Изобретение относится к измерительной технике и может быть использовано при конструировании устройств для определения взаимного разворота (угла скручивания) разнесенных объектов, для передачи на расстояние направления вектора, например азимутального направления, из плоскости одного уровня в плоскость другого уровня и др.
В настоящее время известны фотоэлектрические автоколлимационные устройства для определения углового положения отражателя с линейчатым растром в качестве марки, фотоприемным устройством (ФПУ), перед приемной частью которого установлен сопряженный растр. Смещение изображения растра относительно установленного перед ФПУ сопряженного растра вызывает изменение энергии выходного оптического сигнала, что регистрируется фотоприемником. Ввиду небольшого линейного диапазона такие устройства не нашли широкого применения.
Известно, например, фотоэлектрическое автоколлимационное устройство для измерения углов поворота [а.с. СССР №798483, МПК G01B 21/00, приор. 04.01.79], содержащее осветитель с прозрачным штрихом в качестве марки, отражатель, скрепляемый с объектом, оптически связанный с ним объектив, фотоприемную систему в виде прибора с зарядовой связью (ФПЗС), снабженное блоком управления и блоком обработки сигналов в виде формирователя видеоимпульсов, счетчика со схемой управления и синхрогенератора. ФПЗС этого устройства совместно с блоком управления и блоком обработки сигналов преобразует пространственное положение изображения на фоточувствительном регистре во временную развертку видеосигналов с последующим измерением временных интервалов между видеосигналами. Однако при малых масштабах преобразования угловой величины в линейную такие устройства не могут обеспечить требуемую точность измерений.
Наиболее близким по совокупности признаков к предлагаемому изобретению является выбранное нами в качестве прототипа устройство для определения пространственной ориентации объекта [пат. РФ №2182311, МПК G01B 11/26, приор. 10.05.2001], содержащее два установленных навстречу друг другу отражателя, один из которых выполнен в виде блока прямоугольных призм, объектив, установленные в предметной плоскости объектива две марки с осветителями и оптической системой из микрообъективов с приемными призмами, формирующей симметрично оси объектива изображения марок, жестко связанный с марками элемент привязки, определяющий контролируемое направление, и снабженное призменным блоком сведения, блоком управления и блоком обработки сигналов приемное устройство, выполненное в виде фотоэлектрического прибора с зарядовой связью, фоточувствительный регистр которого совмещен с плоскостью изображений микрообъективов.
В этом устройстве для построения изображения используются промежуточные и разнесенные в пространстве оптические элементы, увеличивающие масштаб преобразования измеряемой величины. Результаты измерений становятся зависимыми от микроизменений положения этих элементов, что снижает стабильность и точность показаний. Кроме этого, точность устройства снижается ввиду автоколлимационного эффекта, вследствие которого анализируемые изображения смещаются при угловом рассогласовании между предметной плоскостью объектива и плоскостью ребер отражателя.
Техническим эффектом заявляемого устройства является высокая точность измерений пространственной ориентации объектов и упрощение конструкции.
Такой эффект достигается тем, что в устройстве пространственной ориентации объектов, включающем выполненный в виде блока прямоугольных призм отражатель, объектив, установленные в предметной плоскости объектива две жестко связанные между собой марки, каждая из которых с излучателем и оптической формирующей системой образует два оптических канала, оси которых симметричны относительно оси объектива, жестко связанный с марками элемент привязки, определяющий контролируемое направление, и приемное устройство в виде фотоэлектрического прибора с зарядовой связью, снабженное блоком управления и блоком обработки сигналов, отличающееся тем, что между объективом и отражателем дополнительно размещен узел стабилизации показателя преломления оптической среды, марки расположены симметрично относительно плоскости, проходящей через ось объектива, и выполнены в виде одинаковых линейчатых растров, линии которых перпендикулярны плоскости симметрии марок, каждый растр дополнен элементом, размер сечения которого монотонно убывает или возрастает по отношению к плоскости симметрии марок, фотоприемное устройство выполнено с двумя параллельными между собой фоточувствительными регистрами, отстоящими друг от друга на расстоянии, равном расстоянию между оптическими каналами, и расположенными в плоскости, перпендикулярной плоскости марок и совмещенной с плоскостью изображений объектива, блок обработки сигналов выполнен так, что обеспечивает формирование видеоимпульсов, их синхронизацию, позиционирование фронтов видеоимпульсов посредством счета синхроимпульсов, суммирование синхроимпульсов, позиционирующих фронты видеоимпульсов каждого регистра, определение разности этих сумм для двух регистров, разности длительностей видеосигналов, образованных дополнительными элементами растров марок, и содержит память для записи и хранения поправок, а элемент привязки выполнен в виде прямоугольного зеркала, ребро которого параллельно или перпендикулярно линиям растров.
Подходы к решению задачи стабилизации показателя преломления оптической среды известны.
