Изобретение относится к распознаванию и идентификации сигналов и может быть использовано в системах ограничения доступа к защищенным от посторонних лиц услугам, ресурсам и объектам, в системах распознавания речи, изображений и других сферах применения.
Известен способ проверки подлинности подписи (Патент США №4190820, МПК G06K 9/00, 26.02.1980), в котором сравниваются две последовательности сигналов с маркировочными знаками между нормированными к заданным шаблонам сегментами каждой последовательности путем подсчета числа этих маркировочных знаков в каждой последовательности и сравнения результатов этих подсчетов между собой. Этот способ имеет ограниченное применение и недостаточно высокую точность, поскольку ограниченное количество шаблонов и индивидуальные особенности каждой подписи могут привести к тому, что некоторые из выделенных сегментов будут отнесены не к тому шаблону.
Известен способ распознавания речи в реальном времени (Патент США №4783809, МПК G10L 5/06, 08.11.1999). По данному способу акустические характеристики неизвестной речи сопоставляются с заданными шаблонами, в результате чего выстраиваются цепочки эталонных шаблонов, которые сравниваются с запомненными цепочками. Недостаток этого способа тот же, что и у предыдущего: ограниченное количество шаблонов не всегда дает возможность точно сопоставить их звукам реальной речи.
Известен способ анализа сигналов о состоянии объекта (Патент РФ №2090928, МПК G06K 9/00, 20.09.1997), в котором сначала формируют несколько обучающих сигналов, по ним создают распознающий эталон, а затем сравнивают сигнал о состоянии объекта с этими распознающими эталонами. Каждый эталон представляет собой некоторое усреднение от нескольких обучающих сигналов, т.е. заведомо не может охватить всего разнообразия возможных исследуемых сигналов.
Устраняет перечисленные недостатки способ, являющийся наиболее близким к заявленному (Патент РФ №2189075, МПК G06K 9/62, G10L 15/2 10.09.2002). Способ состоит из следующих операций: выбирают заранее заданный интервал на каждом из нескольких эталонных сигналов; обрабатывают каждый эталонный сигнал на заранее заданном интервале, при этом интегрируют по меньшей мере один заранее заданный информационный параметр каждого эталонного сигнала на заранее заданном интервале, и определяют для каждого из заранее заданных информационных параметров каждого эталонного сигнала на заранее заданном интервале маркер, представляющий собой точку, которая разделяет этот интервал на такие части, что отношение интеграла от данного информационного параметра на одной из этих частей к интегралу от этого же информационного параметра на другой из этих частей находится в заранее заданных пределах, после чего и запоминают всю информацию о найденных маркерах в машиночитаемой базе данных в операции запоминания; для каждого сигнала, подлежащего распознаванию, при повторении операций выбора, обработки и запоминания осуществляют действия, аналогичные действиям операции интегрирования и определения маркера; в операции сравнения в качестве сравниваемых характеристик используют маркеры распознаваемых и эталонных сигналов; в операции принятия решения принимают решение об идентификации конкретного сигнала, если по меньшей мере заданное число маркеров сигнала, подлежащего идентификации, с заранее заданной точностью совпадает с соответствующими маркерами какого-либо из заранее заданных эталонных сигналов. Данный способ выбран в качестве прототипа.
Недостатком данного способа является низкая достоверность, выражающаяся в отсутствии учета формы сигнала при равных интегральных характеристиках, влияющих на расчет значения маркеров следующих интервалов сигнала на этапе обучения, а следовательно, и низкую достоверность распознавания сигналов только по маркерам на этапе распознавания.
Задачей изобретения является создание способа, позволяющего повысить достоверность распознавания сигналов при равенстве маркеров (интегральных значений сигнала на выделенном интервале) за счет более полного использования информации, характеризующей форму изменения сигнала в окрестности маркера.
Эта задача решается тем, что к действиям способа-прототипа, включающего этапы обучения и распознавания, на предварительном этапе выбирают значение интервала для представления сигнала в виде последовательности этих интервалов, для каждого интервала выполняют операции интегрирования и определяют маркер, представляющий собой точку, которая разделяет этот интервал на такие части, что отношение интеграла от данного информационного параметра на одной из этих частей к интегралу от этого же информационного параметра на другой из этих частей находится в заранее заданных пределах, запоминают всю информацию о найденных маркерах в машиночитаемой базе данных, при распознавании для каждого сигнала повторяют операции выбора, обработки и запоминания для зависимостей, найденных в операции принятия решения для эталонных сигналов, выполняют сравнение найденных зависимостей положения маркера, дополнительно на этапе обучения, после выполнения операции обработки сигнала и получения значения маркеров осуществляют следующие действия: для каждого эталонного сигнала Sj, содержащего интервалы с равными значениями маркеров Mi, в окрестности значения маркера выделяют участок сигнала, содержащий как минимум два значения: предыдущего и следующего за маркером отсчетов, характеризующих изменение физических параметров сигнала во времени, между двумя значениями выделенного участка сигнала относительно нулевого значения рассчитывают дополнительный признак - значение градусной меры угла 



