Изобретение относится к измерительной технике и может быть использовано для измерений взаимных угловых положений зеркальных отражателей или для высокоточной передачи угловых координат.
Известно устройство [1] для измерения взаимного углового положения отражателей, содержащих автоколлиматор (АК), устройство коллинеарного переноса лучей (УКПЛ), первый и второй плоские зеркальные отражатели, ориентированные параллельно друг к другу и связанные между собой оптически с помощью УКПЛ и АК.
Известное устройство не позволяет измерять взаимное угловое положение отражателей ориентированных друг к другу под произвольными углами при взаимной угловой нестабильности всех элементов устройства.
Наиболее близким аналогом к заявляемому техническому решение является устройство [2] для измерения взаимного углового положения отражателей, содержащее автоколлиматор, узел коллинеарного переноса лучей, первый и второй плоские зеркальные отражатели, ориентированные параллельно друг к другу и связанные между собой оптически узлом коллинеарного переноса лучей и автоколлиматором, которое включает третий и четвертый плоские зеркальные отражатели, причем третий отражатель ориентирован под произвольным углом к первому отражателю, а четвертый отражатель, образует с первым отражателем двугранный угол, равный половине двугранного угла, образованного первым и третьим отражателями, при этом второй и четвертый отражатели жестко связаны между собой, вместе с тем устройство содержит пятый и шестой плоские зеркальные отражатели, причем пятый отражатель ориентирован под произвольным углом к первому отражателю, а шестой отражатель образует с первым отражателен двугранный угол, равный половине двугранного угла, образованного между первым и пятым отражателями, при этом шестой и второй отражатели жестко связаны между собой.
Однако с помощью этого устройства можно измерять взаимное угловое положение отражателей, ориентированных друг к другу только под одним произвольным углом. Измерения возможны только около этого положения при взаимной угловой нестабильности всех элементов (АК, УКПЛ, зеркальных отражателей и блока из второго, четвертого и шестого отражателей), определяемых пределами углового поля автоколлиматора. С помощью известного устройства [2] невозможно измерить взаимное угловое положение отражателей при непрерывном изменении взаимной угловой ориентации отражателей или при различных фиксациях произвольных углов при взаимной угловой нестабильности всех элементов. Кроме того, при использовании известного устройства в качестве углового преобразователя в измерительных комплексах известное устройство не позволяет переносить три угловые координаты от одного отражателя к другому. Возможен перенос только двух угловых координат (например, вокруг осей Х и У). Третья угловая координата (т.е. поворот отражателя в своей плоскости) не фиксируется.
Задачей изобретения является создание устройства повышенной точности измерений.
Технический результат: повышение точности измерений взаимных угловых положений плоских зеркальных отражателей для случаев непрерывного изменения взаимной угловой ориентации отражателей (динамика) или для множества произвольных фиксированных угловых положений (статика), при взаимной угловой нестабильности всех элементов устройства; формирование системы высокоточной пространственной передачи трех угловых координат или высокоточного пространственного преобразователя угла поворота (например, датчика угла, реализующего сферическую систему координат).
Технический результат достигается тем, что устройство для измерения взаимного углового положения отражателей, содержащее автоколлиматор, узел коллинеарного переноса лучей и шесть плоских зеркальных отражателей, причем первый и второй плоские отражатели ориентированы параллельно друг к другу и связаны между собой оптически узлом коллинеарного переноса лучей и автоколлиматором, третий отражатель ориентирован под прямым углом ко второму отражателю, а четвертый образует со вторым отражателем двугранный угол, равный половине двугранного угла, образованного вторым и третьим отражателями, при этом второй и четвертый отражатели жестко связаны между собой, пятый ориентирован под прямым углом ко второму отражателю, а шестой образует со вторым отражателем двугранный угол, равный половине двугранного угла, образованного между пятым и вторым отражателями, при этом шестой и второй отражатели жестко связаны между собой, вместе с тем третий отражатель связан оптически со вторым отражателем автоколлиматором и четвертым отражателем, а пятый связан оптически со вторым отражателем автоколлиматором и шестым отражателем, в отличие от известного устройства дополнено седьмым и восьмым плоскими зеркальными отражателями, первым и вторым датчиками углов поворота, каждый из которых содержит роторную и статорную части, и платформой на которой закреплены автоколлиматор, устройство коллинеарного переноса лучей, статорные части первого и второго датчиков углов поворота, при этом статорная часть первого датчика угла поворота жестко связана со вторым отражателем, а ось вращения его ротора параллельная этому отражателю, статорная часть второго датчика жестко связана с пятым отражателем, а ось вращения его ротора параллельна атому отражателю, седьмой плоский зеркальный отражатель жестко связан с ротором первого датчика угла поворота и ориентирован параллельно оси вращения ротора, восьмой плоский зеркальный отражатель жестко связан с первым отражателем и ориентирован к нему под прямым углом, при этом первый отражатель жестко связан с ротором второго датчика угла поворота.
Для обеспечения пространственной передачи угловых координат или формирования пространственного датчика угла поворота (например, реализующего сферическую систему координат) в данном устройстве седьмой отражатель жестко связан с третьим отражателем.
