Изобретение относится к измерительной технике и может быть использовано в астрономии, навигации, геодезии, технической физике, точном машиностроении и приборостроении, оптико-механической промышленности, оптико-электронной промышленности, в строительстве сооружений, прежде всего для первичной аттестации и изготовления эталонных угловых мер для определения инструментальной погрешности образцовых углоизмерительных средств, для поверки испытательных угловых полигонов, углоизмерительных приборов, стендов, датчиков угла, для контроля технологических процессов по точности изготовления геодезических лимбов, угловых оптических элементов, растровых решеток, кодовых дисков, оптических дисков памяти, в разработке и создании нового класса высокоточных углоизмерительных приборов и оборудования.
Известен способ контроля угла поворота по авт. св. СССР 1767325, кл. G 01 B 11/26, заключающийся в том, что вращают поворотное устройство с установленными на нем кольцевым лазером и многогранной призмой по часовой стрелке, регистрируют за один полный оборот количество импульсов фотоэлектрического автоколлиматора при совмещении нормали к грани призмы с визирной осью автоколлиматора, производят подсчет количества периодов сигнала кольцевого лазера за период времени между двумя зарегистрированными импульсами автоколлиматора, вращают поворотное устройство в противоположную сторону, повторно регистрируют за один полный оборот количество импульсов автоколлиматора и повторно производят подсчет количества периодов сигнала кольцевого лазера, вычисляют разность количества импульсов автоколлиматора и производят сравнение этой разности с количеством граней призмы, одновременно с вычислением разности количества импульсов автоколлиматора вычисляют разность количества периода кольцевого лазера за полный оборот, полученных при вращении в обе стороны, производят сравнение вычисленной разности с количеством периодов сигнала кольцевого лазера, по результату сравнения судят о работе измерительной системы.
Недостаток способа заключается в том, что разность количества периодов сигнала кольцевого лазера не является однозначной функцией значения угла между гранями призмы из-за нестабильности расщепленной частоты кольцевого лазера, зависящей от многих факторов, в том числе от угловой скорости вращения поворотного устройства, ограничивающей чувствительность кольцевого лазера малыми угловыми скоростями.
Известен способ определения осредненной погрешности прозрачного лимба углоизмерительного прибора (авт. св. СССР 1659702, кл. G 01 C 1/06), заключающийся в том, что последовательно измеряют частные погрешности каждого из штрихов в группе штрихов считывающей маски по границам свет-тень и тень-свет и используют данные дополнительных определений при обработке результатов измерений.
Способ вносит дополнительные погрешности в инструментальную погрешность прибора при определении частных погрешностей по границам свет-тень и тень-свет, кроме того, он малопроизводителен и нетехнологичен, так как требует полунатурного макетирования или механического вмешательства внутрь углоизмерительного прибора при определении осредненной погрешности.
Известно устройство (авт. св. СССР 1384951, кл. G 01 C 1/02), реализующее способ, заключающийся в том, что непрерывно вращают закрепленные на одной оси эталонный и контролируемый лимбы и одновременно измеряют (заполняют импульсами стабильной частоты) интервалы времени между импульсами, фиксирующими угловое положение штрихов эталонного лимба, и между импульсами, фиксирующими угловое положение штрихов контролируемого лимба, и обрабатывают погрешности контролируемого для каждого интервала по формуле
где ϕi - угол между штрихами контролируемого лимба;
ϕo - угол между штрихами эталонного лимба;
Ti - количество импульсов стабильной частоты, уложившихся в интервале времени между штрихами контролируемого лимба;
To - количество периодов стабильной частоты, уложившихся в интервале времени между штрихами эталонного лимба.
Способ, реализованный в устройстве, вносит в измерения дополнительные погрешности, обусловленные неточностью образцового лимба и неточностью в установке угловой меры эталонного лимба при согласовании с угловой мерой контролируемого лимба, когда отношение количества штрихов шкалы эталонного лимба к количеству штрихов шкалы контролируемого лимба не целое кратное.
Известен способ определения погрешности диаметров лимбов углоизмерительных инструментов (авт. св. СССР 556314, кл. G 01 C 1/00), заключающийся в том, что сравнивают моменты времени прохождения через визирную ось соответствующих штрихов эталонного и исследуемого лимбов, закрепленных на одной вращающейся оси.
Способ вносит в измерения дополнительные угловые погрешности, обусловленные неточностью эталонного лимба, нестабильностью частоты вращения оси, кроме того, способ не позволяет производить контроль лимбов с любым законом расположения штрихов по длительной окружности, отличающимся от эталонного лимба.
Известны способ измерения угловых величин и устройство для его осуществления (авт. св. СССР 1795271, кл. G 01 B 11/26), заключающийся в том, что образуют первую и вторую интерференционные картины от одного лазера (когерентного источника пространственного излучения) с углом сходимости волновых фронтов, противоположным по знаку первой картине, а величину перемещения измеряют по изменению положения одной интерференционной картины относительно другой.
В реализации способа использованы лазер, скрепленный с объектом, зеркальный блок и система анализа.
К недостаткам способа можно отнести малый диапазон измеряемых угловых величин до 3,5 угловых минут, влияние среды распространения на точность измерений при разнесенных в пространстве когерентных каналов излучения.
Известно устройство для контроля дорожек лимбов угломерных приборов [1], реализующее способ, заключающийся в том, что непрерывно вращают закрепленные на одном валу эталонный и контролируемый лимбы, преобразуют сигналы считывания с эталонного и контролируемого лимбов в импульсные последовательности, умножают частоту импульсов эталонной последовательности (методом импульснофазовой автоподстройки частоты), стробируют во времени положение границ штрихов контролируемого лимба относительно границ штрихов эталонного лимба, заполняют по границам штрихов интервалы времени умноженной частотой импульсов эталонной последовательности, подсчитывают количества импульсов заполнения между границами штрихов, данные заносят в вычислительный анализатор, запоминают и определяют положения границ штрихов контролируемого лимба.
Способ, реализованный в устройстве, вносит в угловые измерения дополнительные погрешности эталонного лимба и умножителя.
