Изобретение относится к радиотехнике и может быть использовано для дуплексной передачи информации с временным разделением каналов между низкоорбитальными нестабилизированными космическими аппаратами (КА) и земной станцией (ЗС).
Известен способ передачи дискретной информации, где в зависимости от помеховой обстановки автоматически осуществляется оптимально организованная "временная перекачка" пропускной способности и помехоустойчивости, гарантируя достижения максимально возможного значения средней реализованной скорости передачи информации в условиях воздействия наихудших помех, т.е. при низком среднем уровне помех радиолиния работает с максимальной из заданных скоростью передачи информации без переключении, не реагируя на возможные единичные кратковременные всплески текущего уровня мощности помех, и тем самым реализует максимально достижимую с точки зрения выделенного ресурса значений информационных скоростей пропускную способность. При возрастании уровня помех пропускная способность радиолиний падает, однако возрастает ее помехоустойчивость, т. е. радиолиния переходит на работу с меньшими скоростями. Диапазон возможного изменения информационной скорости (набор скоростей) в адаптивной радиолинии заранее определен (Патент РФ 2010430, МКИ 5 Н 04 В 7/005, 30.03.94).
Недостатком данного способа является повышенное значение энергетического потенциала за счет увеличения длительности информационных импульсов.
Известен способ передачи информации с временным разделением каналов, реализованный в системе передачи-приема информации между низкоорбитальными КА и ЗС, который выбран в качестве прототипа для заявляемого способа.
Данный способ заключается в автоматическом поиске направления связи путем последовательного подключения к входу радиопеленгатора сигналов, поступающих от различных антенных элементов с непересекающимися диаграммами направленности, где принятые по каждому направлению сигналы оцениваются по структуре, и, если последнее соответствует ожидаемой, то далее производится оценка принятого сигнала по уровню мощности с последующим запоминанием. По окончании цикла анализа уровней сигналов выявляется номер антенного элемента, на котором уровень сигнала наибольший. Затем осуществляется переход в режим дуплексного обмена информации по каналу с антенным элементом, имеющим в предшествующем цикле анализа наибольший уровень мощности сигнала. Параллельно производится опрос всех оставшихся антенных элементов, а также отслеживается изменение уровня основного сигнала (Патент РФ 2047908, МКИ 6 G 08 С 15/06, 19/22, 10.11.95).
Недостатком этого способа является то, что в нем не учитываются фактическое отношение сигнал/шум, которое определяет достоверность передачи информации и поворот плоскости поляризации, в результате чего происходит потеря мощности полезного сигнала, что требует увеличения мощности передатчика.
Известна адаптивная радиолиния передачи дискретной информации, которая содержит на передающей стороне манипулятор информационного сигнала, блок приема обратного канала, блок управления и формирователь информационного сигнала, приемная сторона содержит блок передачи обратного канала, демодулятор информационного сигнала, блок выделения кода Брюижна, измеритель дальности, формирователь символов информации, измеритель отношения сигнал/шум, генератор кода Брюижна, блок управления, блок рандомизированного выбора информационной скорости, вычислитель среднего значения отношения сигнал/шум, датчик случайных чисел и генератор тактовых импульсов (Патент РФ 2010430, МКИ 5 Н 04 В 7/005, 30.03.94).
Недостатком данной радиолинии является повышенное значение энергетического потенциала, обусловленное тем, что для повышения отношения сигнал/шум изменяется длительность отрезка передачи информации, которая увеличивается при снижении отношения сигнал/шум.
Известна система для приема и передачи информации, которая взята в качестве прототипа. Данная система дуплексного обмена сообщениями содержит генераторы тактовых импульсов и псевдослучайной последовательности, синтезаторы частот, блоки переключения, передающие и приемные групповые и абонентские блоки, кодер и декодер группового сигнала, устройства относительной фазовой манипуляции и деманипуляции сигнала, радиопередатчик, радиоприемник, генераторы несущей и опорной частот, дешифраторы команд, устройство слежения за задержкой псевдослучайной последовательности, радиопеленгатор, антенно-фидерное устройство (Патент РФ 2047908, МКИ 6 G 08 С 15/06, 19/22, 10.11.95).
Недостатком данной системы является сравнительно низкая достоверность передачи информации, обусловленная тем, что при циклическом вращении КА вокруг какой-либо оси снижается отношение сигнал/шум в каждом периоде вращения КА и не учитывается поворот плоскости поляризации.