Введение дополнительного признака - значения градусной меры угла
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - алгоритм, поясняющий способ маркирования и распознавания сигналов;
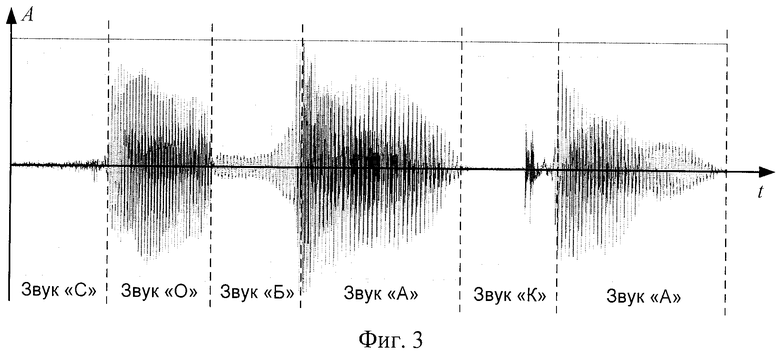
фиг.2 - геометрическая интерпретация множества фигур с равными площадями и одним для всех фигур маркером;
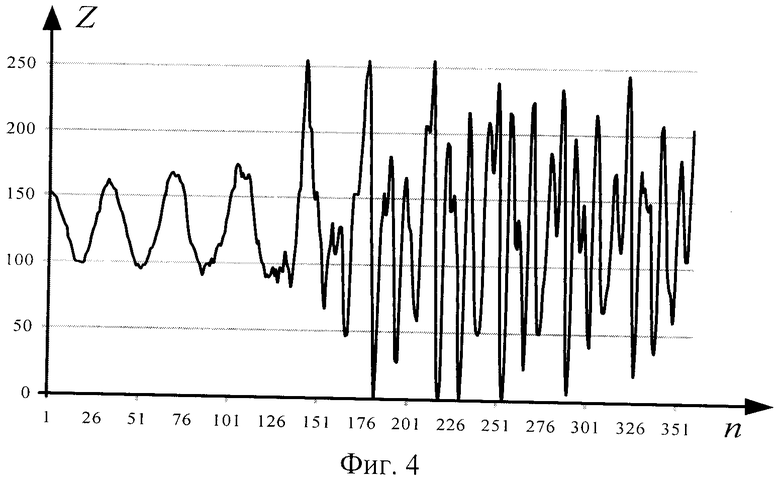
фиг.3 - развертка во времени амплитудных значений слова «собака» на русском языке;
фиг.4 - график цифровой последовательности отсчетов участка сигнала, соответствующего созвучию «ба» из слова «собака».
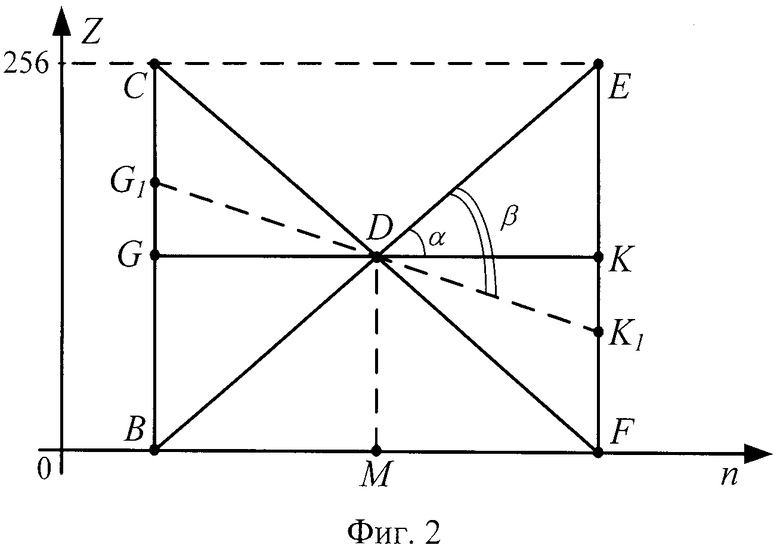
Для лучшего понимания сущности заявляемого способа на фигуре 1 представлен алгоритм способа маркирования и распознавания сигналов. Между терминаторами начала и конца (Моделирование систем: Учебник для вузов / Б.Я.Советов, С.А.Яковлев - 4-е изд., стер. - М.: Высшая школа. 2005. - С.93) алгоритм разбит на отдельные процедуры. Процедуры 3, 5-7 соответствуют этапу обучения, процедуры 9, 11-15 соответствуют этапу распознавания при идентификации сигнала. Блоки 2, 4, 8, 10 и 14 являются блоками выполнения условий. Блок 1 является блоком ввода данных, а блок 16 - блоком вывода данных. Ниже приведен перечень номеров, блоков ввода и вывода, процедур и блоков выполнения условий алгоритма:
1 - Блок ввода данных, учитывающий следующие переменные и константы:
S - множество сигналов, подлежащих распознаванию;
Z - максимальный уровень квантования, для представления сигнала в виде множества цифровых отсчетов;
n - количество отсчетов в каждом сигнале;
m - количество интервалов деления каждого сигнала.
2 - Блок выполнения условия, определяющий этап обучения при положительном исходе или этап распознавания и переход к блоку 3, а при отрицательном исходе или сформированной на раннем этапе обучения структуре векторов распознавания
3 - Блок процедуры расчета маркера Mi каждого интервала m для отдельного сигнала Si осуществляется интегрированием последовательности аналогового сигнала (по способу-прототипу) или суммированием последовательности цифровых отсчетов в пределах интервала и определением порядкового значения времени для аналоговых сигналов или отсчета для цифровых сигналов, разделяющего данный интервал сигнала на две равные части по значению интеграла или сумме.
4 - Блок выполнения условия, определяющий вычисление дополнительного признакового значения в вектор распознавания
5 - Блок выделения интервала в области (ВИвО) маркера Mi, осуществляет выделение соседних к маркеру отсчетов: предыдущего 