На чертеже изображена схема устройства.
Устройство содержит автоколлиматор 1, обеспечивающий измерения в статике и динамике, узел коллинеарного переноса лучей 2, шесть плоских зеркальных отражателей 3, 4, 5, 6, 7, 8. Первый отражатель 3 и второй отражатель 4 ориентированы параллельно друг к другу и связаны между собой оптически узлом коллинеарного переноса лучей 2 и автоколлиматором. Третий отражатель 5 ориентирован под прямым углом ко второму отражателю 4. Четвертый отражатель образует со вторым отражателем 4 двугранный угол, равный половине двугранного угла, образованного вторым 4 и третьим 5 отражателями. Второй 4 и третий 5 отражатели жестко связаны между собой. Пятый отражатель 7 ориентирован под прямым углом ко второму отражателю 4. Шестой отражатель 8 образует со вторым отражателем 4 двугранный угол, равный половине двугранного угла, образованного между пятым 7 и вторым 4 отражателями. Шестой 8 и второй 4 отражатели жестко связаны между собой. Третий отражатель 5 связан оптически со вторым отражателем 4 автоколлиматором 1 и четвертым отражателем 6. Пятый отражатель 7 связан оптически со вторым отражателем 4 автоколлиматором 1 и шестым отражателем 8. В отличие от известного устройства изобретение дополнено седьмым 9 и восьмым 10 плоскими зеркальными отражателями, первым и вторым датчиками углов поворота, каждый из которых содержит соответственно роторную 11 и 12 и статорную 13 и 14 части, платформой 15, на которой закреплены автоколлиматор 1, устройство коллинеарного переноса лучей 2, статорные части 13 первого и 14 второго датчиков углов поворота. Статорная часть 13 первого датчика угла поворота жестко связана со вторым отражателем 4, а ось вращения его ротора 11 параллельна этому отражателю. Статорная часть 14 второго датчика жестко связана с пятым отражателем 7, а ось вращения его ротора 12 параллельна этому отражателю. Седьмой плоский зеркальный отражатель 9 жестко связан с ротором 11 первого датчика угла поворота и ориентирован параллельно оси вращения ротора 11. Восьмой плоский зеркальный отражатель 10 жестко связан с первым отражателем 3 и ориентирован к нему под прямым углом, при этом первый отражатель 3 жестко связан с ротором 12 второго датчика угла поворота. Седьмой отражатель 9 жестко связан с третьим отражателем 5.
Устройство работает следующим образом. С датчиков углов поворота снимаются соответствующие отсчеты θ1(θ2) поворота ротора 11 (12) относительно статора 13 (14). Одна часть параллельного пучка лучей из автоколлиматора 1 направляется через узел коллинеарного переноса лучей 2 на отражатель 3 и после отражения возвращается по тому же пути в автоколлиматор, где снимаются угловые координаты Х1 и У1 по двум взаимно перпендикулярным направлениям. Другая часть пучка из автоколлиматора попадает на второй отражатель 4 и возвращается обратно в автоколлиматор, где снимаются отсчеты Х2 и У2. Третья часть пучка из автоколлиматора после отражения от четвертого отражателя 6 попадает на отражатель 5 и, возвращаясь обратно в автоколлиматор, дает отсчеты Х3 и У3. Четвертая часть пучка из автоколлиматора, после отражения от шестого отражателя 8, попадает на пятый отражатель 7 и, возвращаясь обратно в автоколлиматор, дает отсчеты Х5 и У5. По разности отсчетов
ΔX1= X1-X2, ΔY1= Y1-Y2,
ΔX3= X3-X2, ΔY3= Y3-Y2,
и значениям углов θ1 и θ2 определяется взаимное угловое положение отражателей 3 и 7 относительно отражателей 5 и 9.
Совокупность всех перечисленных признаков заявленного технического решения позволяет обеспечивать получение технического результата: производить высокоточные измерения взаимных угловых положений плоских зеркальных отражателей или связанных с ними пространственных систем координат при непрерывном изменении взаимного углового положения отражателей или для произвольных фиксаций таких положений при взаимной угловой нестабильности всех элементов устройства (АК, УКПЛ, биений осей роторов первого и второго датчиков углов поворота) как в статике, так и в динамике.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторское свидетельство СССР N 1744685, опубл. Бюл. N 24-92 г., МПК G 02 В 23/00.
