Предлагаемая система относится к спасательным средствам и может быть использована для обнаружения человека, терпящего бедствие на воде, и определения его персональных данных, местоположения и параметров движения.
Известны спасательные системы и устройства (авт. свид. СССР №№385.819, 431.063, 637.298, 765.113, 988.655, 1.348.819, 1.505.840, 1.505.841, 1.588.636, 1.615.054, 1.643.325, 1.664.653; патенты РФ №№2.000.995, 2.009.956, 2.038.259, 2.043.259, 2.051.838, 2.177.437, 2.296.479; патенты США №№3.621.501, 4.889.511; патент Великобритании № 1.145.951; патент Дании № 103.118 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является «Система для обнаружения и определения местоположения человека, терпящего бедствие на воде» (патент РФ №2.226.479, В 63 С 9/20, 2002), которая и выбрана в качестве прототипа.
Указанная система использует радиодатчик, которым снабжен человек, терпящий бедствие на воде, и вертолет, на борту которого установлена аппаратура для пеленгации радиодатчика и определения его местоположения.
Однако потенциальные возможности известной системы используются не в полной мере. Она не позволяет определять персональные данные человека, терпящего бедствие на воде, и параметры его движения. К персональным данным можно отнести следующие: страна, судно, фамилия, имя, отчество, год рождения и другие сведения. Движение человека, терпящего бедствие на воде, обусловлено течением, перемещением человека вплавь, водными и другими подручными средствами.
Технической задачей изобретения является расширение функциональных возможностей системы за счет определения персональных данных и параметров движения человека, потерпевшего бедствие на воде.
Поставленная задача решается тем, что система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчики через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и двух пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, четвертого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом приемной антенны, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, амплитудного детектора, ключа, второй вход которого соединен с выходом четвертого, сумматора четвертого смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, при этом к второму выходу первого гетеродина последовательно подключены первый фазовращатель на 90°, пятый смеситель, второй вход которого соединен с выходом третьего сумматора, четвертый усилитель первой промежуточной частоты и второй фазовращатель 90°, выход которого соединен с вторым входом четвертого сумматора, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосого фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены линия задержки, фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, к выходу третьего узкополосного фильтра последовательно подключены первый измеритель частоты, арифметический блок и блок регистрации, приемная антенна измерительного канала размещена над втулкой бинта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, снабжена пятым, шестым и седьмым перемножителями, шестым, седьмым и восьмым узкополосными фильтрами, фильтром нижних частот, шестым и седьмым смесителями, блоком эталонных частот, пятым усилителем первой промежуточной частоты, вторым и третьим измерителями частоты, причем к выходу усилителя второй промежуточной частоты последовательно подключены пятый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, шестой узкополосный