6 - Блок расчета градусной меры угла

7 - Блок записи вектора распознавания
8 - Блок выполнения условия, определяющий окончание этапа обучения при положительном исходе и переход к блоку 2, или продолжение этапа обучения при отрицательном исходе и переход к блоку 4.
9 - Блок процедуры расчета маркера Mi, осуществляет действия, аналогичные действиям блока 3.
10 - Блок выполнения условия, определяющий вычисление дополнительного признакового значения в вектор распознавания
11 - Блок выделения интервала в области (ВИвО) маркера Mj.
12 - Блок расчета градусной меры угла
13 - Блок формирования вектора распознавания
14 - Блок выполнения условия, определяющий последний интервал сигнала при положительном исходе и переход к блоку 15, или при отрицательном исходе переход к блоку 11.
15 - Блок вычисления показателя достоверности распознавания Q, равного отношению суммарного числа совпавших векторов распознавания
16 - Блок вывода пары значений Sj эталонного сигнала и показателя достоверности Q отнесения сигнала Si к эталонному Sj.
Низкая достоверность использования в качестве признака распознавания значения маркера на каждом интервале сигнала Si заключена в самой процедуре определения данного маркера, так как суммарные и интегральные значения не могут охватить всего многообразия форм сигналов именно при равных значениях маркеров. Подтверждение данного факта позволяет выявить геометрическая интерпретация, представленная на фигуре 2. Пусть маркер на интервале BF задан точкой М и образует с точкой пересечения сигнала отрезок DM. Количество простейших фигур в виде треугольников ΔCBF и ΔEFB, прямоугольника GKFB и трапеций с равными значениями площадей, и проходящих одной стороной через некоторую точку D, насчитывает общее число, равное значению Z - максимальной разрядности аналогово-цифрового преобразователя (в нашем случае Z=256). Данное утверждение следует из выражения, определяющего площадь трапеции Р в зависимости от значений высоты трапеции и длин прилегающих к ней сторон:

где a, b - прилегающие к высоте стороны трапеции,
h - высота трапеции.
На фигуре 2 общей высотой трапеций для множества трапеций, образованных в пределе параллельными отрезками СВ и EF, является отрезок BF. Любой отрезок, например G1K1, проходящий через точку D на отрезках СВ и EF, отсекает относительно отрезка BF прилегающие в высоте отрезки, определяющие площадь получаемой замкнутой геометрической фигуры по формуле 1. В случае пересечения отрезками граничных значений трапеции вырождаются в прямоугольные треугольники ACBF и ДЕЕВ, площадь которых также вычисляется по формуле 1. Различные фигуры с равными значениями площадей, например трапеция G1K1FB, и треугольник ΔEFB, различаются градусной мерой углов α и β относительно общей стороны BF. Таким образом, при равенстве значений маркеров на интервале достаточной и компактной формой представления характера изменения сигнала в интервале является градусная мера угла
Численное значение

где arcsin - функция арксинуса,
Z - максимальный уровень квантования для представления сигнала в виде множества цифровых отсчетов.
Для каждого интервала т и каждого сигнала распознавания формируются идентификаторы распознавания 

где 
Расчет показателя достоверности Q отнесения сигнала Si к эталонному Sj вычисляется выражением:

при

где di - мера сходства векторов в двухмерном пространстве,
dпорог - пороговое значение меры в двухмерном пространстве, допускающее объединение двух векторов в один класс распознавания.
Для расчета меры сходства di в двухмерном пространстве между векторами а и b достаточно использовать евклидово расстояние dab, вычисляемым по формуле (Теория распознавания и анализ сцен: Пер. с англ. / Р.О. Дуда, П.Е.Харт; Под. ред. В.Л.Стефанюка. М.: Мир, 1976. - 511 с.):

где k - количество признаков в векторе;
i - текущее значение вектора.
Предлагаемый способ является дополнением к способу-прототипу. Осуществляется одновременно со способом-прототипом, при этом процедура выделения дополнительных характеристических признаков происходит после определения значения маркера на интервале сигнала.
Реализацию маркерного способа распознавания сигналов поясним на следующем примере.
Имеется сигнальная последовательность звуков на русском языке, формирующаяся во времени во фразу «собака». Развертка во времени амплитудных значений слова «собака» на русском языке представлена на фигуре 3. Для дальнейшего анализа данного сигнала с ним провели процедуру нормализации цифрового сигнала по максимуму разрядности аналогово-цифрового преобразователя. График цифровой последовательности отсчетов участка сигнала, соответствующего созвучию «ба» из слова «собака», представлен на фигуре 4. Выделение данной последовательности осуществлено с целью показать факт равенства маркеров на равных выделенных интервалах для различных по форме сигналов. Так, на интервале из 47 отсчетов: с 1 по 47 отсчет для звука «Б» определен сигнал S1 и с 283 по 329 отсчет для звука «А» определен сигнал S2, для которых суммы отсчетов на интервале равны и составляют значение 6091. Значения отсчетов для равных интервалов различных сигналов S1 звука «Б» и S2 звука «А» со значениями равенства сумм отсчетов на данных интервалах приведены в таблице 1. Из равенства сумм интервалов следует одинаковое расположение маркеров для этих интервалов относительно времени сигнала и соответствующего ему порядкового значения отсчета.


Интервал из 47 отсчетов разделяется на две равные части порядковым значением маркера, равным 23. Соседние значения отсчетов относительно полученного маркера сведены в таблицу 2.
Для данных значений с помощью выражения 2 рассчитаем градусные меры углов для сигналов S1 звука «Б» и S2 звука «А».


С учетом полученных выражениями 6 и 7 значений идентификаторы распознавания для данных участков сигналов S1 звука «Б» и S2 звука «А» сведены в таблицу 3.


Расчет меры сходства di в двухмерном признаковом пространстве между векторами из таблицы 3 согласно выражению 5, в отличие от нулевого значения по способу-прототипу, по заявленному способу составит значение, равное 10,548. Это, в свою очередь, повысит показатель достоверности Q отнесения сигналов S1 звука «Б» и S2 звука «А» к различным классам, вычислением данного показателя выражениями 3 и 4.
Таким образом, введение в способ-прототип дополнительного признака - градусной меры угла
Проведенный анализ существующих способов позволил установить, что аналоги, тождественные признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна». Введенный отличительный признак - использование градусной меры угла