Известна измерительная машина "ЕКТМ-М" (Герд Шухард, Новый приборный комплекс для изготовления высокоточных круговых шкал, журнал Йенское обозрение N2, стр. 92-94, 102, CARL ZEISS IENA, ГДР, ЙЕНА, 1986 г.), реализующая способ угловых измерений, заключающийся в том, что вращают с постоянной угловой скоростью ротор, выполненный в виде высокоточной воздушной опоры с радиальным биением не более 0,03 мкм, на котором закреплены первичный круг и измеряемый объект, преобразуют информацию с первичного круга и измеряемого объекта в импульсные последовательности, измеряют интервалы времени между штрихами объекта и штрихами первичного круга, рассчитывают исходя из номера первичного круга, соответствующей поправки и измеренных интервалов времени углового положения штрихов измеряемого объекта, выводят данные после коррекции эксцентриситета по выбору, а именно для радиальных или диаметральных линий в виде отношения к первому штриху, или приведенные к среднему арифметическому суммарной погрешности деления, или в виде ошибки интервала.
К недостаткам способа, реализованного в измерительной машине, можно отнести наличие дополнительной погрешности, обусловленной нестабильностью угловой скорости вращения ротора и ошибки от вводимой поправки (коррекции) по угловому положению штрихов первичного круга.
Известен способ аттестации шкалы углоизмерительного прибора, основанный на методе контроля по Хейвелинку, Парняков Е.С., Методы и средства автоматизированного контроля круговых мер, аналитический обзор за 1970 - 1988 г., - ЦНИИИТЭ, 1989, заключающийся в том, что многократно сравнивают значения углов, отсчитанных на углоизмерительном приборе с углами контрольного датчика, причем после каждого круга сличения в пределах 360o контрольный датчик угла поворачивают на один угловой интервал шкалы относительно углоизмерительного прибора, заканчивают сравнение углов при развороте контрольного датчика угла 360o относительно аттестуемого углоизмерительного прибора.
Способ позволяет исключить неравномерность значений погрешностей в зависимости от числа шагов разворота и несколько снизить само значение ошибки. К недостаткам способа можно отнести низкую производительность из-за большого объема ручного труда при аттестации, соответственно значительный вес субъективной оценки.
Наиболее близким заявляемому способу и устройству измерения углов является способ измерения погрешности положения штрихов круговых шкал и устройство для его осуществления [2], заключающиеся в том, что непрерывно вращают поверяемую шкалу, регистрируют моменты прохождения штрихами шкалы зоны считывания и сравнивают полученный сигнал с усредненным по времени сигналом, выделяют их разностную частоту и интегрируют ее по времени.
Способ вносит в измерения дополнительные систематические и случайные погрешности, обусловленные фазовым детектированием при выделении разностной частоты и ее интегрировании.
Устройство по способу содержит двигатель вращения шпинделя с оправкой для крепления круговой шкалы, отсчетный блок, оптически связанный с круговой шкалой, опорно-измерительный блок фазового детектирования, блок обработки, регистратор, датчик начального положения, кинематически связанный со шпинделем, блок управления и блок радиального перемещения, механически связанный с отсчетным блоком.
Устройство, реализующее способ, вносит в измерения дополнительную погрешность, обусловленную дестабилизирующими факторами двигателя на частоту поверяемой шкалы.
Метрологическая аттестация и поверка средств измерения углов является одной из задач технической физики, от решения которой зависит уровень технологии многих отраслей промышленности, тесно связанный с экономикой производств и качеством продукции.
Ясно, что в первую очередь требуются новые, недорогие, простые в реализации, высокоточные, технологичные, легко автоматизируемые, высокопроизводительные, объективные методы и средства метрологической аттестации и поверки эталонных и образцовых угловых мер при их изготовлении, хранении и тиражировании, а также при создании на их базе технических средств и углоизмерительного технологического оборудования, с помощью которого изготавливают, измеряют и контролируют в производстве, в том числе, детали, элементы угловых топологических структур, узлы и изделия, выполняющие функции углоизмерительных первичных рабочих инструментальных средств, как то: призмы, шкалы, лимбы, растры, дифракционные решетки, кодированные диски, оптические диски памяти, датчики, приборы и устройства различного назначения.
Повышение точности измерения углов объекта контроля и повышение точности формирования угловых меток на объекте в заявляемом способе достигается тем, что непрерывно измеряют интервалы времени между моментами прохождения меток объекта контроля в течение заданных целых оборотов непрерывно относительного вращения между объектом контроля и позициями считывания-записи его меток, запоминают их и определяют по ним углы между метками объекта контроля по формуле
ϕ = F(t-to),
где
ϕ - угол относительного поворота между объектом контроля и позициями считывания - записи его меток;
F - функция приближения т.е. интерполяции;
t - аргумент функции, т.е. текущее время;
to - начальный аргумент, т.е. начало отсчета.
При определении углов между метками объекта контроля отклонения функции приближения от угла относительного поворота объекта контроля и позиций считывания-записи его меток сравнивают с их допустимыми значениями, корректируют заданное количество целых оборотов относительного вращения в зависимости от результата сравнения, повторяют действия по измерению интервалов времени между метками объекта контроля, описанные ранее, до обеспечения условия, при котором отклонения функции приближения от угла относительного поворота между объектом контроля и позициями считывания-записи его меток не превышают допустимого значения отклонения;
При измерении углов между метками непрерывно вращающегося объекта контроля, закрепленного на валу и сцентрированного по отношению к оси вращения вала, имеющего малые момент трения, торцевые и радиальные биения дополнительно определяют влияние эксцентриситета и корректируют углы между метками на величину влияния эксцентриситета;
При измерении углов между метками непрерывно вращающегося объекта контроля, закрепленного на валу и сцентрированного по отношению к оси вращения вала, имеющего момент инерции, значительно больший момента инерции объекта контроля и малые момент трения, торцевые и радиальные биения, углы между метками объекта определяют в соответствии с измеренными интервалами времени между моментами прохождения позиций считывания-записи одинаковых других объектов по ранее установленной функции приближения для одинакового по своим физическим свойствам и параметрам объекта ранее описанными действиями с сохранением иных условий, обеспечивающих выполнение ранее описанных действий, при этом за начальный аргумент принимают начало периода вращения, равного или близкого по величине первому периоду вращения относительно позиций считывания одинакового проконтролированного объекта по ранее установленной функции приближения на выбеге.
