Предлагаемая система относится к спасательным средствам и может быть использована для обнаружения человека, терпящего бедствие на воде, и определения его местоположения.
Известны спасательные системы и устройства (а.с. СССР №№ 385.819, 431.063, 637.298, 765.113, 988.655, 1.348.819, 1.505.840, 1.588.636, 1.615.054, 1.643.325, 1.664.653; патенты РФ №№ 2.000.995, 2.009.956, 2.038.259, 2.043.259, 2.051.838, 2.177.437, 2.193.990, 2.226.479, 2.276.038, 2.299.832, 2.363.614; патенты США №№ 3.621.501, 4.889.511; патенты Великобритании №№ 1.145.051, 2.249.826; патент Франции № 2.638.705 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является «Система для обнаружения и определения местоположения человека, терпящего бедствие на воде» (патент РФ №2.276.038, В63С 9/20, 2004), которая и выбрана в качестве прототипа.
Указанная система использует радиопередатчик, которым снабжен человек, терпящий бедствие на воде, и вертолет, на борту которого установлена аппаратура для пеленгации радиопередатчика и определения его местонахождения.
Определение расстояния от вертолета до человека, терпящего бедствие на воде, в известной системе основано на использовании доплеровского сдвига частоты. Однако относительное значение доплеровского сдвига частоты

где FД - доплеровский сдвиг частоты;
fc - несущая частота принимаемого сигнала, пропорциональное отношению скоростей