Задачей настоящего изобретения является повышение достоверности принимаемой информации и увеличение отношения сигнал/шум путем адаптивного согласования угла поляризации приемной антенны ЗС с углом поляризации принимаемого сигнала с КА.
Данная задача решается тем, что в способе передачи информации с временным разделением каналов, при котором осуществляют автоматический поиск направления связи ЗС с низкоорбитальным КА путем циклического анализа сигналов по структуре и мощности по всем возможным направлениям, выбор направления связи в цикле по максимальному по мощности уровню сигнала при соответствии структуры сигнала ожидаемой, в одном из периодов вращения низкоорбитального КА фиксируют начало и временной интервал, при котором отношение сигнал/шум входного сигнала превышает пороговое значение, и одновременно с этим определяют и запоминают угол поляризации входного сигнала при максимальном значении отношения сигнал/шум. В следующем периоде вращения низкоорбитального КА осуществляют прием-передачу информации с углом поляризации, запомненным в предыдущем периоде и в определенном предыдущем интервале времени превышения отношения сигнал/шум над пороговым.
Данный способ может быть использован в низкоорбитальных спутниковых системах связи с пакетным режимом работы.
Предлагаемый способ реализуется в системе для передачи и приема информации, содержащей генераторы тактовых импульсов и псевдослучайной последовательности, синтезаторы частот, блоки переключения, передающие и приемные групповые и абонентские блоки, кодер и декодер группового сигнала, устройства относительной фазовой манипуляции и деманипуляции сигнала, радиопередатчик, радиоприемник, генераторы несущей и опорной частот, дешифраторы команд, устройство слежения за задержкой псевдослучайной последовательности, радиопеленгатор, антенно-фидерное устройство. В данную систему дополнительно введены блоки дискретного переключения поляризации и управления поляризацией, измерители плоскости поляризации и отношения сигнал/шум, микропроцессор и антенная система.