фильтр, шестой перемножитель, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и фильтр нижних частот, выход которого соединен с вторым входом блока регистрации, к выходу приемной антенны измерительного канала последовательно подключены шестой смеситель, второй вход которого соединен с первым выходом блока эталонных частот, пятый усилитель первой промежуточной частоты, седьмой смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, седьмой узкополосный фильтр и второй измеритель частоты, выход которого соединен с третьим входом блока регистрации, к выходу усилителя первой промежуточной частоты, первого пеленгационного канала последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, восьмой узкополосный фильтр и третий измеритель частоты, выход которого соединен с четвертым входом блока регистрации, каждый передатчик, установленный в спасательном жилете, содержит последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом генератора модулирующего кода, и усилитель мощности.
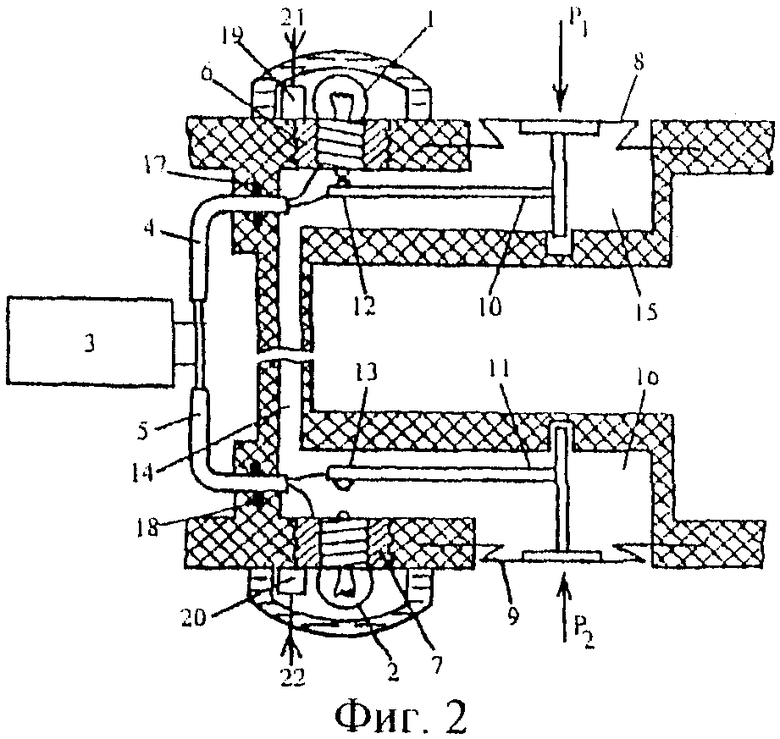
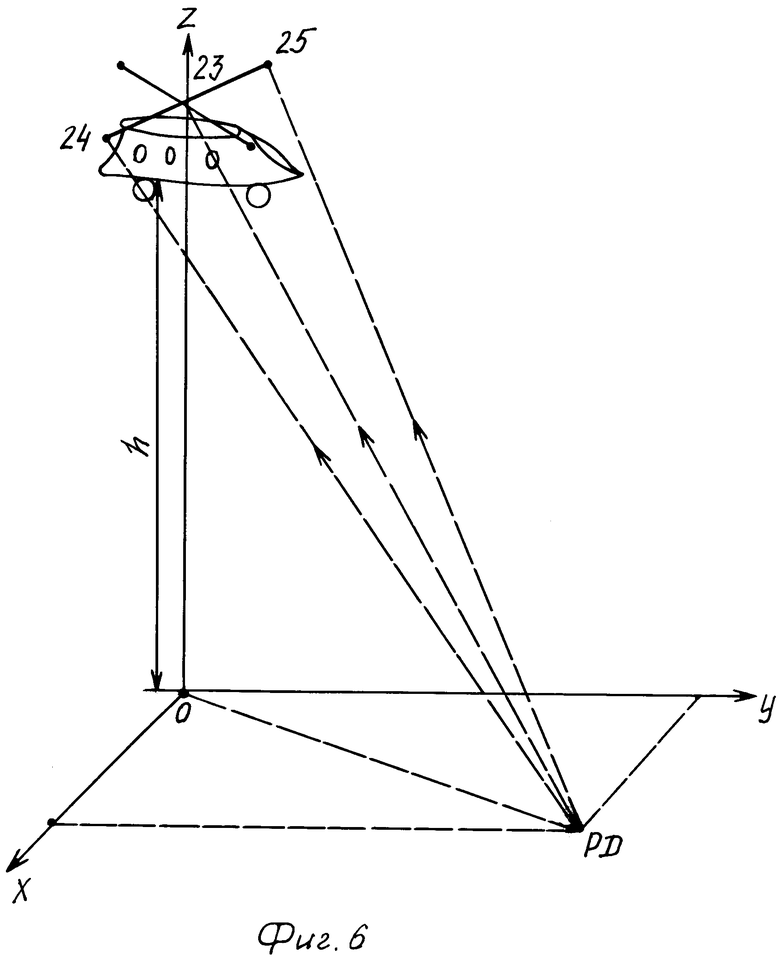
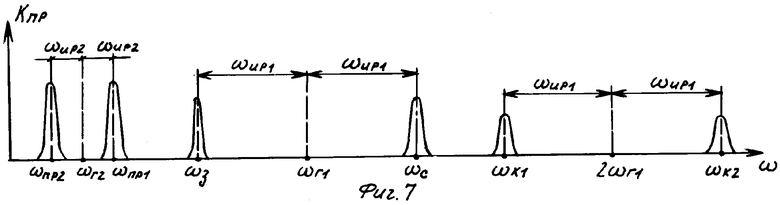
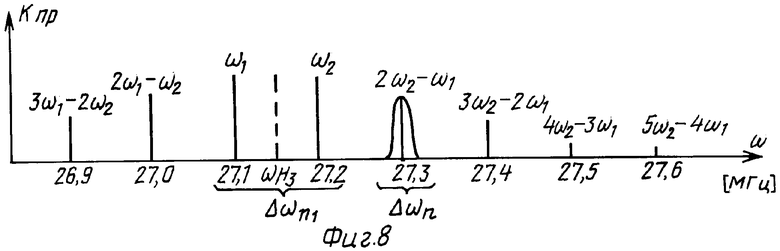
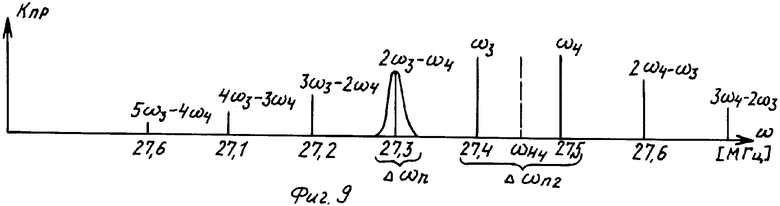
На фиг.1. схематично изображен спасательный жилет с источниками света 1, 2, передатчиками 19, 20 с передающими антеннами 21, 22, надетый на человека; на фиг.2. - то же, разрез. Структурная схема аппаратуры, установленной на борту вертолета, представлена на фиг.3. Структурная схема передатчика представлена на фиг.4. Временные диаграммы, поясняющие работу системы, изображены на фиг.5. Геометрическая схема расположения приемных антенн на вертолете изображена на фиг.6. Частотная диаграмма, поясняющая процесс образования дополнительных (зеркального и комбинационных) каналов приема, представлена на фиг.7. Примеры образования интермодуляционных помех показаны на фиг.8 и 9.
Спасательный жилет, кроме того, содержит источник 3 энергии, кабели 4 и 5 подвода энергии к источникам света 1, 2 и передатчикам 19, 20, патроны 6, 7, мембраны 8, 9 и связанные с ними рычаги 10, 11 с контактами 12, 13, а также герметичную пневмомагистраль 14, связывающую герметичные воздушные полости 15, 16. Места ввода кабелей 4 и 5 от источника энергии 3 в полости 15 и 16 загерметизированы уплотнительными кольцами 17 и 18. Источник света 1 и передатчик 19, источник света 2 и передатчик 20 подключены параллельно к источнику энергии 3.
Аппаратура, размещаемая на борте вертолета, содержит один измерительный и два пеленгационных канала.
Измерительный канал состоит из последовательно включенных приемной антенны 23, четвертого узкополосного фильтра 51, первого фазоинвертора 52, первого сумматора 53, второй вход которого соединен с выходом приемной антенны 23, первого полосового фильтра 54, второго фазоинвертора 55, второго сумматора 56, второй вход которого соединен с выходом сумматора 53, второго полосового фильтра 57, третьего фазоинвертора 58, третьего сумматора 59, второй вход соединен с выходом сумматора 56, первого смесителя 29, второй вход которого соединен с первым выходом первого гетеродина 28, первого усилителя 34 первой промежуточной частоты, четвертого сумматора 64, четвертого перемножителя 65, второй вход которого соединен с выходом сумматора 59, пятого узкополосного фильтра 66, амплитудного детектора 67, ключа 68, второй вход которого соединен с выходом сумматора 64, четвертого