Родственные заявки
По данной заявке испрашивается приоритет согласно предварительной заявке на патент США регистрационный № 60/528536, поданной 10 декабря 2003 г.
Область техники, к которой относится изобретение
В общем настоящее изобретение относится к способам и системам для исследования подземных пластов путем использования акустических или электромагнитных измерений, выполняемых в стволе скважины. Более конкретно, это изобретение относится к способам и системам для автоматического обнаружения вступлений компонент, представляющих интерес.
Уровень техники
Генерация и регистрация акустических волн в стволе скважины являются основой измерений, выполняемых при каротаже нефтяных скважин. Для выполнения акустических измерений в настоящее время имеются многочисленные скважинные устройства. Некоторые устройства включают в себя один источник акустических волн и два или более приемников, однако большая часть этих устройств в настоящее время включает в себя два или более акустических источников и много приемников, скомпонованных в группу. Хотя имеющиеся в настоящее время акустические устройства являются полезными при получении разнообразной информации, относящейся к окружающему пласту и скважинным параметрам, основное использование акустических скважинных измерений связано с получением оценок медленности пласта и обратной величины скорости волны при продольной волне и поперечной волне.
Медленность пласта при продольной волне обычно оценивают, используя времена пробега волны, регистрируемые в процессе обнаружения первого движения. В случае предполагаемого устройства с одним источником и двумя приемниками согласно предшествующему уровню техники медленность пласта оценивают путем вычитания времен вступления между двумя приемниками и деления на расстояние между двумя приемниками. Однако этой оценке присущи неточности, обусловленные наклоном устройства, расширениями ствола скважины, неблагоприятными граничными эффектами и т.д. Для снижения неточностей, вносимых такими эффектами окружающей среды, используют дополнительные акустические источники и приемники и более робастные способы, такие как анализ медленности и времени вступления когерентной акустической волны и обработка методом подобия, наряду с другими.
Обработка методом подобия может обеспечивать получение очень точных значений медленности для подземного пласта, но она является довольно дорогостоящей. Для обработки методом подобия обычно требуется регистрация «протяженных» форм волны (и связь вверх по стволу скважины, если обработка происходит на площадке скважины). Скорость каротажных работ часто замедляется на время, отводимое на сбор длинных сегментов форм волны и телеметрическую передачу всех данных с места в забое скважины в наземное оборудование.
Хотя обработка методом подобия обеспечивает получение надежных оценок медленности, для нее требуются значительные вычислительные ресурсы и регистрация протяженных форм волны. Однако многие разработчики скважин в основном заинтересованы в значениях медленности продольных волн. Поэтому записи всего лишь первого появления продольной волны может быть достаточно для очень быстрого получения медленности продольной волны. В таком случае сигналы первых вступлений могут быть использованы для формирования оценок медленности пласта. Однако современные способы обнаружения сигналов первых вступлений, представляющих интерес, не приводят к получению полезных результатов без контроля квалифицированным оператором и изменения множества параметров, когда каротажный зонд перемещается в стволе скважины. Необходимость изменения параметров обычно является результатом изменений в пласте. На высококвалифицированных операторов со специальными знаниями, необходимых для корректировки регистрируемых параметров каротажа и способов обработки, требуются очень большие затраты. Для многих областей применения каротажа будет полезным надежный, менее дорогостоящий способ каротажа, особенно способ каротажа, при котором уменьшается число параметров, которые необходимо корректировать во время каротажных работ, или исключаются такие параметры.
Настоящее изобретение направлено на устранение или по меньшей мере снижение последствий одной или нескольких проблем, изложенных выше.
Сущность изобретения
Настоящее изобретение удовлетворяет описанным выше потребностям, а также другим. В частности, настоящим изобретением предусмотрены способы и системы для выполнения измерений, относящихся к подземным пластам, и предпочтительно, к каротажу подземных пластов. Способы и системы обеспечивают получение робастных, надежных данных о первых вступлениях для компонентных сигналов, представляющих интерес, которые могут использоваться для оценивания медленности пласта, получения характеристик зон медленности пласта или служить входными величинами для другой обработки. Способами и системами можно автоматически согласованно обнаруживать данные о первых вступлениях на основании принятых сигналов без всякого взаимодействия с человеком и без задания или изменения каких-либо параметров даже в случае, если компонентный сигнал, представляющий интерес, является слабым по сравнению с шумом. Чтобы сформировать качественные данные о первых вступлениях, для предшествующих способов каротажа, особенно для способов, основанных на данных о первых вступлениях, требовался квалифицированный оператор для задания и изменения множества параметров.
В настоящем изобретении качественные данные о первых вступлениях формируются автоматически и не зависят от каких-либо исходных или изменяющихся параметров. Согласно некоторым аспектам в способах и системах выполняются измерения во множестве местоположений подземного пласта и автоматически обнаруживаются данные о первых вступлениях компонентного сигнала, представляющего интерес. Применяя принципы изобретения, согласованное обнаружение первых вступлений осуществляют без вмешательства человека во время каротажных работ даже по формам волны с низкими отношениями сигнала к шуму. Например, согласно настоящему изобретению первые вступления частей компонентных сигналов, представляющих интерес, из формы волны согласованно обнаруживаются, когда отношение сигнала к шуму для компонентного сигнала, представляющего интерес, в сопоставлении с шумовой частью формы волны составляет 10 дБ или ниже, 5 дБ или ниже или даже 3 дБ или ниже.
Согласно некоторым аспектам автоматическое обнаружение первых вступлений осуществляют путем приема форм волны, включающих в себя компонентный сигнал, представляющий интерес, формирования окна вокруг части формы волны, содержащей первое вступление компонентного сигнала, представляющего интерес, и нахождения точки вдоль формы волны и в пределах окна, при этом до и после точки имеются два различных компонентных сигнала. Точка, до и после которой имеются два различных компонентных сигнала, может быть определена путем использования статистического анализа формы волны. Два различных компонентных сигнала могут включать в себя шумовую часть и часть компонентного сигнала, представляющего интерес.
Согласно некоторым аспектам автоматическое обнаружение первых вступлений облегчается путем определения зоны, содержащей первое вступление компонентного сигнала, представляющего интерес, на основании только данных о форме волны. Это определение может включать в себя вычисление энергетического отношения для данных о формах волны и умножение энергетического отношения на функцию демпфирования для уменьшения или исключения влияния сильных поздних вступлений.
Согласно принципам изобретения результаты данных о первых вступлениях могут быть сделаны более надежными путем исключения выпадающих значений первых вступлений до представления конечных данных о первых вступлениях. Согласно некоторым аспектам изобретения Z-оценку вычисляют после обнаружения всех первых появлений в массиве форм волны, а выпадающие значения данных о первых вступлениях исключают путем сравнения Z-оценки с порогом, и при этом исключают каждое обнаруженное первое вступление в случае, если Z-оценка выше порога или равна ему. Однако по меньшей мере один раз, до исключения далеко расположенного вступления, может быть промежуточный этап повторного обнаружения каждого первого вступления в случае, если Z-оценка выше порога или равна ему. Тем не менее после предварительно определенного числа повторных обнаружений, которых может быть немного, например нулевое количество, одно или два, первые вступления в случае, если Z-оценка выше порога, отбрасывают. Кроме того, при любых повторных обнаружениях вместо использования для окна формы волны только принятых данных о формах волны на основании частоты сигналов вступления может быть вычислено новое окно, содержащее, как ожидается, сигналы первых вступлений.
Согласно некоторым аспектам в данных о первых вступлениях подавляют выбросы. Подавление выбросов может включать в себя вычисление Z-оценки для первых вступлений, обнаруженных посредством приемника на нескольких глубинах, сравнение Z-оценки с порогом, исключение первых вступлений в случае, если Z-оценка равна порогу или выше, чем порог, и осуществление интерполяции между первыми вступлениями в случае, если Z-оценки ниже порога.