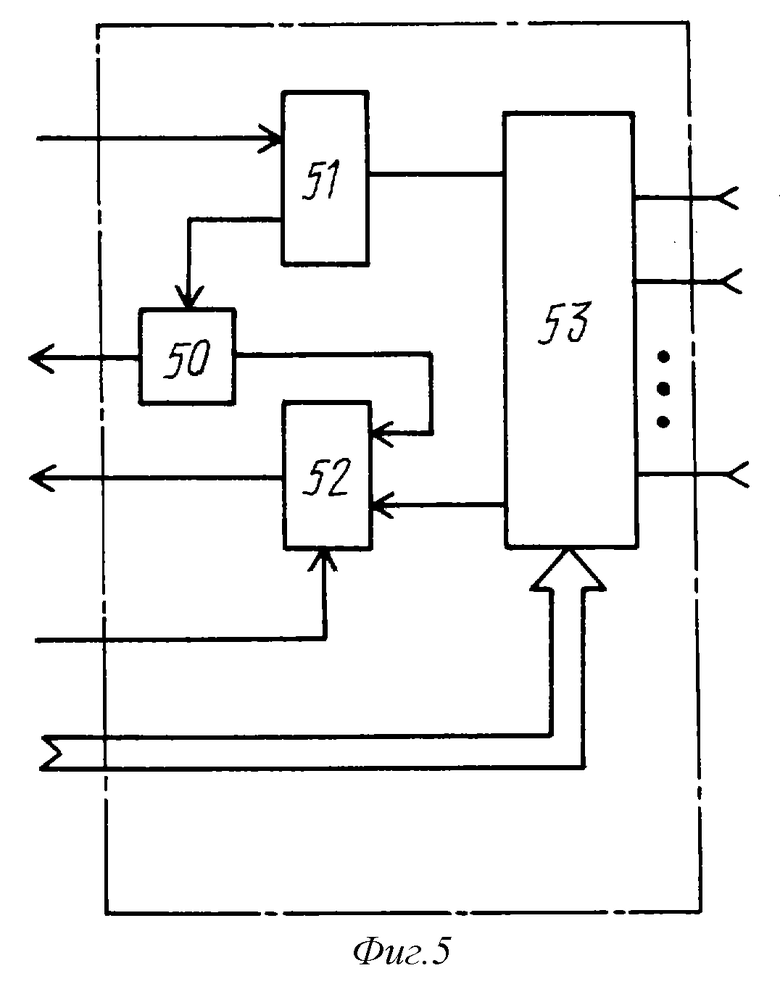
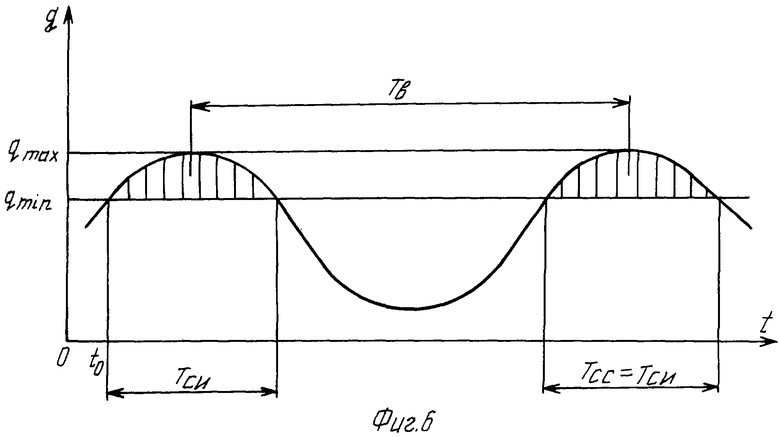
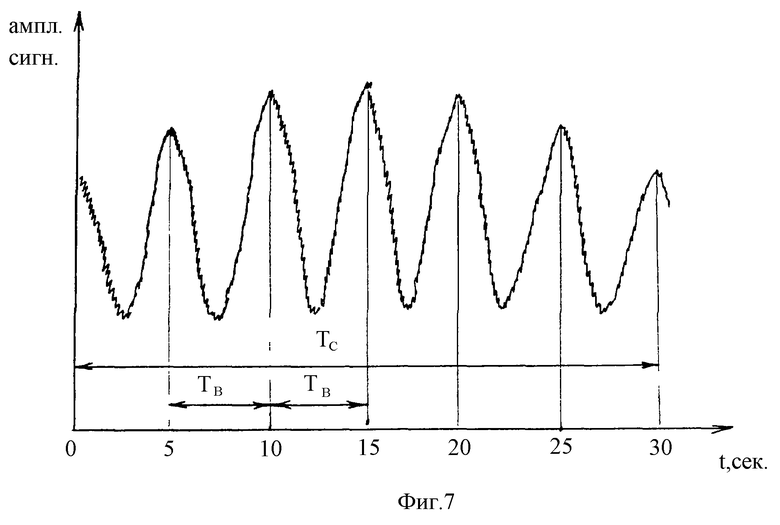
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема, реализующая способ последовательной передачи и приема информации; на фиг. 2 -электрическая схема синтезатора частот, подключенного к блоку переключения; на фиг. 3 - электрические схемы устройств для относительной фазовой манипуляции (а) и деманипуляции (б); на фиг. 4 - электрическая схема распределителя группового сигнала; на фиг. 5 - структурная схема антенно-фидерного устройства; на фиг. 6 - зависимость отношения сигнал/шум на входе приемника от времени движения низкоорбитального КА, где TВ - период вращения КА, ТСИ=ТСС - интервал времени превышения отношения сигнал/шум при измерении и обмене информацией; на фиг. 7 - изменение амплитуды сигнала с характерными замираниями, где ТС - время сеанса связи, TВ - период вращения КА.
Система для передачи и приема информации (фиг. 1) содержит генераторы 1 и 2 тактовых импульсов, генераторы 3 и 4 псевдослучайной последовательности, синтезаторы 5 и б частот, блоки 7 и 8 переключения, передающие и приемные 9 и 10 групповые блоки, распределитель 11 импульсов, формирователь 12 циклового синхросигнала, сумматор 13, устройство 14 цикловой синхронизации, распределитель 15 группового сигнала, группу источников информации 16, группу приемников информации 17, кодер 18 и декодер 19 группового сигнала, устройства относительной фазовой манипуляции 20 и деманипуляции 21 сигнала, радиопередатчик 22, радиоприемник 23, генераторы несущей 24 и опорной 25 частот, дешифратор 26 команд, усилитель 27 мощности, устройство 28 слежения за задержкой псевдослучайной последовательности, дешифратор 29 команд, радиопеленгатор 30, антенно-фидерное устройство 31, блоки дискретного переключения поляризации 54.1...54.n, антенные системы 55.1...55.n, измерители плоскости поляризации 56 и отношения сигнал/шум 57, микропроцессор 58, блок управления поляризацией 59.