смесителя 40, второй вход которого соединен с выходом второго гетеродина 39, усилителя 41 второй промежуточной частоты, пятого перемножителя 70, второй вход которого соединен с выходом фильтра 42 нижних частот, шестого узкополосного фильтра 71, шестого перемножителя 72, второй вход которого соединен с выходом усилителя 41 второй промежуточной частоты, и фильтра 42 нижних частот, выход которого соединен со вторым входом блока 43 регистрации. К выходу приемной антенны 23 последовательно подключены шестой смеситель 74, второй вход которого соединен с первым выходом блока 73 эталонных частот, пятый усилитель 75 первой промежуточной частоты, седьмой смеситель 76, второй вход которого соединен с вторым выходом блока 73 эталонных частот, седьмой узкополосный фильтр 77 и второй измеритель 78 частоты, выход которого соединен с третьим входом блока 43 регистрации. К выходу усилителя 30 первой промежуточной частоты последовательно подключены седьмой перемножитель 79, второй вход которого соединен с выходом усилителя 34 первой промежуточной частоты, восьмой узкополосный фильтр 80 и третий измеритель 81 частоты, выход которого соединен с четвертым входом блока 43 регистрации.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 24 (25), смесителя 26 (27), второй вход которого соединен с первым выходом первого гетеродина 28, усилителя 30 (31) первой промежуточной частоты, перемножитель 32 (33), второй вход которого соединен с выходом усилителя 41 второй промежуточной частоты, и узкополосного фильтра 35 (36). К выходу первого узкополосного фильтра 35 последовательно подключены третий перемножитель 37, второй вход которого соединен с выходом второго узкополосного фильтра 36, третий узкополосный фильтр 44 и первый фазометр 46, второй вход которого соединен с выходом опорного генератора 49. К выходу второго узкополосного фильтра 36 последовательно подключены линия 38 задержки, фазовый детектор 45, второй вход которого соединен с выходом узкополосного фильтра 36, и второй фазометр 47, второй вход которого соединен с выходом опорного генератора 49. К выходу узкополосного фильтра 44 последовательно подключены первый измеритель 50 частоты и арифметический блок 69 и блок 43 регистрации.
Приемная антенна 23 измерительного канала размещена над втулкой винта вертолета, приемные антенны 24 и 25 пеленгационных каналов размещены на концах лопастей несущего винта вертолета. Двигатель 48 кинематически связан с винтом вертолета и опорным генератором 49.
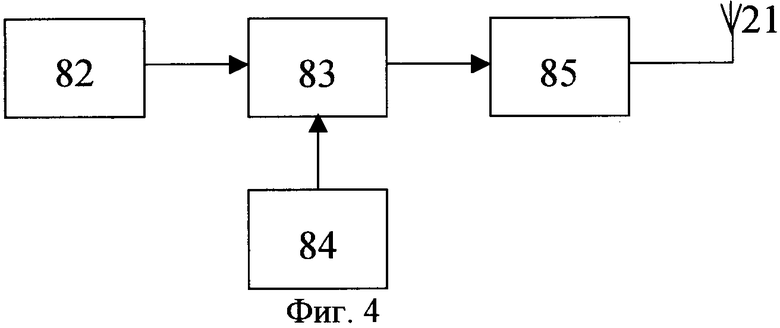
Каждый передатчик 19 (20), установленный в спасательном жилете, содержит последовательно включенные задающий генератор 82, фазовый манипулятор 83, второй вход которого соединен с выходом генератора 84 модулирующего кода и усилителя 85 мощности.
Система работает следующим образом.
В положении, показанном на фиг.2, давление окружающей среды Р2 на мембране 9 больше, чем атмосферное давление P1 на мембрану 8. Мембрана 9 находится в поджатом, а мембрана 8 в отжатом состоянии. Соответственно рычаг 11 отжимает контакт 13 от источника 2 света и передатчика 20, а рычаг 10 поджимает контакт 12 к источнику 1 света и передатчику 19. Источник 1 света горит, передатчик 19 излучает сигнал бедствия, источник 2 света не горит, передатчик 20 не работает.
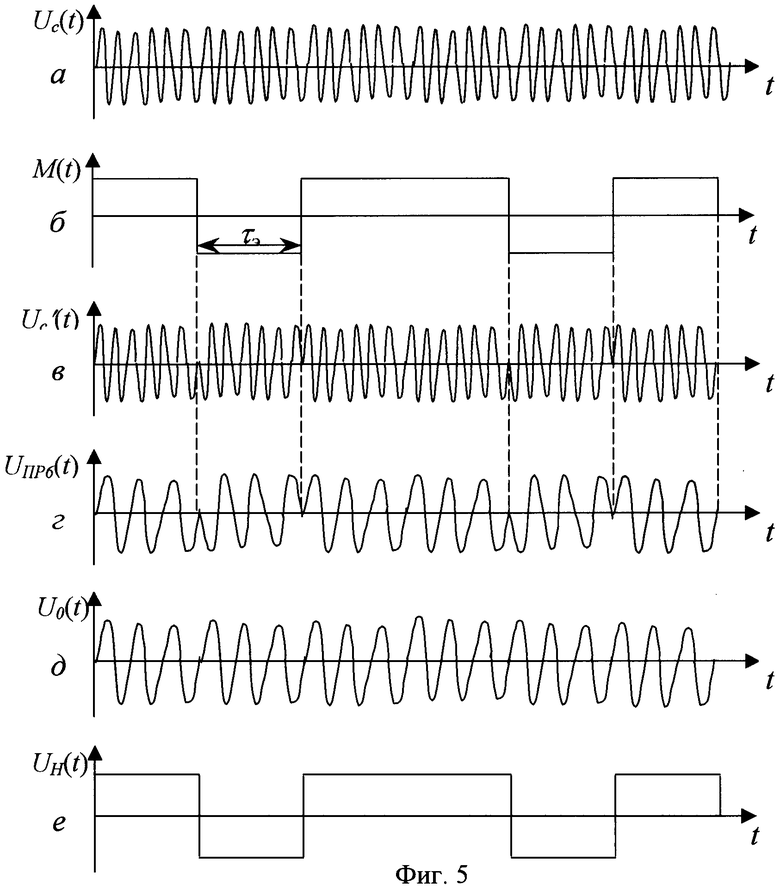
В этом случае задающий генератор 82 формирует гармоническое колебание (фиг.5, а)

