Изобретение относится к управлению электрическими машинами и может быть использовано при изготовлении и эксплуатации шаговых двигателей,
Цель изобретения состоит в сокращении времени измерения ошибок позиционирования.
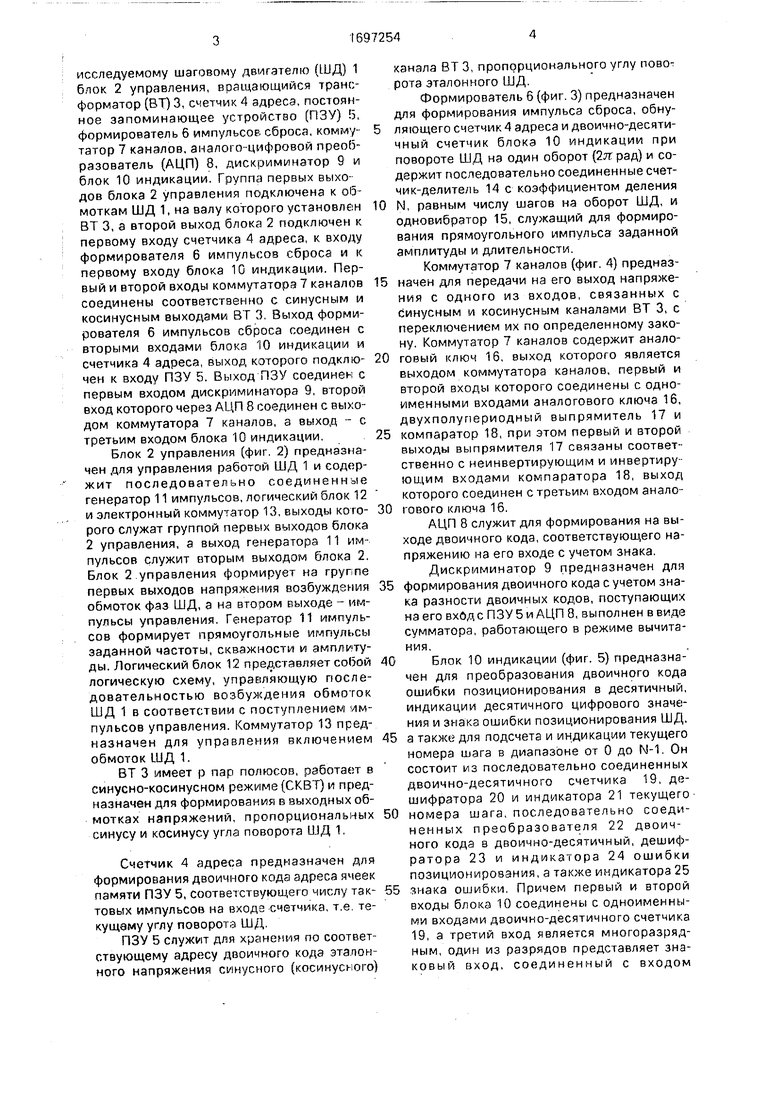
На фиг. 1 представлена структурная электрическая схема устройства; на фиг, 2-5 - структурные схемы соответственно блока управления, формирователя импульсов сброса, коммутатора каналов и блока индикации; на фиг. 6 изображены временные диаграммы соответственно на втором выходе и группе первых выводов блока управления; на фиг 7 - эпюры напряжений на синусном и косинусном выходах вращающегося трансформатора, на первом и втором входах компаратора, входящего в коммутатор каналов, на выходе компаратора и на выходе коммутатора каналов.
Устройство для измерения ошибок позиционирования шагового электродвигателя (фиг. 1) содержит подключенный к
исследуемому шаговому двигателю (ШД) 1 блок 2 управления, вращающийся трансформатор (ВТ) 3, счетчик 4 адреса, постоянное запоминающее устройство (ПЗУ) 5, формирователь 6 импульсов сброса, коммутатор 7 каналов, аналого-цифровой преобразователь (АЦП) 8, дискриминатор 9 и блок 10 индикации. Группа первых выходов блока 2 управления подключена к обмоткам ШД 1, на валу которого установлен ВТ 3, а второй выход блока 2 подключен к первому входу счетчика 4 адреса, к входу формирователя 6 импульсов сброса и к первому входу блока 10 индикации. Первый и второй входы коммутатора 7 каналов соединены соответственно с синусным и косинусным выходами ВТ 3. Выход формирователя 6 импульсов сброса соединен с вторыми входами блока 10 индикации и счетчика 4 адреса, выход которого подключен к входу ПЗУ 5. Выход ПЗУ соединен с первым входом дискриминатора 9, второй вход которого через АЦП 8 соединен с выходом коммутатора 7 каналов, а выход - с третьим входом блока 10 индикации.