Подходы к решению задачи передачи излучения в предметную плоскость и плоскость изображений объектива известны. Они решаются по-разному в зависимости от пространственной компоновки узлов устройства.
Подходы к выполнению функций блока обработки сигналов известны.
На фиг.1 представлена принципиальная схема заявляемого устройства, где показаны отражатель 1 в виде блока прямоугольных призм, объектив 2, узел 3 стабилизации показателя преломления оптической среды, излучатели 4, 5, оптическая система, формирующая два симметричных оси объектива канала и состоящая из коллиматоров 6, 7, диафрагм 8, 9 и линз 10, 11, блок 12 жестко связанных марок, предметная плоскость 13 объектива 2, светоделитель 14, фотоэлектрический прибор 15 с зарядовой связью (ФПЗС), плоскость 16 изображений объектива 2, призма 17, прямоугольное зеркало 18;
I - задающий блок, II - приемный блок;
φ - измеряемый угол скручивания; ψ - угол наклона отражателя вдоль его ребер относительно предметной плоскости объектива;
S - расстояние между каналами оптической системы.
Пунктирной линией оконтурены задающий и приемный блоки.
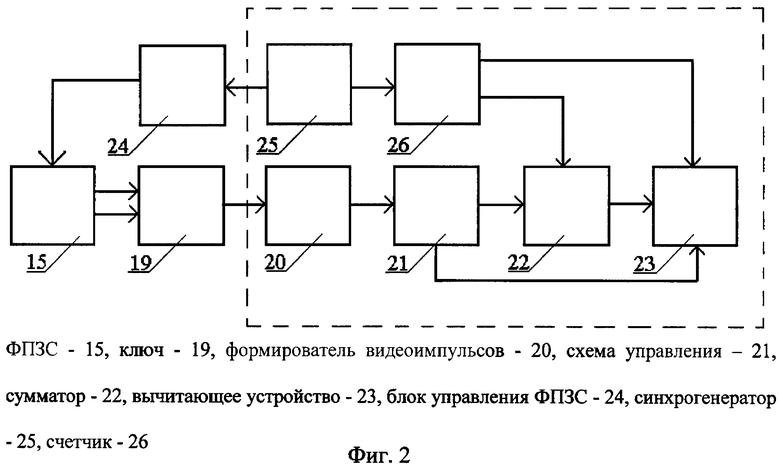
На фиг.2 представлена блок-схема электронной части устройства, где ФПЗС - 15, ключ - 19, формирователь видеоимпульсов - 20, схема управления - 21, сумматор - 22, вычитающее устройство - 23, блок управления ФПЗС - 24, синхрогенератор - 25, счетчик - 26;
→ - функциональные электрические связи между электронными узлами. Пунктирной линией обозначены электронные узлы, входящие в блок обработки сигналов.
На фиг.3 представлены изображения марок с условно принятым количеством полос растра n=4, где показаны расстояние S между центрами изображений, смещения l1, l2 центров изображений от согласованного положения по углу φ скручивания, расстояния L1, L2 центров изображений до начала соответствующего регистра, положения R1, R2 центров изображений относительно регистров при согласованном по углу ψ положении, положения R1 ', R2 ' регистров относительно смещенных из-за наличия углового ψ рассогласования изображений, величина смещения C центров изображений из-за угла ψ рассогласования.
Пунктирной линией обозначено согласованное по углу φ положение центров «O» изображений, штрихпунктирной линией - положения R1 ', R2 ' регистров относительно изображений при смещении последних из-за угла ψ рассогласования.