где VR - радиальная составляющая скорости вертолета;
С - скорость распространения радиоволн, не превышает 10-4.
В этих условиях выделение доплеровского сдвига частоты требует использования колебательных контуров с очень высокой, практически недостижимой, добротностью.
Следовательно, измерение доплеровского сдвига частоты в ряде случаев производится с большой погрешностью или вообще невозможно.
Технической задачей изобретения является повышение точности определения расстояния от вертолета до человека, терпящего бедствие на воде, путем использования равносигнального направления приемных антенн, установленных на противоположных концах лопастей несущего винта вертолета, относительно источника радиоизлучений, размещенного на человеке, терпящего бедствие на воде.
Поставленная задача решается тем, что система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - заспинной его области, два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположены в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчики через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и двух пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, четвертого узкополосного фильтра первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом приемной антенны, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, первого регулируемого фазовращателя, второй вход которого соединен с выходом калибратора, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, второго амплитудного детектора, ключа, второй вход которого соединен с выходом четвертого сумматора, четвертого смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, первого амплитудного детектора и блока регистрации, из последовательно подключенных к второму выходу первого гетеродина первого фазовращателя на 90°, второго регулируемого фазовращателя, второй вход которого соединен с выходом калибратора, четвертого усилителя первой промежуточной частоты и второго фазовращателя на 90°, выход которого соединен с вторым входом четвертого сумматора, из последовательно подключенных к выходу первого усилителя первой промежуточной частоты шестого узкополосного фильтра, третьего амплитудного детектора, первого вычитателя, первого фильтра нижних частот и первого инверсного усилителя, два входа которого соединены с вторыми входами первого и четвертого усилителей первой промежуточной частоты соответственно, из последовательно подключенных к выходу четвертого усилителя первой промежуточной частоты седьмого узкополосного фильтра и четвертого амплитудного детектора, выход которого соединен с вторым входом первого вычитателя, из последовательно подключенных к выходу шестого узкополосного фильтра второго фазового детектора, второй вход которого соединен с выходом седьмого узкополосного фильтра, второго фильтра нижних частот и второго инверсного усилителя, два выхода которого соединены с третьими входами первого и второго регулируемых фазовращателей соответственно, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличается от ближайшего аналога тем, что она снабжена пятым сумматором, вторым вычитателем, блоком деления, пороговым блоком, триггером, генератором счетных импульсов, логическим элементом И, счетчиком импульсов и арифметическим блоком, причем к выходу первой приемной антенны первого пеленгационного канала последовательно подключены пятый сумматор, второй вход которого соединен с выходом второй приемной антенны второго пеленгационного канала, блок деления, второй вход которого через второй вычитатель соединен с выходом первой и второй приемных антенн первого и второго пеленгационных каналов, пороговый блок, триггер, логический элемент И, второй вход которого соединен с выходом генератора счетных импульсов, счетчик импульсов, вход сброса которого соединен с выходом порогового блока, и арифметический блок, выход которого соединен с вторым входом блока регистрации.
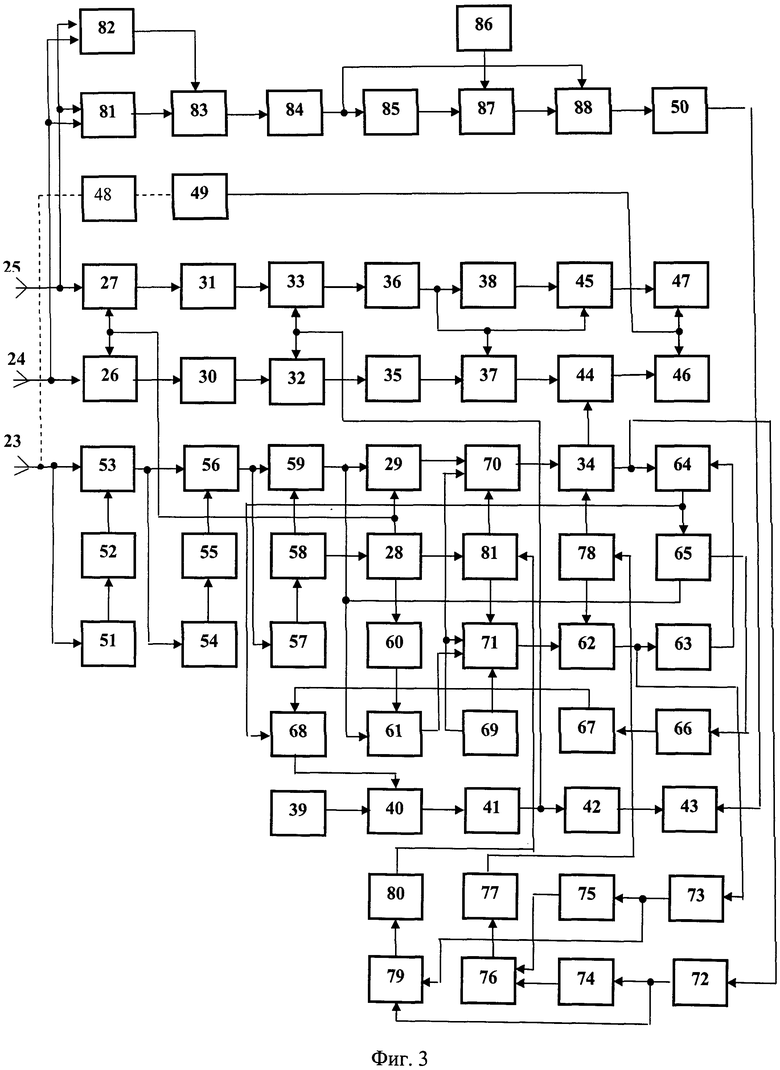
На фиг.1 схематично изображен спасательный жилет с источниками света 1, 2 и передатчиками 19, 20 с передающими антеннами 21, 22, надетый на человека; фиг.2 - то же, разрез. Структурная схема аппаратуры, установленной на борту вертолета, представлена на фиг.3. Геометрическая схема расположения приемных антенн на вертолете изображена на фиг.4. Частотная диаграмма, поясняющая процесс образования дополнительных (зеркального и комбинационных) каналов приема, представлена на фиг.5. Примеры образования интермодуляционных помех показаны на фиг.6 и 7. Временные диаграммы, поясняющие работу системы изображены на фиг.8.
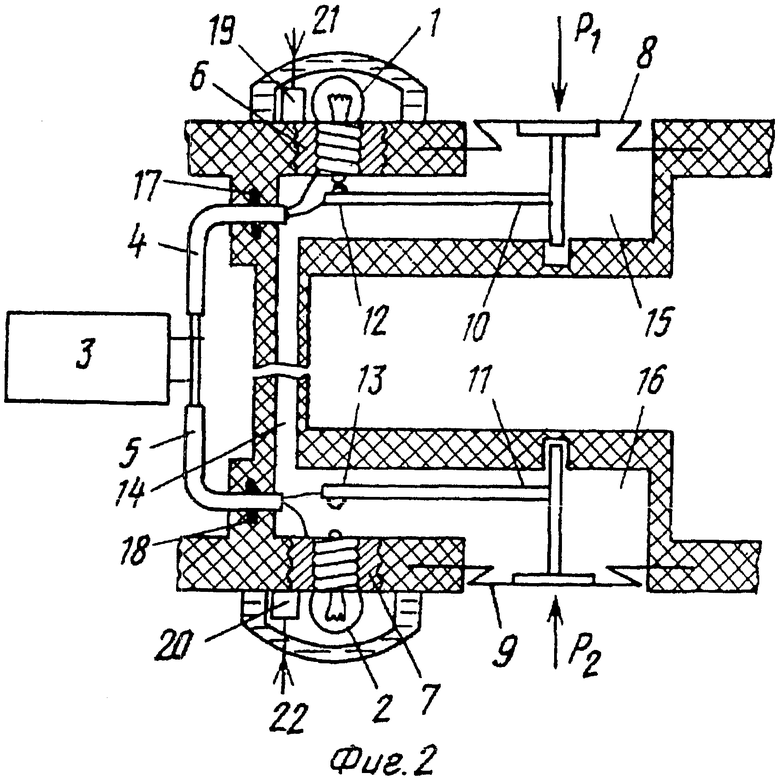
Спасательный жилет, кроме того, содержит источник 3 энергии, кабели 4 и 5 подвода энергии к источникам света 1 и 2 и передатчикам 19, 20, патроны 6, 7, мембраны 8, 9 и связанные с ними рычаги 10, 11 с контактами 12, 13, а также герметичную пневмомагистраль 14, связывающую герметичные воздушные полости 15, 16. Места ввода кабелей 4 и 5 от источника энергии 3 в полости 15 и 16 загерметизированы уплотнительными кольцами 17 и 18. Источник света 1 и передатчик 19, источник света 2 и передатчик 20 подключены параллельно к источнику энергии 3.
Аппаратура, размещаемая на борту вертолета, содержит один измерительный и два пеленгационных канала.