Блок 2 управления (фиг. 2) предназначен для управления работой ШД 1 и содержит последовательно соединенные генератор 11 импульсов, логический блок 12 и электронный коммутатор 13, выходы которого служат группой первых выходов блока 2 управления, а выход генератора 11 импульсов служит вторым выходом блока 2. Блок 2 управления формирует на группе первых выходов напряжения возбуждения обмоток фаз ШД, а на втором выходе - импульсы управления. Генератор 11 импульсов формирует прямоугольные импульсы заданной частоты, скважности и амплитуды. Логический блок 12 представляет собой логическую схему, управляющую последовательностью возбуждения обмоток ШД 1 в соответствии с поступлением импульсов управления. Коммутатор 13 предназначен для управления включением обмоток ШД 1.
ВТ 3 имеет р пар полюсов, работает в синусно-косинусном режиме (СКВТ) и предназначен для формирования в выходных обмотках напряжений, пропорциональных синусу и косинусу угла поворота ШД 1.
Счетчик 4 адреса предназначен для формирования двоичного кода адреса ячеек памяти ПЗУ 5, соответствующего числу тактовых импульсов на входе счетчика, т.е. текущему углу поворота ШД.
ПЗУ 5 служит для хранения по соответствующему адресу двоичного кода эталонного напряжения синусного (косинусного)
канала ВТЗ, пропорционального углу поворота эталонного ШД.
Формирователь 6 (фиг. 3) предназначен для формирования импульса сброса, обнуляющего счетчик 4 адреса и двоично-десяти- чный счетчик блока 10 индикации при повороте ШД на один оборот (2гг рад) и содержит последовательно соединенные счетчик-делитель 14 с коэффициентом деления
0 N, равным числу шагов на оборот ШД, и одновибратор 15, служащий для формирования прямоугольного импульса заданной амплитуды и длительности.
Коммутатор 7 каналов (фиг. 4) предназ5 начен для передачи на его выход напряжения с одного из входов, связанных с синусным и косинусным каналами ВТ 3, с переключением их по определенному закону. Коммутатор 7 каналов содержит анало0 говый ключ 16, выход которого является выходом коммутатора каналов, первый и второй входы которого соединены с одноименными входами аналогового ключа 16, двухполупериодный выпрямитель 17 и
5 компаратор 18, при этом первый и второй выходы выпрямителя 17 связаны соответственно с неинвертирующим и инвертирующим входами компаратора 18, выход которого соединен с третьим входом анало0 гового ключа 16.
АЦП 8 служит для формирования на выходе двоичного кода, соответствующего напряжению на его входе с учетом знака. Дискриминатор 9 предназначен для
5 формирования двоичного кода с учетом знака разности двоичных кодов, поступающих на его вход с ПЗУ 5 и АЦП 8, выполнен в виде сумматора, работающего в режиме вычитания.
0Блок 10 индикации (фиг. 5) предназначен для преобразования двоичного кода ошибки позиционирования в десятичный, индикации десятичного цифрового значения и знака ошибки позиционирования ШД,
5 а также для подсчета и индикации текущего номера шага в диапазоне от 0 до N-1. Он состоит из последовательно соединенных двоично-десятичного счетчика 19, дешифратора 20 и индикатора 21 текущего
0 номера шага, последовательно соединенных преобразователя 22 двоичного кода в двоично-десятичный, дешифратора 23 и индикатора 24 ошибки позиционирования, а также индикатора 25
5 знака ошибки. Причем первый и второй входы блока 10 соединены с одноименными входами двоично-десятичного счетчика 19, а третий вход является многоразрядным, один из разрядов представляет знаковый вход, соединенный с входом
индикатора 25. а остальные соединены Ј преобразователем 22. Счетчик 19 предназначен для формирования на выходе двоич- но-десятичнсго кода, пропорционального числу импульсов управления на входе. Преобразователь 22 предназначен для формирования из двоичного кода двоично-десятичного. Дешифраторы 20 и 23 служат для преобразования двоично-десятичного кода на входе в код управления семисегментны- ми светодиодными индикаторами 21 и 24, отражающими десятичные цифровые значения соответственно текущего номера шага и ошибки позиционирования ШД. Индикатор 25 знака ошибки позиционирования представляет собой светодиод, свечение которого свидетельствует об отрицательном знаке ошибки, а отсутствие свечение - о положительном знаке ошибки.