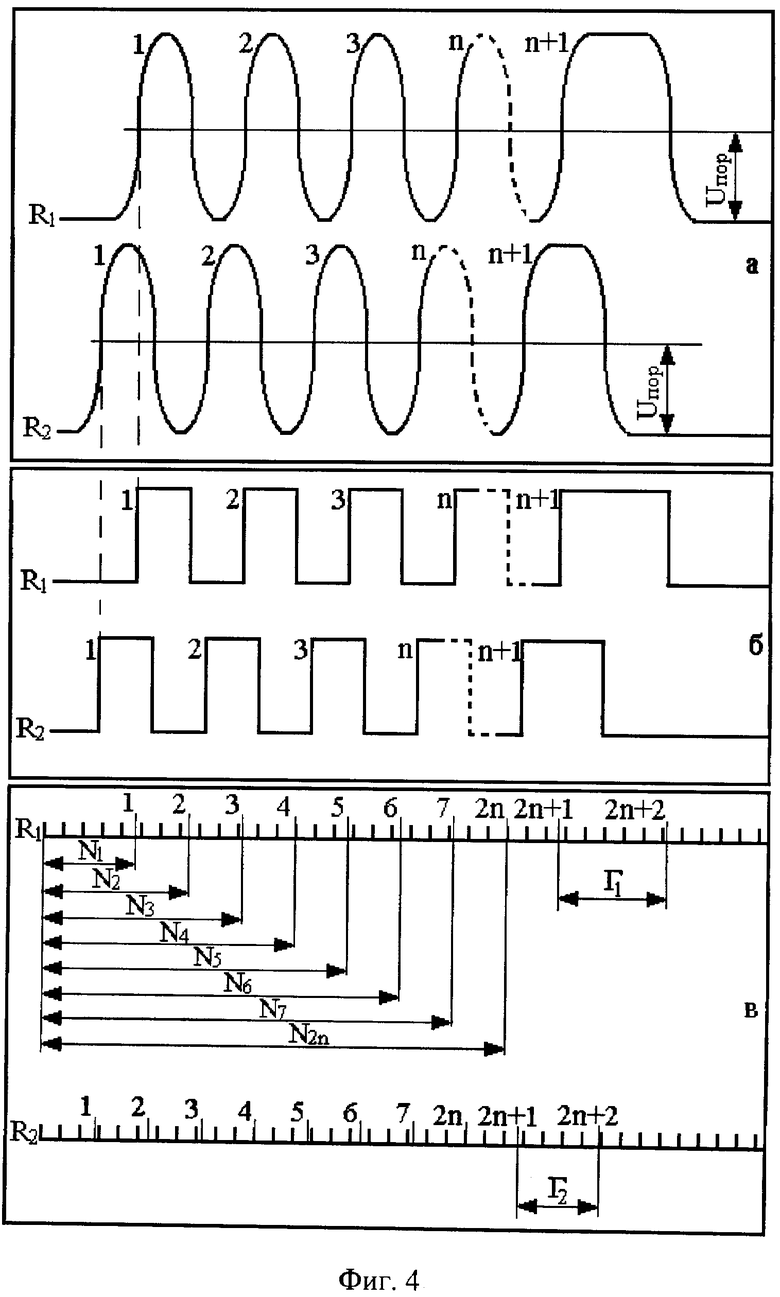
На фиг.4 представлена последовательность преобразований изображений марок во временные развертки: фиг.4, а - временная развертка видеосигналов; фиг.4, б - временная развертка видеоимпульсов; фиг.4, в - временная развертка фронтов видеоимпульсов на сетке синхроимпульсов, где показаны обозначения регистров R1, R2 ФПЗС, порога Uпор преобразований видеосигналов, последовательность 1, 2, 3, …, n линий растра, дополнительный (n+1)-й элемент растра, условно будем его называть «треугольник», количество считанных синхроимпульсов N1, N2, N3, …, Nn для 1, 2, 3, …, n фронтов видеоимпульсов соответственно, количество синхроимпульсов Г1 и Г2, считанных в сечениях изображений треугольников соответственно.
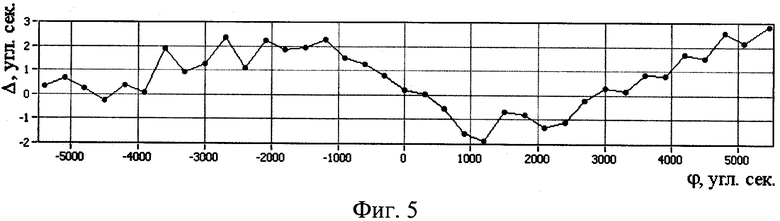
На фиг.5 представлены результаты измерения угла φ разворота призменного отражателя в диапазоне ±5400'' (±1,5°) относительно согласованного положения (пример конкретного исполнения), где Δ - разница между измеренными углами относительного разворота по прибору и по контрольному измерительному автоколлиматору.
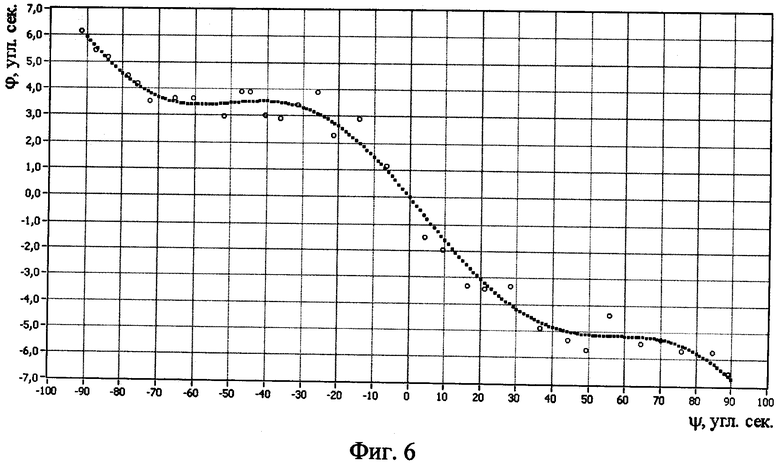
На фиг.6 представлена функциональная зависимость поправки измерения угла φ скручивания от величины угла наклона отражателя вдоль его ребер. Светлые точки - результаты измерений, темные точки - интерполяция с шагом одна угловая минута.
