Изобретение предназначено для измерения неоднородности лопаточного венца турбомашины, вызванной динамическими деформациями лопаток, и может быть использовано для сигнализации предаварийного состояния лопаток турбомашин в случае появления признаков усталостной прочности или дефектов лопаток, либо для формирования сигнала на отключение двигателя.
Известно устройство для измерения динамической неравномерности параметров лопаточного венца турбомашины ( авторское свидетельство N 391410, МКИ G 01 H 1/08, опубликованное 25.08.1973 г., бюл. N 31), содержащее бесконтактные импульсные датчики, расположенные вблизи периферийных и корневых частей лопаток, связанные с ними формирователи, управляемый генератор, преобразователь сигнала скорости вращения ротора турбомашины в код, блок управления, схему управления генератором, запоминающий блок и ЭВМ.
Недостатком данного устройства является сложность установки большого количества датчиков, как на внешней части корпуса, так и во внутреннем тракте турбомашины, большой объем памяти запоминающего блока, необходимость в ЭВМ для обработки полученной информации.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для индикации поломки лопаток турбомашин (Заблоцкий И.Е. , Коростелев Ю. А. , Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М., Машиностроение, 1977, стр. 94 - 95), содержащее бесконтактный импульсный датчик, установленный в корпусе турбомашины над траекторией движения периферийных торцов лопаток, усилитель, генератор пилообразного напряжения, фильтр, схему сравнения и реле.
Недостатком известного устройства являются его узкие функциональные возможности, принципиально не позволяющие зафиксировать предаварийное состояние лопаток турбомашин и тем самым предотвратить их поломку.
В основу изобретения поставлена задача расширения функциональных возможностей устройства посредством измерения текущих временных интервалов между лопатками в динамическом режиме и сравнения их со средним временным интервалом между лопатками на каждом обороте ротора турбомашины.
Для реализации поставленной цели в известное устройство, содержащее бесконтактный импульсный датчик, установленный в корпусе турбомашины над траекторией движения периферийных торцов лопаток, схему сравнения, согласно изобретению, дополнительно введены формирователь прямоугольных импульсов, вход которого подключен к выходу бесконтактного импульсного датчика, генератор тактовых импульсов, блок управления, вход тактовых импульсов (ВХТИ) которого соединен с выходом генератора, а вход прямоугольных импульсов (ВХПИ) подключен к выходу формирователя прямоугольных импульсов, преобразователь временных интервалов в код, счетный вход которого соединен с выходом тактовых импульсов (ВТИ) блока управления, а вход "запись" установочного кода подключен к выходу установочной записи (ВУЗ) блока управления, сумматор цифровых кодов, соответствующих текущим временным интервалам между лопатками, цифровые входы которого соединены соответственно с цифровыми выходами преобразователя временных интервалов, управляющий вход сумматора "суммирование" подключен к выходу управления суммированием (ВУС) блока управления, а вход "обнуление" сумматора соединен с выходом управления обнулением (ВУО) блока управления, делитель суммарного кода на фиксированное число, соответствующее количеству лопаток в колесе турбомашины, цифровые входы которого подключены, соответственно, к цифровым выходам сумматора, управляющий вход делителя "деление" подключен к выходу управления делением (ВУД) блока управления, блок вычисления разности, первые цифровые входы которого соединены, соответственно, с цифровыми выходами преобразователя временных интервалов, вторые цифровые входы подключены, соответственно, к цифровым выходам делителя суммарного кода, а управляющий вход "вычитание" подключен к выходу управления вычитанием (ВУВ) блока управления, формирователь предаварийного кода, соответствующего предаварийному уровню деформаций лопаток, цифровые входы которого подключены, соответственно, к цифровым выходам делителя, а управляющий вход "деление" соединен с выходом управления обнулением (ВУО) блока управления, цифровые выходы формирователя предаварийного кода соединены, соответственно, с первыми цифровыми входами схемы сравнения, а вторые цифровые входы схемы сравнения подключены, соответственно, к цифровым выходам блока вычисления разности, выход схемы сравнения является выходом устройства.
Предлагаемое техническое решение обладает новизной, так как автору не известны устройства, содержащие признаки, фигурирующие в предлагаемом изобретении в качестве отличительных.
