с/
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ СМЕННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1991 |
|
RU2042551C1 |
| Цифровая следящая система | 1983 |
|
SU1149216A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| Устройство стабилизации динамического диапазона сигнала | 1986 |
|
SU1480096A1 |
| Устройство стабилизации амплитуды видеосигнала | 1988 |
|
SU1603538A2 |
| Манипулятор частоты без разрыва фазы | 1987 |
|
SU1515384A1 |
| Устройство для вычисления полиномиальной функции от аналогового аргумента | 1990 |
|
SU1737444A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
Изобретение относится к цифровым системам автоматического управления и регулирования и может быть использовано для управления различными динамическими объектами, выходная координата которых является непрерывной величиной. Целью является повышение- точности в переходном режиме. Система содержит задатчик 1, вычитатель 2, регистр 3, перемножитель 4, цифрраналоговый преобразователь 5, усилитель 6. двигатель 7, преобразователь угол - код 9, редуктор 8, цифровой измеритель скорости 10. сумматор 11, формирователь, импульсов 12, постоянное запоминающее устройство 13, формирователь адреса 14, генератор опорной частоты 15. 1-2-3-4-5- 6-7-8-9-10-11-2, 0-11. 15-10, 15-12.9-12- 12-14-13, 4.12-14.3. Зил.