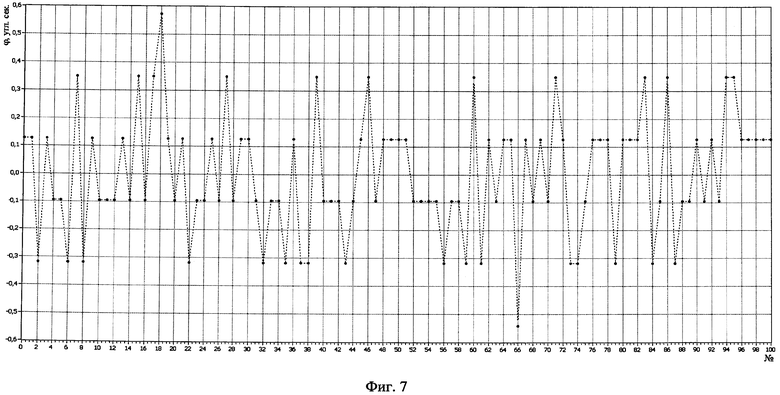
На фиг.7 представлена временная запись значений угла разворота φ при использовании узла стабилизации показателя преломления оптической среды - вакуумно-плотного кожуха, № - номер измерения. Давление среды внутри кожуха - ~100 Торр, дискретные точки - результаты измерения прибором с частотой 2 Гц.
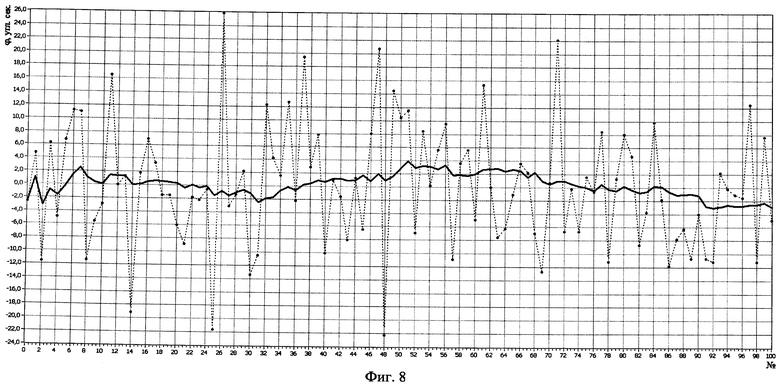
На фиг.8 представлена временная запись значений угла φ разворота в реальных условиях при отсутствии в оптическом тракте узла стабилизации показателя преломления оптической среды, № - номер измерения. Дискретные точки - результаты измерения прибором с частотой 2 Гц, ломанная кривая - результат усреднения по 20-ти предыдущим значениям.
Устройство работает следующим образом. Блок I в виде блока прямоугольных призм располагают на одном из двух контролируемых объектов, либо, в случае передачи направления вектора, - в плоскости базового направления. Пространственное положение ребер отражателя задает базовое направление. Блок II размещают на другом контролируемом объекте, либо в плоскости переноса базового направления в случае передачи вектора направления. В предложенном устройстве согласованное по углу скручивания φ положение (φ=0) блоков I и II соответствует такому положению отражателя 1, в котором его ребра параллельны линиям растров блока 12 марок. В это положение либо близкое к нему, обусловленное диапазоном измерений, устройство приводится разворотом одного из блоков.
Излучатели 4, 5 и оптические формирующие системы с марками образуют два оптических канала, оси которых симметричны относительно оси объектива.
Световые пучки от излучателей 4, 5 проходят оптические формирующие системы из коллиматоров 6, 7, диафрагм 8, 9, линз 10, 11 и марки, соответствующие каналам, связанные между собой в блок 12 и установленные в плоскости 13.
Благодаря тому что плоскость марок совмещена с предметной плоскостью 13 объектива 2, на выходе последнего образуется два пучка параллельных лучей (расчет объектива обеспечивает их схождение в зоне расположения отражателя 1). Поскольку фоточувствительные регистры ФПЗС 15 совмещены с плоскостью 16 изображений объектива 2, отраженные пучки строят изображения марок в плоскости этих регистров.
Приемы установки марки и фотоприемника соответственно в предметную плоскость и плоскость изображений объектива известны и могут быть выполнены, например, как показано на фиг.1, с помощью светоделителя 14 в виде прямоугольной призмы с полупрозрачной гипотенузной гранью и призмы 17, длина которой обеспечивает совмещение плоскости марок с предметной плоскостью 13 объектива 2. Блок 12 марок с излучателями 4, 5 и оптическими формирующими системами, объектив 2 и отражатель 1 образуют двулучевую автоколлимационную систему, которая дает возможность работать на различных расстояниях между блоками I, II, при этом не происходит расфокусировки изображений и изменения масштаба преобразования.
