Изобретение относится к системам управления и регулирования и может быть использовано для цифрового регулирования привода антенны метеорологического радиолокатора, в системах автоматического регулирования с обратной связью, в частности в позиционных следящих системах.
Широко известны позиционные следящие системы, которые используются в приводах управления антенной радиолокатора (см. В.Р. Арендт и К. Дж. Сэвент "Практика следящих систем", ГЭИ, 1962г., Москва-Ленинград, стр.11-12, рис. 1-3). Структурная схема системы содержит потенциометр командного сигнала (желаемого положения), усилитель, двигатель, зубчатую передачу, датчик обратной связи и сумматор, соединенные следующим образом. Командный сигнал устанавливает потенциометр в желаемое положение, выход которого в виде задающей входной величины соединен с первым входом сумматора, второй вход соединен с выходом датчика обратной связи, выход сумматора в виде сигнала рассогласования через усилитель соединен с двигателем, а выход последнего через зубчатую передачу соединен с управляемым валом, на котором находится датчик обратной связи.
Недостатками данного устройства являются недостаточная точность, а также проблемы с динамикой и устойчивостью системы в целом.
Известны следящие системы привода управления антенной, в которых производится цифровой съем угловых координат вала антенны. Вся остальная часть системы стандартная аналоговая. Схема съема угловых координат в цифровом коде основана на применении диска из прозрачного материала, жестко закрепленного на валу антенны. На диске наносится кодовая комбинация из прозрачных и непрозрачных участков, по одну сторону диска располагается протяженный импульсный источник света, а по другую - экран с узкой щелью, против которой располагаются фотодетекторы, число которых равно числу разрядов кода. Число нулей и единиц в момент съема и является двоичным кодом угла.
Недостатками являются сложная технология изготовления, неудобство в эксплуатации (в условиях повышенной запыленности и загазованности), недостаточная точность из-за наличия дифракции, а также обусловленная самим способом угловая протяженность ячейки младшего разряда, которая определяет цену единицы угла и точность отсчета (см. "Теоретические основы радиолокации", М. : Сов. Радио, 1978г., стр. 392-394).
Известна система управления приводом антенны, в котором сигнал ошибки поступает на первый вход суммирующего усилителя, на второй вход которого поступает сигнал обратной связи с тахогенератора, а ось тахогенератора кинематически связана с осью исполнительного двигателя. Управляющие обмотки исполнительного двигателя по сигналу суммирующего усилителя включаются на время до тех пор, пока двигатель разворачивает вал антенны до минимума сигнала ошибки (см. техническое описание (ТО) на "Аэрологический информационно-вычислительный комплекс АВК-1", предназначенного для комплексного зондирования атмосферы, также ТО Аэрологической радиолокационной станции "Бриз", "Сборник справочно-информационных материалов", ЦКБ Метеорологическое приборостроение, г. Обнинск, 1996 г.).
Недостатком данного привода является низкая точность из-за наличия зазора, имеющегося во всех зубчатых передачах. При этом, когда меняется направление движения, выходной вал теряет на короткий период согласованное положение с ведущим валом, в результате система "рыскает", т.е. совершает мелкое дрожание у нулевого положения.
Известен также радиотеодолит (RTEL) фирмы VAISALA Финляндия, в котором антенный привод состоит из блока управления приводом, электродвигателя с редуктором и антенного вала, причем двигатель через редуктор с антенным валом кинематически связан клиновой ременной передачей, а обратная связь осуществляется через тахогенератор на блок управления, который электрически связан с обмотками управления двигателя (см. RT Sounding Sistem, VAISALA Radiotheodolite and MARWIN, HELSINKI, FINLAND, 1993 г., P.O. Box 26, paqe 14-15) - ПРОТОТИП.
Недостатком данного устройства является недостаточная точность в силу противоречия между динамикой системы и ее устойчивостью, также износа и изменения во времени параметров ременной передачи.
Технической задачей изобретения является повышение точности управления положением вала антенны.
Для решения поставленной задачи предлагается система управления приводом антенны, содержащая микропроцессор, шаговый двигатель, силовой блок управления двигателя, волновую механическую передачу, датчик углового положения вала антенны и преобразователь угол - код, командный сигнал управления по углу является входом системы и соединен с сигнальным входом микропроцессора, с информационными входами которого соединены выходы преобразователя угол - код, выход рассогласования микропроцессора соединен через силовой блок управления двигателя с обмоткой управления шагового двигателя, а выход шины управления микропроцессора - с входом управления преобразователя угол - код, выход шагового двигателя соединен с входом блока волновой механической передачи, являющегося выходом системы для связи с валом антенны, соединенным также с входом СКВТ, выходные обмотки которого соединены со входом преобразователя угол - код.
На чертеже показана структурная схема системы, на которой изображены:
1 - микропроцессор (МП), 2 - силовой блок управления шаговым двигателем (СБУ), 3 - шаговый двигатель (ШД), 4 - блок волновой механической передачи (ВМП), 5 - датчик углового положения вала антенны (синус - косинусный вращающийся трансформатор (СКВТ), 6 - преобразователь угол - код, εвх - входной командный сигнал управления по углу (в цифровом коде), εa - выходные сигналы СКВТ, εц - выходной цифровой код преобразователя угол - код, εц-εвх - разностный сигнал ошибки, Δε - минимальный дискрет (шаг) угла поворота вала антенны.
