Изобретение относится к способу измерения расхода текучей среды между двумя точками, расположенными раздельно в направлении потока текучей среды; в соответствии с этим способом расход получают путем объединения измерения времен прохождения двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, с измерением фазовых сдвигов акустических сигналов, возникающих в каждом акустическом сигнале в результате прохождения каждого из упомянутых акустических сигналов по потоку.
В течение длительного времени расход (или объем) текучей среды, протекающей по трубопроводу, измеряют путем использования прохождения акустических сигналов, передаваемых между двумя акустическими преобразователями, расположенными в пространственно разделенных точках в направлении потока текучей среды.
По этому принципу акустический сигнал, передаваемый из первого преобразователя во второй преобразователь, принимается этим вторым преобразователем и затем измеряется время прохождения Т1 этого акустического сигнала.
Точно так же время прохождения Т2 акустического сигнала, передаваемого из второго преобразователя в первый преобразователь, измеряют после приема упомянутого сигнала первым преобразователем.
Расход Q текучей среды, проходящей по трубопроводу, может быть в этом случае записан следующим образом:
Q=(SL/2)(T2-T1)/Т1Т2,
где S обозначает среднюю площадь внутреннего сечения трубопровода, свободную для потока между двумя акустическими преобразователями, и L обозначает расстояние между преобразователями.
В настоящее время точное измерение времени прохождения акустического сигнала может быть относительно сложным, причем эта сложность зависит от требуемой точности.
По этим причинам способ фазовых измерений предпочтительнее способа измерения одного только времени прохождения, поскольку с фазовыми измерениями можно проще получать желаемую точность при измерениях расхода. Заявка 0426309 на получение Европейского патента раскрывает способ измерения расхода текучей среды, который может использоваться в измерителе расхода текучей среды и состоит в объединении измерения времен прохождения двух акустических сигналов, передаваемых в противоположных направлениях между двумя точками, пространственно разнесенными в направлении потока текучей среды, с измерением фазовых сдвигов акустических сигналов, возникающих в каждом акустическом сигнале в результате прохождения каждого из упомянутых акустических сигналов по потоку.
Расход Q текучей среды, протекающей по трубопроводу, может быть в этом случае записан следующим образом:
Q = (SL/4πFac)(2π[Fac(T2-T1)]+(ϕ2-ϕ1))/T1T2,
где Т1 и Т2 обозначают времена прохождения акустических сигналов, передаваемых в направлениях соответственно по течению и против течения потока текучей среды, ϕ2 и ϕ1 - соответственно фазовые сдвиги акустических сигналов, возникающие в каждом из акустических сигналов при их прохождении, a Fac обозначает частоту упомянутых акустических сигналов.
Это выражение содержит первый член, 2π[Fас(Т2-Т1)], который определяет число целых периодов, укладывающихся в разность между временами прохождения. Квадратные скобки [х] обозначают целую часть выражения х, находящегося в скобках. Второй член, ϕ2-ϕ1, определяет точный фазовый сдвиг, лежащий в пределах между -2π и 2π, который возникает в акустическом сигнале во время его прохождения и который обусловлен наличием расхода текучей среды между преобразователями. Этот второй член позволяет совершенствовать измерение и, таким образом, получать более точное измерение расхода. Величина Т1Т2, которая находится в знаменателе формулы расхода, соответствует квадрату среднего времени прохождения акустических волн, передаваемых против течения и по течению.
Учитывая, что Т1=L/c-v и Т2=L/c+v, где с и v обозначают соответственно скорость прохождения акустического сигнала и линейную скорость текучей среды, и поскольку скорость прохождения сигнала главным образом зависит от температуры, которая незначительно изменяется во время измерения расхода, величина Т1Т2 незначительно изменяется в зависимости от состава текучей среды, и, соответственно, эту величину не пересчитывают для каждого нового измерения.
По этой заявке, первое измерение времени прохождения акустического сигнала выполняют путем инвертирования фазы характерной точки сигнала передачи и детектирования сигнала, принимаемого в момент, соответствующий этой инверсии фазы. Детектирование этого момента осуществляется при помощи быстродействующего фазового детектора. Это измерение, выполненное в направлениях против течения и по течению, обеспечивает вычисление первого члена выражения, представленного выше: 2π[Fас(Т2-Т1)].
После дискретизации принятого сигнала восемью конденсаторами и после преобразования упомянутого дискретизированного сигнала в цифровую форму осуществляют измерение фазового сдвига акустического сигнала путем выполнения синхронного детектирования этого сигнала, преобразованного в цифровую форму, что позволяет определять фазовый сдвиг ϕ1 или ϕ2, который интерпретируется как разность фаз между фазой дискретизированного сигнала и фазой опорного сигнала.
После определения фазовых сдвигов акустических сигналов, соответствующих направлениям по течению ϕ1 и против течения ϕ2, согласно этому способу, член ϕ2-ϕ1 определяют разностью между ними.
Таким образом, складывая два члена 2π[Fас(Т2-Т1)] и ϕ2-ϕ1, расход текучей среды определяют более точно, чем прежде.
Однако в некоторых областях применения, где потребление энергии должно быть как можно меньше, особенно, если источник энергии - батарея и ее срок службы ограничен, необходимо снижать это потребление энергии до минимума.
Кроме того, такой способ определения расхода текучей среды довольно сложен для выполнения и требует значительных объемов цифровой обработки.
Таким образом, настоящее изобретение раскрывает способ измерения расхода текучей среды, при выполнении которого потребление энергии является более низким, чем у известных из уровня техники.
Следовательно, настоящее изобретение раскрывает способ измерения расхода текучей среды между двумя точками, пространственно разнесенными в направлении потока текучей среды, согласно которому величину расхода определяют путем объединения измерения времен прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, с измерением соответствующих фазовых сдвигов, возникающих в каждом акустическом сигнале в результате прохождения этого акустического сигнала по потоку; причем измерение фазового сдвига акустического сигнала, возникающего в каждом акустическом сигнале, состоит в дискретизации упомянутого акустического сигнала, принимаемого на частоте дискретизации, преобразовании дискретизированного сигнала в цифровую форму; и определении, посредством синхронного детектирования, фазового сдвига акустического сигнала в виде разности фаз между фазой дискретизированного сигнала и фазой опорного сигнала;
отличающийся тем, что упомянутый способ начинается с последовательных приближений, выполняемых на различных акустических сигналах, передаваемых последовательно в одном и том же направлении прохождения, путем введения во время (n+1)-й итерации в один из упомянутых сигналов, между шагом передачи сигнала и шагом синхронного детектирования, по меньшей мере, одного программно-управляемого фазового сдвига τр(n), привязанного к значению фазового сдвига акустического сигнала ϕ(n)+ϕref, который определяют синхронным детектированием, выполняемым во время предшествующей n-й итерации на ранее переданном сигнале, и который равен сумме значения разности фаз ϕerr(n) между фазой сигнала, дискретизированного во время предшествующей n-й итерации и фазой опорного сигнала, и значения программно-управляемого фазового сдвига 2πFacτp(n-1), который вводят во время n-й итерации,
где Fac обозначает частоту акустического сигнала, a τp(n-l) обозначает программно-управляемую задержку, определяемую на (n-1)-й итерации так, что шаг синхронного детектирования (n+1)-й итерации определяет разность фаз ϕerr(n+1) между фазой сигнала, дискретизированного во время текущей итерации, и фазой опорного сигнала, которая устремлена к нулю,
причем фазовый сдвиг ϕ(n+1)+ϕref акустического сигнала приблизительно равен программно-управляемому фазовому сдвигу 2πFacτp(n), вводимому во время (n+1)-й итерации.
Этот способ прост при выполнении и обладает высокой гибкостью при использовании.
В действительности, программно-управляемый фазовый сдвиг, который фактически является задержкой, вводимой в сигнал, может быть добавлен к упомянутому на подходящем шаге способа без изменения сущности и снижения эффективности упомянутого способа.
Программно-управляемый фазовый сдвиг можно успешно вводить в сигнал дискретизации во время шага дискретизации.
Кроме того, во время шага синхронного детектирования преобразованный в цифровую форму сигнал умножается на опорные сигналы, имеющие соответствующие формы синусоидального и косинусоидального опорных сигналов, имеющих опорную фазу, и затем программно-управляемый фазовый сдвиг может вводиться в синусоидальный и косинусоидальный опорные сигналы.
Можно также обеспечить введение программно-управляемого фазового сдвига в сигнал, передаваемый для генерации соответствующего акустического сигнала, во время шага передачи данного способа.
Чтобы уменьшить потребление энергии, производят независимое гетеродинирование принятого акустического сигнала, смешивая упомянутый принятый сигнал со смесительным сигналом так, чтобы получить смешанный сигнал, частота которого уменьшена, и тогда программно-управляемый фазовый сдвиг можно вводить в смесительный сигнал.
