Область изобретения
Изобретение относится к системе каротажа, в частности к системе каротажа, позволяющей осуществлять эффективную перезапись программы обработки сигналов каротажа, хранящейся в каротажном зонде.
Описание предшествующего уровня техники
При проведении разведки подземных ресурсов, в частности нефти, необходимо определить характер подземных формаций, в которых предполагают наличие нефти. Для этого обычно бурят глубокую скважину в земле, размещают каротажный зонд (известный так же, как скважинный прибор) в соответствующем положении в скважине, чтобы обнаружить сигнал, который прошел через соответствующую подземную формацию, и анализируют обнаруженный таким образом сигнал для оценки подземной структуры. Такую технологию разведки обычно называют каротажем скважин, а используемая в ней система каротажа обычно содержит зонд (способный перемещаться вверх и вниз внутри скважины, в котором герметично заключены блок обнаружения и схема выборки данных), наземное устройство обработки (содержащее компьютер или аналогичное устройство на поверхности рядом со скважиной) и каротажный кабель для механической и электрической связи между зондом и наземным устройством обработки. Примерный вариант такой системы каротажа представлен на фиг.1.
Как представлено на фиг. 1, система каротажа 1 состоит из наземного устройства 2 обработки, расположенного на поверхности земли 5, зонда 3, способного перемещаться вверх и вниз внутри скважины 8, и каротажного кабеля 4 для механической и электрической связи между устройством 2 обработки и зондом 3. Наземное устройство 2 обработки содержит вращающийся барабан 6, к которому присоединен один конец каротажного кабеля 4. Когда барабан вращают по часовой стрелке или против часовой стрелки, каротажный кабель 4 разматывается или наматывается, в результате чего зонд 3, присоединенный к другому концу каротажного кабеля 4, перемещается вверх и вниз внутри скважины 8. Каротажный кабель 4 подсоединен (для передачи данных) к удлинителю 4' каротажного кабеля на поворотной оси барабана 6, а удлинитель 4' подсоединен к компьютеру 11.
В примере, представленном на фиг.1, в скважину 8 вставлена обсадная труба 9, чтобы предотвратить обрушение формации в скважину. Однако ствол скважины 8 может быть и необсаженным, т.е. не содержать обсадной трубы 9.
Зонд 3 в данном варианте снабжен электродом 12 обнаружения для выборки сигнала, который прошел через формацию. Электрод 12 обнаружения соединен через внутреннее межсоединение 14 с блоком 13 управления, который герметично заключен в зонд 3. Блок 13 управления осуществляет управление всеми операциями зонда, в частности управление выборкой, обработкой и передачей данных, а также диагностикой разных функций зонда под действием команд компьютера 11, находящегося на поверхности. Блок 13 управления содержит микропроцессор и ПЗУ, в котором хранится программа управления, позволяющие интерпретировать команды, переданные от компьютера 11 на поверхности, и функционировать в соответствии с этими командами.
Каждый раз, когда возникает необходимость изменить или усовершенствовать функции зонда 3, программа, хранящаяся в данный момент в ПЗУ в блоке 13 управления, больше не может быть использована и поэтому должна быть заменена. До настоящего времени для такого изменения функций требовалось поднять зонд из скважины на поверхность и частично разобрать его, чтобы извлечь старое ПЗУ и заменить его новым с новой программой. Для сохранения новой программы в новом ПЗУ требуется устройство для записи в ПЗУ, а старое ПЗУ при этом выбрасывают. Такое уничтожение старого ПЗУ неэкономично, а необходимость всегда извлекать зонд на поверхность для замены ПЗУ не снижает эффективность и работоспособность системы.
Сущность изобретения
Согласно изобретению предложена система каротажа скважин, содержащая устройство обработки, расположенное на поверхности земли, зонд, способный перемещаться вверх и вниз внутри скважины, и каротажный кабель, предназначенный для соединения устройства обработки с зондом и для подвешивания зонда в скважине, отличающаяся тем, что зонд содержит:
средство обработки сигналов для обработки дискретизованного сигнала обнаружения в соответствии с заданной программой обработки сигналов,
первое средство памяти для хранения этой программы обработки сигналов,
второе средство памяти для хранения программы записи, предназначенной для записи программы обработки сигналов в первое средство памяти в соответствии с командой наземного устройства обработки.
В предпочтительном варианте осуществления указанные два средства памяти являются энергонезависимыми, а в конкретном предпочтительном варианте осуществления первое средство памяти содержит, по меньшей мере частично, ЭСППЗУ. Второе средство памяти предпочтительно содержит другую часть того же ЭСППЗУ, но поскольку второе средство памяти предназначено для хранения программы для записи новой программы обработки сигналов и первое средство памяти, когда возникает необходимость обновить программу обработки сигналов, хранящуюся в первом средстве памяти, и поскольку программу программирования изменяют редко, второе средство памяти может быть не ЭСППЗУ, а ПЗУ (т.е. без возможности перезаписи).
Понятно, что благодаря обеспечиваемой изобретением возможности перезаписи программы обработки данных в зонде оператор системы каротажа, находящийся на поверхности, может относительно комфортно изменить программу обработки посредством наземного оборудования. Кроме того, большие удобства обеспечивают то, что программу можно хранить, например, на дискете или другом носителе информации, а затем инсталлировать на жесткий диск компьютера наземного устройства обработки. После этого по каротажному кабелю можно передать с компьютера в зонд команды для активизации программы записи внутри зонда, после чего можно передавать новую программу управления в зонд и сохранять ее в его памяти. Предпочтительно, чтобы каждый раз, когда передают данные команды, та же команда возвращалась обратно для подтверждения надежности первоначальной передачи данных.
Если в качестве памяти в зонде используют ЭСППЗУ, а также ввиду того, что зонд обычно подвержен воздействию суровых условий в скважине, таких, как высокое давление и температура, желательно записывать, какой раз производят перезапись программы, и заменять ЭСППЗУ на новое, когда это число превысит заданное значение, чтобы тем самым гарантировать надежность перепрограммирования ЭСППЗУ.
