Изобретение относится к измерительной технике и может быть использовано при конструировании устройств для определения взаимного разворота (угла скручивания) разнесенных объектов, для передачи на расстояние направления вектора, например азимутального направления, из плоскости одного уровня в плоскость другого уровня и др.
Пространственная ориентация объектов является весьма актуальной задачей как в области гражданского приборостроения, так и для решения специальных задач. При этом к техническим решениям предъявляются требования не только метрологического характера (высокая точность и др.), но и требования к эксплуатационным характеристикам: их габариты, нерасстраиваемость в течение длительного межрегламентного периода и др.
Известны устройства для контроля взаимного разворота (угла скручивания) разнесенных объектов, использующие методы геометрической оптики. Например, оптический ориентатор (Б. Ю. Ханок, П.Д.Бондаренко, Оптический ориентатор. Вестник БГУ им. В.И. Ленина, cep. I, 1974, 3, с. 38-41), содержащий автоколлимационную систему и тетраэдрический зеркальный отражатель, у которого двугранные углы между отражающими гранями не равны прямому. При отражении коллимированного пучка от такого тройного зеркала образуется шесть отраженных пучков, причем угловые расстояния между смежными отраженными пучками однозначно зависят от величины отступления двугранных углов от прямого и от направляющих косинусов падающего пучка в системе координат, связанной с отражателем. В таком устройстве чрезмерно увеличены габариты входного зрачка объектива автоколлиматора и существенно ограничены как предельные расстояния между объектами, так и предельные измеряемые углы скручивания.
Известно также устройство контроля взаимного разворота объектов (Л.В. Пинаев. Система из двух прямоугольных зеркал и ее свойства. Оптико-механическая промышленность, 1987, 12, с. 18-20), состоящее из двух отражателен в виде прямоугольных зеркал и расположенного между ними предмета, неподвижного относительно одного из отражателей. Принцип работы устройства основан на свойстве прямоугольного зеркала поворачивать отраженное от него изображение предмета. Из этого следует, что угол взаимного разворота ребер прямоугольных отражателей, являющийся признаком взаимного разворота объектов, может быть определен через угол поворота изображения предмета относительно его исходного положения при условии, что сам предмет должен быть строго параллельным ребру связанного с ним отражателя. При невыполнении этого условия угол поворота изображения предмета будет находиться в функциональной зависимости не только от искомого угла взаимного разворота ребер отражателей, но и от угла между предметом и ребром отражателя. Устройства такого типа недостаточно точны и надежны, так как требуют высокой точности выставления предмета (параллельность предмета ребру отражателя) и определения с соответствующей точностью угла непараллельности предмета ребру отражателя.
Наиболее близким по совокупности признаков к предлагаемому изобретению является устройство определения пространственной ориентации объектов, в частности для контроля плоскостности поверхностей (Авт. св. СССР, 741045, МПK G 01 В 11/30, приор. 28.12.77), содержащее два установленных навстречу друг другу прямоугольных призменных отражателя с объективами, две марки с осветителями, симметрично расположенные относительно оси объективов, системы, формирующие симметрично оси объективов изображения марок, расположенные за плоскостью изображения объектива микрообъективы (микроскопы) с приемными призмами и приемное устройство. В этом устройстве взаимный разворот ребер прямоугольных отражателей, установленных на контролируемых поверхностях, из-за неплоскостности контролируемой поверхности приводит к изменению положения индексов, наблюдаемых в микроскоп. При этом точность и достоверность измерений может быть достигнута только при условии параллельности линии марок ребру одного из прямоугольных отражателей. Это устройство характеризуется резко ограниченными эксплуатационными возможностями из-за необходимости проведения постоянных поверок угла между линией марок и ребром отражателя, что является достаточно сложной метрологической задачей, невыполнимой в полевых условиях. С другой стороны, это устройство позволяет проводить работы на фиксированном расчетном расстоянии между призменными отражателями и объективами, что накладывает жесткое ограничение на расстояние между уровнями плоскостей переноса направления.
