Изобретение относится к оптическому приборостроению и может быть использовано в устройствах, применяемых для высокоточных измерений угловых координат: телескопах, теодолитах.
Известен теодолит [1], включающий установленную на фундаменте монтировку с основанием, первой и второй осями, с датчиком угла поворота первой оси, датчиком угла поворота второй оси, трубой, установленной на второй оси, и объективом, закрепленным на трубе. Теодолит имеет недостаточную точность измерений угловых координат из-за деформаций конструкции и угловых колебаний осей ("боя" осей), возникающих в процессе работы инструмента.
Наиболее близким аналогом к предлагаемому техническому решению является телескоп [2], содержащий:
- основание, установленное на фундаменте,
- смонтированные на этом основании с возможностью поворота одна над другой две оси,
- датчики углов поворота осей, каждый из которых состоит из ротора, соединенного с соответствующей осью, и статора, причем статор датчика первой оси закреплен на основании, а статор датчика второй оси закреплен на первой оси,
- первый базовый элемент, жестко связанный с ротором датчика первой оси и имеющий первую отражающую грань, ориентированную перпендикулярно второй оси,
- второй базовый элемент, жестко связанный с ротором датчика второй оси и имеющий две отражающие грани: вторую и третью, при этом вторая грань ориентирована перпендикулярно второй оси, а третья параллельна второй оси,
- первое плоское зеркало, закрепленное на статоре датчика второй оси и перпендикулярное первой оси,
- второе плоское зеркало, закрепленное на статоре датчика первой оси и параллельное первой оси,
- автоколлиматор и устройство коллинеарного переноса лучей, закрепленные на первой оси так, что они связывают оптически первую и вторую отражающие грани базовых элементов осей,
- трубу, установленную на второй оси,
- объектив с первой маркой, расположенной в его главной плоскости, закрепленный на трубе так, что главная плоскость находится от второй отражающей грани второго базового элемента на расстоянии, равном половине фокусного расстояния объектива,
- третье плоское зеркало, расположенное на фундаменте и ориентированное перпендикулярно первой оси.
Однако это устройство имеет избыточное число оптических связей в виде устройств коллинеарного переноса лучей и автоколлиматоров, из-за чего усложняется конструкция и снижается точность теодолита. Каждая оптическая связь вносит дополнительную погрешность. Усложняется эксплуатация теодолита. Необходимо проводить дополнительные поверки каждого автоколлиматора.
Задачей изобретения является создание теодолита с повышенной точностью измерений и упрощенной конструкцией.
Технический результат, обусловленный поставленной задачей, достигается тем, что теодолит, содержащий:
- установленное на фундаменте основание,
- смонтированные на этом основании с возможностью поворота одна над другой две оси,
- датчики углов поворота осей, каждый из которых состоит из ротора, соединенного с соответствующей осью, и статора, причем статор датчика первой оси закреплен на основании, а статор датчика второй оси закреплен на первой оси,
- первый базовый элемент, жестко связанный с ротором датчика первой оси,
- второй базовый элемент, жестко связанный с ротором датчика второй оси, причем первый базовый элемент имеет отражающую грань, ориентированную перпендикулярно второй оси, а второй базовый элемент имеет две отражающие грани: вторую и третью, при этом вторая грань ориентирована перпендикулярно ко второй оси, а третья грань параллельна второй оси,
- первое плоское зеркало, закрепленное на статоре датчика второй оси и перпендикулярное первой оси,
- второе плоское зеркало, закрепленное на статоре датчика первой оси и параллельное первой оси,
- автоколлиматор и устройство коллинеарного переноса лучей, закрепленные на первой оси так, что они связывают оптически первую и вторую отражающие грани базовых элементов осей,
- трубу, установленную на второй оси,
- объектив с первой маркой, расположенной в его главной плоскости, закрепленный на трубе так, что главная плоскость находится от второй отражающей грани второго базового элемента на расстоянии, равном половине фокусного расстояния объектива,
- третье плоское зеркало, расположенное на фундаменте и ориентированное перпендикулярно первой оси,
в отличие от известного в теодолите первый базовый элемент дополнен двумя светоделительными гранями, первая из которых образует половину двугранного угла между первой отражающей гранью этого базового элемента и первым плоским зеркалом, а вторая светоделительная грань образует половину двугранного угла между первой отражающей гранью и плоскостью третьего зеркала, при этом первое и третье зеркала связаны оптически с помощью автоколлиматора, двух светоделительных граней и первой отражающей грани.
Для обеспечения возможности визуального наведения трубы на объект наблюдения теодолит может быть дополнен первой и второй отклоняющими оптическими призмами, вторым объективом, микрометром и окуляром, установленными на второй оси и оптически связанными с первым объективом и первой маркой так, что оптическая ось первого объектива сопряжена через отклоняющие оптические призмы с оптической осью второго объектива и окуляра.
Для удобства привязки на местности теодолит может быть дополнен третьим объективом со второй маркой.