Измерительный канал состоит из последовательно включенных приемной антенны 23, четвертого узкополосного фильтра 51, первого фазоинвертора 52, первого сумматора 53, второй вход которого соединен с выходом приемной антенны 23, первого полосового фильтра 54, второго фазоинвертора 55, второго сумматора 56, второй вход которого соединен с выходом сумматора 53, второго полосового фильтра 57, третьего фазоинвертора 58, третьего сумматора 59, второй вход которого соединен с выходом сумматора 56, первого смесителя 29, второй вход которого соединен с первым выходом первого гетеродина 28, первого регулируемого фазовращателя 70, второй вход которого соединен с выходом калибратора 69, первого усилителя 34 первой промежуточной частоты, четвертого сумматора 64, четвертого перемножителя 65, второй вход которого соединен с выходом сумматора 59, пятого узкополосного фильтра 66, второго амплитудного детектора 67, второй вход которого соединен с выходом сумматора 64, четвертого смесителя 40, второй вход которого соединен с выходом второго гетеродина 39, усилителя 41 второй промежуточной частоты, первого амплитудного детектора 42 и блока 43 регистрации. К второму выходу первого гетеродина 28 последовательно подключены первый фазовращатель 60 на 90°, пятый смеситель 61, второй вход которого соединен с выходом сумматора 59, второй регулируемый фазовращатель 71, второй вход которого соединен с выходом калибратора 69, четвертый усилитель 62 первой промежуточной частоты и второй фазовращатель 53 на 90°, выход которого соединен с вторым входом сумматора 64. К выходу усилителя 34 первой промежуточной частоты последовательно подключены шестой узкополосный фильтр 72, третий амплитудный детектор 74, вычитатель 76, первый фильтр 77 нижних частот и первый инверсный усилитель 78, два входа которого соединены с вторыми входами усилителей 34 и 62 первой промежуточной частоты соответственно. К выходу усилителя 62 первой промежуточной частоты последовательно подключены седьмой узкополосный фильтр 73 и четвертый амплитудный детектор 75, выход которого соединен с вторым входом вычитателя 76. К выходу узкополосного фильтра 72 последовательно подключены второй фазовый детектор 79, второй вход которого соединен с выходом узкополосного фильтра 73, второй фильтр 80 нижних частот и второй инверсный усилитель 81, два выхода которого соединены с третьими входами регулируемых фазовращателей 70 и 71 соответственно.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 24(25), смесителя 26(27), второй вход которого соединен с первым выходом первого гетеродина 28, усилителя 30(31) первой промежуточной частоты, перемножителя 32(33), второй вход которого соединен с выходом усилителя 41 второй промежуточной частоты, и узкополосного фильтра 35(36). К выходу первого узкополосного фильтра 35 последовательно подключены третий перемножитель 37, второй вход которого соединен с выходом второго узкополосного фильтра 36, третий узкополосный фильтр 44 и первый фазометр 46, второй вход которого соединен с выходом опорного генератора 49. К выходу второго узкополосного фильтра 36 последовательно подключены линия 38 задержки, первый фазовый детектор 45, второй вход которого соединен с выходом узкополосного фильтра 36, и второго фазометра 47, второй вход которого соединен с выходом опорного генератора 49.
Приемная антенна 23 измерительного канала размещена над втулкой винта вертолета, приемные антенны 24 и 25 пеленгационных каналов размещены на концах лопастей винта вертолета. Двигатель 48 кинетатически связан в винтом вертолета и опорным генератором 49.
Система работает следующим образом.
В положении, показанном на фиг.2, давление окружающей среды P2 на мембрану 9 больше, чем атмосферное давление P1 на мембрану 8. Мембрана 9 находится в подвижном, а мембрана 8 - в отжатом состоянии. Соответственно рычаг 11 отжимает контакт 13 от источника 2 света и передатчика 22, а рычаг 10 поджимает контакт 12 к источнику 1 света и передатчику 19. Источник 1 света загорается, передатчик 19 излучает сигнал бедствия, источник 2 света не горит, передатчик 33 не работает.
Если человек совершает поворот относительно горизонтальной оси на 180°, то тогда наверху оказывается источник 2 света и передатчик 20 с передающей антенной 22. Давление среды на мембрану 8 становится больше, чем на мембрану 9, мембрана 8 поджимает рычаг 10, размыкает контакт 12 и источник 1 света и передатчик 19. Цепь размыкается, источник 1 света гаснет, передатчик 19 выключается. Одновременно воздух из полости 15 перетекает через магистраль 14 в полость 16, мембрана 9 отжимается, рычаг 11 замыкает контакт 13 с источником 2 света и передатчиком 20. Источник 2 света загорается, а передатчик 20 излучает сигнал бедствия.
В ночное время и в хорошую погоду источник света может быть обнаружен визуально на значительном расстоянии. Однако в светлое время и в плохую погоду обнаружить источник света затруднительно.
Радиоизлучение является всепогодным и обеспечивает передачу сигнала бедствия на большие расстояния. При этом сигнал бедствия (SOS) излучается периодически с определенным периодом Тп и длительностью Тс на определенной частоте ωс, которая отводится специально для передачи сигнала бедствия и не занимается для передачи другой информации.
Приемная аппаратура размещается на борту вертолета. Наличие вращающегося винта вертолета может быть использовано для определения направления на источник излучения сигнала бедствия (радиодатчик РД) с помощью устройства, антенны которого расположены на концах лопастей несущего винта.
Принимаемые сигналы бедствия, например, с фазовой манипуляцией (ФМн):



