Изобретение относится к электронным банковским автоматам. Более конкретно, настоящее изобретение относится к электронному банковскому автомату, который обеспечивает возможность того, что переводные векселя, ценные бумаги или другие документы, помещенные пользователем, идентифицируемые и сохраняемые в автомате, позже избирательным образом выдаются другому пользователю.
Электронные банковские автоматы известны из предшествующего уровня техники. Электронные банковские автоматы используются для осуществления транзакций с ценностями. Широко известным типом электронных банковских автоматов является автоматическая кассовая машина (банкомат). Другие типы электронных банковских автоматов используются для счета и выдачи наличных. Эти автоматы часто используются кассирами или представителями подразделений обслуживания клиентов в банковских и иных учреждениях, связанных с осуществлением транзакций.
Некоторые типы электронных банковских автоматов используются для осуществления или получения платежей, для выдачи или приема билетов, дорожных чеков, ценных бумаг, купонов, расписок пари, ваучеров и других предметов, характеризуемых стоимостью. Некоторые электронные банковские автоматы принимают депозиты в форме конвертов, чеков, наличных или иных предметов. Другие электронные банковские автоматы могут использоваться для предоставления кредита, осуществления платежей по счетам или помещения вкладов на различные счета. Для целей настоящего раскрытия электронный банковский автомат будет рассматриваться как автомат любого типа, который обеспечивает выполнение транзакций со стоимостью.
Широко используемые банкоматы принимают депозиты от пользователей и обрабатывают депозиты с использованием устройств, которые отделены от устройств, выдающих валюту и иные предметы пользователям. Наиболее часто депозитарии банкомата требуют, чтобы пользователи помещали свои депозиты в конверт. Конверт принимается в автомат на хранение. Хотя пользователь указывает стоимость содержимого конверта, счет пользователя часто не кредитуется на величину депозита до тех пор, пока конверт не будет удален из банкомата банковскими служащими и его содержимое не будет проверено.
Другие банкоматы имеют возможность приема чеков и других обращающихся финансовых инструментов. Такие автоматы могут содержать устройства, такие как описано в патенте США 5422467. Устройства этого типа могут быть использованы для аннулирования и формирования электронных изображений чеков, которые помещены в банкомат. Аннулированные чеки хранятся в автомате для последующего их изъятия персоналом банка.
Денежные банкноты, дорожные чеки и иные документы и материалы в виде листов, обычно выдаваемые банкоматами, обычно размещаются в автомате в съемных контейнерах. Листы выдаются из контейнеров и доставляются автоматом к пользователям. Периодически эти контейнеры должны извлекаться из автомата для пополнения запаса листов. Эти действия требуют больших затрат труда. Для замены контейнера необходимо открыть надежно защищенную часть банкомата. Контейнеры необходимо извлечь из автомата и установить в автомат новые контейнеры, содержащие новый запас листов. Как вариант, контейнеры в автомате могут быть открыты для пополнения их денежными банкнотами или иными листами финансовых документов и затем установлены на свое место. После повторной установки контейнеров необходимо запереть надежно защищенную часть автомата.
Выемка или пополнение контейнеров часто требует транспортировки заполненных контейнеров к автомату и возврата частично опустошенных контейнеров в удаленное местоположение. Хотя прилагаются усилия для проектирования контейнеров с учетом минимизации возможностей краж, однако риск все равно сохраняется. Поэтому такие операции обычно выполняются вооруженными курьерами, причем всякий раз, когда имеет место доступ к наличным или иным ценностям, в операции участвует несколько лиц. Поскольку большое количество людей могут участвовать в операциях по погрузке контейнеров, транспортировке контейнеров для замены к банкоматам, замене контейнеров, возврату изъятых контейнеров и проверке содержимого возвращенных контейнеров, то часто трудно идентифицировать причины случающихся потерь.