Совокупность всех перечисленных признаков заявленного технического решения при существенном упрощении конструкции позволяет обеспечивать высокоточные измерения угловых координат.
На чертеже изображена схема теодолита. Теодолит содержит установленное на фундаменте 1 основание 2. На основании одна над другой смонтированы с возможностью поворота первая 3 и вторая ось 4. Датчик угла поворота первой оси включает в себя ротор 5, соединенный с первой осью 3, и статор 6, закрепленный на основании 2. Датчик угла поворота второй оси включает в себя ротор 7, соединенный со второй осью 4, и статор 8, закрепленный на первой оси 3. Первый базовый элемент жестко связан с ротором 5 первой оси и содержит первую отражающую грань 9, ориентированную перпендикулярно второй оси. Второй базовый элемент жестко связан с ротором датчика 7 и содержит две отражающие грани: вторую 10, ориентированную перпендикулярно второй оси, и третью 11, параллельную второй оси. Первое плоское зеркало 12 закреплено на статоре датчика второй оси и перпендикулярно первой оси. Второе плоское зеркало 13 закреплено на статоре датчика первой оси и параллельно первой оси. Автоколлиматор 14 и устройство коллинеарного переноса лучей 15 закреплены на первой оси так, что они связывают оптически первую и вторую отражающие грани 9 и 10 базовых элементов осей. Трубу 16, установленную на второй оси. Объектив 17 с первой маркой 18, расположенной в его главной плоскости, закреплен на трубе так, что главная плоскость находится на расстоянии от третьей отражающей грани 11, равном половине фокусного расстояния объектива. Третье плоское зеркало 19 расположено на фундаменте и ориентировано перпендикулярно первой оси.
В отличие от известного в заявляемом техническом решении имеются следующие дополнения. Первый базовый элемент первой оси, включающий первую отражающую грань 9, дополнен двумя светоделительными гранями, первая из которых 20 образует половину двугранного угла между первой гранью 9 и первым зеркалом 12 на статоре датчика второй оси; вторая 21 образует половину двугранного угла между первой гранью 9 и плоскостью третьего зеркала 19. При этом первое зеркало 12 и третье зеркало 19 связаны оптически с помощью автоколлиматора 14, двух светоделительных граней 20 и 21 и первой отражающей грани 9 первого базового элемента.
Для обеспечения возможности визуального наведения на объект наблюдения теодолит может быть дополнен первой 22 и второй 23 отклоняющими оптическими призмами, вторым объективом 24, микрометром 25 и окуляром 26, установленными на второй оси и оптически связанными с первым объективом 16 и первой маркой 18 так, что оптическая ось первого объектива сопряжена через отклоняющие оптические призмы 22, 23 с оптической осью второго объектива и окуляра.
Для удобства привязки на местности теодолит дополнен третьим объективом 27 со второй маркой 28.
Теодолит работает следующим образом. Визирная ось, образованная объективом 17 с первой маркой 18 и зеркалом 11, наводится на измеряемый объект поворотами вокруг первой 3 и второй 4 осей. Изображение объекта с первой маркой 18 через отклоняющие оптические призмы 22, 23 и второй объектив 24 наблюдается в плоскости микрометра 25, по которому через окуляр 26 снимают отсчеты, например XI и Y1. Визирная ось, образованная третьим объективом 27 со второй маркой 28 и зеркалом 13, задает базовое азимутальное направление, от которого по датчику (5, 6) первой оси 3 снимают отсчет, например Q1. По датчику второй оси (7, 8) снимают отсчет, например, Q2. По автоколлиматору 14 через устройство коллинеарного переноса лучей 15 от отражающей грани 10 снимают отсчеты, например Х2 и Y2. От отражающей грани 9 снимают отсчеты Х3 и Y3. От зеркала 12 через светоделительную грань 20 снимают отсчеты Х4 и Y4. От зеркала 19 на фундаменте через светоделительную грань 21 снимают отсчеты Х5 и Y5. По совокупности всех этих отсчетов определяют угол места и азимутальный угол направления на объект.
Изобретение обеспечивает выполнение технического результата: повышение точности измерений углов при существенно более простой конструкции теодолита, так как в предложенном техническом решении используется один автоколлиматор вместо множества автоколлиматоров известного телескопа.
Источники информации
1. Елисеев С.В. Геодезические приборы и инструменты. М., Недра, 1973, с. 348-353.
