Изобретение относится к области реабилитационной (восстановительной) медицины и может быть использовано в сочетании с рефлексотерапией, медикаментозным и ортопедохирургическим лечением больного с нарушениями двигательных функций, в частности для лечения детского церебрального паралича (ДЦП).
Известен способ стимуляции мышц и восстановления двигательных функций больного ребенка, например церебральным параличом /1/, заключающийся в реализации движений головы и туловища, рук и ног, пальцев рук и ног руками врача или медсестры в соответствии с методиками лечебной физкультуры. Этот способ является эффективным, но изнурительным для обслуживающего высококвалифицированного медперсонала.
Поэтому недостатком этого способа является необходимость иметь высококвалифицированный медперсонал. Вторым недостатком этого способа является отсутствие объективной информации о физиологическом состоянии такого больного, который не может реагировать на действия врача или медсестры. А при отсутствии информации о частоте пульса, частоте дыхания, давления крови и температуры тела лечащий врач или медсестра не всегда могут обеспечить оптимальный режим лечебной физкультуры для указанного больного, в частности для ребенка.
Известен способ биомеханической стимуляции мышц и восстановления двигательных функций взрослого человека, больного церебральным параличом /2/, заключающийся в установке головы, туловища и конечностей в начальное положение и в осуществлении программных движений этих частей тела в соответствии с методами лечебной физкультуры путем использования жестких механических тренажеров, управляемых по жесткой программе, при условии, что больной может подавать сигналы о физическом дискомфорте или сам включать и отключать тренажер при избыточных или неоптимальных физических нагрузках. Известно устройство, реализующее способ /2/, содержащее установленные на основании привод, устройство управления приводом, приспособления для крепления частей тела, взаимосвязанные с приводом через датчики реальных законов движения, процессор и источник электропневмопитания, при этом датчики реальных законов движения подключены ко входу процессора, выход процессора подключен ко входу устройства управления приводом, которое соединено с источником электропневмопитания.
Недостаток этого способа - применение его лишь для взрослого человека, а известно, что лечение церебрального паралича дает больший эффект выздоровления в период новорожденности и в грудном возрасте при условии правильной постановки диагноза.
Задачей предлагаемого способа является расширение функциональных возможностей способа биомеханической стимуляции мышц и повышение эффективности его для восстановления двигательных функций, а именно использование его для больных всех возрастов, начиная с новорожденных, за счет управления процессом стимуляции и формирования щадящей программы движения.
Поставленная задача решается тем, что в способе биомеханической стимуляции мышц и восстановления двигательных функций, при котором голову, туловище, конечности и пальцы пациента устанавливают в начальное положение и задают принудительное движение этих частей тела по программе - методике лечебной физкультуры, согласно изобретению, предварительно определяют индивидуальные для пациента предельно допустимые значения параметров физиологического состояния: частоту сердечных сокращений, частоту дыхания, кровяное давление, температуру тела, затем одновременно с проведением принудительных движений частей тела постоянно осуществляют измерение этих параметров, определяют разности между измеренными величинами и соответствующими допустимыми значениями, анализируют эти разности и на основе анализа формируют сигналы управления движениями частей тела, реализуют эти движения или прекращают последние.
Для повышения кинематической и динамической точности реализации программных движений частей тела пациента сигналы управления движениями вычисляют по функционалу, зависящему от отклонений параметров движения от их программных значений и от производных по времени от этих отклонений.
Для осуществления более эффективного лечебного действия движений на пациента режимы программных движений изменяют в зависимости от его индивидуального физиологического состояния либо в сторону усиления интенсивности движений, либо в сторону ее ослабления.
Введение в предлагаемый способ установления индивидуальных для каждого пациента предельно допустимых для него значений параметров физиологического состояния позволяют объективно выбрать режим движений, а постоянное измерение этих параметров и контроль за изменением величины разности их значений по отношению к допустимым позволяют регулировать интенсивность движений, увеличивая или уменьшая ее, или вообще прекратить процедуру в данный момент. Особенность способа состоит в том, что он не зависит от визуальной обратной связи пациента (ребенка) с врачом и от интуиции последнего для определения режимов движений, что расширяет функциональные возможности способа и применимо для пациентов в любом состоянии всех возрастов, включая новорожденных.
Для осуществления способа разработано устройство для биомеханической стимуляции мышц и восстановления двигательных функций, содержащее установленные на основании привод, устройство управления приводом, приспособления для крепления частей тела, взаимосвязанные с приводом через датчики реальных законов движения, процессор, источник электропневмопитания, в котором согласно изобретению исполнительные устройства привода выполнены в виде блоков, секций и элементов, представляющих собой расположенные на основании надувные камеры, соединенные системой электропневмоклапанов с источником электропневмопитания и снабженные датчиками физиологического состояния, при этом последние датчики и датчики реальных законов движения подключены ко входу процессора, выход процессора и датчики физиологического состояния подключены ко входу устройства управления приводом, которое соединено с источником электропневмопитания.
Выполнение устройства для стимуляции описанным образом позволяет автоматически реализовывать движения пациента согласно современным методикам лечебной физкультуры, обеспечивать независимость движений разными частями тела, а также регулировать интенсивность движений в сторону увеличения или уменьшения и вовремя дать сигнал о прекращении принудительных движений в зависимости от состояния пациента.
