Предлагаемый пеленгатор относится к областям радиолокации, радионавигации и может быть использован для определения угловых координат источника излучения фазоманипулированного (ФМН) сигнала.
Известны устройства для пеленгации источников излучения сигналов (авт. свид. СССР 164.326, 558.584, 1.555.695, 1.591.664, 1.591.665, 1.602.203, 1.679.872, 1.730.924, 1.746.807, 1.832.947; патенты РФ 2.006.872, 2.003.131, 2.012.010, 2.010.258, 2.165.628. Космические траекторные измерения. Под редакцией П. А. Агаджанова и др. -М.: Сов. радио, 1969, с. 244-245; Кинкулькин И. Е. и др. Фазовый метод определения координат. -М.: Сов. радио, 1979 и другие).
Базовым устройством является "Фазовый пеленгатор" (патент РФ 2.165.628, G 01 S 3/00, 2000), который и выбран в качестве прототипа.
Указанный пеленгатор обеспечивает разрешение противоречия между требованиями к точности измерений и однозначности отсчета угловой координаты источника излучения ФМН-сигнала путем применения двух измерительных шкал: фазовой шкалы измерений - точной, но неоднозначной, и временной шкалы измерений - грубой, но однозначной.
Однако данный пеленгатор позволяет пеленговать источник излучения ФМН-сигнала только в данной плоскости и не обеспечивает возможности для определения параметров пеленгуемого ФМН-сигнала.
Технической задачей изобретения является расширение функциональных возможностей пеленгатора путем пеленгации источника излучения фазоманипулированного сигнала в пространстве и оценки его параметров.
Поставленная задача решается тем, что фазовый пеленгатор, содержащий измерительный и первый пеленгационный каналы, при этом измерительный канал состоит из последовательно включенных первой приемной антенны, первого приемника, первого перемножителя, второй вход которого также соединен с выходом первого приемника, первого узкополосного фильтра и фазовращателя на 90o, первый пеленгационный канал состоит из последовательно включенных второй приемной антенны, второго приемника, второго перемножителя, второй вход которого также соединен с выходом второго приемника, второго узкополосного фильтра, первого фазового детектора, второй вход которого соединен с первым выходом фазовращателя на 90o, и первого индикатора, из последовательно подключенных к выходу второго приемника первого блока регулируемой задержки, второй вход которого через первый экстремальный регулятор соединен с выходом первого фильтра нижних частот, третьего перемножителя, второй вход которого соединен с выходом первого приемника, первого фильтра нижних частот и первого измерительного прибора, при этом к второму выходу первого блока регулируемой задержки подключен второй индикатор, снабжен частотным детектором, триггером, блоком регистрации и вторым пеленгационным каналом, состоящим из последовательно включенных третьей приемной антенны, третьего приемника, четвертого перемножителя, второй вход которого также соединен с выходом третьего приемника, третьего узкополосного фильтра, второго фазового детектора, второй вход которого соединен с вторым выходом фазовращателя на 90o, и третьего индикатора, из последовательно подключенных к выходу третьего приемника второго блока регулируемой задержки, второй вход которого через второй экстремальный регулятор соединен с выходом второго фильтра нижних частот, пятого перемножителя, второй вход которого соединен с выходом первого приемника, второго фильтра нижних частот и второго измерительного прибора, причем к второму выходу блока регулируемой задержки подключен четвертый индикатор, к выходу первого приемника последовательно подключены частотный детектор, триггер и блок регистрации, приемные антенны размещены в виде геометрического прямого угла, в вершине которого расположена первая приемная антенна измерительного канала, общая для приемных антенн пеленгационных каналов.
Структурная схема предлагаемого фазового пеленгатора представлена на фиг. 1. Взаимное расположение приемных антенн изображено на фиг.2. Пеленгационные характеристики показаны на фиг.3 и 4. Временные диаграммы, поясняющие работу измерительного канала, изображены на фиг.5.
