В его главной точке, и устройства коллинеарного переноса, расположенного между объектиром трубы и дополнитель ным объективом, при этом расстояние между маркой и второй гранью базового элемента последней оси равно половине фокусного расстояния дополнительного объектива.
3. Телескоп по п.2, отличающийся тем, что каждое устройство коллинеарного переноса содержит
установленные перед его окнами вращающиеся обтюраторы, соединенные ,между собой жесткой кинематической связью.
4. Телескоп по п.1, отличающ и и с я тем, что первая от основания ось вертикальна, при этом плоский отражатель, перпендикулярный этой оси, выполнен в виде плоского зеркала на маятниковой подвеске.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескоп | 1984 |
|
SU1246041A1 |
| ТЕОДОЛИТ | 2001 |
|
RU2209392C1 |
| Система для определения погрешности направления визирования телескопа | 1985 |
|
SU1335805A1 |
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ТЕЛЕСКОПИЧЕСКОЙ СИСТЕМЫ С ЗАДАННЫМ НАПРАВЛЕНИЕМ ВЫХОДНОГО ИЗЛУЧЕНИЯ | 2015 |
|
RU2611604C1 |
| Система для определения погрешности направления визирования телескопа | 1988 |
|
SU1610257A1 |
| ТРЕХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВ ДЛЯ ИЗМЕРЕНИЯ ВЗАИМНЫХ УГЛОВЫХ ПОЛОЖЕНИЙ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2321826C1 |
| Устройство коллинеарного переноса лучей | 2024 |
|
RU2824311C1 |
| СИСТЕМА КОНТРОЛЯ УГЛОВЫХ ДЕФОРМАЦИЙ КРУПНОГАБАРИТНЫХ ПЛАТФОРМ | 2015 |
|
RU2609443C1 |
1. ТЕЛЕСКОП, содержащий установленное на фундаменте основание, смонтированные на этом основании с возможностью поворота одна над другой оси, соединенную с последней от основания осью трубу телескопа с объективом и координатором, расположенным в фокальной плоскости объектива, датчикн углов поворота осей, каждый из которых состоит из ротора, соединенного с соответствующей осьйз, и статора, причем статор, датчика первой оси закреплен на ос-. новании, а каждый статор датчика последукяцей оси закреплен на предшествукяцей ей оси, отличающийся тем, что, с целью повышения точности определения углового положения визирной оси трубы, он снабжен двумя плоскими отражателями и базовыми элементами, кажгцлй из базовых элементов соединен жестко с ротором датчика соответствующей оси и выполнен с плоскими отражающими гранями, одна из которых перпендикулярна к оси, с которой связан этот базовый элемент, другая грань перпендикулярна последующей оси, третья грань параллельна этой последующей оси, причем вторая грань базового элемента, закрепленного на роторе датчика угла поворот а после дней оси перпендику- ;лярна визирной оси трубы, а плос- , ,кие отражатели установлены на фундаменте, один из них параллелен, а второй перпендикулярен первой оси тедёскопа, при этом каждый статор, закрепленный на оси, выполнен с плоской отражающей гранью, параллельной третьей грани базового, элемента этой оси, отражающая грань статора, закрепленного на основании, параллельна плоскому отражателю, параллельному первой оси, а отражающая грань статора, закрепленного на основании, и плоский отражатель, параллельный первой оси, первая грань базового элемента первой оси и плоский отражатель, перпендикулярный первой оси, первая грань базового элемента каждой последующей оси и втс сл рая грань базового элемента предыдущей оси, отражающая грань каждого статора, закрепленного на оси, и третья грань базового элемента оси, координатор и вторая грань базового элемента последней оси оптически связаны. 2. Телескоп по п.1, о т л ,и ч а ю щ и и с я тем, что каждая из оптических связей - мезвду отражающей гранью статора, закрепленного на ОС7 О) новании, и плоским отражателем-, раллельным первой оси/ между первой СП гранью базового элемента первой оси , и плоским отражателем, перпендику лярным первой оси, между первой гранью базового элемента каждой последующей оси и второй гранью базового элемента предыдущей оси, между - отражающей гранью каждого статора, закрепленного на OCJH, и третьей гранью базового элемента, реи .- выполнена в виде устройства коллинеарного .переноса и автоколлима1 ора, а оптичёская связь между координатором и второй гранью базового элемента по следн1эй оси выполнена в виде закреплённых на, трубе телескопа дополнитель ного объектива с маркой, размещенной
f
Изобретение относится к измерител ной технике, преимущественно к устройствам для определения угловых положений визирных осей крупногабаритных следящих приборов-труб телескопов уст ановленных на многоосных монтировках.
Известно устройство для определения положения визирной оси трубы кинотеодолита, включакацее установленную на фундаменте монтировку с основанием, первой и второй осями, датчики углов поворота осей, трубу,, размещенную на последней оси { .
