Изобретение относится к области определения местоположения объекта с использованием гидролокаторов, а более конкретно - ко вторичному поиску уклоняющегося объекта группой наблюдателей после потери контакта с ним по данным, полученным с некоторым временем запаздывания tз.
Известен спиральный способ обзора пространства, применяемый в радиолокации [1]. Игольчатый луч развертки при этом быстро вращается по архимедовой спирали. Указанный способ обзора пространства может оказаться благоприятным фактором, сокращающим время поиска объекта, если априорная вероятность его наличия максимальна в центре зоны и убывает к границам. Последнее условие обычно выполняется при поиске объекта по данным предварительного целеуказания.
Однако данный способ для обследования водного пространства не нашел применения ввиду различия характеристик воздушного и водного пространств, отличающихся по скорости распространения сигнала в соответствующей среде на несколько десятков порядков.
Проблема обследования водного пространства заключается в определении оптимальной траектории движения носителя гидроакустических средств обнаружения объекта. При этом, как правило, скорость наблюдателя (носителя) и дальность действия средств обнаружения далеко несоизмеримы с параметрами радиолокационного обзора пространства.
Из известных способов последовательного обзора водного пространства наиболее близким по технической сущности является спиральный способ, причем наблюдатели движутся по логарифмической спирали, принятый нами за прототип [2] . Сущность способа заключается в следующем. Поиск наблюдателем (группой наблюдателей) начинается от точки потери контакта. Наблюдатели, используя свои гидроакустические средства обнаружения, перемещаются последовательно к границе области возможных местоположений объекта (фиг.1) по логарифмической спирали.
Курс и скорость объекта считаются неизменными на протяжении всего времени обследования пространства. При этом в начальный момент поиска курс цели предполагается равновероятным в пределах 0-360o, а скорость цели на весь период поиска - максимально возможной при уклонении. При наличии нескольких наблюдателей для получения наибольшего значения вероятности обнаружения объекта каждый наблюдатель направляется по своей спирали.
Данному способу обследования водного пространства присущи следующие существенные недостатки:
эффективный поиск возможен только лишь при соблюдении гипотезы о постоянстве курса и скорости уклоняющегося объекта в течение всего времени поиска, а также соответствии фактических параметров движения объекта параметрам, принятым в гипотезе;
невозможен поиск высокоскоростных объектов, скорость которых vл при уклонении превышает скорость движения наблюдателя vв;
поиск возможен лишь при относительно малом времени запаздывания с началом вторичного обследования.
Целью настоящего изобретения является повышение вероятности восстановления контакта с объектом и расширение предела допустимого времени запаздывания.
Поставленная цель достигается тем, что наблюдатели в момент начала обследования водного пространства равномерно размещаются по границе R0, превосходящей на величину радиуса средства обнаружения границу области возможных положений объекта, уклоняющегося с изменением курса и скорости, а затем двигаются по траекториям архимедовых спиралей, имеющих центры в районе точки потери контакта, обеспечивая в полярных координатах (R,ϕ) уравнение движения из исходных точек по формуле
где a-vs/ω - коэффициент;
vs - скорость смещения наблюдателей по радиусу к точке потери контакта;
ω - угловая скорость перемещения наблюдателей вокруг точки потери контакта,
в которых указанные спирали пересекают границу области возможных положений объекта, а количество наблюдателей выбирают из условия обследования водного пространства без пропусков, при заданных поисковых возможностях наблюдателей.