Ребро прямоугольного зеркала 18 элемента привязки установлено параллельно или перпендикулярно линиям растров марок и материализует контролируемое направление в плоскости переноса вектора направления. Благодаря тому что марки расположены симметрично плоскости, проходящей через ось объектива, а расстояние S между регистрами ФПЗС равно расстоянию между каналами оптической системы, в согласованном положении блоков I и II центры изображений марок будут совпадать с регистрами ФПЗС и отстоять на одинаковом расстоянии от их начала. При этом на фиг.3 регистры находятся в положениях R1, R2, центры марок лежат на линии «0», т.е. l1=0, l2=0, L1=L2, а сечения треугольников регистрами равны между собой.
При возникновении углов φ и ψ рассогласования между блоками I и II изображения марок меняют свои положения относительно регистров, при этом угол φ скручивания вызовет смещения l1 и l2 изображений марок вдоль регистров в разные стороны, т.е. между собой изображения разойдутся на величину l1+l2=L1-L2. Эта величина однозначно связана с величиной угла φ:

где S - расстояние между регистрами. Значение L1-L2 в предлагаемом устройстве является измеряемой величиной, через которую опосредованно определяется угол скручивания φ.
Ввиду того что предложенное устройство является автоколлимационным, при возникновении угла ψ рассогласования происходит смещение изображений на одинаковую величину C=2ψf, где f - фокусное расстояние объектива. Эта величина значительно превосходит измеряемую разность смещений L1 и L2 и в общем случае является мешающим воздействием.
В процессе измерений ребра отражателя 1 располагают параллельно линиям растров марок в блоке 12, поэтому смещение изображений марок происходит перпендикулярно регистрам, и при постоянной ширине полос растров не должно происходить изменения измеряемой величины L1-L2. Однако реальные растры могут иметь некоторые отступления, способные вызвать вариации измеряемой величины в зависимости от участка, на котором анализируется изображение. Поэтому в структуру марок был введен дополнительный элемент растра, в сечении монотонно убывающий или возрастающий по отношению к плоскости симметрии марок, в результате чего стало возможным по значению разности сечений в изображениях дополнительных элементов двух марок определять участки растров, на которых происходит анализ изображения, иными словами, позиционировать изображения в направлении его смещения, определяя тем самым значения угла ψ.
В процессе юстировки устройства определяют поправки в функции угла ψ, компенсирующие изменение рабочего сигнала для каждого участка анализируемого изображения, и эти поправки вносят в долговременную память устройства для всего рабочего диапазона угла ψ. В процессе измерений происходит автоматическое определение угла ψ и внесение соответствующей поправки в результат. Таким образом, устраняется влияние мешающего воздействия, т.е. повышается точность измерений. Подходы к решению такой задачи известны.
Из выражения (1) видно, что масштаб преобразования измеряемой линейной величины L1-L2 зависит только от значения S, иными словами, от величины смещения каналов оптической системы от оси объектива. Габариты оптической системы, а также ухудшение качества изображений для внеосевых пучков накладывают ограничения на максимальную величину этих смещений. Это обуславливает малые масштабы преобразований, что требует от систем позиционирования сверхвысоких точностей - на уровне сотых долей микрометра. Однако благодаря выполнению марок в виде одинаковых линейчатых растров стало возможным увеличение масштаба преобразований.
Синхрогенератор вырабатывает импульсы, являющиеся счетными для позиционирования элементов изображения. Одновременно он тактирует через блок управления 24 (фиг.2) работу ФПЗС 15, чем достигается синхронность временных разверток видеосигнала и счетных импульсов. Регистры ФПЗС работают в противофазе: когда один из них экспонируется, с другого считывается информация. В режиме считывания ключ 19 подключает соответствующий регистр на вход блока обработки сигналов, что позволяет проводить обработку сигналов двух оптических каналов одним и тем же электронным трактом.
На выходе каждого регистра в режиме считывания образуется временная развертка видеосигнала (см. фиг.4, а), которая в формирователе видеоимпульсов 20 фильтруется, сравнивается с пороговым напряжением Uпор и преобразуется в видеоимпульсы (см. фиг.4, б). Далее происходит выделение передних и задних фронтов видеоимпульсов (см. фиг.4, в), которые во временной развертке синхронизированы со счетными синхроимпульсами. Счетчиком 26 фронт 1 позиционируется числом N1, которое схемой управления 21 заносится в сумматор 22. Затем позиционируется фронт 2 с одновременным суммированием числа N2 и т.д. до фронта n включительно, при этом в сумматор будет записано число  , где i - порядковый номер фронта на первом регистре. Это число переносится в вычитающее устройство 23. Далее схема управления обнуляет счетчик и вновь включает его по фронту 2n+1, а по фронту 2n+2 записывает число Г1 в сумматор. После этого ключ подключает блок обработки сигналов к выходу другого регистра и все операции повторяются. В результате в вычитающее устройство заносится число
, где i - порядковый номер фронта на первом регистре. Это число переносится в вычитающее устройство 23. Далее схема управления обнуляет счетчик и вновь включает его по фронту 2n+1, а по фронту 2n+2 записывает число Г1 в сумматор. После этого ключ подключает блок обработки сигналов к выходу другого регистра и все операции повторяются. В результате в вычитающее устройство заносится число  (k - порядковый номер фронта на втором регистре) и Г2. После вычитаний получаются значения:
(k - порядковый номер фронта на втором регистре) и Г2. После вычитаний получаются значения:


где Kφ, Kψ - масштабные коэффициенты преобразований по углам φ и ψ соответственно.