Согласно другому аспекту изобретения предусмотрен способ каротажа, заключающийся в том, что генерируют акустические волны посредством источника, принимают формы колебаний акустической волны посредством множества приемников, автоматически вычисляют окна для одной из форм колебаний акустической волны, содержащей первое появление компонентного сигнала, представляющего интерес, и автоматически обнаруживают в пределах окна местоположение первого появления компонентного сигнала, представляющего интерес. Автоматическое вычисление окна может включать в себя образование функции локализации на основании принятых форм колебаний акустической волны. Согласно некоторым вариантам осуществления функция локализации является энергетическим отношением для формы колебаний акустической волны, умноженной на член демпфирования для подавления поздних вступлений.
Согласно еще одному аспекту изобретения предусмотрен способ каротажа, заключающийся в том, что генерируют акустические волны, принимают формы колебаний акустической волны, автоматически обнаруживают местоположения первого движения компонентного сигнала, представляющего интерес, для каждой из форм колебаний акустической волны и автоматически контролируют качество местоположений первых движений. Автоматическое контролирование качества может включать в себя вычисление Z-оценки после обнаружения всех первых появлений в массиве форм волны, сравнение Z-оценки с порогом, повторное обнаружение каждого обнаруженного местоположения первого движения в случае, если Z-оценка выше порога или равна ему, при этом повторное обнаружение включает в себя формирование нового окна ожидаемых сигналов первых движений на основании частоты принятых акустических сигналов, а не на основании данных о местоположениях первых движений, повторное обнаружение первого движения, сравнение каждого повторно обнаруженного местоположения первого движения с порогом и исключение каждого повторно обнаруженного местоположения первого движения в случае, если Z-оценка выше порога или равна ему.
Согласно еще одному аспекту изобретения предусмотрены способы и системы для нахождения первых вступлений в формах волны. Способами и системами можно автоматически определять окно, содержащее первое вступление вокруг части формы волны, в соответствии с первым алгоритмом путем использования самой формы волны в качестве входной величины. Затем способами и системами изобретения можно автоматически обнаружить первое вступление в пределах окна в соответствии со вторым алгоритмом. Для демпфирования высокоэнергетических поздних вступлений первый алгоритм может включать в себя произведение энергетического отношения формы волны и функции регуляризации. Во втором алгоритме может использоваться статистический анализ обрабатываемого методом окна интервала формы волны для нахождения точки, до и после которой содержатся два различных сигнала.
Еще один аспект изобретения может включать в себя способы и системы каротажа посредством каротажного зонда, включающие в себя генерацию акустических волн, прием форм колебаний акустической волны, автоматическое обнаружение первых появлений компонентного сигнала, представляющего интерес, даже в случае, когда отношение сигнала к шуму компонентного сигнала, представляющего интерес, в сопоставлении с шумом составляет 10 дБ или ниже, и получение оценки медленности на основании времен пробега первых появлений и расстояний между приемниками каротажного зонда. Способы и системы для каротажа могут включать в себя получение характеристик медленности для зон пласта на основании оценки медленности и обработку методом подобия форм колебаний акустической волны с учетом характеристик медленности зон. Согласно некоторым аспектам выполняют распределение медленности в одну из пяти общих категорий медленности.
Согласно еще одному аспекту изобретения предусмотрены способы и системы для получения характеристик медленности при каротажных работах с обработкой методом подобия, включающие в себя автоматическое обнаружение данных о первых вступлениях компонентного сигнала, представляющего интерес, без вмешательства во время каротажных работ, при этом формы волны, на основании которых автоматически обнаруживаются данные о первых вступлениях, содержат сигнал, представляющий интерес, с отношением сигнала к шуму компонентного сигнала, представляющего интерес, в сопоставлении с шумом, составляющем 10 дБ или ниже.
Согласно еще одному аспекту изобретения предусмотрена каротажная система, содержащая акустический зонд, имеющий источник и множество приемников, установленных на нем, компьютер в связи с акустическим зондом и набор инструкций, исполняемых компьютером, который при реализации автоматически согласованно обнаруживает первые вступления компонентного сигнала, представляющего интерес, по формам колебаний акустической волны, имеющим отношение сигнала к шуму 10 дБ или ниже. Набор инструкций может содержать инструкции для вычисления окна функции локализации вокруг части формы акустических колебаний волны, принятой приемниками, на основании данных, содержащихся в форме колебаний акустической волны, при этом окно содержит местоположение первого вступления компонентного сигнала, представляющего интерес, и для определения путем использования статистического анализа местоположения первого вступления компонентного сигнала, представляющего интерес, в пределах окна, в точке в пределах окна, при этом до и после точки имеются два различных компонентных сигнала.
Согласно еще одному аспекту предусмотрена система, содержащая измерительную систему, предпочтительно каротажный зонд, способную согласованно обнаруживать по результатам измерений первое движение компонентного сигнала, представляющего интерес, имеющего шумовую часть и часть компонентного сигнала, представляющего интерес, при этом часть компонентного сигнала, представляющего интерес, является относительно слабой по сравнению с шумовой частью. Например, посредством каротажного устройства можно согласованно обнаруживать первое движение по результатам измерений, имеющим отношение сигнала к шуму для компонентного сигнала, представляющего интерес, в сопоставлении с шумом 10 дБ или ниже, 5 дБ или ниже или даже 3 дБ или ниже.
Дополнительные преимущества и новые признаки изобретения будут изложены в описании, которое приведено ниже, или могут быть выявлены специалистами в данной области техники при изучении этих материалов или практическом использовании изобретения. Преимущества изобретения могут быть получены с помощью средств, перечисленных в прилагаемой формуле изобретения.
Краткое описание чертежей
Сопровождающими чертежами иллюстрируются предпочтительные варианты осуществления настоящего изобретения, и они являются частью описания. Совместно с нижеследующим описанием чертежами демонстрируются и поясняются принципы настоящего изобретения.
На чертежах:
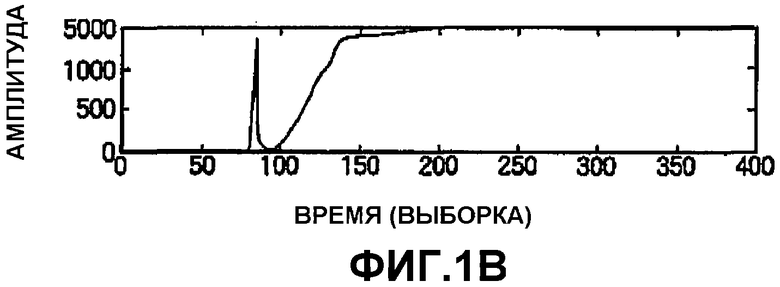
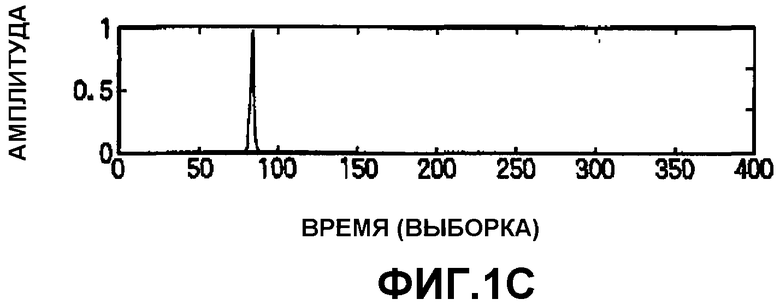
фиг.1А-1С - вид формы волны и для сравнения результаты обнаружения вступлений путем вычислений стандартного энергетического отношения и функции локализации согласно настоящему изобретению; фиг.1А - вид формы волны, фиг.1В - иллюстрация применения стандартного энергетического отношения к форме волны из фиг.1С - иллюстрация применения функции локализации согласно настоящему изобретению к форме волны из фиг.1А;
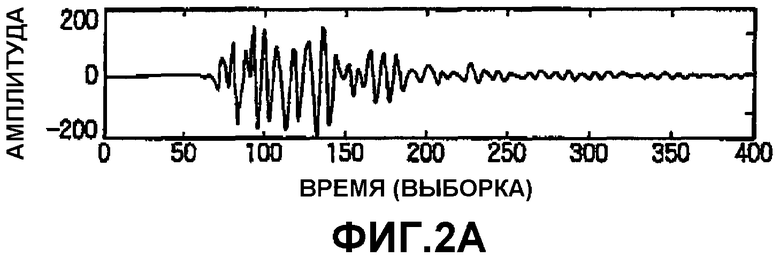
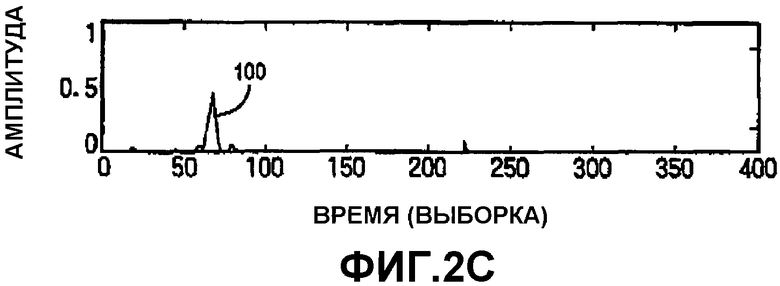
фиг.2А-2С - вид формы волны с поздним вступлением и для сравнения результаты обнаружения вступлений путем вычислений стандартного энергетического отношения и функции локализации согласно настоящему изобретению;
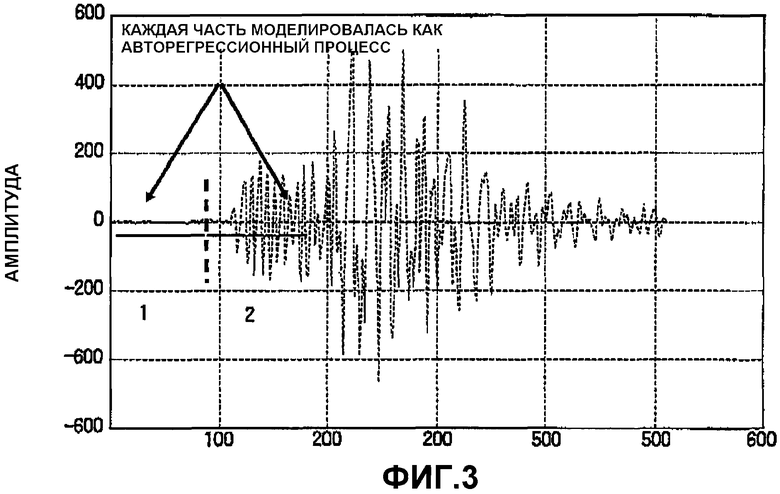
фиг.3 - иллюстрация применения принципа обнаружения первого появления с учетом авторегрессионной модели согласно одному варианту осуществления настоящего изобретения;
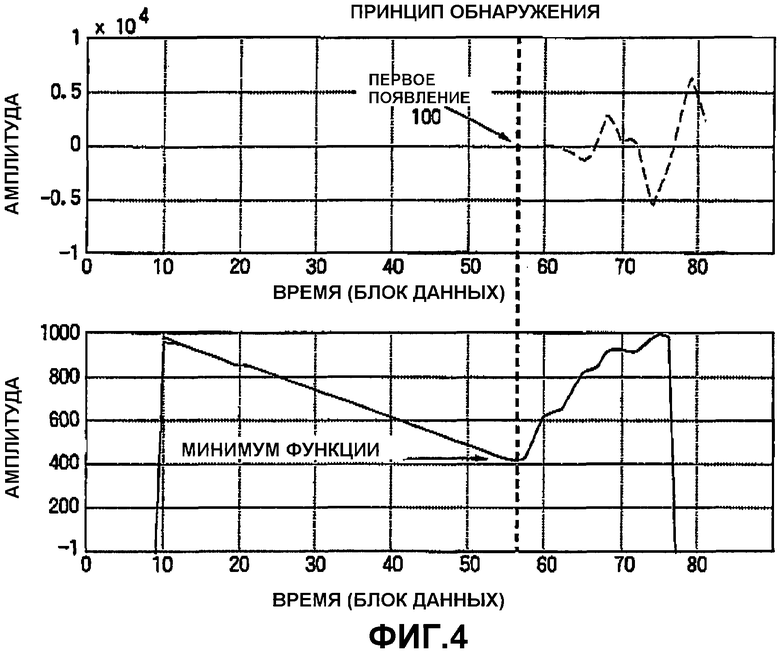
фиг.4 - иллюстрация обнаружения первого появления в форме волны путем вычисления минимума статистической функции согласно одному варианту осуществления настоящего изобретения;
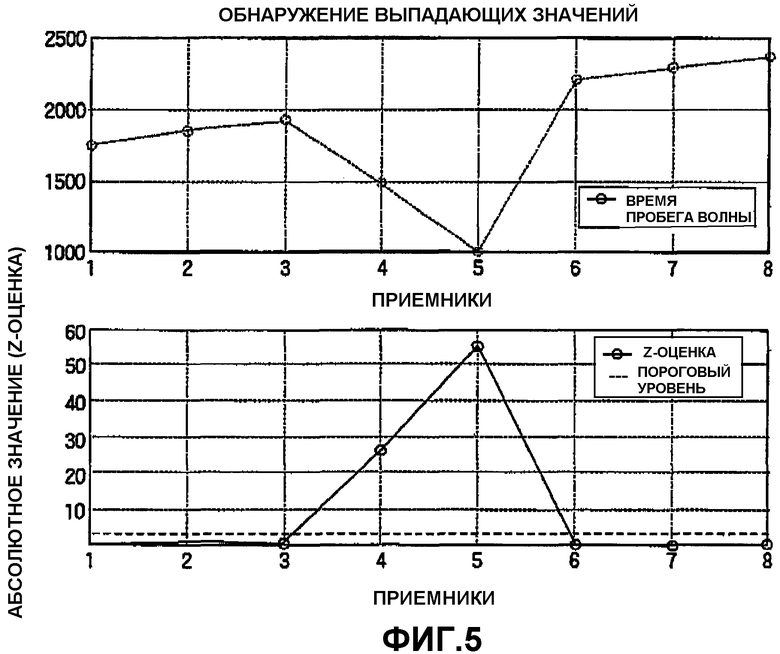
фиг.5 - иллюстрация обнаружения выпадающих значений в наборе данных времен первых вступлений согласно одному варианту осуществления настоящего изобретения;
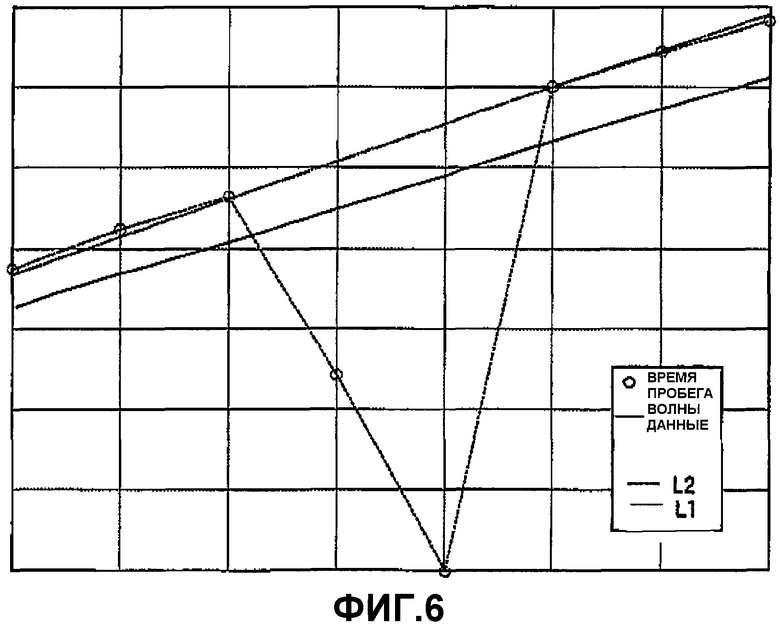
фиг.6 - диаграмма оценок медленности, иллюстрирующая подбор L1 на основании данных о первых вступлениях, согласно одному варианту осуществления настоящего изобретения;
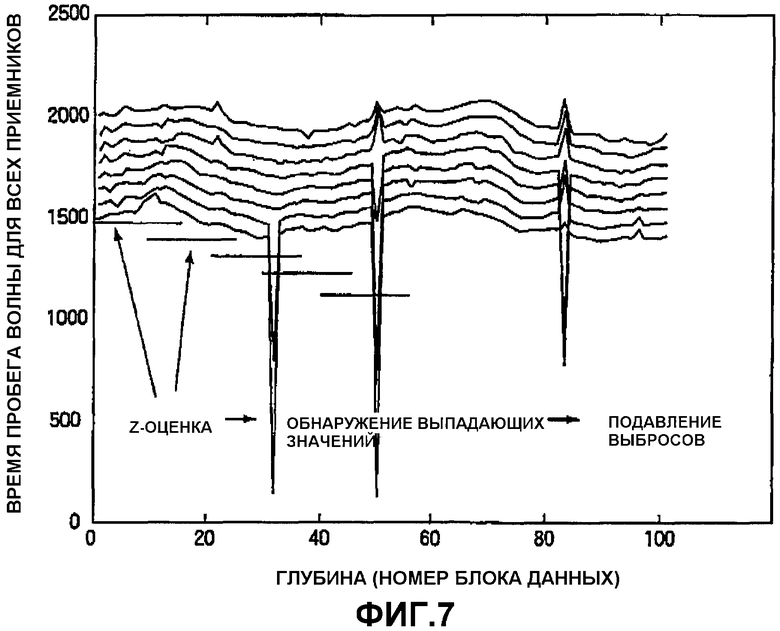
фиг.7 - иллюстрация способа удаления выбросов в глубинной области согласно одному варианту осуществления настоящего изобретения;
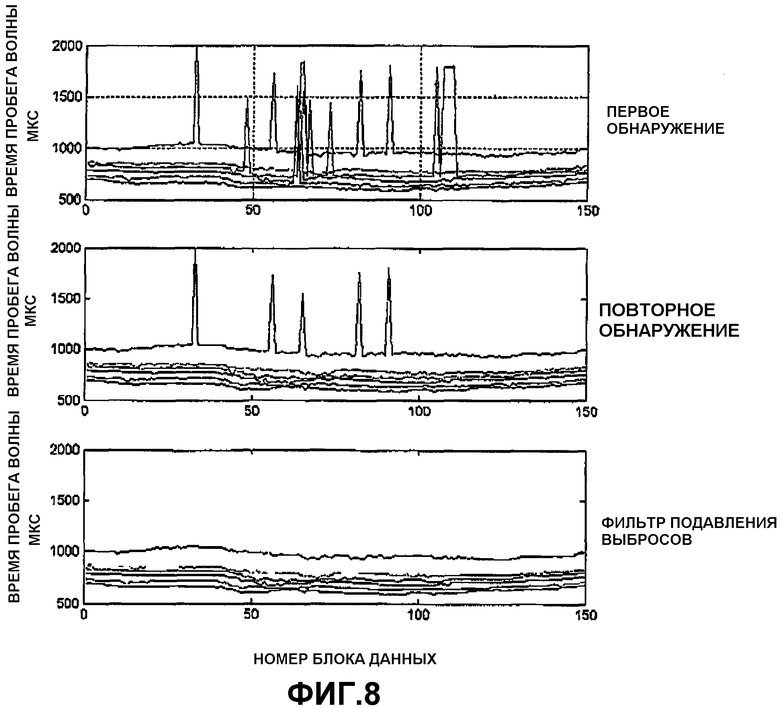
фиг.8 - иллюстрация этапа повторного обнаружения в способе удаления выбросов, показанном на фиг.7, согласно одному варианту осуществления настоящего изобретения;
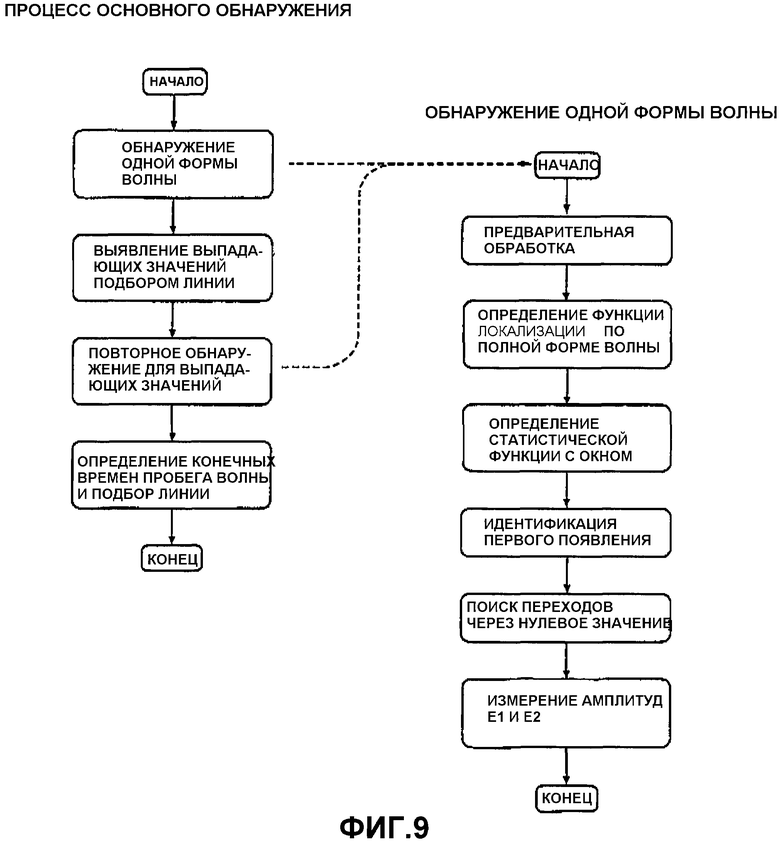
фиг.9 - блок-схема последовательности операций, иллюстрирующая этапы получения качественных данных о первых вступлениях согласно одному варианту осуществления настоящего изобретения;
фиг.10 - иллюстрация обнаружения и коррекции за выпадающие значения данных о первых вступлениях согласно одному варианту осуществления настоящего изобретения;
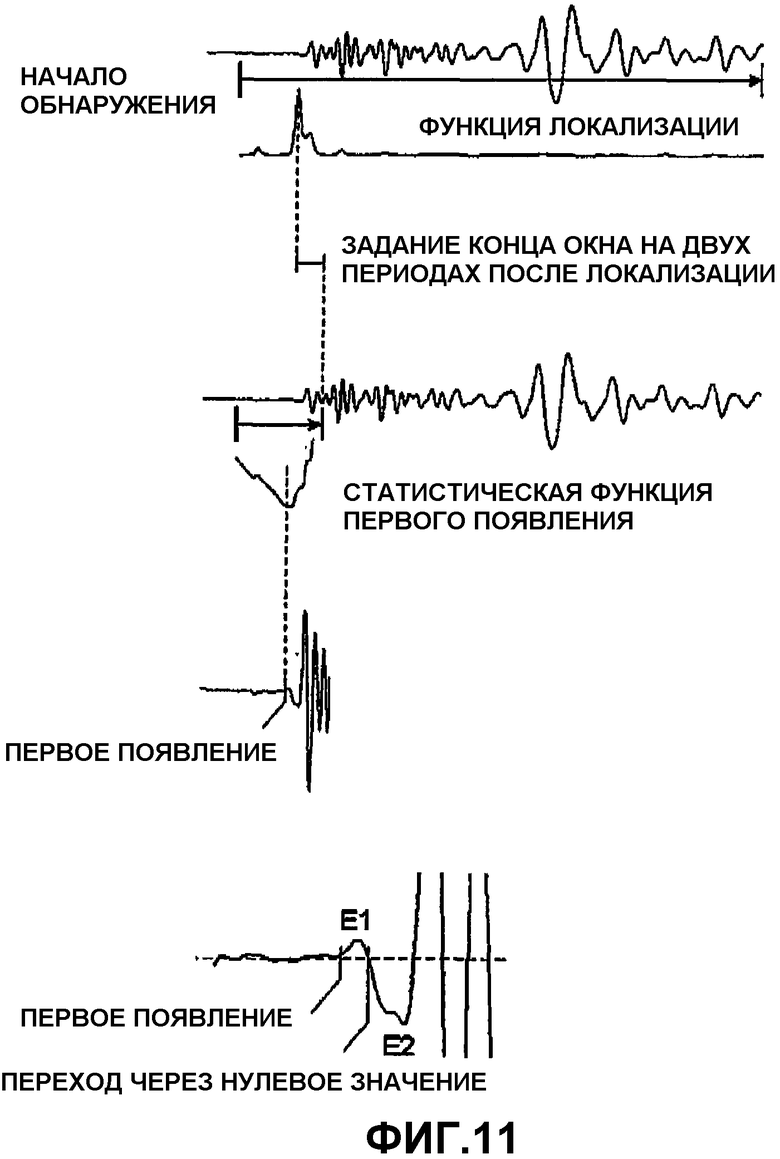