Согласно одному из вариантов осуществления изобретения программно-управляемый фазовый сдвиг разбивают, по меньшей мере, на два программно-управляемых вспомогательных фазовых сдвига, вводимых в сигнал, каждый на отдельном шаге способа между шагом передачи акустического сигнала и шагом синхронного детектирования.
Каждый программно-управляемый вспомогательный фазовый сдвиг предпочтительно определяют, выполняя Евклидово деление программно-управляемого фазового сдвига, как функции модуля разрешающей способности программно-управляемого статического фазового регулятора, связанного с соответствующим шагом, на котором должен водиться упомянутый вспомогательный фазовый сдвиг.
Например, программно-управляемый фазовый сдвиг разбивают на два программно-управляемых вспомогательных фазовых сдвига, вводимых соответственно в сигнал дискретизации и в опорные синусоидальный и косинусоидальный сигналы.
Чтобы дополнительно решать проблемы потребления энергии, частоту Fe дискретизации выбирают равной 4Fac/2n+l, где Fac обозначает частоту акустического сигнала, а n - целое число, большее или равное нулю.
При частоте дискретизации Fe, выбранной равной 4Fac, программно-управляемый фазовый сдвиг, разбиваемый на два программно-управляемых вспомогательных фазовых сдвига, вводимых соответственно в сигнал дискретизации и в синусоидальный и косинусоидальный опорные сигналы, приблизительно равен m(Fac/Fq)360o+k(Fac/Fe)360o, где (Fac/Fq)360o представляет разрешение программно-управляемого фазового сдвига, связанного с синусоидальным и косинусоидальным опорными сигналами, и (Fac/Fe)360o представляет разрешение, обусловленное дискретизацией, причем Fq обозначает самую высокую частоту следования тактовых импульсов, используемых для осуществления упомянутого способа.
Для того чтобы дополнительно уменьшить потребление энергии, необходимой для реализации способа, путем сокращения времени и объема вычислений, частоту Fe дискретизации делают равной 4Fac/2n+l, где число n - строго больше нуля.
Шаги дискретизации и преобразования в цифровую форму предпочтительно выполняют одновременно.
Кроме того, поскольку расход текучей среды выражается как отношение первого члена, который равен сумме значения 2π[Fас(Т2-Т1)], где скобка [х] обозначает целую часть выражения х в скобках, и где Т1 и Т2 - соответствующие времена прохождения акустических сигналов, переданных в двух направлениях распространения, где Fac - частота акустических сигналов и значения разности фазовых сдвигов акустических сигналов, вводимых в каждый сигнал ко второму члену, равному произведению упомянутых времен прохождения, причем времена прохождения измеряют различными способами для первого и второго членов.
Времена прохождения акустических сигналов измеряют для первого члена чаще, чем для второго.
Времена прохождения акустических сигналов измеряют для второго члена тогда, когда среднее значение от времен прохождения сигналов, передаваемых в двух направлениях распространения и представленных в первом члене, превышает заданный порог.
Времена прохождения акустических сигналов измеряют для второго члена, когда число измерений фазового сдвига акустического сигнала достигает заданного максимального числа.
Времена прохождения акустических сигналов измеряют для второго члена, когда удовлетворяется одно из двух предшествующих условий.
Для того чтобы измерить времена прохождения акустических сигналов, передаваемых в двух направлениях прохождения для первого члена, каждый упомянутый сигнал усиливают, формируют огибающую этого принятого сигнала, и упомянутое время прохождения определяют, отмечая момент перехода упомянутой огибающей через заданный порог.
Для того чтобы измерить времена прохождения акустических сигналов, передаваемых в двух направлениях прохождения, для второго члена, значения амплитуд каждого из упомянутых акустических сигналов в точках дискретизации сравнивают с пороговым значением, находят первую точку дискретизации сигнала, в которой значение амплитуды больше упомянутого порогового значения и от этой точки, находят следующий или конечный переход сигнала через нулевой уровень, таким образом определяя время прохождения упомянутого акустического сигнала на почти постоянном промежутке времени, который является одинаковым для двух времен прохождения.
Для поиска следующего перехода сигнала через нулевой уровень находят такие две последовательные точки дискретизации, между которыми есть точка, в которой амплитуда сигнала переходит через нулевое значение, и между этими двумя точками осуществляют прямолинейную интерполяцию с целью определения времени прохождения акустического сигнала.
Согласно одному варианту осуществления изобретения на каждой n-й итерации к программно-управляемой задержке τp(n) добавляют дополнительную программно-управляемую задержку R(n), которая должна вводиться за несколько последовательных приближений, причем погрешность Е фазы, обусловленная обратной сверткой гармонических линий после дискретизации, имеет периодическую функцию распределения с нулевым средним значением.
Таким образом, при добавлении дополнительной программно-управляемой задержки погрешность будет иметь распределение в виде синусоидальной функции с нулевым средним значением и, следовательно, будет компенсироваться за счет нескольких последовательных посылок акустического сигнала.
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие чертежи, на которых:
- фиг. 1 изображает блок-схему программы, представляющей различные шаги способа согласно одному из вариантов осуществления изобретения;
- фиг. 2 изображает блок-схему программы, представляющей различные шаги способа и осуществляемой при приеме переданного акустического сигнала, выполняемую на шаге измерения фазового сдвига акустического сигнала, представленной шагом d на фиг.1;
- фиг. 2а изображает результат различных последовательных измерений фазового сдвига акустического сигнала, выполненных согласно шагам способа фиг. 2;
- фиг.2b изображает цифровые значения, полученные в примере, показанном на фиг.2а;
- фиг.3 изображает упрощенную электронную схему, используемую для выполнения способа согласно варианту осуществления изобретения;
- фиг.3а иллюстрирует метод определения времени прохождения акустического сигнала с помощью сходимости к нулю;
- фиг.3b изображает более подробно электронную схему, представленную на фиг.3, используемую для определения времени прохождения акустического сигнала методом огибающей, со скоростью сигналов, соответствующей каждому шагу;
- фиг. 4 изображает частично детализированную электронную схему фиг.3 согласно варианту осуществления изобретения, в котором программно-управляемый фазовый сдвиг вводят во время шага дискретизации принятого акустического сигнала;
- фиг.4а изображает одновременную развертку по времени различных сигналов, используемых для дискретизации сигнала в случае, когда программно-управляемый фазовый сдвиг вводят во время шага дискретизации принятого акустического сигнала;
- фиг. 5 изображает частично детализированную электронную схему, представленную на фиг. 3 согласно первому варианту осуществления изобретения, в котором программно-управляемый фазовый сдвиг частично вводят во время шага дискретизации и частично в опорные сигналы, используемые для шага синхронного детектирования;
- фиг.6 изображает частично детализированную электронную схему, представленную на фиг. 3 согласно второму варианту осуществления изобретения, в котором программно-управляемый фазовый сдвиг вводят во время шага передачи акустического сигнала;
-фиг. 6а изображает одновременную развертку по времени различных сигналов, используемых для дискретизации сигнала в случае, когда программно-управляемый фазовый сдвиг вводят во время передачи акустического сигнала;
- фиг. 7 изображает частично детализированную электронную схему, представленную на фиг.3 согласно третьему варианту осуществления изобретения, в котором программно-управляемый фазовый сдвиг вводят во время шага гетеродинирования принятого акустического сигнала;
- фиг. 8 представляет значения точек дискретизации синусоиды и косинусоиды для двух различных частот дискретизации;
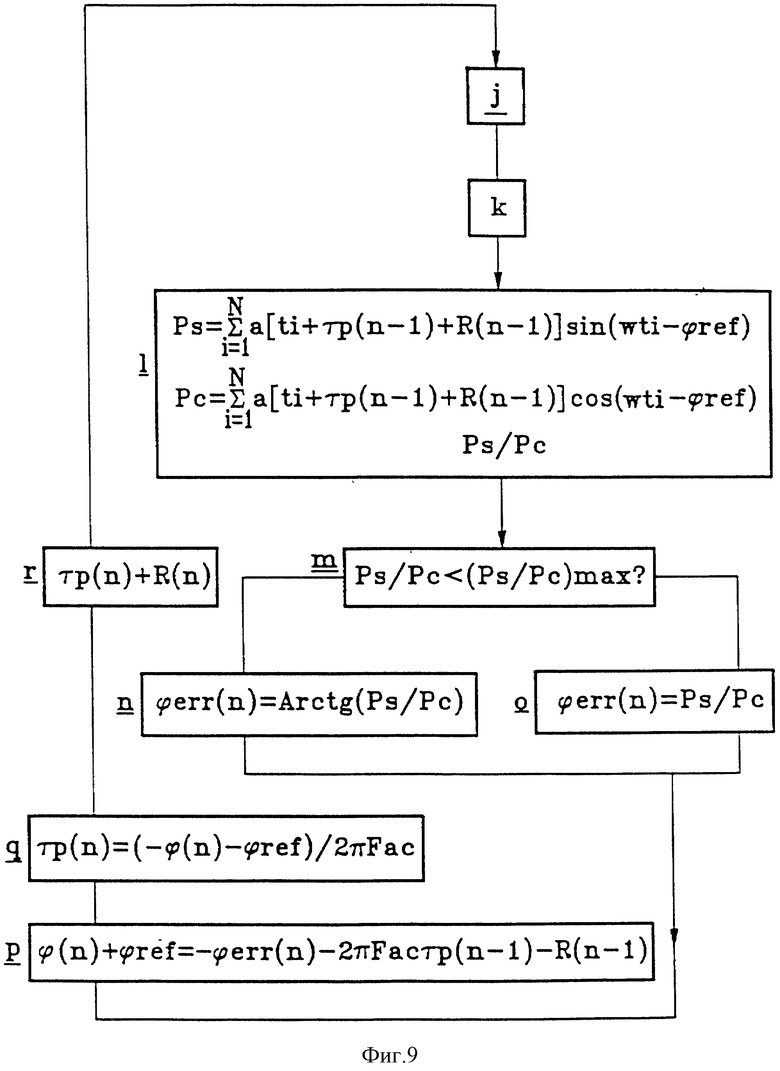
- фиг. 9 изображает другой вариант блок-схемы программы, представленной на фиг.2;
- фиг.10 изображает кривую, представляющую акустический сигнал и различные точки дискретизации, полученные путем добавления на каждой n-й итерации дополнительной задержки R(n) к программно-управляемой задержке τp(n), изображенной на фиг.2 (двенадцать итераций во всех);
- фиг. 11 изображает для каждой из итераций, представленной на фиг.10, кривую, представляющую погрешность Е фазы, обусловленную обратной сверткой гармоник (гармонических линий) после дискретизации в соответствии с добавленной программно-управляемой задержкой τp(n)+R(n).