Изобретение относится к цифровым,ри- стемам автоматического управления и регулирования и может быть использовано для управления различными динамическими объектами, выходная координата которых является непрерывной величиной.
Целью настоящего изобретения является повышение точности системы в переходном режиме.
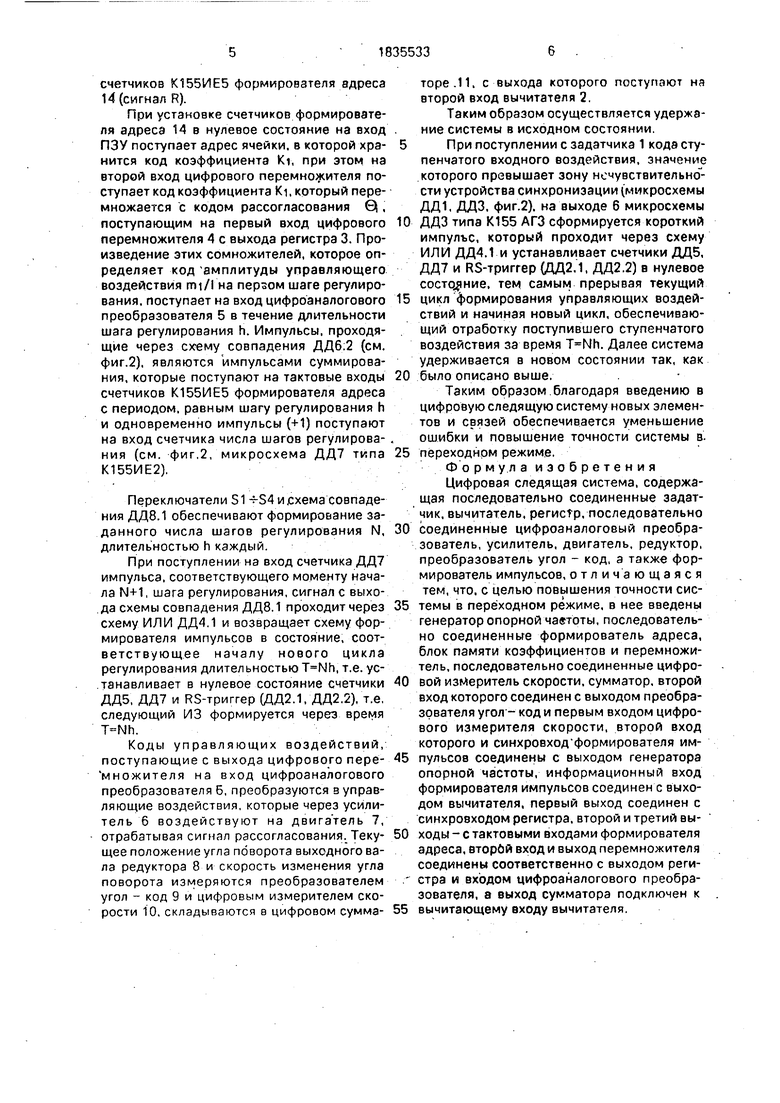
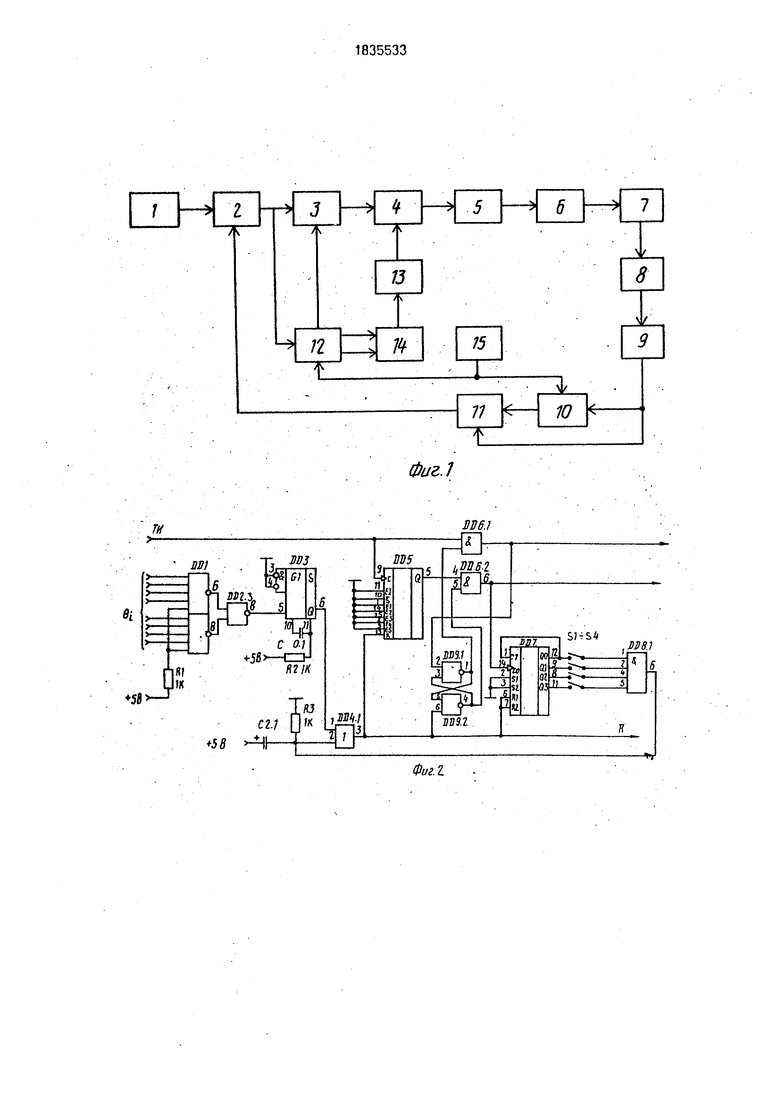
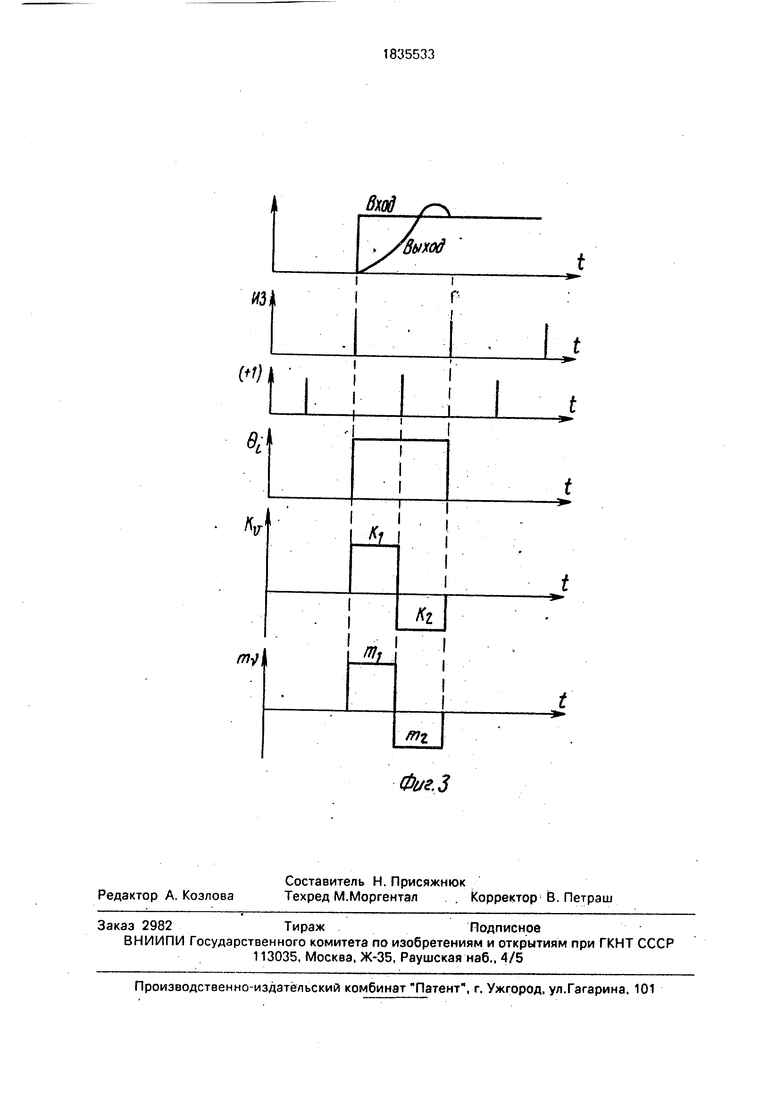
На фиг.1 представлена структурная схема цифровой следящей системы; на фиг.2 - схема одного из вариантов формирователя импульсов управления; на гфиг.З - эпюры, поясняющие работу системы.
, Следящая система содержит последовательно включенные зэдатчик 1. цифровой вычитатель 2, регистр 3. цифровой перемножитель 4, цифроаналоговый преобразователь 5, усилитель 6, двигатель 7, редуктор 8,
преобразователь угол-код 9, цифровой измеритель скорости 10, сумматор, 11, выход которого подключен ко второму входу цифрового вычитателя 2, а второй вход сумматора 11 подключен к выходу преобразователя угол-код 9, причем второй вход цифрового перемножителя 4 подключен к выходу постоянного запоминающего устройства 13, вход которого соединен с выходом формирователя адреса 14, а первый и второй входы формирователя адреса 14 подключены соответственно к первому и второму выходам фОр мирователя импульсов управления 12, третий выход которого подключен к второму входу регистра 3. первый вход формирователя импульсов управления 12 подключен к выходу цифрового вычитателя 2, а второй вход формирователя импульсов управления 12 подключен к выходу генера00
со ел ел со со
тора оперной частоты 15, который подключен также к второму входу цифрового измерителя скорости 10.
В предлагаемой цифровой следящей системе сигнал рассогласования на выходе цифрового вычитателя 2 будет равен нулю, когда выход системы (угол поворота выходного вала редуктора 9) и скорость его изменения равны входу и скорости его изменения, поступающему с задатчика 1. Если сигнал рассогласования ® не равен нулю, то на вход усилителя 7 поступают управляющие воздействия,которые представляют собой периодически повторяющиеся с периодом последовательность из N прямоугольных импульсов длительностью h с амплитудами т , где ,2,...N - номер шага регулирования: Т-длительность одного интервала регулирования; h - шаг квантования .системы, равный длительности одного шага регулирования; N - количество шагов регулирования, равное порядку дифференциального уравнения, которым описывается непрерывная часть системы.