Краткое описание чертежей
В дальнейшем изобретение пояснено описанием конкретных вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - общий вид системы каротажа, в которой может быть реализовано изобретение,
фиг.2 - структурная схема, раскрывающая принцип изобретения,
фиг.3 - структурная схема блока управления зонда, реализующего программирование внутри зонда, выполненного в соответствии с одним вариантом осуществления изобретения,
фиг. 4 - алгоритм главной программы программирования внутри зонда, по одному варианту осуществления изобретения,
фиг. 5 - алгоритм подпрограммы записи программирования внутри зонда, вызываемой главной программой, представленной на фиг.4,
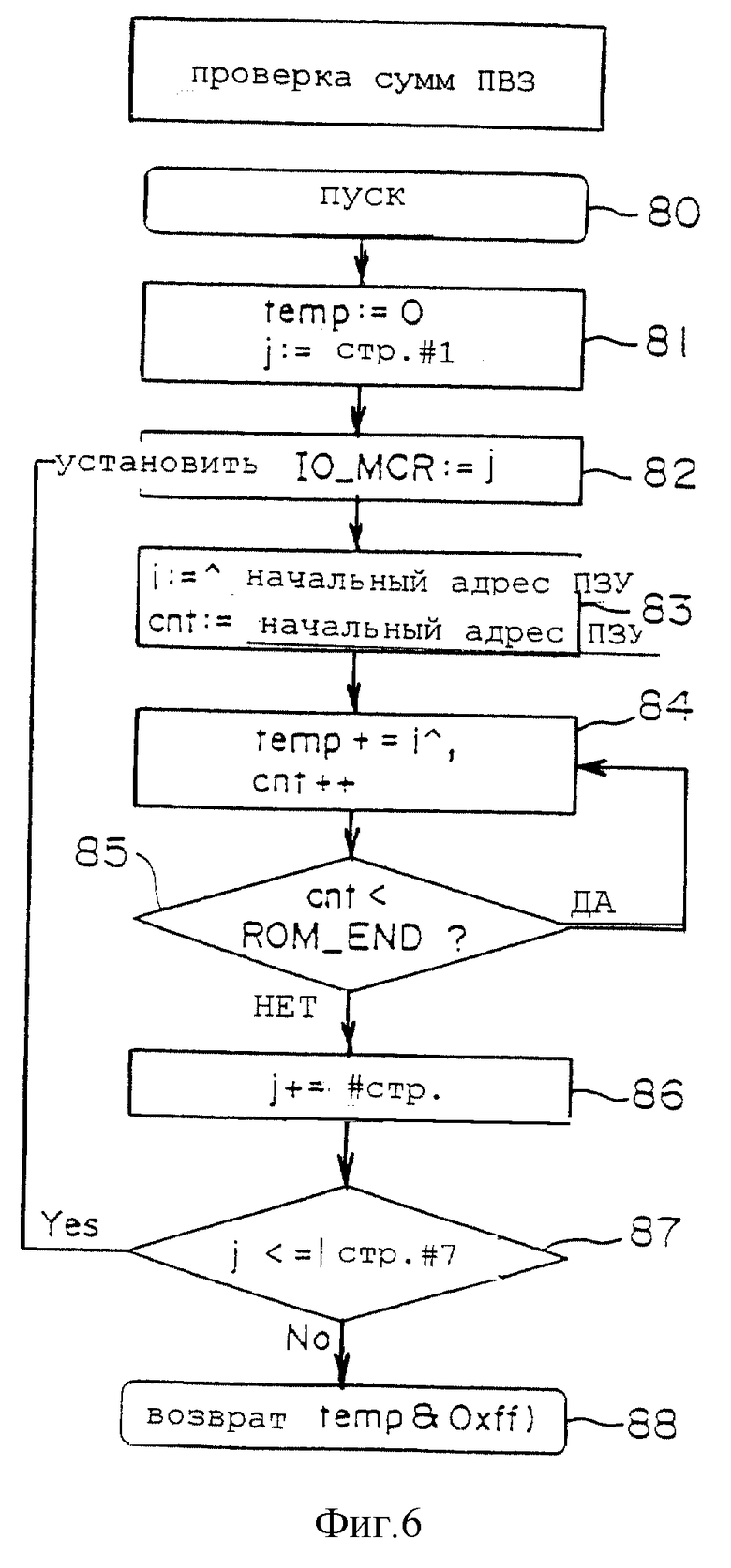
фиг. 6 - алгоритм подпрограммы для проверки результата записи программирования внутри зонда" вызываемой главной программой, представленной на фиг.4,
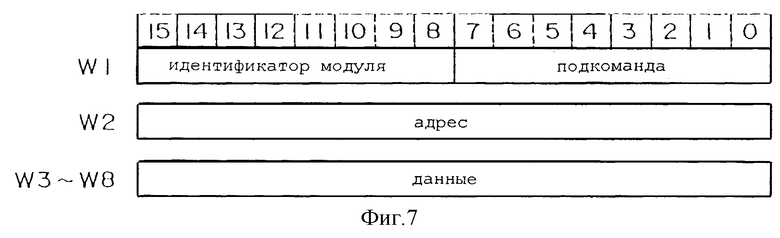
фиг. 7 - пример команды программирования внутри зонда, которую можно использовать в варианте программирования внутри зонда на фиг.3-6.