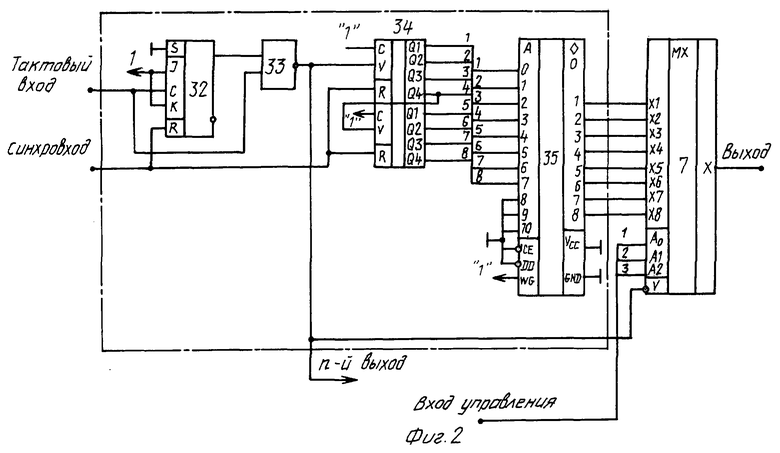
Синтезатор частот (фиг. 2) содержит триггер 32, соединенный выходом через элемент ИЛИ-НЕ 33 с тактовым входом счетчика 34, выходы счетчика 34 подключены к адресным входам постоянного запоминающего устройства (ПЗУ) 35, выходы которого соединены с информационными входами блока 7 переключения.
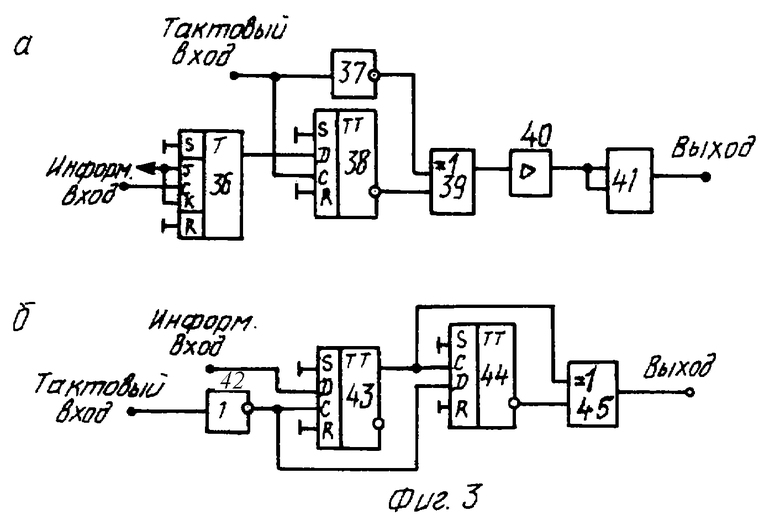
Устройство для относительной фазовой манипуляции (фиг. 3,а) содержит триггер 36, инвертор 37, триггер 38, сумматор 39 по модулю 2, преобразователь 40 уровня сигнала, усилитель 41.
Устройство для относительной фазовой деманипуляции (фиг. 3,б) содержит инвертор 42, триггеры 43, 44, сумматор 45 по модулю 2.
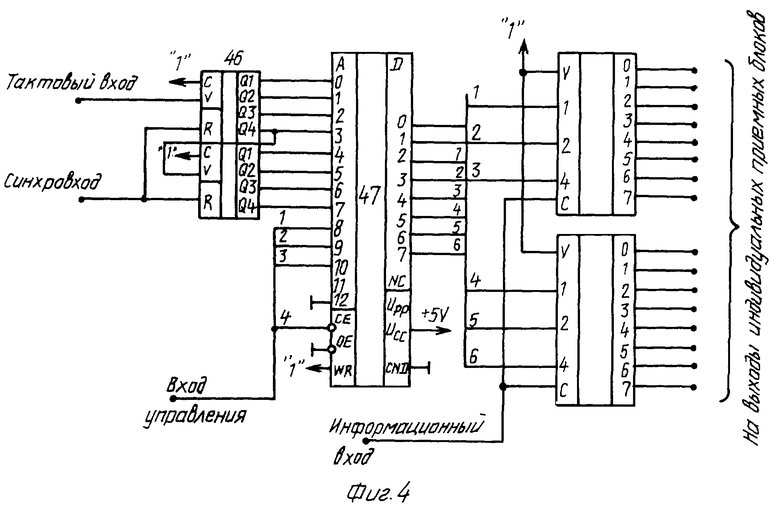
Распределитель группового сигнала (фиг. 4) содержит счетчик 46, ПЗУ 47, демультиплексоры 48 и 49.