Выход МП 1 (εц-εвх) соединен через СБУД 2 с управляющей обмоткой ШД 3, выход которого соединен с БВМП 4, выходной вал которой является приводом антенны и выходом устройства, на этом валу находится СКВТ 5, выходные обмотки которого εa соединены с сигнальными входами преобразователя угол - код 6, а его цифровые выходы εц соединены с информационными входами МП 1, шина управления которого соединена с управляющим входом преобразователя угол - код 6.
Указанные схемы представляют собой:
МП 1 - микропроцессор, например типа ВХС196КС, см. каталог фирмы Intel "EMBEDDED MICROCONTROLLERS and PROCESSORS", volumel, 1993г., 17-1;
ШД 3 и силовой блок управления двигателя 2, например типа ДШИ-200-3, см. Петербургский ж. Электроники 2/96, стр. 35-37;
БВМП 4 - см. "Волновые механические передачи", изд. Научно - исследовательский институт по машиностроению, М., 1976 г., МВТУ им. Баумана, стр. 4-18;
СКВТ 5 - синус- косинусный двухканальный трансформатор, например типа СКТД - 64110, см. 6С3.019.057 ТУ, разработки МНПК "Авионика", Москва, ул. Образцова, 13;
Преобразователь угол - код может быть выполнен, например, по А.С. СССР 574740 или может быть выполнен, например, на функционально законченной 561 серии ИМС, программно управляемой микропроцессором.
Система управления приводом антенны работает следующим образом.
Входной сигнал управления εвх поступает на задающий вход МП 1, где сравнивается с сигналом углового положения антенны εц. С выхода МП 1 сигнал рассогласования εц-εвх на вход силового блока управления двигателем 2, где преобразуется по формату до вида, необходимого для управления ШД 3. Шаговый двигатель с дискретностью в один шаг (обычно это 1,8o-3,0o) через блок волновой механической передачи (редуктор) управляет положением вала антенны. Если принять дискретность ШД 3 равной 1,8o, а коэффициент редукции - 100, то минимальная дискретность (шаг) поворота антенны Δε = 0,018°. С валом антенны механически жестко связан датчик угла СКВТ 5, который электрически отрабатывает угловое положение вала антенны. Выходные сигналы СКВТ 5 преобразуются в цифровой код преобразователем 6 угол - код, программно управляемым микропроцессором МП 1 по шине управления. Цифровой код εц (для дискретности Δε = 0,018° достаточен 16-ти разрядный преобразователь), который поступает на сигнальные входы МП 1, где опять сравниваются с εвх и т.д.
Применение шагового двигателя совместно с механической волновой передачей обладает целым рядом преимуществ, а именно:
в шаговом двигателе отсутствуют колебания, следовательно, нет необходимости в стабилизирующих устройствах;
минимальное потребление энергии;
высокий КПД;
большое передаточное отношение, в одной ступени можно получить до 350;
высокая нагрузочная способность при малых массо-габаритных характеристиках;
полное отсутствие люфта на валу антенны.
Кроме того, такое точное управление валом антенны с дискретом 0,018o дает возможность калибровать аналоговый датчик СКВТ с очень высокой точностью по командам МП без сложной и дорогой ручной калибровки и настройки - линеаризации СКВТ. Поскольку калибровка может выполняться оперативно в условиях эксплуатации, то существенно снижается, почти устраняется, влияние систематических ошибок СКВТ. Собственно калибровка производится по отдельной команде (с пульта оператора). При этом задается входное воздействие на вал антенных Δε от 0o до 360o и снимаются выходные напряжения СКВТ 5, преобразуется в цифровой код и заносятся в память МП 1. Таким образом учитываются все систематические ошибки СКВТ.