где Uc, ωc, ϕc, Тc - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания, которое поступает на первый вход фазового манипулятора 83. На второй вход фазового манипулятора 83 подается модулирующий код M(t) (фиг.5, б), который содержит следующие персональные данные человека, терпящего бедствие на воде: страна, судно, фамилия, имя, отчество, год рождения и другие сведения. На выходе фазового манипулятора 83 формируется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в)

где ϕк(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (К=1, 2,..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Тc=N·τэ), который после усиления в усилителе 85 мощности излучается передающей антенной 21 в эфир в качестве сигнала бедствия.
Если человек совершает поворот относительно горизонтальной оси на 180°, то тогда наверху оказывается источник 2 света и передатчик 20 с передающей антенной 22. Давление окружающей среды на мембрану 8 становится больше, чем на мембрану 9, мембрана 8 поджимает рычаг 10, размыкает контакт 12 с источником 1 света и передатчиком 19. Цепь разомкнута, источник 1 света гаснет, передатчик 19 выключается. Одновременно воздух из полости 15 перетекает через магистраль 14 в полость 16, мембрана 9 отжимается, рычаг 11 замыкает контакт 13 с источником 2 света и передатчиком 20. Источник 2 света загорается, а передатчик 20 излучает сигнал бедствия.
В ночное время и в хорошую погоду источник света может быть обнаружен визуально на значительном расстоянии. Однако в светлое время и в плохую погоду обнаружить источник света затруднительно.
Радиоизлучение является всепогодным и обеспечивает передачу сигнала бедствия на большие расстояния. При этом сигнал бедствия (SOS) излучается периодически с определенным периодом Tn и длительностью Tc на определенной частоте ωc, которая отводится специально для передачи сигнала бедствия и не занимается для передачи другой информации.
Приемная аппаратура размешивается на борту вертолета. Наличие вращающего винта вертолета может быть использовано для определения направления на источник излучения сигнала бедствия (радиодатчик РД) с помощью устройства, антенны которого расположены на концах лопастей несущего винта.
Принимаемые ФМн-сигналы бедствия:

где ±Δω - нестабильность несущей частоты сигнала, обусловленная различными дестабилизирующими факторами;
R - радиус окружности, на котором размещены приемные антенны 24 и 25;
Ω=2πR - скорость вращения приемных антенн 24 и 25 вокруг приемной антенны 23 (скорость вращения винта вертолета);
α - пеленг (азимут) на источник излучения сигнала бедствия;
с выходов приемных антенн 23-25 поступающий на первые входы смесителей 29, 61, 26 и 27, на вторые входы которых подается напряжение гетеродина 28:
Причем на первые входы смесителей 29 и 61 принимаемой сигнал поступает через сумматоры 53, 56 и 59, у которых работает только одно плечо. На выходе смесителей образуются напряжения комбинационных частот. Усилителями 34, 62, 30 и 31 выделяются напряжения первой промежуточной частоты:
где  ;
;
K1 - коэффициент передачи смесителей;
ωПР1=ωс-ωГ1 - первая промежуточная частота;
ϕПР1=ϕс-ϕГ1.
Напряжение UПР2(t) с выхода усилителя 62 первой промежуточной частоты поступает на вход фазовращателя 63 на 90°, на выходе которого образуется напряжение

Напряжения UПР1(t) и UПР5(t) поступают на два входа сумматора 64, на выходе которого образуется суммарное напряжение

где UΣ1=2VПР1.
Это напряжение подается на первый вход перемножителя 65, на второй вход которого поступает принимаемый сигнал U1(t) с выхода сумматора 59. На выходе перемножителя 65 образуется гармоническое напряжение:

где 
К2 - коэффициент передачи перемножителя.
Частота настройки ωH1 узкополосного фильтра 51 выбрана равной первой промежуточной частоте ωПР1
ωН1=ωПР1
Частота настройки ωН2 узкополосного фильтра 66 выбрана равной частоте первого гетеродина 28 (фиг.7)
ωН2=ωГ1.
Частота настройки ωН3 и полоса пропускания ΔωП1 полосового фильтра 54 выбраны равными (фиг.8)
 ΔωП1=ω2-ω1,
ΔωП1=ω2-ω1,
где ω1, ω2 - частоты двух возможных мощных сигналов, появление которых в полосе частот ΔωП1, расположенной «слева» от полосы пропускания ΔωП приемника, приведет к образованию интермодуляционных помех.
Частота настройки ωН4 и полоса пропускания ΔωП2 полосового фильтра 57 выбраны равными (фиг.9.):
 ΔωП2=ω4-ω3,
ΔωП2=ω4-ω3,
где ω3, ω4 - частоты двух возможных мощных сигналов, появление которых в полосе частот ΔωП2, расположенной «справа» от полосы пропускания ΔωП приемника, приведет к образованию интермодуляционных помех.
Так как частота настройки ωН2 узкополосного фильтра 66 выбрана равной частоте ωГ1 первого гетеродина 28 (ωН2=ωГ1), то напряжение U4(t) выделяется узкополосным фильтром 66, детектируется амплитудным детектором 67 и поступает на управляющий вход ключа 68, открывая его. Ключ 68 в исходном состоянии всегда закрыт. При этом суммарное напряжение UΣ1(t) через открытый ключ 68 с выхода сумматора 64 поступает на первый вход смесителя 40, на второй вход которого подается напряжение второго гетеродина 39

На выходе смесителя 40 образуется напряжение комбинационных частот.
Усилителем 41 выделяется напряжение второй промежуточной частоты (фиг.5, г)

где 
ωПР2=ωПР1-ωГ2 - вторая промежуточная частота;
ϕПР6=ϕПР1-ϕГ2
которое поступает на первые входы перемножителей 70 и 72. На второй вход перемножителя 72 подается опорное напряжение с выхода узкополосного фильтра 71 (фиг.5, д)

На выходе перемножителя 72 образуется напряжение

где 
Фильтром 42 нижних частот выделяется низкочастотное напряжение (фиг.5, е)

которое является аналогом модулирующего кода M(t), фиксируется блоком 43 регистрации и подается на второй вход перемножителя 70. На входе перемножителя 70 образуется напряжение
 где
где 

которое выделяется узкополосным фильтром 71 и поступает на второй вход перемножителя 72.
Перемножители 70, 72, узкополосный фильтр 71 и фильтр 42 нижних частот образуют демодулятор ФМн-сигналов, который выделяет опорное напряжение, необходимое для синхронного детектирования принимаемого ФМн-сигнала, непосредственно из самого принимаемого ФМн-сигнала. Причем он свободен от явления «обратной работы», присущего известным устройствам формирования опорного напряжения непосредственно из самого принимаемого ФМн-сигнала (схема Пистолькорса А.А., Костоса Д.Ф., Сифорова В.И., Травина Г.А. и другие).
Напряжение UПР6(t) с выхода усилителя 41 второй промежуточной частоты одновременно подается на вторые входы перемножителей 32 и 33, на первые входы которых поступают напряжения UПР3(t) и UПР4(t) с выходов усилителей 30 и 31 первой промежуточной частоты соответственно. На выходе перемножителей 32 и 33 образуются фазомодулированные (ФМ) напряжения:

где 
которые выделяются узкополосными фильтрами 35 и 36 с частотой настройки ωН5=ωГ2.
Знаки «+» и «-» перед величиной 2π(R/λ)·Cos( Ω-α) соответствуют диаметрально противоположным расположением антенн 24 и 25 на концах лопастей несущего винта вертолета относительно приемной антенны 23, размещенной над втулкой винта вертолета.
Следовательно, полезная информация о пеленге α переносится на стабильную частоту ωГ2 второго гетеродина 39. Поэтому нестабильность ±Δω несущей частоты принимаемых ФМн-сигналов бедствия, вызванная различными дестабилизирующими факторами, на влияет на результат пеленгации, там самым повышает точность определения местоположения источника радиоизлучений.
Причем величина
Δϕm=2π(R/λ),
входящая в состав указанных колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 24 и 25 относительно фазы сигнала, принимаемого неподвижной антенной 23. Пеленгатор тем чувствительнее к изменению угла α, чем больше относительный размер измерительной базы R/λ. Однако с ростом R/λ уменьшается значение угловой координаты α, при которой разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета угла α.
Следовательно, при  наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, т.к. при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ часто не удается из-за конструктивных соображений.
наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, т.к. при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации радиодатчика РД в горизонтальной (азимутальной) плоскости приемные антенны 24 и 25 располагаются на концах лопастей несущего винта вертолета. Смешение сигналов от двух диаметрально противоположенных приемных антенн 24 и 25, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, которая идентична фазовой модуляции, получаемой с помощью одной приемной антенны, вращающейся по кругу, радиус R1 которого в два раза больше (R1=2R).
Действительно на выходе перемножителя 37 образуются гармоническое напряжения
 0≤t≤Tс,
0≤t≤Tс,
где 
с индексом фазовой модуляции

которое выделяется узкополосным фильтром 44 и поступает на первый вход фазометра 46, на второй вход которого подается напряжение опорного генератора 50

Фазометр 46 обеспечивает точное, но неоднозначное измерение угловой координаты α.
Для устранения возникающей при этом неоднозначности отсчета угла α необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ. Это достигается использованием автокоррелятора, состоящего из линии 38 задержки и фазового детектора 45, что эквивалентно уменьшению индекса фазовой модуляции до величины
где d1=2R.
На выходе автокоррелятора образуется напряжение

с индексом фазовой модуляции Δϕm2 которое поступает на первый вход фазометра 47, на второй вход которого подается напряжение Uon(t) опорного генератора 50. Фазометр 47 обеспечивает грубое, но однозначное измерение угла α.
Значение доплеровского сдвига частоты позволяет определить радиальную скорость и местоположение радиодатчика РД.
Минимальное расстояние R0 от радиодатчика РД до винта вертолета можно определить из выражения
где Fg(t) - доплеровский сдвиг частоты,
V= ΩR,
λ - длина волны.
Доплеровский сдвиг частоты измеряется с помощью измерителя 50 частоты, а искомая дальность R0 определяется в арифметическом блоке 69 и фиксируется в блоке 43 регистрации.
Местоположение радиодатчика РД (человека, терпящего бедствие на воде) определяется по измеренным значениям α и R0.
Для измерения радиальной скорости взаимного перемещения человека, терпящего бедствие на воде, и вертолета используется эффект Доплера. Сущность его заключается в том, что частота fc принимаемых колебаний отличается от частоты f0 излучаемых колебаний, если излучатель и приемник перемещаются друг относительно друга. С этой целью принимаемый ФМн-сигнал U1(t) с выхода приемной антенны 23 поступает на первый вход смесителя 74, на второй вход которого подается напряжение первой эталонной частотой f1 с первого выхода блока 73 эталонных частот. На выходе смесителя 74 образуются напряжения комбинационных частот. Усилителем 75 выделяется напряжение первой промежуточной частоты

где Fg - доплеровский сдвиг частоты, обусловленный взаимным перемещением источника излучения и приемника, которое поступает на первый вход смесителя 76.
На второй вход смесителя 76 подается опорный сигнал, частота которого определяется выражением
где F0 - частота подставки, которая вводится для определения знака доплеровского смещения Fg.
На выходе смесителя 76 формируются колебания следующей частоты

которые выделяются узкополосным фильтром 77. Их частота измеряется измерителем 78 частоты и фиксируется блоком 43 регистрации. По величине и знаку доплеровского смещения оценивают величину и направление радиальной скорости источника излучения сигнала. В зависимости от того, fn>F0 или fn<F0, определяют знак доплеровского смещения, а следовательно, и направление радиальной скорости.
Для измерения уголовной скорости излучателя по азимуту °α напряжения UПР1(t) и UПР3(t) с выходов усилителей 34 и 30 первой частоты поступает на два входа перемножителя 79. При этом узкополосный фильтр 80 выделяет гармоническое колебание на частоте, равной разности доплеровских частот в азимутальной плоскости

Для измерения угловой скорости источника излучения сигнала, кроме разности доплеровских частот, необходимо измерять и направляющий косинуса в азимутальной плоскости:
Указанная разность доплеровских частот измеряется измерителем 81 частоты и фиксируется блоком 43 регистрации.
В блоке 43 регистрации можно определить тангенциальную составляющую вектора скорости

и модуль вектора скорости излучателя
который находится как результат измерения четырех радионавигационных параметров: двух координат α, R0 и двух скоростей 
Описанная выше работа бортового приемопеленгатора соответствует случаю приема полезного сигнала бедствия по основному каналу на частоте ωc (фиг.7.).
Если ложный сигнал (помеха) принимается по зеркальному каналу на частоте ωз

то усилителями 34 и 62 первой промежуточный частоты выделяются следующие напряжения:

где 
Напряжение UUP8(t) с выхода усилителя 62 первой промежуточной частоты поступает на вход фазовращателя 63 на 90°, на выходе которого образуется напряжение