Благодаря выполнению марок в виде линейчатых растров при суммировании смещений всех фронтов масштаб преобразования угла φ в линейную величину L1-L2 увеличивается в 2n раз, где n - число полос растра. При этом происходит увеличение относительной дискретизации измерений, поскольку при нормальном законе распределения фронтов внутри периодов счетных синхроимпульсов увеличение числа независимых фронтов в 2n раз приводит к росту относительной дискретизации определения суммы считанных синхроимпульсов в 2n раз по сравнению с относительной дискретизацией определения количества синхроимпульсов для одного фронта.
Пример конкретного исполнения
На нашем предприятии были изготовлены и аттестованы несколько однотипных устройств для измерения угла рассогласования между фиксированными направлениями в плоскости ребер отражателя 1 (см фиг.1) и элемента привязки 18.
Отражатель 1 был выполнен в виде блока из 9 призменных отражателей типа БР - 180, объектив с фокусным расстоянием - 1000 мм, расстояние между объективом и призменным отражателем варьировалось в диапазоне 3±0,5 м.
Марки были выполнены в виде линейчатых растров, количество штрихов 10, шаг 0,3 мм, и дополнены двумя прозрачными треугольниками, длинные стороны которых параллельны штрихам марки.
Прибор снабжен фотоэлектрическим приемным устройством с зарядовой связью, расположенным в плоскости, перпендикулярной плоскости марок и совмещенной с плоскостью изображений объектива. Фоточувствительные регистры прибора содержат по 1024 элемента шириной 13 мкм каждый (шаг ФПЗС) и высотой 40 мкм, расстояние между фоточувствительными регистрами, как и между каналами оптической системы, составляло 12,5 мм.
Направление штрихов марок материализовано с помощью жестко установленного на блоке марок элемента привязки в виде прямоугольного зеркала с ребром, параллельным штрихам марок.
Калибровка устройства осуществлялась следующим способом. Составные части устройства располагались на жестком массивном стенде, при этом ось объектива была направлена вдоль стенда параллельно горизонту, плоскость ребер призменного отражателя располагалась вертикально, а направление ребер - горизонтально. Для контроля положения призменного отражателя использовалась зеркальная поверхность торца отражателя, параллельная ребрам отражателя. Угол между направлением ребер и зеркальной плоскостью измерялся при изготовлении отражателя и паспортизовался. Нормаль к контрольной зеркальной поверхности направлялась вертикально вверх с помощью высокоточного измерительного автоколлиматора, вертикальное расположение визирной оси которого в свою очередь контролировалось по отражению от горизонтальной жидкостной поверхности масла в кювете. Аналогичным образом по отражению от прямоугольного зеркала элемента привязки, жестко связанного с блоком марок, контролировалось горизонтальное расположение на стенде штрихов марки. Результаты угловых измерений устройством в этом случае, соответствующие согласованному положению направлений штрихов марки и ребер призменного отражателя, заносились в память прибора в виде константы - «начального смещения».
Для определения масштабного коэффициента Kφ преобразования угла рассогласования φ призменный отражатель дискретно, с шагом 1', разворачивался вокруг оси объектива на угол ±10' с контролем положения по измерительному автоколлиматору. Стандартное значение масштабного коэффициента - Kφ≅0,224 угл.с/сч.ед. (варьируется в третьем знаке). При этом позиционирование изображения марки на каждом регистре происходит с точностью 0,05 мкм - цена шага дискретизации измерений.
Масштабный коэффициент Kψ определялся при повороте отражателя на угол ψ=±60'' относительно нулевого положения с контролем положения по измерительному автоколлиматору. Стандартное значение масштабного коэффициента Kψ≅0,127 угл.с/сч.ед. (варьируется в третьем знаке).
Типичные результаты измерения угла разворота φ призменного отражателя в диапазоне ±1,5° показаны на фиг.5. Экспериментальные результаты представлены в виде зависимости разницы (Δ) между измеренными углами относительного разворота по прибору (φ) и по контрольному автоколлиматору (φAК) от величины φAК:
Δ(φAК)=φ-φAК.