Изобретения поясняются чертежами, где на:
- фиг. 1 изображена функциональная блок-схема устройства для осуществления способа стимуляции мышц и восстановления двигательных функций;
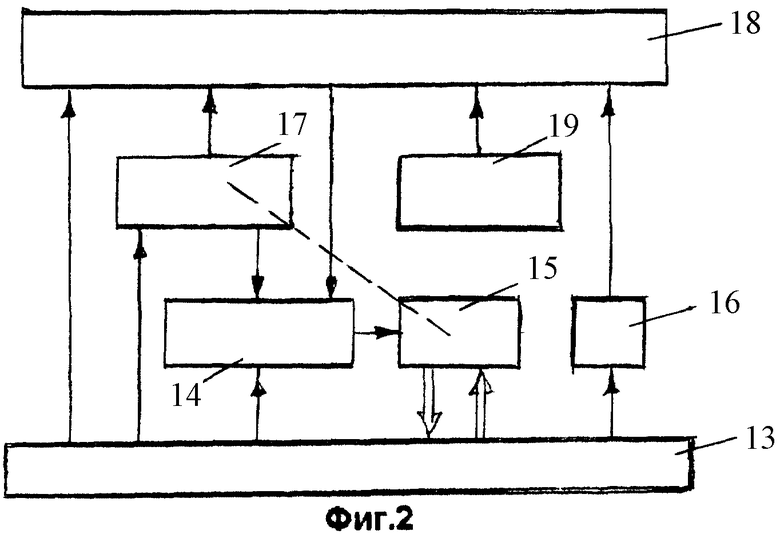
- фиг.2 - блок-схема управления устройством;
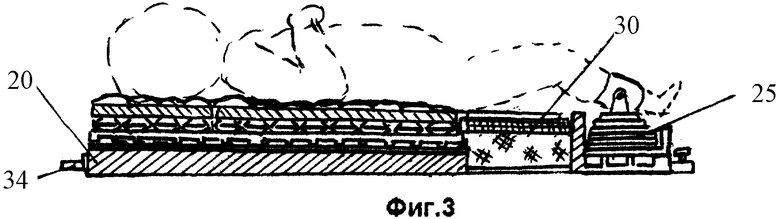
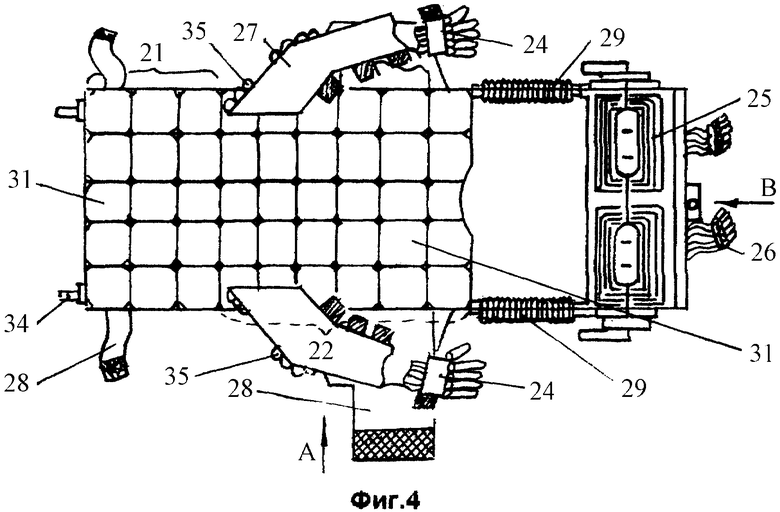
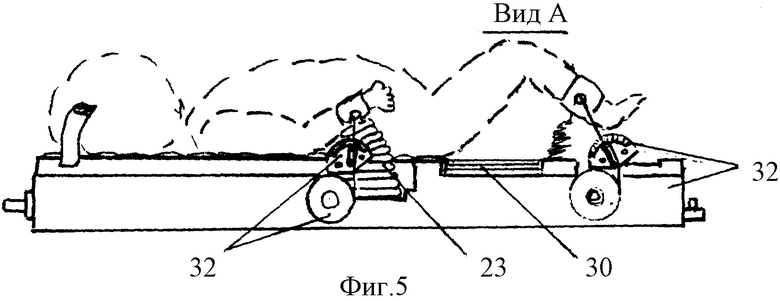
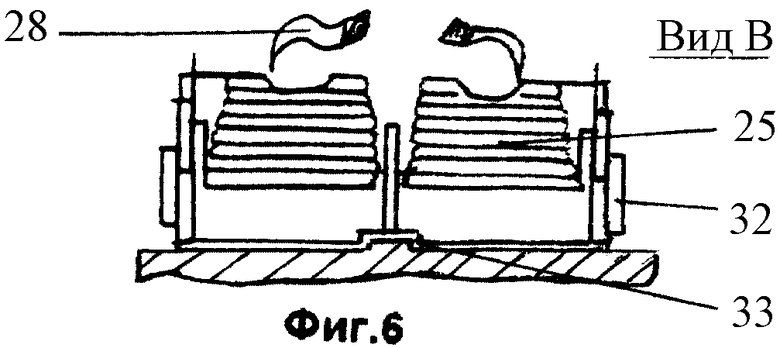
- фиг. 3,4,5,6 - изображены исполнительные элементы блоков привода головы, туловища, рук и ног;
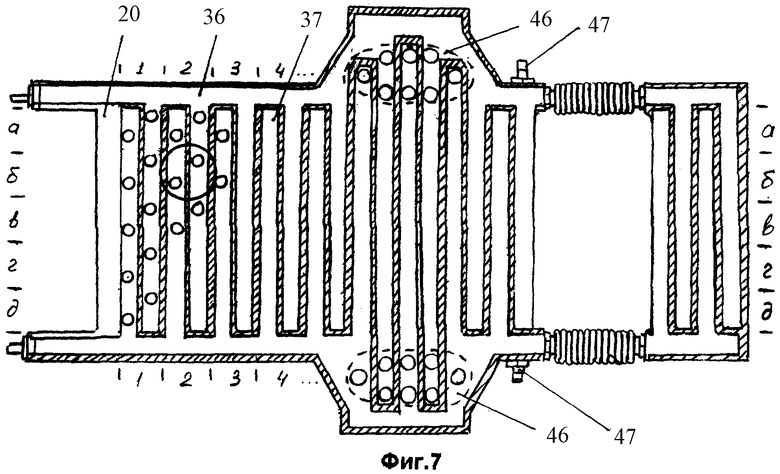
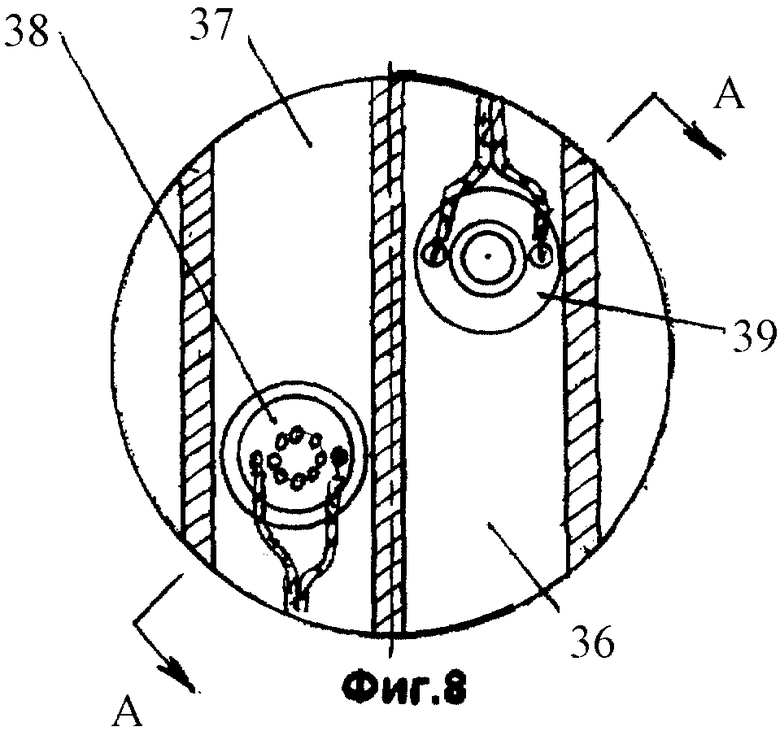
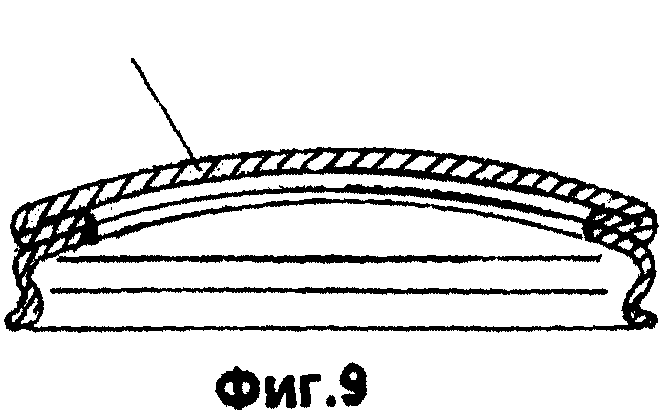
- фиг. 7,8,9,10 - изображен вид основания устройства снизу (с условно снятой герметизирующей крышкой) с указанием расположения каналов подвода и откачки воздуха;
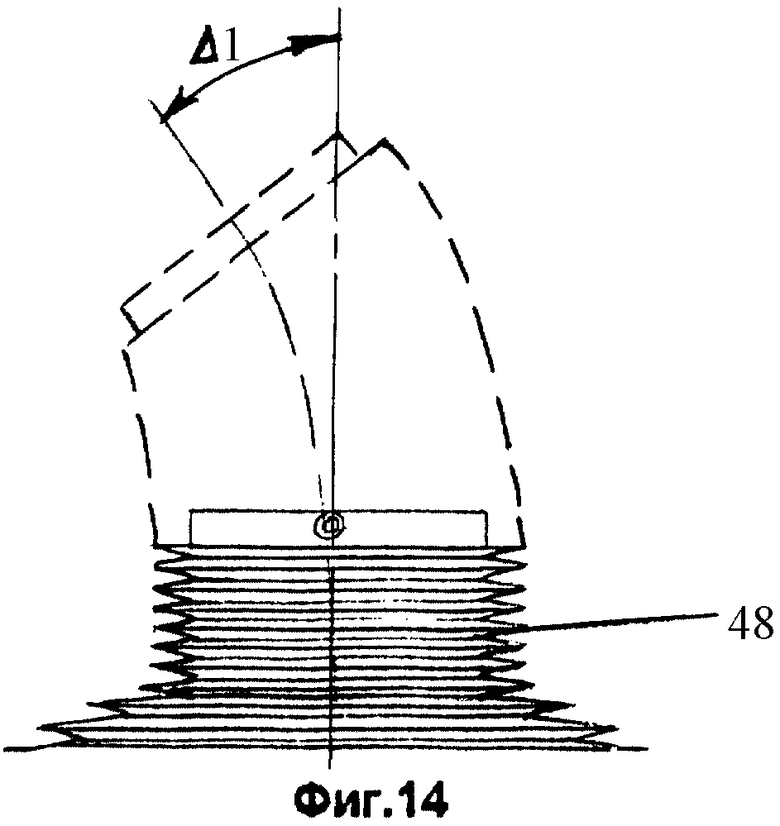
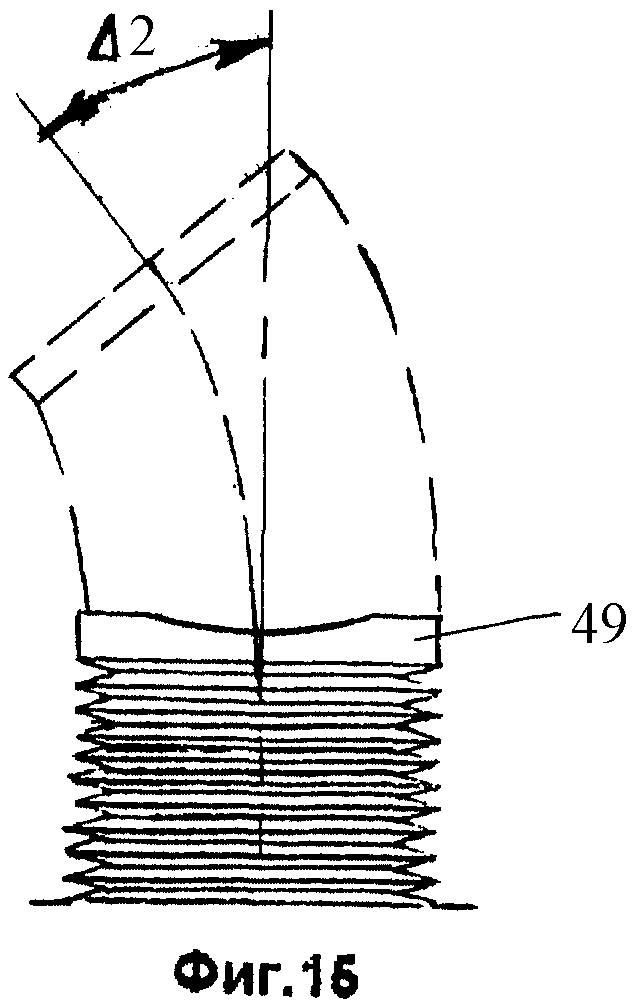
- фиг. 11,12,13,14,15,16 - изображен возможный вариант конструкции привода ног и рук;
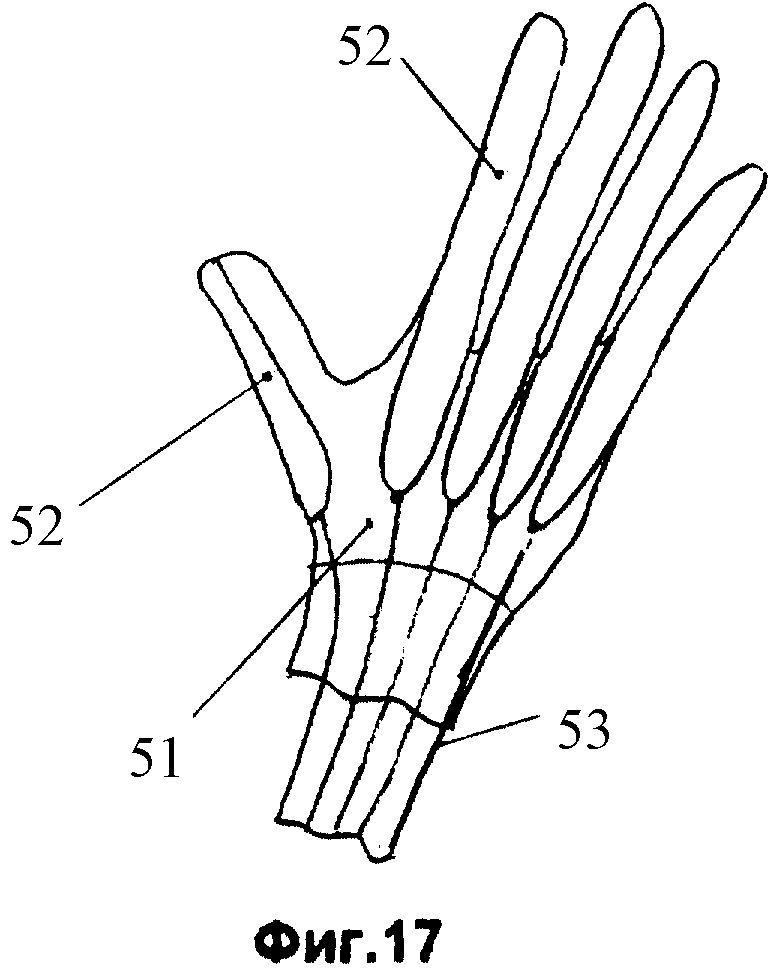
- фиг.17,18,19 - изображен блок привода пальцев рук и ног.
Устройство, осуществляющее способ биомеханической стимуляции мышц и восстановления двигательных функций, содержит (фиг.1) исполнительные устройства привода 1, находящиеся в контакте с пациентом и приводящие в движение части его тела, датчики 2 параметров физиологического состояния пациента, соединенные с одним из входов коммутатора 3 сигналов датчиков