Расширение функциональных возможностей заключается не только в индикации поломки лопаток, но и в возможности предупреждения появления несанкционированного режима работы лопаток и достигается сравнением измеренных текущих временных интервалов между лопатками со средним значением временного интервала между лопатками на каждом периоде вращения ротора турбомашины.
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства; на фиг. 2 - вариант реализации блока управления; на фиг. 3 - эпюры, поясняющие работу устройства.
Сигнализатор предаварийных деформаций лопаток (фиг. 1) содержит бесконтактный импульсный датчик 1, установленный в корпусе 2 турбомашины над траекторией движения периферийных торцов лопаток, формирователь 3 прямоугольных импульсов, подключенный к выходу бесконтактного импульсного датчика 1, генератор 4 тактовых импульсов, блок 5 управления, вход ВХТИ которого соединен с выходом генератора 4, а вход ВХПИ подключен к выходу формирователя 3 прямоугольных импульсов, преобразователь 6 временных интервалов в код, счетный вход которого соединен с выходом ВТИ блока 5 управления, а вход "запись" установочного кода подключен к выходу ВУЗ блока 5 управления, сумматор 7 цифровых кодов, соответствующих текущим временным интервалам между лопатками, цифровые входы которого соединены, соответственно, с цифровыми выходами преобразователя 6 временных интервалов, управляющий вход "суммирование" сумматора 7 подключен к выходу ВУС блока 5 управления, а управляющий вход "обнуление" сумматора 7 соединен с выходом ВУО блока 5 управления, делитель 8 суммарного кода на фиксированное число, соответствующее количеству лопаток в колесе турбомашины, цифровые входы которого подключены, соответственно, к цифровым выходам сумматора 7, а управляющий вход "деление" делителя 8 соединен с выходом ВУД блока 5 управления, блок 9 вычисления разности, первые цифровые входы которого подключены, соответственно, к цифровым выходам преобразователя 6 временных интервалов, вторые цифровые входы соединены, соответственно, с цифровыми выходами делителя 8, а управляющий вход "вычитание" подключен к выходу ВУВ блока 5 управления, формирователь 10 предаварийного кода, соответствующего предавариийному уровню деформаций лопаток, цифровые входы которого подключены, соответственно, к цифровым выходам делителя 8, а управляющий вход "деление" соединен с выходом ВУО блока 5 управления, цифровые выходы формирователя 10 предаварийного кода соединены, соответственно, с первыми цифровыми входами схемы 11 сравнения, а вторые цифровые входы схемы 11 сравнения подключены, соответственно, к цифровым выходам блока 9 вычисления разности, выход схемы 11 сравнения является выходом устройства.
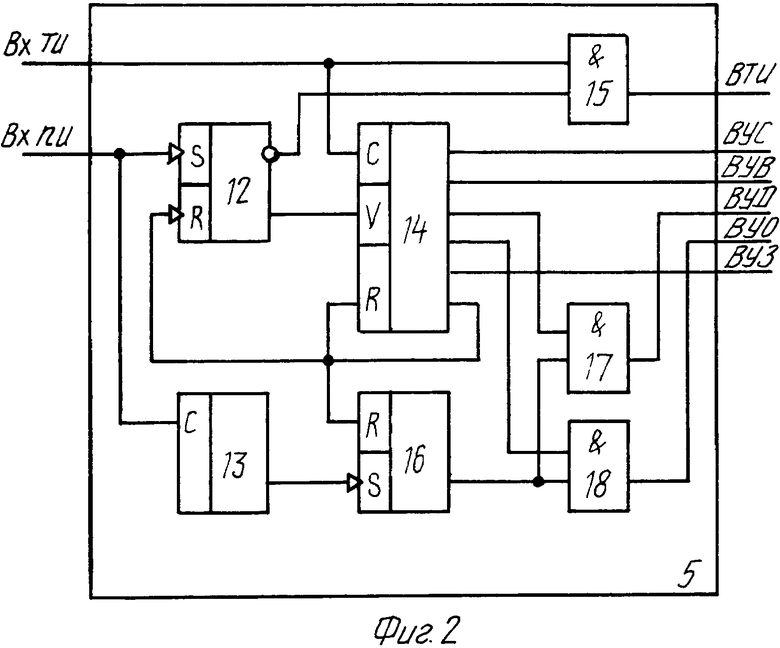
Блок 5 управления, один из вариантов которого приведен на фиг. 2, содержит RS-триггер 12, вход установки "S" которого является входом ВХПИ блока 5 управления, двоичный счетчик 13, счетный вход которого подключен ко входу ВХПИ блока 5 управления, сдвиговый регистр 14, тактовый вход "C" которого является входом ВХТИ блока 5 управления, а его управляющий вход "V" подключен к прямому выходу RS-триггера 12, первый выход сдвигового регистра 14 является выходом ВУС блока 5 управления, второй и пятый выходы сдвигового регистра являются, соответственно, выходами ВУВ и ВУЗ блока 5 управления, логическую