При измерениях в плоскости анализа углов между метками объекта контроля, при прохождении которых ориентированными на объект позициями считывания-записи, закрепленными на валу так, что их визирные линии находятся в одной плоскости анализа с осью вращения вала, имеющего совместно с позициями считывания-записи большой момент инерции и малые момент трения, торцевые и радиальные биения, углы между метками объекта определяют в соответствии с измеренными интервалами времени между моментами прохождения позициями считывания-записи меток объекта контроля по ранее установленной функции приближения действиями, описанными ранее, с сохранением иных условий, обеспечивающих выполнение действий, описанных ранее.
Угловые метки на объекте, непрерывно вращающемся относительно ориентированной позиции считывания-записи, закрепленном на валу и сцентрированном по оси вращения вала, имеющего малые момент трения, торцевые и радиальные биения, формируют синхронно с сигналами записи меток заданной топологической структуры в соответствии с ранее установленной функцией приближения в моменты времени прохождения объектом позиций считывания-записи, при этом на начальный аргумент функции формирования угловых меток во времени принимают начало периода относительного вращения этого объекта с ранее установленной функцией приближения.
Кроме того, угловые метки на объекте, непрерывно вращающемся относительно ориентированной на него позиции считывания-записи, закрепленном на валу и сцентрированном по оси вращения вала, имеющего малые трения, торцевые и радиальные биения, формируют синхронно с сигналами считывания меток с другого, закрепленного на том же валу и сцентрированного по оси вращения вала, объекта, на котором угловые метки сформированы по заданной топологической структуре действиями в соответствии с ранее установленной функцией приближения.
На фиг. 1 и 2 изображены устройство и его вариант исполнения по заявляемому способу соответственно.
Устройство содержит вал 1 вращения, имеющий метки считывания целого оборота вала и его долей, выполненный, например, в виде высокоточной опоры с газовой смазкой (вращающаяся часть опоры показана в разрезе), на котором сцентрированы и закреплены объект 2 контроля, выполненный, например, в виде стеклянного лимба или кольцевого лазера (на фиг. 1 условно показан стеклянный лимб, который может быть представлен как единое целое с конструкцией вала 1 или как объект 2 контроля),
объект 3 контроля, выполненный, например, в виде цилиндра или диска, ось симметрии которого совмещают с осью вращения вала 1, или призмы, боковую грань которой ориентируют параллельно оси вращения вала 1;
позицию 4 считывания-записи, выполненную, например, в виде фотоэлектрического автоколлиматора, визирную ось которого совмещают с нормалью к боковой грани призмы, причем в момент их совмещения вырабатывают сигнал считывания, или приемопередающего устройства, ориентированного относительно объекта 3 к его цилиндрической поверхности или к плоскости основания, перпендикулярной к оси вращения вала 1;
позиции 5 и 6 считывания-записи, выполненные в виде приемопередающих преобразователей меток целого оборота вала 1 и его долей соответственно, например, в виде фотоэлектрических или оптико-электронных, или магнитоэлектрических, или магнитооптических, причем позицию 5 используют преимущественно для выполнения операции считывания (приема);
узел 7 выбора объекта контроля, первый вход которого соединен с выходом позиции 4, а второй вход соединен с выходом позиции 6 считывания меток объекта контроля 2;
блок 8 управления, первый вход которого соединен с выходом позиции 5 считывания метки целого оборота вала 1, второй вход - с выходом узла 7, а первые два выхода соединены со входами записи позиций 4 и 6 соответственно и второй выход соединен с третьим входом узла 7;
вычислительный анализатор 9, выполненный в виде, например, электронно-вычислительной машины, у которого первые входы соединены с третьими выходами блока 8 и первые выходы соединены с третьими входами блока 8;
генератор 10 высокостабильной частоты импульсов, выход которого соединен с четвертым входом блока 8;
формирователь 11 фронта и среза (переднего и заднего фронтов) сигнала считывания меток объекта контроля, выполненный в виде фиксатора временного положения фронтов, например, по точкам перегиба, у которого первый вход соединен с выходом узла 7, второй вход соединен с четвертым выходом блока 8, а третий вход соединен с выходом генератора 10;
счетчик 12 импульсов, первый вход которого соединен с выходом генератора 10, а второй вход - с четвертым выходом блока 8;
регистры 13, 14, первые входы которых подсоединены к выходам счетчика 12, вторые входы подсоединены соответственно к первому и второму выходам формирователя 11, третьи входы подсоединены ко вторым двум выходам анализатора 9, а выходы подсоединены ко вторым входам анализатора 9;
триггеры 15, 16, у которых первые входы подсоединены соответственно к первому и второму выходам формирователя 11, вторые входы подсоединены к четвертому выходу блока 8, третьи входы подсоединены ко вторым двум выходам анализатора 9, а выходы подсоединены к третьим входам анализатора 9.
Устройство измерения углов по предлагаемому способу работает следующим образом.
На вал 1 вращения устанавливают, центрируют и закрепляют объекты 2, 3, ориентируют позиции 4, 5, 6 считывания-записи относительно меток объектов 2, 3. Раскручивают вал 1 (фиг. 1 привод раскручивания вала 1 не показан), оставляют вал 1 в режиме свободного выбега.
По первым выходам анализатора 9 на третьи входы блока 8 последовательно во времени задают установку 1 (количество целых оборотов вращения во времени задают установку 1 (количество целых оборотов вращения вала 1 соответственно объекта контроля по выбору либо объекта 2, либо объекта 3), сигнал ПУСК, которые в блоке 8 дешифрируют и запоминают. На четвертом выходе блока 8 вырабатывают сигнал, которым воздействуют на второй вход формирователя 11 и запрещают прохождение на его выходы сигналов считывания меток объекта контроля, действующих на первом входе формирователя 11. Кроме того, сигналом на четвертом выходе блока 8 воздействуют на второй вход счетчика 12, на вторые входы триггеров 15 и 16, устанавливают триггеры 15, 16 и счетчик 12 в исходное состояние, запрещают счет импульсов, поступающих с выхода генератора 10 на вход счетчика 12.