Устройство работает следующим образом.
Генератор 11 импульсов блока 2 управления формирует на своем выходе (втором выходе блока 2) заданное число импульсов управления (фиг.ба), под воздействием каждого из которых на выходе логического блока 12 устанавливается (гп-1)-разрядный двоичный код (т - число фаз ШД), определяющий порядок включения обмоток фаз ШД 1. Например, для соответствующей схемы включения обмоток формируется двоичный код, при котором с приходом каждого импульса управления поочередно возбуждается каждая из m фаз, т.е. 1-2-3...т-1-2 и т.д. Под управлением этого кода в коммутаторе 13 формируются импульсы напряжения, необходимые для возбуждения соответствующих фаз двигателя и поворота его на очередной шаг (фиг. 66). От коммутатора 13 импульсы напряжения через группу первых выходов блока 2 управления подаются на обмотки фаз ШД 1, вызывая поворот его ротора на угол
Ор п аэ + Ј Д«п где Ob 2 ж/N -эталонный угол шага ШД, рад;
N - число шагов на оборот ШД;
п - заданное число шагов;
Дал - погрешность отработки n-го шага, рад.
На такой же угол поворачивается механически закрепленный на валу ШД 1 ротор ВТ 3, в выходных обмотках которого формируются при этом напряжения Ui и U2. пропорциональные соответственно синусу и косинусу угла «р (фиг. 7а). С выхода ВТ 3
напряжения Ui и U поступают соответственно на первый и второй входы коммутатора 7 каналов, а внутри него на одноименные входы аналогового ключа 16
и двухполупериодного выпрямителя 17, на первом и втором выходах которого формируются выпрямленные напряжения синусоиды 1)з и косинусоиды U4 (фиг. 76), поступающие соответственно на неинвертирующий и инвертирующий входы компаратора 18, в котором сравниваются текущие амплитуды этих сигналов, и при условии isinap I |cos Op I на выходе компаратора 18 вырабатываются прямоугольные импульсы 1)5 положительной полярности (фиг.7в), которые подаются на третий вход управления аналоговым ключом 16. При наличии прямоугольного импульса на третьем входе аналоговый ключ 16 подключаёт к своему выходу второй вход, а при отсутствии - первый вход. Таким образом, на выход аналогового ключа 16, а следовательно, и на выход коммутатора 7 каналов всегда поступает напряжение того канала ВТ 3, абсолютное значение амплитуды которого в этот момент меньше фиг. 7г). При этом с изменением угла поворота ШД 1 (и ВТ 3) крутизна выходного сигнала Ue коммутатора 7 каналов остается практически неизменной, что уменьшает погрешность, вносимую самим ВТ в измерение ошибки позиционирования. С выхода коммутатора 7 каналов напряжение поступает на АЦП 8, где формируется двоичный код,
соответствующий текущей амплитуде Ue и, следовательно, углу поворота ар ротора ШД 1, который далее подается на вторую группу входов дискриминатора 9.
Заданное число импульсов управления
с второго выхода блока 2 управления поступает одновременно на первый вход счетчика 4 адреса и вход формирователя 6 импульсов сброса. Счетчик 4 адреса подсчитывает число импульсов управления на
входе и формирует на выходе соответствующий двоичный код, поступающий на адресные входы ПЗУ 5, в ячейках памяти которого по адресам с нулевого по N-1 предварительно записаны двоичные коды
эталонного напряжения синусного (косинусного) каналов ВТ 3, пропорционального углу ап п «э поворота эталонного ШД, под которым понимается двигатель, имеющий аналогичное с исследуемым ШД 1 конструктивное исполнение и нулевую погрешность отработки шага. При этом для углов аг„ лежащих в первом, четвертом пятом и восьмом октантах, в ПЗУ записаны двоичные коды эталонного напряженна синусного канала ВТ 3, а для «п. лежащих во втором, третьем, шестом и седьмом октантах, - косинусного канала Двоичный код эталонного напряжения из ячейки памяти ПЗУ 5, адрес которой определен счетчиком 4 адреса, поступает на выход ПЗУ, а с него на первую группу входов дискриминатора 9. В дискриминаторе, представляющем собой сумматор, работающий в режиме вычитания, производится вычитание двоичных кодов напряжения ВТ 3, соответствующих заданному углу поворота эталонного и исследуемого ШД, т.е. формируются сигнал в виде двоичного кода, пропорционального ошибке позиционирования
п
Л«п ар - ап 2 Лап/и логический уроо
вень, определяющий знак ошибки, которые поступают соответственно на вход преобразователя 22 двоичного кода в двоично-десятичный и на вход индикатора 25. Двоично-десятичный код ошибки с преобразователя 22 подается на дешифратор 23, в котором трансформируется в код управления семисегментным индикатором 24, отражающим десятичное значение выходного двоичного кода дискриминатора 9, пропорционального ошибке позиционирования Лап ШД 1, при отработке им заданного числа шагов. Один из сигналов третьей группы входов блока 10 индикации подается на вход индикатора 25 знака ошибки позиционирования - светодиода, свечение которого при наличии высокого уровня на входе свидетельствует об отрицательном знаке ошибки Дап, а отсутствие свечения при низком уровне входного напряжения - о ее положительном знаке.