2. А.с. СССР 1016757, кл. G 02 В 23/00, бюл. 17, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескоп | 1980 |
|
SU1016757A1 |
| Телескоп | 1984 |
|
SU1246041A1 |
| Устройство для измерения азимутального направления | 1990 |
|
SU1795278A1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| ТРЕХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВ ДЛЯ ИЗМЕРЕНИЯ ВЗАИМНЫХ УГЛОВЫХ ПОЛОЖЕНИЙ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2321826C1 |
| Система для определения погрешности направления визирования телескопа | 1985 |
|
SU1335805A1 |
| Устройство коллинеарного переноса лучей | 2024 |
|
RU2824311C1 |
| АВТОКОЛЛИМАЦИОННЫЙ ТЕОДОЛИТ | 1995 |
|
RU2106600C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОВОРОТА ОБЪЕКТА | 2011 |
|
RU2471148C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
Изобретение относится к оптическому приборостроению и может быть использовано в устройствах, применяемых для высокоточных измерений угловых координат: телескопах, теодолитах. Теодолит содержит основание, смонтированные на основании две оси, датчики углов поворота осей, первый и второй базовые элементы, три плоских зеркала, автоколлиматор, устройство коллинеарного переноса лучей, трубу на второй оси, объектив с первой маркой. Датчики углов поворота содержат ротор и статор. Первый и второй базовый элементы жестко связаны с ротором датчика первой и второй оси соответственно. Первый базовый элемент имеет первую отражающую грань, которая ориентирована перпендикулярно второй оси, и две светоделительные грани. Каждая из светоделительных граней образует половину двугранного угла между первой гранью и между первым и третьим зеркалом соответственно. Первое и третье зеркала связаны оптически с помощью автоколлиматора, двух светоделительных граней и первой отражающей грани. Второй базовый элемент имеет вторую и третью отражающие грани, которые ориентированы соответственно перпендикулярно и параллельно второй оси. Первое плоское зеркало закреплено на статоре датчика второй оси перпендикулярно первой оси. Второе плоское зеркало закреплено на статоре датчика первой оси параллельно первой оси. Третье плоское зеркало расположено на фундаменте и ориентировано перпендикулярно к первой оси. Автоколлиматор и устройство коллинеарного переноса лучей закреплены на первой оси, связывая оптически первую и вторую отражающие грани. Технический результат состоит в повышении точности измерений и упрощении конструкции теодолита. 2 з.п. ф-лы, 1 ил.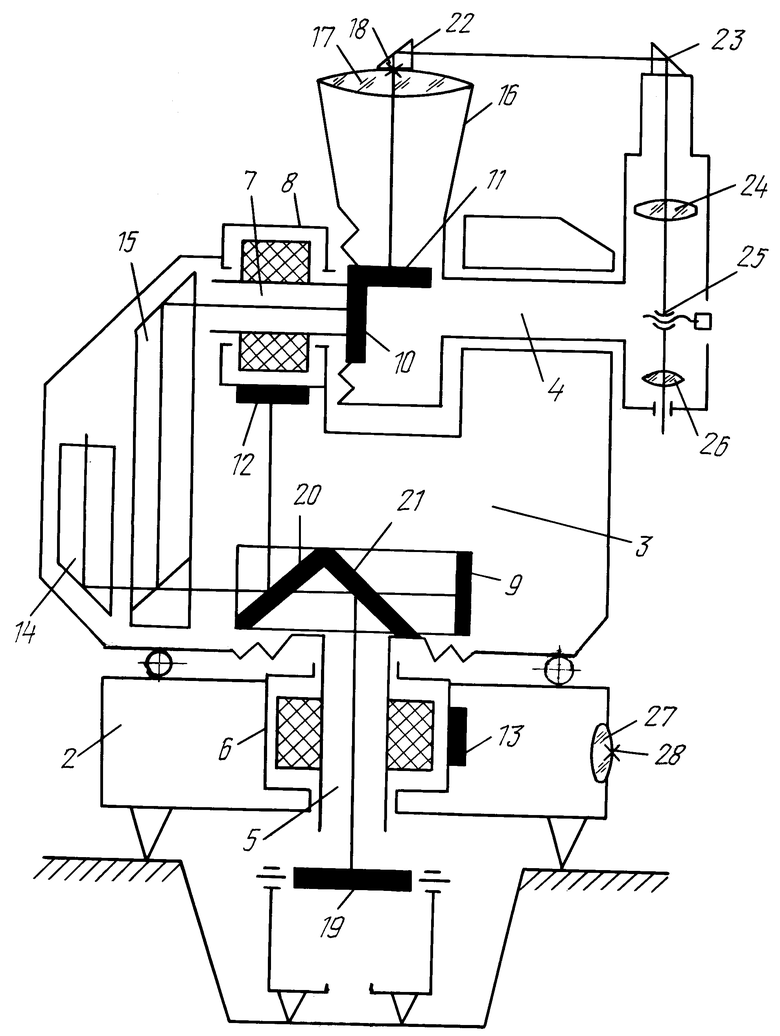
| Телескоп | 1980 |
|
SU1016757A1 |
| Телескоп | 1984 |
|
SU1246041A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЗАИМНОГО УГЛОВОГО ПОЛОЖЕНИЯ ОТРАЖАТЕЛЕЙ | 1996 |
|
RU2095753C1 |
| Исполнительный механизм робота | 1991 |
|
SU1798176A1 |
| Акустический способ контроля сильфонов | 1984 |
|
SU1208508A1 |

