Область изобретения
Изобретение относится к распознаванию и идентификации сигналов и может быть использовано, например, при распознавании речи, изображений и различных иных применениях.
Существующий уровень техники
В настоящее время известно много различных способов идентификации и распознавания сигналов.
Так, в патенте США 4190820 (G 06 К 9/00, 26.02.1980) описан способ проверки подлинности подписи, в котором сравниваются две последовательности сигналов с маркировочными знаками между нормированными к заданным шаблонам сегментами каждой последовательности путем подсчета числа этих маркировочных знаков в каждой последовательности и сравнения результатов этих подсчетов между собой. Этот способ имеет ограниченное применение и недостаточно высокую точность, поскольку ограниченное количество шаблонов и индивидуальные особенности каждой подписи могут привести к тому, что некоторые из выделенных сегментов будут отнесены не к тому шаблону.
В патенте США 4783809 (G 10 L 5/06, 08.11.1999) описан способ распознавания речи в реальном времени, в котором акустические характеристики неизвестной речи сопоставляются с заданными шаблонами, в результате чего выстраиваются цепочки эталонных шаблонов, которые сравниваются с запомненными цепочками. Недостаток этого способа тот же, что и у предыдущего: ограниченное количество шаблонов не всегда дает возможность точно сопоставить их звукам реальной речи.
В патенте России 2090928 (G 06 К 9/00, 20.09.1997) описан способ анализа сигналов о состоянии объекта, где сначала формируют несколько обучающих сигналов, по которым создают распознающий эталон, а затем сравнивают сигнал о состоянии объекта с этими распознающими эталонами. Здесь каждый эталон представляет собой некоторое усреднение от нескольких обучающих сигналов, т. е. заведомо не может охватить всего разнообразия возможных исследуемых сигналов.
Наиболее близким к заявленному является способ идентификации сигналов, заключающийся в выполнении следующих операций: выбирают заранее заданный интервал на каждом из по меньшей мере одного эталонных сигналов; обрабатывают каждый эталонный сигнал на упомянутом заранее заданном интервале для нахождения по меньшей мере одной его характеристики; запоминают в машиночитаемой базе данных всю информацию о найденных характеристиках для каждого эталонного сигнала; повторяют упомянутые операции выбора, обработки и запоминания для каждого сигнала, подлежащего распознаванию; сравнивают найденные характеристики каждого сигнала, подлежащего распознаванию, с соответствующими данными для каждого из эталонных сигналов, запомненными в машиночитаемой базе данных; принимают решение о распознавании конкретного сигнала, подлежащего распознаванию, по результатам упомянутой операции сравнения (патент США 5295190, G 10 L 5/06, 15.03.1994). Недостаток этого способа состоит в том, что в качестве характеристик каждого сигнала, подлежащих анализу, используют только его спектральные характеристики в отдельных точках частотной оси, что сказывается на точности этого способа.
Раскрытие изобретения
Таким образом, цель настоящего изобретения заключается в создании такого способа, который обеспечивал бы в качестве технического результата более точную идентификацию сигналов на основе учета всего анализируемого сигнала любой заранее неизвестной формы.
Для решения этой задачи с достижением указанного технического результата предлагается маркерный способ идентификации сигналов, заключающийся в выполнении следующих операций: выбирают заранее заданный интервал на каждом из по меньшей мере одного эталонных сигналов; обрабатывают каждый эталонный сигнал на заранее заданном интервале для нахождения по меньшей мере одной его характеристики; запоминают в машиночитаемой базе данных всю информацию о найденных характеристиках для каждого эталонного сигнала; повторяют операции выбора, обработки и запоминания для каждого сигнала, подлежащего распознаванию; сравнивают найденные характеристики каждого сигнала, подлежащего распознаванию, с соответствующими данными для каждого из эталонных сигналов, запомненными в машиночитаемой базе данных; принимают решение о распознавании конкретного сигнала, подлежащего распознаванию, по результатам операции сравнения, причем согласно настоящему изобретению при операции обработки интегрируют по меньшей мере один заранее заданный информационный параметр каждого эталонного сигнала на заранее заданном интервале и определяют для каждого из заранее заданных информационных параметров каждого эталонного сигнала на заранее заданном интервале маркер, представляющий собой точку, которая разделяет этот интервал на такие части, что отношение интеграла от данного информационного параметра на одной из этих частей к интегралу от этого же информационного параметра на другой из этих частей находится в заранее заданных пределах, после чего и запоминают всю информацию о найденных маркерах в машиночитаемой базе данных в операции запоминания; для каждого сигнала, подлежащего распознаванию, при повторении операций выбора, обработки и запоминания осуществляют действия, аналогичные действиям операции интегрирования и определения маркера; в операции сравнения в качестве сравниваемых характеристик используют маркеры распознаваемых и эталонных сигналов; в операции принятия решения принимают решение об идентификации конкретного сигнала, если по меньшей мере заданное число маркеров сигнала, подлежащего идентификации, с заранее заданной точностью совпадает с соответствующими маркерами какого-либо из заранее заданных эталонных сигналов.