Фазовый пеленгатор содержит один измерительный и два пеленгационных канала. Измерительный канал состоит из последовательно включенных первой приемной антенны 1, первого приемника 3, первого перемножителя 5, второй вход которого также соединен с выходом приемника 3, первого узкополосного фильтра 7 и фазовращателя 9 на 90o. К выходу первого приемника 3 последовательно подключены частотный детектор 19, триггер 20 и блок 21 регистрации. Каждый пеленгационный канал состоит из последовательно включенных второй 2 (третьей 22) приемной антенны, второго (третьего) приемника 4(23), перемножителя 6(24), второй вход которого также соединен с выходом приемника 4(23), узкополосного фильтра 8(25), фазового детектора 10(26), второй вход которого соединен с первым (вторым) выходом фазовращателя 9 на 90o, и индикатора 11(27). К выходу приемника 4(23) последовательно подключены блок 13(29) регулируемой задержки, второй вход которого через экстремальный регулятор 17(33) соединен с выходом фильтра 15(31) нижних частот, перемножитель 14(30), второй вход которого соединен с выходом приемника 3, фильтр 15(31) нижних частот и измерительный прибор 18(34). К второму выходу блока 13(29) регулируемой задержки подключен индикатор 16(32). Последовательно включенные блок 13(29) регулируемой задержки, перемножитель 14(30) и фильтр 15(31) нижних частот образуют коррелятор 12(28).
Фазовый пеленгатор работает следующим образом.
Принимаемые ФМН-сигналы:
U1(t) = V1(t)•cos[Wc•t+ϕк(t)+ϕ1],
U2(t) = V2(t-τ1)•cos[Wc(t-τ1)+ϕк(t-τ1)+ϕ2],
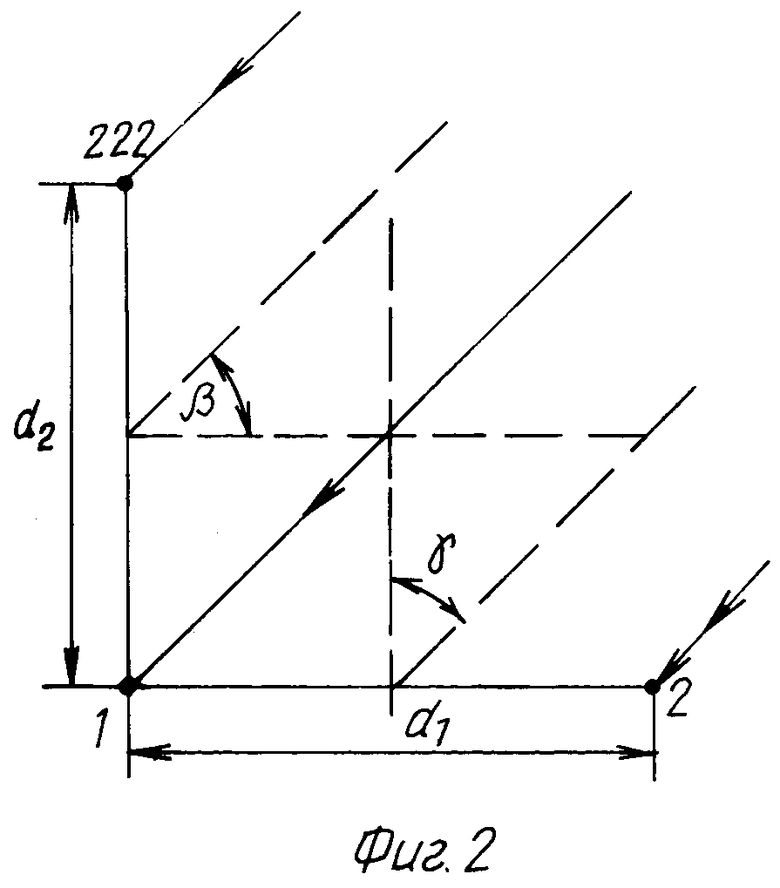
где V1(t), V2(t-τ1), V3(t-τ2), Wc, ϕ1, ϕ2, Tc - огибающие, несущая частота, начальные фазы и длительность сигналов; - время запаздывания сигнала, приходящего на антенну 2 по отношению к сигналу, приходящему на антенну 1 (фиг.2);
