Изобретение относится к космической технике, в частности к устройствам компенсации микроускорений.
Известно устройство (патент 2021170, Устройство для ориентации космического аппарата/ Оделевский В.К., Сергеев В.Е., Петраков В.М., Вередин B.C., МПК 5 В 64 G 1/00, опубликованный 15.10.94), включающее в себя систему управления и исполнительные органы, включающие двигатель ориентации, баллон с рабочим газом и электроклапан.
Недостатком такого устройства является невозможность регистрации и компенсации малых ускорений из-за низкой чувствительности датчиков и имеющихся утечек воздуха через клапаны, невозможность точной регулировки управляющих моментов и компенсации резких ускорений, зависящих от режимов работы бортового оборудования.
В качестве прототипа выбрано устройство (Коваленко А.П. Магнитные системы управления космическими аппаратами. - М.: Машиностроение, 1975- 248 с.), предназначенное для ориентации КА по магнитному полю Земли (МПЗ), содержащее три катушки, ориентированные по взаимно ортогональным осям, связанным со спутником, создающее магнитные моменты, когда электрический ток протекает по виткам катушек, взаимодействуя с МПЗ.
Недостатком такого устройства является его повышенная масса и сильное магнитное поле, которое может влиять на технологические процессы, протекающие на борту КА.
Задачей изобретения является снижение уровня микроускорений на борту технологического космического аппарата (КА), не влияя на технологические процессы.
Поставленная задача достигается тем, что устройство, содержащее три взаимно перпендикулярных токонесущих контура, согласно изобретению, снабжено трехкомпонентным акселерометром, трехкомпонентным ферро-зондовым датчиком магнитного поля, микропроцессором и управляемым источником, причем акселерометр и феррозондовый датчик соединены со входами микропроцессора, выходы которого соединены со входами управляемого источника тока, выходы которого включены в разрывы токонесущих контуров, расположенных на внешней поверхности КА, а контуры снабжены магнитными экранами.
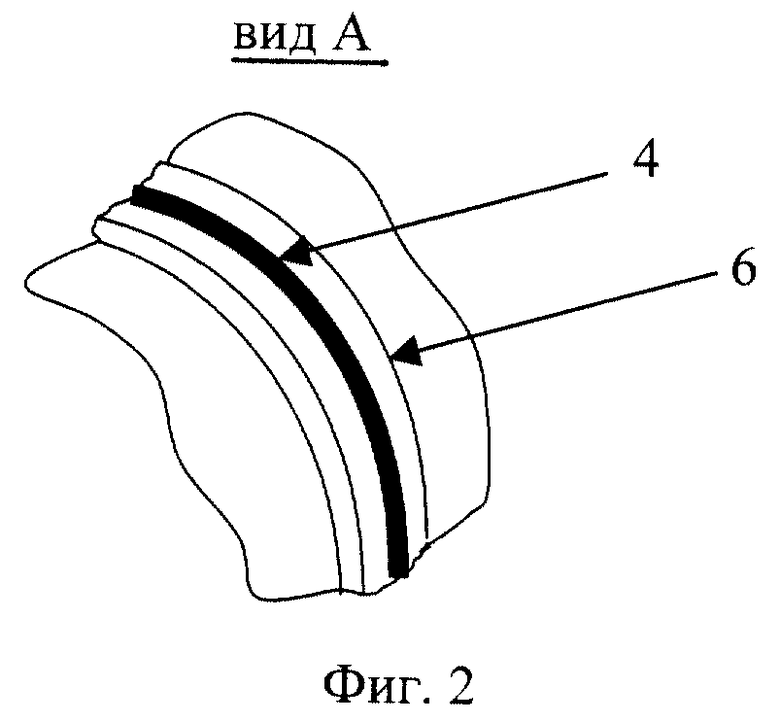
Сущность изобретения поясняется чертежами, где на фиг.1 представлена функциональная схема устройства; на фиг.2 показано расположение магнитных экранов.
Устройство компенсации содержит трехкомпонентный акселерометр 1 (фиг.1), микропроцессор 2, управляемый источник тока 3, токонесущие контуры 4, трехкомпонентный феррозондовый датчик магнитного поля 5 и магнитные экраны 6 (фиг. 2), акселерометр 1 и феррозондовый датчик 5 соединены со входами микропроцессора 2, выходы которого соединены со входами управляемого источника тока 3, выходы которого включены в разрывы токонесущих контуров 4.
Устройство работает следующим способом: с акселерометра 1 снимают информацию о величине и направлении вектора ускорения. С помощью феррозондового датчика 5 измеряют проекции вектора магнитного поля Земли Вх, By, Bz на оси координат. После обработки этой информации микропроцессор 2 вычисляет токи в контурах, требуемые для уменьшения ускорения. Затем микропроцессор подает сигналы управления на источник тока 3, токи с которого поступают в контуры 4.
Для того чтобы уменьшить влияние магнитного поля контуров на технологические процессы на борту КА, под контурами размещены магнитные экраны 6, выполненные в виде ленты из материала с высокой магнитной проницаемостью.
Поясним процесс определения токов в контурах.
Вектор ускорения  , который измеряется акселерометром 1, можно разложить на две составляющие: нормальную
, который измеряется акселерометром 1, можно разложить на две составляющие: нормальную  и тангенциальную
и тангенциальную  . Зная их, можно найти угловые ускорение и скорость:
. Зная их, можно найти угловые ускорение и скорость:
Вращательный магнитный момент, действующий на контур, равен
где  - вектор дипольного магнитного момента; S - площадь контура; I - ток, протекающий по контуру;
- вектор дипольного магнитного момента; S - площадь контура; I - ток, протекающий по контуру;  - единичный вектор, направление которого связано с направлением тока в контуре правилом правого винта.