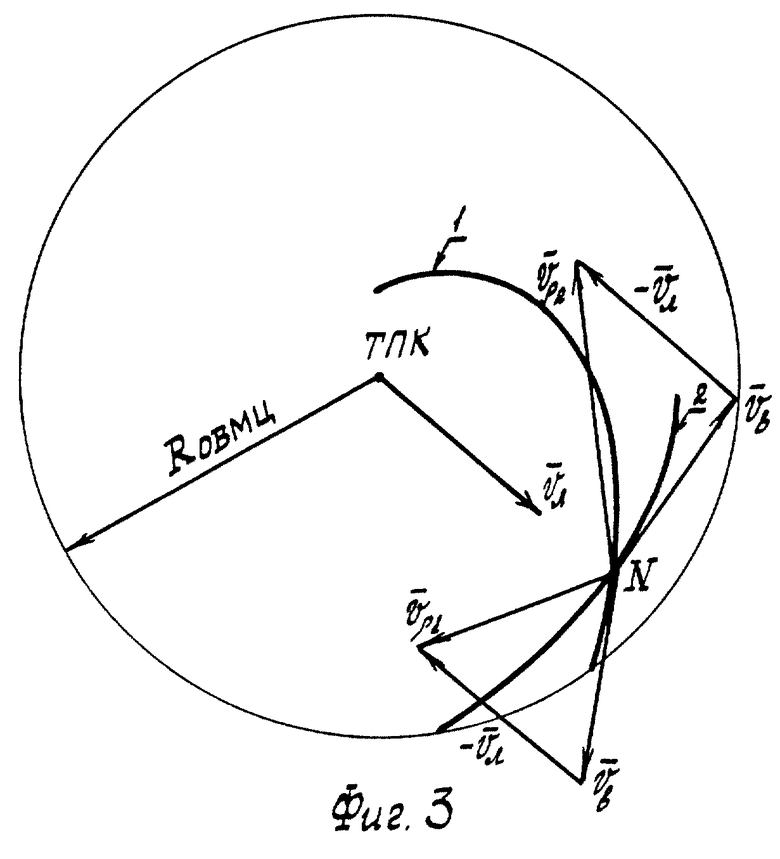
Благодаря изложенному порядку обследования увеличивается средняя относительная скорость сближения объекта поиска и наблюдателя vρ. На фиг.3 показано, что при одной и той же скорости поиска наблюдателя vв для предлагаемого способа обследования пространства и прототипа средняя относительная скорость vρ2 при поиске по архимедовой спирали от границы области возможных положений объекта к точке потери контакта больше скорости vρ1 при движении наблюдателя по логарифмической спирали от точки потери контакта.
Этот фактор позволяет повысить вероятность встречи наблюдателя и объекта, что полностью согласуется с основными положениями теории поиска: интенсивность обнаружения объекта возрастает пропорционально увеличению средней относительной скорости при одинаковых прочих условиях [3, с.124].
Кроме того, предлагаемый способ обследования водного пространства позволяет расширить пределы времени запаздывания, а следовательно, и границы области возможный положений объекта, при одинаковой с прототипом вероятности встречи наблюдателя и объекта.
Наконец, следующее достоинство предлагаемого способа обследования водного пространства - способ может быть применен при переменных курсе и скорости уклонения объекта. Следовательно, расширение границы области возможных положений объекта и указанный порядок последовательного обследования водного пространства приводят к более успешному обнаружению цели, чем в прототипе.
Таким образом, проведенный информационный поиск указывает на соответствие предлагаемого решения критерию новизны и изобретательскому уровню. Новизна изобретения выявлена в сравнении с прототипом и заключается в следующем:
до начала обследования наблюдатели размещаются по границе области поиска, превосходящей границу области возможных положений уклоняющегося объекта;
обследование водного пространства осуществляется последовательно по направлению к точке потери контакта по архимедовой спирали.
Сущность изобретения заключается в следующем. Обследование водного пространства при поиске объекта с определенным временем запаздывания, уклоняющегося переменными курсом и скоростью, производится наблюдателями с использованием средств обнаружения, имеющих радиус действия rобн. В момент начала поиска наблюдатели размещаются равномерно по границе поиска, отстоящей от границы области возможных местоположений объекта на величину радиуса действия наблюдателя. В ходе обследования наблюдатели последовательно перемещаются в направлении точки потери контакта. Каждый наблюдатель осуществляет последовательное обследование пространства, перемещаясь по архимедовой спирали, до момента обнаружения объекта иди до прихода в точку потери контакта в случае его необнаружения.