фиг.11 - иллюстрация локализации статистической функции для зоны поиска с целью нахождения точного или почти точного местоположения первого появления согласно одному варианту осуществления настоящего изобретения;
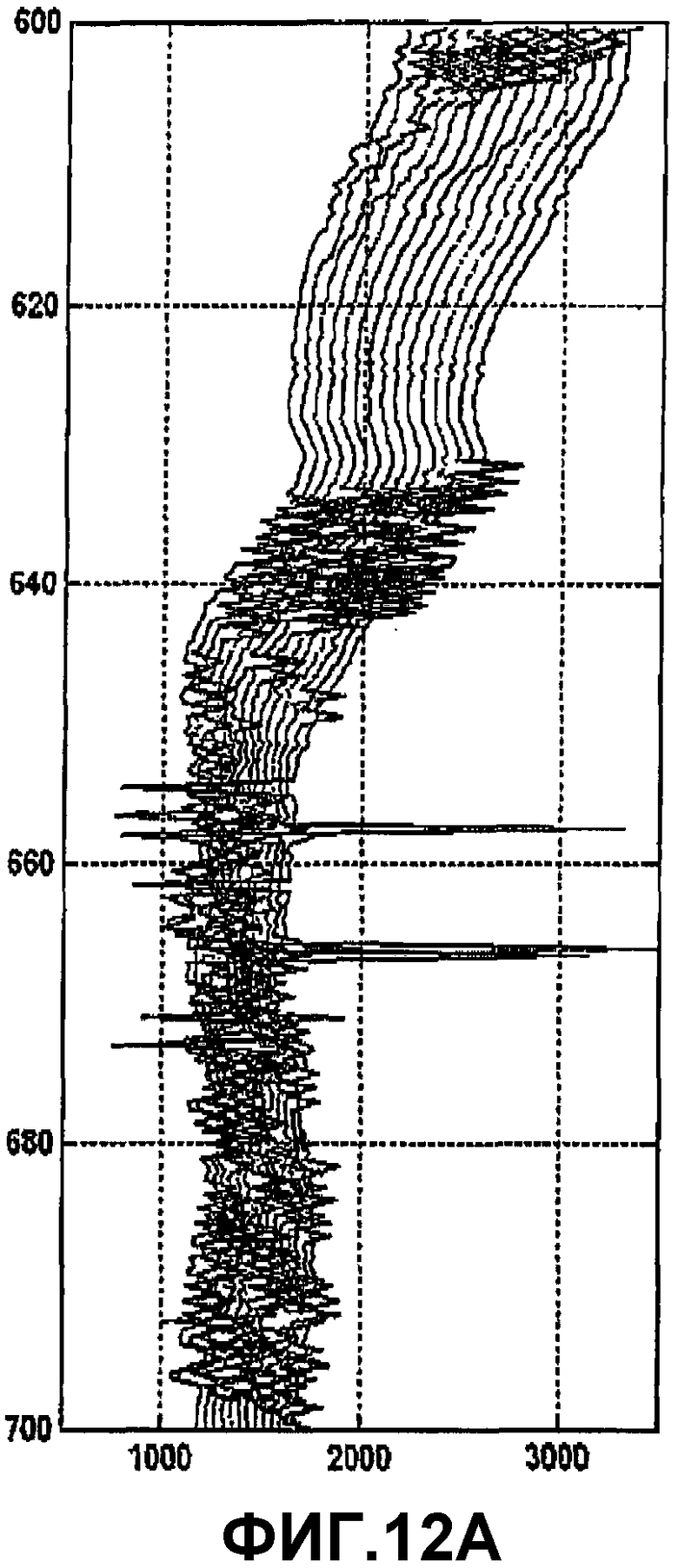
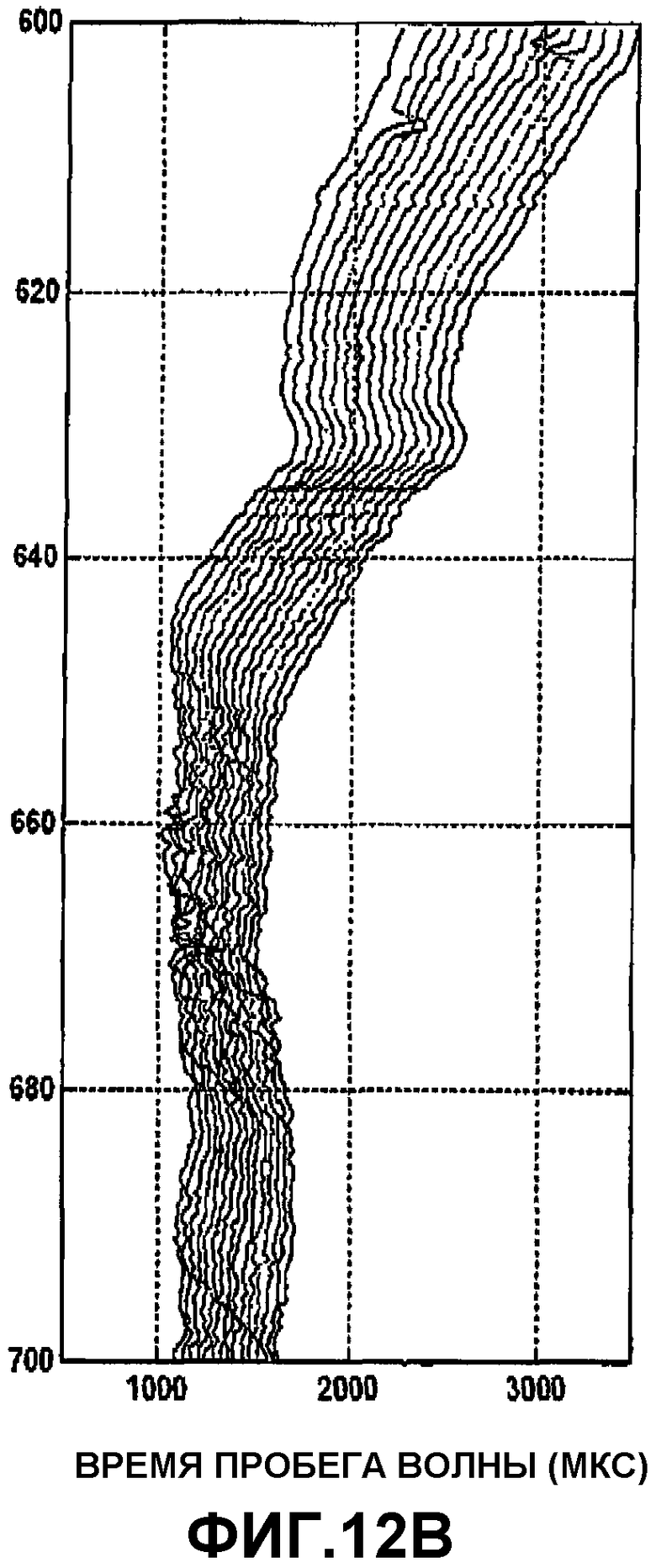
фиг.12А-12В - иллюстрация улучшения данных о первых появлениях по сравнению с предшествующим уровнем техники, достигаемого путем применения принципов настоящего изобретения;
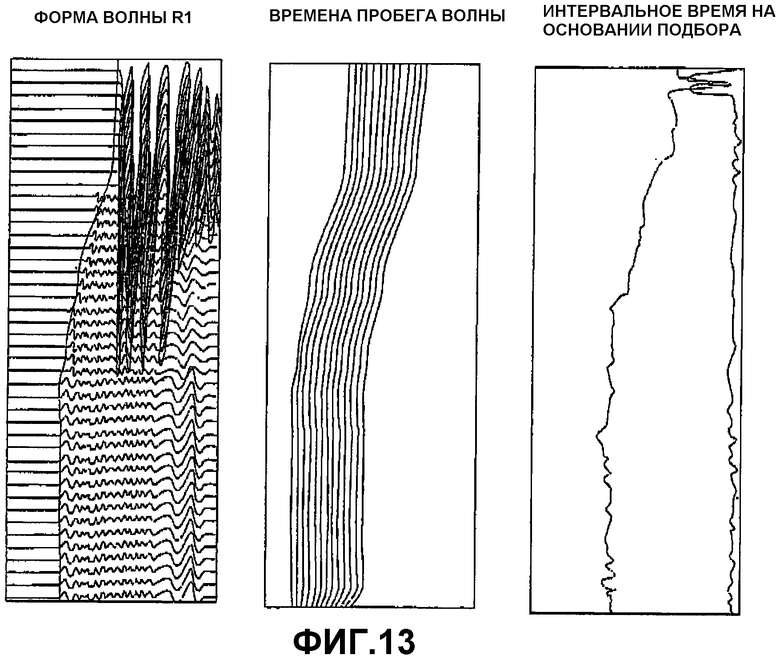
фиг.13 - иллюстрация применения способов настоящего изобретения при полевых испытаниях;
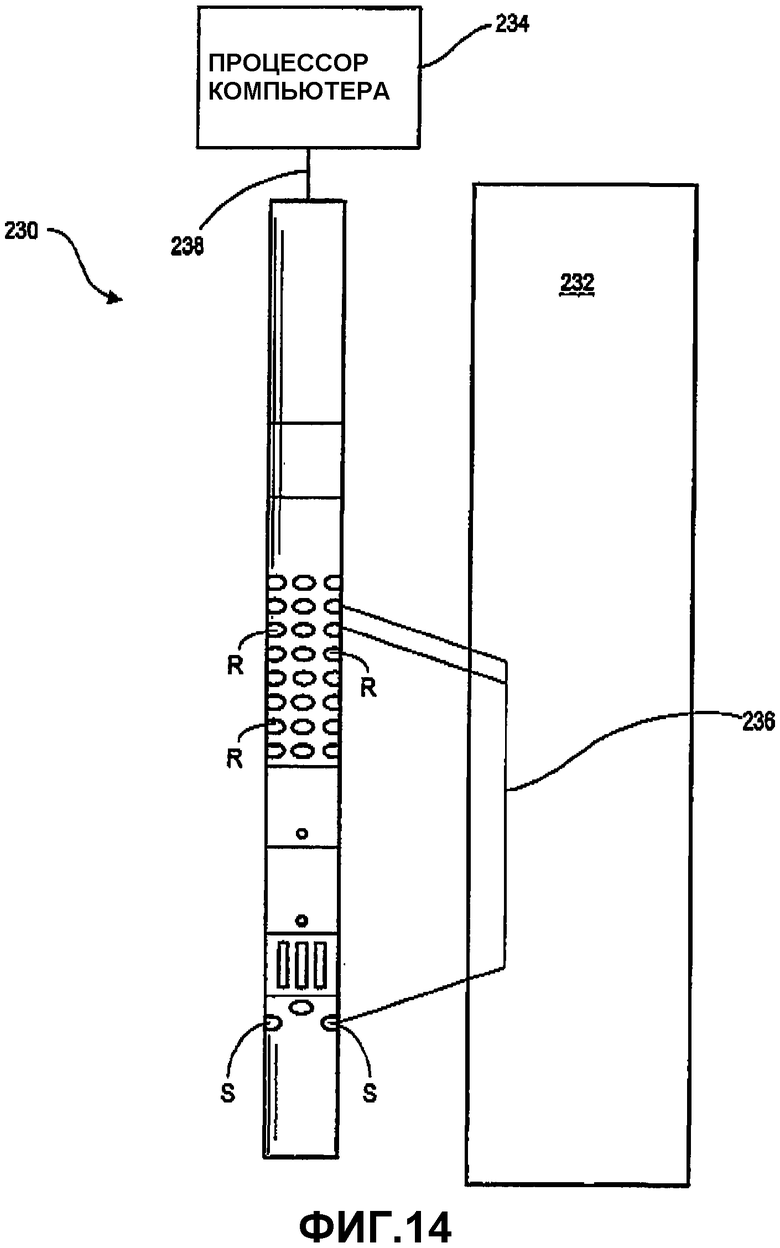
фиг.14 - вид сбоку каротажного зонда и относящегося к нему наземного оборудования согласно одному варианту осуществления настоящего изобретения;
фиг.15 - иллюстрация примера применения функции локализации согласно настоящему изобретению для определения окна или зоны, содержащей первое появление; и
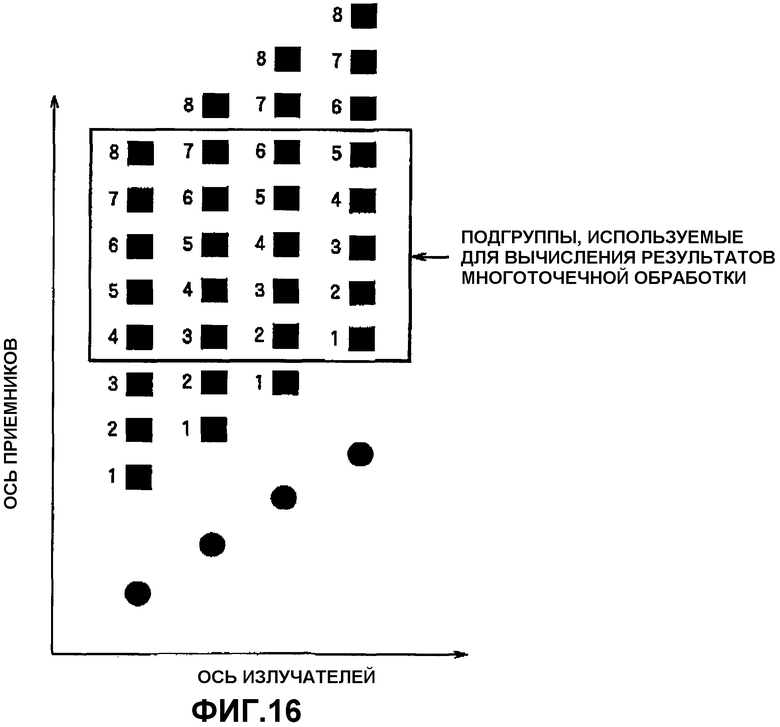
фиг.16 - иллюстрация избыточности информации, полезной при высокоразрешающем каротаже.
На всех чертежах идентичными позициями обозначены аналогичные, но необязательно идентичные, элементы.
Подробное описание предпочтительных вариантов осуществления
Иллюстративные варианты осуществления и объекты изобретения описываются ниже. Конечно, должно быть понятно, что при разработке любого такого реального варианта осуществления для достижения конкретных целей разработчика, таких как удовлетворение системных и связанных с деловой активностью ограничений, должны приниматься многочисленные специфические для реализации решения, которые будут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такая опытно-конструкторская разработка может быть сложной и требующей больших затрат времени, но тем не менее будет обычной процедурой, выполняемой обычными специалистами в данной области техники, имеющими преимущество от этого раскрытия.
Предметом настоящего изобретения предусматривает автоматическое обнаружение первых вступлений или первых появлений компонентного сигнала, представляющего интерес. Как упоминалось выше, исторически сложилось так, что первые вступления могут быть точно обнаружены только при использовании многочисленных параметров, которые должны корректироваться во время каротажных работ. До принципов, описанных в настоящей заявке, точная запись данных о первых вступлениях не могла быть выполнена автоматически. Настоящим изобретением предоставляются способы и системы для каротажа подземного пласта с автоматическим обнаружением первых вступлений компонентных сигналов, представляющих интерес, получением качественных данных о первых вступлениях, которые могут быть использованы для оценивания медленности пласта. Способы и системы могут быть особенно хорошо подходящими для акустического скважинного каротажа посредством акустического каротажного зонда. Однако способы и системы, представленные в настоящей заявке, не ограничены таким образом. Например, способы и системы могут быть использованы для получения каротажных диаграмм удельного сопротивления, вертикальных сейсмических профилей, при регистрации времени пробега от поверхности до известной глубины или при других практических применениях, таких как каротаж в процессе бурения (КПБ), измерение в процессе бурения (ИПБ), постоянный контроль, периодический контроль, слежение за трещинами (включая контроль гидравлического разрыва пласта), контроль температуры и контроль давления. В более широком смысле способы, описанные в настоящей заявке, могут быть также применены к измерениям, относящимся к подземным нефтегазоносным коллекторам, например в аппаратуре поверхностной сейсморазведки на суше, море или в переходной зоне. Кроме того, специалисты в данной области техники, имеющие преимущество от этого раскрытия, должны понимать, что данные о первых вступлениях могут быть полезными при обработке многих видов, включая, но без ограничения ими: зонирование при оптимальном оценивании медленности пласта (математическое обеспечение для оптимального оценивания медленности пласта можно получить от Schlumberger), обработку Isonic (торговая марка Schlumberger), исследование медленности с высоким разрешением и т.д.
Использованные на протяжении описания и в формуле изобретения термины «первое появление», «первое вступление» и «первое движение» относятся к самому раннему вступлению волны, распространяющейся от источника энергии к приемнику в стволе скважины. Источник энергии может быть скважинным или он может быть на поверхности. «Каротаж» означает регистрацию результатов измерений одной или нескольких физических величин в скважине или вокруг нее в зависимости от глубины или времени или от обоих и включает в себя, но без ограничения ими: акустический каротаж, каротаж удельного сопротивления, получение вертикальных сейсмических профилей, регистрацию времени пробега от поверхности до известной глубины, каротаж в процессе бурения (КПБ), измерение в процессе бурения (ИПБ), постоянный контроль, периодический контроль, слежение за трещинами (включая контроль гидравлического разрыва пласта), контроль температуры и контроль давления. «Автоматический» означает способность получать желаемый результат без вмешательства человека или без всяких исходных или изменяемых параметров. «Согласованное обнаружение» относится к надежному и уверенному обнаружению, так что способы последующей обработки могут быть непосредственно применены к данным и/или данные могут быть отчасти обработаны на площадке скважины без затрат или временной задержки на передачу данных в центр обработки. Слова «включающий» и «имеющий», использованные в описании, в том числе в формуле изобретения, имеют то же самое значение, что и слово «содержащий». Слово «акустический» охватывает частоты обычных акустических зондов, а также частоты, используемые в сейсмических приборах и аппаратуре.
В соответствии с принципами, описанными ниже, способы и системы для обнаружения первого вступления или движения автоматически обеспечивают быстрое получение точных, надежных результатов при небольшом количестве входных параметров пользователя или без них. Кроме того, способы и системы являются робастными и работают почти при всех или при всех скважинных условиях. Как упоминалось выше, в прошлом, чтобы обеспечить точность данных о первых движениях, для обнаружения первого движения требовалось множество входных параметров, многие из которых или все не всегда было просто установить. Многие различные параметры, связанные с современными способами обнаружения первых вступлений, не всегда относятся к интуитивной физике, и поэтому очень трудно получать точные данные о первых вступлениях без помощи дорогостоящего эксперта. В соответствии с этим способы и системы, предназначенные для получения качественной информации о первых движениях без вмешательства оператора, рассматриваются ниже. Сначала обсуждаются детали способа обнаружения первых появлений для одной формы волны с последующим рассмотрением использования информации о массиве для обнаружения первых появлений. Однако в соответствии с принципами настоящего изобретения способы в принципе могут быть применены к индивидуальным формам волны без необходимости информации о всем массиве, а для уменьшения необходимых ресурсов компьютерной обработки и без использования какой-либо внешней информации.
До применения любых способов к данным о формах волны может быть важным анализ качества самих форм волны. То есть, может быть важным обнаружение форм волны, которые содержат избыточный шум, выбросы или другие особенности, которые могут иметь тенденции к созданию проблем при обработке данных о формах волны. Поэтому согласно некоторым аспектам изобретения качество форм волны контролируют до того, как их обрабатывают для получения оценок данных о первых вступлениях и медленности. Однако желательно иметь показатели качества, доступные на площадке скважины, и чтобы контроль качества был робастным, не требующим многого в отношении вычислительных ресурсов. В соответствии с некоторыми аспектами настоящего изобретения несколько различных способов контроля качества могут быть применены к данным о формах волны, в том числе, но без ограничения ими: обнаружение согласованных форм волны в массиве; обнаружение ограниченных форм волны; обнаружение избыточного шума в формах волны; и обнаружение выбросов в форме волны. Каждый из этих способов описывается довольно подробно ниже.
Несогласованная форма волны представляет собой форму волны, которая существенно отличается от других. Несогласованная форма волны может иметь высокую или низкую амплитуду по сравнению с другими в массиве, она может иметь иную конфигурацию и т.д. Несогласованные формы волны могут оказывать нежелательное воздействие и существенно понижать когерентность данных об обнаружении первых движений. Поэтому согласно некоторым аспектам настоящего изобретения несогласованные или «некачественные» формы волны отбрасывают до этапа обработки.
Согласно некоторым аспектам настоящего изобретения «опорную форму волны» находят и сравнивают с каждой индивидуальной формой волны в массиве. Рассмотрим сигнал s(t) длительностью L, где t является переменной времени, а S(k) его преобразование Фурье. Массив форм волны определяется как AM(k)=S1(k)∪S2(k),…SM(k), где М является числом форм волны массива. «Опорной формой волны» считается медиана форм волны в массиве:

После определения опорной формы волны можно выполнить сравнение и оценку каждой индивидуальной формы волны с опорной формой волны. В идеальном случае может быть выполнен мультикогерентный анализ форм волны массива, однако такое вычисление может быть слишком дорогостоящим для реализации на площадке скважины, и поэтому в настоящее время является предпочтительным использование опорной формы волны. После вычисления опорной формы волны для каждой индивидуальной формы волны в массиве вычисляют отношение когерентности в виде:

Согласно некоторым аспектам изобретения форма волны считается несогласованной, если Ci меньше, чем предварительно заданный порог. Например, форма волны считается несогласованной, если Ci<γ. Значение γ основано на модели, описываемой ниже. При рассмотрении массива форм колебаний акустической волны, вычисленных путем использования программы моделирования (например, Green 3D), одну форму волны возмущают случайным образом, чтобы определить влияние возмущения на результат анализа методом подобия. Для каждой реализации этого процесса вычисляют эталонные трассы, равно как и значение когерентности для каждой формы волны. Результат этого анализа свидетельствует о том, что критерий согласно уравнению (2) указывает на некачественные формы волны в случае, когда Ci<γ, а значение γ приблизительно равно 0,35.
Кроме того, в случае ограниченных форм волны могут возникать проблемы при обработке массивов форм волны. Эффект «ограничения» обычно обусловлен амплитудой сигнала, которая насыщает электронное устройство, вызывая усечение регистрируемой формы волны. Ограниченные формы волны могут быть относительно легко обнаружены, поскольку они являются «плоскими» при взятии нескольких последовательных отсчетов и часто соответствуют максимальной амплитуде, которая может быть зарегистрирована электроникой. Поэтому один способ обнаружения ограниченных форм волны заключается в сравнении амплитуды зарегистрированных сигналов форм волны с предельными значениями регистратора аппаратных средств. Однако такой способ обнаружения является зависимым от используемых аппаратных средств, а предельные значения аппаратных средств не всегда известны локальному пользователю или в вычислительном центре.
Поэтому согласно некоторым аспектам настоящего изобретения ограниченные формы волны обнаруживают независимо от аппаратных средств, используемых для регистрации форм волны. При рассмотрении сигнала s(t) длительностью L, где t является временем, первый этап включает в себя получение оценки глобального максимума сигнала формы волны. Возможно, что каждый из нескольких отчетов сигнала формы волны будет иметь максимальное значение. Поэтому необходимо отличать сигналы с максимальными значениями от отсчетов, относящихся к постоянному току (DC). Поскольку часть формы волны, которая является ограниченной, имеет постоянное значение, равное максимуму сигнала, ограниченная форма волны (Clipp) определяется как:

Согласно уравнению (3), если несколько последовательных отсчетов являются одними и теми же и равными, то имеется ограниченная часть формы волны. Уравнение (3) также может быть применено ко всей выборке форм волны, а не только к точкам максимальной амплитуды. Уравнение (3) обеспечивает возможность идентификации ограниченных форм волны и указывает на то, что при регистрации информации, возможно, была сделана ошибочная выборка данных.
Кроме того, согласно некоторым аспектам настоящего изобретения в форме волны может быть обнаружен избыточный шум. Рассматривая сигнал s(t) длительностью L, где t является временем, оценивают отношение сигнала к шуму (С/Ш) для формы волны, чтобы определить, будет или нет форма волны полезной для последующей обработки. Вычисляют соотношение между сигналами, измеренными до и после ожидаемого первого вступления. Этот стандартный подход в большинстве случаев обеспечивает получение хорошей оценки отношения сигнала к шуму для рассматриваемой формы волны в предположении белого гауссова шума. Математически вычисляют следующую величину:

где: L - полная длительность сигнала; и τ - временная точка, которая отделяет часть ([0,τ]) сигнала формы волны, относящейся к шуму, от части ([τ+1,L]) сигнала, относящейся к сигналу, представляющему интерес. Временную точку τ оценивают как Tr∗минимальная медленность, где Tr определяется как расстояние между излучателем и рассматриваемым приемником. Минимальная медленность соответствует скорости, до которой никакое вступление не может появиться на рассматриваемых датчиках. В случае монопольных сигналов минимальная медленность составляет приблизительно 40 мкс/фут.
Использование приведенного выше соотношения обеспечивает возможность реализации обработки в реальном времени, которая важна для вычисления медленности на площадке скважины. После вычисления отношения из уравнения (4) отношение сигнала к шуму (С/Ш) вычисляют как:

Вычисление оценки отношения сигнала к шуму для формы волны представляет собой простой процесс определения того, будет или нет форма волны полезной для обработки. Согласно некоторым аспектам изобретения форму волны при отношении сигнала к шуму ниже или равном 3,0 считают некачественной формой волны, хотя согласно некоторым вариантам осуществления отношение сигнала к шуму, составляющее 2,0 или ниже, иногда может считаться хорошим. Поэтому согласно одному аспекту изобретения используют способ контроля качества путем вычисления отношения сигнала к шуму для каждой формы волны и исключения форм волны при отношении сигнала к шуму ниже или равном 3,0. Кроме того, согласованность отношения сигнала к шуму во всем массиве форм волны является показателем согласованности зарегистрированных данных.
Также может оказаться желательной защита данных о формах волны от выбросов. В идеальном случае выброс рассматривают как добавление к исходному сигналу функции Дирака с амплитудой, равной по меньшей мере максимуму исходного сигнала. Поэтому выброс может быть обнаружен как вступление волны с более высокой амплитудой по сравнению с другой частью сигнала. Для обнаружения такого выброса находят метрическую функцию, определяющую местоположение и амплитуду вступления выброса. Важно знать местоположение выброса в форме волны, поскольку выброс можно скорректировать, например, путем простой интерполяции.
Применительно к сигналу s(t), задают в следующем виде критерий, который согласно настоящему изобретению может быть использован для обнаружения выброса в форме волны, требующий очень небольших вычислительных ресурсов:
где: Т - размер окна; L - длительность сигнала; и α - коэффициент регуляризации. Размер Т окна такой же, который используют для окна интегрирования, обычно используемого при обработке методом подобия, и поэтому является переменной, зависящей от типа рассматриваемой волны. В критерии (6) используются хорошо известное энергетическое отношение и вычисление энергетической функции. Критерием (6) обнаруживаются различные вступления, имеющиеся в сигнале формы волны. Когда неожидаемый сигнал появляется в форме волны, критерий (6) указывает на повышение амплитуды, свидетельствующее о наличии и местоположении потенциального выброса в анализируемом сигнале формы волны.
После того как местоположение потенциального выброса в сигнале формы волны определено, рассматривают амплитуду текущего отсчета данных и сравнивают ее с амплитудами остальных отсчетов формы волны. Поэтому могут быть выбраны два окна, до и после точки, представляющей интерес, и выполнена проверка на статистический критерий для определения того, будет ли точка, представляющая интерес, выбросом или не будет. Например, для определения того, будет или не будет отброшен обнаруженный выброс, может быть использован статистический критерий, подробно описываемый ниже со ссылкой на фиг.5.
При наличии качественных данных о формах волн настоящим изобретением предоставляются способы и системы для обнаружения первых вступлений компонентных сигналов, представляющих интерес. Однако в отличие от известных способов и систем способы и системы, описываемые в настоящей заявке, могут обеспечивать согласованное обнаружение первых вступлений по формам волны даже в случае, когда часть компонентного сигнала, представляющего интерес, является относительно слабой по сравнению с шумовой частью форм волны. Например, в соответствии со способами и системами, описываемыми в настоящей заявке, могут быть обнаружены первые вступления по форме волны, имеющей относительно небольшое отношение сигнала к шуму, составляющее ниже, чем 13 дБ (сигнала, представляющего интерес, в сопоставлении с шумом). На самом деле в соответствии с принципами настоящего изобретения первые вступления являются согласованно обнаруживаемыми по формам волны, имеющим отношение сигнала к шуму 10 дБ или ниже, 5 дБ или ниже или даже 3дБ или ниже. Способы и системы, описываемые в настоящем изобретении, аналогичны способам, используемым экспертами, наблюдающими первые вступления в форме волны. Однако в соответствии с настоящим изобретением нет необходимости в дорогостоящем эксперте. Обычно эксперт пытается визуально определить место, где должно быть первое вступление, чтобы иметь грубую оценку возможной локализации первого появления. Хотя каротажные работы продолжаются, он не пытается тщательно обнаружить точное местоположение первого появления. Эксперт наблюдает за зоной, внутри которой, как он уверен, находится первое появление. Способ грубого определения местоположения зоны или окна, в пределах которого находится первое появление, в настоящей заявке называется способом «локализации».
После изучения расположения первого появления эксперт пытается установить точное местоположение первого появления компонентного сигнала, представляющего интерес, путем визуального сканирования зоны локализации. Точное определение точки, задающей точное или почти точное местоположение первого появления, в настоящей заявке называется «обнаружением». После обнаружения первого появления для одной формы волны, эксперт обычно делает то же самое для всех форм волны из массива. Обычно он осуществляет визуальную корреляцию во всем массиве, чтобы увидеть и, если он может, оценить приблизительный наклон, относящийся к медленности компоненты, представляющей интерес, на основе обнаружения первого появления. В течение визуального просмотра во всем массиве форм волн он следит за формами волны, некачественными или с выпадающими значениями, и первыми появлениями и осуществляет контроль качества или исключает их. В дополнение к этому эксперт может контролировать качество первого движения в зависимости от глубины для обеспечения гарантии качества получаемых результатов во второй области (временная является первой).
Однако вместо использования эксперта в соответствии с принципами настоящего изобретения первые появления компонентных сигналов, представляющих интерес, обнаруживаются автоматически в одной форме волны или в массиве их при автоматической локализации или нахождении зоны или окна, содержащего первое появление, автоматическом нахождении точной оценки местоположения первого появления в пределах окна, автоматическом контроле во всем массиве (если анализируется массив, а не одна форма волны) для определения согласованности во всем массиве с целью оценивания медленности обнаруженной компоненты, представляющей интерес, или автоматическом контроле качества времен пробега волны первого вступления. Каждый из этих принципов подробно рассматривается ниже. Применением изобретения автоматически обеспечиваются качественные данные о первых вступлениях.
Как упоминалось выше, локализация первого появления компонентного сигнала, представляющего интерес, включает в себя выбор зоны или области, в пределах которой имеется первое появление. Точное местоположение первого появления не определяется сразу же. Вместо этого находится зона, в которой достоверно содержится первое появление компонентного сигнала, представляющего интерес. В соответствии с принципами настоящего изобретения зону вычисляют, используя функцию локализации.
Использование функции локализации повышает точность последующего обнаружения благодаря минимизации влияния шума и/или других вступлений, которые не являются интересными. Например, вступление поперечной волны может представлять интерес, а локализация первого вступления поперечной волны исключает или уменьшает возможность случайного обнаружения вступления продольной волны. В дополнение к этому локализация обеспечивает возможность снижения времени вычислений точных местоположений первых появлений. Обнаружение фокусируется вокруг первого появления, представляющего интерес, и при этом минимизируется время вычислений за счет исключения необходимости сканирования всей формы волны. Кроме того, благодаря локализации каротажные работы можно выполнять значительно быстрее, чем это было возможно ранее. После того как зона локализации вычислена, с целью решения многочисленных задач каротажный зонд можно переместить на другую глубину без продолжения дальнейшего сбора сегментов формы волны, поскольку известно, что принятая форма волны содержит первое появление, представляющее интерес. В большей части каротажных работ скорость каротажа ограничена скоростью передачи информации телеметрическим путем от зонда на поверхность. Чем дольше собирают формы волны, тем дольше каротажный зонд должен оставаться на одном местоположении для передачи данных телеметрическим путем вверх по стволу скважины. Однако согласно некоторым вариантам осуществления этапа локализации может не быть, и посредством способа можно обнаруживать первые появления, представляющие интерес, путем анализа всей формы волны. Тем не менее предпочтительно, чтобы каждая форма волна в массиве был обработана методом окна для минимизации вычислений точных или почти точных местоположений первых вступлений, представляющих интерес.
Согласно некоторым аспектам изобретения формы волны локализуют с помощью метрической функции, посредством которой автоматически определяется зона, содержащая первое появление. Согласно некоторым аспектам функция основана на вычислении хорошо известного энергетического отношения, которое иногда используют для непосредственного обнаружения первых вступлений. Однако стандартное энергетическое отношение является высоко чувствительным к поздним энергетическим вступлениям и обычно приводит к ошибочным обнаружениям. Поздние энергетические вступления вносят возмущение в обнаружение первого появления, и обнаружение первого появления в форме волны ошибочно происходит в более позднее время. Поэтому согласно некоторым аспектам настоящего изобретения функция локализации основана на энергетическом отношении в качестве ядра вычисления, но умножается на коэффициент регуляризации или демпфирования для исключения или минимизации эффекта поздних вступлений. В формуле (7) ниже представлено выражение для функции локализации, используемой согласно одному способу для определения окна.
при этом


и

где: e(u) соответствует огибающей сигнала (Taner M.T., Koehler F. and Sheriff R.E., 1979, “Complex seismic trace analysis”, Geophysics, 44, 1041-1063);
 - среднее значения ряда;
- среднее значения ряда;
τ - точка временного ряда, для которой должно выполняться вычисление;
N - длительность сигнала; и
Mшума - оценка дисперсии шума, при этом Т определяют как первое местоположение во времени, где сигнал может наблюдаться.
На практике для акустической ситуации значение Т определяют как произведение интервального времени пробега, составляющего 40 мкс/фут, и пространства. Это значение Т зависит от типа данных (сейсмических, скважинных сейсмических и т.д.). Значение ω окна основано на содержании основной частотной составляющей в сигнале, представляющем интерес. В данном случае размер окна кратен одному периоду или половине периода сигнала и вычисляется автоматически на основании типа данных и номинальной частоты возбуждения, выбираемой оператором.
Как видно из формулы (7), выражение для энергетического отношения легко распознается, но оно умножено на коэффициент для осуществления обработки сигналов поздних вступлений. В формуле (7) представлен только один из многих коэффициентов, которые могут быть использованы в соответствии с принципами настоящего изобретения для демпфирования сигналов поздних приходов. На фигурах 1А-1С и 2А-2С показаны сравнительные результаты от применения только энергетического отношения и от применения функции (7) локализации для определения первых вступлений. На фиг.1А представлена форма волны. На фиг. 1В представлено применение энергетического отношения к форме волны из фиг.1А. На фиг.1С представлено применение функции (7) локализации к форме волны из фиг.1А. Поскольку сигналы поздних вступлений отсутствуют, применение основного энергетического отношения, показанное на фиг.1В, или применение функции (7) локализации настоящего изобретения, показанное на фиг.1С, дает один и тот же результат для первого появления.
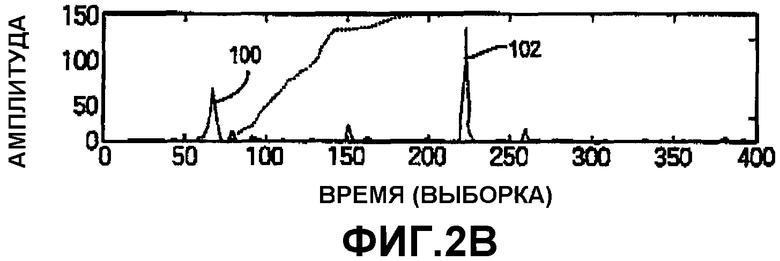
Однако, если имеется позднее вступление, основное энергетическое отношение будет давать неверные местоположения первого появления. На фиг.2А показана другая форма волны, содержащая позднее вступление. На фиг.2В показано применение основного энергетического отношения к форме волны из фиг.2А. В соответствии с использованием основного энергетического отношения позднее вступление (102) преобладает, и поэтому местоположение первого появления представляется в более позднее время по сравнению с его действительным местоположением (100). При вычислении основного энергетического отношения первое вступление (100) не будет обнаружено.
С другой стороны, в случае показанного на фиг.2С применения функции (7) локализации к форме волны из фиг.2А позднее вступление (102) подавляется, а первое появление (100) представляется точно. Определяется только зона возможного вступления, представляющего интерес: 2ω = 1 период сигнала