На фиг.1 изображена блок-схема программы, представляющая различные шаги способа измерения расхода текучей среды, например газа, протекании по трубопроводу между двумя точками, пространственно разнесенными в направлении потока этой текучей среды согласно одному варианту осуществления изобретения.
Шаги способа обозначены на фиг.1 буквами от а до i. Когда газ протекает по трубопроводу между двумя ультразвуковыми преобразователями, пространственно разнесенными в направлении потока на расстояние L, то расход газа в трубопроводе описывается следующим выражением:
Q = (SL/4πFac)(2π[Fac(T2-T1)]+(ϕ2-ϕ1))/T1T2,
где S обозначает среднюю площадь внутреннего сечения трубопровода, свободную для потока между двумя точками, Т1 и Т2 обозначают времена прохождения акустических сигналов, передаваемых в направлениях соответственно по течению и против течения потока газа, ϕ2 и ϕ1 обозначают соответственно фазовые сдвиги акустических сигналов, возникающие вследствие распространения этих сигналов, a Fac обозначает частоту этих акустических сигналов.
Это выражение расхода соответствует отношению первого члена, а именно 2π[Fac(T2-T1]+(ϕ2-ϕ1), где скобки, [х], обозначают целую часть выражения х в скобках, ко второму члену Т1Т2, который равен произведению времен прохождения.
Первый член равен сумме первого слагаемого 2π[Fac(T2-T1)], которое определяет число целых периодов, укладывающихся в разности времен прохождения T2-T1, составляющей приблизительное измерение времени прохождения, и второго слагаемого (ϕ2-ϕ1), которое определяет разность фазовых сдвигов акустических сигналов, возникающих в каждом сигнале.
Учитывая тот факт, что Т1=L/(c-v) и Т2=L/(c+v), где с и v обозначают соответственно скорость распространения акустического сигнала и линейную скорость течения газа, и то, что скорость распространения главным образом зависит от температуры, которая незначительно изменяется во время измерений расхода, член Т1Т2 незначительно изменяется в зависимости от состава газа, и этот член, соответственно, пересчитывают реже, чем первый член.
Однако, когда рассчитывают второй член, измерение представленных в этом члене времен прохождения Т1 и Т2 выполняют способом, отличающимся от того, который используют для измерения времен прохождения, представленных в первом члене.
Действительно, поскольку в первом члене определяется только такая разность времен прохождения, то достаточно относительного измерения (при приблизительно постоянных) этих времен. Кроме того, точность, требуемая в этом случае, является низкой (приблизительно несколько микросекунд), поскольку важна только целая часть величины Fac(T2-Tl).
Наоборот, во втором члене имеет место абсолютное измерение времен прохождения, и, соответственно, точность, полученная для этого измерения, непосредственно влияет на точность измерения расхода (необходимо поэтому избегать временного сдвига, связанного с этим измерением).
Например, если искомая точность измерения расхода составляет 1%, то точность измерения времени прохождения должна быть близка к 0.5%, что соответствует погрешности менее 2 мкс относительно времен прохождения в газах и длин L между двумя обычными преобразователями (например, 150 мм для метана).
Таким образом, выражение расхода газа может быть записано следующим образом:
в котором время прохождения T1env и T2env измеряют методом огибающей, а время прохождения T1pz измеряют методом перехода через нулевой уровень, Т0 обозначает константу, которую следует исключить, чтобы получить время прохождения в газе. Далее эти два метода объясняются подробно.
Предпочтительнее использовать эти два различных метода измерения времен прохождения, чем проводить все измерения исключительно методом перехода через нулевой уровень, учитывая тот факт, что для проведения измерений по последнему методу требуется большее количество энергии, чем по методу огибающей.
На фиг. 1 шаг а описывает шаг, на котором ультразвуковой сигнал передается по течению из первого преобразователя ко второму, а время (T1pz-Т0) прохождения этого ультразвукового сигнала определяют методом перехода через нулевой уровень.
Точно так же ультразвуковой сигнал передается против течения, т.е. навстречу потоку, из второго преобразователя к первому, и время (T2pz-T0) прохождения этого сигнала определяют тем же способом, как и ранее.
На шаге b на основе вычисленных значений (T1pz-Т0) и (T2pz-T0) рассчитывают коэффициент, причем упомянутый коэффициент можно рассматривать как постоянный на протяжении некоторого числа "посылок" (коротких передач ультразвуковых сигналов), КТ=К/(T1pz-Т0)(T2pz-T0), где К=SL/4πFac.
К моменту передачи конечных посылок объемов газа V (n-2) уже вычислен, а расход Q(n-2) измерен. Если допустить, что расход не изменился после конечных посылок, то расход Q(n-l) равен расходу Q(n-2), а объем V(n-2)возрастает на приращение объема Q(n-l)Δt, где Δt - представляет время, прошедшее между двумя последовательными посылками в одном направлении, что дает приращение объема
V(n-1)=V(n-2)+Q(n-1)Δt.
Затем параметр nϕ, который представляет число измерений фазового сдвига, выполненных после последнего измерения времен прохождения (T1pz-Т0) и (T2pz-T0), обнуляют.
Шаг с заключается в ожидании на протяжении времени Δt до следующего шага.
Во время следующего шага d ультразвуковой сигнал передается по течению из первого преобразователя ко второму, а время прохождения T1env этого сигнала определяют методом огибающей, с последующим измерением фазового сдвига ультразвукового сигнала ϕ1, который появился в упомянутом сигнале вследствие его прохождения по потоку газа между двумя преобразователями.
Более подробно принцип измерения фазового сдвига будет описан далее.
Аналогично, ультразвуковой сигнал передается против течения из второго преобразователя к первому, и время прохождения T2env этого сигнала определяют с последующим измерением соответствующего фазового сдвига ϕ2, появившегося в упомянутом ультразвуковом сигнале.
После выполнения этого шага на шаге е выполняют проверку на равенство параметра по нулю. Если, как это описано для шага b nϕ=0, то есть если речь идет о первых измерениях фазового сдвига, выполняемых после последних измерений времен прохождения (T1pz-Т0) и (T2pz-T0), то тогда устанавливается параметр Tref= (T1env+T2env)/2, который представляет среднее время прохождения, соответствующее посылкам сигналов против течения и по течению соответственно (шаг f).
В противном случае, если nϕ≠0, то происходит переход к следующему шагу g, на котором на основе предшествующих измерений параметров T1env, ϕ1, T2evn, ϕ2 определяется первый член 2π[Fac(T2env-T1env)]+(ϕ2-ϕ1).
Далее расход Q(n) газа рассчитывают как произведение только что определенного первого члена на член КТ, определенный на шаге b. Затем объем газа, рассчитанный до настоящего момента, V(n-l), увеличивают на приращение объема Q(n)Δt, а именно V(n)=V(n-l)+Q(n)Δt.
