Изобретение относится к способам измерения расхода текучих сред, в частности с использованием времени прохождения двух акустических сигналов, передаваемых в противоположных направлениях между двумя точками потока текучей среды.
Известен способ определения расхода текучей среды, протекающей по трубопроводу, с использованием времени прохождения акустических сигналов, передаваемых между двумя акустическими преобразователями, расположенными в пространственно разделенных точках в направлении потока текучей среды (см. ЦНИИТЭнефтехим. Ультразвуковые расходы нефти и нефтепродуктов. М., 1970, с.10; Кремлевский П.П. Расходомеры и счетчики количества. Справочник. - Л.: Машиностроение, 1989, с.440-469; Справочник Измерения в промышленности, под ред. П.Профоса. М.: Металлургия, 1990, с.218-221).
Акустический сигнал передается из первого преобразователя во второй, принимается вторым преобразователем, после чего измеряют время прохождения Т1 этого акустического сигнала в направлении потока текучей среды. Точно также время прохождения Т2 акустического сигнала, передаваемого из второго преобразователя в первый преобразователь, измеряют после приема его первым преобразователем.
Расход Q текучей среды, проходящей по трубопроводу, определяют согласно выражению

 S - средняя площадь внутреннего сечения трубопровода, используемая для прохождения потока текучей среды между двумя акустическими преобразователями;
S - средняя площадь внутреннего сечения трубопровода, используемая для прохождения потока текучей среды между двумя акустическими преобразователями;
L - расстояние между акустическими преобразователями;
Т1 - время прохождения сигнала, передаваемого из первого преобразователя и принимаемого во втором преобразователе;
Т2 - время прохождения сигнала, передаваемого из второго преобразователя и принимаемого в первом преобразователе.
Недостатком данного способа является низкая точность измерения времени прохождения сигнала из-за случайных изменений амплитуды сигнала, связанных с нестабильностью параметров потока текучей среды, вызываемых турбулентностью, и искажений формы сигнала, связанных с ограниченной полосой пропускаемых частот акустического тракта при прохождении сигнала через текучую среду, а также высокого уровня шумов в принимаемом сигнале.
Известны способы измерения расхода текучей среды, в которых определяют не только время прохождения двух акустических сигналов по направлению и против направления движения текучей среды, но и измеряют фазовые сдвиги, возникающие в каждом из этих сигналов в результате прохождения каждого из упомянутых акустических сигналов по потоку, что повышает точность измерения.
Наиболее близким по технической сущности к заявляемому способу является способ акустического измерения расхода текучих сред, взятый за прототип, включающий определение величины расхода текучей среды путем формирования синхронизированных по фазе опорного и акустического сигналов, фильтрацию сигналов, последующую их дискретизацию и преобразование дискретизированных сигналов в цифровую форму с получением отсчетов дискретизации, определение времен прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, и фазовых сдвигов, соответственно возникающих в каждом акустическом сигнале в результате прохождения акустического сигнала по потоку (см. европейскую заявку ЕР №0426309, G01F 1/708, дата подачи заявки - 08.10.1990, дата приоритета - 31.10.1989, GB, опубл. 08.05.1991, «Измерительная система для измерения времени прохождения сигнала между двумя пространственно разнесенными точками»).
Расход Q текучей среды, протекающей по трубопроводу, вычисляют в данном способе с использованием следующего выражения:

где Т1 и Т2 - времена прохождения акустических сигналов, передаваемых соответственно по направлению и против направления течения потока текучей среды,
Fac - частота акустических сигналов, передаваемых по направлению и против направления движения потока,
φ1, φ2 - фазовые сдвиги, возникающие в каждом из акустических сигналов при их прохождении через текучую среду.
Первый член выражения 2π(Fac(Т2-Т1)] определяет число целых периодов, укладывающихся в разность между временами прохождения акустического сигнала. Квадратные скобки [х] обозначают целую часть выражения, находящегося в скобках.
Второй член выражения (φ1-φ11) определяет точный фазовый сдвиг, лежащий в пределах между -2π и 2π, который возникает в акустическом сигнале во время его прохождения через текучую среду между двумя преобразователями. Этот член выражения позволяет совершенствовать измерение и, таким образом, получать более точное измерение расхода текучей среды.
Величина Т1·Т2 - квадрат среднего времени прохождения акустических сигналов, передаваемых по направлению и против направления движения потока.
Учитывая, что Т1=L/(c-v) и Т2=L/(c+v), где с и v обозначают соответственно скорость прохождения акустического сигнала и линейную скорость текучей среды, притом, что скорость прохождения сигнала, главным образом, зависит от температуры, которая незначительно изменяется во время измерения расхода, а величина Т1·Т2 незначительно изменяется в зависимости от состава текучей среды, то величину Т1·Т2 не пересчитывают для каждого нового измерения.
В соответствии с указанной европейской заявкой измерение времени прохождения акустического сигнала выполняют путем инвертирования фазы характерной точки передаваемого сигнала и детектирования сигнала, принимаемого в момент, соответствующий этой инверсии. Это измерение, выполненное в направлениях против течения и по течению текучей среды, обеспечивает вычисление первого члена выражения 2π[Fac(Т2-Т1)].
После дискретизации принятого сигнала и преобразования упомянутого дискретизированного сигнала в цифровую форму осуществляют измерение фазового сдвига акустического сигнала путем синхронного детектирования этого сигнала, преобразованного в цифровую форму, что позволяет определить фазовый сдвиг φ1 или φ2, который интерпретируется как разность фаз между фазой дискретизированного сигнала и фазой опорного сигнала.
После определения фазовых сдвигов акустических сигналов, соответствующих направлениям по течению текучей среды φ1 и против ее течения φ2, согласно этому способу член выражения (φ2-φ1) определяют разностью между ними.
Складывая два члена выражения 2π[Fac(T2-Т1)] и (φ1-φ2), расход текучей среды определяют более точно, чем прежде.
Тем не менее точность измерения времени прохождения акустического сигнала в известном способе является недостаточной, так как измерение проводят только в одной точке принимаемого сигнала, называемой характерной точкой. Искажение формы принимаемого сигнала, зависящее от ширины полосы пропускания акустического тракта, наиболее сильно проявляется именно в момент инвертирования фазы в характерной точке. Такое искажение формы сигнала снижает точность определения момента времени, в который происходит инвертирование фазы принимаемого акустического сигнала, и, как следствие, снижает точность определения времени прохождения акустического сигнала через текучую среду.
Помимо этого принимаемый акустический сигнал перед подачей на фазовый детектор, в котором определяют момент инвертирования фазы в характерной точке, фильтруют в фильтре нижних частот на частоте акустического сигнала. Проводимая таким образом фильтрация не обеспечивает эффективного снижения уровня шумов в сигнале из-за широкой полосы фильтра и приводит к погрешности, величина которой превышает длительность одного периода акустического сигнала. Устранить в дальнейшем эту погрешность за счет поправки, получаемой при измерении фазового сдвига принимаемого сигнала, невозможно. Такая погрешность приводит к сбоям в определении времени прохождения акустического сигнала, что существенно затрудняет точное измерение расхода текучей среды.
В известной европейской заявке отфильтрованный сигнал, незначительно отличающийся по частоте от передаваемого акустического сигнала, дискретизируют с частотой, превышающей частоту обрабатываемого сигнала, в восемь раз. Поскольку всю последующую обработку сигнала выполняют на частоте акустического сигнала, то и дискретизацию, и преобразование дискретизированного сигнала в цифровую форму проводят на частоте, которая превышает частоту акустического сигнала в восемь раз, что значительно увеличивает объем цифровой обработки.