Техническим эффектом заявляемого устройства является обеспечение высокоточного с высокой степенью надежности определения пространственной ориентации объектов в различных условиях эксплуатации без ограничения на величину дистанции.
Такой эффект достигается тем, что в устройстве пространственной ориентации объектов, содержащем два установленных навстречу друг другу отражателя, один из которых выполнен в виде по крайнем мере одной прямоугольной призмы, размещенный между отражателями объектив, две марки с осветителями, систему, формирующую симметрично оси объектива изображение марок из расположенных за плоскостью изображения объектива микрообъективов с приемными призмами, и приемное устройство, первый по ходу луча отражатель выполнен в виде триппельпризмы, установленной соосно объективу, марки жестко связаны между собой, установлены в предметной плоскости объектива и обращены в сторону триппельпризмы, при этом блок марок, образованный марками с осветителями, микрообъективами и приемными призмами, установлен с возможностью вращения вокруг оси объектива.
Выполнение призменного отражателя в виде блока призм позволяет вести измерения при существенных взаимных продольных и поперечных смещениях объектов, не меняя принципиальной сущности физических явлений.
Если приемное устройство выполнить в виде фотоэлектрического прибора с зарядовой связью (ФПЗС), фоточувствительный регистр которого совмещен с плоскостью изображения микрообъективов, обеспечивающих позиционирование световых импульсов на регистре, дополнительно снабдить его электронным блоком обработки сигналов, а между блоком марок и приемным устройством разместить призменный блок сведения, то оба световых индекса окажутся на фоточувствительном регистре ФПЗС, что позволит проводить непрерывные измерения углового рассогласования между ребром призменного отражателя 1 и линией марок. Это обеспечивает автоматизацию измерений и повышение точности (см. п.2 Формулы).
Если устройство дополнительно снабдить жестко связанным с блоком марок элементом привязки, выполненным в виде отражателя, определяющим контролируемое направление, то линия марок будет материализована, что позволяет передать направление вектора, заданного ребром призменного отражателя 1, в другую плоскость, на контролируемый объект (см. п.3 Формулы).
При размещении по ходу луча между призменным отражателем и объективом второй триппельпризмы, установленной с возможностью движения в плоскости, перпендикулярной оптической оси системы, появляется возможность осуществить калибровку устройства в полевых условиях, не используя при этом никакого стендового н метрологического обеспечения (см. п.4 Формулы).
Введение в ход лучей поверочной триппельпризмы производится только в процессе калибровки устройства. Введение может быть выполнено различными конструкторскими решениями, которые здесь не рассматриваются.
Благодаря новому схемному и конструкторскому решениям удалось связать угловое положение линии марок с ребром отражателя, задающим контролируемое направление, исключив при этом влияние углового положения линии марок относительно второго отражателя, и за счет установки марок в предметной плоскости объектива изменять расстояние между линией марок и объективом.
На чертеже представлена принципиальная схема предложенного устройства (пример конкретного исполнения по п.4 Формулы), где прямоугольный призменный отражатель 1, отражатель 2 в виде триппельпризмы, объектив 3, излучатели 4, 5 с коллиматорами, марки 6, 7 со светоделителями, приемные призмы 8, 9, микрообъективы 10, 11, приемное устройство 12, призменный блок 13 сведения, блок 14 обработки сигналов, элемент 15 привязки в виде прямоугольного зеркала и поверочная триппельпризма 16.
I - задающий блок.
II - приемный блок.
Пунктирной линией обозначено второе положение призменного отражателя 1, когда базовое направление задается перпендикуляром к направлению линии ребер.
Устройство включает два отдельных блока: блок I содержит только прямоугольный призменный отражатель 1, который располагается на одном из двух контролируемых объектов, либо в случае передачи направления вектора - в плоскости базового направления. Пространственное положение ребра (ребер) прямоугольного призменного отражателя задает базовое направление, поэтому блок I назовем задающим. Блок II включает все остальные элементы устройства, его размещают на другом контролируемом объекте либо в плоскости переноса базового направления в случае передачи вектора направления, его назовем приемным блоком.