Сигналом на втором выходе блока 8 воздействуют на третий вход узла 7 и производят выбор объекта контроля. Для определенности, например, выбирают объект 3.
При вращении объектов 2, 3 на выходах позиций 4, 5, 6 вырабатывают сигналы в виде импульсных последовательностей считывания меток объектов контроля, которые подают на первый вход узла 7, на первый вход блока 8 и на второй вход узла 7 соответственно.
С момента времени прихода с выхода позиции 5 импульса считывания метки целого оборота вала 1 на первый вход блока 8, при наличии занесенного в его память сигнала ПУСК, в блоке 8 выполняют подготовку к формированию начала цикла измерения.
С момента времени прихода импульса считывания метки объекта 3, следующего за импульсом метки целого оборота вала 1, импульсом с выхода узла 7 воздействуют на второй вход блока 8, на четвертом выходе которого вырабатывают сигнал, которым снимают запрет счета импульсов с выхода генератора 10, поступающих на первый вход счетчика 12, по второму входу формирователя 11 разрешают прохождение через него сформированных по фронту и срезу импульсов считывания меток объекта 3 с его первого и второго выходов на первые входы триггеров 15 и 16 соответственно.
Причем импульсы на первом и втором выходах формирователя 11 во времени вырабатывают по фронтам импульсов генератора 10, селектируя по третьему входу формирователя 11 фронтом и срезом импульсов считывания меток объекта 3 ближайший фронт импульса генератора 10, сдвигают их по времени, например, на половину периода частоты следования импульсов генератора 10 относительно счетного импульса, поступающего с выхода генератора 10 на вход счетчика 12.
Таким образом, формируют начало цикла измерения, привязанное к первому импульсу считывания метки объекта 3, пришедшему после импульса считывания метки целого оборота вала 1, которые подсчитывают в блоке 8 и сравнивают с заданной уставкой 1 из анализатора 9.
Первым импульсом на первом выходе формирователя 11, сформированным по его первому входу из фронта импульса считывания метки объекта 3, воздействуют на первый вход триггера 15 и на второй вход регистра 13, при этом производят запись с выхода счетчика 12 в регистр 13 по его первым входам информации о количестве импульсов генератора 10, поступивших в счетчик 12, и устанавливают выход триггера 15 в единичное состояние. Сигналом с выхода триггера 15 по одному из третьих входов анализатора 9 сообщают о готовности информации в регистре 13 для ее считывания в анализатор 9. В анализаторе 9 опрашивают сигнал с выхода триггера 15 и по его единичному состоянию выхода на одном из вторых выходов анализатора 9 вырабатывают сигнал, которым воздействуют на третий вход регистра 13, считывают информацию с выходов регистра 13 в анализатор 9 по его вторым входам и запоминают, а по третьему входу триггера 15 устанавливают его выход в нулевое состояние.
Таким образом, в анализатор 9 с регистра 13 заносят начальную информацию цикла измерения и запоминают.
Вторым импульсом на втором выходе формирователя 11, сформированным по его первому входу из среза импульса считывания метки объекта 3, воздействуют на первый вход триггера 16 и на второй вход регистра 14, при этом производят запись с выходов счетчика 12 в регистр 14 по первым его входам информации о количестве импульсов генератора 10, поступивших в счетчик 12, и устанавливают выход триггера 16 в единичное состояние. Сигналом с выхода триггера 16 по одному из третьих входов анализатора 9 сообщают о готовности информации в регистре 14 для ее считывания в анализатор 9. В анализаторе 9 опрашивают сигнал с выхода триггера 16 и по его единичному состоянию выхода на одном из вторых выходов анализатора 9 вырабатывают сигнал, которым воздействуют на третий вход регистра 14, считывают информацию с выходов регистра 14 в анализатор 9 по его вторым входам и запоминают, по третьему входу триггера 16 устанавливают его выход в нулевое состояние.
Таким образом, в анализатор 9 с регистров 13 и 14 с начала цикла измерения после появления импульсов фронта и среза на первом и втором выходах формирователя 11, сформированных из импульсов считывания метки объекта 3, считывают аргумент функции приближения, иначе текущее время, выраженное количеством импульсов генератора 10, при этом каждый раз после считывания аргумента функции в анализаторе 9 выполняют операцию вычитания из текущего аргумента функции приближения, измеренного по фронту или срезу импульса считывания метки объекта 3, предыдущего аргумента функции приближения, измеренного по срезу или фронту импульса считывания метки объекта 3. Полученную разность, равную интервалу времени между фронтом и срезом импульсов считывания меток объекта 3, запоминают в анализаторе 9, а предыдущее измеренное значение аргумента функции приближения удаляют из памяти анализатора 9.
Этот процесс продолжают до тех пор, пока в блоке 8 не сравняются уставка 1 с количеством целых оборотов вала 1, подсчитываемых на первом входе блока 8 с выхода позиции 5 считывания.