- время запаздывания сигнала, приходящего на антенну 2 по отношению к сигналу, приходящему на антенну 1 (фиг.2); - время запаздывания сигнала, приходящего на антенну 22 по с отношению к сигналу, приходящему на антенну 1;
- время запаздывания сигнала, приходящего на антенну 22 по с отношению к сигналу, приходящему на антенну 1;
d1...d2 - измерительные базы;
γ, β - углы прихода радиоволн в азимутальной и угломестной плоскостях;
с - скорость распространения света;
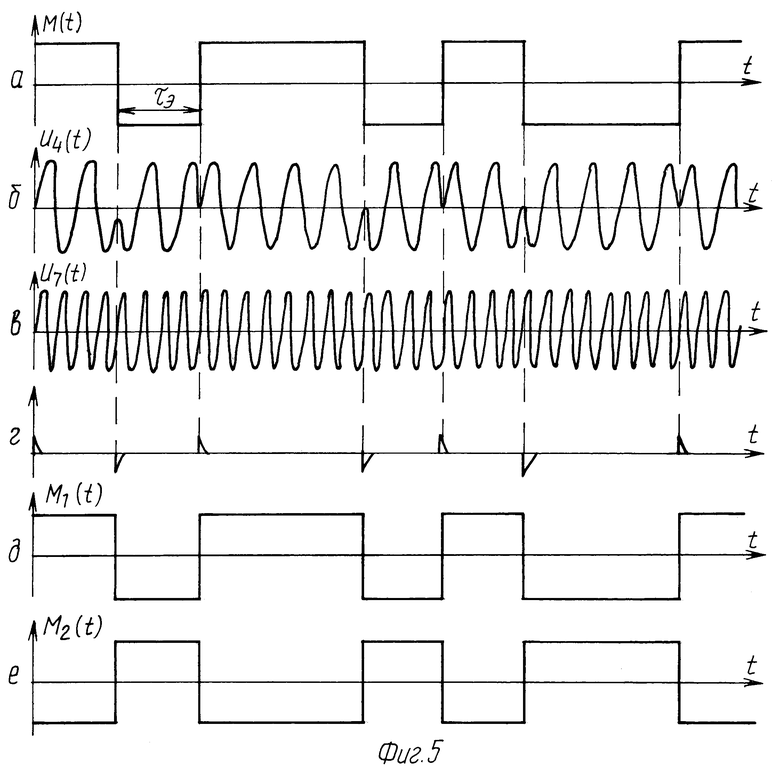
ϕк(t) = {0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующей функцией (кодом) M(t) (фиг. 5, а), причем ϕк(t) = const при Kτэ<t<(K+1)τэ и может измениться скачком при t = Kτэ, т.е. на границах между элементарными посылками (К=1, 2, ... N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc = N•τэ);
с выходов приемных антенн 1, 2 и 22 поступают на входы приемников 3, 4 и 23, где они усиливаются и ограничиваются по амплитуде:
U4(t) = Vo•cos[Wc•t+ϕк(t)+ϕ1],
U5(t) = Vo•cos[Wc(t-τ1)+ϕк(t-τ1)+ϕ2],
где = Vo - порог ограничения.
Указанные сигналы в перемножителях 5, 6 и 24 перемножаются сами на себя. В результате этого на выходах перемножителей 5, 6 и 24 образуются следующие результирующие напряжения (фиг.5, в):
U7(t) = V1•cos[2Wc•t+2ϕ1],
U8(t) = V1•cos[2Wc(t-τ1)+2ϕ2],
где V1=1/2 K1•V0 2;
К1 - коэффициент передачи перемножителей, которые представляют собой вторые гармоники канальных напряжений.
Следует отметить, что ширина спектра Δfc принимаемых ФМН-сигналов U1(t)÷U3(t) определяется длительностью τэ их элементарных посылок,
Δfc = 1/τэ,
тогда как ширина спектра вторых гармоник определяется длительностью Тс сигнала:
Δfг=1/Тс.