Особенностью способа по настоящему изобретению является выполнение дополнительно следующих операций: изменяют для каждого сигнала заранее заданный интервал с заранее заданным шагом; выполняют операцию интегрирования и определения маркера на каждом шаге изменения заранее заданного интервала; определяют зависимости положения каждого маркера каждого эталонного сигнала от величины заранее заданного интервала; повторяют операции выбора, обработки и запоминания для зависимостей, найденных в операции принятия решения для эталонных сигналов; выполняют операцию сравнения для найденных зависимостей положения маркера.
Еще одной особенностью способа по настоящему изобретению является то, что операции изменения заранее заданного интервала, интегрирования и определения на нем маркера, определения зависимости положения маркера от заранее заданного интервала, повторения операций выбора, обработки и запоминания для зависимостей, найденных в операции принятия решения для эталонных сигналов, и операции сравнения для зависимостей положения маркера повторяют для уже найденных зависимостей положения каждого маркера, соответственно выбирая очередную из найденных зависимостей в качестве подлежащего распознаванию сигнала и выбирая интервал для каждой зависимости в качестве заранее заданного интервала.
При этом в качестве заранее заданного информационного параметра используют амплитуду идентифицируемого сигнала, или сдвиг фазы идентифицируемого сигнала относительно заранее заданного эталонного значения, или частоту идентифицируемого сигнала, или временную задержку заранее заданной характеристики идентифицируемого сигнала относительно заранее заданного эталонного положения.
В существующем уровне техники не выявлены объекты того же назначения, которые содержали бы соответствующие совокупности признаков описанного выше способа. Это позволяет считать заявленный способ новым.
Из существующего уровня техники неизвестны также источники, в которых были бы описаны совокупности признаков, отличающие заявленный способ от соответствующих наиболее близких аналогов. Это позволяет считать заявленный способ имеющим изобретательский уровень.
Краткое описание чертежей
Настоящее изобретение поясняется чертежами, где одинаковые ссылочные позиции на разных чертежах относятся к одинаковым элементам.
Фиг. 1 иллюстрирует основной принцип маркерного способа идентификации сигналов по настоящему изобретению.
Фиг. 2 иллюстрирует вариант применения маркерного способа по настоящему изобретению.
Фиг. 3 иллюстрирует пример распознавания речевых сигналов в соответствии со способом по настоящему изобретению.
Фиг. 4 представляет обобщенную блок-схему устройства для реализации способа по настоящему изобретению применительно к распознаванию речи.
Фиг. 5 иллюстрирует двухступенчатое использование маркерного способа по настоящему изобретению.
Подробное описание предпочтительных выполнений изобретения
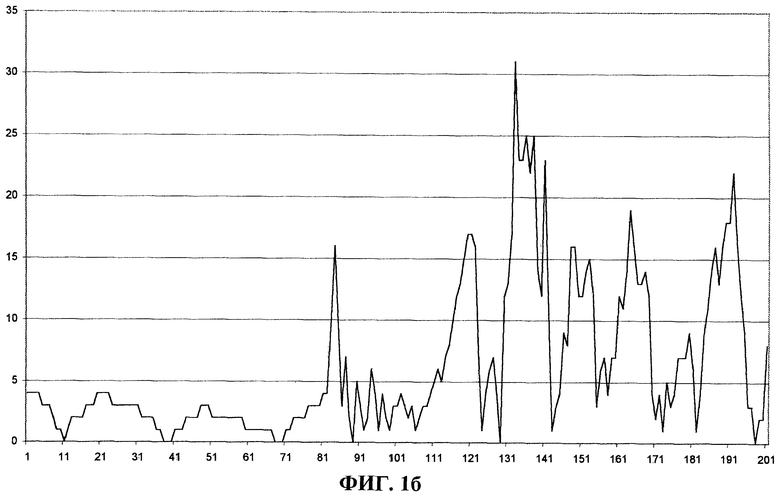
Основной принцип маркерного способа идентификации сигналов по настоящему изобретению проиллюстрирован на фиг.1, по горизонтальной и вертикальной координатным осям которого отложены в условных единицах соответственно время и амплитуда.