Условные обозначения
1 - система каротажа
2 - наземное устройство обработки
3 - зонд
4, 4' - каротажный кабель
8 - скважина
11 - компьютер
13 - блок управления
15, 16 - телеметрический интерфейс
20 - энергонезависимая программируемая память
28 а - телеметрический буфер
26 - процессор цифровых сигналов (ПЦС)
30 - память данных
30а - rbuf (буфер считывания)
30 - sendbuffer (буфер передачи)
31 - память РРП
Способы реализации изобретения
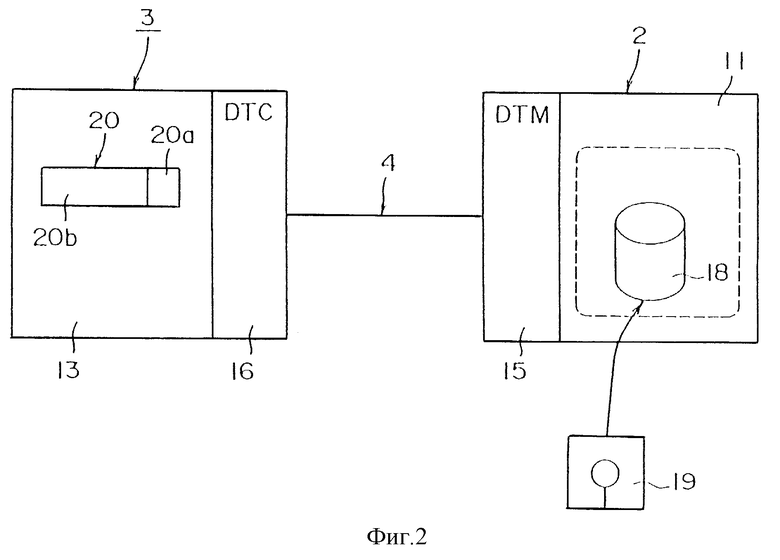
На фиг. 2 схематически представлена основная идея изобретения. Наземное устройство 2 (11) обработки, содержащее компьютер, посредством каротажного кабеля 4 механически и электрически связано с зондом 3, который может перемещаться вверх и вниз внутри скважины. Поскольку каротажный кабель 4 может перемещать зонд 3 вверх и вниз внутри скважины в подвешенном состоянии, он обеспечивает механическую связь между зондом 3 и наземным устройством 2 обработки. Кроме того, каротажный кабель 4 может передавать сигналы связи между блоком 13 управления для осуществления выборки данных и диагностики в зонде 3 и компьютером 11 наземного устройства 2 обработки и содержит предназначенные для этого линии передачи. В качестве линий передачи могут быть использованы металлические провода, а также оптические волокна. Поэтому в данном контексте понятие "каротажный кабель 4 для электрической связи между наземным устройством 2 обработки и зондом 3" охватывает также случай, когда каротажный зонд 4 содержит оптические волокна вместе или в дополнение к металлическим проводам для связи, в частности, случай, когда между наземным устройством 2 обработки и зондом 3 существует оптическая связь.
Каротажный кабель 4 функционально связан со стороны наземного устройства 2 обработки с компьютером 11 посредством телеметрического интерфейса компьютера (ТИК) 15, а со стороны зонда 3 с блоком управления внутри зонда 3 посредством телеметрического интерфейса зонда (ТИЗ) 16. Каротажный кабель 4 вместе с интерфейсами 15 и 16 на противоположных концах образует телеметрическую систему, которая позволяет осуществлять передачу данных между наземным устройством 2 обработки и зондом 3. Компьютер 11 наземного устройства 2 обработки может быть любым универсальным компьютером, например компьютером VAX. Компьютер 11 содержит жесткий диск18 с операционной системой OS, на нем же могут храниться разные управляющие программы для зонда 3, работающие на основе операционной системы OS. Дополнительно, операционная система OS может иметь расширенные функции, например функцию коммуникации, функцию управления памятью и т. п. , а не только функции простой операционной системы. Внутри блока управления 13 в зонде 3 имеется энергонезависимая программируемая память 20, которая может хранить программу для выполнения разных функций зонда 3. Хотя зонд 3 может иметь разные варианты в зависимости от разных целей, его основная функция - это обработка данных обнаружения сигнала, который прошел через формацию, обработка обнаруженного сигнала и передача обработанного сигнала в наземное устройство 2 обработки. Такая функция обработки данных часто подвергается модификации из-за обнаружения ошибок в программе или для повышения ее эффективности. Даже если программа была модифицирована таким образом, поскольку в предложенной каротажной системе память 20 для хранения программы обработки данных является энергонезависимой программируемой памятью, программа, хранящаяся на жестком диске 18 компьютера 11 в наземном устройстве обработки 2, может быть передана по каротажному кабелю 4 для записи в память 20.
Как было отмечено выше, память 20 является энергонезависимой и программируемой памятью. Предпочтительно использовать электрически стираемое программируемое постоянное запоминающее устройство ЭСППЗУ или любое другое запоминающее устройство. На схеме на фиг.2 память 20 разделена на первую область 20а памяти и вторую область 20b. В первой области 20а хранят программу записи для выполнения так называемого программирования внутри зонда (ПВЗ) для запоминания программы обработки данных, которая была принята после анализа команд от компьютера 11 в заданных адресах во второй области 20b данных, в том случае, когда новая разработанная программа обработки данных должна быть передана с компьютера 11, находящегося на поверхности земли, в зонд 3 для сохранения в нем. На фиг.2 показана схема, в которой программу для программирования внутри зонда и программу для обработки данных хранят в отдельных областях одной и той же памяти, однако программу для программирования внутри зонда не обязательно хранят в программируемой памяти. Это объясняется тем, что, поскольку программу для программирования внутри зонда модифицируют достаточно редко, поэтому ее можно хранить в памяти отдельно от той памяти, в которой хранится программа для обработки данных, и такая память может быть непрограммируемым ПЗУ. При таком варианте реализации, несмотря на невозможность модифицировать программу для программирования внутри зонда и на необходимость использования отдельного ПЗУ, так как программа для программирования внутри зонда хранится в памяти, отдельной от памяти для хранения программы для обработки данных, которую будут модифицировать более часто, существует преимущество, заключающееся в том, что обработка упрощается за счет записи программы для обработки данных в память 20.
В дальнейшем со ссылками на фиг.2 будет описан способ обновления программы для обработки данных внутри зонда 3. При этом предполагается, что программа для программирования внутри зонда уже сохранена в первой области 20а памяти 20 в зонде 3. Также предполагается, что, поскольку желательно добавить новую функцию в зонд 3, выполняющий каротаж и находящийся внутри скважины 8, была разработана обновленная версия, усовершенствующая программу для обработки данных, хранящуюся во второй области 20b памяти 20. Разработка такой новой программы обработки данных может быть произведена в любом месте по желанию разработчика, следовательно, в более комфортных окружающих условиях. Разработанную программу обработки данных затем запоминают на произвольном носителе информации, например на дискете 19, и доставляют к местоположению наземного устройства 2 обработки. Поскольку наземное устройство 2 обработки соединено с зондом 3 посредством каротажного кабеля 4, оно обычно расположено близко к устью скважины.
