой Р волны, обнаруженной приемником R.
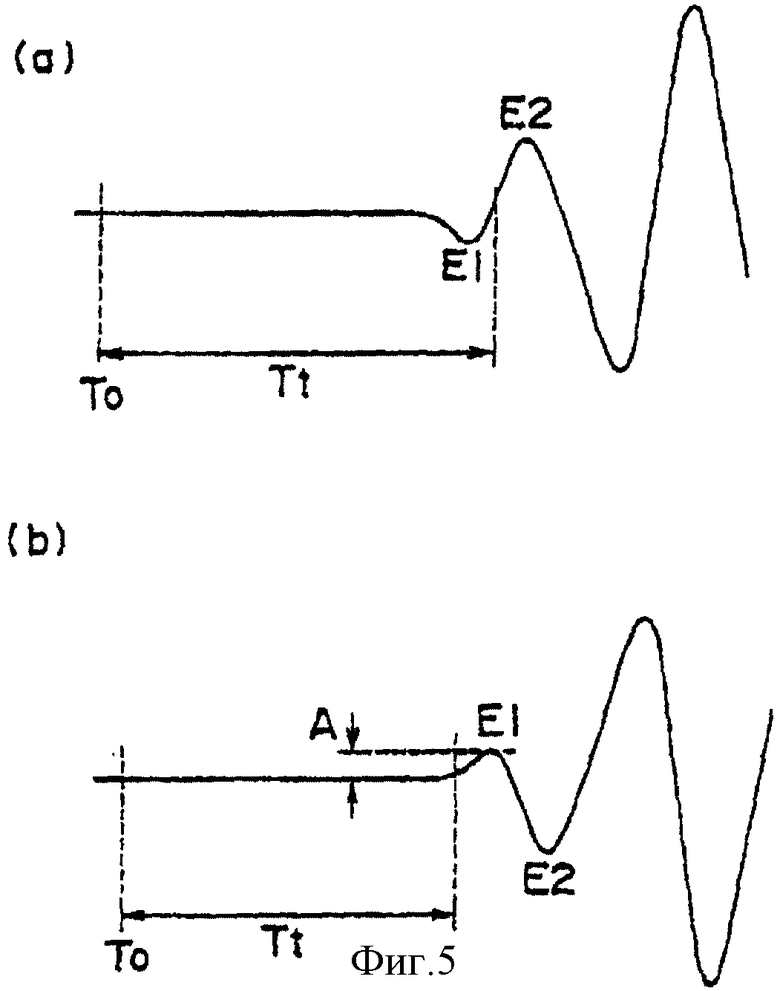
Как показано на фиг.5(а), поскольку при каротаже скважины с необсаженным стволом время поступления Т принято определять не по первому пику Е1, а по второму пику Е2 Р волны, полярность обнаруженного цифрового сигнала инвертируют. Следует отметить, что хотя цифровой сигнал фактически состоит из отдельных дискретных значений данных, разнесенных между собой на интервал дискретизации, для удобства он показан как плавная и непрерывная кривая. Как было отмечено выше. Т0 показывает время возбуждения акустической волны. С другой стороны, как показано на фиг.5(b), поскольку при каротаже скважины с обсаженным стволом принято определять амплитуду А по первому пику Е1, полярность цифрового сигнала в этом случае не инвертируют. Так как второй пик Е2 имеет полярность, противоположную первому пику Е1, при использовании предложенной программы ЦОПП в обоих типах скважин необходимо инвертировать полярность данных цифрового сигнала, когда время поступления Т определяют по второму пику Е2. Таким образом, если обработку выполняют программой ЦОПП с инвертированием полярности данных цифрового сигнала, то необходимо произвести обратное инвертирование данных цифрового сигнала после обработки программой ЦОПП, чтобы вернуться к исходному состоянию. Следует отметить, что поскольку в данном варианте время поступления Т определяют по второму пику Е2 при каротаже скважины с необсаженным стволом, необходимо инвертировать полярность цифрового сигнала, но если определяют время поступления Т по первому пику E1 даже в скважине с необсаженным стволом, тогда отсутствует необходимость инвертирования полярности цифрового сигнала.