Следовательно, при перемножении ФМН-сигналов самих на себя их спектр сворачивается в N раз:
Δfc/Δfг = N.
Это обстоятельство позволяет выделить гармонические колебания U7(t)÷U9(t) с помощью узкополосных фильтров 7, 8 и 25, отфильтровав значительную часть шумов и помех.
Если гармонические колебания U7(t) и U8(t), U7(t) и U9(t) с выходов узкополосных фильтров 7, 8 и 25 непосредственно подать на фазовые различители 10 и 26, на выходе последних получим:
Uвых1(γ) = V2•cos(2π•d1/λsinγ),
Uвых1(β) = V2•cos(2π•d2/λsinβ),
где V2=1/2 K2•V1 2;
K2 - коэффициент передачи фазовых детекторов (фазовых различителей).
Из приведенных соотношений видно, что напряжения на выходе различителей зависят от углов γ и β, однако вследствие того, что косинус - функция четная, знаки Uвых1(γ) и Uвых1(β) не зависят от стороны отклонения. Для устранения указанного недостатка в измерительный канал включают фазовращатель 9, изменяющий фазу гармонического сигнала U7(t) на 90o. В этом случае напряжения рассогласования на выходе фазовых различителей 10 и 26 определяются выражениями:
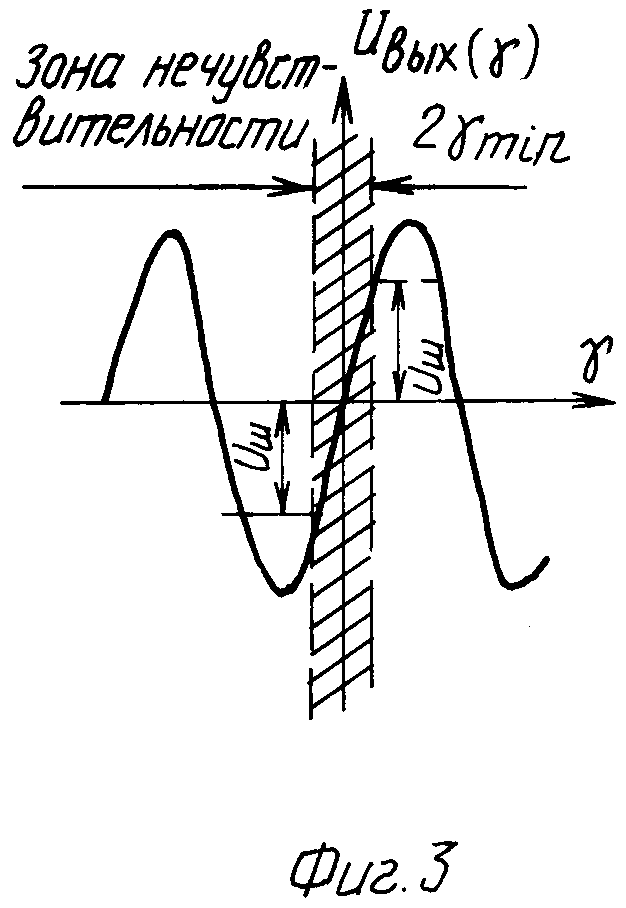
Uвых1(γ) = V2•sin(2π•d1/λsinγ),
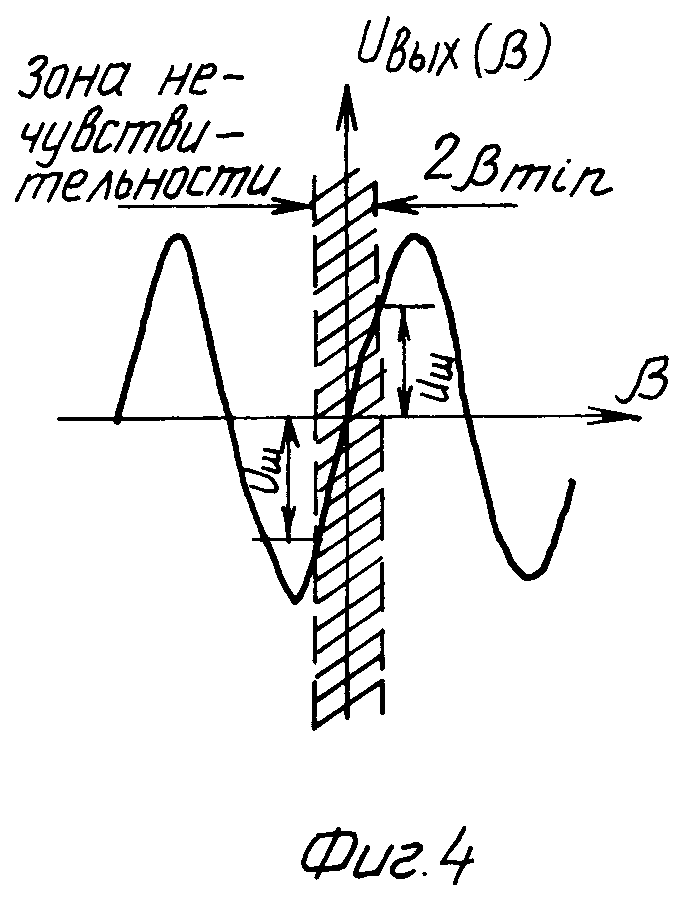
Uвых2(β) = V2•sin(2π•d2/λsinβ),
Приведенные зависимости обычно называются пеленгационными характеристиками (фиг.3,4).
Крутизна характеристик в области малых углов γ и β, где характеристики практически линейны, равна:
Таким образом, крутизна характеристик определяется величинами отношения d1/λ и d2/λ. Увеличение баз d1, d2 и уменьшение длины волны λ повышают крутизну Kγ и Kβ.
Однако при этом возрастает неоднозначность отсчета углов γ и β.
Крутизна характеристик определяет зоны нечувствительности 2γmin, 2βmin при заданном значении шумов Vш, (фиг.3,4).