Калибровка СКВТ 5 происходит следующим образом (сам режим "Калибровка" задается с пульта оператора по отдельной команде, далее по программе и командам с МП1, на фиг.1 условно не показано). По этой команде вначале устанавливается нулевое значение положения вала антенны, а следовательно, и ноль градусов СКВТ 5, затем снимаются выходной 12-разрядный код тангенсной/котангенсной зависимости напряжений синусной и косинусной обмоток преобразователя угол-код 6 плюс 4 разряда значений октантов и выставляются в качестве адреса в энергонезависимой памяти (ЭНЗУ типа флэш-памяти), а в качестве данных в это ЭНЗУ по выставленному адресу записывается математическое (табличное) значение этого нулевого угла в 16-разрядном коде, передаваемого по шине управления с МП1. Затем по команде с МП1 вал антенны поворачивается на один дискрет ШД3 (по часовой стрелке), снова снимаются выходные коды напряжений синусной и косинусной обмоток, выставляются в качестве адреса в ЭНЗУ, а в качестве данных записывается табличное значение уже этого угла в коде и т. д. на весь полный оборот вала антенны. Таким образом, все систематические ошибки СКВТ 5 во всем рабочем диапазоне учтены, т.е. теперь каждому шагу поворота вала антенны соответствуют заранее известные значения напряжений синусной и косинусной обмоток в кодах (с учетом всех ошибок СКВТ и преобразователя 6), следовательно, измерение положения вала антенны происходит с максимальной точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| Система регулирования подачи топлива транспортного дизеля | 1986 |
|
SU1348549A1 |
| Преобразователь кода в угол поворота вала | 1980 |
|
SU942103A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Преобразователь кода в угол поворота вала | 1982 |
|
SU1062747A1 |
| Устройство контроля прочности перемычки | 1990 |
|
SU1798089A1 |
Изобретение относится к системам управления и регулирования и может быть использовано для цифрового регулирования привода антенны метрологического радиолокатора, в системах автоматического регулирования с обратной связью, в частности в позиционных следящих системах. Технический результат заключается в повышении точности. Система содержит микропроцессор, шаговый двигатель, силовой блок управления двигателя, волновую механическую передачу, датчик углового положения вала антенны и преобразователь угол - код, командный сигнал управления по углу является входом системы и соединен с сигнальным входом микропроцессора, с информационными входами которого соединены выходы преобразователя угол - код, выход рассогласования микропроцессора соединен через силовой блок управления двигателя с обмоткой управления шагового двигателя, а выход шины управления микропроцессора - с входом управления преобразователя угол - код, выход шагового двигателя соединен с входом блока волновой механической передачи, являющегося выходом системы для связи с валом антенны, соединенным также с входом СКВТ, выходные обмотки которого соединены со входом преобразователя угол - код. 1 ил.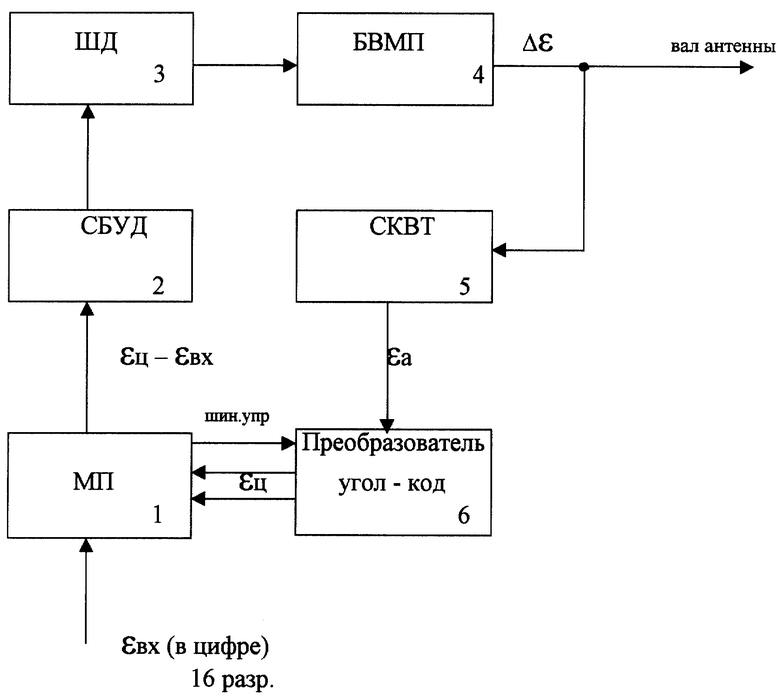
Система управления приводом антенны, содержащая микропроцессор, шаговый двигатель, силовой блок управления двигателя, блок волновой механической передачи, датчик углового положения вала антенны, выполненный в виде СКВТ, и преобразователь выходных сигналов СКВТ в код, вход системы, предназначенный для подачи командного сигнала управления по углу, соединен с сигнальным входом микропроцессора, с информационными входами которого соединены выходы преобразователя выходных сигналов СКВТ в код, выход рассогласования микропроцессора соединен через силовой блок управления двигателя с обмоткой управления шагового двигателя, а выход шины управления микропроцессора - с входом управления преобразователя выходных сигналов СКВТ в код, выход шагового двигателя через блок волновой механической передачи соединен с выходом системы для связи с валом антенны, соединенным также с входом СКВТ, выходные обмотки которого соединены с входом преобразователя выходного сигнала СКВТ в код, причем по командам микропроцессора возможна калибровка СКВТ путем точного управления валом антенны.
| АХМЕТЖАНОВ А.А | |||
| Высокоточные системы передачи угла автоматических устройств | |||
| - М.: Энергия, 1975, с.206, рис.10.4 | |||
| Там же, с.213-214, рис.10-11 | |||
| Волновые механические передачи | |||
| Москва, изд | |||
| НИИ по машиностроению, 1976, МВТУ им.Баумана, с.4-18 | |||
| Устройство для ввода информации | 1991 |
|
SU1800452A1 |
| Преобразователь кода в угол поворота вала | 1982 |
|
SU1062747A1 |
| Цифровая следящая система | 1990 |
|
SU1835533A1 |
| US 4853839 A, 01.08.1989. | |||