После этого, на этапе 21, представленном на фиг.4, измеряют смещение постоянного тока. Эта операция заключается в установлении нулевого уровня базовой линии сигнала, т.е. уровня обнаружения при условии, когда в приемник R еще не пришло ни одной акустической волны. Согласно изобретению цифровой сигнал получают посредством преобразования сигнала обнаружения в цифровую форму в АЦП 12с в скважинном приборе 1, но базовая линия цифрового сигнала не обязательно точно согласуется с нулевым уровнем в выходном сигнале АЦП 12с. В частности, в данном варианте в качестве АЦП 12с используют 16-разрядный АЦП, и при этом разность особенно заметна. Таким образом, чтобы учесть разность между нулевым уровнем выходного сигнала АЦП 12с и базовой линией цифрового сигнала, эту разность необходимо измерять как смещение постоянного тока. Как показано на фиг.7 (а), интервал времени Тoff измерения смещения постоянного тока может быть установлен в произвольном месте базовой линии цифрового сигнала, однако он должен быть установлен до начала интервала определения времени поступления. В примере, представленном на фиг.7(а), интервал времени Тoff измерения смещения постоянного тока установлен на 100 мкс, а интервал дискретизации установлен на 10 мкс, поэтому показано 11 точек выборки данных. Смещение постоянного тока определяют посредством вычисления среднего значения для этих точек данных. Следует отметить, что как будет описано ниже, полученное таким образом смещение постоянного тока используют для корректировки положения порога, который необходимо использовать для определения времени Тt поступления, а также для корректировки измеренного значения пиковой амплитуды.
Затем на этапе 22, представленном на фиг.4, измеряют шум. При измерении шума определяют амплитуду максимального положительного пика шума в базовой линии цифрового сигнала до начала интервала времени определения времени появления. Определенную таким образом максимальную амплитуду шума используют для установки уровня шума в амплитуде первой Р волны, которая будет определена впоследствии, и для оценки определенной таким образом амплитуды Р волны. Предпочтительно, например, чтобы при заданных промежуточном и высоком пороге шума определенная таким образом максимальная амплитуда шума была классифицирована посредством определения, является ли этот уровень низким уровнем шума, промежуточным уровнем шума или высоким уровнем шума, и затем была использована для оценки результата, полученного в этой программе, на этапе оценки 30, который является последним этапом программы. В варианте, представленном на фиг.7 (b), измерение шума задают таким образом, что интервал Тnoise обнаружения шума заканчивается на начале интервала времени определения времени поступления, и поскольку имеется 11 точек выборки с интервалом 10 мкс, его устанавливают на 100 мкс. При этом, при измерении шума в этом интервале времени обнаружения шума определяют максимальный положительный пик NLP. В этом случае пик шума определяют, например, посредством нахождения максимальной положительной амплитуды, у которой и предыдущая и последующая соседние точки выборки имеют меньшую амплитуду. Интервал обнаружения шума может быть задан с произвольной длительностью в произвольном месте на базовой линии в зависимости от разных условий, поскольку он предшествует началу интервала времени определения времени поступления.
Затем на этапе 23, представленном на фиг.4, исполняют программу автоматической регулировки усиления. В этой программе, как показано на фиг.5(а), для определения времени Tt поступления первой Р волны определяют точки пересечения кривой, проходящей в положительном направлении к пику Е2 первой Р волны с заданным порогом, и время поступления определяют по времени, прошедшему от времени Т0 возбуждения акустической волны до этой точки пересечения. Причиной, по которой время поступления определяют с использованием точки пересечения с избранным порогом, а не с базовой линией цифрового сигнала или точки пересечения нулевого уровня, является то, что как было описано выше, базовая линия цифрового сигнала содержит шум и смещение постоянного тока, и могут возникать ошибки при использовании пересечения нулевого уровня с базовой линией цифрового сигнала. Поэтому, учитывая выявленный шум и смещение постоянного тока, определяют пороговый уровень и находят точки пересечения с этим порогом для определения времени поступления Tt. При этом порог определяют как заданное отношение к амплитуде пика Е2 первой Р волны. Если пороговый уровень для определения времени поступления Tt определяют как заданное отношение к пику Е2, то если значение амплитуды пика Е2 следующего цифрового сигнала отличается от значения амплитуды пика Е2 предыдущего цифрового сигнала, возникает необходимость корректировки порогового уровня, используемого для пика Е2 предыдущего цифрового сигнала, если необходимо определить время поступления Tt следующего цифрового сигнала. По этой причине автоматическая регулировка усиления определяет усиление обнаружения, которое должно быть использовано для операции обнаружения, и корректирует пороговый уровень, используя это усиление обнаружения для каждого цифрового сигнала, чтобы обеспечить определение времени поступления Tt с использованием определяемого порогового уровня с заданным отношением к пику Е2.