Антенно-фидерное устройство (фиг. 5) содержит делитель 50, развязывающий фильтр 51, переключатель 52 и мультиплексор 53, один вывод мультиплексора 53 подключен к входу переключателя 52, а другой вывод соединен с развязывающим фильтром 51. Выход разделительного фильтра 51 через делитель 50 соединен со вторым входом переключателя 52.
Блоки дискретного переключения поляризации 54.1...54.n выполнены на дискретных фазовращателях на p-i-n диодах, обеспечивающих получение фиксированных фазовых сдвигов (Твердотельные устройства СВЧ в технике связи/ Л.Г. Гассанов, А. А. Липатов, В.В. Марков, Н.А. Могильченко. -М.: Радио и связь, 1988.-288с.).
Антенная система 55.1...55.n состоит из N антенн типа "волновой канал" с крестообразно расположенными излучающими элементами. Количество антенн обусловлено их диаграммами направленности (Антенны и устройства СВЧ/Д.И. Воскресенский, Р.А. Грановская, В.Л. Гостюхин и др. Под ред. Д.И. Воскресенского. -М.: Сов. радио, 1972.-320с.).
Измеритель плоскости поляризации 56 реализован на основе компенсационного метода поляризационных измерений. (Методы измерения характеристик антенн СВЧ/Л.Н. Захарьев, А.А. Леманский и др. Под ред. Н.М. Цейтлина. -М.: Радио и связь, 1985.-368с.).
В качестве измерителя отношения сигнал/шум 57 может быть использован микропроцессорный измеритель коэффициента шума Х5-29 (Зайцев А.Н., Иващенко П. А. , Мыльников А.В. Измерения на сверхвысоких частотах и их метрологическое обеспечение.-М.:Издательство стандартов, 1989.-238с.).
В качестве микропроцессора (МП) управления 58 может быть использован микропроцессорный комплект типа К 1800 или KM 1810 (Микропроцессоры и микропроцессорные комплекты интегральных микросхем; В 2т./В.-Б.Б. Айрайтис, Н.Н. Аверьянов и др. Под ред. В.А. Шахнова. -М.:Радио и связь, 1988.-Т.1.368с, т. 2.368с).
Блок управления поляризации 59 представляет собой ЦАП, который преобразует управляющие цифровые сигналы МП в аналоговые для управления блоком 54 (Цифровые радиоприемные системы: Справочник/М.И. Жодзишский, Р.Б. Мазепа и др./Под ред М.И. Жодзишского.-М.:Радио и связь, 1990.-208с).
Основными режимами работы системы для передачи и приема информации являются режим автоматического поиска направления связи и режим дуплексного обмена информацией.
В режиме автоматического поиска направления связи радиопеленгатор 30 последовательно подключает к своему входу сигналы с выхода устройства 31, поступающие на его входы от различных антенных элементов с непересекающимися диаграммами направленности приема. В радиопеленгаторе 30 принятый по каждому из направлений сигнал оценивается по структуре и, если последняя соответствует ожидаемой, то далее производится оценка принятого сигнала по уровню мощности с последующим запоминанием. Наглядно представить структуру сигнала можно при разложении сложного сигнала по более простым функциям или элементарным сигналам (элементам), число которых может быть конечным. Наиболее часто используются частотные элементы, временные (или дискретные) и частотно-временные (или дискретные частотные) элементы. Термин "структура сигнала" достаточно полно изложен в литературе:
1. Варакин Л.Е. Теория систем сигналов. -М.: Сов. радио, 1978. -с.13-18.
2. Тепляков И.М. и др. Радиолинии космических систем передачи информации/ И.М. Тепляков, И.Д. Калашников, Б.В. Рощин. Под ред. И.М. Теплякова. -М.: Сов. Радио, 1975. -с. 10-14.