Устройство работает следующим образом. На одном из объектов устанавливают задающий блок I, блок II устанавливают на контролируемом объекте либо в плоскости переноса вектора направления. Световые пучки от излучателей 4, 5 проходят соответственно через марки 6, 7 и светоделители, отражаются от триппельпризмы 2, проходят через объектив 3, отражаются от пряугольного призменного отражателя 1, вновь проходят через объектив 3, триппельпризму 2 и светоделители 6, 7, которые строят изображения марок в плоскости, являющейся предметной для выходных микрообъективов 10, 11. Эти изображения переносятся микрообъективами на фотоприемное устройство 12.
Подходы к решению таких фотоприемных устройств известны.
Как известно, триппельпризма обладает свойством отражать лучи в направлении, противоположном направлению падающих на нее лучей, при этом разворот ее в любом направлении не вызывает изменения направления отраженных лучей. Благодаря этому свойству в рассмотренном выше ходе оптических лучей только прямоугольный призменный отражатель 1 изменяет их направление в том случае, если линия марок не совпадает с "нулевым положением". За "нулевое положение" линии марок может быть принято одно из двух ее положений: а) линия марок строго перпендикулярна ребру прямоугольного призменного отражателя (на фиг.1 отражатель в этом случае представлен пунктирной линией), и б) линия марок строго параллельна ребру прямоугольного призменного отражателя.
Настройка объектива 3 обеспечивает на выходе последнего образование двух сходящихся пучков лучей, при этом объектив и прямоугольный призменный отражатель образуют двухлучевую автоколлимационную систему, которая дает возможность работать на различных расстояниях между блоками I и II, т.е. на различных расстояниях между контролируемыми объектами. При этом не происходит ни расфокусировки изображении марок, ни изменения масштаба преобразовании. Марки 6, 7 жестко связаны между собой и образуют вместе с осветителями 4, 5, приемными призмами 8, 9, микрообъективами 10, 11 блок, который выполняют с возможностью разворота вокруг оси объектива 3 с целью ориентации линии марок в заданном направлении, соответствующем направлению ребер призменного отражателя 1. Технологически удобно разворачивать весь блок II вокруг оси объектива 3.
Таким образом, выполнение первого по ходу луча отражателя в виде триппельпризмы позволяет установить однозначную зависимость измеряемой величины - расстояние между индексами - только от угла между линией марок и направлением ребер прямоугольного отражателя; настройка объектива обеспечивает возможность изменения расстояния между контролируемыми объектами; установка блока марок с возможностью вращения вокруг оптической оси объектива позволяет располагать линию марок в заданном направлении. Выполнение призменного отражателя в виде блока призм позволяет вести измерения при взаимных продольных и поперечных смещениях измеряемых объектов, не меняя сущности физических явлений.
Пример конкретного исполнения (по п.4 Формулы изобретения, см. фиг.1). На нашем предприятии была создана, аттестована и передана Заказчику установка для переноса вектора направления из плоскости отражателя блока I в плоскость элемента привязки блока 2 и далее на контролируемый объект.
Блок I был выполнен из 18 призменных отражателей типа БР - 180, фокус объектива 3 составил 1800 мм, расстояние между марками составляло 44 мм, микрообъективы 10, 11 выполнены с увеличением - 1, расстояние между объектами варьировалось в диапазоне 3 ± 0,5 м.
Базовое направление задавалось перпендикуляром к линиям ребер прямоугольного призменного отражателя 1.
Для обеспечения автоматизации измерений выходной информации, т.е. расстояния между индексами на выходе, прибор снабжен фотоэлектрическим приемным устройством с зарядовой связью (ФППЗ) и призменным блоком сведения 13, жестко связанным с ФПУ и обеспечивающим приведение обоих индексов на фоточувствительный регистр. Фоточувствительный регистр прибора содержит 2048 элементов шириной 13 мкм каждый (шаг ФПЗС) и высотой 40 мкм и размещается в плоскости изображений микрообъективов 10, 11. ФПУ совместно с электронным блоком обработки сигналов преобразует пространственное положение световых индексов на фоточувствительном регистре ФППЗ во временную развертку видеосигналов, при этом измеряется временной интервал между видеосигналами, что адекватно расстоянию между индексами.