На фиг.1а показана временная диаграмма некоторого сигнала на конкретном временном интервале. В данном примере маркерный способ по настоящему изобретению иллюстрируется на конкретном примере, когда в качестве заранее заданного информационного параметра идентифицируемого сигнала используют его амплитуду. Для того чтобы избежать сложности с изменением знака у сигналов со знакопеременными амплитудами, данный подлежащий идентификации сигнал преобразуется к виду, показанному на фиг.1б, путем применения операции взятия модуля от амплитуды знакопеременного сигнала. Данная операция совершенно необязательна и упоминается здесь только для повышения наглядности используемого далее метода нахождения маркеров. Данный сигнал одного знака может быть получен с помощью обычного двухполупериодного выпрямителя на двух противоположно включенных диодах с общей нагрузкой.
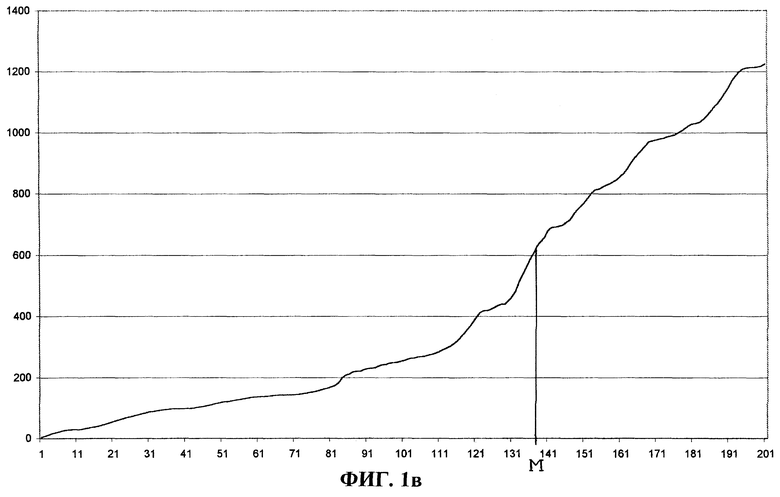
Полученный в результате сигнал (фиг.1б) подвергается операции интегрирования на данном временном интервале. Вид получающегося при этом сигнала показан на фиг.1в. После получения интеграла от взятой по модулю амплитуды идентифицируемого сигнала определяется точка, в которой полученный интеграл делится в заранее заданном соотношении. Пусть это соотношение задано как половина от конечной величины полученного интеграла. Точка на временной оси, в которой интеграл от взятой по модулю амплитуды идентифицируемого сигнала, достигает половинного значения от своей конечной величины, и будет в данном случае искомым маркером М данного сигнала на выбранном временном интервале.