Таким образом, по окончании цикла анализа уровней сигналов, принимаемых антенными элементами, в радиопеленгаторе 30 выявляется номер антенного элемента, на котором уровень мощности сигнала наибольший. Это значение уровня мощности запоминается в радиопеленгаторе 30, который переключает выход устройства 31 на вход приемного тракта системы.
После подключения выхода устройства 31 на вход приемного тракта системы радиопеленгатор 30 продолжает циклический опрос всех антенных элементов за исключением подключенного к приемнику системы. Для оценки уровня мощности сигнала на основном (подключенном к входу радиоприемника) антенном элементе радиопеленгатор 30 подключает к своему входу сигнал приемного тракта через непропорциональный делитель 50 (фиг.4) и отслеживает относительные изменения этого уровня. По окончании режима автоматического поиска направления связи система переходит в режим дуплексного обмена информацией.
Генераторы 1 и 2 формируют последовательности тактовых импульсов, которые поступают на входы генераторов 3 и 4 и на входы синтезаторов 5 и 6 соответственно, синтезаторы 5 и 6 формируют наборы последовательностей тактовых импульсов, соответствующих набору возможных скоростей передачи группового сигнала, значения которых устанавливаются кодом с выходом дешифратора 26. На выходе блока 7 присутствует частота последовательности тактовых импульсов, соответствующая выбранной скорости передачи, которая поступает на входы распределителя 11 импульсов блока 9. На управляющие входы распределителя тактовых импульсов поступает код, определяющий соотношения скоростей передачи источников информации индивидуальных передающих блоков 16. Таким образом, на передающей стороне имеется возможность задания не только скоростей передачи в каждом из временных каналов, но и возможность варьирования скоростей передачи группового сигнала.
Последовательности цифровых информационных сигналов поступают по соединительным линиям на информационные входы передающих индивидуальных блоков 16, в которых сигналы задерживаются на определенное время и восстанавливается их форма. Сигналы со всех передающих индивидуальных блоков 16 поступают в передающий групповой блок 9, который обеспечивает их временное объединение, распределение по циклам и передачу на выход.
Сформированный информационный групповой сигнал поступает на вход кодера 12 группового сигнала (например, сверточного кода), на выходе которого образуется кодированная последовательность импульсов. Кодированный групповой сигнал подвергается относительной фазовой манипуляции в устройстве 20 и там же суммируется по мод. 2 с поднесущей частотой (это повышает помехоустойчивость цифрового потока и создает наиболее оптимальные условия для приема сигнала).
С выхода устройства 20 групповой сигнал поступает на вход радиопередатчика 22. В радиопередатчике 22 несущая частота, поступающая на генератор 24, сначала модулируется групповым сигналом с выхода устройства 20, а затем модулируется с выхода генератора 3, что обеспечивает равномерное распределение сигнала в спектральной области и снижение плотности потока мощности. Промодулированный сигнал с выхода радиопередатчика 22 усиливается в усилителе 27 и излучается (передается) по каналу связи.
Сигналом, соответствующим началу работы и поступающим с выхода генератора 3, синхронизируется работа синтезатора 5 частоты. За счет этого обеспечивается "привязка" начала импульса тактовой последовательности к началу работы, что позволяет при приеме сигнала синхронизировать работу синтезатора 6 с работой синтезатора 5 с точностью до задержки между синхросигналом с выхода генератора 3 и фронтом импульса выхода синтезатора 5, которая в общем случае определяется задержкой срабатывания элементов и может составлять сравнительно малую величину.
Принятый сигнал двукратно демодулируется в радиоприемнике 23, причем с первого выхода радиоприемника 23 поступает последовательность информационных импульсов, а на втором выходе радиоприемника 23 присутствует сигнал, пропорциональный величине рассогласования по задержке между переданной последовательностью и опорной, поступающей с выхода генератора 4, т.е. пропорциональный величине корреляции двух последовательностей. Ориентируясь по величине корреляции, устройство 28 автоматически устраняет рассогласование между принятой и опорной последовательностями, используя принцип экстремального регулирования и поддерживая величину взаимной корреляции двух последовательностей на максимальном уровне. Началом опорной последовательности, которая однозначно совпадает с началом принятой, синхронизируется работа синтезатора 6, что, как уже отмечалось выше, позволяет синхронизировать тактовые импульсы приемной и передающей сторон.