Сущность изобретения поясняется чертежами. На фиг.1 показан способ последовательного обследования водного пространства по логарифмической спирали четырьмя наблюдателями с отмеченными на графике точками использования средств обнаружения (прототип).
Фиг. 2 - способ последовательного обследования водного пространства по архимедовой спирали четырьмя наблюдателями (предлагаемое техническое решение). Для наглядности на чертеже показаны в точках использования средств обнаружения их радиусы действия только для начальной части спирали, остальные точки обследования изображены просто точками.
Фиг. 3 - векторная диаграмма определения средней относительной скорости vρ движения наблюдателя и объекта. Обозначения на чертеже: vв - скорость движения наблюдателя; vл - скорость движения уклоняющегося объекта; Roвмц - радиус области возможных местоположений уклоняющегося объекта; "1" - логарифмическая спираль; "2" - архимедова спираль.
Фиг. 4 - график вероятности обнаружения объекта наблюдателями в зависимости от времени запаздывания, количества наблюдателей и радиуса области возможных местоположений объекта. Обозначения на фиг.4: nн - количество наблюдателей; сплошная линия на графике - способ обследования по логарифмической спирали; пунктирная линия на графике - способ обследования по архимедовой спирали; tз - время запаздывания в минутах.
Что касается соотношения параметров движения группы наблюдателей, осуществляющих поиск объекта по архимедовой спирали, то далее приведены следующие выкладки для их обоснования.
Пусть Rовмц - граница области возможных положений объекта. Она равна произведению максимальной скорости уклонения объекта vцмакс на время запаздывания tз по восстановлению контакта
Rовмц = vцмакс • tз (1)
Начальное положение каждого из nн наблюдателей, размещенных равномерно по границе области возможных положений объекта, смещено по радиусу Rовмц наружу от точки потери контакта на величину радиуса средства обнаружения rобн
Rо = Rовмц + rобн. (2)
При движении наблюдателей по архимедовой спирали от границы области возможных положений объекта к точке потери контакта уравнение этой спирали в полярных координатах (R,ϕ) примет вид
где a = vs/ω - коэффициент; vs - скорость смещения точки по лучу при построении архимедовой спирали, или в нашем случае скорость смещения наблюдателей к точке потери контакта; ω - угловая скорость вращения луча, или угловая скорость перемещения наблюдателей вокруг точки потери контакта.
Период T1 обследования границы области возможных положений объекта одним наблюдателем равен отношению периметра этой границы к скорости движения наблюдателя
T1 = 2•π•Rовмц/vв. (4)
При наличии nн наблюдателей период обследования Tn сокращается в n раз:
Тn=T1/nн.
Угловая скорость перемещения для nн наблюдателей составит
ω = 2•π/TN = nн•vв/Rовмц. (5)
Тогда коэффициент "а" равен 1/n-ой части радиуса области возможных положений объекта, умноженной на отношение скоростей объекта и наблюдателя
Условие накрытия цели средством обнаружения требует равенства времени смещения цеди Тц и наблюдателя T1 в радиальном направлении на величину rs
Тц = rобн/vцмакс. (7)
Из соотношении 4 и 5 можно определить требуемое количество наблюдателей
При этом количество наблюдателей выбирается из условия обследования водного пространства без пропусков при заданных поисковых возможностях наблюдателей. Таким образом, определены все величины, входящие в уравнение архимедовой спирали (3).
Пример конкретного выполнения. Обследование водного пространства при вторичном поиске уклоняющегося объекта в соответствии с предложенным способом может быть реализовано следующим образом.
После потери контакта с объектом отмечается точка потери контакта (фиг. 2). Графически иди с помощью информационно-управляющей системы определяются: граница области возможных положений объекта и граница области начала поиска в зависимости от времени запаздывания и параметров, характеризующих поисковые возможности наблюдателей, а также возможности объекта по уклонению.
В зависимости от количества наблюдателей и параметров, характеризующих их поисковые возможности, вырабатываются исходные точки для первой и последующих точек обследования водной среды. При этом последующие точки обследования образуют архимедову спираль. Поиск производится до обнаружения объекта или до прихода наблюдателей в точку потери контакта.