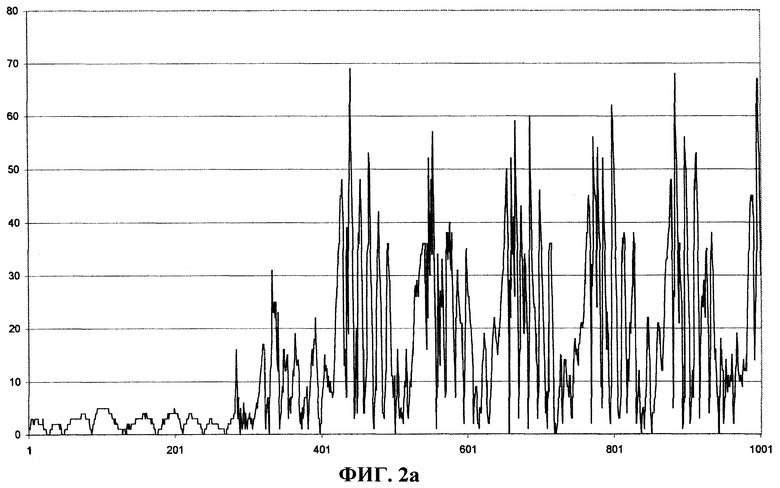
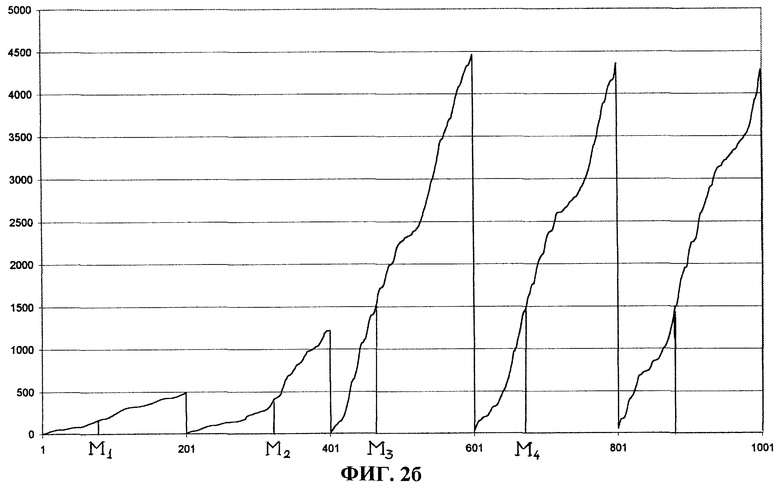
На фиг.2 (с теми же величинами по координатным осям, что и на фиг.1) показан более предпочтительный пример, в котором сигнал, начальная часть которого показана на фиг. 1б, разбивается на несколько временных интервалов (фиг.2а), на каждом из которых определяется интеграл от взятой по модулю амплитуды идентифицируемого сигнала (фиг.2б). После этого на временной оси каждого из этих временных интервалов находится точка, в которой полученный на данном временном интервале интеграл делится в заранее заданном соотношении - в данном примере это соотношение составляет 1/3. В результате получается набор из четырех маркеров M1-M4.
Маркерный способ идентификации сигналов по настоящему изобретению реализуется следующим образом.
Сначала выбираются, задаются или каким-либо иным образом определяются эталонные сигналы, с которыми впоследствии будут сопоставляться сигналы, подлежащие идентификации. Для каждого из этих эталонных сигналов на заранее заданных временных интервалах вычисляется интеграл от выбранного информационного параметра. Этим информационным параметром может быть, как в вышеприведенных примерах, амплитуда сигнала; однако в качестве информационного параметра может быть выбрана также и иная характеристика, - например, это может быть сдвиг фазы исследуемого сигнала относительно заранее заданного эталонного значения, либо его частота, либо временная задержка заранее заданной характеристики сигнала (к примеру, начало или точка с амплитудой заданного уровня либо заданной крутизны) относительно заранее заданного эталонного положения. В принципе, все эти случаи могут быть сведены к уже показанному случаю, где в качестве характеристики сигнала используется его амплитуда, путем такого преобразования этого сигнала, чтобы сдвиг фазы, частота или временная задержка трансформировались в амплитуду преобразованного сигнала.
Итак, после разбиения эталонного сигнала на временные интервалы, которые могут быть как одинаковыми, так и неравными между собой, осуществляется интегрирование выбранного информационного параметра и определение маркеров, т. е. тех точек на выбранных временных интервалах, в которых найденные интегралы делятся в заранее заданном соотношении. Определенные таким образом точки (в данном случае - моменты времени) запоминаются для каждого эталонного сигнала в соответствующей базе данных как набор его маркеров.
При поступлении некоторого сигнала, подлежащего идентификации, для него тоже определяются маркеры в точном соответствии с вышеуказанной последовательностью операций. После определения набора маркеров этого идентифицируемого сигнала производится их сравнение с наборами маркеров всех эталонных сигналов. Это сравнение производится с заранее заданной точностью, т.е. если по крайней мере для заданной части (например, для трех четвертей) маркеров разность каждой пары соответствующих маркеров (т.е. отдельно для первого временного интервала, отдельно для второго временного интервала и т.д.) идентифицируемого и эталонного сигналов попадает в заранее заданный допуск (к примеру, ±5% от величины соответствующего эталонного маркера), данный идентифицируемый сигнал считается идентифицированным с тем эталонным сигналом, для которого с упомянутой заданной точностью выполнился упомянутый критерий совпадения заданного числа маркеров.