- единичный вектор, направление которого связано с направлением тока в контуре правилом правого винта.
Примем, что управляющий момент формируют по пропорциональному закону  , где к - коэффициент пропорциональности;
, где к - коэффициент пропорциональности;  - вектор ошибки:
- вектор ошибки:
Здесь кα- коэффициент пропорциональности.
Таким образом, (3) можно переписать в виде:
Решением уравнения (5) можно записать в виде:
Зная угловые скорость и ускорение, вычисляемые на основе сигналов с акселерометра 1 и величины проекций вектора магнитной индукции Вх, By, Вz, определяемые датчиком 5, можно из (4) найти вектор погрешности ориентации  а затем вычислить токи, необходимые для возврата КА в нужное положение.
а затем вычислить токи, необходимые для возврата КА в нужное положение.
где Iх, Iу, Iz - токи в контурах, охватывающих оси OX, OY, OZ соответственно. От знака в правой части равенства зависит направление тока в контуре по правилу правого винта.
Преимуществом разрабатываемого устройства является уменьшение диапазона возникающих на борту микроускорений, при этом возможна точная компенсация как медленно меняющихся ускорений от внешних факторов, так и резких изменений ускорения, связанных с работой бортовой аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТА УТЕЧКИ ВОЗДУХА ИЗ МОДУЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 2000 |
|
RU2189074C2 |
| ЭЛЕКТРОЕМКОСТНЫЙ УРОВНЕМЕР | 2000 |
|
RU2178549C2 |
| ЛОПАТКА ГАЗОВОЙ ТУРБИНЫ | 2000 |
|
RU2178086C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛОПАТОК ТУРБОМАШИН (ВАРИАНТЫ) | 2002 |
|
RU2215986C1 |
| КОНТРОЛЛЕР ДЫМНОСТИ ОТХОДЯЩИХ ГАЗОВ ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 2001 |
|
RU2210759C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА ИНДУКЦИИ МАГНИТНОГО ПОЛЯ В ИОНОСФЕРЕ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169933C2 |
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОРАЗРЯДНОЙ ОБРАБОТКИ ВОЗДУХА В МАЛОРАЗМЕРНЫХ ЗАМКНУТЫХ ОБЪЕМАХ | 1999 |
|
RU2173666C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152590C1 |
| УСИЛИТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 1998 |
|
RU2172060C2 |
Устройство предназначено для использования в космической технике. Устройство содержит три взаимно перпендикулярных токонесущих контура, трехкомпонентный акселерометр, трехкомпонентный феррозондовый датчик магнитного поля, микропроцессор и управляемый источник. Акселерометр и феррозондовый датчик соединены со входами микропроцессора, выходы которого соединены со входами управляемого источника тока, выходы которого включены в разрывы токонесущих контуров, расположенных на внешней поверхности аппарата. Контуры снабжены магнитными экранами. Обеспечивается уменьшение диапазона возникающих на борту микроускорений, при этом возможна точная компенсация как медленно меняющихся ускорений от внешних факторов, так и резких изменений ускорения, связанных с работой бортовой аппаратуры. 2 ил.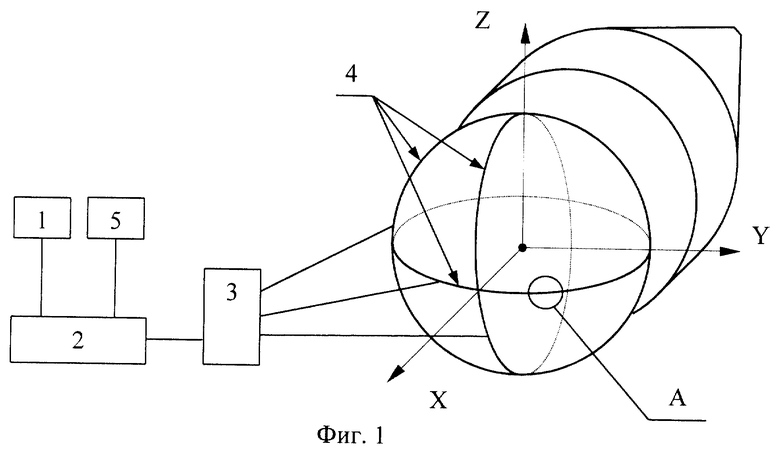
Устройство компенсации микроускорений на борту технологического космического аппарата, содержащее три взаимно перпендикулярных токонесущих контура, отличающееся тем, что оно снабжено трехкомпонентным акселерометром, трехкомпонентным феррозондовым датчиком магнитного поля, микропроцессором и управляемым источником, причем акселерометр и феррозондовый датчик соединены со входами микропроцессора, выходы которого соединены со входами управляемого источника тока, выходы которого включены в разрывы токонесущих контуров, расположенных на внешней поверхности космического аппарата, а контуры снабжены магнитными экранами.
| Коваленко А.П | |||
| Магнитные системы управления космическими аппаратами | |||
| - М.: Машиностроение, 1975, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
| RU 2071034 C1, 27.12.1996 | |||
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| УСТРОЙСТВО для ЦЕНТРИРОВАНИЯ РЕЖУЩЕЙ ГОЛОВКИ ОКОРОЧНОГО СТАНКА | 0 |
|
SU404621A1 |