где U1, U2, U3, ωc, φk, Tc - амплитуда, несущая частота, начальная фаза и длительность сигнала бедствия;
±Δω - нестабильность несущей частоты сигнала, обусловленная различными дестабилизирующими факторами;
R - радиус окружности, на котором размещены приемные антенны 24 и 25;
'Ω=2πR - скорость вращения приемных антенн 24 и 25 вокруг приемной антенны 23 (скорость вращения винта вертолета);
α - пеленг (азимут) на источник излучения сигнала бедствия;
φk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем φk(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (k=1, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc=NτЭ);
с выхода приемных антенн 23, 24 и 25 поступают на первые входы смесителей 29, 61, 26 и 27, на вторые входы которых подаются напряжения первого гетеродина 28:


В этом случае работает только одно плечо сумматоров 53, 56 и 59. На выходе смесителей образуются напряжения комбинационных частот. Усилителями 34, 62, 30 и 31 выделяются напряжения первой промежуточной частоты:




где 
ωпр1=ωс-ωг1 - первая промежуточная частота;
φпр1=φс1-φГ1; φпр2=φc2-φГ1;
К1, К2 - коэффициенты передачи первого и второго приемных каналов;
φс1 φс2 - начальные фазы сигналов, прошедших первый и второй приемные каналы.
Напряжение Uпр2(t) с выхода усилителя 62 первой промежуточной частоты поступает на вход фазовращателя 63 на 90°, на выходе которого образуется напряжение:

Напряжения Uпр1(t) и Uпр5(t) поступают на два входа сумматора 64, на выходе которого образуется суммарное напряжение

где U∑1=Uпр1+Uпр2.
Это напряжение подается на первый вход перемножителя 65, на второй вход которого поступает принимаемый сигнал u1(t) с выхода сумматора 59. На выходе перемножителя 65 образуется гармоническое напряжение

где 
К3 - коэффициент передачи перемножителя.
Частота настройки ωн1 узкополосного фильтра 51 выбрана равной первой промежуточной частоты ωпр1 (ωн1=ωпр1).
Частота настройки ωн2 узкополосного фильтра 66 выбрана равной частоте ωГ1 первого гетеродина 28 (фиг.5): ωн2=ωГ1.
Частота настройки ωн3 и полоса пропускания Δωп1 полосового фильтра 54 выбраны равными (фиг.6) ωн3=(ω1+ω2)/2; Δωп1=ω2-ω1,
где ω1, ω2 - граничные частоты двух возможных мощных сигналов, появление которых в полосе частот Δωп1, расположенной "слева" от полосы пропускания Δωп1 приемника, приведет к образованию интермодуляционных помех.
Частота настройки ωн4 и полоса пропускания Δωп2 полосового фильтра 67 выбраны равными (фиг.7):
ωн4=(ω4+ω3)/2; Δωп2=ω4-ω3,
где ω3, ω4 - граничные частоты двух возможных мощных сигналов, появление которых в полосе частот Δωп2, расположенной "справа" от полосы пропускания Δп приемника, приведет к образованию интермодуляционных помех.
Так как частота настройки ωн2 узкополосного фильтра 66 выбрана равной частоте ωГ1 первого гетеродина 28(ωн2=ωГ1), то напряжение u4(t) выделяется узкополосным фильтром 66, детектируется амплитудным детектором 67 и поступает на управляющий вход ключа 68, открывая его. Ключ 68 в исходном состоянии всегда закрыт. При этом суммарное напряжение u∑(t) через открытый ключ 68 с выхода сумматора 84 поступает на первый вход смесителя 40, на второй вход которого подается напряжение второго гетеродина 39:
uu2(t)=Uг2cos(ωГ2t+φГ2).
На выходе смесителя 40 образуется напряжение комбинационных частот. Усилителем 41 выделяется напряжение второй промежуточной частоты