Напряжения UПР7(t) UПР9(t), поступающие на два входа сумматора 64, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте ωз, подавляется с помощью «внешнего кольца», состоящего из смесителей 29 и 61, усилителей 34 и 62 первой промежуточной частоты, фазовращателей 60 и 63 на 90°, гетеродина 28 и сумматора 64 и реализующего фазокомпенсационный метод.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по первому комбинационному каналу на частоте ωк1.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте ωк2

то усилителями 34 и 62 первой промежуточной частоты выделяются напряжения:

где 
 - промежуточная частота:
- промежуточная частота:

Напряжение UПР11(t) и с выхода усилителя 62 первой промежуточной частоты поступает на вход фазовращателя 63 на 90°, на выходе которого образуется напряжение

Напряжение UПР10(t) и UПР12(t) поступают на два входа сумматора 64, на выходе которого образуется суммарное напряжение

где 
Это напряжение подается на первый вход перемножителя 65, на второй вход которого поступает принимаемый сигнал Uк2(t). На выходе перемножителя 65 образуется напряжение

где 
которое не попадает в полосу пропускания узкополосного фильтра 66. Ключ 68 не открывается и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте ωк2, подавляется. При этом используется «внутреннее кольцо», состоящее из перемножителя 65, узкополосного фильтра 66, амплитудного детектора 67 и ключа 68 и реализующее метод узкополосной фильтрации.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на первой промежуточной частоте

то с выхода приемной антенны 23 он поступает на первый вход сумматора 53, выделяется узкополосным фильтром 51, настроенным на первую промежуточную частоту ωПР1, и инвертируется по фазе на 180° в фазоинверторе 52