Значения m определяются с помощью метода переменного коэффициента усиления (Ю.Ту. Современная теория управления, - М,: Мир, 1971). Например, для системы, в которой используется двигатель постоянного тока с независимым возбуждением, имеющим передаточную функцию вида
G(s)
а
s (s + Ь)
передаточная функция непрерывной части системы, без.учета квантования по уровню, но с учетом обратной связи.по скорости будет иметь вид
G(s) a(s+d) (S) s ( s + b )
Тогда амплитуды управляющих воздейст- . вий, обеспечивающих отработку скачкообразного входного воздействия при нулевой скорости изменения выхода системы в момент поступления входного воздействия, можно рассчитать последующим формулам:
mi
(3)
ahd (1 -В )
ЬВ a h d (1 - В )
Ц .
где , ©I -значение сигнала рассогласования в момент начала цикла регулирования длительностью .
Выражения (3) для расчета амплитуд управляющих воздействий могут быть представлены в виде
©I ,
где
(4)
Ki
К2
ahd(1 -В)
b В ahd(1 -B )
15
20
25
30
35
40
45
55
50
постоянные коэффициенты, зависящие только от параметров передаточной функции непрерывной части системы, которые могут быть рассчитаны заранее и храниться в постоянном запоминающем устройстве.
В предлагаемой системе для хранения коэффициентов Kp(v- 1,2N) используется постоянное запоминающее устройство 13 (см. фиг.1), а выражения (4) реализуются с помощью цифрового перемножителя 4, на первый вход которого поступает код рассогт. ласования О, с выхода регистра 3, а на второй вход цифрового перемножителя 4 с выхода ПЗУ 13 поступают коды коэффици-. ентов К. Адреса ячеек ПЗУ, в которых хранятся коды коэффициентов Кл для каждого шага регулирования, поступают на вход ПЗУ с формирователя адреса.
Цифровая следящая система работает следующим образом.
При включении питания счетчики ДД5, ДД7и НЗ-триггер{ДД2.1, ДД2.2)(см. фиг.2) устанавливаются в нулевое состояние, при этом разрешается прохождение тактовых импульсов ТИ от генератора опорной частоты 14 (фиг.1) через схему совпадения ДД6.1.
Первый же тактовый импульс, прошедший чер ез схему совпадения ДД6.1, опрокидывает RS-триггер (ДД2.1, ДД2.2), тем самым запрещается прохождение через ДД6.1 последующих тактовых импульсов, но разрешается прохождение через схему совпадения ДД6.2 импульсов с выхода счетчика ДД5, период следования которых равен h.
Тактовый импульс, прошедший через схему совпадения ДД6.1, является импульсом записи (ИЗ), который поступает на второй вход (см.фиг.1) регистра 3 и обеспечивает запись в регистр кода рассогласования 0| . которое хранится в регистре в течение всего интервала регулирования . Импульс установки в нулевое состояние счетчиков ДД5 и ДДб поступает также на входы установки в нулевое состояние
счетчиков К155ИЕ5 формирователя адреса 14 (сигнал R).
При установке счетчиков формирователя адреса 14 в нулевое состояние на вход ПЗУ поступает адрес ячейки, в которой хра- нится код коэффициента Кг, при этом на второй вход цифрового перемножителя поступает код коэффициента KI , который перемножается с кодом рассогласования Q , поступающим на первый вход цифрового перемножителя 4 с выхода регистра 3. Произведение этих сомножителей, которое определяет код амплитуды управляющего воздействия mi/I на перзом шаге регулирования, поступает на вход цифроаналогового преобразователя 5 в течение длительности шага регулирования h. Импульсы, проходящие через схему совпадения ДД6:2 (см. фиг.2), являются импульсами суммирования, которые поступают на тактовые входы счетчиков К155ИЕ5 формирователя адреса с периодом, равным шагу регулирования h и одновременно импульсы (+1) поступают на вход счетчика числа шагов регулирова- ния (см. фиг.2, микросхема ДД7 типа К155ИЕ2).