Недостатком известного устройства является снижение точности опредеЛения ухлового положения визирной оси трубы из-за гнутий монтировки и . трубы в процессе работы кинотеодолита.
Наиболее близким к предлагаемому является телескоп, содержащий уста- новленное на фундаменте основание, смонтированные на этом основании с возможностью поворота одна над другой оси, соединенную с последней от основания осью трубу телескопа с объективом и координатором, расположенным в фокальной плоскости объектива, датчики угла поворота осей, каждый из которых состоит из ротора, .соединенногос соответствующей осью, ;и статора, причем статор датчика первой оси закреплен на основании, а каждый статор датчика последующей оси закреплен на предшествующей к ней оси 2.
Недостатком устройства является снижение точности определения углового положения визирной оси -трубы из-за гнутий монтировки и трубы в процессе работы.
Цель изобретения - повышение точности определения углового положения визирной оси трубы.
Указанная цель достигается тем, что телескоп снабжен двумя плоскими
отражателями и базовыми элементами, каждый иэ базовых элементов соединен жестко-с ротором датчика соответствующей оси и выполнен с плоскими отражающими гранями, одна из которых перпендикулярна оси,с которой связан этот базовый элемент, другая грань перпендикулярна последующей оси, третья грань параллельна этой последующей оси, причем вторая грань базового элемента, закрепленного на роторе датчика угла поворота последней оси, перпендикулярна визирной оси трубы, а плоские отражатели установлены на фундаменте, один из которых парашлелен, а второй перпендикулярен первой оси телескопа, при .этом каждый статор, закрепленный на оси, выполнен с плоской отражающей гранью параллельной третьей грани базового элемента этой оси, отражающая грань статора, закрепленного на основании, параллельна плоскому отражателю, параллельному первой оси, а отражающая грань статора, закрепленного на основании, и плоский отражатель, параллельный первой оси, первая грань базового элемента первой оси и плоский отражатель, перпендикулярный первой оси, первая грань базового элемента каждой последующей оси и втора грань базового элемента предыдущей оси, отражающая грань каждого статора, закрепленного на оси, и третья грань базового элемента оси, координатор и вторая грань базового элемента последней оси оптически .
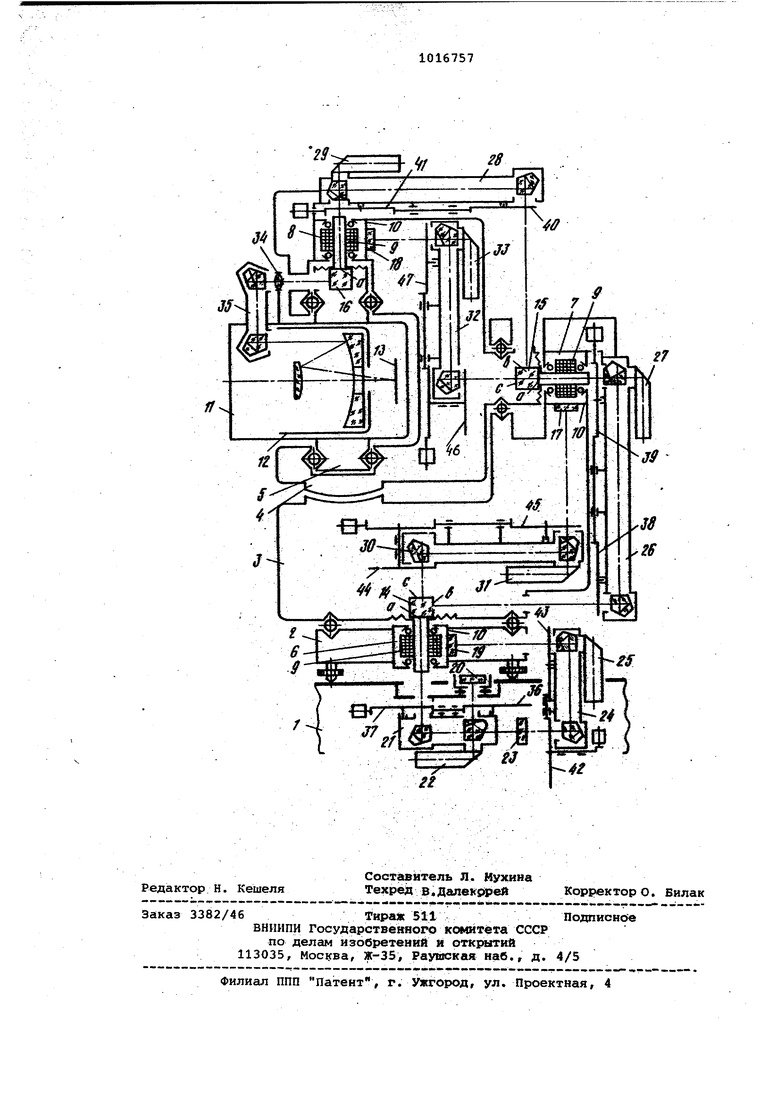
Кроме того, каждая из оптических йвязей - между отражающей гранью статора,закрепленногоНа основании, и плоским отражателем, параллельным первой, оси, между первой гранью базового элемента первой оси и плоским отражателем, перпендикулярным первой оси, между первой гранью базового элемента каждой последующей оси и второй гранью базового элемен та предыдущей оси, между отражающей гранью каяедогчэ статора, закрепленного на оси, и третьей гранью вого элемента оси - -выполнена в вид устройства коллин(барйоЪо переноса и автоколлиматора, а оптическая связь между координатором и второй гранью базового з лемента последней оси выполнена: в вад закрепленного на трубе телескопе Дрпрлнительнотю рбъекгива с маркой, размещённой в его. главной точке, и устройства KOJi WHeajpHoro; переноса., расположенного мезфу объективом и дополнительным ;Об екти8ом, этом расстрявйе между и второй граны базового последней оси но полрЕэднв .фоку«ного расстояний 5О полнйт ельного объектива. Каждое устррйетво коллинеарйого переирса содержи установленные пере его окнами firp i обтюраторы, о соеднненнЦе между собой жесткой Кйне M%TH4ecic p ftV связью,-V-. ;:. ,--- .