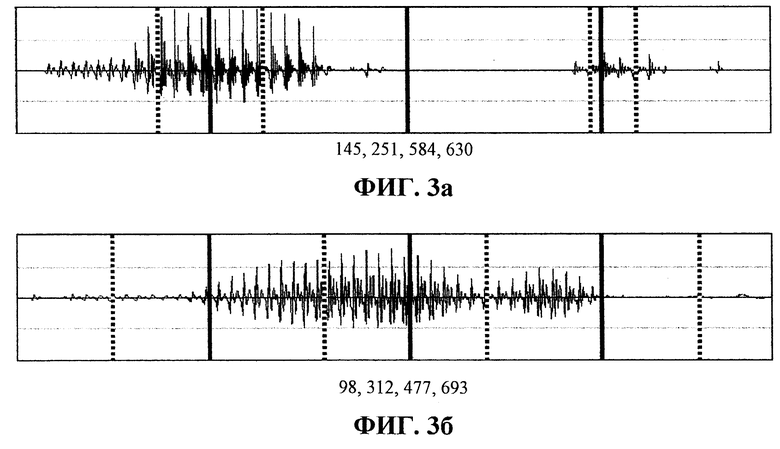
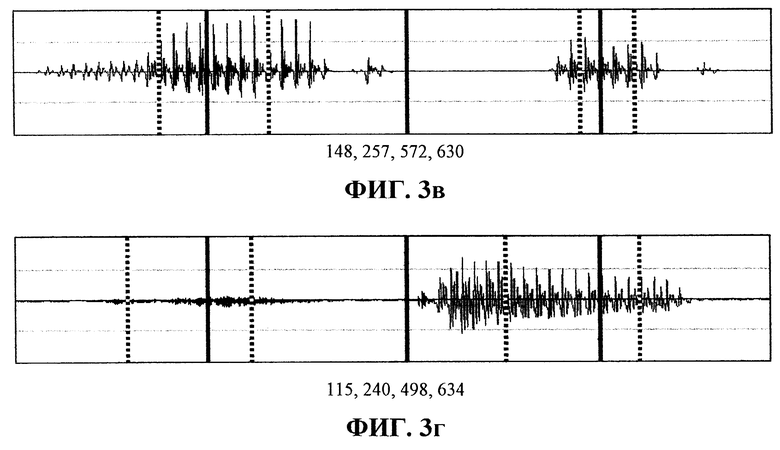
Фиг. 3 иллюстрирует пример идентификации двух речевых сигналов с помощью двух эталонных сигналов, в качестве которых взяты произнесенные слова "маркер" и "девять". На фиг.3а и б представлены амплитудные зависимости этих эталонных сигналов, каждый из которых разделен на четыре равных временных интервала. На каждом из этих временных интервалов найден маркер, положение которого показано пунктиром, как точка, в которой интегралы от амплитуды сигнала для участков слева и справа от этой точки равны между собой. Эти маркеры в условных числах проставлены под каждой диаграммой фиг.3.
На фиг. 3в и 3г показаны временные диаграммы двух сигналов, подлежащих идентификации, для которых также определены маркеры на таких же временных интервалах по той же методике, что и для сигналов на фиг.3а и 3б. Полученные при этом наборы числовых значений маркеров сравниваются с наборами для каждого из эталонных сигналов (фиг.3а и 3б). В результате оказывается, что для первого из подлежащих идентификации сигналов все разности соответствующих маркеров (т. е. пар маркеров на одноименных временных интервалах) не превышают 2,5% от значений соответствующих маркеров эталонного сигнала "маркер", но существенно больше 5% для соответствующих значений маркеров эталонного сигнала "девять". Следовательно, первый из подлежащих идентификации сигналов может быть распознан как полученный в результате произнесения слова "маркер". Для второго же из подлежащих идентификации сигналов лишь в двух случаях из четырех разности соответствующих маркеров не превышают 5%, что не позволяет считать этот сигнал идентифицированным с помощью двух эталонов "маркер" и "девять". В действительности второй из подлежащих идентификации в данном примере сигналов получен при произнесении слова "стол".