Поступающий групповой сигнал с выхода радиоприемника 23 подвергается относительной фазовой деманипуляции в устройстве 21 и декодированию в декодере 19 группового сигнала, после чего поступает на вход приемного группового блока 10. Кроме этого, сигнал с выхода радиоприемника 23 поступает на информационный вход дешифратора 29 команд для выделения управляющего кода. Дешифратор 29 на своих выходах формирует двоичный код, который поступает на управляющие входы блока 10 и блока 8. На выходе блока 8 образуется последовательность тактовых импульсов, равная частоте передачи группового сигнала, которая поступает на тактовый вход блока 10.
В блоке 10 устройство 14 устанавливает и поддерживает цикловую синхронизацию. По сигналам синхронизации с выхода устройства 14 распределитель 15 распределяет входной поток цифровой информации по соответствующим каналам.
В распределителе 11 группового сигнала (фиг. 4) происходят процессы, аналогичные работе синтезатора 5 частоты. Перераспределение группового сигнала здесь осуществляется в зависимости от кода управления, т.е. от области памяти используемого ПЗУ.
В многоканальной цифровой системе передачи и приема информации содержатся технические средства, обеспечивающие поддержание тактовой синхронизации при изменении частот задающих генераторов 1 и 2 от температуры или от старения элементов, а также при значительном удалении приемной части системы от передающей, что имеет место, например, при работе через спутник ретранслятор. Априори известный вид последовательности и ее начала, а также синхронизация работы синтезаторов 5 и 6 с началом последовательности обеспечивают однозначное выделение начала импульса тактовой последовательности на приемной стороне, что позволяет синхронизировать работу синтезаторов 5 и 6 с точностью до разницы в задержках срабатывания дискретных элементов.
При движении КА угол поворота плоскости поляризации меняется как за счет флюктуаций электронной плотности ионосферы, так и за счет циклического вращения КА. Это приводит к появлению поляризационных замираний при приеме на антенну с линейной поляризацией (фиг. 7). Быстрые колебания вызваны вращением плоскости поляризации, медленные - вращением КА (Грудинская Г.П. Распространение радиоволн. -М.:Высшая школа, 1975.-280с.).
Медленное вращение вектора поляризации, обусловленное поворотом КА, носит детерминированный характер, то есть в каждый момент времени или дискретно можно согласовывать поляризационную диаграмму направленности приемной антенны с поляризацией полезного сигнала. Управление осуществляется микропроцессором 58 через блок управления поляризацией 59.
Система для передачи и приема информации функционирует следующим образом.
Измеритель отношения сигнал/шум 57 определяет начало и конец, при котором отношение сигнал/шум входного сигнала превышает пороговое значение (фиг. 6). В МП фиксируется и запоминается начало t0 и временной интервал ТСИ превышения отношения сигнал/шум над пороговым. Одновременно с этим измеритель плоскости поляризации 56 определяет угол поляризации входного сигнала при максимальном отношении сигнал/шум. Это значение также запоминается в МП 58.
По результатам измерений МП вырабатывает управляющий цифровой сигнал, который в блоке управления поляризацией 59 преобразуется и подается на управляемые входы блоков дискретного переключения поляризацией 54.1...54.n, где происходит согласование угла поляризации антенной системы 55.1..55.n с определенным ранее углом поляризации входного сигнала. В следующем периоде через интервал ТВ вращения КА осуществляется обмен информации в определенном в предыдущем периоде интервале времени ТСС=ТСИ превышения отношения сигнал/шум над пороговым и в запомненном угле поляризации по команде с МП 58 на управляемый вход передатчика 22. Максимальное число пакетов при приеме-передаче должно быть равно половине отношения времени сеанса связи ТС к числу периодов TВ вращения КА. Для низкоорбитальных КА время сеанса связи определяется зоной гарантированного уровня сигнала и составляет в зависимости от высоты орбит порядка 10-20 мин и при периоде вращения КА порядка 5-10 с (фиг. 7), количество пакетов при приеме-передаче составит порядка 50-100, так как половина периодов вращения КА используется для измерения отношения сигнал/шум, интервала превышения отношения сигнал/шум и угла поляризации входного сигнала.