Напряжения UПР(t) и U'ПР(t), поступающие на два входа сумматора 53, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на частоте ωПР1, подавляется фильтром-пробкой, состоящим из узкополосного фильтра 51, фазоинвертора 52 и сумматора 53 и реализующим фазокомпенсационный метод.
Если два мощных сигнала (помехи) на частотах ω1 и ω2 или несколько мощных сигналов (помех) появляются одновременно в полосе частот ΔωП1 «слева» от полосы пропускания ΔωП приемника, способные образовать интермодуляционные помехи, то они поступают на первый вход сумматора 56, выделяются полосовым фильтром 54, инвертируются по фазе на 180° фазо-инвертором 55 и компенсируются в сумматоре 56 (фиг.8.).
Следовательно, ложные сигналы (помехи) принимаемые в полосе частот ΔωП1 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 54, фазоинвертора 55 и сумматора 56 и реализующим фазокомпенсационный метод.
Если два мощных ложных сигнала (помехи) на частотах ω3 и ω4 или несколько мощных сигналов (помех) появляются одновременно в полосе частот ΔωП2 «справа» от полосы пропускания ΔωП приемника, способные образовать интермодуляционные помехи, то они поступают на первый вход сумматора 59, выделяются полосовым фильтром 57, инвертируются по фазе на 180° в фазоинверторе 58 и компенсируются в сумматоре 59 (фиг.9.).
Следовательно, ложные сигналы (помехи), принимаемые в полосе частот ΔωП2 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 57, фазоинвертора 58 и сумматора 59 и реализующим фазокомпенсационный метод.
Бортовая аппаратура, устанавливаемая на борту вертолета, инвариантна к виду модуляции и нестабильности несущей частоты ±Δω принимаемых радиосигналов, т.к. пеленгация источника излучения сигнала бедствия осуществляется на стабильной частоте ωГ2 второго гетеродина 39.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает не только обнаружение и определение местоположение человека, терпящего бедствие на воде, но и определение его персональных данных и параметров движения.
Для определения персональных данных, содержащихся в модулирующем коде, используется универсальный демодулятор ФМн-сигналов, свободный от явления «обратной работы».
Тем самым функциональные возможности системы расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2003 |
|
RU2240950C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2005 |
|
RU2299832C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2007 |
|
RU2381138C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2007 |
|
RU2372245C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2448017C1 |
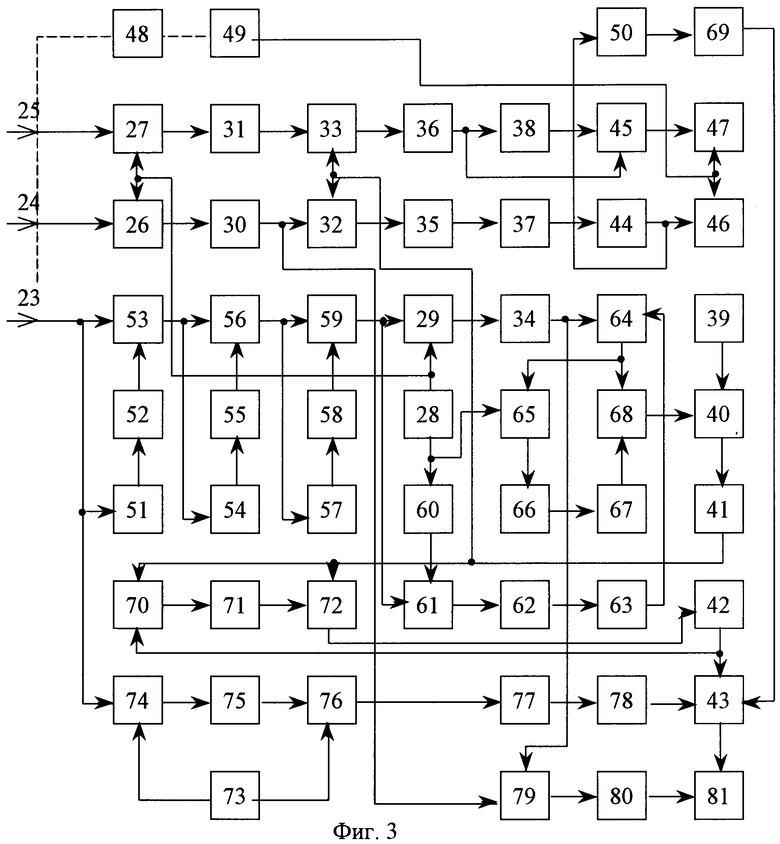
Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, содержит спасательный жилет с источниками света и передатчиками с передающими антеннами, надетый на человека, и аппаратуру, размещенную на вертолете. Каждый передатчик содержит задающий генератор, фазовый манипулятор, генератор модулирующего кода и усилитель мощности. Размещенная на борту вертолета аппаратура содержит приемную антенну 23, установленную над втулкой несущего винта вертолета, и приемные антенны 24, 25, установленные на концах лопастей этого винта, а также смесители 26, 27, 29, 40, 61, 74 и 76, гетеродины 28, 39, усилители 30, 31, 34, 62, 75 первой промежуточной частоты, перемножители 32, 33, 37, 65, 70, 72, 79, узкополосные фильтры 46, 47, опорный генератор 49, кинематически связанный с двигателем 48 вертолета, измерители 50, 78, 81 частоты, арифметический блок 69, полосовые фильтры 54, 57, фазоинверторы 52, 55, 58, сумматоры 53, 56, 59, 64, ключ 68, фазовращатели 60, 63 на 90°, блок 43 регистрации, блок 73 эталонных частот. Такое выполнение системы обеспечивает расширение ее функциональных возможностей за счет определения персональных данных и параметров движения человека, потерпевшего бедствие на воде. 9 ил.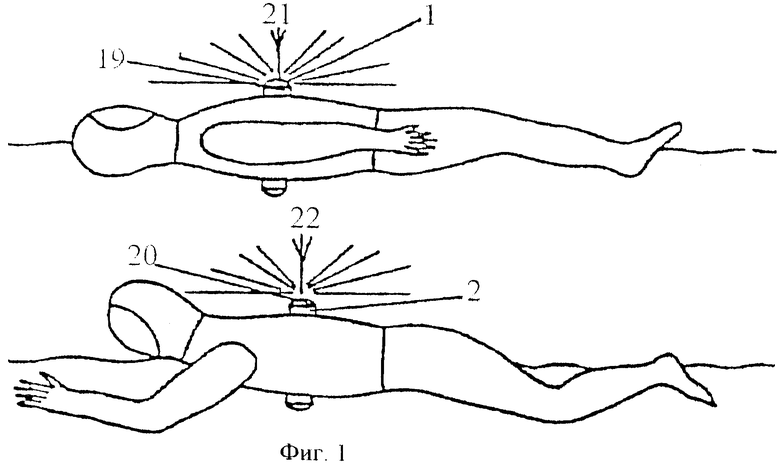
Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчики через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и двух пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, четвертого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом приемной антенны, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, амплитудного детектора, ключа, второй вход которого соединен с выходом четвертого сумматора, четвертого смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, при этом к второму выходу первого гетеродина последовательно подключены первый фазовращатель на 90°, пятый смеситель, второй вход которого соединен с выходом третьего сумматора, четвертый усилитель первой промежуточной частоты и второй фазовращатель на 90°, выход которого соединен с вторым входом четвертого сумматора, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с усилителем второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены линия задержки, фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, к выходу третьего узкополосного фильтра последовательно подключены первый измеритель частоты, арифметический блок и блок регистрации, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличающаяся тем, что она снабжена пятым, шестым и седьмым перемножителями, шестым, седьмым и восьмым узкополосными фильтрами, фильтром нижних частот, шестым и седьмым смесителями, блоком эталонных частот, пятым усилителем первой промежуточной частоты, вторым и третьим измерителями частоты, причем к выходу усилителя второй промежуточной частоты последовательно подключены пятый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, шестой узкополосный фильтр, шестой перемножитель, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и фильтр нижних частот, выход которого соединен с вторым входом блока регистрации, к выходу приемной антенны измерительного канала последовательно подключены шестой смеситель, второй вход которого соединен с первым выходом блока эталонных частот, пятый усилитель первой промежуточной частоты, седьмой смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, седьмой узкополосный фильтр и второй измеритель частоты, выход которого соединен с третьим входом блока регистрации, к входу усилителя первой промежуточной частоты первого пеленгационного канала последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, восьмой узкополосный фильтр и третий измеритель частоты, выход которого соединен с четвертым входом блока регистрации, каждый передатчик, установленный в спасательном жилете, содержит последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом генератора модулирующего кода, и усилитель мощности.
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| Спасательный жилет | 1989 |
|
SU1664653A1 |
| DE 4311473 А1, 13.10.1994. | |||