Параметр Tenv устанавливается равным среднему значению от двух последних времен прохождения, измеренных при посылках против течения и по течению соответственно, т. е. Tenv=(T1env+T2env)/2, а nϕ - число измерений фазового сдвига, возрастает.
Шаг h состоит в ожидании на протяжении времени Δt перед следующим шагом.
Во время шага i проводится проверка каждого из двух параметров: nϕ и Tref, для того, чтобы узнать, во-первых, достигло ли число nϕ заданного максимального числа измерений фазового сдвига nϕmax, и, во-вторых, превысило ли значение |Tenv-Tref| заданный порог ΔТmах.
Второе условие устанавливают для того, чтобы проверить, подвергается ли среда распространения внезапной модификации, например, вследствие характеристик газа или изменения температуры.
Если ни одно из этих двух условий не выполняется, это означает, что порог nϕmах не достигнут и среда распространения внезапно не изменилась, и в этом случае снова осуществляются шаги от d до i. В противном случае, если, по крайней мере, одно из двух условий выполняется, то снова осуществляются шаги от а до i.
Далее принцип измерения фазового сдвига описывается со ссылкой на фиг.2, представляющую различные шаги способа измерения по настоящему изобретению, которые выполняются на шаге d фиг.1.
Чтобы измерить фазовый сдвиг, возникший в ультразвуковом сигнале вследствие его прохождения по потоку газа между двумя преобразователями, проводят последовательные итерации, и фиг.2 представляет одну из этих итераций, которая имеет место для каждой посылки ультразвукового сигнала, произведенной в заданном направлении прохождения. Последовательные итерации проводятся параллельно для двух направлений прохождения, но независимо для каждого направления.
Для 1-й итерации, когда посылку ультразвукового сигнала производят из одного преобразователя, например, по течению (шаг j), ультразвуковой сигнал, соответствующий измеряемому фазовому сдвигу, принимается другим преобразователем.
Во время шага k сбора данных сигнал одновременно дискретизируют с некоторой частотой дискретизации и преобразуют в цифровую форму.
Во время шага l, который соответствует первому шагу операции синхронного детектирования, дискретизированный и преобразованный в цифровую форму сигнал умножается на опорные сигналы, имеющие соответственно форму опорной синусоиды sin(wti-ϕref) и опорной косинусоиды cos(wti-ϕref), оба имеющие заданную фазу опорного сигнала ϕref.
Для N точек дискретизации, во время синхронного детектирования, выполняются следующие вычисления:
ps = Σa(ti)×sin(wti-ϕref)
pc = Σa(ti)×cos(wti-ϕref)
где a(ti) представляет значение, полученное в точке i дискретизированного сигнала.
После вычисления членов ps и pc и их отношения на шаге l проводится проверка значения, полученного для этого отношения, а именно является ли ps/pc меньше заданного порога, причем порог (ps/pc)max выбирают в соответствии с желаемой точностью измерения расхода (шаг m).
Если ps/pc>(ps/pc)max, тo это означает, что вычисление арктангенса отношения ps/pc, ϕerr(l), которое равно (ϕ1(1)-ϕref), где ϕ1(1) обозначает фазу дискретизированного ультразвукового сигнала, нельзя аппроксимировать как ps/pc (Arctg х = х). Тогда необходимо вычислить арктангенс (шаг n) для того, чтобы получить значение разности фаз между фазой дискретизированного сигнала и фазой опорного сигнала ϕerr(l)=Arct(ps/pc).
В противном случае, если ps/pc<(ps/pc)max, то может быть выполнена аппроксимация Arctg х = х и тогда значение разности фаз между фазой дискретизированного сигнала и фазой опорного сигнала задается выражением ϕerr(1)=ps/pc (шаг О).
Это означает в данном случае, что разность фаз между фазой дискретизированного сигнала и фазой опорного сигнала сходится к нулю с желаемой точностью, заданной порогом (ps/pc)max.
Следует напомнить, что когда шаги фиг.2 соответствуют первой итерации, возможно, что для определения фазы ϕеrr опорного сигнала понадобится вычисление арктангенса отношения ps/pc.
Во время первой итерации шаг р определяется выражением ϕ1(1)+ϕref = ϕerr(1).
Следующий шаг q определяет программно-управляемый фазовый сдвиг, выраженный в виде задержки τр(1), которая привязана к значению фазового сдвига ультразвукового сигнала, предварительно полученного посредством синхронного детектирования τp(1) = ϕerr(1)/2πFac.
Затем, в соответствии с шагом r, между шагом передачи и шагом синхронного детектирования вводится программно-управляемая задержка τp(l), для того чтобы, исходя из этой задержки, передать следующий ультразвуковой сигнал в том же самом направлении распространения.
Для n-й итерации ультразвуковой сигнал передают в том же самом направлении распространения, что и сигнал, переданный во время (n-1)-й итерации (шаг j), и затем ультразвуковой сигнал дискретизируют и преобразуют в цифровую форму (шаг k) перед синхронным детектированием (шаги от 1 до о).
На шаге l выполняются следующие операции (синхронное детектирование):
ps = Σa(ti+τp(n-1)×sin(wti-ϕref),
ps = Σa(ti+τp(n-1)×cos(wti-ϕref),
где τр(n-1) представляет программно-управляемую задержку, рассчитанную на предшествующей (n-1)-й итерации, и которую добавили к сигналу, обрабатываемому на текущей n-й итерации между шагом передачи этого сигнала и шагом синхронного детектирования.
В соответствии с шагами l и m, и как объяснялось ранее, рассчитывают отношения ps/pc и проводят сравнение значения этого отношения с пороговым значением (ps/pc)max.
В зависимости от результата сравнения (шаг o или n) выполняют расчет методом приближения (Arctg х = х) или
вычислением, посредством определения арктангенса, параметра ϕerr(n), который равен разности фаз между фазой дискретизированного во время n-й итерации сигнала и фазой опорного сигнала.
Значение фазового сдвига ϕ1(n)+ϕref ультразвукового сигнала, полученное синхронным детектированием во время n-й итерации, определяют на шаге р, суммируя значение разности фаз ϕerr(n) между фазой сигнала, дискретизированного во время n-й итерации и фазой опорного сигнала, и значение программно-управляемого фазового сдвига (n-1)-й итерации, 2πFacτp(n-1), а именно
ϕ1(n)+ϕref = -ϕref-2πFacτp(n-1).
В соответствии с полученным значением фазового сдвига ультразвукового сигнала получается новая программно-управляемая задержка τр(n), которая привязывается к этому значению:
и эта задержка вводится в следующий ультразвуковой сигнал между шагом передачи и шагом синхронного детектирования (шаг r) так, чтобы для (n+1)-й итерации шаг синхронного детектирования определял разность фаз ϕerr(n+1) между фазой сигнала, дискретизированного во время (n+1)-й итерации, и фазой опорного сигнала, которая близка к нулю настолько, насколько это возможно.
Когда разность фаз ϕerr(n+1) настолько близка к нулю, насколько это возможно, можно осуществлять аппроксимацию Arctg х = х и получается ϕerr(n+1)=ps/pc.
Это означает, что значение фазового сдвига ϕ1(n+1)+ϕref ультразвукового сигнала приблизительно равно программно-управляемому фазовому сдвигу 2πFасτр(n), добавляемому к ближайшему члену ps/pc во время n-й итерации.
Процесс последовательных приближений, используемый для измерения фазовых сдвигов ультразвуковых сигналов, изображен на фиг.2а, этот процесс преобразует зависящий от времени фазовый сдвиг и показывает таким образом, что двумя последовательными итерациями возможно выполнить условие, записанное на шаге m, фиг.2, при котором шаг n заменяется шагом о, таким образом устраняя вычисление арктангенса отношения ps/pc.
Фиг. 2b представляет цифровые значения фазового сдвига ультразвукового сигнала, представленного в качестве примера на фиг.2а, а параметр (Fac/Fq)360o представляет разрешение, обусловленное дискретизацией сигнала.
В этом примере разрешение 3.75o определяется тем фактом, что частота акустического сигнала Fac=40 кГц и Fq=3.84 мГц.
Таким образом, этот способ выгоден тем, что позволяет сократить время и объем вычислений и, следовательно, ограничивает потребление энергии.
Это особенно выгодно, когда измерение расхода текучей среды осуществляется счетчиком, работающим от батарей, выгода определяется тем фактом, что срок службы этих батарей увеличивается.
Пример электронной схемы 10, использованной для осуществления способа по настоящему изобретению, схематически изображен на фиг.3. На фиг.3 изображено, что электронную схему используют, во-первых, для электрического питания различных действующих блоков, которые будут описаны в дальнейшем, и, во-вторых, для управления способом измерения расхода газа в соответствии с настоящим изобретением.
Как показано на фиг.3, два ультразвуковых преобразователя 12, 14, действующих на частоте 40 кГц, располагают друг против друга в трубопроводе 16, по которому протекает газ.