физиологического состояния пациента, имеющего два входа и три выхода. Второй вход коммутатора 3 соединен с блоком памяти 4, в котором хранится априорная информация об индивидуальных лечебно-допустимых интервалах изменения параметров физиологического состояния пациента. Один выход коммутатора 3 соединен с вычислительным блоком 5, генерирующим программные законы движений привода, реализующие методики лечебной физкультуры для нормального режима лечения, а выход блока 5 соединен с входом суматора 6. Датчики 7 параметров реальных законов движения исполнительных устройств привода через исполнительные устройства соединены с устройством 8 управления приводом. Второй выход коммутатора 3 соединен с вычислительным блоком 9, генерирующим адаптируемые к физиологическому состоянию пациента законы движения привода, реализующие усиленный тренировочный режим лечебной физкультуры, подаваемые на вход сумматора 10. Третий выход коммутатора 3 соединен с вычислительным блоком 11, генерирующим программные законы аварийного останова привода из-за плохого физиологического состояния пациента. Выходы датчиков 7 соединены с коммутатором 12 сигналов датчиков реальных законов движения исполнительных устройств привода, имеющим один вход и два выхода: "удовлетворительно" - по этому сигналу привод продолжает работу, и "неудовлетворительно" - по этому сигналу привод останавливается из-за технических несоответствий, отклонений от номиналов.