Кроме того, отсчеты дискретизации получают по длине акустического сигнала, равной только одному периоду, что снижает точность измерения времени прохождения акустического сигнала и достоверность полученных результатов.
Техническим результатом заявляемого изобретения является повышение точности измерения расхода текучей среды за счет повышения точности определения времени прохождения акустического сигнала по направлению и против направления движения текучей среды и снижения уровня шумов в сигнале, а также сокращение объемов цифровой обработки за счет преобразований акустического сигнала по частоте.
Указанный технический результат достигается тем, что в известном способе измерения расхода текучих сред между двумя точками, пространственно разнесенными в направлении потока текучей среды, включающем определение величины расхода текучей среды путем формирования синхронизированных по фазе опорного и передаваемого акустического сигналов, фильтрацию сигналов, последующую их дискретизацию и преобразование дискретизированных сигналов в цифровую форму с получением отсчетов дискретизации, определение времен прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, и фазовых сдвигов, соответственно возникающих в каждом акустическом сигнале в результате прохождения акустического сигнала по потоку, согласно изобретению передаваемый акустический сигнал формируют в виде двух гармонических составляющих с частотами, отношение суммы которых к их разности кратно четырем, а частоту опорного сигнала задают равной полусумме этих частот, при этом принимаемый сигнал, полученный после прохождения через текучую среду, дополнительно смешивают с опорным сигналом в двух смесителях, причем в одном смесителе сигнал смешивают с синусным опорным сигналом, а в другом смесителе - с косинусным опорным сигналом, для каждого преобразованного в смесителях сигнала проводят раздельную фильтрацию на частоте, равной полуразности частот двух гармонических составляющих, дискретизацию и преобразование дискретизированного сигнала в цифровую форму с получением отсчетов дискретизации, имеющих одинаковую фазу и многократно повторяющихся с периодичностью дискретизированного сигнала по всей его длине, при этом частота дискретизации и преобразования дискретизированного сигнала равна удвоенной разности частот двух гармонических составляющих акустического сигнала, полученные отсчеты дискретизации усредняют, после чего времена прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, определяют по значениям преобразованного в цифровую форму дискретизированного сигнала, имеющего большую амплитуду после фильтрации, а фазовые сдвиги, соответственно возникающие в каждом акустическом сигнале в результате прохождения акустического сигнала по потоку определяют по отношению амплитуд сигналов, полученных после их раздельной фильтрации.
Формирование передаваемого акустического сигнала в виде суммы двух гармонических составляющих с частотами, отношение суммы которых к их разности кратно четырем, и формирование опорного сигнала с частотой, равной полусумме частот двух гармонических составляющих, позволяет задать такие значения частот, при которых частотный спектр сигнала будет соответствовать полосе пропускания акустического тракта измерителя расхода текучей среды, что, в свою очередь, обеспечит минимальные искажения сигнала при его прохождении.
Достижение наиболее полного использования полосы пропускания акустического тракта при минимальных искажениях сигнала способствует повышению точности измерения времени прохождения сигнала, и, следовательно, повышению точности измерения расхода текучей среды.
Заданная кратность отношения суммы частот двух гармонических составляющих к их разности, равная четырем, является необходимым условием для объединения измерений времени прохождения акустических сигналов по потоку и фазовых сдвигов, соответственно возникающих при этом прохождении, то есть грубой и точной задержек, и позволяет сократить объем цифровой обработки.
Введенное в заявляемый способ дополнительное смешение, при котором принимаемый сигнал, полученный после прохождения через текучую среду, смешивают с одном смесителе с синусным опорным сигналом, а в другом смесителе - с косинусным опорным сигналом, позволяет преобразовать высокочастотный акустический сигнал в низкочастотный.
При этом спектр высокочастотного акустического сигнала при смешении переносится на нулевую частоту, что создает условия для последующего проведения наиболее оптимальной фильтрации в фильтрах нижних частот и снижает уровень шумов в обрабатываемом сигнале.