Способ маркирования и распознавания сигналов применим не только к распознаванию речи, как проиллюстрировано выше, но может использоваться и во многих других сферах. Данный способ применим также к распознаванию изображений. С помощью данного способа можно идентифицировать выход за допустимые пределы регулируемых параметров в различных системах управления. Этапы способа реализуемы на существующей в настоящее время элементной базе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ СИГНАЛОВ | 2012 |
|
RU2485586C1 |
| Способ транскрибирования речи по цифровым сигналам с низкоскоростным кодированием | 2023 |
|
RU2801621C1 |
| Способ пеленгации телефонных радиосигналов с амплитудной модуляцией | 2023 |
|
RU2798775C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2011 |
|
RU2464633C1 |
| Способ автоматической оценки качества речевых сигналов с низкоскоростным кодированием | 2021 |
|
RU2757860C1 |
| Способ измерения длительности импульсов | 2023 |
|
RU2805972C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СОСТОЯНИЯ ИССЛЕДУЕМОЙ СОЗДАЮЩЕЙ ШУМЫ МАШИНЫ | 2009 |
|
RU2494364C2 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ РЕЧЕВЫХ СИГНАЛОВ | 1996 |
|
RU2233010C2 |
| Устройство для распознавания слитно произнесенных слов | 1980 |
|
SU932299A1 |
Способ маркирования и распознавания сигналов относится к области кодирования, распознавания и идентификации сигналов. Технический результат заключается в повышении достоверности распознавания сигналов при равенстве маркеров (интегральных значений сигнала на выделенном интервале) за счет более полного использования информации, характеризующей форму изменения сигнала в окрестности маркера. Технический результат достигается за счет введения в образ сигнала на каждом его интервале дополнительного признака - градусной меры угла  и использование его вместе с маркерами в качестве идентификатора в двухмерном признаковом пространстве при распознавании позволяет повысить достоверность распознавания и количественно оценить ее значение при отнесении анализируемого сигнала к эталонному. 4 ил., 3 табл.
и использование его вместе с маркерами в качестве идентификатора в двухмерном признаковом пространстве при распознавании позволяет повысить достоверность распознавания и количественно оценить ее значение при отнесении анализируемого сигнала к эталонному. 4 ил., 3 табл.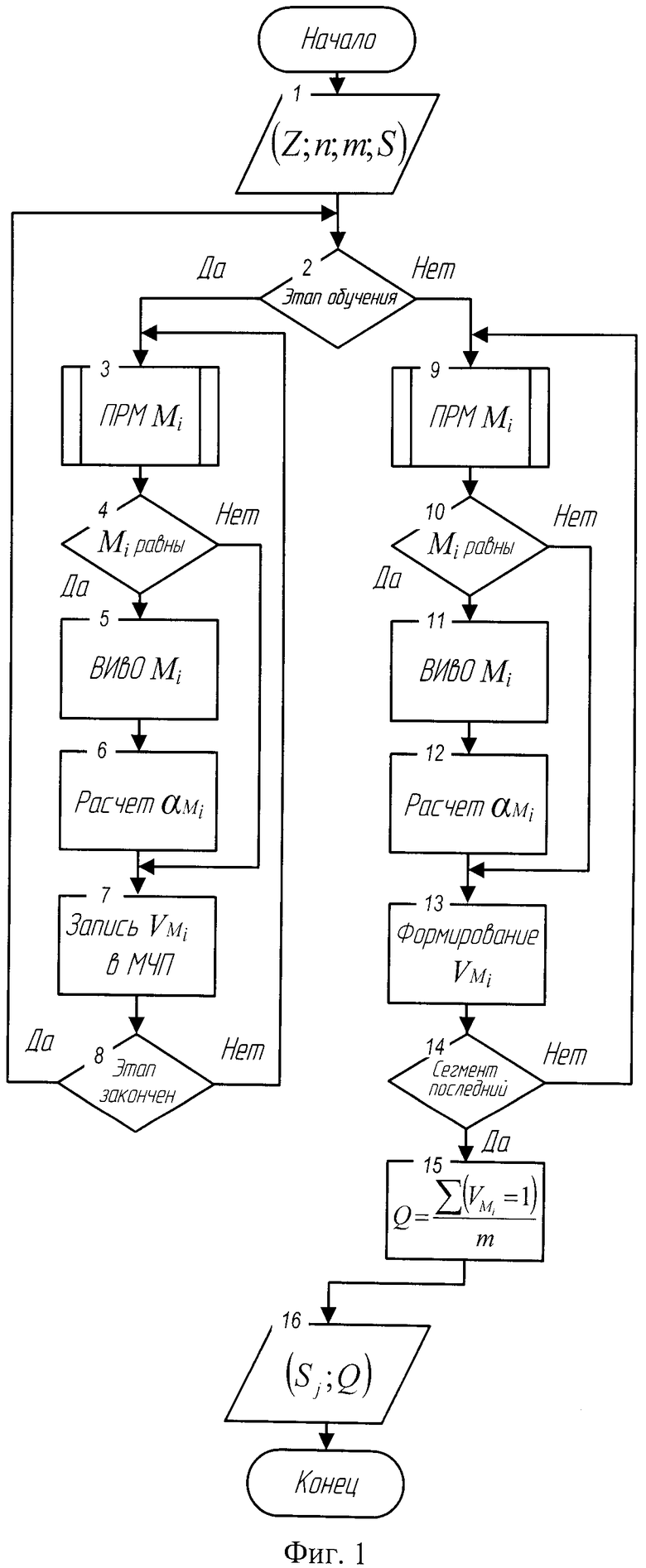
Способ маркирования и распознавания сигналов, включающий в себя предварительный этап, этап обучения и этап распознавания, при этом на предварительном этапе выбирают значение интервала для представления сигнала в виде последовательности этих интервалов, для каждого интервала выполняют операции интегрирования и определяют маркер, представляющий собой точку, которая разделяет этот интервал на такие части, что отношение интеграла от данного информационного параметра на одной из этих частей к интегралу от этого же информационного параметра на другой из этих частей находится в заранее заданных пределах, запоминают