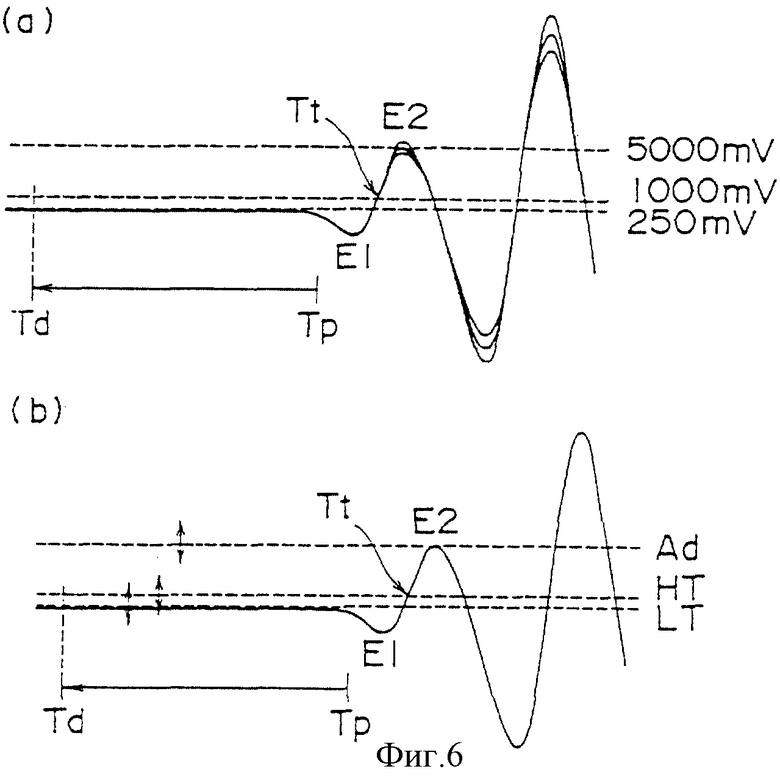
Все сказанное выше будет более подробно раскрыто со ссылками на фиг.6(а) и (b). На фиг.6(а) показаны условия, при которых определяют время поступления Tt с использованием порогового уровня при традиционном аналоговом акустическом каротаже. Когда скважинный прибор обнаруживает акустическую волну, его сигнал обнаружения поступает в наземное устройство обработки посредством телеметрической связи, и определение времени поступления производит наземное устройство обработки. Следовательно, сигнал, изображенный на фиг. 6(а), является непрерывным аналоговым сигналом. При этом Td является временем обнаружения для текущего определения времени поступления, а Тр - временем поступления, которое было определено в предыдущей операции определения времени поступления. Стрелка от Тр к Td показывает, что время начала Td текущего интервала времени обнаружения установлено раньше, чем время поступления Тр, которое было определено в предыдущей операции, на величину времени, которая была заранее выбрана или определена посредством выполнения заданного процесса. Tt - это время поступления, которое было определено при текущей обработке.
На фиг. 6(а) показан случай, в котором для сохранения амплитуды пика Е2 на уровне 5000 мВ с помощью переменного управления усилением в аналоговой системе обнаружения выполняют управление усилением. Видно, что задано два порога - высокий порог 1000 мВ и низкий порог 250 мВ. Следовательно, даже если пик Е2 следующего сигнала имеет значение амплитуды, отличное от пика Е2 предыдущего синала, установленный однажды пороговый уровень не изменяется, и поэтому определяемые время поступления и значение амплитуды пика Е2 отличаются по значению от сигнала к сигналу.
На фиг.6(b) показан принцип обнаружения согласно одному варианту осуществления изобретения. Хотя на фиг.6(b) сигнал обнаружения показан для удобства непрерывной линией, следует иметь в виду, что эта линия фактически является совокупностью отдельных точек выборки, поскольку это цифровой сигнал. На фиг.6(b) Ad является желательной пиковой амплитудой пика Е2, НТ - высоким порогом, a LT - низким порогом. Следует отметить, что желательная пиковая амплитуда Ad - это амплитуда, которая требуется для автоматической регулировки усиления как пиковая, и усиление обнаружения для следующего обнаружения корректируют на основе текущего усиления обнаружения и отношения между предыдущим Ad и предыдущей амплитудой. Остальные параметры имеют такие же значения, как на фиг.6(а). Согласно изобретению, поскольку обработка происходит в скважинном приборе, оператор не может регулировать коэффициент усиления усилителя. Кроме того, в скважинном устройстве 8 обработки выборка цифрового сигнала производится при заданном усилении. Следовательно, если в этом случае пороговый уровень зафиксирован на постоянном уровне, отношение пика Е2 к амплитуде Ad каждого сигнала будет разным. При таких условиях для сохранения заданного отношения уровней порогов НТ и LT к пику Е2 для каждого сигнала вычисляют усиление обнаружения для каждого сигнала на основании амплитуды обнаруженного Е2. Затем на основании вычисленного таким образом усиления обнаружения устанавливают пороговые уровни НТ и LT для каждого сигнала.