Кроме того, преобразование сигнала по частоте позволяет существенно снизить не только частоту дискретизации обрабатываемого сигнала, но и сократить объем цифровой обработки.
Фильтрация преобразованного по частоте сигнала позволяет осуществить оптимальное согласование частотной характеристики фильтра с частотным спектром обрабатываемого сигнала, что обусловливает наиболее эффективное подавление шумов.
Дискретизация сигнала и преобразование дискретизированного сигнала в цифровую форму с частотой, равной удвоенной разности частот двух гармонических составляющих акустического сигнала, не только упрощает цифровую обработку полученных результатов измерений, но и приводит к тому, что полученные отсчеты дискретизации следуют с интервалом, равным π/2. Благодаря такому соотношению частот в микропроцессоре происходит усреднение полученных при дискретизации отсчетов, имеющих одинаковую фазу и многократно повторяющихся с периодичностью дискретизированного сигнала по всей его длине, за счет чего повышается точность определения времени прохождения акустического сигнала через текучую среду.
Амплитуда преобразованных сигналов, полученных на выходе фильтров нижних частот, зависит от соотношения фаз принимаемого акустического и опорного сигналов. Так как в смесители поступают синусный и косинусный опорные сигналы, сдвинутые по фазе на угол, равный π/2, то на выходе фильтров нижних частот один из преобразованных сигналов будет иметь большую амплитуду. Известно, что у сигнала с большей амплитудой соотношение сигнал/шум больше, а значит и точность определения времени прохождения акустического сигнала выше. Поэтому для определения времени прохождения акустического сигнала через текучую среду выбирают сигнал с большей амплитудой.
Для определения разности фаз принятого акустического и опорного сигналов используют отношение амплитуд полученных на выходах фильтров нижних частот преобразованных сигналов, причем это отношение зависит только от разности фаз принятого и опорного сигналов и не зависит от амплитуды принятого акустического сигнала.
В связи с тем, что амплитуда принимаемого акустического сигнала при прохождении через текучую среду всегда подвергается случайным изменениям, независимость результата измерения разности фаз от амплитуды принимаемого сигнала является одним из преимуществ заявляемого способа, позволяющим повысить точность определения времени прохождения акустического сигнала по потоку, а следовательно, и точность измерения расхода текучей среды.
Технических решений, совпадающих с совокупностью существенных признаков заявляемого изобретения, не выявлено, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «новизна».
Заявляемые существенные признаки, предопределяющие получение указанного технического результата, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «изобретательский уровень».
Условие патентоспособности «промышленная применимость» подтверждено на примере конкретного выполнения заявляемого способа акустического измерения расхода текучей среды.
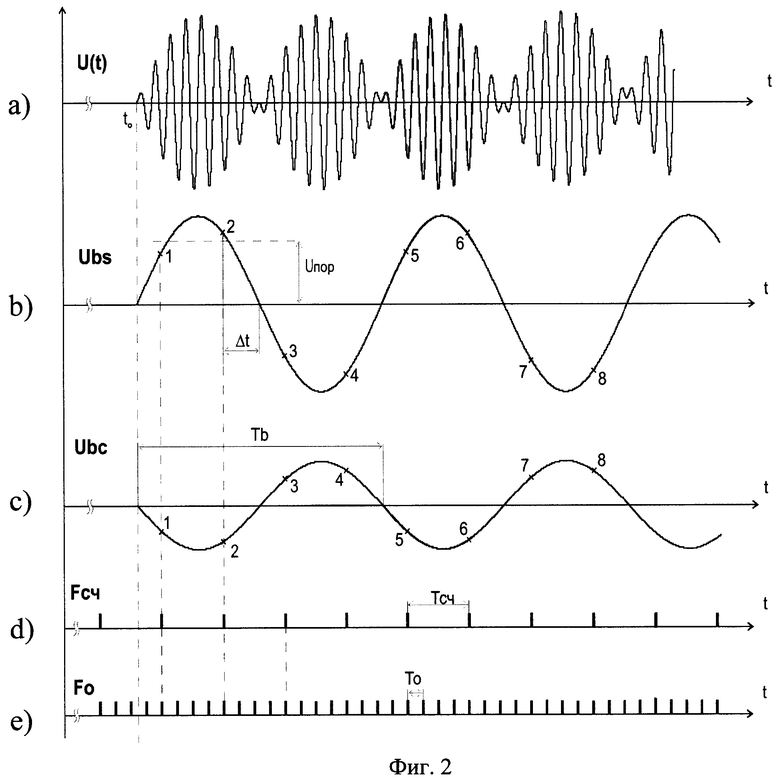
Заявляемый способ акустического измерения расхода текучих сред с использованием времени распространения акустического сигнала иллюстрируется фигурой 1, на которой представлена схема измерения времени прохождения акустического сигнала по направлению и против направления движения текучей среды для определения расхода текучей среды, и фигурами 2а, 2в, 2с, 2d и 2е, на которых изображены эпюры напряжений, соответствующие передаваемому акустическому сигналу (2а), полученные на выходе синусного и косинусного квадратурных каналов (2в и 2с соответственно), а также зависимость между частотой считывания Fсч (2d) и опорной частотой Fo (2е).
Схема измерения времени прохождения акустического сигнала по направлению и против направления движения текучей среды для определения расхода текучей среды, представленная на фиг.1, содержит задающий генератор 1, формирователь сигнала 2, микропроцессор 3, передатчик 4, переключатель приема-передачи 5, акустические преобразователи 6, 7, приемный усилитель 8, смесители 9, фильтры нижних частот 10, аналого-цифровые преобразователи 11.
Заявляемый способ акустического измерения расхода текучих сред осуществляется следующим образом.
В задающем генераторе 1 вырабатывают синусный и косинусный опорные сигналы с частотой Fo и две гармонические составляющие с частотами F1 и F2, при этом гармонические составляющие синхронизированы по фазе с опорным сигналом.
Передаваемый акустический сигнал U(t), состоящий из суммы двух гармонических составляющих с частотами F1 и F2, формируют в формирователе сигнала 2 в виде следующего выражения:

где U1, U2 - амплитуды гармонических составляющих с частотами F1и F2 соответственно;
t - текущее время.
При равенстве амплитуд двух гармонических составляющих U1=U2=Uo/2 выражение (3) преобразуется следующим образом:

Выражение (4) описывает балансно-модулированное колебание со средней частотой Fcp, равной полусумме частот двух гармонических составляющих, Fcp=(F1+F2)/2, частотой биений Fb, равной полуразности частот двух гармонических составляющих, Fb=(F2-F1)/2 и Uo - амплитудой балансно-модулированного колебания (см. фиг.2а).
Соотношение между частотами двух гармонических составляющих F1 и F2 выбирают, исходя из условий, обеспечивающих неискаженную передачу сигнала, при которых средняя частота балансно-модулированного колебания Fcp=(F1+F2)/2 соответствует средней частоте полосы пропускания акустического тракта, а частоты F1 и F2 находятся в пределах полосы пропускания сквозного акустического тракта.
Кроме того, для сокращения объемов цифровой обработки принимаемых сигналов задают следующие три условия:
- опорная частота Fo равна средней частоте Fcp, то есть Fo=Fcp, и, следовательно, равна полусумме частот двух гармонических составляющих (F1+F2)/2;
- зависимость между средней частотой Fcp, равной (F1+F2)/2, и частотой биений Fb, равной (F2-F1)/2, выражается следующей формулой:
Fcp=4 k Fb, где k=1, 2, 3..., то есть отношение суммы частот двух гармонических составляющих к их разности кратно четырем, (5);
- длительность передаваемого сигнала, которая составляет целое количество периодов частоты Fb, но не менее двух.
Сформированный сигнал по команде микропроцессора 3 подают в передатчик 4, в котором сигнал усиливается по мощности, и далее через переключатель приема-передачи 5, осуществляющего по команде микропроцессора 3 коммутацию акустических преобразователей 6 и 7, поступает в зависимости от заданного направления распространения акустического сигнала (по потоку или против потока текучей среды) на один из указанных акустических преобразователей 6 или 7.
Далее сигнал проходит через текучую среду, принимается акустическим преобразователем 7 или 6, усиливается в приемном усилителе 8 и поступает на два квадратурных канала, каждый из которых состоит из смесителя 9, фильтра нижних частот 10 и аналого-цифрового преобразователя 11 (см. фиг.1).
На выходе приемного усилителя 8 сигнал без учета временной задержки при распространении имеет вид (см. фиг.2а):