Сдвиг верхнего предела зоны локализации связан с тем фактом, что при использовании функции (7) локализации имеется тенденция к обнаружению первого вступления раньше действительного первого проявления. Поэтому при небольшом сдвиге зоны этот эффект исключается, и существование первого появления в зоне, представляющей интерес, гарантируется. На фиг.15 показан пример применения функции (7) локализации для определения окна или зоны, содержащей первое появление.
После применения функции (7) локализации к форме волны определяют окно или зону, в которой первое появление несомненно должно быть обнаружено. Поэтому другая составная часть способов настоящего изобретения может быть применена для точного обнаружения первых появлений внутри зоны.
Согласно одному аспекту настоящего изобретения местоположение первого появления обнаруживают путем нахождения точки в пределах окна локализации (если оно определено), до и после которой имеются два различных сигнала. В соответствии с некоторыми аспектами изобретения точка может быть найдена путем статистического анализа формы волны. Например, если компонентный сигнал, представляющий интерес, является вступлением продольной волны, то должен быть шум до точки и сигнал продольной волны (и шум) после точки. Можно обобщить этот подход и считать, что до и после точки обнаружения имеются два различных стационарных временных ряда, которые моделируют сигналы до и после первого появления, представляющего интерес. Поэтому способы обнаружения точки, до и после которой имеются два различных сигнала, не ограничены обнаружением составляющих продольной волны, а могут быть применены для обнаружения любого сигнала, представляющего интерес.
Согласно одному аспекту временной ряд до и после точки обнаружения представляет собой авторегрессионную (АР) модель порядка М с коэффициентами  . Как показано на фиг.3, в этом представлении интервал 1 относится к интервалу до точки, представляющей интерес, рассматриваемой как первое появление, а интервал 2 относится к интервалу после точки, представляющей интерес. Поэтому индекс i определяется как i=∈[1, 2]. Временной ряд {xn; n=1,…N} содержит первое появление компонентного сигнала, представляющего интерес. Этот ряд может быть разложен на два подряда, и каждый может быть выражен в виде авторегрессионной модели:
. Как показано на фиг.3, в этом представлении интервал 1 относится к интервалу до точки, представляющей интерес, рассматриваемой как первое появление, а интервал 2 относится к интервалу после точки, представляющей интерес. Поэтому индекс i определяется как i=∈[1, 2]. Временной ряд {xn; n=1,…N} содержит первое появление компонентного сигнала, представляющего интерес. Этот ряд может быть разложен на два подряда, и каждый может быть выражен в виде авторегрессионной модели:


где: n∈[1,…M] для интервала 1 и n∈[N-M+1,…N] для интервала 2.
Шум  предполагается гауссовым, при этом значение
предполагается гауссовым, при этом значение  , а дисперсия
, а дисперсия  , и он не коррелируется с детерминированной частью временного ряда, то есть
, и он не коррелируется с детерминированной частью временного ряда, то есть 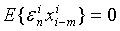 .
.
Первое появление, представляющее интерес, обозначено как p2, поэтому n1=1,…,p2 и n2=p2+1,…,N для рассматриваемых интервалов, показанных на фиг.3. Выше представлены две авторегрессионные модели (формулы (12) и (13)), а модель фонового шума и модель сигнала образуют локально стационарную авторегрессионную модель, предназначенную для оценивания прихода первого появления.
В предположении гауссовых недетерминированных частей приближенная функция l правдоподобия для двух недетерминированных временных рядов на интервале [1, p2] и [p2, N] выражается как:

где:
q0=M(1);
q1=p2-1;
q2=N;
p1=M(1)+1; и
N1=qi-qi-1.
При использовании обозначения  соответствующая логарифмическая функция правдоподобия имеет вид:
соответствующая логарифмическая функция правдоподобия имеет вид:

Максимальная оценка правдоподобия параметров модели имеет вид:

и это уравнение имеет решение:

Путем подстановки уравнения (17) в уравнение (16) логарифмическая функция правдоподобия для оценки  сводится к виду:
сводится к виду:

Для представленного случая предполагается, что порядок модели для обеих моделей, M(i) и p1, известен, однако на практике они вычисляются по данным о принятых формах волны. Чтобы вычислить порядок модели в случае авторегрессионной модели, можно использовать несколько статистических методов. Например, согласно некоторым вариантам осуществления настоящего изобретения используют критерий Акаике (“AIC”). Критерий Акаике (AIC) имеет следующий вид:

(максимизированное правдоподобие = формула (18)). Однако критерий Акаике не может быть оптимальным для выбора порядка модели вследствие недостаточной устойчивости из-за шума, а его дисперсия не стремится к нулю в случае выборки большого размера. Поэтому согласно другим аспектам используют другой статистический метод, называемый минимальной длиной описания. Минимальная длина описания (MDL) определяется как:

где: N - число рассматриваемых выборок.
Критерий минимальной длины описания является робастным независимо от шума и обеспечивает получение лучшей оценки порядка p модели в случае авторегрессионной модели, чем критерий Акаике.
Другим полезным критерием, который может быть использован согласно настоящему изобретению для вычисления порядка модели, является информационный критерий Байеса (“BIC”). Информационный критерий Байеса (BIC) определяется как:

где: N - число рассматриваемых выборок.
После нахождения порядка модели и соответствующих коэффициентов авторегрессии формула (18) становится мерой для соответствия модели. Точка p2, в которой совместная функция правдоподобия является максимизированной или в которой критерий Акаике, критерий минимальной длины описания или информационный критерий Байеса минимизируется, определяет оптимальное разделение двух стационарных временных рядов. Эта точка разделения приводит к наилучшему соответствию для обеих моделей в смысле наименьших квадратов и интерпретируется как начало фазы. Поэтому можно выразить логарифмическую функцию правдоподобия в виде функции точки разделения между двумя временными рядами. Использование критерия Акаике (КА) приводит к вычислению


при этом первое появление соответствует минимуму этой функции, то есть «первое появление» = min[AIC(p2)].
Использование критерия минимальной длины описания (MDL) для обнаружения первого появления приводит к:


В этом случае первое появление будет определяться минимумом функции минимальной длины описания, то есть «первое появление» = min[MDL(p2)].
Точно так же при использовании информационного критерия Байеса (BIC) первое появление будет определяться минимумом функции:


то есть «первое появление» = min[BIC(p2)]. На фиг.4 показано обнаружение первого появления (100) путем нахождения минимума статистической функции, рассмотренного выше.
В соответствии с принципами настоящего изобретения после обнаружения первых появлений для различных форм волны может быть автоматически оценено качество результатов. Иначе говоря, качество обнаружения контролируется как согласованность результатов, полученных для различных форм волны из массива. Используемый в настоящей заявке термин «недостоверное» или «выпадающее» обнаружение определяется как обнаружение, которое не согласуется с общей тенденцией вычисленных результатов. На фиг.5 показаны примеры некоторых недостоверных или выпадающих данных и статистической Z-оценки для каждого обнаружения. Как показано на фиг.5, обнаружения на приемниках (4) и (5) не следуют общей тенденции, что демонстрирует ошибочность или ложность обнаруженных точек. Для исключения выпадающих значений идентификация ложных обнаружений может быть осуществлена с помощью одного из нескольких способов, описанных в настоящей заявке, или другими способами. Однако проблема, связанная с исключением выпадающих значений, заключается в том, что чувствительность к выпадающим значениям сильно зависит от способа, используемого для обнаружения их, и поэтому способ, используемый для нахождения выпадающих значений, может изменять получаемые результаты.
Самые распространенные способы, используемые для обнаружения выпадающих значений, основаны на вычислении стандартного отклонения набора данных. Выпадающие значения часто оценивают как любую точку за пределами некоторого числа стандартных отклонений. Другой подход включает в себя вычисление стьюдентизированных отклонений, определяемых как:
 ,
,
где: x - испытательная точка;
µ - среднее временного ряда; и
σ - стандартного отклонение временного ряда.
Однако обычно способ стьюдентизированных отклонений перестает действовать при наличии нескольких выпадающих значений.
Реальные способы обнаружения выпадающих значений, основанные на стандартном отклонении, имеют и другие недостатки. При смещении среднего µ к выпадающему значению, стандартное отклонение σ завышается, а нормированные отклонения zi часто не являются достаточно большими, чтобы они могли указывать на наличие выпадающих значений. Эти проблемы являются типичными для оценок по методу наименьших квадратов, классу, который включает в себя µ, σ, модели регрессии и многое другое. Поэтому один путь решения указанной выше проблемы заключается в замене среднего µ альтернативной функцией оценки местоположения, которая является менее чувствительной к выпадающим значениям, и стандартного отклонения σ альтернативной масштабной оценочной функцией, которая является менее чувствительной к выпадающим значениям.
Поэтому, чтобы получить более робастный способ обнаружения выпадающих значений, согласно некоторым аспектам настоящего изобретения может быть использована идентифицирующая проверка Хампеля. Применение проверки Хампеля рассмотрено ниже.
С учетом ряда пиков, обнаруживаемых при P={pk}, и медианы этого ряда pψ определяется как:

Масштабная оценочная функция медианного абсолютного отклонения (МАD) вычисляется как:

Значение «медиана·{|pk-pψ|}» представляет собой меру того, насколько далеко точка pk данных обычно находится от эталонного значения pψ. Нормирующий множитель 1,4826 вытекает из того, что номинальная часть последовательности {pk} данных имеет гауссово распределение. При нормировании таким способом PМАО является несмещенной оценкой стандартного отклонения σ. Поэтому согласно некоторым аспектам настоящего изобретения стьюдентизированные отклонения вычисляют как:

Точка pk считается вызывающей подозрение или «выпадающей», если |zk|>3 согласно некоторым вариантам осуществления или если |zk|>2 согласно другим. Описанная выше процедура для идентификации выпадающих значений является робастной и намного более эффективной, чем традиционные способы, основанные на стандартном отклонении. Кроме того, описанная выше процедура является достаточно простой для вычисления, и поэтому ее можно быстро и легко выполнить на площадке скважины при минимальных вычислительных ресурсах.
Применительно к наборам некоторых данных два или более выпадающих значений не удаляются стандартными процедурами, предназначенными для обнаружения выпадающих значений. С достаточной вероятностью обнаруживаются выпадающие значения только с наибольшим смещением. С другой стороны, при использовании процедуры согласно принципам настоящего изобретения, описанной выше, несколько выпадающих значений обнаруживаются и исключаются.
При каротажных работах пользователь может захотеть оценить медленность пласта на основании обнаружения первых вступлении до или после удаления выпадающих значений. Чтобы оценить медленность, прямую линию подбирают к данным о первых вступлениях, используя норму L1. Подбор L1 описывается ниже. На фиг.6 в зависимости от типа нормы, использованной для подбора прямой линии, показаны различные оценки медленности. Как показано на фиг.6, норма L2 чувствительна к возможным выпадающим значениям и поэтому не столь точна, как норма L1. Логарифм медленности, основанный на первых вступлениях, может быть хорошим средством для получения характеристик зон пласта с отнесением, например, к одной из пяти общих категорий и, следовательно, получения сигнала обратной связи в каротажную систему с целью автоматического изменения параметров для вычисления медленности и времени вступления или выполнения других вычислений.
Один способ подбора нормы L1, показанный на фиг.6, описывается ниже. Уравнение для прямой линии выражается как:

Для получения коэффициента линии, определяемого уравнением (31), найдем минимум в соответствии с:

Поэтому решением будет:


В соответствии с этим простым подбором получают оценку медленности пласта, основанную на обнаружении первого движения. Как упоминалось выше, такая информация может быть полезной сама по себе и/или для обработки методом подобия на площадке скважины, когда параметры обработки являются зависимыми от рассматриваемой медленности пласта. Оценка медленности, основанная на обнаружении первого движения, затем может быть использована для отнесения характеристик медленности пласта, например, к одной из пяти общих категорий медленности. После этого характеристика медленности может быть учтена во время этапа обработки методом подобия.
Например, при использовании прибора MSIP (для измерения медленности пласта), который можно получить от Schlumberger, для каротажа пласта обычно имеют массив данных большой протяженности и, возможно, что устройство будет пересекать слоистую среду. В соответствии с этим будет не одно значение медленности, получаемое по данным о первых вступлениях, а, возможно, два, три или более. Поэтому согласно принципам настоящего изобретения при каротаже с высоким разрешением два наклона или больше могут быть подобраны к данным о первых вступлениях для идентификации и получения характеристик вариаций медленности в пласте.
Применительно к зонду с М приемниками в группе разрешение искомого каротажа ограничено размером группы, используемой для регистрации данных. Поэтому разрешение каротажа медленности ограничено числом l приемников, используемых для регистрации данных. Вследствие перекрытия, обеспечиваемого зондом при каротаже, максимальное число подгрупп, посредством которых можно наблюдать один и тот же сегмент пласта, определяется как:

Поэтому в зависимости от разрешения, ожидаемого пользователем, избыточность данных должна использоваться для получения оценок медленности с высоким разрешением. В случае современного акустического зонда группа может содержать восемь приемников с разнесением на 0,5 фута. Если пользователь хочет осуществлять каротаж с разрешением 1 фут, имея пять приемников, он будет использовать N=4 значения медленности для вычисления с высоким разрешением конечного результата каротажа. На фиг.16 показана избыточность информации. В методах из предшествующего уровня техники, предназначенных для получения каротажных диаграмм с высоким разрешением, просто бралось среднее различных значений медленности для получения конечного результата каротажа с высоким разрешением. Однако для обнаружения первых вступлений в соответствии с концепцией настоящего изобретения данные с большой избыточностью обрабатывают более сложным способом.
При использовании робастного подбора (L1) совместно с различными комбинациями доступных данных вычислением медленности для различных комбинаций подгрупп обеспечивается достаточно информации для получения точного подбора. Для обнаружения потенциальных выпадающих значений (то есть ошибочных обнаружений, приводящих к ошибочным оценкам медленности) вычисляют Z-оценку для данных, чтобы пометить любые неудовлетворительные или некорректные точки. Поскольку подбор L1 не очень чувствителен к выпадающим значениям, обнаружение выпадающих значений используется в качестве указания пользователю. На этой стадии повторную обработку не осуществляют.
Однако согласно некоторым аспектам настоящего изобретения после обнаружения первых появлений и нахождения выпадающих значений к формам волны с выпадающими значениями может быть применена процедура повторного обнаружения. Согласно некоторым аспектам изобретения процедура повторного обнаружения все же отличается от исходных способов обнаружения первых вступлений. С учетом того, что оператор может иметь оценку медленности пласта, иллюстрируемую подбором L1, описанным выше, для приемника с ошибочным обнаружением первого вступления должно иметься первое появление, регистрируемое вблизи линии L1 (фиг.7). В идеальном случае первое появление на приемнике должно быть на линии L1, и поэтому согласно вариантам осуществления настоящего изобретения обнаружение ускоряется благодаря уменьшению зоны исследования вблизи линии L1. Чтобы это осуществлялось, зона исследования должна определяться интервалом:
 ,
,
где: Tri - расстояния излучатель-приемник для соответствующих приемников;
i, a и b - параметры подбора линии; и
ω - размер рассматриваемого окна, определяющий зону исследования.
На фиг.10 показано применение принципов обнаружения выпадающих значений и повторного обнаружения, описанных выше. Как показано на фиг.10, первые вступления (104) обнаруживают для индивидуальных форм волны. Подбор прямой линии (106) применяют к первым вступлениям (104) для идентификации выпадающих значений (108, 110). Первую и вторую зоны (112, 114) повторного обнаружения рассматривают при двух размерах окна до линии (106) и при двух размерах окна после линии (106), отражающей идеальное местоположение первых вступлений. При определенных зонах (112, 114) повторного обнаружения ту же самую или аналогичную процедуру, применявшуюся ранее, повторяют, при этом за этапом локализации следует этап обнаружения и контроля качества. Согласно фиг.10 осуществляют последующее повторное обнаружение, повторно обнаруживают первые вступления (116, 118), и выпадающих значений больше нет. Однако, если даже после повторного обнаружения первых вступлений (116, 118) выпадающие значения продолжают существовать, обнаружение выпадающих значений помечают как ошибочное обнаружение и исключают. Согласно некоторым вариантам осуществления для каждого выпадающего значения выполняют только одно повторное обнаружение. Однако согласно другим вариантам осуществления могут быть использованы две процедуры или более процедур повторного обнаружения.
Даже после обнаружения первых появлений и исключения выпадающих значений во временной области может оказаться желательной дополнительная корректировка данных о первых вступлениях путем анализа и подавления выбросов в данных о первых вступлениях в другой области. Например, согласно некоторым аспектам изобретения также может рассматриваться информация относительно оси Z (глубины). Возможна регистрация какого-либо ошибочного обнаружения первого вступления, оставшегося даже после применения способа обнаружения выпадающих значений, такого, как описанный выше. Например, могут быть случаи, в которых обнаружения первых вступлений от всех приемников являются ошибочными для определенной глубины. Кроме того, могут быть несколько ошибочных обнаружений для определенной глубины и только два надежных обнаружения, вследствие чего надежные обнаружения идентифицируются как ошибочные. Поэтому согласно некоторым аспектам настоящего изобретения применяют способ контроля выбросов или выпадающих значений на протяжении глубины ствола скважины.
Ниже описывается один вариант осуществления, предназначенный для обнаружения выпадающих значений в дополнительной области. Первое появление на приемнике i на глубине z обозначим Rti(z). Согласованность обнаружения для одного приемника проверяют для нескольких глубин. Например, могут быть проанализированы данные о первых вступлениях для приемника на глубинах z-1, z и z+1. Конечно, в соответствии с принципами настоящего изобретения может быть выполнено любое число сравнений. Если на интервале [z-1, z и z+1] имеется ошибочное обнаружение первого вступления, некачественному первому появлению по глубине будет соответствовать нереальная вариация по сравнению с другими. Поэтому находят интервал, на котором может быть оценена согласованность (состоятельность) обнаружения первого появления как функция глубины.
Согласно одному варианту осуществления скользящее окно размером L используют для оценивания того, будет или не будет согласованным (состоятельным) обнаруженное первое появление как функция глубины. Согласно некоторым вариантам осуществления окно L равно приблизительно одной длине группы. В пределах окна L находится ряд, включающий в себя первое появление
PRti={Rti(zk)}ke[1,L]. Снова задача заключается в обнаружении и фильтрации возможных выпадающих значений. Поэтому согласно некоторым вариантам осуществления такой же статистический критерий, как описанный выше, применяют к обнаружениям первых появлений как функции глубины. То есть, вычисляют Z-оценку для всех данных и измеряют по отношению к порогу Z-оценку для каждого обнаруженного первого появления в пределах скользящего окна. Этот способ контроля состоятельности в зависимости от глубины может быть применен к каждому датчику, а возможные проблематичные обнаружения помечают и повторно обнаруживают, предпочтительно только один раз. Затем помеченное ошибочное обнаружение корректируют путем осуществления интерполяции между надежными точками данных. Каждое скорректированное обнаружение первого появления может быть визуально помечено для информирования оператора о том, что данное обнаружение является не действительным обнаружением, а скорректированным обнаружением.
На фиг.8 показан принцип подавления выбросов в дополнительной области. Согласно фиг.8 данные об обнаружении первых движений показаны в зависимости от глубины и включают в себя многочисленные выбросы (120). Каждый из многочисленных выбросов (120) помечают, а первое движение повторно обнаруживают в проблематичных областях с выбросами. Как показано, после повторного обнаружения могут сохраниться несколько повторно обнаруживаемых выбросов (122). Поэтому, как описано выше, оставшиеся повторно обнаруженные выбросы (122) удаляют и корректируют (например, путем интерполяции) посредством подавляющего выбросы фильтры.
Выше были описаны несколько аспектов способов и систем для каротажа, в том числе конкретные примеры. Один пример общих принципов для способов, описываемых в настоящей заявке, показан на фиг.9 в виде блок-схемы последовательности операций. На фиг.9 представлено несколько этапов, которые могут быть применены к данным о формах волн для состоятельного обнаружения первого движения по компонентным сигналам, представляющим интерес, на основании данных о формах волны, имеющих отношение сигнала к шуму даже 10 дБ или ниже, 5 дБ или ниже или 3 дБ или ниже (сигнала, представляющего интерес, в сопоставлении с шумом). Применение различных этапов, представленных на блок-схеме последовательности операций, показано на фигурах 10-11. Фиг.10 упоминалась выше, и на ней показаны обнаружение первых появлений в нескольких формах волны, идентификация выпадающих значений, повторное обнаружение и нахождение конечных времен пробега волны. На фиг.11 показаны локализация формы волны с целью определения зоны поиска, в которой содержится первое появление, и применение статистической функции к зоне поиска для нахождения точного или почти точного местоположения первого появления, при этом показано, как способами, описанными в настоящей заявке, гарантируется обнаружение корректного первого появления (в данном случае Е1, а не Е2).
На фигурах 12А-12В показано улучшение, достигаемое для данных о первых появлениях по сравнению с предшествующим уровнем техники путем применения способов, описанных выше. На фиг.12А показаны данные об обнаружении первых движений, основанные на данных о реальных формах волны, полученные путем использования способов из предшествующего уровня техники без какого-либо вмешательства пользователя или задания параметров. Как видно, обнаружение первых вступлений путем использования предшествующих способов является несостоятельным. Предшествующими способами просто нельзя состоятельно обнаруживать первые вступления без корректировки экспертом во время каротажных работ, когда результаты измерений содержат компонентный сигнал с отношением части сигнала, представляющего интерес, к шумовой составляющей ниже, чем 13 дБ. Однако, как показано на фиг.12, при использовании способов согласно принципам настоящего изобретения, описанных выше, первые вступления обнаруживаются состоятельно, даже в случае компонентных сигналов, представляющих интерес, которые являются относительно слабыми по сравнению с шумом.
Точно так же на фиг.13 показаны результаты полевых испытаний по применению способов, описанных в настоящей заявке. Исходные данные (формы волны) показаны слева. Следствием применения способов, описанных выше, для обнаружения первых появлений являются качественные данные, показанные справа от форм волны. В таком случае на основании данных о первых вступлениях могут быть выполнены оценки медленности, показанные справа от данных о временах пробега волны. Оценка медленности иллюстрирует подбор L1, описанный выше, а график медленности также иллюстрирует функцию (Е) ошибок.
Как упоминалось выше, согласно некоторым аспектам настоящего изобретения способы и системы, описанные в настоящей заявке, обеспечивают получение робастных, точных, полезных данных о первых движениях без каких-либо входных параметров или вмешательства пользователя с помощью относительно простого процесса, для которого требуются очень небольшие вычислительные ресурсы. Способы и системы, описанные в настоящей заявке, обеспечивают получение очень больших преимуществ перед предшествующими способами, для которых требуется существенное вмешательство пользователя с целью соответствующего задания и изменения входных параметров для получения качественных данных об обнаружении первых движений.
До этого места описания внимание было направлено в основном на обнаружение первых вступлений почти без рассмотрения других компонент, присутствующих в форме волны (за исключением шума). То есть, не предполагалось, что они имеются в формах волны рассматривавшегося вида. Однако имеются несколько путей, в соответствии с которыми принципы настоящего изобретения могут быть применены для обнаружения первых вступлений других компонент, присутствующих в форме волны. Некоторые из этих различных возможностей представлены ниже.
Один из способов, описанных в настоящей заявке, включает в себя использование функции локализации для нахождения первого появления другой компоненты. Один способ нахождения первого вступления другого компонентного сигнала, представляющего интерес, заключается в повторном осуществлении способа, использованного для нахождения исходного первого вступления, начиная с сигнала исходного первого вступления и принимая во внимание то, что нет сигналов, представляющих интерес, до местоположения исходного первого вступления. Применение тех же самых процедур, что и описанных выше, обеспечивает обнаружение первого движения для второй компоненты, приходящей после исходного первого вступления. Другие компонентные сигналы также могут быть обнаружены путем продолжения этого процесса на протяжении всей длительности формы волны. Повторение способов нахождения исходного первого вступления с целью нахождения вступлений для дополнительных компонентных сигналов обеспечивает преимущество в виде небольших требований к процессору компьютера.
Однако в другом способе нахождения первых появлений других компонентных сигналов, представляющих интерес, используется иная стратегия. После обнаружения исходного первого вступления медленность исходной компоненты становится известной через посредство подбора L1. Поэтому согласно одному варианту осуществления обнаружение других первых вступлений включает в себя коррекцию за приращение времени пробега форм волны на основании медленности компоненты, обнаруженной при исходном первом появлении. Посредством этой операции выравнивается компонента исходного сигнала, имеющего такую же медленность, как и сигнал, использованный для коррекции данных на основании приращения времени пробега. После повторного выравнивания вычисляют эталонную трассу согласно указанной выше формуле (1). Однако теперь эталонную трассу вычисляют во временной области. После вычисления эталонной трассы ее удаляют из каждой иной трассы, скорректированной, как пояснялось выше, на основании приращения времени пробега. При вычитании эталонной трассы будет приравниваться к нулю часть формы волны, которая относится к исходной обнаруженной компоненте. Поэтому с помощью этого простого преобразования удаляются все сигналы до второй компоненты, представляющей интерес. В соответствии с этим алгоритм обнаружения первого появления может быть повторно применен для нахождения первого вступления второй компоненты, представляющей интерес. Точно так же для третьей компоненты повторяют только что описанную операцию, то есть коррекцию данных за приращение времени пробега на основании вычисления медленности предшествующей компоненты, представляющей интерес, вычисление эталонной трассы, удаление эталонной трассы из данных о формах волны и повторное применение способа обнаружения первого движения. Следует отметить, что данные корректируют на основании геометрического расхождения до применения эталонной трассы. Обнаружение других компонент осуществляют после коррекции данных на основании приращения времени пробега, обусловленного предшествующей компонентой. Следовательно, первое появление корректируют, чтобы получить абсолютное значение, а не относительное значение.
Способы настоящего изобретения, описанные выше, могут быть использованы совместно с каротажными зондами и системами любого типа. Системы согласно настоящему изобретению способны состоятельно обнаруживать первое движение компонентных сигналов, представляющих интерес даже в случае, когда компонентный сигнал, представляющий интерес, является относительно слабым по сравнению с шумом (например, отношение сигнала к шуму составляет 10 дБ или ниже). Для примера обратимся к фиг.14, на которой показан акустический каротажный зонд (230) в непосредственной близости к пласту (232). Акустический каротажный зонд (230) включает в себя источник (S) и по меньшей мере один датчик или приемник (R). В представленном варианте осуществления имеются многочисленные приемники (R) и источники (S). Показанная компоновка источников (S) и приемников (R) является примерной по своей сути, и может быть любая компоновка приемников и/или источников. Приемники (R) и источники (S) соединены с процессором (234) компьютера для сбора и обработки данных от акустического каротажного зонда (230). Кроме того, показана траектория (236), отражающая путь продольной волны, вызванной возбуждением источника (S). Приемники (R) могут быть различных видов, включая, но без ограничения ими, пьезоэлектрические и магнитострикционные приемники. Приемники (R) могут осуществлять обнаружение вступления акустических волн.
Результаты измерений, собранные от акустического каротажного зонда (230), которые могут включать в себя формы волны, формируемые в динамике во времени на приемниках (R), передаются в процессор (234) компьютера по кабелю (238), на котором подвешен акустический каротажный зонд (100), или с помощью любого другого удобного способа связи (например, с помощью телеметрии по гидроимпульсному каналу связи). Процессор (234) компьютера можно получить от широкого круга поставщиков. Акустические данные, получаемые посредством акустического каротажного зонда (230) и принимаемые процессором (234) компьютера, могут быть обработаны в соответствии с инструкциями, доступными для процессора (234) компьютера, с целью осуществления описанных выше способов определения первых появлений и медленности пласта. Предпочтительно, чтобы вычисление медленности пласта осуществлялось процессором (234) компьютера на площадке скважины, хотя вычисления могут быть сделаны на месте, удаленном от площадки, путем использования акустических данных, собранных акустическим каротажным зондом (230).
Предпочтительные варианты осуществления были выбраны и описаны для лучшего пояснения принципов изобретения и практического применения его. Предшествующее описание предназначено для обеспечения возможности другим специалистам в данной области техники использования изобретения согласно различным вариантам осуществления и в различных модификациях, подходящих к предполагаемому конкретному использованию. Предполагается, что объем изобретения будет определяться только нижеследующей формулой изобретения.