Затем оператор наземного устройства 2 обработки вставляет дискету 18 в компьютер 11 и запускает операционную систему OS для переноса обновленной программы обработки данных, записанной на дискете 19, на жесткий диск 18. После этого активизируют телеметрическую систему, и под действием команд с компьютера 11 программу обработки данных передают с жесткого диска 18 во вторую область 20b памяти 20 внутри зонда 3. В этом случае для обеспечения надежности передачи данных предпочтительно, чтобы каждый раз после интерпретации и обработки каждой команды компьютера 11 микропроцессором (не показан) в блоке 13 управления зонда 3, в результате чего данные были сохранены в заданных адресах во второй области 20b памяти, та же команда поступала обратно в компьютер 11, и если поступивший обратно сигнал идентичен исходной команде, передавалась следующая команда. В данном изобретении, как показано на фиг.1, такое программирование внутри зонда можно выполнять при опущенном в скважину 8 зонде 3, хотя согласно изобретению зонд 3 не обязательно должен находиться внутри скважины. Это значит, что, если даже зонд 3 находится на поверхности земли, пока он соединен с наземным устройством 2 обработки посредством каротажного кабеля 4, можно выполнять описанное выше программирование внутри зонда и даже в этом случае изобретение дает существенный эффект, так как ПЗУ не извлекают и нет необходимости выполнять трудоемкую операцию по замене памяти (включая частичную разборку зонда 3).
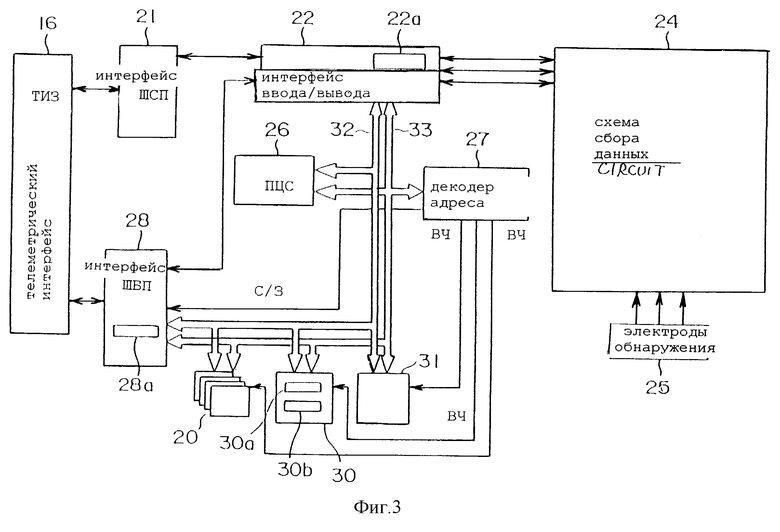
На фиг. 3 детально представлен вариант блока управления 13 зонда 3. ТИЗ 16 - это телеметрический интерфейс на стороне зонда 3, и, как показано на фиг. 1, он подсоединен к каротажному кабелю 4. Телеметрический интерфейс 16 соединен с двумя интерфейсами управления шинами, т.е. интерфейсом ШСП (шины скважинного прибора) 21 и интерфейсом ШБП (шины быстрой передачи) 28. Несмотря на то, что эти два интерфейса 21 и 28 шин по существу имеют идентичную конструкцию, интерфейс ШБП 28 имеет большую емкость и выполнен с возможностью высокоскоростной обработки. В интерфейсе ШБП 28 имеется телеметрический буфер 28а в качестве области временного хранения. Телеметрический буфер 28а может быть выполнен аппаратными средствами, например, как регистр, или за счет выделения частичной области памяти ЗУПВ или с использованием программных средств. Интерфейсы 21 и 28 шин подсоединены к интерфейсу 22 ввода/вывода данных, который имеет регистр IО_MCR 22а в качестве управляющего регистра. Управляющий регистр 22а используют для управления страницами загрузочной памяти 20 вместе с управлением включения доступа к записи и декодером адреса, как будет описано ниже.
Интерфейс 28 шины и интерфейс 22 ввода/вывода соединены посредством шины 32 данных и адресной шины 33, которые также подсоединены к процессору цифровых сигналов 26, загрузочной памяти 20, памяти 30 данных и памяти регистрации работы прибора (РРП) 1. Кроме того, адресная шина 33 также подсоединена к декодеру 27 адреса. Процессор 26 цифровых сигналов может быть стандартным процессором марки ADSP-2101, выпускаемым компанией Analog Devices Inc., США. Сигнал считывания/записи (С/3) подают в интерфейс 28 шины от адресного декодера 27, а сигнал включения чипа ВЧ подают в запоминающие устройства 20, 30 и 31 для проверки их рабочих условий.
Загрузочная память 20 в этом варианте представляет собой ЭСППЗУ, вся область памяти которого разделена на 8 страниц, т.е. страницы 0-7. Следует отметить, что только четыре из них показаны на фиг.3. В данном изобретении не является совершенно необходимым делить загрузочную память 20 на 8 страниц, и можно задать любое число страниц. В данном варианте программу для программирования внутри зонда хранят на странице 0, а любую другую программу каротажа, такую как программу обработки данных, хранят на страницах 1-7. Поскольку программа ПВЗ, хранящаяся на странице 0, является управляющей программой, предназначенной для управления сохранением программы каротажа на страницах 1-7, ее, в принципе, не предполагается изменять. Следовательно, когда требуется произвести программирование внутри зонда, необходимо предпринять предупредительные меры, чтобы не производить запись программы ПВЗ на странице 0. В модификации данного варианта программу ПВЗ, хранимую на странице 0, хранят в отдельном ПЗУ, подсоединенном к шине 32 данных и адресной шине 33, поскольку эту программу не предполагают изменять. В этом случае программу каротажа можно сохранять, начиная со страницы 0 загрузочной памяти 20, что облегчает управление записью программирования внутри зонда.
Память 30 данных можно выполнить, например, в виде ЗУПВ и использовать для временного хранения данных. В памяти 30 данных имеются буфер считывания (rbuf) 30а для считывания и временного хранения данных, переданных с компьютера 11, находящегося на поверхности земли, и буфер передачи (sendbuffer) 30b для передачи и временного хранения данных, подлежащих передаче в компьютер 11 на поверхности земли. Буферы 30а и 30b могут быть реализованы посредством выделения необходимых областей в ЗУПВ, составляющем память 30 данных.
Память РРП 31 - это память регистрации работы прибора (РРП), в которой регистрируют данные условий эксплуатации и рабочие данные, например рабочую температуру и время работы зонда 3. Память РРП 31 может быть выполнена в форме ЗУПВ, ЭСППЗУ или ЭППЗУ. В частности, в данном изобретении память РРП 31 имеет структуру для записи количества раз ПВЗ, произведенного в загрузочной памяти 20.