Для удобства управления группой наблюдателей один из них назначается ведущим. Ведущий наблюдатель, производя последовательное обследование водного пространства, контролирует положение других наблюдателей в ходе обследования и при необходимости вводит корректуру.
Эффективность обследования водного пространства в соответствии с предложенным решением проверялась путем сравнения с эффективностью известного прототипа посредством моделирования на ЭВМ.
В модели были заложены следующие условия эксперимента:
курс цели распределен по равномерному закону в пределах 0-2π;
скорость объекта, переменная в зависимости от характера его уклонения, варьировалась в пределах от 6 до 30 узлов;
количество наблюдателей nн варьировалась от 2 до 4;
дальность действия средств обнаружения варьировалась от 2 до 12 миль;
время запаздывания изменялось от 10 до 60 мин;
вероятность получения контакта при встрече с объектом принималась равной 1.
Результаты моделирования, основные из которых представлены на фиг.4, показали преимущество предложенного способа обследования водного пространства по сравнению с прототипом и заключаются в следующем: вероятность обнаружения объекта оказалась выше во всем диапазоне исследуемого времени запаздывания.
Это превышение достигает 18% при максимальном времени запаздывания. Указанное преимущество сохраняется при различном наряде сил во всем диапазоне изменения дальности действия средств обнаружения.
Таким образом, использование предложенного способа обследования водного пространства для поиска объекта обеспечивает по сравнению с прототипом следующие преимущества:
увеличение вероятности обнаружения цеди при одинаковом наряде сил;
возможность обнаружения объекта с вероятностью не ниже, чем у прототипа при сокращении наряда сил на одну единицу;
увеличение времени запаздывания при равных других условиях;
возможность обнаружения объекта при условии, что скорость уклонения объекта больше скорости наблюдателя vл>vв.
Способ разработан на уровне технического предложения и может быть рекомендован для внедрения в существующих и перспективных информационно-управляющих системах организаций судостроительной промышленности.
Увеличение вероятности обнаружения объекта и предела допустимого времени запаздывания происходят в силу следующих факторов:
предложенный порядок обследования водного пространства способствует увеличению средней относительной скорости сближения наблюдателя с объектом поиска, благодаря чему возрастает интенсивность встречи наблюдателя с объектом, а следовательно, и вероятность обнаружения объекта;
движение наблюдателей по архимедовой спирали позволяет осуществить обследование водного пространства без пропусков;
за счет относительного встречного движения наблюдателя и объекта поиска появляется возможность расширения области возможных местоположений объекта, а следовательно, и времени запаздывания, при которых возможен успешный поиск объекта.
Источники информации
1. Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио., - 1978.
2. Справочник по исследованию операций. Под ред. Ф.А.Матвейчука. - М.: Воениздат. - 1979. - прототип.