где Fb - частота биений, равная (F2-F1)/2;
Fo - опорная частота, равная (F2+F1)/2;
φ - фазовый сдвиг, возникающий при распространении акустического сигнала от передающего акустического преобразователя 6 или 7 до приемного акустического преобразователя 7 или 6.
В квадратурных каналах принимаемый сигнал сначала дополнительно смешивают с опорным сигналом, причем в один из смесителей 9 поступает синусный опорный сигнал, имеющий вид Uоп Sin 2πFo t, а в другой смеситель 9 поступает косинусный опорный сигнал, имеющий вид Uоп. Cos 2πFo t, где Uoп - амплитуда опорного сигнала.
В смесителях 9 происходит умножение принимаемого сигнала на опорный сигнал.
На выходе смесителя 9 с синусным опорным сигналом получают преобразованный сигнал следующего вида:

На выходе смесителя 9 с косинусным опорным сигналом получают сигнал следующего вида:

Преобразованные в смесителях 9 сигналы проходят через фильтры нижних частот 10, которые подавляют составляющие удвоенной средней частоты Sin(4πFot+φ) и выделяют низкочастотную составляющую сигнала биений.
На выходах фильтров нижних частот 10 получают сигналы биений, представляющие собой синусоидальные функции с частотой, равной частоте биений Fb, то есть равной полуразности частот двух гармонических составляющих, а именно


Эпюры напряжений Ubs и Ubc, полученные соответственно на выходе синусного и косинусного квадратурных каналов, изображенные на фиг.2b и 2с, представляют собой отрезки синусоид с частотой биений Fb и амплитудой, пропорциональной Cosφ для сигнала Ubs, и пропорциональной Sinφ для сигнала Ubc.
Отношение выражений (9) и (10) дает величину фазового сдвига φ

Таким образом, отношение значений сигналов биений на выходах фильтров нижних частот двух квадратурных каналов дает величину фазового сдвига, возникающего при прохождении сигнала от передающего акустического преобразователя 6 или 7 до приемного акустического преобразователя 7 или 6, на опорной частоте Fo.
Следует отметить, что в выражениях (9) и (10) составляющие амплитуды, равные 0,5UoUoп, одинаковы для сигналов Ubs и Ubc, следовательно, измерение фазового сдвига не зависит от случайных изменений амплитуды принимаемого акустического сигнала.
Определение времени прохождения акустического сигнала через текучую среду разбивают на два этапа: оценку грубой задержки, связанную со временем прохождения акустического сигнала через текучую среду и выполняемую с точностью до одного периода средней частоты сигнала, и оценку точной задержки, связанную с величиной фазового сдвига, возникающего при распространении акустического сигнала.
Для измерения грубой величины задержки принятого сигнала Тгр используют сигнал биений, полученный на выходе фильтра нижних частот, в котором амплитуда сигнала больше, так как в таком сигнале соотношение сигнал/шум выше, и, следовательно, выше точность определения времени прохождения сигнала через текучую среду (см. фиг.2b и 2с).
Оцифровку сигналов биений проводят после фильтрации в соответствующих аналого-цифровых преобразователях 11 с частотой считывания Fсч, которая удовлетворяет соотношению