где 
К4 - коэффициент передачи смесителя;
ωпр6=ωпр1-ωГ2 - вторая промежуточная частота;
φпр6=φпр2-φГ2,
которое после детектирования в амплитудном детекторе 42 поступает на первый вход блока 43 регистрации и тем самым фиксирует обнаружение источника радиоизлучений (человека, терпящего бедствие на воде).
Напряжение uпр6(t) с выхода усилителя 41 второй промежуточной частоты одновременно подается на вторые входы перемножителей 32 и 33, на первые входы которых поступают напряжения uпр3(t) и uпр4(t) с выходов усилителей 30 и 31 первой промежуточной частоты соответственно. На выходах перемножителей 32 и 33 образуются фазомодулированные (ФМ) напряжения:


где 
которые выделяются узкополосными фильтрами 35 и 36 с частотой настройки ωн5=ωг2. Знаки "+" и "-" перед величиной 
Следовательно, полезная информация о пеленге α переносится на стабильную частоту ωГ2 второго гетеродина 39. Поэтому нестабильность ±Δω несущей частоты, вызванная различными дестабилизирующими факторами, и вид модуляции принимаемых сигналов бедствия не влияют на результат пеленгации, тем самым повышается точность определения местоположения источника радиоизлучений.
Причем величина 
Следовательно, при R/λ>1/2 наступает неоднозначность отсчета угла α.
Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации радиоисточника РД в горизонтальной (азимутальной) плоскости приемные антенны 24 и 25 располагаются на концах лопастей несущего винта вертолета. Смешение сигналов от двух диаметрально противоположных приемных антенн, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывают фазовую модуляцию, которая идентична фазовой модуляции, получаемой с помощью одной приемной антенны, вращающейся по кругу, радиус R1 которого в два раза больше (R1=2R).
Действительно, на выходе перемножителя 37 образуется гармоническое напряжение

где 
с индексом фазовой модуляции
которое выделяется узкополосным фильтром 44 и поступает на первый вход фазометра 46, на второй вход которого подается напряжение опорного генератора 40: u0(t)=U0cosΩt.
Фазометр 46 обеспечивает точное, но неоднозначное измерение угловой координаты α. Для устранения возникающей при этом неоднозначности отсчета угла α необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ. Это достигается использованием автокоррелятора, состоящего из линии 38 задержки и фазового детектора 45, что эквивалентно уменьшению индекса фазовой модуляции до величины
где d1<R.
На выходе автокоррелятора образуется напряжение
U8(t)=U7Cos(Ω-α), 0<t<Tc,
с индексом фазовой модуляции Δφm2, которое поступает на первый вход фазометра 47, на второй вход которого подается напряжение U0(t) опорного генератора 49. Фазометр 47 обеспечивает грубое, но однозначное измерение угла α.
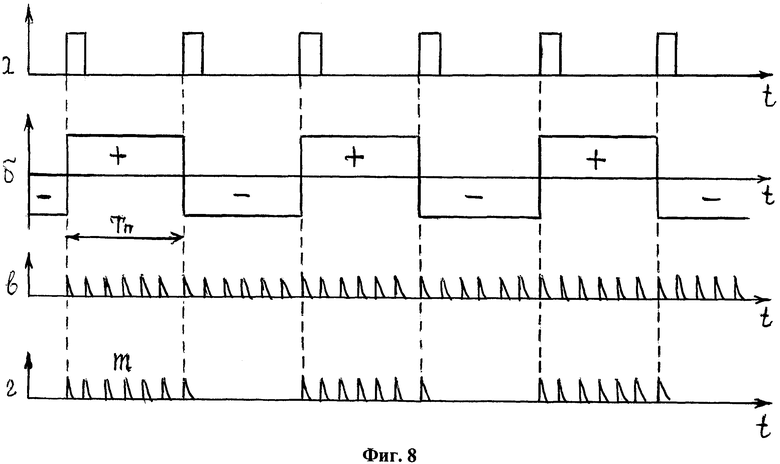
Минимальное расстояние R0 от радиодатчика РД, размещенного на человеке, терпящем бедствие на воде, до винта вертолета можно определить, используя равносигнальное направление приемных антенн 24 и 25, размещенных на противоположных концах лопастей несущего винта вертолета, при котором амплитуды U2 и U3 сигналов, принимаемых этими антеннами, приблизительно равны (U2≈U3). Эти амплитуды суммируются в сумматоре 81 (U∑=U2+U3) и вычитаются в вычитателе 82 (Up=U2-U3). Полученная суммарная амплитуда U∑ и разностная амплитуда Up делятся в блоке 83 деления UL=U∑/Up, на выходе последнего образуется максимальное напряжение Uдmax, которое превышает пороговое напряжение Uпор в пороговом блоке 84. Такое превышение возможно только тогда, когда приемные антенны 24 и 25 в процессе вращения проходят равносигнальное направление (фиг.4). При превышении порогового уровня Uпор в пороговом блоке 88 формируются короткие положительные импульсы (фиг.8, а). За счет вращения с угловой скоростью Ω приемных антенн 24 и 25 вокруг неподвижной антенны 23 радиодатчик РД будет периодически с периодом Тп находиться на равносигнальном направлении приемных антенн 24 и 25. При этом дальность R0 до РД можно оценить по формуле
где Тп - период повторения (фиг.8), который измеряется счетным методом.
Для этого последовательность коротких положительных импульсов (фиг.8, а) с выхода порогового блока 84 поступает на счетный вход триггера 85 и на вход сброса счетчика 88. Каждый поступивший короткий положительный импульс перебрасывает триггер 85 в противоположное состояние. Триггер 85 имеет два устойчивых состояния. При этом формируется последовательность разнополярных прямоугольных импульсов (фиг.8, б), длительность каждого из которых равна периоду повторения Тп.
Сформированные разнополярные прямоугольные импульсы поступают на первый вход логического элемента 87, на второй вход которого подаются счетные импульсы с выхода генератора 86 счетных импульсов (фиг.8, в). На выходе логического элемента И 87 выделяются только счетные импульсы, соответствующие по времени положительным прямоугольным импульсам (фиг.8, г). Количество m счетных импульсов, укладывающихся в периоде повторения Тп, подсчитывающихся счетчиком 88 импульсов, продвигаются короткими положительными импульсами (фиг.8,а) в арифметический блок 50. Указанные импульсы поступают на вход сброса счетчика 88 импульсов, проталкивают эти импульсы на выход и сбрасывают содержимое счетчика 88 импульсов на нулевое значение, подготавливая его к дальнейшей работе. В арифметическом блоке 50 определяется дальность R0 до РД
которая фиксируется блоком 43 регистрации.
Местоположение радиодатчика РД (человека, терпящего бедствия на воде) определяется по измеренным значениям α и R0.
Описанная выше работа бортового приемопеленгатора соответствует случаю приема полезного сигнала бедствия по основному каналу на частоте ωс (фиг.5).
Если ложный сигнал (помеха) принимается по зеркальному каналу на частоте ωЗ:
UЗ(t)=UЗcos(ωct+φc), 0≤t≤Tc,
то усилителями 34 и 62 первой промежуточной частоты выделяются следующие напряжения:


где 
ωпр1=ωГ1-ωр - промежуточная частота;
φпр7=φГ-φЗ1; φпр8=φГ-φЗ2,
K1, К2 - коэффициент передачи первого и второго приемных каналов соответственно;
φЗ1, φЗ2 - начальные фазы ложного сигнала (помехи), проходящего по первому и второму приемным каналам соответственно. На выходы усилителей 34 и 62 первой промежуточной частоты через регулируемые фазовращатели 70 и 71 соответственно с выхода калибратора 69 поступает калибровочный гармонический сигнал
uK(t)=UKcos(ωKt+φK).
С выхода усилителей 34 и 62 первой промежуточной частоты калибровочные сигналы выделяются узкополосными фильтрами 72 и 73 и после детектирования в амплитудных детекторах 74 и 75 поступают на вычитатель 76 системы амплитудной идентификации. При неравенстве модулей коэффициентов передачи приемных каналов (К1≠К2) на частоте ωк на выходе вычитателя 76 появляется напряжение (положительное или отрицательное), которое через фильтр 77 нижних частот и инверсный усилитель 78 воздействует на вторые (управляющие) входы усилителей 34 и 62 первой промежуточной частоты, изменяя их коэффициенты передачи таким образом, что напряжение на выходе вычитателя 76 стремится к нулю. При этом коэффициенты передачи усилителей 34 и 62 первой промежуточной частоты оказываются практически одинаковыми на частоте ωк калибровочного сигнала (К1=К2=К).
С выходов узкополосных фильтров 74 и 75 калибровочные сигналы поступают на систему фазовой идентификации, состоящую из фазового детектора 79, фильтра 80 нижних частот, инверсного усилителя 81 и двух регулируемых фазовращателей 70 и 71.
При наличии фазовой неидентичности приемных каналов на выходе фазового детектора 79 образуется напряжение (положительное или отрицательное), которое через фильтр 80 нижних частот и инверсный усилитель 81 воздействует на третьи (управляющие) входы регулируемых фазовращателей 70 и 71, изменяя фазовые сдвиги калибровочных сигналов таким образом, что выходное напряжение фазового детектора 79 стремится к нулю. Так достигается фазовая идентификация приемных каналов.
При малой величине Δω калибровочный сигнал несет информацию о неидентичности приемных каналов на первой промежуточной частоте ωпр1 в силу корреляции близких значений частотных характеристик.
Следовательно, на выходе усилителей 34 и 62 первой промежуточной частоты образуются следующие напряжения:


где Uпр=Uпр7=Uпр;
φпр7=φпр8=φпр.
Напряжение 

Напряжения 
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте ωЗ, полностью подавляется с помощью "внешнего кольца", состоящего из смесителей 29 и 61, усилителей 34 и 62 первой промежуточной частоты, фазовращателей 60 и 63 на 90°, гетеродина 28, сумматора 64 и реализующего фазокомпенсационный метод.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по первому комбинационному каналу на частоте ωк1.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте ωк2 (фиг.5)

то усилителями 34 и 62 первой промежуточной частоты выделяются напряжения:


где 
ωпр11=ωк2-2ωГ1 - первая промежуточная частота:
φпр10=φк2-φГ1.
Напряжение Uпр11(t) с выхода усилителя 62 первой промежуточной частоты поступает на вход фазовращателя на 90°, на выходе которого образуется напряжение

Напряжения Uпр10(t) и Uпр12(t) поступают на два входа сумматора 64, на выходе которого образуется суммарное напряжение:

где U∑2=2Uпр10.
Это напряжение подается на первый вход перемножителя 65, на второй вход которого поступает принимаемый сигнал uk2(t). На выходе перемножителя 65 образуется напряжение:
u9(t)=U9cos(2ωГ1t+φГ1), 0≤t≤Tr2,
где 
которое не попадает в полосу пропускания узкополосного фильтра 66. Ключ 68 не открывается и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте ωк2, подавляется. При этом используется "внутреннее кольцо", состоящее из перемножителя 65, узкополосного фильтра 66, амплитудного детектора 67, кольца 68, реализующего метод узкополосной фильтрации.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на первой промежуточной частоте

то с выхода приемной антенны он поступает на первый вход сумматора 53, выделяется узкополосным фильтром 51, настроенным на первую промежуточную частоту ωпр1, и инвертируется по фазе на 180° в фазоинверторе 52