Предложенная группа изобретений относится к способам и системам для исследования подземных пластов путем использования акустических или электромагнитных измерений, выполняемых в стволе скважины. Данные изобретения обеспечивают от своей реализации такой технический результат, как упрощение процедуры проведения акустических или электромагнитных измерений и повышение скорости получения требуемых данных. Способ получения результатов измерений подземного пласта, посредством сигнала, распространяемого через пласт, содержит этапы, при которых: принимают сигнал после его распространения через пласт, отбрасывают несогласованную форму волны и определяют первое вступление принятого распространяемого сигнала, при этом этап определения содержит: прием формы волны, представляющей распространяемый сигнал, который включает принятый распространяемый сигнал, включая его первое вступление, определение для точки вдоль формы волны функции правдоподобия, представляющей правдоподобие, что соответствующие части формы волны до и после указанной точки представляет различные сигналы, при этом указанный этап определения правдоподобия включает применение статистической функции для определения точки вдоль формы волны, на которой функция правдоподобия является максимальной, и грубо определяют местоположение упомянутой точки вдоль формы волны, используемой для этапа определения правдоподобия, используя функцию локализации, выдают определенную точку, качестве первого вступления. Указанный способ реализован при помощи соответствующего устройства. 2 н. и 21 з.п. ф-лы, 16 ил.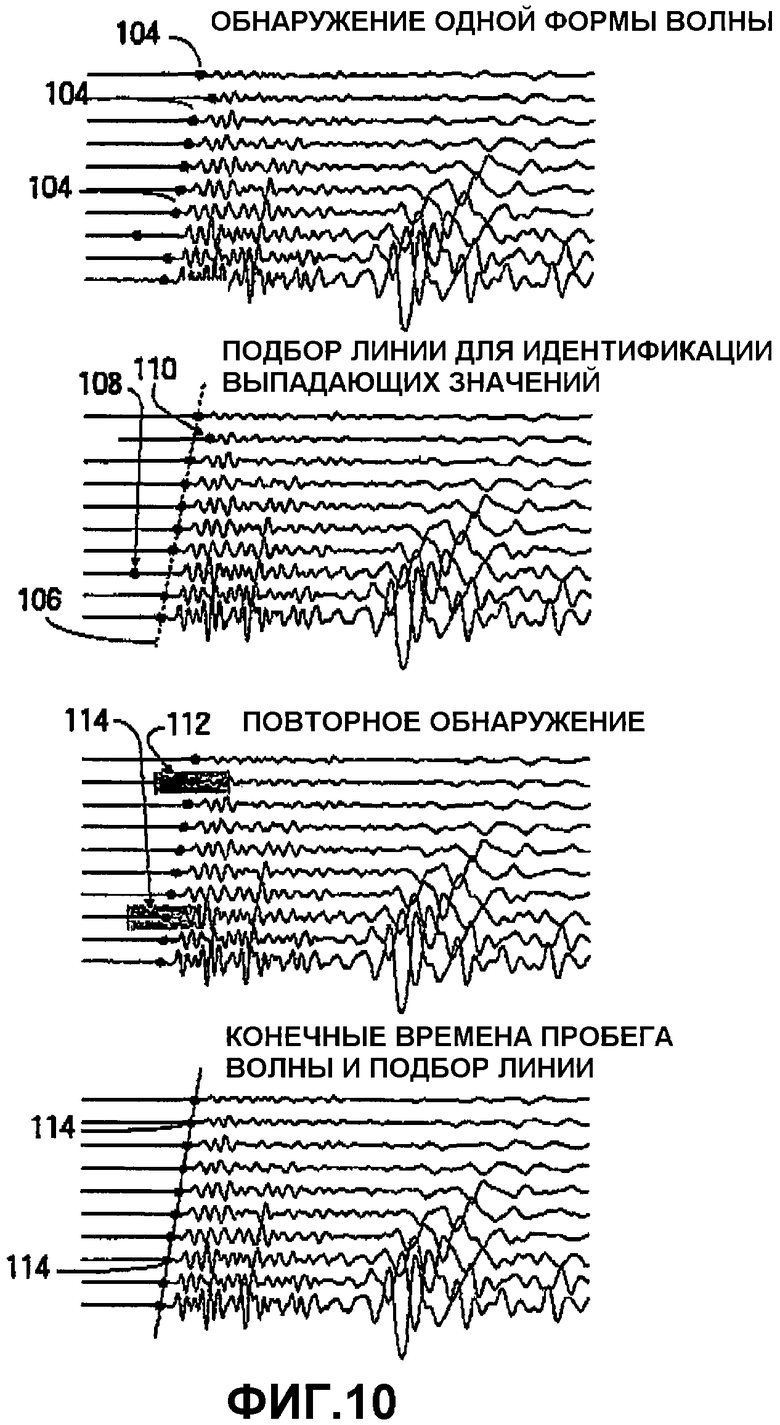
1. Способ получения результатов измерений подземного пласта посредством сигнала, распространяемого через пласт, содержащий этапы, при которых
принимают сигнал после его распространения через пласт, отбрасывают несогласованную форму волны и определяют первое вступление принятого распространяемого сигнала, при этом этап определения содержит
прием формы волны, представляющей сигнал, который включает принятый распространяемый сигнал, включая его первое вступление,
определение для точки вдоль формы волны функции правдоподобия, представляющей правдоподобие, что соответствующие части формы волны до и после указанной точки представляет различные сигналы, при этом указанный этап определения правдоподобия включает применение статистической функции для определения точки вдоль формы волны, на которой функция правдоподобия является максимальной, и грубо определяют местоположение упомянутой точки вдоль формы волны, используемой для этапа определения правдоподобия, используя функцию локализации,
выдают определенную точку в качестве первого вступления.
2. Способ по п.1, в котором различные сигналы задаются как шум и принятый распространяемый сигнал соответственно,
3. Способ по п.1 или 2, в котором дополнительно
формируют окно, содержащее первое вступление распространяемого сигнала, на основании только принятой формы волны; в котором при формировании окна получают энергетическое отношение для формы волны и умножают энергетическое отношение на функцию демпфирования.
4. Способ по п.1 или 2, в котором дополнительно
формируют окно, содержащее первое вступление распространяемого сигнала, на основании только принятой формы волны; в котором при формировании окна исключают сигналы поздних вступлений сигналов.
5. Способ по п.1 или 2, в котором распространяемый сигнал обнаруживают во множестве мест подземного пласта, и первое вступление определяют для каждого из множества мест.
6. Способ по п.5, в котором дополнительно исключают данные с выпадающими значениями из определенных первых вступлений.
7. Способ по п.6, в котором этап исключения содержит
вычисление идентифицирующей проверки Хампеля для первых вступлений, сравнение результата оценки с пороговым значением, и исключение каждого первого вступления с результатом оценки, превышающим пороговое значение или равным ему.
8. Способ по п.6, в котором этап исключения содержит
вычисление идентифицирующей проверки Хампеля на основании первых вступлений, сравнение результата оценки с пороговым значением,
повторное определение времени пробега волны для каждого обнаруженного первого вступления в случае, если результат оценки выше порога или равен ему;
исключение каждого первого вступления идентифицирующей проверкой Хампеля, если результат оценки выше порога или равен ему,
9. Способ по п.6, в котором этап исключения содержит
вычисление идентифицирующей проверки Хампеля на основании первых вступлений, сравнение результата оценки с пороговым значением,
повторное определение времени пробега волны для каждого первого вступления в случае, если результат оценки выше порога или равен ему;
в котором при повторном определении формируют окно относительно ожидаемых первых вступлений на основании частоты принятых сигналов вступлений;
вычисляют идентифицирующую проверку Хампеля на основании повторно определенных первых вступлений,
сравнивают второй результат оценки для каждого повторно определенного первого вступления с порогом;
исключают каждое повторно определенное первое вступление в случае, если новая оценка выше порога или равна ему.
10. Способ по п.1, в котором дополнительно исключают выбросы из формы волны.
11. Способ по п.9, в котором этап исключения содержит следующие операции:
вычисляют Z-оценку для первых вступлений, обнаруженных посредством приемника на нескольких глубинах;
сравнивают Z-оценку е пороговым значением;
исключают первые вступления в случае, если Z-оценки равны или выше порогового значения;
осуществляют интерполяцию между первыми вступлениями в случае, если Z-оценки ниже порогового значения.
12. Способ по п.1, в котором сигнал получается в результате каротажных работ,
13. Способ по одному из пп.1, 2 или 11, в котором сигнал получается в процессе каротажных работ в процессе бурения.
14. Способ по одному из пп.1, 2 или 11, в котором распространяемый сигнал представляет собой акустический сигнал.
15. Способ по п.14, в котором дополнительно оценивают медленность пласта на основании определенного первого вступления акустического сигнала.
16. Способ по п.1, в котором дополнительно
генерируют акустические волны;
принимают акустические волны с помощью приемников каротажного зонда и получают акустические формы волны из указанных приемников;
оценивают медленность на основании определенных первых вступлений и расстояний между приемниками каротажного зонда;
осуществляют характеризацию медленности для зон пласта на основании оценки медленности;
обрабатывают методом подобия акустические формы волн, принятые во внимание при получении характеристик медленности для зон.
17. Способ по п.16, в котором характеризация медленности относится к отнесению оцененной медленности к одной из пяти общих категорий медленности.
18. Способ по п.1, в котором точка, определенная вдоль формы волны, задается выражением: первое появление = min[BIC(p2)], где
BIC - информационный критерий Байеса, р2- точка, определяющая оптимальное разделение двух стационарных временных рядов.
19. Система для получения измерений подземного пласта, содержащая
средство для испускания сигнала в пласт,
средство для приема сигнала после его распространения через пласт, и вычислительное устройство, выполненное с возможностью приема формы волны, представляющей сигнал, который включает принятый распространяемый сигнал, включающий его первое вступление, при этом вычислительное устройство включает инструкции, исполняемые вычислительном устройством для отбрасывания несогласованной формы волны и определения первого вступления принятого распространяемого сигнала, посредством определения для точки вдоль формы волны функции правдоподобия, представляющей правдоподобие соответствующих участков формы волны до и после точки, представляющих различные сигналы, при этом указанное правдоподобие определяется посредством применения статистической функции для определения точки вдоль формы волны, на которой функция правдоподобия является максимальной, и грубо определяют местоположение точки вдоль формы волны, используемой для этапа определения правдоподобия, используя функцию локализации, и выдают определенную точку в качестве первого вступления.
20. Система по п.19, в которой различные сигналы задаются как шум и принятый распространяемый сигнал соответственно.
21. Система по п.19 или 20, в которой указанные инструкции дополнительно включают инструкции для формирования окна, содержащего первое вступление распространяемого сигнала, на основании только принятой формы волны; в котором при формировании окна получают энергетичеекое отношение для формы волны и умножают энергетическое отношение на функцию демпфирования.
22. Система по п.19 или 20, в которой инструкции дополнительно включают инструкции для формирования окна, содержащего первое вступление распространяемого сигнала, на основании только принятой формы волны; в котором при формировании окна исключают сигналы поздних вступлений сигналов.
23. Система по п.19, в которой средство для приема выполнено с возможностью обнаруживания распространяемого сигнала во множестве мест подземного пласта.
| US 3979714 А, 07.09.1976 | |||
| Устройство для автоматической фиксации сигнала при акустическом каротаже скважин | 1978 |
|
SU750413A1 |
| Устройство для акустического каротажа скважин | 1977 |
|
SU693310A1 |
| Устройство акустического каротажа | 1986 |
|
SU1460710A1 |
| Аппаратура акустического каротажа | 1990 |
|
SU1797716A3 |