Необходимость периодической замены контейнеров с валютой вызывает неудобства в обслуживании, поскольку банкомат должен быть отключен. Пользователи не имеют возможности пользоваться банкоматом при пополнении его денежными средствами, причиной чего могут быть потерянные возможности совершения транзакций и, следовательно, неудовлетворенность пользователей. Неудовольствие пользователей также может быть вызвано тем, что операции по пополнению запаса денежных средств не выполняются с достаточной частотой, чтобы автомат мог обеспечивать выдачу валюты и иных документов.
Другие типы электронных банковских автоматов, например, выдающие наличные персоналу по обслуживанию клиентов, имеют те же недостатки, что и банкоматы. Периодическое пополнение запаса валюты или иных ценных документов, выдаваемых автоматом, должно производиться для того, чтобы поддерживать функционирование автомата. В то время как такие автоматы повышают быстродействие услуг по выдаче наличных клиентам, имеются значительные потери, связанные с разделением, подготовкой и транспортировкой валюты, прежде чем она будет помещена в автомат.
Разработаны банковские автоматы для идентификации и счета денежных средств. Такие автоматы могут использоваться в банковских учреждениях и в торговле через автоматы. Автоматы, которые считают валюту, в общем случае требуют, чтобы купюры были предварительно ориентированы конкретным образом для обеспечения надлежащей идентификации. Эта операция связана со значительными затратами времени для обслуживающего персонала. Многие автоматы по счету валюты также имеют тенденцию отбраковывать действительные банкноты вследствие их естественного износа, что имеет место, например, для американской валюты. Быстродействие таких автоматов по счету и приемке банкнот также оставляет желать лучшего во многих случаях.
Электронные банковские автоматы, обеспечивающие прием валюты, идентификацию конкретного типа и номинала валюты, сохранение валюты и последующую выдачу ее пользователю, используются и в других странах помимо США. Такие автоматы рециклирования используются в Японии, где денежные банкноты имеют специальные символы, облегчающие их идентификацию машинами. Однако такие автоматы рециклирования в общем случае не пригодны для использования с денежными банкнотами США, которые в общем случае не имеют специальных признаков для облегчения их идентификации автоматом. Денежные банкноты США также подвержены воздействию целого спектра факторов, таких как износ, загрязнение, обесцвечивание, что не приводит к непригодности банкноты для использования, но сильно затрудняет ее надежную идентификацию автоматом.
Банковские автоматы для рециклирования валюты, которые были разработаны ранее, в общем случае характеризуются низкими скоростями работы, особенно когда такие автоматы используются для обработки большого количества банкнот. Часто такие автоматы требуют, чтобы банкноты были ориентированы конкретным образом, и значительные затраты времени обусловлены отбраковкой банкнот, ориентированных ненадлежащим образом. Манипулирование листами документов в целях облегчения идентификации и хранения также представляет собой процесс, требующий больших затрат времени. После того как лист был первоначально идентифицирован надлежащим образом и оставлен на хранение в автомате, обычно не проводится проверка для того, чтобы удостовериться, что первоначальное определение типа и характера банкноты было корректным. В результате пользователь может получить неправильно идентифицированную банкноту. Это также может привести к снижению удовлетворенности пользователей.
Таким образом, имеется потребность в электронном банковском автомате для рециклирования валюты, который обладает более высокой надежностью, работает с большей скоростью и который может быть использован с валютой США и другими валютами, а также с другими документами, которые имеют широкий спектр свойств.
Задачей изобретения является создание электронного банковского автомата для рециклирования валюты.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который обладает более высокой надежностью и работает с большей скоростью.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который работает с банкнотами и другими документами, которые характеризуются широком разнообразием свойств.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который способен разбирать и разделять документы, введенные стопкой.