Причина такого вычисления усиления обнаружения заключается в том, что при обработке цифрового сигнала время поступления и значение амплитуды пика Е2 определяют с использованием усиления обнаружения, которое было определено для предыдущего сигнала или которое было выбрано пользователем, если это самая первая обработка, и затем усиление обнаружения изменяют для текущего сигнала на основании этих значений. Текущий сигнал обрабатывают с использованием измененного усиления обнаружения, чтобы определить уточненные время поступления и значение амплитуды пика Е2. Повторив этот процесс дважды, можно определить время поступления и значение амплитуды пика Е2 на основании усиления обнаружения текущего сигнала. Как было описано выше, в данном варианте, поскольку пороги НТ и LT определяют при заданных отношениях к пику Е2 для каждого сигнала, необходимо определять усиление обнаружения для каждого сигнала, и с этой целью цифровой сигнал обрабатывают для определения его усиления обнаружения в программе автоматической регулировки усиления. В предпочтительном варианте осуществления в программе автоматической регулировки усиления максимальное и минимальное усиление обнаружения устанавливают в зависимости от условий и действительное усиление обнаружения определяют только в том случае, когда вычисленное усиление обнаружения попадает в интервал между ними.
На этапе 24, показанном на фиг.4, с помощью вычисленного таким образом усиления обнаружения рассчитывают разные пороговые уровни, включая высокий и низкий пороговые уровни НТ и LT. Например, в одном варианте вычисляют (1) желательую амплитуду (100%); (2) низкий порог (5%); (3) высокий порог (20%); (4) промежуточный порог шума (4%); и (5) высокий порог шума (40%).
Затем на этапе 25, представленном на фиг.4, задают интервал времени определения времени поступления Tt в цифровом сигнале. Интервал времени определения времени поступления служит для того, чтобы определить, какую часть цифрового сигнала следует использовать для определения времени поступления Tt. Такой интервал времени определения может быть установлен переменным или фиксированным для каждого сигнала. Для эффективного и быстрого выполнения операции определения времени поступления Tt желательно установить интервал времени определения там, где существует вероятность присутствия времени поступления Tt, т.е. так, чтобы интервал времени определения начинался в непосредственной близости к точке пересечения с порогом. Например, интервал времени определения для текущего и следующего цифрового сигнала устанавливают на основе результата обработки предыдущего цифрового сигнала, и поскольку время поступления текущего цифрового сигнала существенно не отличается от времени поступления предыдущего цифрового сигнала, целесообразно определить начало интервала времени определения, вернувшись к заданному периоду времени на основании времени поступления предыдущего цифрового сигнала. В частности, поскольку в скважине с необсаженным стволом принимают акустическую волну, которая проходит через подземную формацию, целесообразно устанавливать интервал времени определения переменным для каждого цифрового сигнала. Однако поскольку в скважине с обсаженным стволом время поступления остается неизменным для данного размера обсадной трубы, в ней можно использовать фиксированный интервал времени определения.