Число зон неоднозначности, т. е. областей, где разности фаз Δϕ1 и Δϕ2 изменяются на величину, равную 2π, определяются соотношениями:
n1 = 2d1/λ,
n2 = 2d2/λ.
Для однозначного отсчета необходимо выбрать n1=1 и n2=1, т.е. выбрать измерительные базы исходя из следующих условий:
d1<λ/2;
d2<λ/2.
На выходе фазовых различителей 10 и 26 определяются разности фаз:
которые фиксируются индикаторами 11 и 27.
Так формируются фазовые шкалы отсчета угловых координат γ и β: точные, но неоднозначные.
Напряжения U4(t) и U5(t), U4(t) и U6(t) с выходов приемников 3 и 4, 3 и 23 одновременно поступают на два входа коррелятора 12(28), состоящего из блока 13(29) регулируемой задержки, перемножителя 14(30) и фильтра 15(31) нижних частот. Получаемые на выходе корреляторов 12 и 28 корреляционные функции R1(τ) и R2(τ), измеряемые измерительными приборами 18 и 34, имеют максимум при значении введенного регулируемого запаздывания:
τ1=t2-t1,
τ2=t3-t1,
где t1, t2, t3 - время прохождения сигналом расстояний R1, R2, R3 от источника излучений до первой 1, второй 2 и третьей 22 приемных антенн.
Максимальные значения R1(τ) и R2(τ) поддерживаются с помощью экстремальных регуляторов 17 и 33, воздействующих на вторые входы блоков 13 и 29 регулируемых задержек. Шкалы блоков 13 и 29 регулируемых задержек (указатели углов) градуируются непосредственно в значениях угловых координат γ и β источника излучения ФМН-сигнала:
где τ1, τ2 - введенные задержки сигнала, соответствующие максимуму корреляционных функций R1(τ) и R2(τ).
Значения угловых координат γ и β фиксируются индикаторами 16 и 32. Так формируются временные шкалы отсчета угловых координат γ и β: грубые, но однозначные.