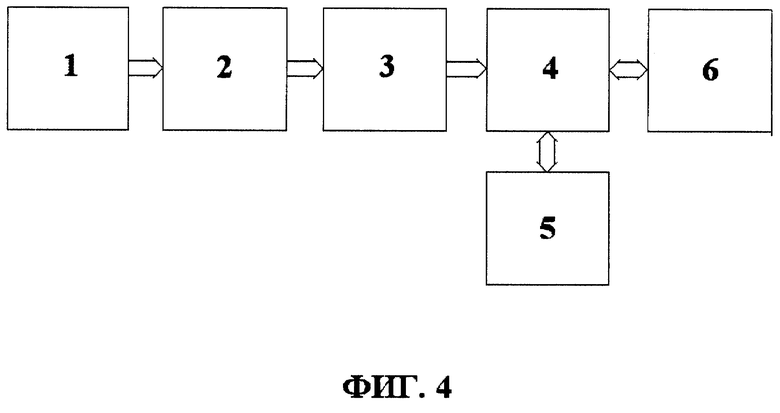
Реализация маркерного способа идентификации сигналов по настоящему изобретению для случая распознавания речи может быть осуществлена с помощью устройства, блок-схема которого показана на фиг.4. Это устройство включает в себя микрофон 1 (в общем случае это может быть любой источник аналоговых сигналов), аналогово-цифровой преобразователь (АЦП) 2, блок 3 предварительной обработки (например, фильтрация, нормировка и т.п.), блок 4, в котором реализуется непосредственно вычисление маркеров, машиночитаемую базу 5 данных и интерфейс 6 управления и выводов результатов. В этом устройстве сигнал от источника 1 (в данном случае микрофона) оцифровывается в АЦП 2, фильтруется и/или подвергается иной предварительной обработке в блоке 3 и поступает в блок 4, где осуществляется определение маркеров.
Этот блок 4 может быть выполнен на основе микропроцессора, в котором реализуется следующая последовательность операций с помощью соответствующей программы, хранящейся в памяти этого микропроцессора. Оцифрованные отсчеты входного сигнала интегрируются на заранее заданном временном интервале, что для дискретных сигналов можно выполнить путем простого суммирования их отсчетов. Следует заметить, что в АЦП 2 осуществляется дискретизация того информационного параметра, который выбран в конкретном выполнении способа по настоящему изобретению, т.е. в блок 4 поступают отсчеты, амплитудные значения которых соответствуют, к примеру, частоте или временной задержке. После интегрирования (суммирования дискретных отсчетов) микропроцессор в блоке 4 вычисляет заданное соотношение от найденного интеграла (к примеру, 1/2 или 7/20) и определяет тот момент времени, в котором это соотношение достигается. Данный момент времени на данном временном интервале запоминается в качестве очередного маркера для обрабатываемого сигнала в базе 5 данных. Если этот сигнал вводится в качестве эталонного, процедура на этом заканчивается. Если же данный сигнал является подлежащим идентификации, то блок 4 после нахождения всех его маркеров или одновременно с этим производит сравнение этих маркеров с маркерами, запомненными в базе 5 данных. При совпадении заранее заданного числа маркеров исследуемого сигнала с заранее заданной точностью с соответствующими маркерами одного из эталонных сигналов через интерфейс 6 выдается сигнал об идентификации исследуемого сигнала. В отсутствие такого совпадения интерфейс 6 выдает сигнал отказа от распознавания данного входного сигнала.
Следует отметить, что маркерный способ идентификации сигналов по данному изобретению применим не только к сигналам во временной области, но и к спектральным характеристикам сигналов. При этом в качестве исследуемого сигнала нужно использовать его спектр, тогда место временных интервалов займут частотные интервалы, а информационным параметром, помимо амплитуды, может быть фазовый сдвиг каждой спектральной составляющей, в остальном же способ не претерпевает никаких изменений.