- Крсале того Ьт основания ось вертикал на, ;|iii«3|TOM плоский отражатель, перпендикулярный этой оси, выпс)Л1нен в в11дё плоского зеркалу на маятниковбй подвеске. Иа чертеже представлена схема -Устройства. ;:-: ,.;- . - - : Устройство -вклйчает установленную на 1 монтировку с оено- вaнйe 4 2, первой осыю 3, второй осью 4 и послед(1ёй, третьей, осью 5, датчик б угла поворота первой оси, датчик 7 угла йЬворота второй оси, датчик 8 угла иЬвррота третьей, оси, каждый из которых состоит: из ро тора 9, соединенйрго с соотвезствующей осью 3-5, и статора 10. Статор датчика 6 первой оси закреплен на основайий 2, статОр датч11ка 7 второй оси - йа предыд)(ей к. ней первой оси 3, статор датчика 8 третьей оси на предаадущёй, к ней второй оси 4. Трубу 11 разме1 ёйа на последней, третьей оси 5 с объективом 12 и координатором 13, расположенным в фокальной плоскбсти объектива. Устройство также снабжено базовыми злемёнтамн 14-16, калдс(ый из которых выполнен с плоскилда отражаю щими гранями (а, в, с) и соединен с ротором датчика оси так, что одйа его грань а перпендикулярна оси вращения даайой оси. Другая градь в перпендикулярйа оси йращёнияУпосзлёдующей оси,причем для базового элемента последней (тр етьей} оси грань в перпендикуляр на визирной оси , третья грань с пapaJlлёльнa оси вращения последующей оси;статор датчика 7 второй оси {закрепленный на первой оси 3, плоскую отражающую грань 17, жестко с ним связанную и параллельную грани с базового элемента 14 первой оси . 3, статор датчика 8 третьей оси, закрепленный на второй оси 4, имеет плоскую отражающую грань 18, жестко с ним связанную и параллельную грани с базового элемента 15 второй оси 4, При.этом.грань а базового элемейта 14iпервой оси 3 и фундамент 1, rjpaHb а базового элемента 15 последующей второй оси 4 и грань в базового элемента 14 предыдущей первой оси 3, грань а базового элемента 16 последующей третьей оси 5 и грань в базового элемента 15 предыдущей второй оси 4, отражающая грань 17 статора, закрепленного на П 5рврй оси 3, и грань с базового элемента 14 оси 3, отражающая грань 18 статора, закрепленного на второй оси 4, и грань с базового элемента 16 оси 4, координатор 13 и грань в базового элемента 16 третьей оси 5 оптически связаны. того, статор датчика 6, закрепленный на основании 2, снабжен плоской отражающей гранью 19, жестко с ним связанной и параллельной.оси вращения первой оси 3, причем дан- . ная грань и фундамент 1 оптически Связаны. I При этом оптическая связь между плоской отражающей гранью а базового элемента 14 первой оси 3 и фупдаментом 1 выполнена в виде плоской .отражающей грани 20, размещенной на фундаменте параллельно: грани а, и устройство Коллинеарного переноса 21 с ав токоллиматором 22, установленными на фундаменте 1 между указанными гранями, оптическая связь между плоской отражающей гранью 19 статораiзакреплённого на основании, и фундаментом 1, выполнена в виде плоской отражающей грани 23, размещенной на фундаменте параллельно грани 19, устройства Коллинеарного переноса 21 с автоколлиматором 25, установленными на фундаменте 1 между указанными парс1ллельны ш гранями. Оптическая связь между отражаняцей гранью .а базового злемента 15 и отражакнцей гранью в базового элемента 14 выполнена в виде устройства, Коллинеарного переноса 26 с автокоялиматором 27, за крепленных на первой оси 3 между дан грангали, оптическая связь между отражающей гранью а базового элемента 16 и гранью в базового элемента 15 выпioлнeнa в виде устройства 28 Коллинеарного переноса и автоколЛиМатора 29, закрепленных на второй оси 4 между этими гранями, оптическая связь между грайью 17 и гранью с базового элемента 14 выполнена в иде устройства 30 Коллинеарного переноса н автоколлиматора 31, закрепленных на первой оси мезду указанными Гранями. Оптическая связь между Г ванью 18 и гранью с базового элемента 15 выполнена в виде устройства 32 коллинеарного ,переноса и авто коллиматора 33, закрепленных между связываемыми