По существу измерительными шкалами измеряются полные разности фаз:
ΔΦ1 = m+Δϕ1,
ΔΦ2 = n+Δϕ2,
где m, n - количества полных циклов измеряемых разностей фаз, определяемые временными шкалами;
Δϕ1, Δϕ2 - разности фаз, измеряемые фазовыми шкалами (0≤Δϕ1≤2π, 0≤Δϕ2≤2π).
Следует отметить, что расположение приемных антенн 1, 2 и 22 в виде геометрического прямого угла, в вершине которого располагается первая приемная антенна 1 измерительного канала, продиктовано самой идеологией пеленгации источника ФМН-сигнала в пространстве.
Принимаемый ФМН-сигнал U4(t) (фиг.5, 6) с выхода первого приемника 3 одновременно поступает на вход частотного детектора 19, на выходе которого образуется последовательность коротких разнополярных импульсов (фиг.5, г), положение которых на временной оси соответствует моментам скачкообразного изменения фазы принимаемого ФМН-сигнала. Полученные короткие импульсы поступают на счетный вход триггера 20. Каждый поступивший импульс перебрасывает триггер 20 в другое устойчивое состояние (триггер 20 имеет два устойчивых состояния). При этом на выходе триггера 20 формируется аналог модулирующего кода M(t) (фиг.5, а) в прямом M1(t) (фиг.5, д) или обратном M2(t) (фиг.5, е) кодах. При этом не принципиально, в прямом или обратном коде анализируется аналог модулирующей функции (коды). Это объясняется тем, что, анализируя аналог модулирующей функции M(t), выделяемой из принимаемого ФМН-сигнала в прямом M1(t) или обратном M2(t) коде, можно достоверно оценить его параметры (закон фазовой манипуляции, длительность τэ и количество N элементарных посылок). Выделение аналога модулирующей функции в прямом или обратном коде зависит от исходного состояния триггера 20. Выделенный аналог модулирующего кода фиксируется блоком регистрации 21, где и оцениваются параметры принимаемого ФМН-сигнала.
Таким образом, предлагаемый фазовый пеленгатор по сравнению с базовым объектом и другими устройствами аналогичного назначения обеспечивает пеленгацию источника излучения ФМН-сигнала в других плоскостях и оценку его параметров. Тем самым функциональные возможности фазового пеленгатора расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2206901C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2186696C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2213999C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2006 |
|
RU2325761C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427853C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
Предлагаемый пеленгатор относится к области радиолокации, радионавигации и может быть использован для определения угловых координат источника излучения фазоманипулированного (ФМН) сигнала. Достигаемым техническим результатом изобретения является расширение функциональных возможностей пеленгатора путем пеленгации источника излучения фазоманипулированного сигнала в пространстве и оценки его параметров. Фазовый пеленгатор содержит первую 1, вторую 2 и третью 22 приемные антенны, первый 3, второй 4 и третий 23 приемники, первый 5, второй 6, третий 14, четвертый 24 и пятый 30 перемножители, первый 7, второй 8 и третий 25 узкополосные фильтры, фазовращатель 9 на 90o, первый 10 и второй 26 фазовые детекторы, первый 11, второй 16, третий 27 и четвертый 32 индикаторы, первый 12 и второй 28 корреляторы, первый 13 и второй 29 блоки регулируемой задержки, первый 15 и второй 31 фильтры нижних частот, первый 18 и второй 34 измерительные приборы, первый 17 и второй 33 экстремальные регуляторы. 5 ил.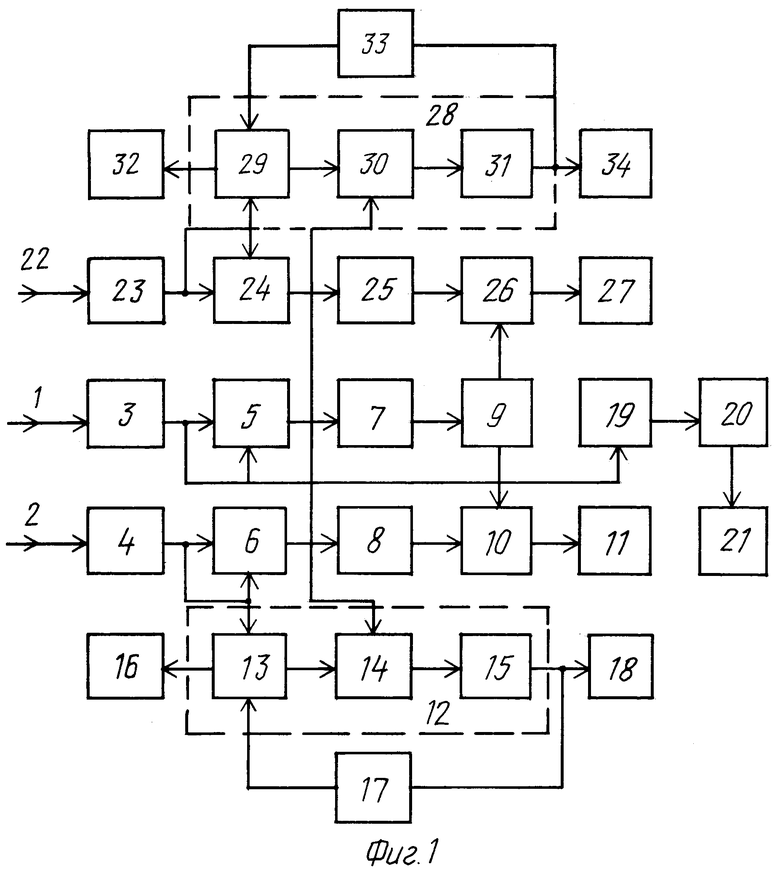