При равенстве уставки 1 с количеством импульсов считывания метки целых оборотов вала 1, поступивших на первый вход блока 8, в блоке 8 подготавливают операцию по завершению цикла измерения, которую выполняют в момент времени прихода на второй вход блока 8 с выхода узла 7 первого импульса считывания метки объекта 3, следующего по времени сразу за последним импульсом считывания метки целого оборота вала 1, причем на четвертом выходе блока 8 вырабатывают сигнал, селектированный фронтом первого импульса считывания метки объекта 3 и сдвинутый на один период частоты генератора 10 относительно счетного импульса, воспринимаемого счетчиком 12 по первому входу и блоком 8 по четвертому входу. Сигналом с четвертого выхода блока 8 воздействуют на второй вход формирователя 11, при этом запрещают прохождение через него на первый и второй выходы формированных по фронту и срезу импульсов считывания меток объекта 3 на второй вход счетчика 12, при этом запрещают счет импульсов генератора 10, поступающих на первый вход счетчика 12, и устанавливают счетчик 12 в исходное состояние, на вторые входы триггеров 15, 16 и устанавливают их в исходное состояние. На третьих выходах блока 8 вырабатывают сигнал КОНЕЦ ИЗМЕРЕНИЯ и подают его на первые входы анализатора 9, где этот сигнал дешифрируют, и выполняют математические операции по определению углов между метками объекта 3 в соответствии с функцией приближения и измеренными между ними интервалами времени, а результат выполнения математических операций выводят на входящие в состав анализатора 9, например, экран видеотерминала либо печатающее устройство. Дополнительно в анализаторе 9 с его клавиатуры задают допустимое значение отклонений функции приближения от угла относительного поворота между объектом 3 и позицией 4 считывания его меток, вычисляют эти отклонения, сравнивают и в зависимости от результата сравнения корректируют уставку 1 и повторяют цикл измерения с новым значением уставки 1 до обеспечения условия, при котором отклонения функции приближения от угла относительного поворота между объектом 3 и позицией 4 считывания его меток не превышают допустимого значения отклонений.
Когда измеряют углы между метками непрерывно вращающегося объекта 2 контроля, закрепленного на валу 1 и сцентрированного по отношению к оси вращения вала 1, имеющего малые момент трения, торцевые и радиальные биения, в цикле измерения интервалов времени между моментами прохождения меток объектом 2 их позиции 6 считывания-записи в течение уставки 1, то полностью повторяют действия, выполняемые в цикле измерения объекта 3, кроме выбора объекта 2, который производят до начала цикла измерения под воздействием сигнала с второго выхода блока 8 на третий вход узла 7, при котором импульсы считывания меток с выхода позиции 6, подаваемые на второй вход узла 7, проходят на его выход, а импульсы, подаваемые на его первый вход с выхода позиции 4, ан выход узла 7 не проходят.
По окончании цикла измерения в анализаторе 9 определяют углы между метками объекта 2, выполняя математические операции в соотсветствии с функцией приближения и измеренными между метками объекта 2 интервалами времени.
При известном функциональном законе углового расположения меток по делительной окружности объекта 2 контроля в память анализатора 9 с его клавиатуры вводят расчетный массив значений углов между метками, который должен быть получен, например, технологически при изготовлении объекта 2. В анализаторе 9 сравнивают расчетный массив значений углов между метками с измеренными значениями этих же углов и определяют массив отклонений (разностей) измеренного значения относительно расчетного угла между соответствующими метками объекта 2, по которым в анализаторе 9 определяют влияние эксцентриситета положения объекта по отношению к оси вращения вала 1, величину первой гармоники для каждого значения угла между соответствующими метками объекта 2 и корректируют измеренные значения каждого из углов между метками объекта 2 на соответствующие угловые величины влияния эксцентриситета.
Когда измеряют углы между метками непрерывно вращающегося другого одинакового объекта 2 контроля, закрепленного на валу 1 и сцентрированного по отношению к оси вращения вала 1, имеющего момент инерции, значительно больший момента инерции другого одинакового объекта 2, и малые момент трения, торцевые и радиальные биения, то его углы между метками в соответствии с измеренными интервалами времени между моментами прохождения ориентированной позиции 6 определяют по ранее установленной функции приближения для другого одинакового по физическим свойствам и параметрам объекта описанными ранее действиями с сохранением иных условий, обеспечивающих выполнение действий, описанных ранее.
Для выполнения этого условия до начала цикла измерения с первых выходов анализатора 9 на третьи входы блока 8 задают уставку 1 (количество целых оборотов вращения вала 1 то же, что и объекта 2), уставку 2 (величину периода вращения одинакового объекта относительно позиции 6 с ранее установленной функцией приближения) и сигнал ПУСК, которые в блоке 8 дешифрируют и запоминают. На четвертом выходе блока 8 вырабатывают сигнал, которым воздействуют на второй вход формирователя 11 и запрещают прохождение на его выходы сигнала считывания меток объекта 2, действующих на его первом входе.
Кроме того, сигналом на четвертом выходе блока 8 воздействуют на второй вход счетчика 12, на вторые входы триггеров 15, 16, устанавливают триггеры 15, 16 и счетчик 12 в исходное состояние, запрещают счет импульсов, поступающих с выхода генератора 10 на первый вход счетчика 12.
При вращении объекта 2 с выхода позиции 5 на первый вход блока 8 подают импульсы, период которых непрерывно измеряют в блоке 8 и сравнивают с уставкой 2. В момент времени прихода импульса считывания метки целого оборота при наличии сигнала ПУСК, когда период вращения объекта 2 будет находиться, например, в пределах
Tу < To < (1+10),
где
Tу - уставка 2 (величина первого периода вращения одинакового объекта с ранее установленной функцией приближения),
To - период вращения одинакового объекта 2 контроля,
в блоке 8 выполняют подготовку к формированию начала цикла измерения, которую завершают по моменту времени прихода на второй вход узла 7 с выхода позиции 6 первого импульса считывания метки объекта 2, следующего за импульсом считывания метки целого оборота вращения объекта 2, период которого находится в пределах
Tу < To < Ту (1+10).
Далее полностью повторяют действия в цикле измерения интервалов времени между моментами прохождения меток объекта 2 позиции 6 в течение заданной уставки 1.
Для более точной привязки по начальным условиям к ранее установленной функции приближения одинакового объекта 2 в анализаторе 9 выполняют дополнительно операции сравнения периодов вращения одинакового объекта с ранее установленной функцией приближения с периодами вращения объекта 2 контроля.
При разности периодов в течение уставки 1, находящихся в допустимых пределах для заданной точности измерения углов между метками объекта 2, за начальный аргумент функции приближения одинакового объекта 2 по времени принимают начало его периода вращения, который равен первому периоду одинакового объекта с ранее установленной функцией приближения или отличается на величину, допустимую для заданной точности измерения углов между метками объекта 2. Затем в анализаторе 9 определяют углы между метками объекта 2 контроля, выполняя математические операции в соответствии с ранее установленной функцией приближения, принятым по условию начальным аргументом и измеренными между метками объекта 2 интервалами времени.