Эти два преобразователя соединены с переключателем 18, который позволяет использовать каждый преобразователь поочередно в качестве излучателя и приемника.
К переключателю 18 присоединены два блока, передающий блок 20 и приемный блок 22. Передающий блок 20 включает в себя операционный усилитель и цифроаналоговый преобразователь.
Схема 10 включает в себя источник 24 электроэнергии и блок 26 управления электроэнергией, соединенный с переключателем и приемным блоком, и с микроконтроллером 28, который включает в себя кварцевый генератор 30, частота которого Fq составляет 3,84 МГц, арифметический и логический блок, контроллер последовательности команд, динамическую память ПАМ1 и ЗУПВ (запоминающее устройство с произвольной выборкой), статическую память ПАМ2 типа ПЗУ (постоянное запоминающее устройство) и несколько счетчиков от С1 до С3.
В памяти ПАМ2 содержатся различные команды, соответствующие шагам способа по настоящему изобретению, изображенным на фиг.1 и 2.
Приемный блок 22 включает в себя: усилитель 32, связанный с переключателем 18, и усиливающий электрический сигнал, соответствующий принятому ультразвуковому сигналу; аналого-цифровой преобразователь 34, который одновременно преобразует в цифровую форму и дискретизирует упомянутый сигнал; динамическую память ПАМЗ типа ЗУПВ, которая хранит дискретизированные значения; предварительно установленный 8-битовый счетчик 36, который управляет адресами записи в памяти ПАМЗ с постоянной частотой, задаваемой делителем частоты синхронизации, содержащимся в блоке 38 синхронизации, связанном с микроконтроллером 28. Этот блок 38 способен синхронизировать шаг дискретизации принятого сигнала.
Приемный блок 22, соединенный с выходом усилителя, также включает: схему 40 двухполупериодного выпрямителя, составленную из точечных диодов; фильтр 42 нижних частот, соединенный со схемой выпрямителя; пороговый компаратор 44, соединенный с упомянутым фильтром и с 16-битовым регистром 16 СО микроконтроллера.
Регистр С2, образующий часть микроконтроллера, предварительно устанавливают так, чтобы начать сбор данных о дискретизированных точках. 16-битовый счетчик С3 управляет блоком 38 синхронизации.
Этот счетчик С3 считает время, прошедшее с момента начала передачи ультразвукового сигнала одним из преобразователей 12, 14. Содержимое регистра С2 сравнивают со значением, полученным счетчиком С3 на протяжении каждого фронта синхросигнала.
Когда содержимое счетчика С3 достигает значения, содержащегося в регистре С2, блок 32 синхронизации генерирует сигнал на частоте дискретизации Fe, предназначенный для преобразователя 34.
Как объяснялось ранее со ссылкой на фиг.2, программно-управляемый фазовый сдвиг добавляется к каждому ультразвуковому сигналу, передаваемому от одного к другому ультразвуковому преобразователю. Этот фазовый сдвиг, выраженный в виде задержки, может добавляться к сигналу между шагом передачи сигнала и шагом синхронного детектирования, что делает этот способ чрезвычайно гибким в использовании.
Таким образом, можно вводить программно-управляемую задержку в принятый сигнал во время дискретизации этого сигнала. Фиг.4 иллюстрирует эту возможность.
Программно-управляемую задержку можно также добавлять в синусоидальный и косинусоидальный опорные сигналы, используемые во время синхронного детектирования. Этот вариант не показан на чертежах.
Также можно разбивать программно-управляемую задержку на две вспомогательные задержки, каждую из которых вводят в сигнал во время отдельного шага способа между шагом передачи сигнала и шагом синхронного детектирования.
Чтобы определить программно-управляемую вспомогательную задержку, которую нужно добавлять во время определенного шага способа, производят Евклидово деление программно-управляемой задержки, как функции модуля разрешающей способности программно-управляемого фазового регулятора, используемого в упомянутом шаге способа.
Таким образом, как показано на фиг.5, программно-управляемую задержку разбивают на две вспомогательные задержки, одну из которых вводят в сигнал дискретизации во время шага дискретизации, а другую вводят в синусоидальный и косинусоидальный опорные сигналы во время шага синхронного детектирования. Как показано на фиг.6, программно-управляемую задержку можно также вводить в сигнал передачи во время шага передачи.
Фиг. 7 также иллюстрирует другую возможность выполнения операции гетеродинирования принятого сигнала. Так, принимаемый сигнал смешивают со смесительным сигналом, к которому добавляют программно-управляемую задержку, чтобы получить смешанный сигнал, частота которого меньше частоты принятого сигнала.
Разбивая программно-управляемую задержку на две, а в действительности более чем на две программно-управляемые вспомогательные задержки, можно создавать большое число комбинаций между различными шагами, на которых вводят программно-управляемые вспомогательные задержки: дискретизация, синхронное детектирование, передача, гетеродинирование.
Далее будет описан вариант осуществления способа для измерения расхода газа по настоящему изобретению со ссылкой на фиг.1, 2, 3, 3а, 3b, 4 и 4а.
Как изображено на фиг.1, вслед за передачей двух ультразвуковых сигналов в противоположных направлениях на шаге а выполняют измерение соответствующих времен прохождения (T1pz-T0) и (T2pz-T0) каждого из этих сигналов методом перехода через нулевой уровень.
Команды для выполнения этих измерений содержатся в статической памяти ПАМ2 микроконтроллера 28.
Фиг.3а иллюстрирует способ измерения методом перехода через нулевой уровень, выполняемого с каждым принятым ультразвуковым сигналом. Принятый сигнал усиливают усилителем 32, представленным на фиг.3, а затем одновременно преобразуют в цифровую форму и дискретизируют в преобразователе 34. Дискретизация осуществляется на частоте Fe, равной 8 Fac, а именно 320 кГц.
Команды, содержащиеся в памяти ПАМ2, позволяют сравнивать значения амплитуд сигнала, полученные в точках дискретизации и хранимые в динамической памяти ПАМ3, с заданным значением, соответствующим порогу S, и среди значений амплитуд в точках дискретизации следующая первая точка А ищется такой, чтобы она имела большее значение амплитуды, чем пороговое значение.
От этой точки находят следующий переход через нулевой уровень соответствующей кривой ультразвукового сигнала. Для этого находят две последовательные точки дискретизации В и С, между которыми есть точка, в которой амплитуда кривой проходит через нулевое значение, и между точками В и С осуществляют прямолинейную интерполяцию с целью определения точки D, измеряя таким образом время прохождения через нулевой уровень (Tpz-T0).
Также можно находить конечный переход через нулевой уровень, характерный для кривой ультразвукового сигнала перед переходом упомянутой кривой через порог. Времена (T1pz-Т0) и (T2pz-T0) измеряют согласно этому способу (шаг а) и сохраняют в памяти ПАМ1 микроконтроллера, и, затем, как объяснялось ранее, выполняют шаги b и с, изображенные на фиг.1.
Во время шага b арифметический и логический блок микроконтроллера 28 выполняет расчеты, а значения КТ возросшего объема газа и параметр nϕ сохраняются в памяти ПАМ1.
Во время шага d осуществляют две последовательные посылки в противоположных направлениях на каждом ультразвуковом сигнале, переданном в одном направлении, и измеряют время прохождения Tenv упомянутого сигнала методом огибающей, а также измеряют соответствующую фазу ϕ ультразвукового сигнала. Фиг.3b иллюстрирует способ измерения методом огибающей.
Как показано на фиг.3b, когда ультразвуковой сигнал принимается одним из преобразователей, например преобразователем 12, упомянутый сигнал преобразуют в электрический сигнал и усиливают в усилителе 32, выпрямляют в схеме выпрямителя 40 и пропускают через фильтр 42 нижних частот так, чтобы сформировать огибающую принятого сигнала.
Диаграмма изображает форму сигнала после соответствующей операции, выполняемой над принятым электрическим сигналом.
Пороговый компаратор 44 используют для установления перехода кривой, представляющей огибающую принятого сигнала, через заданное пороговое значение, соответствующее регулируемому пороговому напряжению Vs.
Выходной сигнал компаратора 44 поступает на вход нагрузки 16-битового регистра СО. Регистр СО принимает содержимое счетчика С3, когда выход компаратора 44 изменяет состояние. Таким образом, регистр СО содержит данные о моменте, когда огибающая ультразвукового эхо-сигнала пересекает пороговый уровень напряжения Vs. Это значение затем позволяет определить времена прохождения T1env или T2env, представленные в формуле, выражающей расход газа, когда счетчик устанавливается в нулевое положение в начале передачи ультразвукового сигнала.
Фазовый сдвиг ультразвукового сигнала, возникающий в результате прохождения этого ультразвукового сигнала, определяют в соответствии с шагами, представленными на фиг. 2, со ссылкой на фиг.4 и 4а и устанавливают как часть n-й итерации способа по настоящему изобретению.