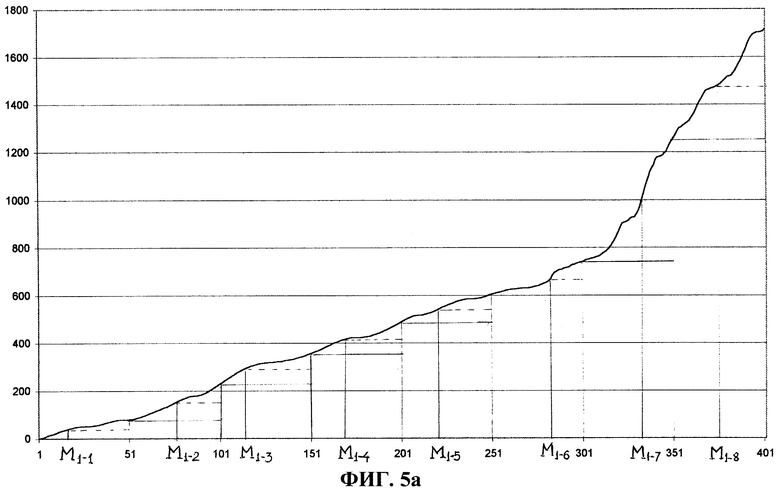
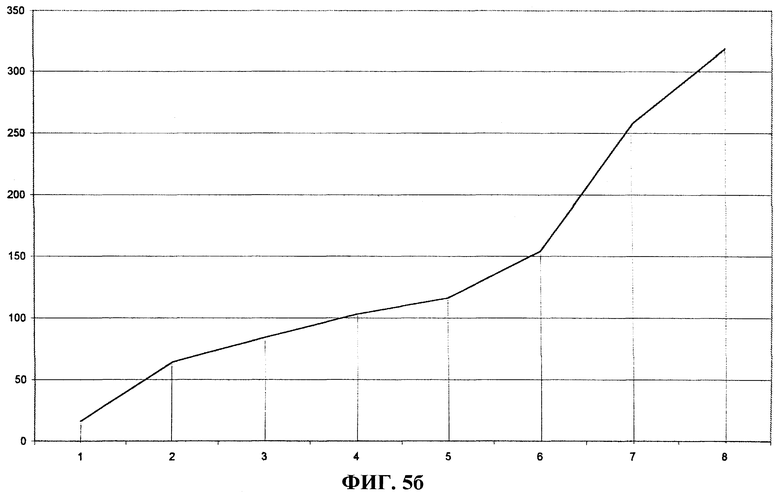
Маркерный способ идентификации сигналов по настоящему изобретению можно модифицировать следующим образом (фиг.5). Интервал, на котором вычисляется интеграл от заранее заданного информационного параметра сигнала, изменяют с заранее заданным шагом, каждый раз вычисляя новое значение интеграла от того же параметра на увеличенном (уменьшенном) интервале. Это условно показано на фиг. 5а как увеличение временного интервала в 2, 3, 4 и т.д. раз. В результате получается последовательность маркеров M1-1, M1-2, М1-3 и т.д. На фиг. 5б построена зависимость положения маркера M1-i (i от 1 до 8) от размера временного интервала. Далее эта зависимость сама рассматривается в качестве исследуемого сигнала, т. е. она разбивается на заранее заданные интервалы (которые могут и не совпадать с заранее заданными интервалами исходного сигнала) и для нее определяются свои маркеры, которые также могут отличаться от маркеров исходного сигнала. Очевидно, что данный процесс можно повторить для интервалов разбиения полученной зависимости (фиг.5б), определяя при этом новые маркеры, и т.д. В этом случае возрастает объем вычислений, но зато повышается и точность распознавания, т.к. учитывается более тонкая структура исследуемого сигнала.