схему "И" 15, один из входов которой подключен ко входу ВХТИ блока 5 управления, а второй вход соединен с инверсным выходом RS-триггера 12, выход логической схемы "И" 15 является выходом ВТИ блока 5 управления, RS-триггер 16, установочный вход "S" которого соединен с выходом "переноса" счетчика 13, логическую схему "И" 17, первый вход которой подключен к третьему выходу сдвигового регистра, а второй вход соединен с прямым выходом RS-триггера 16, выход логической схемы "И" 17 является выходом ВУД блока 5 управления, логическую схему "И" 18, первый вход которой соединен с четвертым выходом сдвигового регистра 14, а второй вход подключен к прямому выходу RS-триггера 16, выход логической схемы "И" 18 является выходом ВУО блока 5 управления, шестой выход сдвигового регистра 14 подключен к установочным входам "R", соответственно, RS-триггера 12, RS-триггера 16 и сдвигового регистра 14.
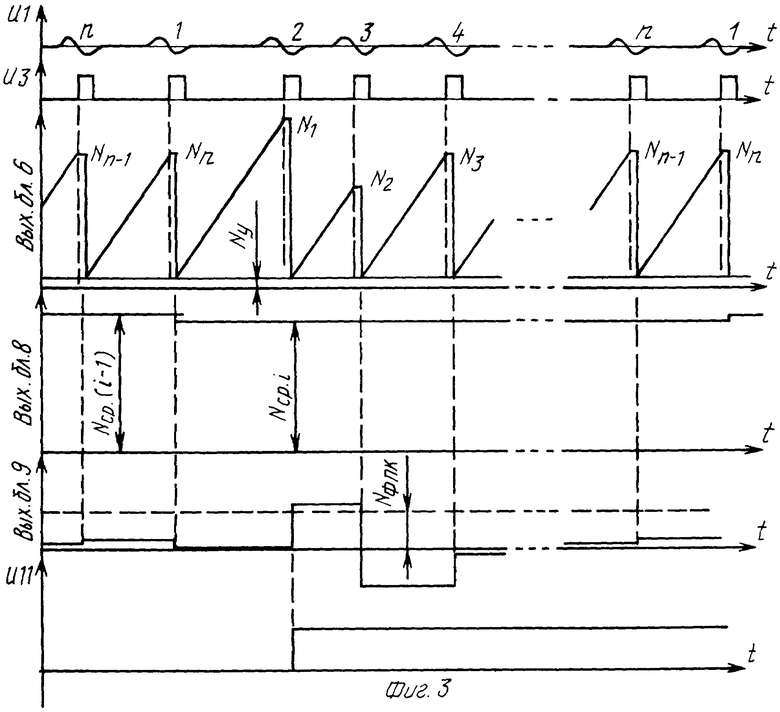
Сигнализатор предаварийных деформаций лопаток турбомашин работает следующим образом. Бесконтактный импульсный датчик 1, например, индукционного типа, установленный в корпусе 2 турбомашины над траекторией движения периферийных торцов лопаток, генерирует знакопеременные аналоговые импульсы (фиг. 3, u1), момент перехода через ноль которых соответствует моменту совпадения оси датчика и лопатки (Заболоцкий И.Е., Коростелев Ю.А., Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М., Машиностроение, 1977, стр. 57). Знакопеременные электрические сигналы поступают на вход формирователя 3 прямоугольных импульсов, представляющего собой разновидность аналогового компаратора, который формирует прямоугольные импульсы (фиг. 3, u3) таким образом, что их передний фронт соответствует моменту перехода через ноль сигналов бесконтактного импульсного датчика 1. Далее, сформированные таким образом прямоугольные импульсы, поступают на вход ВХПИ блока 5 управления (фиг. 1), а на его вход ВХТИ приходят тактовые импульсы с генератора 4. По входу ВХПИ и блоке 5 управления передним фронтом прямоугольного импульса, соответствующего, условно, первой лопатке (фиг. 3, u3), RS-триггер 12 (фиг. 2) устанавливается в единичное состояние, после этого логический "0" с инверсного выхода RS-триггера 12, действующий на втором входе логической схемы "И" 15 запрещает прохождение тактовых импульсов с генератора 4 (фиг. 1) на выход ВТИ блока 5 управления и тем самым останавливает работу преобразователя 6 временных интервалов. При этом на выходе преобразователя 6 временных интервалов устанавливается цифровой код "Nn" (фиг. 3, вых. бл. 6), соответствующий последнему измеренному временному интервалу между лопатками в колесе турбомашины. Прямоугольный импульс от первой лопатки, со входа ВХПИ блока 5 управления, также действует на счетный вход "C" двоичного счетчика 13, емкость которого выбрана равной количеству лопаток, например "n", в контролируемом колесе турбомашины, поэтому с приходом очередного прямоугольного импульса от первой лопатки заканчивается предыдущий период вращения ротора турбомашины и счетчик 13 автоматически обнуляется, сигнал обнуления (переноса в старший разряд) устанавливает по входу "S" RS-триггер 16 в единичное состояние. Логическая "1" с прямого выхода RS-триггера 12, действующая на входе управления "V" сдвигового регистра 14 - разрешает его работу, и первый импульс