Как видно из чертежа, в указанном диапазоне углов разворота разность между результатами измерения угла тестируемым прибором и контрольным автоколлиматором составляет не более ±2,5''. Следует отметить, что при введении в память прибора «плавающего» масштабного коэффициента, зависящего от величины измеряемого угла, для компенсации тангенсоидальной зависимости преобразования (1) при заметных углах φ диапазон адекватного измерения угла разворота может быть существенно расширен.
Для определения поправок измерений угла разворота при ненулевых углах ψ призменный отражатель дискретно поворачивался по углу ψ в диапазоне ±90'' относительно нулевого положения, при этом с помощью контрольных автоколлиматоров поддерживалось согласованное по углу φ положение ребер отражателя и штрихов марки. Определяемые прибором значения угла φ заносились в память прибора в виде интерполированной с шагом 1' зависимости φ(ψ), которая использовалась в дальнейшем в качестве поправки. Типичный вид этой зависимости представлен на фиг.6.
Для минимизации рефракционных эффектов, обусловленных естественной турбулентностью среды в оптическом тракте, между объективом и призменным отражателем располагался компенсатор показателя преломления среды - вакуумно-плотный кожух. Временная запись измерения угла разворота при использовании описанного кожуха с пониженным давлением (~100 Торр, дискретные точки - результаты измерения с частотой 2 Гц) приведена на фиг.7. В этом случае разброс измеренных углов не превышал ±0,5''. Аналогичные результаты были получены при наполнении кожуха инертными газами гелий или неон. При отсутствии кожуха разброс значений измеренных углов возрастал до ±25'', что требовало использования режима накопления и усреднения результатов для получения приемлемой точности измерения (см. фиг.8). Очевидно, что при быстром изменении угла разворота такой режим не может быть использован.
Таким образом, нами теоретически обосновано и экспериментально показано, что при ограниченных расстояниях между центрами марок возможно значительное повышение достоверности измерения угла скручивания за счет повышения точности позиционирования изображений путем мультиплексирования самих изображений и их смещений, что достигается выбором марок в виде линейчатых растров особой конфигурации, а также расположением ребер отражателя параллельно линиям растров марок, при этом возможна компенсация мешающего воздействия автоколлимационного эффекта. Предложенное устройство определения пространственной ориентации объектов позволяет при относительно малых габаритах прибора обеспечить высокую точность и стабильность измерений углов разворота относительно двух взаимно перпендикулярных осей. Устройство многофункционально, оно с одинаковым успехом решает задачи взаимной ориентации объектов, переноса направления вектора из одной плоскости в другую, определение параллельности плоскостей и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2001 |
|
RU2182311C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2011 |
|
RU2478185C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| Оптико-электронное устройство для контроля положения объекта | 1985 |
|
SU1307230A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ОТКЛОНЕНИЙ ОБЪЕКТА | 1995 |
|
RU2083952C1 |
| Оптико-электронное устройство для измерения угловых отклонений объекта | 1986 |
|
SU1401269A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОВОРОТА ОБЪЕКТА | 2011 |
|
RU2471148C1 |