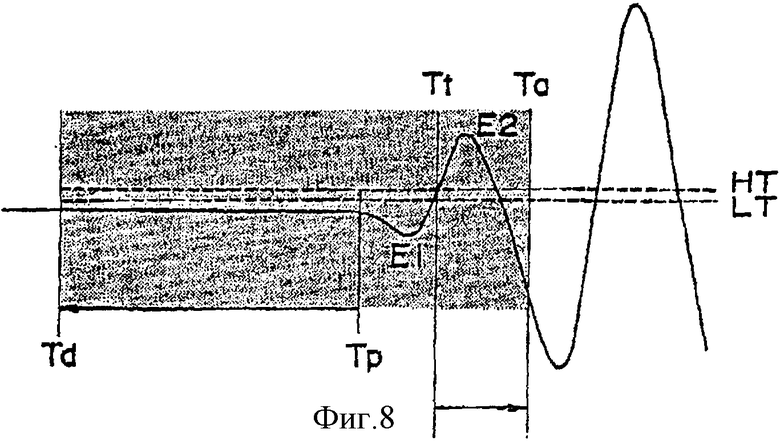
На фиг.8 Tt означает время начала интервала времени определения времени поступления, и его устанавливают посредством возврата к заданному интервалу времени, прошедшему от времени поступления Тр, которое было определено при предыдущей обработке, при этом видно, что время поступления Tt устанавливают на положительной точке первого пересечения цифрового сигнала с высоким порогом НТ, и здесь интервал времени определения заканчивается. После определения времени поступления Tt начинается интервал времени измерения амплитуды для пика Е2 на этапе 29 на фиг.4, который заканчивается в заранее определенное время Та. На фиг.9 показано, что цифровой сигнал сначала имеет нулевой уровень А0 на выходе из АЦП и изменяется до первого положительного пика Е2. Момент времени, когда цифровой сигнал впервые пересекает низкий порог LT, обозначен как ТLT, а момент времени, когда цифровой сигнал впервые пересекает высокий порог НТ, обозначен как ТHT. Время ТHT становится временем поступления Tt, определенным для этого сигнала. При этом значение амплитуды пика Е2 обозначено как Ad.
На этапах 26-28 на фиг.4 исполняют программу нахождения низкого и высокого порогов. Эту программу можно рассматривать как состоящую из двух стадий: (1) нахождение низкого и высокого порога с помощью данных выборочного сигнала и (2) нахождение окончательного высокого порога посредством интерполяции данных сигнала. На первой стадии, как показано на фиг.10(а), сканируют точки выборки цифрового сигнала, дискретизированного с интервалом 10 мкс в интервале времени обнаружения, установленного, как было описано выше, чтобы найти первые точки выборки, в которых произошли первые пересечения соответственно с низким и высоким порогами LT и НТ в положительном направлении. В данном случае это точка выборки ТLT, в которой произошло первое пересечение низкого порога LT в положительном направлении, и точка выборки ТHT, в которой произошло первое пересечение высокого порога НТ в положительном направлении. Следовательно, согласно обработке на первой стадии точку выборки ТHT предварительно принимают за время поступления Tt. Таким образом, в данном варианте время поступления определяют как момент времени, когда первая Р волна впервые пересекает высокий порог НТ в положительном направлении. Однако если время поступления определяют иначе, может быть применен другой способ его определения. При этом, хотя точка выборки ТHT предварительно принята за время поступления этого цифрового сигнала в результате первой стадии программы, может иметь место случай, когда точка выборки ТHT фактически находится далеко от высокого порога НТ. Это объясняется тем, что при сборе данных соответствующие точки выборки разнесены на интервал дискретизации в 10 мкс. Следовательно, если даже при достаточно малом или относительно большом интервале дискретизации в точке выборки ТHT, которая была определена на первой стадии, происходит пересечение с высоким порогом НТ с достаточной точностью, данная программа может быть закончена в конце первой стадии.
Эта программа позволяет с высокой точностью определить время поступления за счет точной оценки точки пересечения между цифровым сигналом и высоким порогом НТ с помощью интерполяции на второй стадии. Вторая стадия соответствует циклу, включающему в себя этап 28 на фиг.4. В данном варианте процесс интерполяции выполняют также в два этапа. Это значит, что сначала выполняют ограниченную по полосе интерполяцию, представленную на фиг.10 (b), а затем линейную интерполяцию, представленную на фиг.10(с). Как видно на фиг. 10 (с), ограниченную по полосе интерполяцию выполняют от точки выборки (в этом случае точки выборки ТLT), которая непосредственно предшествует точке выборки Tt, предварительно принятой за время поступления Tt, чтобы найти точки интерполяции с интервалом 2,5 мкс между точками выборки в цифровом сигнале в течение 10 мкс. Так как в этом примере интервал дискретизации цифрового сигнала равен 10 мкс, между двумя соседними точками выборки находятся три точки интерполяции за 10 мкс. После этого находят точку (точку выборки или точку интерполяции), в которой впервые происходит пересечение с высоким порогом НТ в положительном направлении как для точки выборки, так и для точки интерполяции. В этом примере находят точку интерполяции ТHT, которую предварительно принимают за уточненное время поступления Tt. Затем, как показано на фиг. 10 (с), находят две точки (в данном примере точку выборки ТLT и точку интерполяции ТHT'), ближайшие к пересечению с высоким порогом НТ, и выполняют линейную интерполяцию для этих двух точек, чтобы вычислить точку пересечения ТHT", с высоким порогом НТ', которую затем определяют как окончательное время поступления Tt. Как было описано выше, в данном варианте операцию интерполяции выполняют в два этапа, т.е. первого этапа с ограниченной по полосе интерполяцией и второго этапа с линейной интерполяцией, но можно создать систему, в которой происходит выполнение только одной интерполяции - ограниченной по полосе или линейной - в зависимости от условий применения.