С второго выхода блока 2 управления заданное число импульсов управления поступает на счетный вход двоично-десятичного счетчика 19 через первый вход блока 10 индикации. Счетчик 19 формирует на выходе двоично-десятичный код, соответствующий числу импульсов на входе (числу шагов ШД 1), который преобразуется дешифратором 20 в код управления семисегментным индикатором 21, отражающим десятичное значение текущего номера шага ШД 1 в диапазоне от 0 до N-1.
В формирователе б импульсов сброса, тактируемом импульсами управления с второго выхода блока 2 управления, делитель 14 с коэффициентом деления N подсчитывает число входных импульсов и с приходом каждого N-ro импульса управления вырабатывает на выходе импульс запускающий одновибрзтор 15, который формирует прямоугольный импульс сброса
заданной амплитуды и длительности, обнуляющий счетчик 4 адреса и двоично-десятичный счетчик 19 блока 10 индикации. Таким образом, с приходом N-ro импульса управления ШД 1 совершает полный оборот и приходит в исходное состояние, при этом на выходе счетчика 4 адреса устанавливается двоичный код адреса нулевой ячейки памяти ПЗУ, в котором записан двоичный код
нуля, и на выходе двоично-десятичного счетчика 19 блока 10 индикации также устанавливается нулевой двоичный код, т.е на индикаторе 21 ошибки позиционирования отражается цифра ноль.
Индикация ошибки позиционирования
ШД 1 происходит сразу после отработки им заданного числа шагов и окончания переходного процесса фиксации ротора ШД 1 в новом положении.
По сравнению с прототипом данное устройство для измерения ошибок позиционирования шагового электродвигателя обладает большей производительностью вследствие сокращения времени измерения ошибки позиционирования исследуемого ШД вследствие реализации модели эталонного ШД на средствах интегральной электроники с предварительной записью реакции эталонного двигателя в ПЗУ
и исключения времени на разворот механических средств, имитирующих эталонный ШД, в заданное положение.
Точно ть измерения, обеспечиваемая устройством, определяется главным образом точностными характеристиками применяемого ВТ и может быть обеспечена не ниже, чем у прототипа.
Формула изобретения
Устройство для измерения ошибок позиционирования шагового электродвигателя, содержащее блок управления, группа первых выходов которого предназначена для подключения к обмоткам исследуемого