Изобретение относится к измерительной технике и может быть использовано при конструировании устройств для определения взаимного разворота (угла скручивания) разнесенных объектов. Заявленное устройство включает выполненный в виде блока прямоугольных призм отражатель, объектив, установленные в предметной плоскости объектива две жестко связанные между собой марки, каждая из которых с излучателем и оптической формирующей системой образует два оптических канала, жестко связанный с марками элемент привязки и приемное устройство в виде фотоэлектрического прибора с зарядовой связью, снабженное блоком управления и блоком обработки сигналов. Между объективом и отражателем дополнительно размещен узел стабилизации показателя преломления оптической среды. Фотоприемное устройство выполнено с двумя параллельными между собой фоточувствительными регистрами. Блок обработки сигналов выполнен так, что обеспечивает формирование видеоимпульсов, их синхронизацию, позиционирование фронтов видеоимпульсов посредством счета синхроимпульсов, суммирование синхроимпульсов, позиционирующих фронты видеоимпульсов каждого регистра, определение разности этих сумм для двух регистров, разности длительностей видеосигналов, образованных дополнительными элементами растров марок, и содержит память для записи и хранения поправок. Технический результат - высокая точность измерений пространственной ориентации объектов и упрощение конструкции. 8 ил.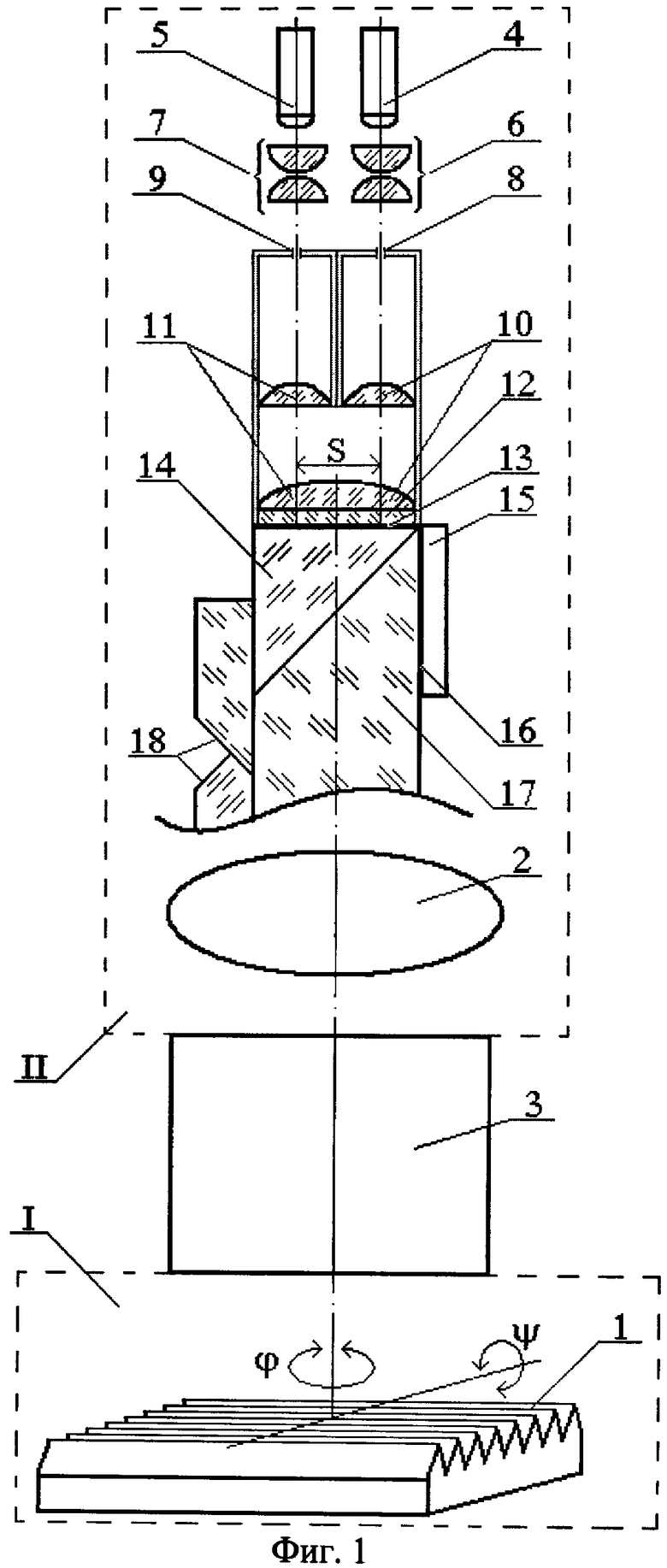
Устройство определения пространственной ориентации объектов, включающее выполненный в виде блока прямоугольных призм отражатель, объектив, установленные в предметной плоскости объектива две жестко связанные между собой марки, каждая из которых с излучателем и оптической формирующей системой образует два оптических канала, оси которых симметричны относительно оси объектива, жестко связанный с марками элемент привязки, определяющий контролируемое направление, и приемное устройство в виде фотоэлектрического прибора с зарядовой связью, снабженное блоком управления и блоком обработки сигналов, отличающееся тем, что между объективом и отражателем дополнительно размещен узел стабилизации показателя преломления оптической среды, марки расположены симметрично относительно плоскости, проходящей через ось объектива, и выполнены в виде одинаковых линейчатых растров, линии которых перпендикулярны плоскости симметрии марок, каждый растр дополнен элементом, размер сечения которого монотонно убывает или возрастает по отношению к плоскости симметрии марок, фотоприемное устройство выполнено с двумя параллельными между собой фоточувствительными регистрами, отстоящими друг от друга на расстоянии, равном расстоянию между оптическими каналами, и расположенными в плоскости, перпендикулярной плоскости марок и совмещенной с плоскостью изображений объектива, блок обработки сигналов выполнен так, что обеспечивает формирование видеоимпульсов, их синхронизацию, позиционирование фронтов видеоимпульсов посредством счета синхроимпульсов, суммирование синхроимпульсов, позиционирующих фронты видеоимпульсов каждого регистра, определение разности этих сумм для двух регистров, разности длительностей видеосигналов, образованных дополнительными элементами растров марок, и содержит память для записи и хранения поправок, а элемент привязки выполнен в виде прямоугольного зеркала, ребро которого параллельно или перпендикулярно линиям растров.
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2001 |
|
RU2182311C1 |
| ПОЛЯРИЗАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2310162C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 1996 |
|
RU2086917C1 |
| Жатка | 1977 |
|
SU631107A1 |
| DE 3445318 A1, 26.06.1986. | |||