тактового генератора 4, действующий по входу "C" сдвигового регистра 14, устанавливает на его первом выходе (фиг. 2) уровень логической "1", которая через выход ВУС блока 5 управления действует на управляющий вход "суммирование" сумматора 7 и является командой на прибавление последнего "Nn" цифрового кода преобразователя 6 временных интервалов к существующему в сумматоре 7 коду. Таким образом в сумматоре 7 происходит сложение цифровых кодов всех временных интервалов между лопатками, длительность которых определяется динамическим положением их торцов. Второй импульс тактового генератора 4, действующий по входу "C" сдвигового регистра 14, перемещает логическую "1" с его первого выхода на второй и через выход ВУВ блока 5 управления этот сигнал поступает на управляющий вход "вычитание" блока 9 вычисления разности между цифровым кодом очередного измеренного временного интервала и цифровым кодом с делителя 8, который соответствует среднему временному интервалу между лопатками на предыдущем обороте ротора. Третий импульс тактового генератора 4 перемещает логическую "1" со второго на третий выход сдвигового регистра 14, которая поступает на первый вход логической схемы "И" 17, а на ее втором входе действует уровень логической "1" с прямого выхода RS-триггера 16, поэтому на время совпадения логических "1" - единичный уровень с выхода "И" 17 через выход ВУД блока 5 управления поступает на управляющий вход "деление" делителя 8, в результате чего суммарный цифровой код:
N = N1 + N2 + ... + Nn,
соответствующий сумме временных интервалов между всеми лопатками в колесе на одном периоде вращения ротора, и в первом приближении, равный периоду вращения ротора турбомашины, делится на число "n", равное количеству лопаток в колесе, после чего на выходе делителя 8 устанавливается цифровой код
Nср.i = N/n,
который (фиг. 3, вых. бл. 8) будет определять среднее значение временного интервала между лопатками в колесе на пройденном обороте ротора. Таким образом, выходной цифровой код делителя 8 обновляется один раз за оборот ротора турбомашины, а именно, в начале каждого оборота. Четвертый импульс тактового генератора 4 перемещает логическую "1" с третьего на четвертый выход сдвигового регистра 14, которая поступает на первый вход логической схемы "И" 18, на втором входе которой в это время действует единичный уровень с прямого выхода RS-триггера 16, поэтому выходной сигнал с "И" 18 - логическая "1", - через выход ВУО блока 5 управления поступает на управляющий вход "обнуление" сумматора 7. В результате содержимое сумматора 7 сбрасывается в нулевое состояние и сумматор 7 готов к очередному циклу работы. Пятый импульс тактового генератора 4 перемещает логическую "1" с четвертого выхода на пятый сдвигового регистра 14, которая через выход ВУЗ блока 5 управления действует на преобразователь 6 временных интервалов, а именно, на вход "запись" установочного кода Ny (фиг. 3, вых. бл.6), который соответствует времени, затраченному на формирование управляющих сигналов (шесть периодов тактового генератора) в сдвиговом регистре 14. Шестой импульс тактового генератора 4 перемещает логическую "1" с пятого на шестой выход сдвигового регистра 14, которая действует на установочные входы "R" сдвигового регистра 14 и RS-триггеров 12 и 16 и переводит их в исходное состояние, т. е. на прямом выходе RS-триггера 