Коммутаторы 3, 12, блок памяти 4, сумматоры 6, 10 и вычислительные блоки 5, 9, 11 объединены в единое устройство - процессор, осуществляющий хранение априорной информации и обработку измеряемой информации для генерирования вычисляемой информации в соответствии с критериями-функционалами, характеризующими состояние пациента и состояние привода.
Согласно предлагаемому способу, исполнительные устройства привода 1 реализуют движения головы, туловища, конечностей и пальцев конечностей пациента, на котором фиксированы датчики 2 его физиологического состояния. Сигналы с датчиков 2 подают на первый вход коммутатора 3, на второй вход которого подают эталонные сигналы из блока памяти 4, соответствующие требуемой программе-методике лечебной физкультуры. Сигналы датчиков и эталонные сигналы сравнивают в коммутаторе 3, в результате чего вырабатывают один из трех выходных сигналов, оцениваемые соответственно как "удовлетворительно", "хорошо" и "плохо".
Если выходной сигнал коммутатора 3 имеет оценку "удовлетворительно", то его подают на вход вычислительного блока 5, генерирующего сигналы о программных законах движения привода, реализующих методики лечебной физкультуры для нормального режима лечения, которые подают на неинвертирующий вход сумматора 6, на инвертирующий вход которого подают сигналы с датчиков 7 реальных законов движения привода, а выходные сигналы сумматора 6 подают на устройства управления 8 приводом.
Если выходной сигнал коммутатора 3 имеет оценку "хорошо", то его подают на вход вычислительного блока 9, генерирующего адаптируемые к физиологическому состоянию пациента сигналы о программных законах движения привода, реализующих усиленный тренировочный режим лечебной физкультуры, которые подают на неинвертирующий вход сумматора 10, на инвертирующий вход которого подают сигналы датчиков 7 реальных законов движения привода, а выходные сигналы сумматора 5 подают на устройства управления 8 приводом.
Если выходной сигнал коммутатора 3 имеет оценку "плохо", то его подают на вход вычислительного блока 11, генерирующего сигналы о программных законах аварийного останова привода, которые подают на устройства управления 8 привода с целью его останова. Аварийный останов привода будет реализован и по сигналам датчиков 7 реальных законов движения привода в том случае, если реальные величины углов или угловых скоростей или угловых ускорений будут таковы, что критерий-функционал, вычисляемый в коммутаторе 12, будет иметь оценку "неудовлетворительно", в результате чего его выходной сигнал подаст команду на останов привода по техническим причинам.
Согласно предлагаемому способу, пациента помещают в бокс (например, в устройство, подобное боксу-инкубатору для недоношенного в случае, когда пациентом является новорожденный), оснащают пациента датчиками 2 его физиологического состояния и подсоединяют к нему исполнительные устройства 1 привода и устанавливают голову, туловище, конечности и кисти конечностей в исходное положение в соответствии с требованиями лечебной физкультуры. Включают устройства управления 8 приводом, которые реализуют программные законы движения приводом, генерируемые либо блоком 5, либо блоком 9 для случаев, когда состояние пациента оценивается соответственно либо как "удовлетворительно", либо как "хорошо". В том случае, когда состояние пациента оценивается как "плохо", блоком 11 генерируются сигналы о программных законах аварийного останова привода, которые подают на устройства управления 8, и привод останавливается. Привод останавливается и в том случае, когда сигналы датчиков 7 реальных законов движения привода будут превышать допустимые величины в смысле заданного функционала-критерия, характеризующего состояние привода. Таким образом, останов привода предусмотрен по двум причинам: из-за плохого физиологического состояния пациента и из-за возможных технических неисправностей привода.
Реализация предлагаемого способа предполагает наличие трех помещений: реабилитационной палаты, операторской комнаты и силового помещения. В реабилитационной палате размещают боксы для пациентов с устройствами для лечения и восстановления двигательных функций, в операторской комнате располагают компьютер с мониторами, в силовое помещение выносят все необходимые источники энергии: электропитания, пневмопитания и др. Для каждого помещения необходим свой обслуживающий персонал: врач-педиатр, инженер-программист, техник. После постановки диагноза заболевания у каждого пациента собирают всю необходимую информацию и заносят ее в компьютер, формируя банк данных. Затем больных размещают в боксы. К каждому больному подсоединяют датчики его физиологического состояния и исполнительные устройства привода. За каждым больным в реабилитационной палате "закреплен" соответствующий монитор в операторской комнате, хотя не исключается и последовательный обзор с одного монитора с оптимальной частотой. С каждого бокса к центральному процессору (системному блоку компьютера) подключают кабели от датчиков физиологического состояния и от датчиков реальных законов движения привода. После включения и загрузки центрального процессора с клавиатуры компьютера подается команда запуска на режим лечебной физкультуры того или иного пациента, информация о состоянии которого отражена на соответствующем мониторе. Далее начинается процесс лечения пациентов путем реализации индивидуальной для каждого из них методики лечебной физкультуры в реабилитационной палате, а в операторской палате ведется процесс обработки информации с целью управления и выдачи необходимой врачебной информации, заканчивающийся выдачей необходимой врачебной документации.
Согласно предлагаемому способу, в основу создания реализующего его устройства необходимо положить следующие принципы:
1. Устройство должно автоматически реализовывать движения пациента согласно современным методикам лечебной физкультуры.
2. Особенность стимуляции мышц у ребенка заключается в отсутствии визуальной обратной связи его с врачом, что необходимо учитывать при создании привода этого устройства.
3. Устройство при длительном его использовании не должно приводить к повреждению элементов скелета, мышц и кожного покрова пациента.
4. Устройство не должно оказывать вредных побочных эффектов на состояние пациента и не должно оказывать вредного влияния на окружающую среду.
Эти принципы были заложены в предлагаемом способе. Для реализации сформулированных принципов необходимо выполнить следующие требования:
1. Устройство должно: 1) иметь привод, реализующий требуемый характер пространственного движения частей тела пациента; 2) иметь надежную систему предохранения от нежелательных режимов работы при отказах каких-либо цепей управления или при механических повреждениях конструкции, и при этом не травмировать пациента и не изменять параметры окружающей среды; 3) быть универсальной по использованию: в палате для доношенных и в боксе-инкубаторе для недоношенных детей; 4) удовлетворять специфическим медицинским требованиям: стерильности и др.; 5) иметь такую блочную структуру, при которой блоки и агрегаты, оказывающие негативное воздействие на пациента, могут быть удалены в отдельное помещение; 6) иметь минимальные объемно-массовые характеристики; 7) быть сориентированной на какой-либо один вид энергии.
2. Устройство не должно изменять параметры окружающей пациента среды за пределы допустимых значений.