то есть частота дискретизации и преобразования дискретизированного сигнала в цифровую форму равна удвоенной разности частот двух гармонических составляющих акустического сигнала.
С учетом выражения (5) получают следующую зависимость между частотой считывания Fсч и опорной частотой Fo

Импульсную последовательность частоты считывания Fсч синхронизируют с импульсной последовательностью опорной частоты Fo таким образом, чтобы на каждом периоде Тсч укладывалось k периодов То.
На фиг.2d и 2е представлена зависимость между частотой считывания Fсч и опорной частотой Fo, в которой k равен 4.
Оцифровку сигналов биений проводят во временном интервале, в котором ожидается появление принимаемого сигнала. Начало этого интервала определяют как минимально возможное время распространения сигнала через текучую среду, при этом считают, что скорость распространения акустического сигнала является максимально возможной в данных конкретных условиях, учитывающих состав текучей среды, температуру, скорость потока и расстояние между акустическими преобразователями 6 и 7.
Длительность временного интервала превышает длительность принимаемого сигнала на величину, определяемую диапазоном изменения скорости распространения акустического сигнала в текучей среде и диапазоном изменения скорости потока.
На протяжении указанного временного интервала выполняют оцифровку сигналов биений с частотой считывания Fсч, полученные результаты вводят в микропроцессор 3, который осуществляет всю дальнейшую обработку сигналов.
Решение о наличии сигнала принимают по превышению одним из отсчетов сигнала биений установленного в микропроцессоре порогового уровня Uпор (см. фиг.2b), величину которого задают равной половине максимально возможной амплитуды сигнала биений для обеспечения гарантированного превышения хотя бы одним из отсчетов этого порогового уровня.
Следует отметить, что с учетом соотношения (12) отсчеты сигнала биений следуют через фазовый угол, равный π/2 (см. фиг.2b и 2с), это означает, что отсчеты сигнала в точках 1 и 5 на фиг.2b и 2с равны между собой, а по модулю равны отсчетам в точках 3 и 7. Аналогичная ситуация наблюдается в точках 2 и 6, а также в точках 4 и 8 соответственно.
Данное свойство используют для усреднения значений отсчетов дискретизации и повышения точности измерений времени прохождения сигнала.
Величину задержки принятого сигнала определяют как время, прошедшее с момента передачи сигнала с одного акустического преобразователя, например 6, и до момента начала приема to этого сигнала другим акустическим преобразователем, например 7 (см. фиг.2а).
Для определения грубой величины задержки принятого сигнала Тгр вычисляют время первого после превышения порогового уровня перехода сигнала биений через ноль.
Переход через ноль происходит между отсчетами в точках 2 и 3 (см. фиг.2b).
Момент начала принимаемого сигнала to опережает точку перехода через ноль на величину, равную Tb/2=2k To, где
Tb - период сигнала биений, равный 1/Fb;
То - период опорной частоты, равный 1/Fo;
k=4.
Если допустить, что отсчет в точке 2 (см. фиг.2b) соответствует N-му импульсу последовательности опорной частоты Fo от момента начала передаваемого сигнала, то получают выражение

где N - количество импульсов последовательности опорной частоты Fo от момента начала передаваемого сигнала до отсчета сигнала биений в точке 2;
Δt - промежуток времени от момента отсчета в точке 2 до перехода сигнала биений через ноль.
Значения отсчетов сигнала биений в точках 2 и 3 (см. фиг.2b) связаны следующими соотношениями:
где:
U2 - значение отсчета сигнала биений в точке 2;
U3 - значение отсчета сигнала биений в точке 3.
Из выражения (15) следует, что

Аналогичное выражение получают и в том случае, когда сигнал биений начинается с отрицательной полуволны (см. фиг.2с).
С учетом выражений (14) и (16) получают формулу для определения величины грубой задержки