Приемы точного позиционирования световых индексов на регистре ФППЗ с помощью электронной обработки видеосигналов известны и здесь не рассматриваются.
Для передачи направления вектора на расстояние материализовали линию марок, относительно которой определяется искомый угол рассогласования. Для этой цели использовали жестко установленный на блоке марок элемент привязки, задающий контролируемое направление в плоскости переноса направления вектора. Элемент привязки был выполнен в виде прямоугольного зеркала, ребро которого установлено параллельно линии марок. Установка элемента привязки на блок марок возможна с некоторым углом между линией марок и элементом привязки, обусловленным технологическими допусками. Этот угол измеряется при изготовлении оптической системы, паспортизуется и является поправкой при измерениях для каждой конкретной оптической системы. В нашем случае он составлял 32".
В процессе измерении удобно пользоваться показанием электронного блока N = Kм × α, где Км - коэффициент масштабного преобразования линейной дискреты ФПУ в угловую дискрету; α- угол взаимного разворота блоков I и II.
Калибровка устройства может осуществляться любыми способами. Для калибровки устройства использовали дополнительную триппельпризму, установленную с возможностью ввода-вывода из оптического тракта. Размер триппельпризмы был выбран из условия захвата двух пучков, выходящих из объектива. Если триппельпризму ввести в ход лучей за объективом вместо призменного отражателя 1, то она благодаря своим свойствам отразит падающие лучи в том же направлении, при этом световые индексы на входе ФПУ займут положение, адекватное нулевому углу рассогласования между ребром прямоугольного отражателя и линией марок.
Показание No электронного блока обработки сигналов, соответствующее этому положению, фиксируют и заносят в долговременную память блока обработки информации. Оно может быть проверено (обновлено) с любой требуемой периодичностью.
Перенос направления вектора на расстояние осуществляли разворотом или блока марок, или блока II вокруг оси объектива до тех пор, пока показания электронного блока не станут равными Nт=No+Na, где Na - поправка на угол α между линией марок и элементом привязки.
При аттестации устройства предельная ошибка определения угла взаимного разворота объектов составила 5'' для предельных углов разворота 1,5o, предельная ошибка переноса азимутального направления при использовании устройства в качестве вертикального канала передачи азимута составила 7''.
Предложенное устройство позволяет обеспечить высокую точность и высокую степень надежности пространственной ориентации объектов при любом расстоянии между ними. Предложенное устройство многофункционально, оно с одинаковым успехом решает задачи взаимной ориентации объектов, переноса направления вектора из одной плоскости в другую, определение параллельность плоскостей и т.д.