Промышленная применимость
Маркерный способ идентификации сигналов по настоящему изобретению применим не только к распознаванию речи, как проиллюстрировано выше, но может использоваться и во многих других применениях. С его помощью можно, к примеру, распознавать характер целей по их радиолокационным либо гидроакустическим отражениям путем анализа спектра этих отражений с помощью маркеров в соответствии с данным изобретением. Данный способ применим также к распознаванию изображений, например телевизионных, путем анализа сигналов в каждой строке кадра либо вдоль каждого столбца в матрице пикселей. С помощью данного способа можно идентифицировать выход за допустимые пределы регулируемых параметров в различных системах управления. Специалисты смогут найти много иных областей применения маркерного способа идентификации сигналов по настоящему изобретению. Поэтому приведенное выше описание служит лишь иллюстративным целям и не предназначено для какого-либо ограничения данного способа, объем притязаний по которому определяется исключительно его формулой изобретения с учетом возможных эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАРКИРОВАНИЯ И РАСПОЗНАВАНИЯ СИГНАЛОВ | 2013 |
|
RU2510624C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА | 2000 |
|
RU2175148C1 |
| СПОСОБ КОНТАКТНО-РАЗНОСТНОЙ АКУСТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ | 2011 |
|
RU2451346C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2009 |
|
RU2416806C2 |
| СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЕЙ ЭВМ (ВАРИАНТЫ) | 2011 |
|
RU2459252C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА ПО ИЗОБРАЖЕНИЮ ЛИЦА | 2007 |
|
RU2382408C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЕРИФИКАЦИИ ЛИЧНОСТИ ПО ГОЛОСУ | 2008 |
|
RU2399102C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЭЛЕМЕНТОВ СЛОЖНОЙ СИСТЕМЫ В ПЕРЕМЕННЫХ УСЛОВИЯХ | 2020 |
|
RU2726027C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ПО ОСОБЕННОСТЯМ ДИНАМИКИ НАПИСАНИЯ ПАРОЛЯ | 2014 |
|
RU2543927C1 |
| СПОСОБ ГЛАЗ-ПРОЦЕССОРНОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЙ И ОПТИКО-ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2178915C2 |
Изобретение относится к распознаванию и идентификации сигналов. Его использование при распознавании речи и изображений позволяет получить технический результат в виде повышения точности идентификации сигналов. Способ заключается в том, что обрабатывают сигнал на заранее заданном интервале и запоминают в машиночитаемой базе данных всю информацию о найденных при этом характеристиках сигнала, причем обработку и запоминание характеристик выполняют сначала для эталонных сигналов, а затем для сигналов, подлежащих распознаванию, после чего сравнивают характеристики последних с характеристиками эталонных сигналов. Технический результат достигается благодаря тому, что при обработке интегрируют по меньшей мере один заранее заданный информационный параметр каждого сигнала на заранее заданном интервале и определяют для каждого из этих параметров сигнала на данном интервале маркер, представляющий собой точку, которая разделяет интервал на такие части, что отношение интеграла от данного информационного параметра на одной из этих частей к интегралу от этого же информационного параметра на другой из этих частей находится в заранее заданных пределах, после чего и запоминают всю информацию о найденных маркерах в машиночитаемой базе данных, а при сравнении в качестве сравниваемых характеристик используют маркеры идентифицируемых и эталонных сигналов. 6 з.п. ф-лы, 12 ил.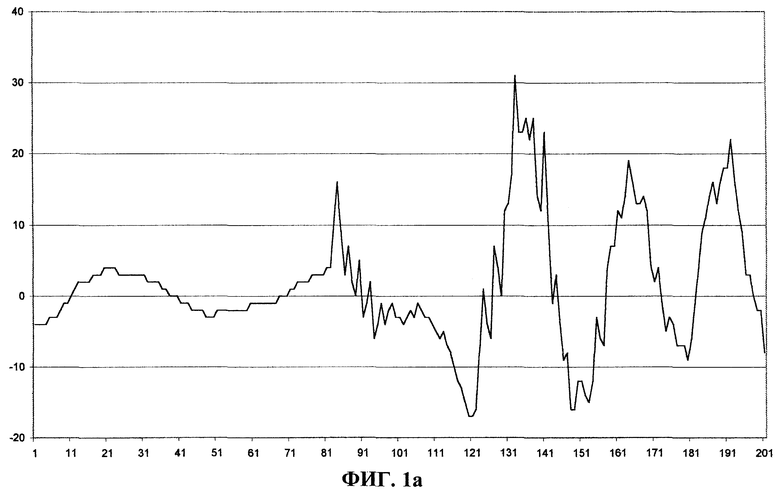
| US 5295190 A, 15.03.1994 | |||
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 1992 |
|
RU2090928C1 |
| US 4190820 A, 26.02.1980 | |||
| US 4783809 A, 08.11.1988 | |||
| US 4989257 A, 29.01.1991 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