3. Материалы конструкций, взаимодействующих с телом пациента, должны обладать податливостью в той степени, которая необходима для компенсации неточностей начальной установки и неточностей реализации законов движений частей тела в смысле снятия перенапряжений суставов, элементов скелета, мышц и сухожилий.
Устройство управления для биомеханической стимуляции мышц и восстановления двигательных функций пациента, реализующее предлагаемый способ, включает в себя (фиг.2) блок электропневмопитания 13, привод, состоящий из устройства управления 14, исполнительных устройств 15 и датчиков 16 реальных законов движения, датчиков 17 физиологического состояния пациента, процессора 18. Пульт 19 позволяет взрослому больному самостоятельно выбирать режимы лечебной физкультуры.
Конструкция устройства, реализующего предлагаемый способ (фиг.3, 4, 5, 6), состоит из основания 20, в котором вмонтированы блоки 21 и 22 приводов соответственно головы и туловища и две секции 23 привода рук. Имеются также два блока 24 привода кистей и пальцев рук, две секции 25 привода ног и два блока 26 привода ступней и пальцев ног. На блоке 22 привода туловища закреплены два развернутых рукава 27 с надувными элементами привода плеча и встроенными датчиками физиологического состояния пациента. Голова, туловище, руки и ноги закрепляются относительно соответствующих приводов с помощью мягких эластичных ленточных фиксаторов 28 с использованием "липучки". Часть конструкции рассматриваемого устройства, включающая приводы 25 и 26, имеет возможность горизонтального перемещения в направлении туловища по направляющим 33, при этом гибкая гофрированная трубка 29 обеспечивает герметичное соединение частей пневмосистемы. На уровне нижней части туловища пациента располагается набор 30 сменных гигиенических элементов, включающий матрац, клеенку, подстилку, пеленку и подгузник с вложенным датчиком влажности. Элементы 31 блоков приводов головы и туловища представляют собой индивидуально управляемые надувные конструкции, подробнее изображенные на фиг.7, 8, 9, 10. Четыре группы датчиков 32, установленных на основании 20 вблизи приводов 23 и 25 рук и ног, позволяют контролировать реальные законы движения приводов. На основании 20 имеются штуцеры 34 для соединения с пневмосистемой. На рукавах 27 установлены надувные элементы 35 привода плеча.
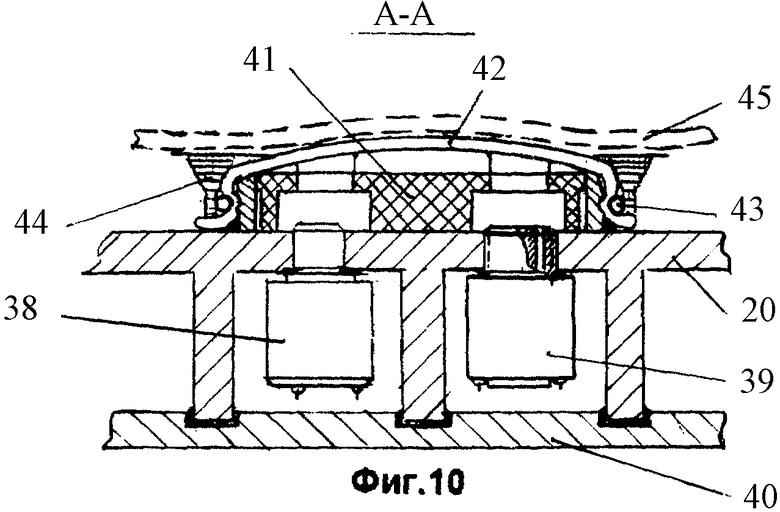
Снизу основания 20 (фиг.7) имеются фрезерованные фигурные разделенные каналы 36 и 37 соответственно пониженного и избыточного давлений. Из этих каналов каждый исполнительный надувной элемент управляется индивидуально парой электропневмоклапанов, один из которых (позиция 38 на фиг.8) управляет подачей избыточного давления, а второй (позиция 39 на фиг.8) управляет откачкой или стравливанием воздуха. Электропневмоклапаны вворачиваются в основание 20 корпуса с использованием герметичной прокладки. Герметизирующая крышка 40 обеспечивает изоляцию каналов 36 и 37 от атмосферы. Фигурный упор-распределитель 41 обеспечивает распределение воздуха внутри надувного элемента-колпачка 42 и гарантирует его функционирование. Надувные элементы-колпачки 42 могут иметь несколько гофров (фиг.9), что обеспечит больший ход рабочей поверхности при необходимости. Стопорное кольцо 43 (фиг.10) обеспечивает закрепление надувного элемента 42 на основании 20. Фигурная решетка 44, заполняющая промежутки между надувными элементами, обеспечивает общее выравнивание поверхности с использованием подстилки 45. На участках 46 расположены электропневмоклапаны в количестве, обеспечивающем эффективную работу приводов рук. Штуцеры 47 (фиг.7) предназначены для соединения с блоками привода кистей и пальцев. Элементы 31 (фиг.4) блоков привода движений головы и туловища, управляемые индивидуально, расположены в виде взаимно перпендикулярных (горизонтальных) рядов, обозначенных соответственно буквами а, б, г, д и цифрами 1, 2, 3, 4,... и т.д. (фиг.7) в зависимости от длины тела пациента. Индивидуальное управление элементами 31 позволяет получить множество вариантов реализации движений или массажа. В частности, управляя одновременной работой элементов в рядах, можно получить продольные или поперечные волновые массирующие воздействия, а также и волновые движения, ориентированные под различными углами, последовательно или встречно. Кроме того, возможен вариант случайного закона управления элементами с целью эффективных и разнообразных режимов массажа тела. Управление элементами в секциях, рядах и блоках позволяет реализовать движения туловища и головы требуемым образом. Так, например, надув элементов с координатами а1, а2, а3; б1, б2, б3; г4, г5, г6; . . ., д4, д5, д6;... позволяет получить относительные повороты головы и туловища вокруг продольной оси тела и т.п. Устройство позволяет вызвать повороты головы из стороны в сторону, наклоны головы вперед-назад. Аналогичные движения можно вызвать и у туловища. Использование устройства (фиг.3) предполагает наличие выравнивающего и термоизолирующего коврика и гигиенической подстилки.
Так как конструкции приводов (фиг.3) головы, туловища, рук и ног выполнены в виде надувных деформируемых, имеющих соответствующую жесткость элементов, секций, блоков, то учет этого обстоятельства сможет удовлетворить одному из основных требований механической безопасности эксплуатации устройства: приводы обладают податливостью в такой степени, которая обеспечивает травмобезопасность пациента.