Нормированный коэффициент передачи энергии между двумя антеннами ηn при линейной поляризации при рассогласовании векторов поляризации приемной и передающей антенн ψ определяется по выражению (Справочник по спутниковой связи и вещанию/Под ред. Л.Я. Кантора.-М.: Радио и связь, 1983.-288с.):
Например, при ψ = 0; ηn = 1(0дБ); при ψ = 90°; ηn = 0,5(-3дБ);
Для случая приемной и передающей антенн с линейной и круговой поляризациями ηn = 0,5.
Предлагаемый способ последовательной передачи и приема информации и система для его осуществления позволяют при организации пакетной радиосвязи обеспечить коллинеарность векторов поляризации обеих антенн и получить выигрыш в отношении сигнал/шум 3 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1992 |
|
RU2047908C1 |
| МНОГОКАНАЛЬНАЯ ЦИФРОВАЯ СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1990 |
|
RU2013012C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2003 |
|
RU2240653C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2305368C2 |
| СПОСОБ РЕФЛЕКСОТЕРАПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2212911C2 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2006 |
|
RU2320084C1 |
| Система дистанционного зондирования трансионосферного распространения радиоволн для метеорной радиосвязи | 2017 |
|
RU2650196C1 |
| РАДИОЛИНИЯ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2004 |
|
RU2273099C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2006 |
|
RU2315428C9 |
| Радиолиния с автоматической регулировкой параметров спектра радиосигнала | 2023 |
|
RU2811564C1 |
Изобретение относится к радиотехнике и может быть использовано для дуплексной передачи информации с временным разделением каналов между низкоорбитальными нестабилизированными космическими аппаратами и земной станцией. Техническим результатом является повышение достоверности принимаемой информации и увеличение отношения сигнал/шум путем адаптивного согласования угла поляризации приемной антенны земной станции с углом поляризации принимаемого сигнала с космического аппарата. Технический результат достигается тем, что в систему, в которой реализуется способ последовательной передачи и приема информации, дополнительно введены блоки дискретного переключения поляризации и управления поляризацией, измерители плоскости поляризации и отношения сигнал/шум, микропроцессор и антенная система, позволяющие в одном периоде вращения низкоорбитального космического аппарата зафиксировать начало и временной интервал для приема-передачи информации, а в следующем периоде осуществляют прием-передачу в запомненном предыдущем интервале времени. 2 с. п. ф-лы, 7 ил.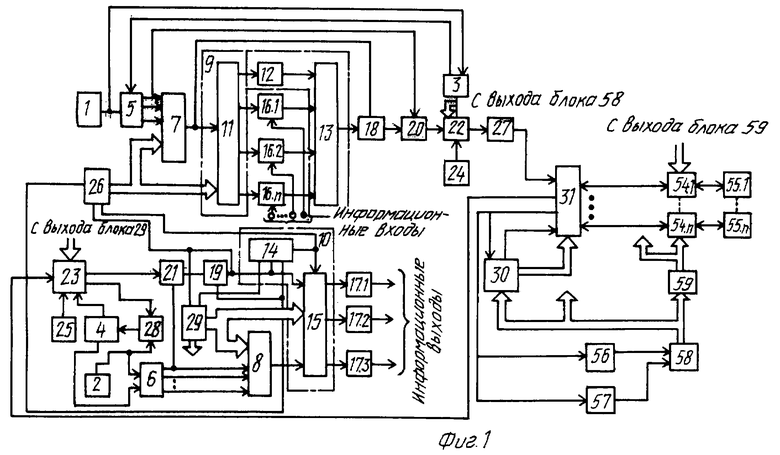
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1992 |
|
RU2047908C1 |
| СИВЕРС А.П | |||
| Основы космической радиоэлектроники | |||
| - М.: Сов.Радио, 1969, с.55,158,160,169 | |||
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ | 1991 |
|
RU2010430C1 |
| АНТЕННАЯ СИСТЕМА ДЛЯ СВЯЗИ С ЛЕТАЮЩИМИ ОБЪЕКТАМИ | 1988 |
|
RU2030822C1 |
| ПЕТРОВИЧ Н.Т., КАМЕНЕВ Е.Ф | |||
| Вопросы космической радиосвязи | |||
| - М.: Сов.Радио, 1965, с.29 | |||
| US 5046128 А, 03.09.1991 | |||
| Устройство для загрузки тестовыми заготовками конвейеров расстойных пруферов и хлебопекарных печей | 1957 |
|
SU115139A1 |
| ПОГРУЖНОЙ ТУРБОНАСОСНЬШ АГРЕГАТ | 0 |
|
SU322525A1 |