Описанная выше ограниченная по полосе интерполяция хорошо известна как метод повторной выборки или определения точек интерполяции между точками выборки с большим разрешением, чем точки выборки, которые были впервые получены путем дискретизации. В этом отношении можно сослаться на работу А.В. Оппенгейма и Р.В. Шефера "Реконструкция ограниченного по полосе сигнала из его выборок" (Обработка дискретных временных сигналов, Инглвуд Клифф, Нью Джерси, США, Прентис Холл, 1989). При ограниченной по полосе интерполяции для реконструкции формы сигнала между точками выборки используют точки выборки самого сигнала. Это значит, что интерполированная амплитуда y(t) в заданной точке сигнала в момент времени t может быть вычислена с помощью следующего уравнения ограниченной по полосе интерполяции
где yi - амплитуда i-той выборки сигнала,
ti - время i-той выборки сигнала,
Т - интервал дискретизации,
n - количество выборок сигнала.
Однако в представленном выше уравнении для ограниченной полосы необходимо использовать все выборки сигнала и также применять фильтр такой же длины, что и сигнал. Чтобы избежать вычисления такого огромного объема данных, в предпочтительном варианте осуществления изобретения используют модифицированную ограниченную по полосе интерполяцию, в которой используют фильтр с меньшей длиной и можно использовать меньшее количество выборок сигнала вокруг подлежащей интерполяции точки. Это модифицированное уравнение для интерполяции в ограниченной полосе выглядит так: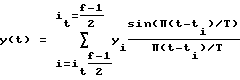
где it - индекс времени, ближайший к t,
f - длина фильтра в количестве выборок, нечетное число.
В предпочтительном варианте осуществления изобретения
используют это модифицированное уравнение ограниченной по полосе интерполяции, чтобы снизить требования к вычислениям и увеличить скорость обработки.
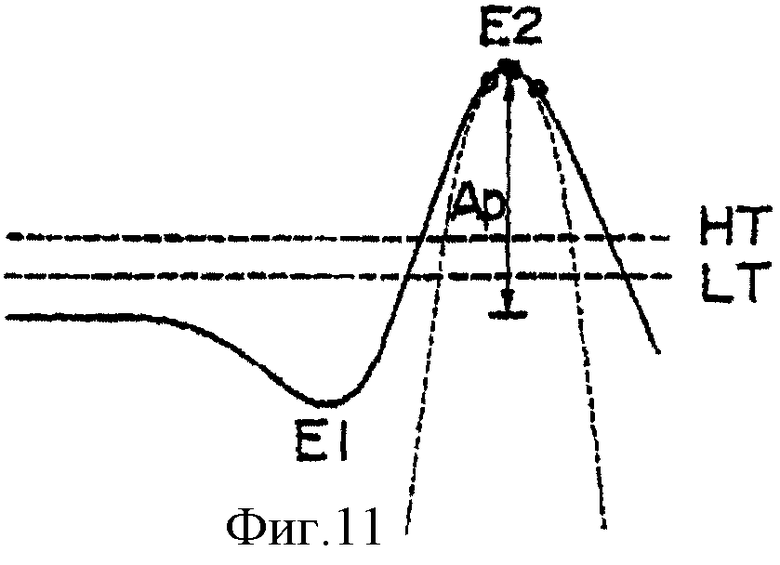
Затем на этапе 29 на фиг.4 измеряют амплитуду. В процессе измерения амплитуды измеряют амплитуду Ар первого поступившего пика. Это измерение амплитуды выполняют после нахождения высокого порога. Измеренную амплитуду используют в программе автоматической регулировки усиления, которая определяет высокий и низкий пороги НТ и LT, как было описано выше. В предпочтительном варианте осуществления изобретения эту пиковую амплитуду определяют из точек интерполяции сигнала, интерполированных в более узком интервале дискретизации, чем интервал дискретизации во время сбора данных. Кроме того, в скважине с обсаженным стволом при определении окончательной амплитуды используют уравнение квадратичной интерполяции, которое аппроксимируют параболической кривой.