12 устанавливается логический "0" и тем самым запрещается по входу "V" работа сдвигового регистра 14, а на инверсном выходе RS-триггера 12 устанавливается уровень логической "1", который разрешает прохождение тактовых импульсов через логическую схему "И" 15, после чего они начинают заполнять счетчик преобразователя 6 временных интервалов. На прямом выходе RS-триггера 16 устанавливается логический "0", который запрещает формирование управляющих сигналов на выходах ВУД и ВУО блока 5 управления для очередных лопаточных импульсов и только с приходом импульса, соответствующего первой лопатке, счетчик 13 блока 5 управления снова сформирует сигнал переноса, RS-триггер 16 установится в единичное состояние и процессы, описанные выше, в отношении выходов ВУД и ВУО, для блока 5 управления повторяться. Пусть с приходом прямоугольного импульса от первой лопатки сформировался цифровой код, соответствующий среднему временному интервалу на предыдущем обороте, например, Nср.i (фиг. 3, вых. бл. 8). В силу большой инерционности ротора турбомашины можно считать, что последующий период вращения ротора будет незначительно отличаться от предыдущего, поэтому Nср.i можно принять за опорную величину, относительно которой можно определять разность с текущими временными интервалами. Допустим, например, вторая лопатка (фиг. 3, u1) имеет дефект или, в силу определенных причин, уменьшилась ее жесткость, тогда в поле аэродинамических и газовых сил положение этой лопатки изменится, это приведет к изменению положения периферийного торца этой лопатки относительно других, следовательно, изменятся и расстояния, а соответственно и временные интервалы между 1-2 и 2-3 лопатками. Полученные изменения зафиксируются в преобразователе 6 временных интервалов, поэтому цифровой код, соответствующий временному интервалу между 1-ой и 2-ой лопатками будет равен N1 (фиг. 3, вых. бл. 6), а между 2-ой и 3-ей лопатками N2. Тогда на выходе блока 9 вычисления разности (фиг. 3, вых. бл. 9) сформируются цифровые коды, соответствующие в количественном выражении, величине отклонения 2-ой лопатки от своего исходного, среднего, положения. Величина этого отклонения в цифровом коде поступает на схему 11 сравнения, где происходит его сравнение с цифровым кодом Nфпк (фиг. 3), соответствующим предаварийному состоянию лопаток. Цифровой код Nфпк формируется с помощью формирователя 10 предаварийного кода, который представляет собой цифровой делитель кода Nср.i на фиксированное число "K". Деление происходит один раз за оборот ротора турбомашины по команде управляющего сигнала с выхода ВУО блока 5 управления. Как показали экспериментальные исследования, проведенные на реальном двигателе НК-12СТ с целью определения Nфпк, число "K" целесообразно выбирать в пределах (20...30)Nср.i. Такой выбор соответствует (3...5)% отклонения периферийного торца лопатки от ее среднего положения. Таким образом, если величина отклонения лопатки от своего среднего положения равна или превышает уровень Nфпк, схема 11 сравнения генерирует импульс (фиг. 3, u11), сигнализирующий о том, что появились несанкционированные режимы работы лопаток турбомашины. Сигнал "u11" (фиг. 3) можно использовать для формирования звукового или светового сигнала, либо ввести его в систему автоматического управления работой турбомашины и использовать его для "останова" двигателя.