всю информацию о найденных маркерах в машиночитаемой базе данных, при распознавании для каждого сигнала повторяют операции выбора, обработки и запоминания для зависимостей, найденных в операции принятия решения для эталонных сигналов, выполняют сравнение найденных зависимостей, отличающийся тем, что на этапе обучения после выполнения операции обработки сигнала и получении значения маркеров дополнительно осуществляют следующие действия: для каждого эталонного сигнала Sj, содержащего интервалы с равными значениями маркеров Mi, в окрестности значения маркера выделяют участок сигнала, содержащий как минимум два значения: предыдущего и следующего за маркером отсчетов, характеризующих изменение физических параметров сигнала во времени, между двумя значениями выделенного участка сигнала относительно нулевого значения рассчитывают дополнительный признак - значение градусной меры угла  , им дополняют значение идентификатора интервала
, им дополняют значение идентификатора интервала  , в виде двумерного вектора из значений маркера Mi и градусной меры угла
, в виде двумерного вектора из значений маркера Mi и градусной меры угла  , идентификаторы интервалов для каждого эталонного сигнала Sj записывают в машиночитаемой памяти, на этапе распознавания для каждого интервала сигнала Si определяют маркеры Mi, для интервалов с равными значениями маркеров Mi, в окрестности значения маркера выделяют участок сигнала, содержащий как минимум два значения: предыдущего и следующего за маркером отсчетов, характеризующих изменение физических параметров сигнала во времени, между двумя значениями выделенного участка сигнала относительно нулевого значения рассчитывают значение градусной меры угла
, идентификаторы интервалов для каждого эталонного сигнала Sj записывают в машиночитаемой памяти, на этапе распознавания для каждого интервала сигнала Si определяют маркеры Mi, для интервалов с равными значениями маркеров Mi, в окрестности значения маркера выделяют участок сигнала, содержащий как минимум два значения: предыдущего и следующего за маркером отсчетов, характеризующих изменение физических параметров сигнала во времени, между двумя значениями выделенного участка сигнала относительно нулевого значения рассчитывают значение градусной меры угла  , им дополняют значение идентификатора интервала , по количеству совпавших значений идентификаторов всех интервалов сигнала Si рассчитывают показатель достоверности Q отнесения сигнала Si к эталонному Sj.
, им дополняют значение идентификатора интервала , по количеству совпавших значений идентификаторов всех интервалов сигнала Si рассчитывают показатель достоверности Q отнесения сигнала Si к эталонному Sj.
| МАРКЕРНЫЙ СПОСОБ ИДЕНТИФИКАЦИИ СИГНАЛА | 2000 |
|
RU2189075C2 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 1992 |
|
RU2090928C1 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 2007 |
|
RU2355028C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2004 |
|
RU2261476C1 |
| US 7515770 B2, 07.04.2009 | |||