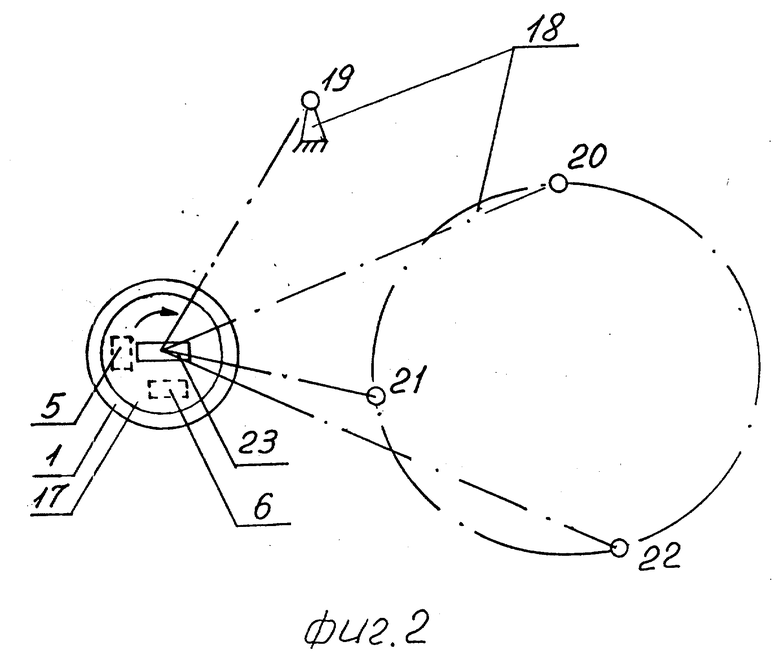
Когда измеряют в плоскости анализа углы между метками объекта 3 контроля, при прохождении которых ориентированными на него непрерывно вращающимися на выбеге позициями считывания, закрепленными на валу 1 так, что их визирные линии находятся в одной плоскости анализа с осью вращения вала 1, имеющего совместно с позициями считывания большой момент инерции и малые момент трения, торцевые и радиальные биения, то углы в плоскости анализа между метками объекта 3 определяют в соответствии с измеренными интервалами времени между моментами прохождения вращающимися позициями считывания меток объекта по ранее установленной функции приближения описанными ранее действиями с сохранением условий, обеспечивающих выполнение описанных ранее действий.
На фиг. 2 изображено устройство измерения в плоскости анализа углов между метками объекта контроля (вариант).
Устройство содержит вал 1 вращения, имеющий метки считывания целого оборота вала и его долей, объект 17 контроля, выполненный, например, в виде стеклянного лимба или диска, закрепленный на валу 1 и сцентрированный по оси вращения вала, объект 18 контроля, у которого одна из меток 19 - 22, например метка 19 считывания или их частная совокупность, могут быть неподвижными, закрепленную на валу 1 позицию 23 считывания-записи, выполненную в виде приемо-передающего преобразователя сигналов и ориентированную во вращающейся плоскости анализа на метки 19 - 22 объекта 18 контроля, выход которой подсоединен к первому входу узла 7 выбора (фиг. 1), а вход записи подсоединен к одному из двух первых выходов блока 8 (на фиг. 2 связи не показаны). Устройство также содержит позиции 5 и 6 считывания-записи соответственно меток целого оборота вращения вала 1 и меток объекта 17, выходы которых подсоединены соответственно к первому входу блока 8 и ко второму входу узла (7 фиг. 1) и вход записи позиции 6 подсоединен ко второму из первых двух выходов блока 8 (на фиг. 2 связи не показаны).
Устройство по варианту (фиг. 2) работает следующим образом.
Вал 1 с позицией 23 ориентируют в плоскости анализа считывания меток 19 - 22 объекта 18 контроля так, чтобы при измерениях после метки целого оборота во времени следовала неподвижная метка 19 объекта 18, раскручивают вал и оставляют в режиме выбега.
С первых выходов анализатора 9 (фиг. 1) на третьи входы блока 8 задают уставку 1 (количество целых оборотов вращения вала 1 и выбор объекта 18), уставку 2 (величину периода вращения вала 1 то же, что объекта 17, относительно неподвижной метки 19 объекта 18 с ранее установленной функцией приближения) и сигнал ПУСК, полностью повторяют действия в цикле измерения интервалов времени прохождения позицией 23 считывания моментов времени между метками 17 объекта 18, выполняемые при измерении углов между метками непрерывно вращающегося другого объекта, например объекта 17, из исключением того, что для более точной привязки по начальным условиям к ранее установленной функции приближения в анализаторе 9 при определении углов между метками объекта 18 в плоскости анализа за начальный аргумент (начало отсчета) функции приближения принимают по времени начало периода вращения позиции 23 относительно неподвижной метки 19 объекта 18, который равен периоду вращения вала 1 с ранее установленной функцией приближения или отличается на величину, допустимую для заданной точности измерения углов в плоскости анализа. В анализаторе 9 в плоскости анализа определяют углы между метками 19 - 22 объекта 18, выполняя математические операции в соответствии с ранее установленной функцией приближения, принятым по условию начальным аргументом и измеренными между метками интервалами времени.
При формировании угловых меток на объекте выполняют следующие операции. На валу 1 (фиг. 1) устанавливают, центрируют относительно оси вращения вала 1, закрепляют объект 3, выполненный, например, в виде стеклянного диска с напылением на одной его поверхности тонкой пленки металла, ориентируют позицию 4 считывания-записи относительно объекта 3.