Для определения точной составляющей задержки сигнала Тточ. вычисляют фазовый сдвиг средней частоты принимаемого сигнала относительно опорной частоты Fo по формуле (11), при этом используют отсчеты сигналов биений двух квадратурных каналов. Перед вычислением точной составляющей Тточ отсчеты сигнала биений с одинаковой фазой усредняют аналогично тому, как это происходит при определении грубой величины задержки принятого сигнала Тгр, а затем величину точной составляющей задержки определяют по формуле

Функцию φ=arctg (Ubc/Ubs) в соответствии с выражением (11) однозначно определяют для углов в интервале от - π/2 до +π/2. Для вычисления данной функции в диапазоне углов от 0 до 2 π учитывают знаки отсчетов Ubc, Ubs в первой половине периода от начала сигналов биений.
Формулы для расчета фазового сдвига в зависимости от знаков отсчетов Ubc, Ubs имеют следующий вид:
Общую задержку сигнала Т, то есть время прохождения акустического сигнала через текучую среду, определяют путем суммирования грубой составляющей задержки сигнала Тгр, содержащей целое число периодов То опорной частоты Fo, и точной составляющей задержки сигнала Тточ

где [(2k/π)arctg(-U2/U3)] - член выражения, обозначающий его целую часть;
φ - фазовый сдвиг, который вычисляют в соответствии с формулами (18) и (19).
По формуле (20) вычисляют общую задержку сигнала при распространении по направлению потока текучей среды Т1 и против направления потока текучей среды Т2, а затем вычисляют расход текучей среды в соответствии с выражением (1).
Заявляемый способ акустического измерения расхода текучих сред позволяет значительно повысить точность определения времени прохождения акустических сигналов, снизить уровень шумов в обрабатываемом сигнале, а также уменьшить объем цифровой обработки полученных результатов измерений и может быть реализован в акустических расходомерах для жидких и газообразных сред, принцип работы которых основан на использовании времени прохождения двух акустических сигналов, передаваемых в противоположных направлениях между двумя точками потока текучей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 1996 |
|
RU2182315C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ВОЗБУЖДЕНИЯ ДЛЯ ДАТЧИКА ВИБРАЦИИ | 2014 |
|
RU2646541C2 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2015 |
|
RU2612749C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕКУЧЕЙ СРЕДЫ В ТРУБОПРОВОДЕ | 2021 |
|
RU2768295C1 |
| ЦИФРОВЫЕ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ ФАЗЫ ПРИНЯТОЙ РЕАЛИЗАЦИИ ГАРМОНИЧЕСКОГО ИЛИ КВАЗИГАРМОНИЧЕСКОГО СИГНАЛА | 2010 |
|
RU2463701C2 |
| АКУСТИЧЕСКИЙ ДЕТЕКТОР ТЕКУЧЕЙ СРЕДЫ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2014 |
|
RU2688883C2 |
| Способ передачи дискретных сообщений между подводными объектами | 2021 |
|
RU2758637C1 |
| Способ моноимпульсного измерения радиальной скорости объектов | 2022 |
|
RU2799002C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 2010 |
|
RU2453815C2 |
| КОМПЕНСАЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ РАЗНОСТИ ФАЗ СЛУЧАЙНЫХ СИГНАЛОВ | 2002 |
|
RU2227306C2 |
Для определения расхода формируют синхронизированные по фазе передаваемый акустический сигнал в виде двух гармонических составляющих с частотами, отношение суммы которых к их разности кратно четырем, и опорный акустический сигнал, частоту которого задают равной полусумме этих частот. Принимаемый сигнал, полученный после прохождения через текучую среду между двумя точками, пространственно разнесенными в направлении потока, смешивают в одном смесителе с синусным опорным сигналом, а в другом смесителе - с косинусным опорным сигналом. Для каждого преобразованного в смесителях сигнала проводят раздельную фильтрацию на частоте, равной полуразности частот двух гармонических составляющих, дискретизацию и преобразование дискретизированного сигнала в цифровую форму с получением отсчетов дискретизации, имеющих одинаковую фазу. Отсчеты дискретизации усредняют, после чего времена прохождения каждого из двух акустических сигналов, передаваемых в противоположных направлениях, определяют по значениям преобразованного в цифровую форму дискретизированного сигнала, имеющего большую амплитуду после фильтрации. Фазовые сдвиги, возникающие в каждом акустическом сигнале в результате прохождения по потоку, определяют по отношению амплитуд сигналов, полученных после их раздельной фильтрации. Изобретение повышает точность измерения расхода, сокращает объем цифровой обработки. 2 ил.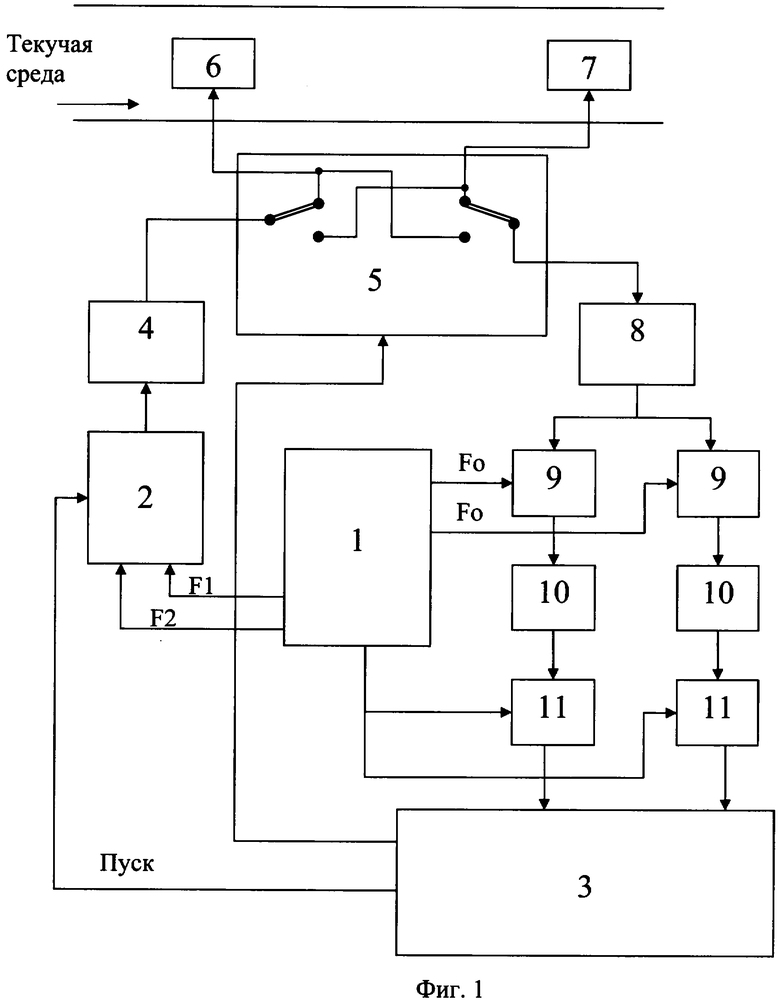
Способ акустического измерения расхода текучих сред между двумя точками, пространственно разнесенными в направлении потока текучей среды, включающий определение величины расхода текучей среды путем формирования синхронизированных по фазе опорного и передаваемого акустического сигналов, фильтрацию сигналов, последующую их дискретизацию и преобразование дискретизированных сигналов в цифровую форму с получением отсчетов дискретизации, определение времен прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, и фазовых сдвигов, соответственно возникающих в каждом акустическом сигнале в результате прохождения акустического сигнала по потоку, отличающийся тем, что передаваемый акустический сигнал формируют в виде двух гармонических составляющих с частотами, отношение суммы которых к их разности кратно четырем, частоту опорного сигнала задают равной полусумме этих частот, при этом принимаемый сигнал, полученный после прохождения через текучую среду, дополнительно смешивают с опорным сигналом в двух смесителях, причем в одном смесителе сигнал смешивают с синусным опорным сигналом, а в другом смесителе - с косинусным опорным сигналом, для каждого преобразованного в смесителях сигнала проводят раздельную фильтрацию на частоте, равной полуразности частот двух гармонических составляющих, дискретизацию и преобразование дискретизированного сигнала в цифровую форму с получением отсчетов дискретизации, имеющих одинаковую фазу и многократно повторяющихся с периодичностью дискретизированного сигнала по всей его длине, при этом частота дискретизации и преобразования дискретизированного сигнала равна удвоенной разности частот двух гармонических составляющих акустического сигнала, полученные отсчеты дискретизации усредняют, после чего время прохождения каждого из двух акустических сигналов, передаваемых между двумя точками в противоположных направлениях, определяют по значениям преобразованного в цифровую форму дискретизированного сигнала, имеющего большую амплитуду после фильтрации, а фазовые сдвиги, соответственно возникающие в каждом акустическом сигнале в результате прохождения акустического сигнала по потоку, определяют по отношению амплитуд сигналов, полученных после их раздельной фильтрации.
| БЛОКИНГ-ГЕНЕРАТОР | 1972 |
|
SU426309A1 |
| СПОСОБ АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 1996 |
|
RU2182315C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ПОТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2284015C2 |
| US 6012338 A, 11.01.2000. | |||