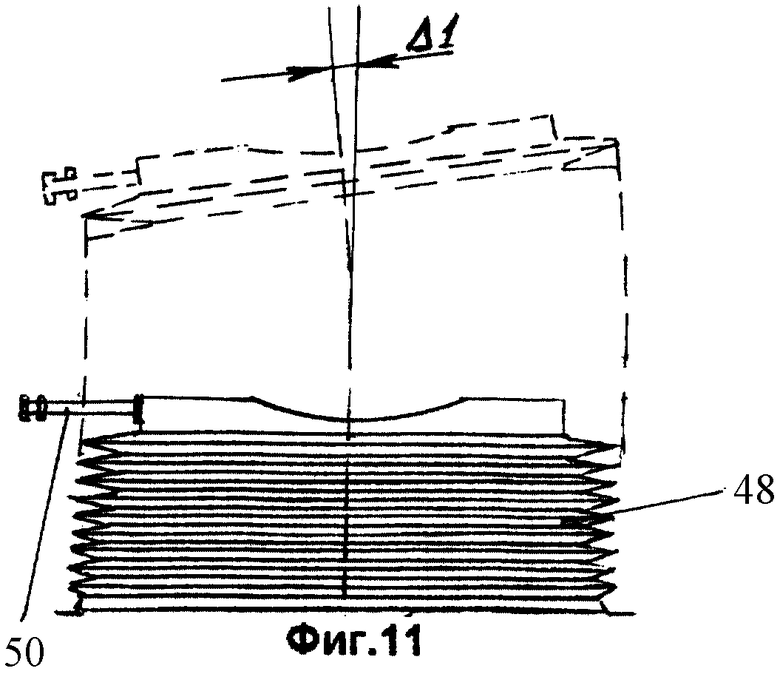
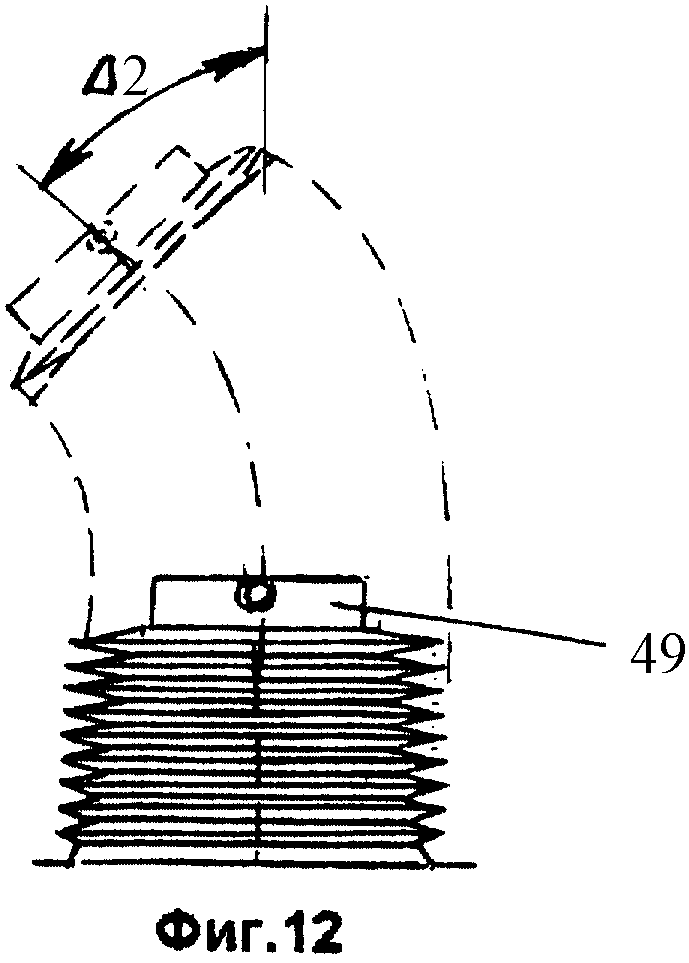
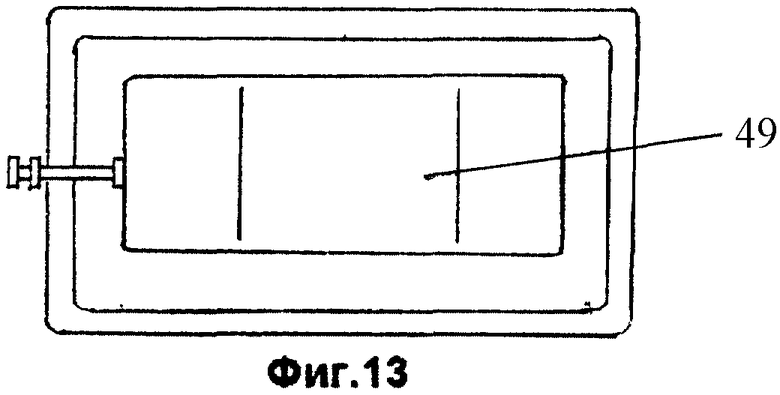
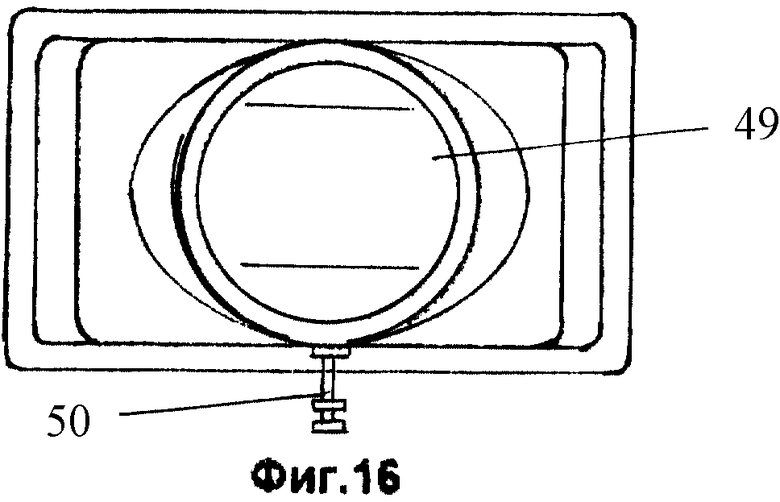
Возможный вариант конструкции привода ног (фиг.11,12, 13) и рук (фиг. 14,15,16) представляет собой гофрированный (типа гармошки) надувной герметичный толкатель 48 с закрепленным на нем ложементом 49, имеющим форму, удобную для закрепления конечности. Для контроля реальных законов движения привода на ложементе 49 закреплен поводок 50, к которому прикрепляется гибкая нить измерительного устройства. Такой привод ног обладает большей устойчивостью вокруг оси, параллельной ногам, и меньшей устойчивостью вокруг ей перпендикулярной горизонтальной оси (Δ2 > Δ1), что и требуется для нормальной работы привода без травмирования ног, причем одновременно конечная жесткость привода на стадии наполнения воздухом будет осуществлять "натяжение" ног, а на стадии откачки воздуха осуществляется естественное движение ног, допускаемое ногой совместно с приводом. А конструкция привода руки является равножесткой (Δ2 = Δ1), что позволяет реализовать естественные пространственные движения рук.
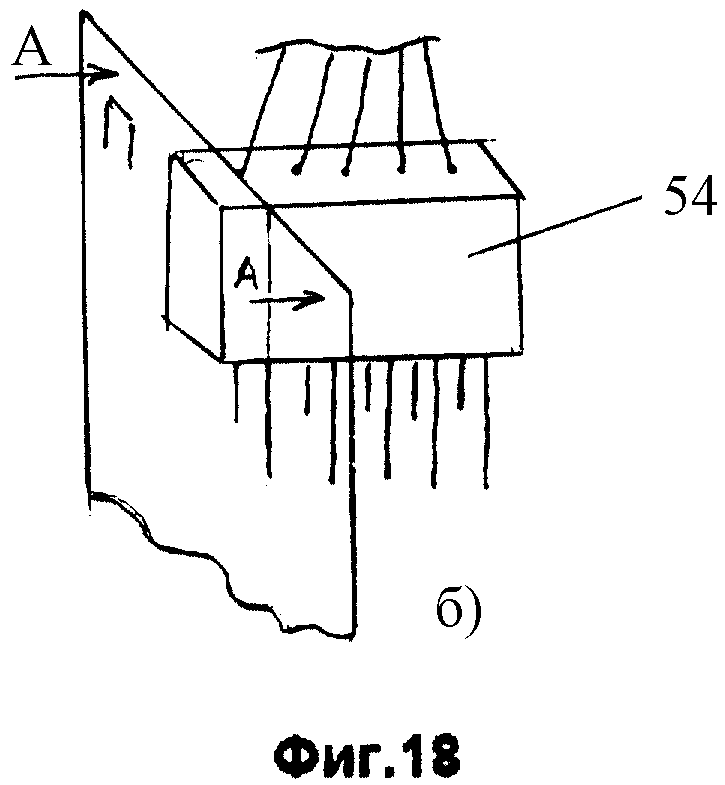
Исполнительные устройства привода для приведения в движение пальцев руки (фиг.17) представляют собой полуперчатку 51, каждый напальник которой с внутренней стороны изготовлен из упругого материала, а с наружной стороны имеет камеру 52, к которой подведена трубка 53 от блока клапанов 54 (фиг.18).