Напряжения uпр(t) и 
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на частоте ωпр1, подавляется фильтром-пробкой, состоящим из узкополосного фильтра 51, фазоинвертора 52, сумматора 53, и реализует фазокомпенсационный метод.
Если два мощных ложных сигнала (помехи) на частотах ω1 и ω2 или несколько мощных сигналов (помех) появляются одновременно в полосе частот Δωп1 "слева" от полосы пропускания Δωп приемника, способные образовывать интермодуляционные помехи, то они поступают на первый вход сумматора 56, выделяются полосовым фильтром 54, инвертируются по фазе 180° фазоинвертором 55 и компенсируются в сумматоре 56 (фиг.6).
Следовательно, ложные сигналы (помехи), принимаемые в полосе частот Δωп1 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 54, фазоинвертора 55, сумматора 56 и реализующим фазокомпенсационный метод.
Если два мощных ложных сигнала (помехи) на частотах ω3 и ω4 или несколько мощных сигналов (помех) появляются одновременно в полосе частот Δωп2 "справа" от полосы пропускания Δωп приемника, способные образовать интермодуляционные помехи, то они поступают на первый вход сумматора 59, выделяются полосовым фильтром 57, инвертируются по фазе на 180° в фазоинтверторе 58 и компенсируются в сумматоре 59 (фиг.7).
Следовательно, ложные сигналы (помехи), принимаемые в полосе частот Δωп2 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 57, фазоинвертора 58, сумматора 59 и реализующим фазокомпенсационный метод.
Бортовая аппаратура, устанавливаемая на борту вертолета, инвариантна к нестабильности несущей частоты и виду модуляции принимаемых радиосигналов, так как пеленгация источника излучения сигнала бедствия осуществляется на стабильной частоте второго гетеродина 39.
Предлагаемая система обеспечивает полное подавление ложных сигналов (помех), принимаемых по зеркальному каналу на частоте ω3. Это достигается установлением неидентичности приемных каналов с помощью комплексной (амплитудной и фазовой) систем идентификации. Тем самым обеспечивается повышение помехоустойчивости и избирательности бортового приемопеленгатора.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениям аналогичного назначения обеспечивает повышение точности определения расстояния между вертолетом и человеком, терпящим бедствие на воде, а следовательно, и его местоположение. Это достигается за счет использования равносигнального направления приемных антенн, размещенных на двух противоположных концах лопастей несущего винта вертолета, относительно радиодатчика, размещенного на человеке, терпящего бедствие на воде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2011 |
|
RU2471244C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2003 |
|
RU2240950C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В НАПОРНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263887C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2010 |
|
RU2454818C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2243575C1 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
Изобретение относится к спасательным средствам. Система содержит спасательный жилет на человеке и аппаратуру, размещенную на борту вертолета. Спасательный жилет содержит источники света (1) и (2), источник (3) энергии, мембраны (8) и (9), рычаги (10), (11) с контактами (12), (13), воздушные полости (15), (16), передатчики (19), (20), передающие антенны (21), (22). Аппаратура, размещенная на борту вертолета, содержит приемные антенны (23), (24) и (25), смесители (26), (27), (29), (40), (61), гетеродины (26) и (39), усилители (30), (31), (34), (62) первой промежуточной частоты, перемножители (32), (33), (37), (65), узкополосные фильтры (35), (36), (44), (51), (66), (72), (73), линию задержки (38), усилитель (41) второй промежуточной частоты, амплитудные детекторы (42), (67), (74), (75), блок (43) регистрации, фазовые детекторы (45), (79), фазометры (46), (47), двигатель (48), опорный генератор (49), арифметический блок (50), фазоинверторы (52), (55), (58), сумматоры (53), (56), (59), (64), (81), фазовращатели (60), (63) на 90°, ключ (68), калибратор (69), регулируемые фазовращатели (70), (71), вычитатели (76), (82), фильтры (77), (80) нижних частот, блок (83) деления, пороговый блок (84), триггер (85), генератор (86) счетных импульсов, логический элемент И (87) и счетчик (88) импульсов. Повышается точность определения расстояния от вертолета до человека, терпящего бедствие на воде. 8 ил.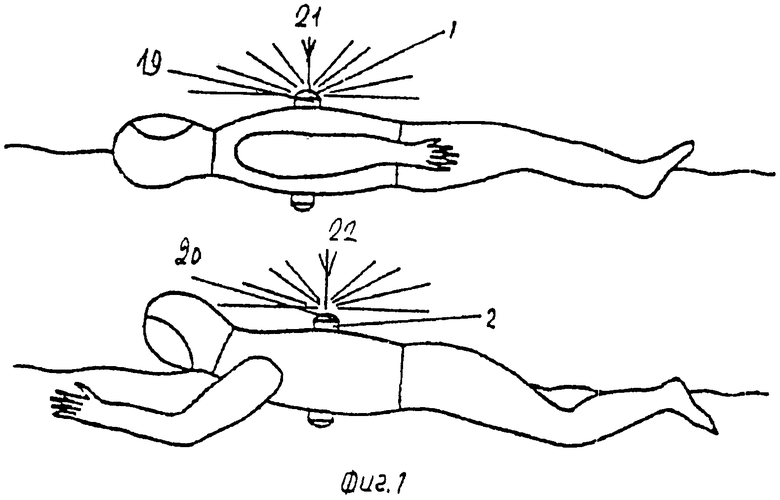
Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметические емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчики через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и двух пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, четвертого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом приемной антенны, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, первого регулируемого фазовращателя, второй вход которого соединен с выходом калибратора, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, второго амплитудного детектора, ключа, второй вход которого соединен с выходом четвертого сумматора, четвертого смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, первого амплитудного детектора и блока регистрации, из последовательно подключенных к второму выходу первого гетеродина первого фазовращателя на 90°, второго регулируемого фазовращателя, второй вход которого соединен с выходом калибратора, четвертого усилителя первой промежуточной частоты и второго фазовращателя на 90°, выход которого соединен с вторым входом четвертого сумматора, из последовательно подключенных к выходу первого усилителя первой промежуточной частоты шестого узкополосного фильтра, третьего амплитудного детектора, первого вычитателя, первого фильтра нижних частот и первого инверсного усилителя, два входа которого соединены с вторыми входами первого и четвертого усилителей первой промежуточной частоты соответственно, из последовательно подключенных к выходу четвертого усилителя первой промежуточной частоты седьмого узкополосного фильтра и четвертого амплитудного детектора, выход которого соединен с вторым входом первого вычитателя, из последовательно подключенных к выходу шестого узкополосного фильтра второго фазового детектора, второй вход которого соединен с выходом седьмого узкополосного фильтра, второго фильтра нижних частот и второго инверсного усилителя, два выхода которого соединены с третьими входами первого и второго регулируемых фазовращателей соответственно, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличающаяся тем, что она снабжена пятым сумматором, вторым вычитателем, блоком деления, пороговым блоком, триггером, генератором счетных импульсов, логическим элементом И, счетчиком импульсов и арифметическим блоком, причем к выходу первой приемной антенны первого пеленгационного канала последовательно подключены пятый сумматор, второй вход которого соединен с выходом второй приемной антенны второго пеленгационного канала, блок деления, второй вход которого через второй вычитатель соединен с выходом первой и второй приемных антенн первого и второго пеленгационных каналов, пороговый блок, триггер, логический элемент И, второй вход которого соединен с выходом генератора счетных импульсов, счетчик импульсов, вход сброса которого соединен с выходом порогового блока, и арифметический блок, выход которого соединен с вторым входом блока регистрации.
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| RU 2010137039 A, 10.03.2012 | |||
| RU 237224 C2, 10.11.2009 | |||
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2008 |
|
RU2363614C1 |
| Жидкостный ракетный двигатель с беспоршневым пневмонасосным агрегатом | 2016 |
|
RU2638705C1 |