Таким образом, как изображено на фиг.4а, микроконтроллер генерирует сигнал передачи путем деления частоты Fq кварцевого генератора так, чтобы получить сигнал с частотой Fac=40 кГц, возбуждающий один из преобразователей. Другой преобразователь принимает сигнал, имеющий форму, изображенную в правой части диаграммы 1 фиг.4а.
Как изображено на фиг.4, когда сигнал Тх, исходящий из арифметического и логического блока микроконтроллера 28, проходит на преобразователь 12, синхросигнал с частотой Fq пропускается логическим элементом "И" и подается сначала на счетчик С3, а затем на счетчик С1 посредством блока 38 синхронизации, ограниченного пунктирными линиями.
Синхросигнал, который подается на счетчик С1, сначала посылается на счетчик D1 с делением частоты в 12 раз, который фактически сформирован из четырех триггерных схем (триггеров), последовательно делящих частоту Fq генератора на 3,2 и 2.
Выходной сигнал счетчика D1 подается на "схему совпадений", сформированную из нескольких логических элементов "И" и "ИЛИ", а также в счетчик D2 с делением частоты в два раза, образованный триггерной схемой.
Выходной сигнал из D2 затем посылается на счетчик С1, делящий частоту в 4 раза, таким образом позволяя получить частоту Fq/96 на выходе упомянутого счетчика С1 и затем подается на один из входов логического элемента "И".
4-битовый счетчик С4, находящийся вне микроконтроллера 28, соединен с другим входом этого логического элемента и с счетчиком С1. Счетчик С4 предварительно устанавливают на заданное значение, которое соответствует желаемому числу периодов возбуждающего сигнала, например 8, и логический элемент "И" пропускает возбуждающий сигнал с частотой Fq/96 (=40 кГц), пока счетчик С4 не закончит обратный счет.
Когда счетчик С4 возвращается к нулю, возбуждающий сигнал блокируется.
Когда сигнал Тх имеет значение 1, то приводится в действие счетчик С3.
Регистр С2 предварительно устанавливают на заданное значение, соответствующее оценке времени прохождения ультразвукового сигнала между двумя преобразователями. Счетчик С3 производит счет на частоте Fq тактовых импульсов с момента его включения и до достижения заданного значения регистра (диаграмма 2 фиг.4а). Декодер (не показан) непрерывно сравнивает значение, достигнутое счетчиком С3 со значением, содержащимся в регистре С2.
Это значение регистра С2 фактически является программно-управляемой задержкой τр(n-1), которая определяется во время предшествующей (n-1)-й итерации настоящего способа и которая добавляется к сигналу дискретизации (фиг. 4).
В то же время, в процессе счета счетчиком С3, один из преобразователей возбуждается возбуждающим сигналом с частотой Fq/96 и генерирует ультразвуковой сигнал, который проходит в газе и достигает другого преобразователя, при этом он приобретает фазовый сдвиг ϕ.
В момент, когда счетчик С3 достигает программно-управляемого значения τp(n-1)регистра С2 и сигнал CY переходит в состояние 1, блоки делителя D1, D2 повторно устанавливаются на нуль и пропускается сигнал дискретизации с частотой Fe.
Этот сигнал имеет частоту, равную Fq/24, когда выходной сигнал Tzc микроконтроллера 28 находится в нулевом состоянии.
Наоборот, при измерении времен прохождения методом перехода через нулевой уровень сигнал Tzc находится в состоянии 1 и сигнал на выходе логического элемента "ИЛИ" имеет частоту, равную Fq/12/.
Сигнал с частотой Fe, выходящий из блока синхронизации 38, поступает на вход логического элемента "И", другой вход которого принимает сигнал CY, выходящий из счетчика С3. Когда сигнал CY переходит в состояние 1, сигнал с частотой Fe подается на счетчик 36 в логический инвертор 50, сигнал с которого подается на преобразователь 34.
На фронте сигнала дискретизации выполняется преобразование электрического сигнала, соответствующего принятому ультразвуковому сигналу, сразу после его обработки блоком 32, и значения дискретизированного и преобразованного сигнала записываются в памяти ПАМЗ по адресу, содержащемуся в счетчике 36.
На спаде сигнала дискретизации адрес регистрации, содержащийся в счетчике 36, возрастает на 1.
Когда все адреса счетчика 36 оказываются заполненными, процедура дискретизации останавливается вследствие выдачи сигнала, который приводит сигнал Тх в нулевое состояние.
Следует отметить, что определение времени прохождения Tenv выполняется в то же самое время, что и преобразование и дискретизация принятого сигнала.
Частоту дискретизации выбирают равной 4Fac, чтобы снизить потребление энергии.
Значения синусоидальных и косинусоидальных опорных сигналов, хранимые в статической памяти ПАМ2, равны -1, 0, +1, 0, -1, 0, +1,... благодаря выбору частоты дискретизации Fe.
Следовательно, во время вычислений, выполняемых на шаге l, вычисление параметров ps и рс фактически упрощается до простого сложения, таким образом сокращая объем вычислений и, соответственно, потребление энергии.
В блоке 46 синхронного детектирования, символически представленном на фиг. 4, шаг m, представленный фиг.2, выполняют так, чтобы знать значение отношения ps/pc и сравнивать его с пороговым значением (ps/pc).
Затем выполняют вычисление параметра ϕerr(n), который представляет разность фаз между фазой дискретизированного во время n-й итерации сигнала и фазой опорного сигнала (шаги n или о фиг.2). На основе этого значения арифметический и логический блоки микроконтроллера вычисляют программно-управляемую задержку τp(n), которая должна быть записана в регистре С2 (шаги p, q, r), так, чтобы установить этот регистр на значение τp(n) (период обратного счета).
Эта задержка не равна точно отношению (-ϕ(n)-ϕerr1)/2πFac, поскольку она учитывает разрешение программно-управляемой задержки.
Во время следующей передачи ультразвукового сигнала ((n+1)-я итерация), осуществляемой в том же направлении прохождения, что и передача, соответствующая n-й итерации, описанной ранее, программно-управляемая задержка τр(n), которая была определена, должна быть записана в регистре С2 так, чтобы шаг синхронного детектирования, выполняемый во время (n+1)-й итерации, определял разность фаз ϕerr(n+1) между фазой дискретизированного во время этой итерации сигнала и фазой опорного сигнала, которая ниже порога (ps/pc)max.
Когда это условие выполняется, разность фаз ϕerr(n+l) равна ps/pc и нет необходимости вычислять арктангенс отношения ps/pc.
Фазовый сдвиг ультразвукового сигнала тогда равен программно-управляемому фазовому сдвигу n-й итерации, а параметр 2πFacτp(n) равен ближайшему члену ϕerr(n+l) (этот член чрезвычайно мал при условии приближения Arctg х= х).
Фиг. 5 представляет первый вариант осуществления изобретения. В этом варианте, ход различных процедур остается неизменным по сравнению с тем, что был описан ранее со ссылкой на фиг.2, 4 и 4а, за исключением шага синхронного детектирования и шага определения вводимой программно-управляемой задержки.
Фактически, если имеет место n-я итерация, когда разность фаз ϕerr(n) становится компонентом фазы сигнала, дискретизированного во время этой итерации, и фазы опорного сигнала, предварительно определенной либо вычислением арктангенса (шаг n), либо приближением (шаг о), тогда программно-управляемая задержка τр(n), полученная вычислением на шагах р и q, разбивается на две программно-управляемые вспомогательные задержки τер(n) и τrp(n).
Эти две вспомогательные задержки соответственно добавляются в регистр С2 для дискретизации и к таблице хранимых в статической памяти ПАМ2 значений +1, 0, -1, 0, +1..., соответствующих синусоидальному и косинусоидальному опорному сигналу.
Каждая из этих вспомогательных задержек определяется, во-первых, выполнением операции Евклидова деления модуля программно-управляемой задержки τp(n) и, во-вторых, разрешением программно-управляемой задержки.
Таким образом, программно-управляемая вспомогательная задержка τер(n), помещенная в регистр С2, равна m(Fac/Fq)360o/2πFac, где (Fac/Fq)360o представляет разрешение программно-управляемой задержки.
Аналогично, программно-управляемая вспомогательная задержка τrp(n), добавляемая к значениям синусоидального и косинусоидального опорных сигналов, равна k(Fac/Fe)360o, где (Fac/Fe)360o представляет разрешение, обусловленное дискретизацией.
Например, если значение фазового сдвига ультразвукового сигнала, полученное на шаге р (фиг.2) настоящего способа, составляет 194o, то можно разбить его следующим образом:
194o=m(Fac/Fq)360o+k(Fac/Fe)360o.
Если взять частоту дискретизации Fe=4Fac, а частоту акустического сигнала Fac=Fq/96, то получится следующее:
194o=m•3.75o+k•90o,
а именно, фактически: 194o=3•3.75o+2•90o+2.75o, где последний член 2.75o - остаток, составляющий погрешность отклонения фазы.