Изобретение предназначено для измерения неоднородности лопаточного венца турбомашины, вызванной динамическими деформациями лопаток, и может быть использовано для сигнализации предаварийного состояния лопаток турбомашин в случае появления признаков усталостной прочности или дефектов лопаток либо для формирования сигнала на отключение двигателя. Технический результат - расширение функциональных возможностей. Достигается посредством измерения текущих временных интервалов между лопатками в динамическом режиме и сравнения их со средним временным интервалом между лопатками на каждом обороте ротора турбомашины с использованием импульсного датчика, формирователя, сумматора кодов, делителей суммарного кода, блока вычисления разности, блока управления и схемы сравнения. 3 ил.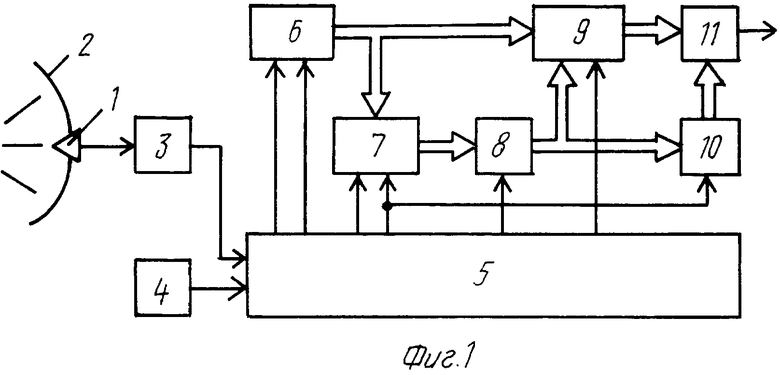
Сигнализатор предаварийных деформаций лопаток турбомашин, содержащий бесконтактный импульсный датчик, установленный в корпусе турбомашины над траекторией движения периферийных торцов лопаток, схему сравнения, отличающийся тем, что в него дополнительно введены формирователь прямоугольных импульсов, вход которого подключен к выходу бесконтактного импульсного датчика, генератор тактовых импульсов, блок управления, вход тактовых импульсов которого соединен с выходом генератора, а вход прямоугольных импульсов подключен к выходу формирователя прямоугольных импульсов, преобразователь временных интервалов в код, счетный вход которого соединен с выходом тактовых импульсов блока управления, а вход "Запись" установочного кода подключен к выходу установочной записи блока управления, сумматор цифровых кодов, соответствующих текущим временным интервалам между лопатками, цифровые входы которого соединены соответственно с цифровыми выходами преобразователя временных интервалов, управляющий вход сумматора "Суммирование" подключен к выходу управления суммированием блока управления, а вход "Обнуление" сумматора соединен с выходом управления обнулением блока управления, делитель суммарного кода на фиксированное число, соответствующее количеству лопаток в колесе турбомашины, цифровые входы которого подключены соответственно к цифровым выходам сумматора, управляющий вход делителя "Деление" подключен к выходу управления делением блока управления, блок вычисления разности, первые цифровые входы которого соединены соответственно с цифровыми выходами преобразователя временных интервалов, вторые цифровые входы подключены соответственно к цифровым выходам делителя суммарного кода, а управляющий вход "Вычитание" подключен к выходу управления вычитанием блока управления, формирователь предаварийного кода, соответствующего предаварийному уровню деформаций лопаток, цифровые входы которого подключены соответственно к цифровым выходам делителя, а управляющий вход "Деление" соединен с выходом управления обнулением блока управления, цифровые выходы формирователя предаварийного кода соединены соответственно с первыми цифровыми входами схемы сравнения, а вторые цифровые входы схемы сравнения подключены соответственно к цифровым выходам блока вычисления разности, выход схемы сравнения является выходом устройства.
| ЗАБОЛОЦКИЙ И.Е | |||
| и др | |||
| Бесконтактные измерения колебаний лопаток турбомашины | |||
| - М.: Машиностроение, 1977, с.94-95 | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВИБРАЦИЙ ЛОПАТОК | 0 |
|
SU391410A1 |
| МОНИТОРНАЯ СИСТЕМА ДЛЯ ПРЕДСТАВЛЕНИЯ КОЛЕБАТЕЛЬНЫХ СОСТОЯНИЙ МНОЖЕСТВА ЛОПАТОК НА ВРАЩАЮЩЕМСЯ РАБОЧЕМ КОЛЕСЕ | 1994 |
|
RU2125247C1 |
| US 4604699 A, 05.08.1986 | |||
| US 4934192 A, 19.06.1990 | |||
| Анализатор вибраций вращающихся деталей | 1986 |
|
SU1415071A2 |
| Сигнализатор колебаний лопаток турбомашин | 1984 |
|
SU1295235A1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТОПОЛИМЕРИЗУЮЩИХСЯ КОМПОЗИЦИЙ для РЕЛЬЕФНЫХ ИЗОБРАЖЕНИЙ | 0 |
|
SU179618A1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ОБЪЕКТА ИЛИ ПРЕДОСТАВЛЕНИЕМ УСЛУГИ | 2010 |
|
RU2461878C2 |