Фазовый пеленгатор, содержащий измерительный и первый пеленгационный каналы, при этом измерительный канал состоит из последовательно включенных первой приемной антенны, первого приемника, первого перемножителя, второй вход которого также соединен с выходом первого приемника, первого узкополосного фильтра и фазовращателя на 90o, первый пеленгационный канал состоит из последовательно включенных второй приемной антенны, второго приемника, второго перемножителя, второй вход которого также соединен с выходом второго приемника, второго узкополосного фильтра, первого фазового детектора, второй вход которого соединен с первым выходом фазовращателя на 90o, и первого индикатора, из последовательно подключенных к выходу второго приемника первого блока регулируемой задержки, второй вход которого через первый экстремальный регулятор соединен с выходом первого фильтра нижних частот, третьего перемножителя, второй вход которого соединен с выходом первого приемника, первого фильтра нижних частот и первого измерительного прибора, при этом к второму выходу первого блока регулируемой задержки подключен второй индикатор, отличающийся тем, что он снабжен частотным детектором, триггером, блоком регистрации и вторым пеленгационным каналом, состоящим из последовательно включенных третьей приемной антенны, третьего приемника, четвертого перемножителя, второй вход которого также соединен с выходом третьего приемника, третьего узкополосного фильтра, второго фазового детектора, второй вход которого соединен с вторым выходом фазовращателя на 90o, и третьего индикатора, из последовательно подключенных к выходу третьего приемника второго блока регулируемой задержки, второй вход которого через второй экстремальный регулятор соединен с выходом второго фильтра нижних частот, пятого перемножителя, второй вход которого соединен с выходом первого приемника, второго фильтра нижних частот и второго измерительного прибора, причем к второму выходу блока регулируемой задержки подключен четвертый индикатор, к выходу первого приемника последовательно подключены частотный детектор, триггер и блок регистрации, приемные антенны размещены в виде геометрического прямого угла, в вершине которого расположена первая приемная антенна измерительного канала, общая для приемных антенн пеленгационных каналов.
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2000 |
|
RU2165628C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2155352C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ СКВАЖИННОЙ МЕЖПРИБОРНОЙ СВЯЗИ | 2004 |
|
RU2351957C2 |
| GB 1593286, 15.07.1981 | |||
| US 4170774, 09.10.1979. | |||