Также в регистр С2 можно вводить постоянную оценку времени прохождения акустического сигнала, к которой добавляется задержка τep(n) = 3×3.75°/2πFac, а именно τер(n)=3/Fq, которая соответствует фронтам трех тактовых импульсов на частоте Fq и значениям синусоидального и косинусоидального опорных сигналов, и задержка τrp(n) = 2×90°/2πFac, а именно τrр(n)=2/Fq, соответствующая двум фронтам тактовых импульсов дискретизации.
Фиг. 6 и 6а представляют второй вариант осуществления изобретения. Со ссылкой на эти фигуры будут описаны только те шаги способа, которые позволяют определять фазовый сдвиг ультразвукового сигнала.
Как показано на фиг.6 и 6а, для n-й итерации способа сигнал, передаваемый для возбуждения преобразователя, чтобы генерировать ультразвуковой сигнал передачи, формируется в микроконтроллере 28 счетчиком С1 делителя частоты, который частоту Fq генератора 30 тактовых импульсов делит на 96, чтобы получить ультразвуковой сигнал передачи с частотой Fac=40 кГц.
Этот передаваемый сигнал генерируют из синхросигнала с частотой Fq, который отправляют на вход первого логического элемента "И", причем на другой вход поступает сигнал Тх, выходящий из арифметического и логического блока микроконтроллера 28.
Выход этого логического элемента соединен с входом второго логического элемента "И", выход которого соединен с блоком делителя D1 частоты, который был уже описан со ссылкой на фиг.4.
Выход первого логического элемента также соединен, во-первых, с счетчиком С5, связанным с регистром С6, и, во-вторых, с счетчиком С3, связанным с регистром С2.
Когда сигнал Тх переходит в состояние 1, включается счетчик С5.
Регистр С6 предварительно устанавливают на заданное значение, которое соответствует программно-управляемой задержке τр(n-1), определенной во время предшествующей (n-1)-й итерации.
Как только включается счетчик С5, он считает число фронтов тактовых импульсов (диаграмма 1 фиг. 6а) до тех пор, пока оно не достигнет числа Fqτp(n-l), равного, например, 10.
Это число фронтов тактовых импульсов соответствует фазовому сдвигу, равному 10•(Fac/Fq)•2π, а именно 37.5o.
Декодер непрерывно сравнивает значение, достигнутое счетчиком С5, и значение, содержащееся в регистре С6. Когда это число достигнуто, сигнал CY5 переходит в состояние 1 (диаграмма 2 фиг.6а) и синхросигнал с частотой Fq пропускается.
Аналогично способу, описанному со ссылкой на фиг.4, генерируется передаваемый сигнал с частотой Fac=Fq/96, a именно Fac=40 кГц, который возбуждает один из преобразователей.
После возбуждения одного из преобразователей ультразвуковой сигнал последовательно передается из этого преобразователя в другой, принимается последним, и преобразуется в электрический сигнал, который усиливается перед дискретизацией с одновременным преобразованием в цифровую форму в аналого-цифровом преобразователе 34.
Одновременно с переходом сигнала Тх в состояние 1 счетчик С3 считает до достижения установленного значения, содержащегося в регистре С2. Это установленное значение определяют в соответствии с оценкой времени прохождения ультразвукового сигнала.
Когда достигается значение, содержащееся в регистре С2, сигнал СУ3 переходит в состояние 1, сбрасывает на нуль блоки делителей D1 и D2 для того, чтобы избавиться от неопределенности фазы, связанной с программно-управляемой задержкой, вводимой на шаге передачи, и пропускает сигнал дискретизации с частотой Fe, как уже было описано со ссылкой на фиг.4.
Счетчик 36, расположенный вне микроконтроллера 28, генерирует адреса записи в динамической памяти ПАМЗ для того, чтобы хранить по ним значения дискретизированного сигнала.
Все следующие шаги, связанные с синхронным детектированием, уже описаны со ссылкой на фиг.2 и 4 и остаются неизменными, кроме программно-управляемой задержки, которая записывается в регистре С6 и используется на шаге передачи вместо шага дискретизации.
Третий вариант, представленный на фиг.7, предпочтителен, если желательно уменьшить объем вычислений и, таким образом, сократить потребление энергии при выполнении настоящего способа. Согласно этому варианту сигнал передачи возбуждает один из преобразователей, который генерирует ультразвуковой сигнал в направлении другого преобразователя. Сигнал, связанный с фазовым сдвигом ультразвукового сигнала, который требуется определить, принимается другим преобразователем, преобразуется в электрический сигнал и усиливается.
Во время n-й итерации счетчик С7 делителя частоты, расположенный вне микроконтроллера, предварительно устанавливают в соответствии с программно-управляемой задержкой τp(n-1), которая определена во время предшествующей итерации.
Когда заканчивается период обратного счета, счетчик выдает прямоугольный сигнал смешения, имеющий частоту Fq/98, близкую к частоте Fac (например, 39 кГц), полученную делением частоты Fq тактовых импульсов.
Сигнал смешения и усиленный электрический сигнал, полученный из ультразвукового сигнала, вводятся в транзисторный смеситель 52, собранный по типу мостовой схемы.
После гетеродинирования полученный смешанный сигнал имеет частоту, сниженную до 1 кГц, и поступает на фильтр 54 нижних частот для устранения двойной частоты на (40+39) кГц, а именно 79 кГц.
Подобно тому, как описано со ссылкой на фиг.6, в конце заданного установленного времени, выбранного согласно оценке времени прохождения ультразвукового сигнала, посылается сигнал дискретизации и происходит дискретизация гетеродинированного отфильтрованного сигнала на частоте Fe, равной, например, 4 кГц.
Затем выполняют шаги синхронного детектирования на сохраненных значениях дискретизированного сигнала, в соответствии с шагами фиг.2.
Затем определяют программно-управляемую задержку τр(n), которая соответствует разности фаз ϕerr(n) между фазой сигнала, дискретизированного во время n-й итерации, и фазой опорного сигнала, и которая будет добавлена к счетчику С7 делителя частоты на следующей (n+1)-й итерации для передачи ультразвукового сигнала в том же направлении распространения.
Чтобы снизить потребление энергии при реализации способа по настоящему изобретению с произвольной конкретной частотой дискретизации, частоту дискретизации Fe устанавливают равной 4Fac.
При такой частоте значения синусоидального и косинусоидального опорных сигналов, хранимые в статической памяти ПАМ2, должны быть следующими: + 1, 0, -1, 0, +1,..., что позволяет избавиться от операций умножения на шаге l синхронного детектирования (фиг.2).
Это иллюстрируется верхней кривой на фиг.8, на которой точки представляют значения синусоидального и косинусоидального опорных сигналов, в случае, когда дискретизацию выполняют на частоте 4Fac.
Устанавливая частоту Fe дискретизации равной значению 4Fac/2n+1, где n не равно нулю (суб-дискретизацию), сохраняют значения +1, 0, -1, 0, +1 и получают сниженное потребление энергии.
Эта частота дискретизации может использоваться в вариантах осуществления, представленных на фиг.4, 5 и 6.
Для частоты Fe равной 4Fac/3, (n=1), получают значения синусоидального и косинусоидального опорных сигналов, представленные точками нижней кривой фиг.8.
Однако частота дискретизации ограничена, что означает, что 2n+1 не может принимать любое значение.
Фактически, в частотном спектре дискретизированного сигнала, если расстояние между двумя последовательными линиями дискретизированного сигнала меньше ширины полосы сигнала, то вносится ошибка в фазовые измерения обратной сверткой спектра.
В результате, частота дискретизации Fe не может принимать значение, из-за которого ширина полосы сигнала превышает расстояние между двумя последовательными линиями дискретизированного сигнала.
Таким образом, например, если ультразвуковой сигнал имеет частоту 100 кГц и ширину полосы 10 кГц, то разность 2Fac/2n+l между двумя последовательными линиями должна быть больше 10 кГц, что устанавливает предел 2n+1<20.
Частота Fe, следовательно, составляет более 20 кГц.
Следует отметить, что использование частоты дискретизации Fe, равной 4Fac/2n+l, где n≠0, с целью сокращения потребления энергии, также применимо к известному способу ультразвукового измерения расхода текучей среды, в котором фазовый сдвиг акустического сигнала определяют синхронным детектированием, без введения программно-управляемого фазового сдвига.
Другой вариант осуществления представлен на фиг.9-11. Этот вариант полезен, когда дискретизированный акустический сигнал содержит энергию, полученную из паразитных гармонических линий на частотах Fp, таких как Fp±Kfe=Fac за счет свертки спектра.
Это может иметь место, когда усилитель 32, показанный на фиг. 3, 4, 5, 6 и 7, запитывают относительно низкими напряжениями, приблизительно 3В, и наблюдается явление гармонического искажения, которое вызывает появление паразитных линий.