двигателя, вращающийся трансформатор и блок индикации, первый вход которого подключен к второму выходу блока управления, отличающееся тем, что, с целью сокращения времени измерения, оно снабжено последовательно соединенными счетчиком адреса, постоянным запоминающим устройством и дискриминатором, последовательно соединенными коммутатором каналов и аналого-цифровым преобразователем, а также формирователем импульсов сброса, причем первый вход счетчика адреса соединен с вторым выходом блока управления и входом формирователя импульсов сброса, выход которого подключен к вторым входам счв1мика адреса и блока индикации, третий вход которо-нусный и косинусный выходы вращающего соединен с выходом дискриминатора,гося трансформатора подключены соот- второй вход которого соединен с выходомветственно к первому и второму входам аналого-цифрового преобразователя, а си-коммутатооа кэналов.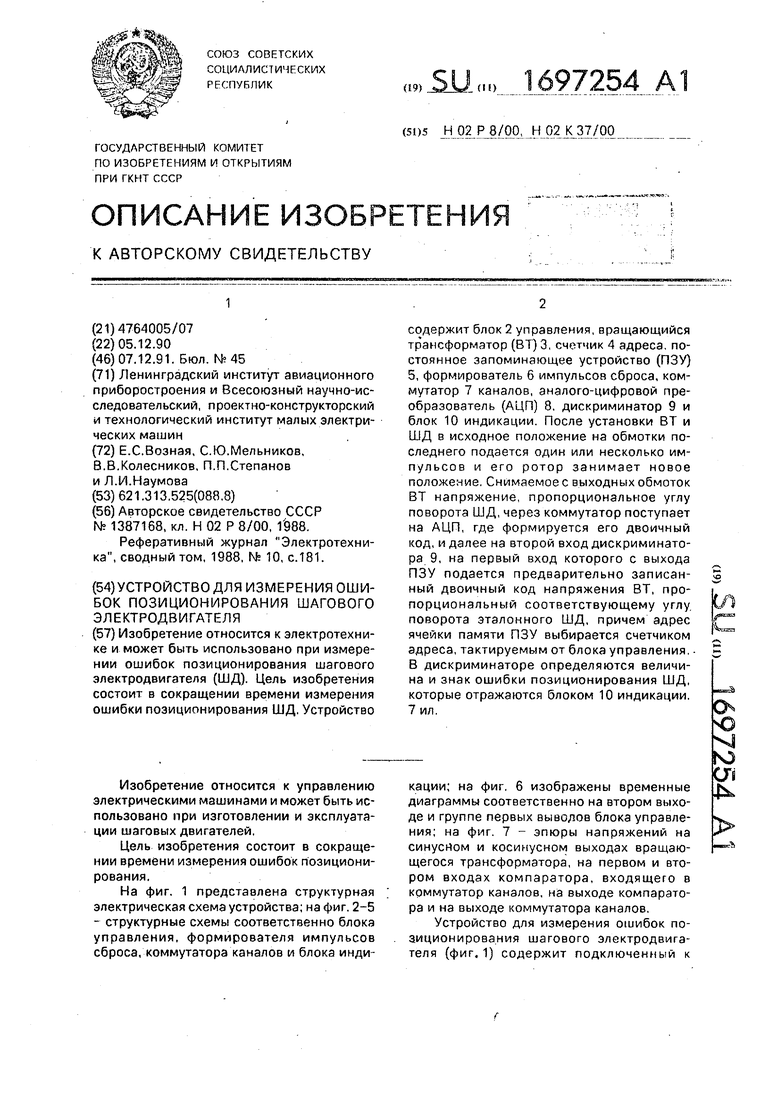


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| ШЕСТИКАНАЛЬНЫЙ ПАРАЛЛЕЛЬНЫЙ КОРРЕЛЯТОР ДЛЯ ПРИЕМНИКОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2144210C1 |
| Многоканальное устройство для измерения температуры | 1990 |
|
SU1791731A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Адаптивный групповой приемник многочастотного кода с импульсно-кодовой модуляцией | 1989 |
|
SU1830632A1 |
| СПОСОБ КОМПЛЕКСНОГО ОПРЕДЕЛЕНИЯ ТЕПЛОФИЗИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2027172C1 |
| Устройство дл коррекции показаний датчика положения нажимных устройств прокатной клети | 1990 |
|
SU1754248A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Многоканальное устройство для измерения температуры | 1989 |
|
SU1672239A1 |


Изобретение относится к электротехнике и может быть использовано при измерении ошибок позиционирования шагового электродвигателя (ШД). Цель изобретения состоит в сокращении времени измерения ошибки позиционирования ШД. Устройство содержит блок 2 управления, вращающийся трансформатор (ВТ) 3, счетчик 4 адреса постоянное запоминающее устройство (ПЗУ) 5, формирователь 6 импульсов сброса, коммутатор 7 каналов, аналого-цифровой преобразователь (АЦП) 8. дискриминатор 9 и блок 10 индикации. После установки ВТ и ШД в исходное положение на обмотки последнего подается один или несколько импульсов и его ротор занимает новое положение Снимаемое с выходных обмоток ВТ напряжение, пропорциональное углу поворота ШД, через коммутатор поступает на АЦП, где формируется его двоичный код, и далее на второй вход дискриминатора 9, на первый вход которого с выхода ПЗУ подается предварительно записанный двоичный код напряжения ВТ, пропорциональный соответствующему углу поворота эталонного ШД, причем адрес ячейки памяти ПЗУ выбирается счетчиком адреса, тактируемым от блока управления В дискриминаторе определяются величина и знак ошибки позиционирования ШД, которые отражаются блоком 10 индикации. 7 ил.
фигЛ
фиг 5
Фиг. 6
Ц
а)
U
4
0
| Устройство для измерения величины шага и статической погрешности обработки шага | 1986 |
|
SU1387168A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реферативный журнал Электротехника, сводный том, 1988, № 10, с.181. | |||