В анализатор 9 задают, например, с его клавиатуры формируемую топологическую структуру на объекте 3 и допустимую погрешность формирования угловых меток на объекте 3, где эту информацию запоминают. Раскручивают вал 1 и оставляют в режиме выбега. С первых выходов анализатора 9 на третьи входы блока 8 задают уставку 1 (количество целых оборотов вращения вала 1, выбор объекта 2, выполненного, например, в виде стеклянного лимба, сцентрированного по оси вращения вала 1 и неподвижно закрепленного на валу 1), и сигнал ПУСК. После этого выполняют ранее описанные операции в цикле измерения интервалов времени между метками объекта 2, по которым определяют параметры функции приближения в течение уставки 1 с отклонениями от угла поворота вала 1 относительно позиций считывания, не превышающими значения, устанавливаемого в зависимости от заданной допустимой погрешности формирования угловых меток на объекте 3. После определения параметров функции приближения останавливают вал 1. В анализаторе 9 рассчитывают функцию формирования угловых меток объекта 3 по заданной топологической структуре в соответствии с установленной функцией приближения и заносят в память в виде массива углового положения формируемых угловых меток. Затем с первых выходов анализатора 9 заносят в память блока 8 по его третьим входам функцию формирования угловых меток на объекте 3, уставку 1, уставку 2 (величину периода вращения объекта 3 с ранее установленной функцией приближения), уставку 3 (количество меток объекта 2), сигнал ПУСК. В блоке 8 информацию дешифрируют и запоминают, на его втором выходе вырабатывают сигнал выбора объекта 2, на четвертом его выходе вырабатывают сигнал, которым воздействуют на второй вход формирователя 11 и запрещают прохождения на его выходы сигналов считывания меток объекта 2, действующих на его первом входе. Кроме того, сигналом на четвертом выходе блока 8 воздействуют на второй вход счетчика 12, на вторые входы триггеров 15, 16, устанавливают триггеры 15, 16 и счетчик 12 в исходное состояние и запрещают счет импульсов, поступающих с выхода генератора 10 на первый вход счетчика 12. Раскручивают вал 1 и оставляют в режиме выбега.
При вращении объекта 2 с выхода позиции 5 на первых вход блока 8 и с выхода узла 7 на второй вход блока 8 подают импульсы, где непрерывно измеряют их период и количество и сравнивают с уставками 1, 2 и 3. В момент времени прихода импульса с выхода узла 7 на второй вход блока 8, когда разность периодов вращения объекта 3 и уставки 2 будет находиться в допустимом пределе для формирования угловых меток, в блоке 8 вырабатывают сигнал начала цикла формирования угловых меток на объекте 3. На одном из первых выходов блока 8 вырабатывают импульсы записи, которые подают на вход записи позиции 4 в соответствии с функцией формирования угловых меток на объекте 3 по текущему времени, определяемому подсчетом количества импульсов с выхода генератора 10 на четвертом входе блока 8. Кроме того, на четвертом выходе блока 8 вырабатывают сигнал, которым снимают запрет счета импульсов с выхода генератора 10, поступающих на первый вход счетчика 12, по второму входу формирователя 11 разрешают прохождение через него сформированных по фронту и срезу импульсов считывания меток объекта 2 (долей оборотов вала 1) с его первого и второго выходов на первые входы триггеров 15 и 16 соответственно.
Таким образом, начало цикла формирования угловых меток на объекте 3 привязывают по времени к началу периода относительного вращения объекта 3, равного или близкого по величине (в допустимом пределе отклонений) уставке 2. Этот же момент времени используют в качестве начала цикла измерения интервалов времени между метками объекта 2 в течение уставки 1 и полностью повторяют ранее описанные действия до момента равенства количества целых оборотов вращения вала уставке 1.
С момента начала цикла формирования угловых меток на объекте 3 в блоке 8 подсчитывают количество импульсов меток объекта 2 (долей периодов вращения вала 2) и при достижении равенства с уставкой 3 на одном из его первых выходов прекращают вырабатывать импульсы, поступающие на вход позиции 4, и заканчивают формирование угловых меток на объекте 3.
По достижении равенства количества целых оборотов вращения вала и уставки 1 на четвертом выходе блока 8 вырабатывают сигнал, которым воздействуют на второй вход формирователя 11, прекращают измерение интервалов времени между метками объекта 2 и приводят схему измерения в исходное состояние готовности к новым циклам. На третьих выходах блока 8 вырабатывают сигналы о завершении циклов измерения и формирования угловых меток, подают их на первые входы анализатора 9, где эти сигналы дешифрируют. По значениям интервалов времени между метками объекта 2 в анализаторе 9 определяют функцию приближения для объекта 3 и сравнивают ее с ранее установленной для него функцией приближения. По результату сравнения судят о завершении цикла формирования угловых меток и делают предварительное заключение о точности формирования угловых меток на объекте 3. Для окончательного вывода о точности угловых меток на объекте 3, не снимая его с вала 1, производят измерение углов между сформированными на нем метками действиями, описанными ранее. После выполнения измерения углов между сформированными метками на объекте 3 значения измеренных углов сравнивают в анализаторе 9 с заданной топологической структурой, определяют угловые отклонения в положении меток (элементов структуры) и сравнивают их с допустимой угловой погрешностью. Если отклонения положения меток по углу не превышают допустимой угловой погрешности, то операции формирования угловых меток на объекте 3 признают завершенными, а объект 3 годным, если превышают допустимую угловую погрешность, то производят дополнительный контроль с целью разбраковки, установления причины возникновения недопустимых отклонений и устранения этих причин.
Если объект 3 годен, то в зависимости от потребности в тиражировании (копировании) его либо снимают с вала 1 либо перезаписывают на объект 2, при этом выполняют операции формирования (записи) угловых меток на объекте 2 синхронно с сигналами считывания меток с объекта 3. При перезаписи смещают позицию 6 относительно объекта 2 на свободное от меток поле, раскручивают вал 1, с первых выходов анализатора 9 на третьи входы блока 8 задают информацию о формировании угловых меток, о выборе объекта, уставки 1 и 3, сигнал ПУСК. В блоке 8 информацию дешифрируют и запоминают. На втором выходе блока 8 вырабатывают сигнал, которым выбирают объект 3. Затем первым импульсом метки с выхода позиции 5 в блоке 8 производят подготовку к выполнению цикла перезаписи, который начинают первым импульсом считывания метки объекта 3, прошедшим через узел 7, блок 8 на один из его первых выходов, подключенный к входу записи позиции 6. В блоке 8 подсчитывают количества импульсов меток, поступающих на его первый и второй входы, сравнивают с уставками 1 и 3, в момент их равенства завершают цикл формирования угловых меток на объекте 2. После этого производят измерение углового положения сформированных меток на объекте 2 и допусковый контроль действиями, описанными ранее, по результату которых судят о качестве выполнения операций перезаписи.