Следующее объяснение позволит лучше понять влияние этих паразитных линий на измерение расхода текучей среды.
Если предположить, что принятый акустический сигнал представляет собой синусоиду на частоте 40 кГц, что усиленный акустический сигнал содержит паразитную линию на частоте 120 кГц с амплитудой Ар и что фазы двух сигналов равны между собой и равны нулю, то упомянутый акустический сигнал можно записать следующим образом:
Y = cos(2πt/Tac)+Ap cos(6πt/Tac),
где Тас - период акустического сигнала (Тас=25 мкс).
Если частота дискретизации равна 160 кГц, то значения сигнала Y, которые дискретизируют в течение одного периода, равны
Y1 = cos(2πτp(n-1)/Tac)+Ap cos(6πτp(n-1)/Tac),
Y2 = -sin(2πτp(n-1)/Tac)+Ap sin(6πτp(n-1)/Tac),
Y3 = -cos(2πτp(n-1)/Tac)+Ap cos(6πτp(n-1)/Tac),
Y4 = +sin(2πτp(n-1)/Tac)+Ap sin(6πτp(n-1)/Tac),
где τp(n-l) обозначает программно-управляемую задержку, определенную во время (n-1)-й итерации со ссылкой на фиг.2.
Шаг синхронного детектирования l фиг.2 дает значения
Ps = -2sin(2πτp(n-1)/Tac)+Ap sin(6πτp(n-1)/Tac),
Pc = 2cos(2πτp(n-1)/Tac)+Ap cos(6πτp(n-1)/Tac).
В соответствии с шагом n разность фаз между фазой дискретизированного и фазой опорного сигналов задается выражением
ϕerr(n)=Arctg(Ps/Pc).
Предполагая, что амплитуда Ар незначительна, ϕerr(n) можно записать следующим образом:
Выполняя определенное преобразование функции арктангенса относительно значения -tg(2πτp(n-1)/Tac), имеем
а именно
err(n) = -(2πτp(n-1)/Tac)-Ap sin(8πτp(n-1)/Tac).
Ошибка, возникающая из-за присутствия паразитной линии на частоте 120 кГц, находится во втором члене последнего выражения ϕerr(n), который является синусоидальной функцией периода, равного Тас/4 (фиг.11).
Для амплитуды паразитной линии Ар, равной 0.01, ошибка может достигать максимального значения 0,57o(=0,01•180o/π), что абсолютно недопустимо, когда для некоторых применений необходимо получить точность приблизительно 0.015o.
Поскольку закон распределения ошибки представляет собой периодическую функцию с нулевым средним значением, то от этой ошибки можно избавиться путем усреднения некоторого количества акустических посылок, выполняемого следующим образом: в блок-схеме программы, представленной на фиг.9, шаг r модифицируют относительно блок-схемы программы, представленной на фиг.2 так, чтобы к программно-управляемой задержке τр(n), получаемой на предыдущем шаге q, добавлять дополнительную задержку R(n). Различные значения R(1), R(2)... варьируются от нуля до периода дискретизации Тас/4, когда частота дискретизации Fe равна четырем акустическим частотам Fac, что означает, что точки дискретизации выбирают, чтобы "плавно двигаться" по четверти синусоидальной кривой, соответствующей акустическому сигналу. Например, различные значения дополнительной задержки R(n) варьируются линейно, посредством шагов, составляющих Тас/(48), например, 0, Тас/(48), 2Тас/(48)... (фиг.10). Добавляя на каждой итерации задержку, равную Тас/48 (фиг.10), получают соответствующую фазовую ошибку Е, которая описывает синусоидальную кривую распределения с нулевым средним значением, как показано в расположении полученных точек на фиг.11.
В конце 12 посылок, по окончании периода дискретизации и периода Е кривой фазовой ошибки, члены, обусловленные присутствием паразитной линии на 120 кГц, исключаются при выполнении усреднения фаз. То же самое применяют для паразитных линий на других гармонических частотах; во время тринадцатой посылки значение R сбрасывают до 0 и процедуру повторяют.
Следует заметить, что различные значения дополнительной задержки R(n) должны распространяться, по меньшей мере, на один период дискретизации Тас/4.
Однако, когда частота дискретизации отличается от 4Fac, различные значения R(n) необходимо распространять, по меньшей мере, на один период дискретизации Тас/(Fe/Fac), и они равны долям периода Тас/(Fe/Fac), причем значения R(n) варьируют линейно шагами, равными Тас/(Fe/Fac).
Этот вариант применим ко всем вариантам осуществления настоящего изобретения и к вариантам, описанным ранее.











В соответствии с изобретением осуществляют измерение времен прохождения двух акустических сигналов, передаваемых в противоположных направлениях между двумя точками потока текучей среды, с измерением соответствующих фазовых сдвигов акустических сигналов, возникающих в каждом сигнале. Каждый принятый сигнал дискретизируют и преобразуют в цифровую форму и соответствующий фазовый сдвиг акустического сигнала определяют синхронным детектированием. В ходе последовательных итераций (приближений) для каждой итерации определяют такой программно-управляемый фазовый сдвиг, связанный со значением фазового сдвига акустического сигнала и полученный синхронным детектированием во время предшествующей итерации, при котором результат шага синхронного детектирования текущей итерации настолько близок к нулю, насколько это возможно, а фазовый сдвиг акустического сигнала приблизительно равен конечному программно-управляемому фазовому сдвигу. Изобретение обеспечивает снижение потребления энергии за счет сокращения объема вычислений. 23 з.п. ф-лы, 17 ил.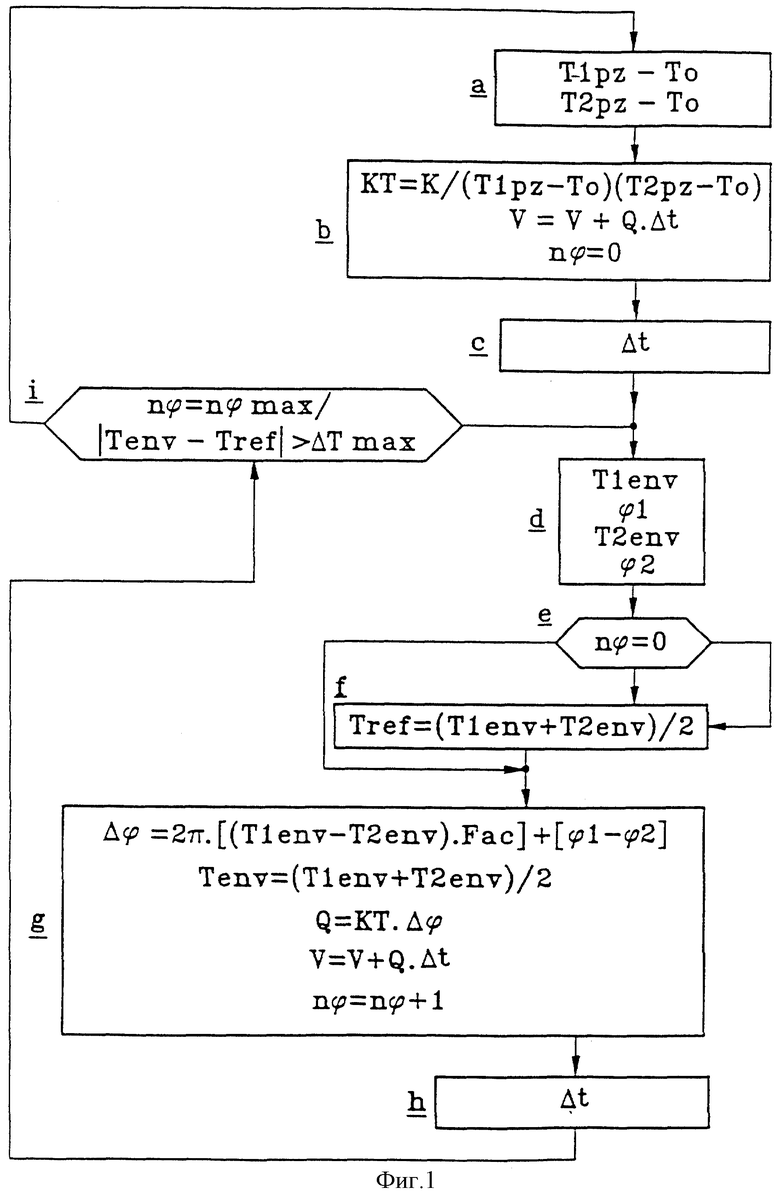
| БЛОКИНГ-ГЕНЕРАТОР | 1972 |
|
SU426309A1 |
| RU 2003944 C1, 30.11.1993 | |||
| Кузов транспортного средства | 1978 |
|
SU670477A2 |