2. Патент РФ N 2095753, опубл. Бюл. N 31-97 г., МПК G 01 В 11/26, G 02 В 23/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВ ДЛЯ ИЗМЕРЕНИЯ ВЗАИМНЫХ УГЛОВЫХ ПОЛОЖЕНИЙ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2321826C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЗАИМНОГО УГЛОВОГО ПОЛОЖЕНИЯ ОТРАЖАТЕЛЕЙ | 1996 |
|
RU2095753C1 |
| Устройство коллинеарного переноса лучей | 2024 |
|
RU2824311C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ТВЕРДОТЕЛЬНОГО ЛАЗЕРА | 2001 |
|
RU2196375C2 |
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| Способ измерений угловых параметров уголкового отражателя и устройство для его осуществления | 2018 |
|
RU2697436C1 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕР | 2001 |
|
RU2196374C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
| ТЕОДОЛИТ | 2001 |
|
RU2209392C1 |
| ЗЕРКАЛЬНО-ЛИНЗОВЫЙ ОБЪЕКТИВ | 2001 |
|
RU2192027C1 |
Использование: изобретение относится к измерительной технике и может быть использовано для измерений взаимных угловых положений зеркальных отражателей или для высокоточной передачи угловых координат. Устройство содержит автоколлиматор, узел коллинеарного переноса лучей и шесть плоских зеркальных отражателей. Устройство дополнено седьмым и восьмым плоскими зеркальными отражателями, первым и вторым датчиками углов поворота, каждый из которых содержит роторную и статорную части, и платформой, на которой закреплены автоколлиматор, устройство коллинеарного переноса лучей, статорные части первого и второго датчиков углов поворота. При этом статорная часть первого датчика угла поворота жестко связана со вторым отражателем, а ось вращения его ротора параллельна этому отражателю. Статорная часть второго датчика жестко связана с пятым отражателем, а ось вращения его ротора параллельна этому отражателю. Седьмой плоский зеркальный отражатель жестко связан с ротором первого датчика угла поворота и ориентирован параллельно оси вращения ротора. Восьмой плоский зеркальный отражатель жестко связан с первым отражателем и ориентирован к нему под прямым углом. При этом первый отражатель жестко связан с ротором второго датчика угла поворота. Технический результат: повышение точности измерений, формирование системы высокоточной пространственной передачи. 1 з.п. ф-лы, 1 ил.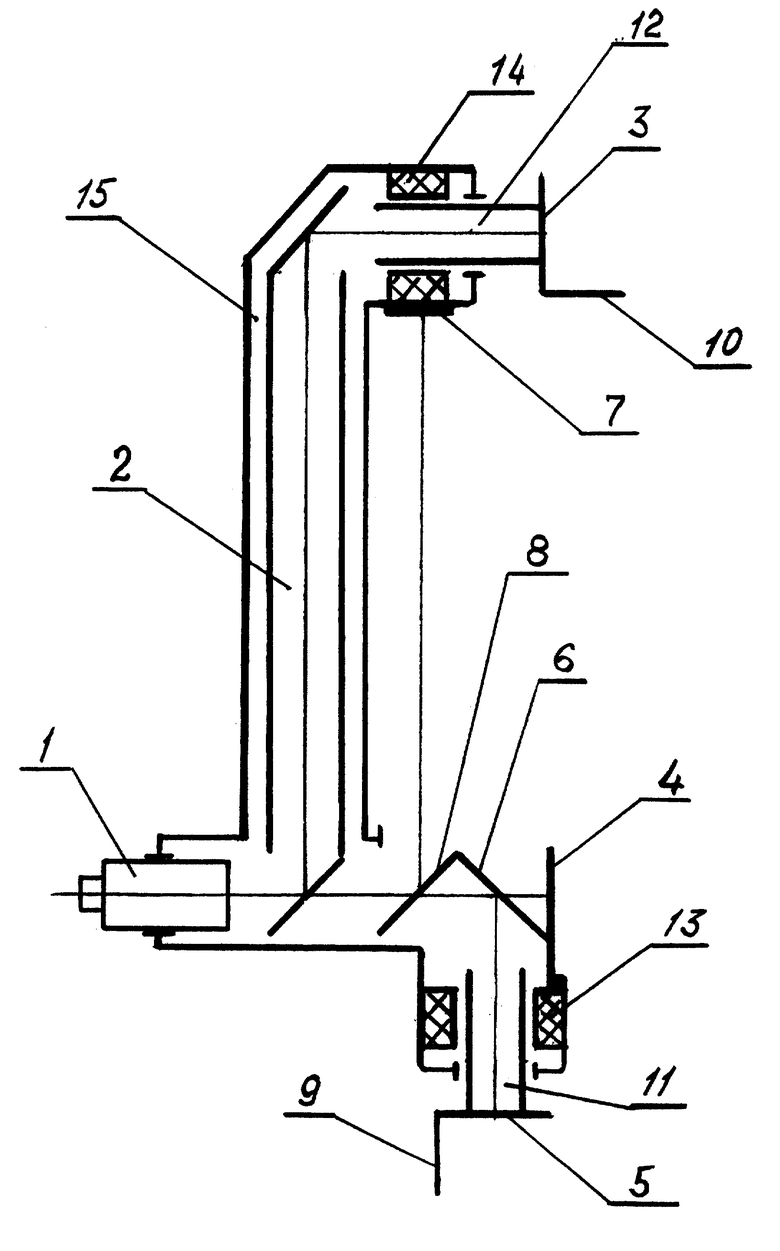
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЗАИМНОГО УГЛОВОГО ПОЛОЖЕНИЯ ОТРАЖАТЕЛЕЙ | 1996 |
|
RU2095753C1 |
| Устройство определения взаимного углового положения двух отражателей | 1989 |
|
SU1744685A1 |
| Телескоп | 1980 |
|
SU1016757A1 |