На нашем предприятии проведена конструкторская проработка и изготовлен первый опытный образец устройства пространственной ориентации объектов. Устройство паспортизовано и после успешных испытаний передано заказчику. В настоящее время разрабатывается техническая документация для серийного выпуска устройств по предложенному изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА СТЕКЛЯННОГО КЛИНА | 2002 |
|
RU2206870C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА | 1999 |
|
RU2155321C1 |
| ЗЕРКАЛЬНО-ЛИНЗОВЫЙ ОБЪЕКТИВ (ВАРИАНТЫ) | 2002 |
|
RU2212695C1 |
| ЛАЗЕРНЫЙ НИВЕЛИР | 2000 |
|
RU2181476C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252395C1 |
| ПРОЕКЦИОННЫЙ ОБЪЕКТИВ ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2002 |
|
RU2215313C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
Изобретение относится к измерительной технике и может быть использовано при конструировании устройств для определения взаимного разворота (угла скручивания) разнесенных объектов, для передачи на расстояние направления вектора, например азимутального направления, из плоскости одного уровня в плоскость другого уровня и др. Устройство пространственной ориентации объектов включает два установленных навстречу друг другу отражателя, один из которых выполнен в виде по крайней мере одной прямоугольной призмы, размещенный между отражателями объектив, две марки с осветителями, систему, формирующую симметрично оси объектива изображения марок из расположенных за плоскостью изображения объектива микрообъективов с приемными призмами, и приемное устройство. Новым в устройстве является то, что первый по ходу луча отражатель выполнен в виде триппельпризмы, установленной соосно объективу, марки жестко связаны между собой, установлены в предметной плоскости объектива и обращены в сторону триппельпризмы, при этом блок марок, образованный марками с осветителями, микрообъективами и приемными призмами, установлен с возможностью вращения вокруг оптической оси объектива. Техническим эффектом заявляемого устройства является обеспечение высокоточного с высокой степенью надежности определения пространственной ориентации объектов в различных условиях эксплуатации без ограничения на величину дистанции. 3 з.п.ф-лы, 1 ил.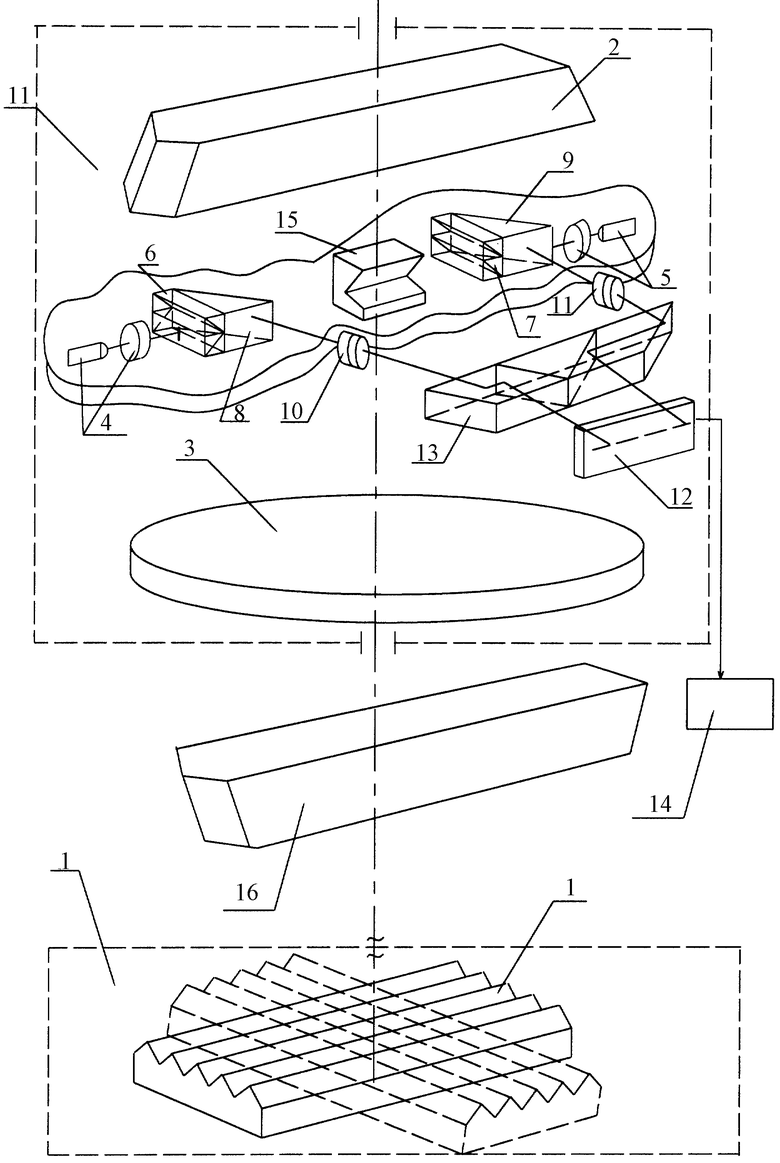
| Устройство для контроля плоскостности поверхностей | 1977 |
|
SU741045A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 1996 |
|
RU2086917C1 |
| Жатка | 1977 |
|
SU631107A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| ОТРАЖАТЕЛЬ ФОТОЭЛЕКТРИЧЕСКОГО АВТОКОЛЛИМАЦИОННОГО УГЛОМЕРА | 1991 |
|
RU2054621C1 |