Переключатели S1 -rS4 и схема совпадения ДД8.1 обеспечивают формирование заданного числа шагов регулирования N, длительностью h каждый.
При поступлении на вход счетчика ДД7 импульса, соответствующего моменту начала N+1, шага регулирования, сигнал с выхо- . да схемы совпадения ДД8.1 проходит через схему ИЛИ ДД4.1 и возвращает схему формирователя импульсов в состояние, соответствующее началу нового цикла регулирования длительностью , т.е. устанавливает в нулевое состояние счетчики ДД5. ДД7 и RS-триггер (ДД2.1, ДД2.2), т.е. следующий ИЗ формируется через время .
Коды управляющих воздействий, поступающие с выхода цифрового пере- множителя на вход цифроаналогового преобразователя б, преобразуются в управляющие воздействия, которые через усилитель 6 воздействуют на двигатель 7, отрабатывая сигнал рассогласования. Теку- щее положение угла поворота выходного вала редуктора 8 и скорость изменения угла поворота измеряются преобразователем угол - код 9 и цифровым измерителем скорости 10, складываются в цифровом сумма-
торе.11, с выхода которого поступают на второй вход вычитателя 2.
Таким образом осуществляется удержание системы в исходном состоянии.
При поступлении с задатчика 1 кода ступенчатого входного воздействия, значение которого превышает зону нечувствительности устройства синхронизации(микросхемы ДД1, ДДЗ, фиг.2). на выходе б микросхемы ДДЗ типа К155 АГЗ сформируется короткий импулъс, который проходит через схему ИЛИ ДД4.1 и устанавливает счетчики ДД5, ДД7 и RS-триггер (ДД2.1, ДД2.2) в нулевое состояние, тем самым прерывая текущий цикл формирования управляющих воздействий и начиная новый цикл, обеспечивающий отработку поступившего ступенчатого воздействия за время . Далее система удерживается в новом состоянии так, как было описано выше.
Таким образом благодаря введению в цифровую следящую систему новых элементов и связей обеспечивается уменьшение ошибки и повышение точности системы в. переходном режиме.
Форм у л а изобретения
Цифровая следящая система, содержащая последовательно соединенные задат- чик. вычитатель, регистр, последовательно соединенные цифроаналоговый преобразователь, усилитель, двигатель, редуктор, преобразователь угол - код, а также формирователь импульсов, отличающаяся тем, что. с целью повышения точности системы в переходном режиме, в нее введены генератор опорной частоты, последовательно соединенные формирователь адреса, блок памяти коэффициентов и перемножитель, последовательно соединенные цифровой измеритель скорости, сумматор, второй вход которого соединен с выходом преобразователя угол - код и первым входом цифрового измерителя скорости, второй вход которого и синхровход формирователя импульсов соединены с выходом генератора опорной частоты, информационный вход формирователя импульсов соединен с выходом вычитателя, первый выход соединен с синхровходом регистра, второй и третий выходы - с тактовыми входами формирователя адреса, второй вход и выход перемножителя соединены соответственно с выходом регистра и входом цифроаналогового преобразователя, а выход сумматора подключен к вычитающему входу вычитателя.
п
т
$03
tlr
H-
.ifr t;
с а/
4-Jfi C H
Л2М
58
Фиг.1
as 6.1
9п tW
т1Ж1Ґ тет
,ки
fin
. W
SHS
,«;
aii-iJ. 6
/77V
/fa V
t
L
| Цифровая следящая система | 1987 |
|
SU1441348A1 |
| Цифровая следящая система | 1983 |
|
SU1149216A1 |
| Голографическое устройство | 1983 |
|
SU1149206A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