Интервал времени измерения пиковой амплитуды устанавливают до определения времени поступления, когда устанавливают интервал времени определения времени поступления. Интервал времени измерения пиковой амплитуды составляет от Td до Та на фиг.8. Измерение пиковой амплитуды может быть выполнено независимо или одновременно с нахождением низкого и высокого порогов, т.е. даже если не определяют низкий и высокий пороги, можно определить пиковую амплитуду. Если высокий порог найден в момент Tt, время Та изменяют таким образом, что интервал времени измерения пиковой амплитуды заканчивается после заданного интервала времени после времени Tt. Выборки цифрового сигнала в интервале времени измерения амплитуды сканируют для нахождения максимального пика. Если амплитуды соседних точек выборки, т.е. предшествующей и последующей точки (правая и левая в проиллюстрированном примере), меньше, чем амплитуда текущей точки выборки, текущую точку выборки извлекают как пиковую и пик, имеющий максимальную амплитуду среди извлеченных таким образом пиков, становится пиковой амплитудой Ар. Измерение амплитуды корректируют с учетом смещения постоянного тока А0. Время окончания Та важно установить таким образом, чтобы в случае обнаружения пересечения с высоким порогом не обнаруживать любые Р волны, следующие за первой Р волной. Если обнаружено пересечение с высоким порогом, сканирование точек выборочных данных можно прекратить и начать сканирование точек интерполяции между точками выборочных данных.
Таким образом, согласно предпочтительному варианту осуществления изобретения для выполнения измерений амплитуды после нахождения точки интерполяции ТHT посредством определения высокого порога с использованием выборок цифрового сигнала, как показано на фиг.10(а), и определения высокого порога с использованием ограниченной по полосе интерполяции, как показано на фиг.10(b), момент времени через 25 мкс от этой точки интерполяции принимают за точку окончания Та интервала времени измерения пиковой амплитуды. Точку, имеющую максимальную амплитуду среди точек выборки и точек интерполяции в интервале 2,5 мкс интервала времени измерения пиковой амплитуды, принимают за пиковую амплитуду Ар. Если нахождение пиковой амплитуды должно производиться после определения высокого и низкого порогов, можно выполнить операцию нахождения пиковой амплитуды, используя данные фиг.10 (b). В частности, для скважины с обсаженным стволом, как показано на фиг.11, можно определить более точную окончательную пиковую амплитуду Ар путем выполнения квадратичной интерполяции с параболической аппроксимацией, используя три точки вблизи пика. Поскольку измерение амплитуды без квадратичной интерполяции обычно достаточно для программы автоматической регулировки усиления, определение пиковой амплитуды с использованием квадратичной интерполяции выполняют только для скважин с обсаженным стволом. Однако если программа автоматической регулировки усиления требует большей точности, можно определить пиковую амплитуду с использованием квадратичной интерполяции.
В дальнейшем будет описана программа проверки ошибок, названная логикой восстановления перескока цикла на этапе 30 на фиг.4. На этом этапе после определения времени поступления Tt с помощью процедуры нахождения высокого порога определяют, выдано ли оно как время поступления или нет. Программа проверки ошибок определяет, правильно получено время поступления в результате операции нахождения высокого порога или нет. Если определяют, что время поступления получено неправильно, то вновь выдают время поступления, которое было получено в предыдущей операции обнаружения. Кроме того, эта программа проверки ошибок определяет, требуется ли отменить программу автоматической регулировки усиления и программу управления интервалом времени обнаружения, если есть сомнение в правильности процесса обнаружения.
Согласно предпочтительному варианту осуществления изобретения, как было описано выше, если шум, обнаруженный во время обнаружения шума для базовой линии цифрового сигнала, классифицирован по трем видам: низкий, промежуточный и высокий уровень шума, и при этом отнесен к низкому шуму, и результат обнаружения по низкому и высокому порогам согласованный, тогда результат обнаружения данная программа проверки ошибок признает действительным. Если же результат обнаружения по нахождению низкого и высокого порога несогласован или шум классифицирован как промежуточный или высокий, тогда программа проверки ошибок признает этот результат обнаружения недействительным. В описанном выше варианте интерполяцию выполняют в случае нахождения высокого порога и не выполняют в случае нахождения низкого порога. Это объясняется тем, что разрешение 10 мкс обычно достаточно для нахождения низкого порога. Но если высокое разрешение требуется также и при нахождении низкого порога, можно выполнить аналогичную обработку с интерполяцией и в этом случае.