Процессор 26 цифровых сигналов обрабатывает команды, хранимые в памяти 30 данных, вместе с адресным декодером 27. При этом процессор 26 цифровых сигналов дает команду сохранить программу каротажа, переданную с компьютера на поверхности земли, на страницах 1-7 загрузочной памяти 20 в соответствии с программой ПВЗ, хранимой на странице 0 загрузочной памяти 20. В альтернативном варианте осуществления процессор 26 цифровых сигналов может быть заменен микропроцессором, микроконтроллером или подобным элементом.
Интерфейс 22 ввода/вывода данных соединен со схемой 24 выборки данных, которая в свою очередь подсоединена к электроду 25 обнаружения. Согласно изобретению, хотя схема 24 выборки данных и не является совершенно необходимой, так как в нормальные функции зонда 3 входит функция выборки данных для обнаружения сигнала, прошедшего через подземную формацию, электродом обнаружения 25, предусмотренным в зонде 3, и получения такого сигнала обнаружения как данных, схема 24 выборки данных должна представлять обычную функцию зонда 3. Такая функция выборки данных составляет часть программы каротажа, поэтому работой схемы 24 выборки данных управляют в соответствии с программой каротажа, хранимой на страницах 1-7 загрузочной памяти. После обновления программы каротажа для управления такой выборкой данных эту обновленную программу передают с компьютера 11, находящегося на поверхности земли, и запоминают на страницах 1-7 загрузочной памяти 20 в соответствии с программой ПВЗ, хранимой на странице 0 загрузочной памяти 20.
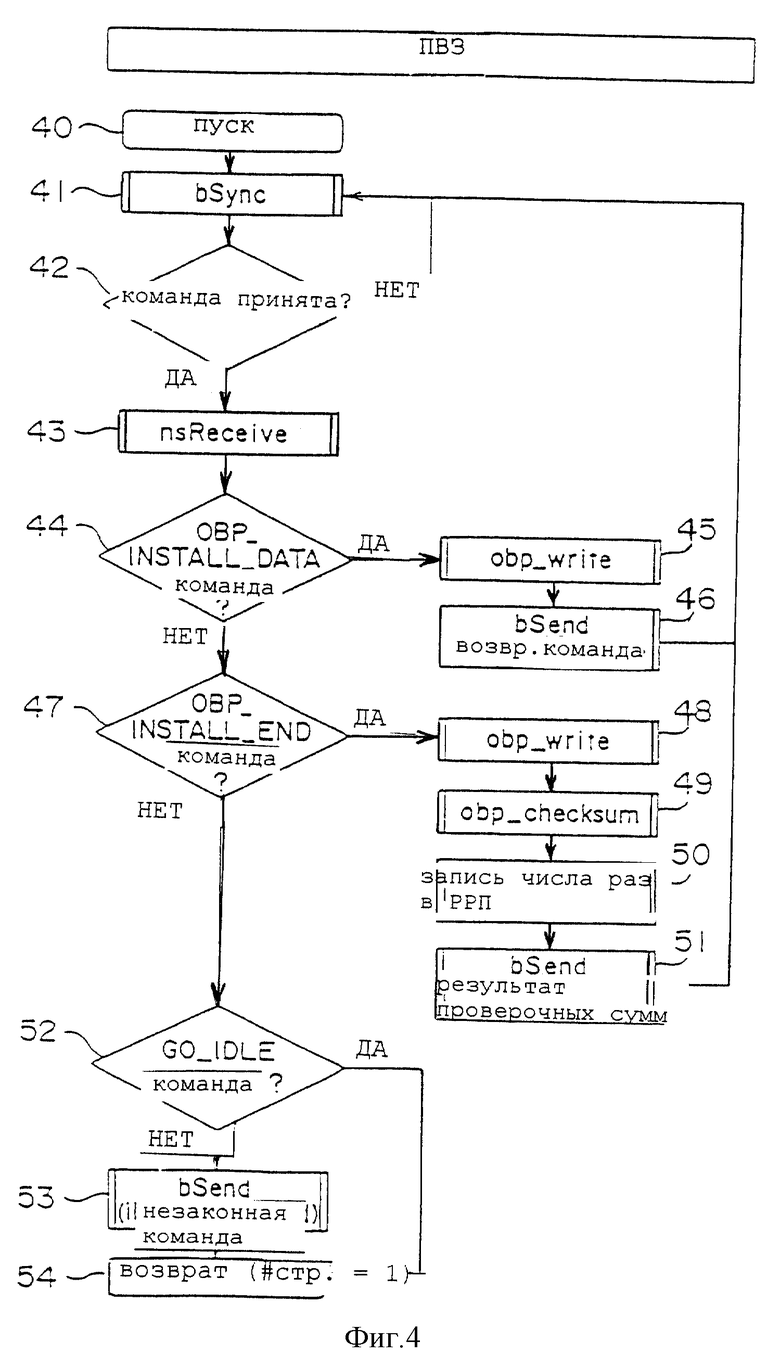
В дальнейшем, со ссылками на фиг.4, подробно раскрыта работа варианта программы ПВЗ, хранимой на странице 0 загрузочной памяти 20. В варианте, представленном на фиг.4, программа ПВЗ состоит из основной программы и пяти подпрограмм (т. е. bSync, nsReceive, obp_write, bSend и obp_checksum). На фиг.4 представлен алгоритм основной программы.
Обновленная программа каротажа была инсталлирована на компьютере 11 наземного устройства 2 обработки и подготовлена для передачи в зонд 3 по каротажному кабелю 3. Затем, как показано на фиг.4, после приема зондом 3 телеметрического синхросигнала, выданного телеметрическим интерфейсом 16 в заданный интервал времени, на этапе 40 начинается процесс выполнения. На этапе 41 вызывают подпрограмму синхронизации bSync, хранимую на странице 0 загрузочной памяти 20, для установления синхронности с телеметрической системой и осуществляют периодическую проверку в режиме опроса, чтобы определить, была ли принята команда в телеметрическом буфере 29а в интерфейсе 28 шины с компьютера 11. Если на этапе 42 определено, что команда от компьютера 11 присутствует в телеметрическом буфере 28а, на этапе 43 основная программа вызывает подпрограмму приема nsReceive, чтобы передать команду в телеметрическом буфере 28а в rbuf 30а в памяти 30 данных. Затем, на этапе 44, ПЦС 26 интерпретирует команду в rbuf 30а, чтобы определить, является ли она командой OBP_INSTALL_DATA для инсталляции данных обновленного программирования внутри зонда в загрузочной памяти 20.