гранями на второй оси 4, причем во всех случаях визирный луч автоколлиматора разделен устрой ством коллинеарного переноса на два коллинеарных луча, перпендикулярных к связываемым отрешающим граням. Оп тическая связь между координатором 13 и гранью в базового элемента 16 последней третьей оси 5 выполнена в виде дополнительного объектива 34 с маркой, размещенной в его глав ной точке, установленного на трубе 11 так, что марка находится на поло вине фокусного расстояния этого объектива 34 от грани в и включает устройство 35, коллинеарного переноса, расположенное на трубе между объективом трубы 12 и дополнительным объективом 34. Для предотвращения наложения автоколлимационных изображений в поле зрения каждого автоколлиматора от оптически связанных отражающих граней каждое устройство коллинеарного переноса вьшолнёно с установленными перед его окнами вращающимися обтюраторами 36-47, связанными жесткой кине матической связью. В случае, если ось вращения первой оси 3 вертикальна, отражакадая грань 20, расположенная в фундаменте параллельно отражающей грани а базового элемента 14 первой оси, мо жет быть выполнена в виде плоского зеркала, на маятниковой подвеске. Каждый базовый элемент может быт выполненв виде куба, предпочтитель ным является выполнение базового элемента в виде многогранника, что может быть использовано при эталони ровании датчиков. Устройство работает следующий об разом; .Для определения углового положен визирной оси трубы телескопа в кажд фиксированный момент времени по дат чикам углов поворота осей 6-8 снима ют угловые отсчеты ( . Кроме того, в фиксированный момент времени, используя оптическую связь грани а базового элемента 14 с фундаментом 1, определ5пот угловое положение грани с р ) относительно Фундамента, используя оптическую сэязь грани а базового элемента 15 с гранью в базового элемента 14, определяют угловое положение (2 ° носительно грани в таким же образом, используя оптические связи, определяют угловое положение (-j-j , /ь j ) грани а базового элемента 16 относительно грани в базового элемента 15, угловое положение (л02 отражакидей грани 17 относительно грани с базового элемента 14 в плоскости, перпендикулярной оси вращения второй оси, угловое положение (л0)отражающей грани 18 относительно грани с базового элемента 1б в плоскости, перпендикулярной оси вращения третьей оси, используя оптическую связь грани в базового элемента 16 с координатором 13, определяют угловое положение (о, р.)визирной оси трубы 11 относительно нормали к грани в. Применяя известные выражения преобразования координат определяют угловое положение визирной оси. Кроме того,с помощью предлагаемого устройства возможно решать обратную задачу, с высокой точностью до несколько угловых секунд )задавать произвольное исходное направление, например, при лазерной локации,когда вместо трубы установлен блок лазеров с передающими-телескопами; с высокой точностью выводить трубу в заданную пространственную область. Устройство является экономически эффективнйм, оно позволяет пользоваться более дешевыми, т. е. более грубыми, астрономическими инструментами, у которых гнутия составляют угловые минуты, и получать такие же точности, как и с помощью дорогих инструментов с жесткой геометрией осью, с высокоточными подшипниками и сложной механикой.
мЬо.
11Ж1ч/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Елисеев С.В | |||
| Геолеэические приборы и инструменты | |||
| М., Недра, 1973, с | |||
| Телефонная трансляция с местной цепью для уничтожения обратного действия микрофона | 1924 |
|
SU348A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Михельсон Н,Н | |||
| Оптические телескопы | |||
| Теория и конструкция | |||
| М., Наука, 1976, с | |||
| Ленточный тормозной башмак | 1922 |
|
SU337A1 |