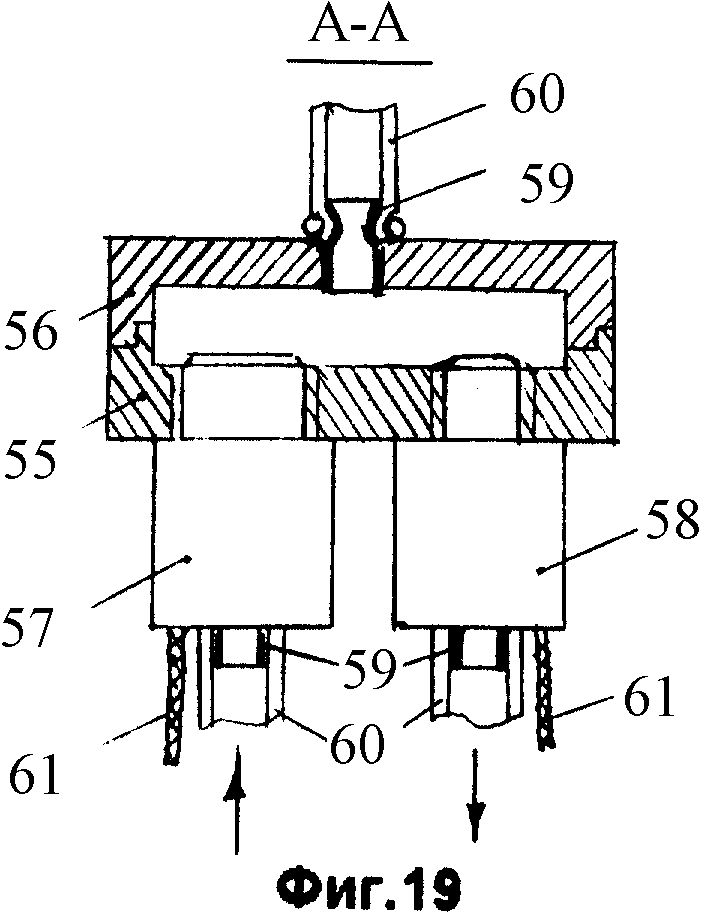
Блок клапанов (фиг. 18) привода пальцев конечностей представляет собой корпус 55 с крышкой 56 и пятью парами цилиндрических отверстий с резьбой в корпусе, в каждую пару из которых ввинчены впускной клапан 57 и выпускной клапан 58. Эти клапаны через втулки 59 и трубки 60 герметично подсоединены к компрессору и вакуумному насосу. В крышку 56 герметично вмонтированы втулки 59, на которые герметично посажены трубки 60, которые другими концами герметично соединены с камерами полуперчатки. К каждому клапану подведен электропровод 61 для подачи управляющих импульсов из процессора.
В предварительно подкачанном состоянии напальников полуперчатки 51 (фиг. 17) их надевают на каждый палец руки (ноги) пациента, затем на клапаны 54 (фиг. 18) подают управляющие импульсы на откачку воздуха из напальников, в результате пальцы руки (ноги) сжимаются под действием сил упругости. При подаче электрических управляющих импульсов из процессора на клапаны 57 (фиг. 19) осуществляется накачка воздуха в камеры 52 (фиг.17) и пальцы разгибаются. При подаче электрических управляющих импульсов из процессора на клапаны 58 (фиг.19) осуществляется откачка воздуха из камер 52 (фиг.17) и пальцы сгибаются. При этом изменением частоты подачи импульсов будет реализовано изменение скорости разгибания и сгибания пальцев. Описанное устройство позволяет двигать каждым пальцем руки (ноги) как отдельно друг от друга с разными движениями, так и всеми вместе: сжатие в кулак (пригибание к стопе) и разгибание в прямую ладонь (прямую ступню). То есть может быть реализован любой требуемый режим движения, информация о котором хранится в блоке памяти процессора.
В качестве датчиков физиологического состояния ребенка могут быть использованы датчики температуры, пульса (частоты сердечных сокращений), кровяного давления, влажности с цифровым выходом, такие, например, которые входят в состав системы мониторинга физиологических функций /3/ или в состав клинического инкубатора - кювеза /4/.
В качестве датчиков реальных законов движения привода могут быть использованы, в частности, индуктивные датчики углов и линейных перемещений /5/.
В качестве источников пневмопитания: а) устройства подкачки воздуха в пневмосистему может быть использован поршневой компрессор /7/, б) устройства откачки воздуха из пневмосистемы может быть использован вакуумный насос /8/. Если эти устройства являются достаточно шумящими, то они могут быть объединены в блок и вынесены за пределы помещения, в котором находится пациент.
В качестве электропневмоклапанов могут быть использованы устройства /9/.
В качестве процессора, в котором осуществляется хранение априорной информации и обработка измеряемой информации с целью генерирования вычисляемой информации для подачи импульсов управления на электропневмоклапаны и для подачи других необходимых сигналов, может быть использован системный блок универсальной ЭВМ типа IBM PC 486DX с объемом оперативной памяти не менее 4 мб, объемом памяти винчестера не менее 250 мб и тактовой частотой не менее 40 мГц /6/, допускающая стыковку с системой датчиков с использованием аналого-цифрового преобразователя и снабженного выходным усиливающим блоком, соединенным с ЭПК системы или микро PC, например, фирмы Ohtagon System /10/.
В качестве источника электропитания может быть использована обычная электрическая сеть с напряжением 220 В и частотой 50 Гц. Например, потребляемая предлагаемым устройством мощность при обслуживании нескольких детей годовалого возраста (до десяти) не будет превышать 5 кВт.
Работа устройства для биомеханической стимуляции мышц, восстановления двигательных функций и тренировки правильных движений человека начинается с подачи электропитания на процессор 18 (фиг.2), датчики 17 физиологического состояния, датчики 16 реальных законов движения привода, устройства 14 управления приводом и с подачи пневмопитания на исполнительные устройства привода 15, после чего осуществляется контроль функционирования - тестирование всех необходимых элементов системы. Далее укладывают больного на основание устройства, закрепляют голову и туловище фиксаторами, закрепляют на руках рукава с датчиками физиологического состояния, запястья рук и голени ног укладывают в мягкие податливые ложементы толкателей приводов и закрепляют с помощью эластичной тканевой ленты (с "липучкой"), на пальцы рук и ног надевают полуперчатки, предварительно подготовленные к надеванию путем небольшой накачки воздуха в напальники. После этого в процессор подают командный сигнал на реализацию требуемого режима работы устройства и процессор начинает генерировать сигналы, содержащие информацию о программных движениях частей тела больного, которые через устройства управления 14, реализованные системой электропневмоклапанов, приводят в движение исполнительные устройства 15, т. е. по заданной программе впускают воздух в элементы, секции и блоки приводов головы, туловища, рук, ног, пальцев рук и пальцев ног и выпускают воздух из этих элементов. В том случае, если сигналы датчиков 17 физиологического состояния превышают заданные допустимые значения, то исполнительные устройства 15 выходят на более щадящий режим, вплоть до программного останова предлагаемого устройства. И в случае, если сигналы датчиков 16 реальных законов движения привода превышают заданные допустимые значения, то также осуществляется программный останов предлагаемого устройства, но уже по техническим причинам.