Если результат определения на этапе 44 положительный, процесс переходит к этапу 45 и вызывают подпрограмму записи obp_write, которая составляет основную часть программы для программирования внутри зонда. В результате этой операции выполняют запись данных команды в загрузочную память 20 в соответствии с подпрограммой obp_ write, которая будет более подробно описана со ссылкой на фиг.5. После завершения записи команды на этапе 46 вызывают подпрограмму bSend, которая передает данные в компьютер 11, в результате чего та же команда, которая была обработана на этапе 45, возвращается в компьютер 11 по каротажному кабелю 4 в виде эхо-сигнала. В компьютере 11 возвращенную команду сравнивают с командой, которая была перед этим передана в зонд 3, и если в результате сравнения обнаружено, что они идентичны, это расценивают как подтверждение, что передача была успешной, если же в результате сравнения получено неравенство, компьютер 11 прерывает процесс.
Если компьютер 11 признал возвращенную команду нормальной, он передает следующую команду в зонд 3, и затем этапы 40-44 основной программы, представленной на фиг. 4, повторяют аналогичным образом только для этой команды. Если на этапе 47 определено, что команда является последней командой программирования ПВЗ, т.е. командой OBP_INSTALL_END, процесс переходит к этапу 48. На этапе 48 вновь вызывают подпрограмму obp_write для выполнения записи последней программы ПВЗ в загрузочную память 20. Затем, на этапе 49, вызывают подпрограмму obp_checksum, которая проверяет состояние записи программы ПВЗ, записанной в загрузочную память 20, для выявления ошибок в записанной программе ПВЗ. После этого процесс переходит к этапу 50, на котором в память РРП 31 записывают, сколько раз программа ПВЗ была записана в память 20. Необходимость этой операции основана на том, что, если загрузочная память является ЭСППЗУ, надежность записи уменьшается, когда количество раз записи превышает заранее установленное значение, и можно послать сигнал в компьютер 11 для выдачи предупреждения. Затем процесс переходит к этапу 51, на котором в компьютер 11 посылают обратный сигнал вместе с результатом проверки методом контрольных сумм.
Если на этапе 52 определено, что команда, посланная с компьютера 11, является командой GO_IDLE, что означает выход из режима программирования ПВЗ, режим ПВЗ прекращается и процесс переходит к этапу 54, на котором ПЦС 26 выполняет операцию перезагрузки, чтобы запустить программу каротажа, сохраненную на странице 1 и далее, в загрузочной памяти 20. В результате этого обновленная программа каротажа, сохраненная на стр. 1-7 загрузочной памяти 20, становится рабочей программой. Если ли же в результате определения на этапе 52 было установлено, что данная команда не является командой GO_IDLE, то, поскольку эту команду не ожидают в основной программе на фиг.4, на этапе 53 она возвращается обратно в компьютер 11 как запрещенная команда.
Далее, со ссылкой на фиг.5 будет подробно раскрыта работа подпрограммы записи obp-write программирования внутри зонда ПВЗ. Но прежде со ссылкой на фиг. 7 следует пояснить команду ПВЗ, используемую на фиг.4 и 5. Команда ПВЗ имеет кадр, содержащий 8 слов фиксированной длины, первые два из которых WI и W2 содержат заголовок, а остальные шесть слов W3-W8 содержат данные. На фиг.7 пунктирными линиями над первым словом W1 показаны положения бит в каждом слове с помощью номеров бит. В примере, представленном на фиг.7, верхние восемь бит слова W1 определяют область для хранения информации об идентификаторе модуля, т.е. в этом месте хранят информацию идентификатора зонда 3. Нижние восемь бит выделяют для подкоманд ПВЗ, и они указывают любые из этих разных команд в зависимости от назначения бит. Например, в случае битового назначения "0х86" в шестнадцатеричном числе эта команда может быть OBP_INSTALL_ DATA, а при битовом назначении "0х84" эта команда может быть OBP_INSTALL_ END. Кроме того, бит 0 слова W1 используют как флаг продолжения (Cf), следовательно, если этот бит установлен на "1", это означает, что данная команда является продолжением непосредственно предшествующей команды.
Второе слово W2 в команде содержит адресную информацию, относящуюся к положению для сохранения последующих данных, а в словах 3-8 (W3-W8) хранят данные, которые следует сохранить в загрузочной памяти 20, например обновленную программу каротажа в данном варианте. Следовательно, одна команда состоит из шести слов данных W3-W8. Поскольку каждое слово содержит два байта (1 байт = 8 битам), каждая команда состоит из 12 байт данных. В шестнадцатеричном представлении биты, которые должны быть назначены для каждого из слов W2-W8, находятся в диапазоне от "0х0" до "0хFFFF".