В предлагаемых способе и устройстве измерения углов и формирования угловых меток в качестве рабочей меры используют время, тем самым уменьшают число факторов, влияющих на точность измерения углов и формирования угловых меток, сводят их к двум, а именно к нестабильности частоты квантования времени и нестабильности преобразования фронтов меток объекта в течение сравнительно коротких интервалов времени выполнения циклов измерения и формирования, чем достигают наивысшую точность измерения углов и формирования угловых меток по сравнению с рассмотренными известными аналогами.
Таким образом, предлагаемые способ и устройство могут быть использованы в качестве метода и средства для аттестации и проверки высокоточных испытательных угловых полигонов, угломерных приборов, стендов, датчиков, изделий в сборе по входным сигналам преобразователей угла без внутреннего механического вмешательства в них.
Способ и устройство позволяют производить в широком диапазоне измерения углов между метками контролируемых объектов как движущихся, так и неподвижных.
Предлагаемые способ и устройство по сравнению с известными аналогами из-за простоты реализации, обусловленной в том числе совмещением выполнения двух функций измерения и формирования угловых меток в одном устройстве, позволяют сравнительно легко автоматизировать технологические процессы измерения углов, изготовления, тиражирования (копирования), хранения угловых мер, например шкал, сеток, кодовых масок оптических приборов и фотоэлектрических преобразователей информации.
Способ и устройство позволяют легко сопрягать технологию лазерной обработки тонких пленок на подложках в процессах измерения, изготовления, тиражирования, хранения угловых мер, минуя многостадийность аналогичных процессов, например фотолитографии, что исключает все операции фотолитографического процесса, в том числе химические и само оборудование фотолитографии. Это снижает требования к физическим и химическим свойствам пленки и поверхностным слоям подложки что дает возможность сразу получать с высокими механическими свойствами к истиранию металлизированные стабильные угловые меры с высокой разрешающей способностью, например, сетки, лимбы, маски, оптические диски памяти без эмульсионных негативов и использовать их в качестве рабочих образцов и эталонов для последующего тиражирования, что позволяет контролировать параметры угловых мер в процессе изготовления и обеспечить значительный выигрыш в производительности. Это позволяет хранить рабочие образцовые и эталонные угловые меры как в памяти вычислительного анализатора, так и на других носителях информации, причем несколько копий различных угловых мер на одном носителе, встроенном непосредственно в устройство измерения углов и формирования угловых меток в качестве носителя информации и в качестве объекта контроля, и как часть вала вращения, имеющего угловые метки целых оборотов и его долей, что позволяет снизить затраты, в том числе трудоемкость на измерение, изготовление, тиражирование (копирование) и хранение угловых мер. Это позволяет снизить субъективность результатов измерения и повысить достоверность контроля угловых мер.
Способ и устройство легко сочетаются с техническими средствами дальнометрии, что позволяет наиболее эффективно использовать их в строительстве, в геодезии и в навигации, когда позиции считывания-записи угловых меток выполняют в виде приемопередающих устройств зондирующих сигналов.
Предлагаемые способ и устройство позволяют разрабатывать новый класс быстродействующих углоизмерительных устройств, в том числе без механических вращающихся углов, например вала, ротора, шпинделя, при выполнении позиций считывания-записи на базе сканирующих систем с электрическим управлением пространственным положением плоскости анализа углов в функции от времени, что наиболее перспективно в системах кругового обзора и защит летательных аппаратов от столкновений с объектами.
Изобретение проверено в промышленных условиях на базе автоматизированной установки контроля лимбов, реализованной по авт. св. СССР 1049736, кл. G 01 C 1/06; G 01 C 25/00. Получены положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| УСТРОЙСТВО для КОНТРОЛЯ точности НАНЕСЕНИЯ ШТРИХОВ НА КРУГАХ ОПТИЧЕСКИХ ТЕОДОЛИТОВ | 1969 |
|
SU250469A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОЛОЖЕНИЯ КЛАПАНА | 2010 |
|
RU2431071C1 |
| Устройство для контроля дорожек лимбов угломерных приборов | 1981 |
|
SU1049736A1 |
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1986 |
|
SU1384932A1 |
| Устройство для измерения неравномерности скорости вращения | 1974 |
|
SU559179A1 |
| СПОСОБ КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2042943C1 |
| Устройство для измерения неравномерности скорости вращения | 1981 |
|
SU972408A2 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
Изобретение относится к измерительной технике и может быть использовано в астрономии, навигации, геодезии, технической физике, точном машиностроении и приборостроении, оптико-механической и оптико-электронной промышленности и в строительстве сооружений. Способ изобретения заключается в том, что непрерывно измеряют интервалы времени между моментами прохождения меток объекта контроля в течение заданных угловых оборотов непрерывного относительного вращения между объектом контроля и позициями считывания-записи его меток, запоминают их и определяют по ним углы между метками объекта контроля по формуле приближения. При этом угловые метки на объекте формируют синхронно с сигналами записи меток заданной топологической структуры в соответствии с ранее установленными параметрами формулы приближения, за счет чего достигают повышения точности измерений при сравнительно высоком быстродействии и простоте реализации. Устройство содержит вал вращения с метками считывания, объекты контроля, позиции считывания-записи, узел выбора объекта контроля, блок управления, анализатор вычислительный, генератор высокостабильной частоты импульсов, формирователь фронта и среза, счетчик импульсов, триггеры и триггеры. Изобретение позволяет повысить точность измерения углов. 2 с. и 5 з.п.ф-лы, 2 ил.
ϕ = F(t-to),
где ϕ - угол относительного поворота между объектом контроля и позициями считывания-записи его меток;
F - функция приближения;
t - аргумент функции, соответствующий текущему времени измерения;
t0 - начальный аргумент, соответствующий началу отсчета времени.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1689756, G 01 C 1/06, 1989 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1326886, G 01 C 1/06, 1985. | |||