Пациент, способный самостоятельно или с использованием измеренной информации и в соответствии с самочувствием принимать решения об изменении режима лечебной физкультуры, вводит с расположенного у него "под рукой" пульта 19 (фиг.2) информацию об изменениях режимов работы устройства.
Таким образом, предлагаемые способ и устройство позволяют высокоэффективно заменить и существенно превзойти возможности квалифицированного медперсонала, так как: 1) имеется объективная информация о физиологическом состоянии пациента, используемая для выбора режимов работы устройств; 2) каждое из устройств позволяет реализовать до 60 и более независимых движений, что невозможно реализовать нескольким медработникам одновременно и тем более одному врачу; 3) один оператор в состоянии обслуживать несколько (до десяти) установок с пациентами, объединенных центральным процессором.
Предлагаемые способ и устройство могут найти широкое применение для лечения большого класса нарушений двигательных функций, не исключая и нарушения, вызванные физическими травмами, применительно к больному любого возраста. При этом используемые устройства могут быть разделены на несколько типоразмеров и мощностей и отличаться друг от друга последними. То есть толкающие усилия и размеры надувных элементов для взрослого человека должны быть пропорционально большими по сравнению с таковыми для ребенка. Например, надувные элементы (поз. 31 на фиг.4) целесообразно увеличить в 1,5-2 раза, ход секций (поз. 25 на фиг.3 и поз. 23 на фиг.5) должен обеспечивать перемещения элементов конечностей больше в 5-10 раз по сравнению с таковыми для ребенка годовалого возраста.
Источники информации
1. Большая медицинская энциклопедия. Т.7. - М.: Советская энциклопедия, 1977. - с.567-603.
2. Фрайзен П., ред. Микрокомпьютеры в физиологии. Пер. с англ. Н.Н.Алипова. Под ред. Б.А.Бабаяна. - М.: Мир, 1990. - с.265-268.
3. Система мониторинга физиологических функций Cardiocap ТМ 2. - Руководство по эксплуатации 880900-2. Фирма Datex. Instrument Corp. P.O. Box 446, SF-00101, Helsinki, Finland. 1993.
4. Клинический инкубатор IСВ-141. - Изготовитель: Акционерное общество электромедицинского приборостроения Медикор", г. Будапешт.
5. Аш Ж. и др. Датчики измерительных систем. Кн.1. Пер. с франц. - М.: Мир, 1962. - с.342-398.
6. Фигурнов В. Э. IBM PC для пользователя. Изд. 5-е. - М.: Финансы и статистика, НПО "Информатика и компьютеры", 1994. - с.25-66.
7. Френкель М.И. Поршневые компрессоры. 3-е изд. - Л.: Машиностроение, 1969. - 773 с.
8. Пипко А.И. и др. Конструирование и расчет вакуумных систем. 3-е изд. - М.: Энергия, 1979. - 504 с.
9. Артоболевский И.И. Механизмы в современной технике. Т.5. - М.: Наука, 1976. - с.536-537.
10. Каталог фирмы Ohtagon System Solution. 1995 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОПРОЛЕЖНЕВОЕ МАССАЖНОЕ УСТРОЙСТВО | 1998 |
|
RU2161471C2 |
| СПОСОБ ЛЕЧЕБНОЙ ГИМНАСТИКИ И УСТРОЙСТВО ДЛЯ ЛЕЧЕБНОЙ ГИМНАСТИКИ | 2012 |
|
RU2520248C2 |
| СПОСОБ ОЦЕНКИ ФИЗИЧЕСКОЙ КОНДИЦИИ ЧЕЛОВЕКА | 2002 |
|
RU2206273C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ТЕТРАПАРЕЗОМ | 2007 |
|
RU2347551C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ НОРМАЛЬНОГО МЫШЕЧНОГО ТОНУСА У ДЕТЕЙ В ВОЗРАСТЕ ДО 5 ЛЕТ С ГИПЕРКИНЕТИЧЕСКОЙ ФОРМОЙ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА | 2004 |
|
RU2269330C1 |
| СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2001 |
|
RU2211017C2 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| СПОСОБ РЕАБИЛИТАЦИОННОГО ЛЕЧЕНИЯ ОБЕЗДВИЖЕННОГО БОЛЬНОГО | 2010 |
|
RU2435560C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ МЫШЕЧНОГО ТОНУСА У ДЕТЕЙ СО СПАСТИЧЕСКИМИ ФОРМАМИ ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА | 2011 |
|
RU2482827C2 |
Изобретение относится к реабилитационной медицине и предназначено для лечения пациента с установленным диагнозом церебрального паралича или с иными нарушениями двигательных функций, допускающиее биомеханическую стимуляцию мышц при условии измерения объективной информации о его физиологическом состоянии и использовании этой информации для управления программными движениями, реализующими методики лечебной физкультуры. Голову, туловище, конечности и пальцы конечностей пациента устанавливают в начальное положение. Задают принудительные движения этих частей тела с одновременными измерениями параметров физиологического состояния больного. Сравнивают измеренные параметры с допустимыми значениями этих параметров. Формируют на основе этих сравнений и заданных программных законов движения частей тела сигналы управления. Сигналы управления вычисляют по функционалу, зависящему от отклонений параметров движения от их программных движений и от производных по времени от этих отклонений. Режимы программных движений изменяют в сторону усиления интенсивности движений или в сторону ее ослабления. Устройство для реализации способа включает основание, привод, осуществляющий требуемые движения частей тела, устройство управления приводом, приспособления для принудительного крепления конечностей к элементам привода, датчики реальных законов движения привода, процессор, источник электропневмопитания, при этом исполнительные устройства привода выполнены в виде блоков, секций и элементов, представляющих собой симметричные и несимметричные надувные камеры, управляемые индивидуально системой электропневмоклапанов от источника электропневмопитания, причем все камеры изготовлены из экологически чистых материалов, имеющих при необходимости остаточные упругие свойства по требуемым направлениям, а датчики реальных законов движения привода, установленные на нем, и датчики физиологического состояния подключены ко входу процессора, выход процессора и датчики физиологического состояния подключены ко входу устройства управления приводом. 2 с.п.ф-лы, 19 ил.
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ, ДАТЧИК ФАЗ ДЫХАНИЯ ДЛЯ УСТРОЙСТВА ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ И СПОСОБ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 1992 |
|
RU2049425C1 |
| US 5279283, 18.01.1994 | |||
| ШТАРК М.Б., ТРИСТАН В.Г | |||
| Биоуправления в медицине и спорте | |||
| - Омск, 1999, с.69 | |||
| ФРАЙЗЕН П | |||
| Микрокомпьютеры в физиологии | |||
| Пер | |||
| с англ | |||
| - М.: Мир, 1990, с.265-268. | |||