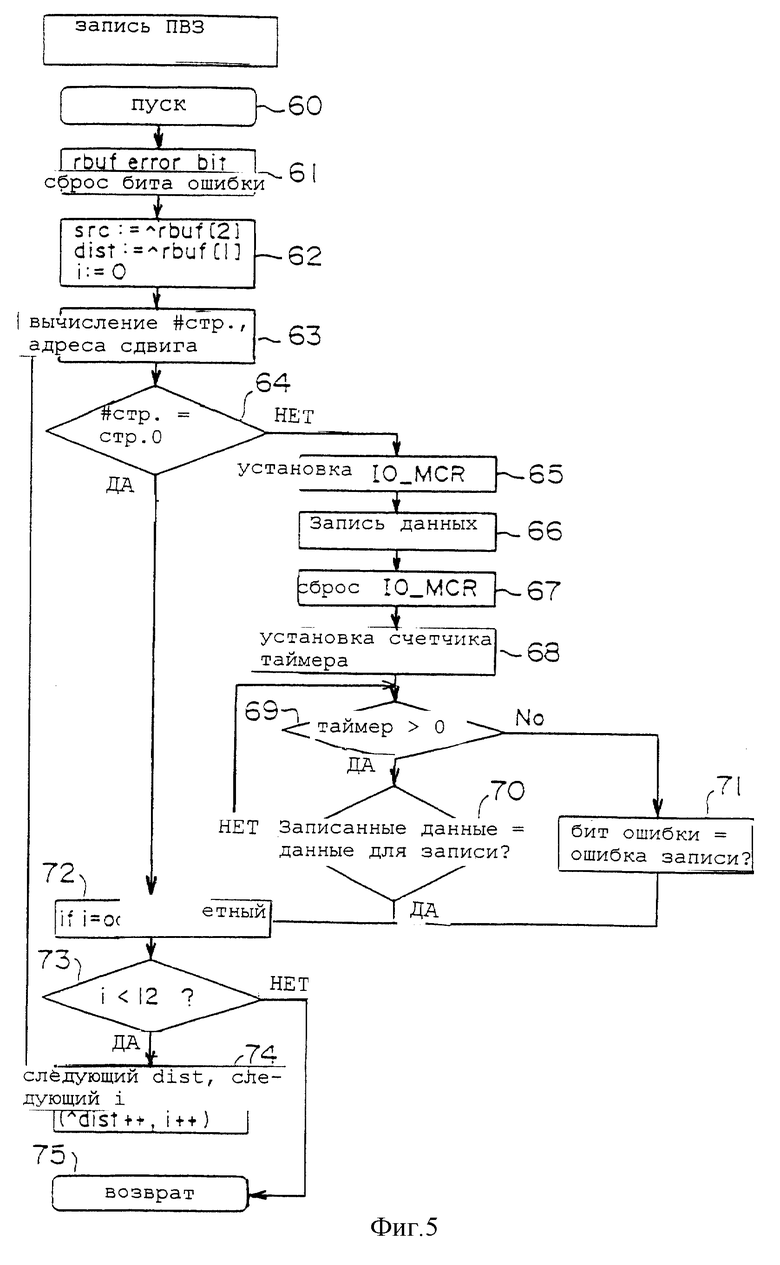
Если в главной программе, представленной на фиг.4, было определено, что программа ПВЗ должна быть записана в загрузочную память 20, на этапе 60 вызывают программу записи obp_ write, представленную на фиг.5. Затем, на этапах 61 и 62, производят инициализацию для подготовки к записи программы ПВЗ в загрузочную память 20. Это значит, что в первую очередь на этапе 61 сбрасывают ошибочные биты в буфере считывания rbuf 30а, а затем, на этапе 62, при установке в rbuf 30а адреса "src", который является источником подачи данных для записи, в загрузочной памяти 20 устанавливают адрес "dist", в который должны записывать данные, после чего счетчик устанавливают на 0.
Затем, на этапе 63, вычисляют соответствующий номер страницы загрузочной памяти 20 из адреса "dist" и адрес сдвига в соответствующей странице. Кроме того, из части данных команды в rbuf 30а извлекают один байт данных. На этапе 64 определяют, является ли вычисленный номер страницы номером "0", и если это так, процесс переходит к этапу 72, чтобы обойти последовательность записи ПВЗ. Это объясняется тем, что, поскольку программу ПВЗ, которая управляет программированием внутри зонда, хранят на странице 0 загрузочной памяти 20, переход к этапу 72 необходим, чтобы исключить затирание программы ПВЗ. Если же результат определения на этапе 64 показывает, что вычисленный номер страницы отличается от страницы 0, процесс переходит к этапу 65, на котором устанавливают регистр IO_MCR для установки режима включения записи, и один байт извлеченных данных записывают в загрузочную память 20 в соответствующий адрес. Затем, на этапе 67, производят сброс регистра IO_MCR для отмены режима включения записи. На этапе 68 устанавливают счетчик таймера, на этапе 69 определяют, прошел ли заданный интервал времени, и на этапе 70 определяют, идентичны ли данные, которые должны быть записаны в адрес, и данные, которые были записаны, т.е. правильно ли записаны данные.
Если результат определения на этапе 70 отрицательный, процесс возвращают к этапу 69, и, кроме того, если интервал времени таймера уже истек, процесс переходит к этапу 71. В этом случае, поскольку запись не была произведена правильно в установленный интервал времени, устанавливают бит ошибки. Если же результат определения на этапе 70 положительный, это означает, что запись была произведена правильно.
Таким образом, установка заданного интервала времени и определение, правильно ли была произведена запись в этот интервал времени таймера при выполнении записи в загрузочную память 20, имеет особый смысл, когда в качестве загрузочной памяти 20 используют ЭСППЗУ. Это объясняется тем, что при записи данных в ЭСППЗУ обычно требуется применять относительно высокое напряжение для записи в течение относительно длительного времени, и поэтому необходимо убедиться, правильно ли произведена запись. Кроме того, это связано не только с проблемой ЭСППЗУ, а также с тем, что изобретение позволяет производить программирование ПВЗ при положении зонда 3 как на поверхности, так и в глубине скважины 8. Внутреннее пространство скважины 8 обычно находится под действием суровых окружающих условий, в частности высокой температуры и высоких давлений, которые существенно отличаются от нормальных условий при записи в память, такую как ЭСППЗУ. Согласно изобретению, поскольку операции записи предполагается выполнять в условиях, отличающихся от нормальных условий при записи данных в память, такую как ЭСППЗУ, особенно важно обеспечить обратную связь для гарантии того, что запись произведена правильно.
Затем, на этапе 72, если значение счетчика "i" является нечетным числом, наращивают указатель источника "source", чтобы приготовиться к считыванию следующего слова данных, после чего процесс переходит к этапу 73. Если же значение счетчика "i" является четным числом, процесс переходит к этапу 73. Если значение счетчика "i" меньше 12, т.е. шести слов W3-W8 для всех данных одной команды, иными словами, если запись 12 байт данных не закончена, процесс переходит к этапу 74 наращивания адреса, назначения "dist" и счетчика "i", а затем возвращается к этапу 63, чтобы извлечь следующий байт из команды, хранящейся в rbuf 30а. После окончания записи всех двух байт данных команды, хранящейся в rbuf 30а, процесс переходит от этапа 73 к этапу 75, тем самым заканчивая процесс записи.