Как показано на фиг. 4, после завершения этапа проверки ошибок 30 всю последовательность обнаружения, представленную на фиг.4, выполняют многократно для того же цифрового сигнала и, как минимум, последовательность обнаружения повторяют дважды для одного и того же сигнала. Это объясняется тем, что если последовательность обнаружения, представленную на фиг.4, выполняют впервые для конкретного цифрового сигнала, ее выполняют с использованием значений, заданных пользователем, или значений, полученных в предыдущей последовательности обнаружения, а при выполнении последовательности обнаружения во второй раз может быть использован порог, установленный для пиковой амплитуды, которая была получена при первом выполнении последовательности обнаружения для данного цифрового сигнала. Таким образом, хотя двукратное выполнение всей последовательности для одного и того же цифрового сигнала позволяет существенно повысить точность полученного результата, трехкратное выполнение всей последовательности не обязательно является целесообразным, поскольку возрастает время вычислений, хотя при увеличении числа повторений возрастает надежность.
Несмотря на то, что выше были описаны конкретные варианты изобретения, оно не ограничено только этими вариантами, и разные модификации могут быть предложены без выхода за рамки объема изобретения.
Технический результат
Согласно изобретению цифровую обработку выполняют в скважине, и требуется передать только минимальный необходимый объем данных в наземное устройство обработки с помощью телеметрической связи, что сводит к минимуму вероятность возникновения ошибок. Кроме того, поскольку снижается нагрузка на ширину полосы частот телеметрической связи, улучшаются ее условия и повышается экономичность. Сокращение времени телеметрической связи позволяет повысить скорость акустического каротажа.




Использование: в технологии каротажа для измерения физических свойств подземных формаций. Сущность: способ включает предварительную обработку сигнала обнаружения в скважинном устройстве обработки для определения времени поступления акустической волны в его приемник и передачу на поверхность только времени поступления. Скважинный прибор для акустического каротажа (и система каротажа, в которой его используют) содержит управляющий блок для управления генерацией и приемом акустической волны, который содержит АЦП для преобразования сигнала обнаружения в цифровую форму с заданным интервалом дискретизации, первую память для сохранения полученного цифрового сигнала, вторую память для хранения программы обработки сохраненного цифрового сигнала и микропроцессор, выполненный с возможностью исполнения программы, хранящейся во второй памяти, чтобы при обработке цифрового сигнала, сохраненного в первой памяти, определить время поступления акустической волны, генерированной генератором и поступившей в приемник. 3 с. и 8 з.п. ф-лы, 11 ил.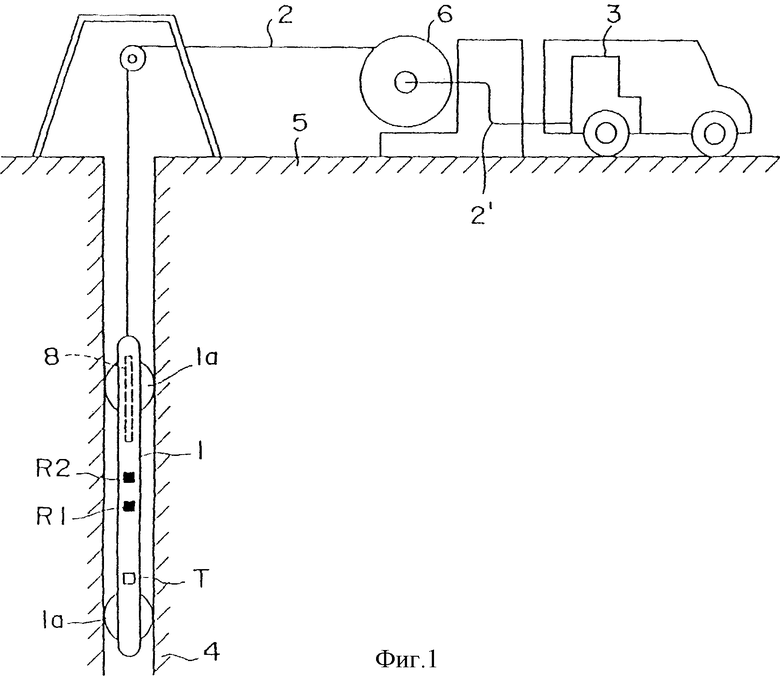
| СПОСОБ ЗАЩИТЫ АВТОНОМНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1971 |
|
SU424271A1 |
| Питатель для брусковых заготовок | 1973 |
|
SU457650A1 |
| Устройство для акустического каротажа скважин | 1982 |
|
SU1040447A1 |