3. И.Я.Динер. Исследование операций. - Л.: ВМОЛУА. - 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА ОБЪЕКТА, УКЛОНЯЮЩЕГОСЯ ОТ ОБНАРУЖЕНИЯ | 2003 |
|
RU2262719C2 |
| ВОЗВРАЩАЕМЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2185309C2 |
| ВЕТРОУСТАНОВКА С РОТОРАМИ МАГНУСА | 1993 |
|
RU2189494C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2185535C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 1994 |
|
RU2185540C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2185542C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2185534C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2188348C2 |
| ВИБРОИЗОЛИРУЮЩАЯ КОЛЬЦЕВАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2185536C2 |
| ПОДВЕСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2185295C2 |

Изобретение относится к определению местоположения объекта с использованием гидролокатора, а точнее - ко вторичному поиску уклоняющегося объекта. Сущность изобретения: наблюдатели в момент начала обследования водного пространства равномерно размещаются по границе области поиска, превосходящей границу возможных положений объекта на величину радиуса реагирования средств обнаружения, а затем двигаются по траекториям архимедовых спиралей, имеющих центры в районе точки потери контакта, из исходных точек, в которых указанные спирали пересекают границу области возможных положений объекта, причем количество наблюдателей в поисковой группе выбирают из условия обследования водного пространства без пропусков, при заданных поисковых возможностях наблюдателей. 4 ил.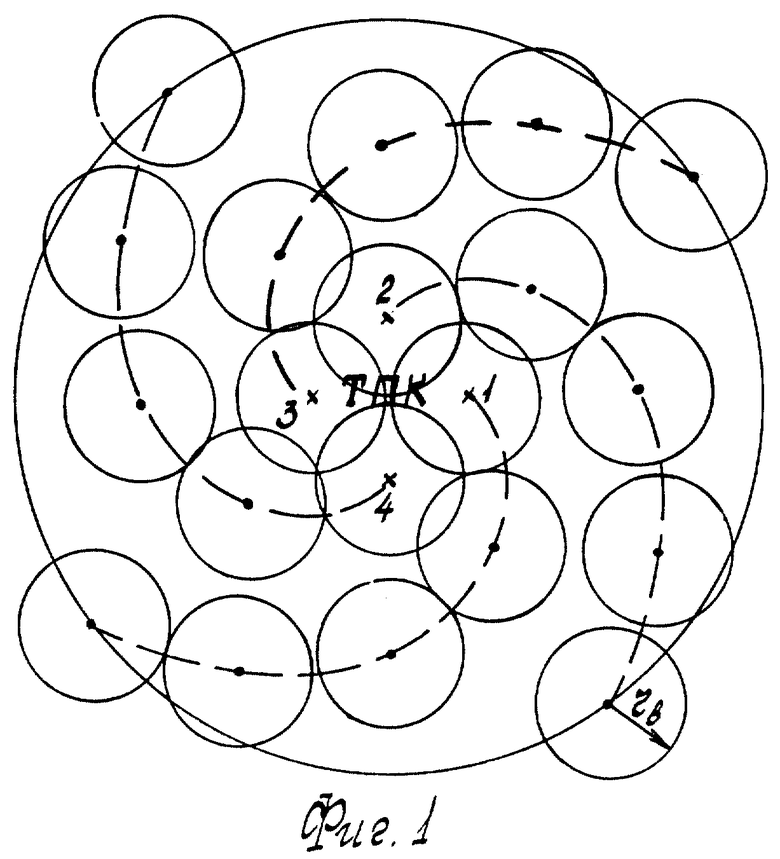
Способ последовательного обследования водного пространства при поиске уклоняющегося объекта, заключающийся в том, что наблюдатели, используя средства обнаружения, производят с некоторым временем запаздывания после потери контакта совместный поиск объекта, движущегося неизвестным курсом, при этом каждый наблюдатель перемещается по спирали и осуществляет последовательное обследование среды до обнаружения цели или достижения конечной границы области поиска, отличающийся тем, что наблюдатели в момент начала обследования водного пространства равномерно размещаются по границе R0, превосходящей на величину радиуса средства обнаружения границу области возможных положений объекта, уклоняющегося с изменением курса и скорости, а затем двигаются по траекториям архимедовых спиралей, имеющих центры в районе точки потери контакта, обеспечивая в полярных координатах уравнение движения из исходных точек по формуле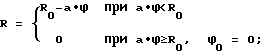
где a-vs/ω - коэффициент;
vs - скорость смещения наблюдателей по радиусу к точке потери контакта;
ω - угловая скорость перемещения наблюдателей вокруг точки потери контакта,
в которых указанные спирали пересекают границу области возможных положений объекта, а количество наблюдателей выбирают из условия обследования водного пространства без пропусков, при заданных поисковых возможностях наблюдателей.
| Динер И.Я | |||
| Исследование операций | |||
| - Л.: ВМОЛУА, 1969, с.124 | |||
| Абчук В.А., Матвейчук Ф.А., Томашевский Л.П | |||
| Справочник по исследованию операций | |||
| - М.: Воениздат МО СССР, 1979, с.207- 209. |