В дальнейшем со ссылкой на фиг.6 будет подробно описана подпрограмма obp_ checksum. После окончания записи последней команды ПВЗ на этапе 48 главной программы, представленной на фиг.4, как показано на этапе 80 на фиг. 6, вызывают подпрограмму obp_checksum для проверки наличия ошибок. На этапе 81 производят инициализацию и параметр "temp" для сохранения временной суммы (SUM) или результата сложения устанавливают на 0. Затем, на этапе 82, регистр IO_ MCR 22a, отвечающий за управление номером страницы, устанавливают на "j" и на этапе 83 указатель адреса "i" сначала устанавливают на начальный адрес ЭСППЗУ или загрузочной памяти 20. Кроме того, счетчик считывания "cnt" также исходно устанавливают на начальный адрес ЭСППЗУ. В блоке этапа 83 алгоритма программы обозначение "ПЗУ" использовано для удобства, но следует отметить, что оно фактически относится к ЭСППЗУ 20. Затем, на этапе 84, значение, указанное в указателе адреса "i", добавляют к параметру "temp", после чего наращивают значение счетчика "cnt". Этап 84 выполняют многократно до тех пор, пока не подойдут к концу данной страницы. После завершения страницы на этапе 85 процесс переходит к этапу 86 увеличения номера страницы "j", после чего возвращается к этапу 82 для повторения того же процесса еще раз. После окончания обработки всех страниц процесс с этапа 87 переходит к этапу 88, заканчивая процедуру проверочных сумм. Затем параметр "temp" и шестнадцатеричное число "0хFF" складывают для представления только нижних восьми разрядов "temp" как окончательного результата.
Технический результат
Как было отмечено выше, изобретение позволяет изменять программу каротажа внутри зонда с помощью телеметрической системы без необходимости разбирать и собирать зонд. Кроме того, поскольку программу каротажа хранят не в ПЗУ, а в программируемой энергонезависимой памяти, не приходится выбрасывать ПЗУ даже если модифицируют программу каротажа внутри зонда. Благодаря изобретению программу каротажа в зонде можно модифицировать независимо от того, находится зонд на поверхности или внутри скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АКУСТИЧЕСКОГО КАРОТАЖА | 1997 |
|
RU2181494C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА ВРЕМЕННОГО ИНТЕРВАЛА МЕЖДУ ПРИЧИНОЙ И СЛЕДСТВИЕМ | 2003 |
|
RU2354998C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ СКВАЖИННОЙ МЕЖПРИБОРНОЙ СВЯЗИ | 2004 |
|
RU2351957C2 |
| СКВАЖИННЫЕ СИСТЕМЫ ДАТЧИКОВ И СООТВЕТСТВУЮЩИЕ СПОСОБЫ | 2010 |
|
RU2524100C2 |
| ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ФЛЮИДА ПО ДАННЫМ АКУСТИЧЕСКОГО КАРОТАЖА | 2008 |
|
RU2477369C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СПЕКТРОСКОПИЧЕСКИХ ДАННЫХ В СКВАЖИНЕ | 2003 |
|
RU2503979C2 |
| АВТОНОМНЫЙ КОНТРОЛЬ ГЛУБИНЫ ДЛЯ СКВАЖИННОГО ОБОРУДОВАНИЯ | 2008 |
|
RU2461708C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПОЛУЧЕНИЯ ОПЕРЕЖАЮЩИХ ИЗМЕРЕНИЙ В ПРОЦЕССЕ ОПЕРАЦИИ БУРЕНИЯ | 2012 |
|
RU2576043C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ЗОНДА ДЛЯ ПРИБОРА НА ОСНОВЕ ИНДУКЦИИ ИЛИ РАСПРОСТРАНЕНИЯ С ПОПЕРЕЧНЫМИ ИЛИ ТРЕХОСНЫМИ МАССИВАМИ | 2004 |
|
RU2401442C2 |
| СКВАЖИННЫЙ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2009 |
|
RU2425213C1 |
Изобретение относится к геофизике. Сущность изобретения: система включает зонд, содержащий средство обработки сигналов для обработки выборочного сигнала обнаружения в соответствии с заданной программой обработки сигналов, первое средство памяти для хранения программы обработки сигналов и второе средство памяти для хранения программы записи программы обработки сигналов в первое средство памяти в соответствии с командой наземного устройства обработки. Технический результат: программу зонда можно обновлять с поверхности просто путем загрузки в него новой программы без необходимости поднятия зонда на поверхность. 7 з.п. ф-лы, 7 ил.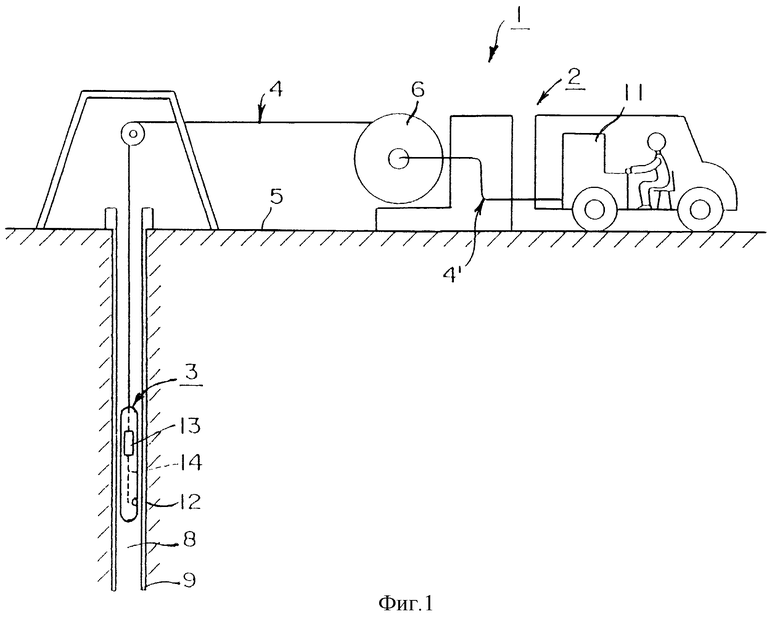
| Система акустического каротажа | 1981 |
|
SU1022098A1 |
| Аппаратура акустического каротажа | 1981 |
|
SU1004936A1 |
| СПОСОБ ЗАЩИТЫ АВТОНОМНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1971 |
|
SU424271A1 |
| Питатель для брусковых заготовок | 1973 |
|
SU457650A1 |