Также задачей изобретения является создание электронного банковского автомата, который ориентирует документы относительно канала транспортировки листов при перемещении таких документов с высокой скоростью.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который может транспортировать множество документов по каналу транспортировки листов одновременно и с высокой скоростью.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который идентифицирует документы и который возвращает неидентифицированные документы пользователю.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который позволяет поместить документы в банковский автомат и после идентификации документов осуществить выбор, следует ли осуществить депозит документов или вернуть их.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который может идентифицировать помещаемые документы независимо от их ориентации.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который обеспечивает селективное хранение помещенных документов в зонах хранения в автомате.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который обеспечивает селективное хранение помещенных документов в съемных контейнерах.
Также задачей изобретения является создание электронного банковского автомата для рециклирования валюты, который обеспечивает извлечение документов, сохраненных в зонах хранения, и выдачу документов пользователям.
Также задачей изобретения является создание электронного банковского автомата, в котором документы могут одновременно транспортироваться, ориентироваться, сохраняться в зонах хранения и выдаваться из других зон хранения в автомате.
Другие задачи настоящего изобретения поясняются в последующем описании наилучших вариантов выполнения изобретения и в пунктах формулы изобретения.
Указанные результаты достигаются в предпочтительном варианте осуществления настоящего изобретения электронным банковским автоматом для рециклирования валюты. Автомат включает в себя зону ввода/вывода, в которую пользователь может ввести документы, которые должны быть помещены в автомат, и из которой пользователь, изымающий документы, может получить эти документы.
Пользователь помещает документы стопкой. Документы перемещаются от зоны ввода/вывода в центральный механизм транспортировки. В зоне разборки стопки документы удаляются из стопки по одному с помощью устройства разборки стопки и разделяются в поток отдельных документов. Документы перемещаются по каналу транспортировки документов в центральном механизме транспортировки. Документы, перемещающиеся в центральном механизме транспортировки, надлежащим образом ориентируются по углу с помощью механизма устранения перекоса относительно направления перемещения вдоль канала транспортировки документов. Документы затем перемещаются с помощью механизма выравнивания для выравнивания их надлежащим образом в центрированное положение относительно канала транспортировки документов.
Каждый документ затем перемещается мимо устройства идентификации типа документа, которое обеспечивает идентификацию и/или определение номинала каждого документа. Идентифицируемые документы направляются в зону депонирования, а неидентифицируемые документы направляются в зону отбраковки зоны ввода/вывода автомата.
Пользователь информируется о любых неидентифицируемых документах посредством устройств ввода и вывода в автомате. Любые неидентифицируемые документы могут затем доставляться к пользователю из зоны отбраковки. Как вариант, в зависимости от программирования автомата и/или ввода данных, осуществленного пользователем, такие отбракованные документы могут быть сохранены в автомате для последующего анализа.
Надлежащим образом идентифицированные документы первоначально удерживаются в зоне депонирования. Устройства вывода в автомате указывают для пользователя тип и/или стоимость идентифицируемых документов. Пользователь может выбрать, следует ли ему возвратить документы или поместить их в автомат. Если пользователь выбирает вариант возвращения ему документов, то документы выдаются из зоны ввода/вывода, а счет пользователя не кредитуется на значение стоимости документов.
Если пользователь выбирает вариант помещения документов в автомат, то документы вновь перемещаются посредством центрального механизма транспортировки в виде потока перемещающихся с высокой скоростью отдельных документов. Документы вновь идентифицируются устройством идентификации. Однако вместо направления их в зоны депонирования и отбраковки идентифицированные документы предпочтительно направляются системой управления автомата в выбранную зону хранения. Зоны хранения представляют собой позиции, в которых документы конкретных типов хранятся в автомате. Зоны хранения автомата в предпочтительном варианте представляют собой съемные контейнеры. Счет пользователя затем кредитуется на величину помещаемых документов.
Тот же самый пользователь, который поместил документы, или последующий пользователь, который хочет осуществить изъятие документов из автомата, может получить документы, которые были ранее сохранены в зонах хранения. Механизмы выдачи документов, связанные с зонами хранения, селективно удаляют документы из зон хранения и направляют документы к центральному механизму транспортировки автомата. Когда документы перемещаются посредством центрального механизма транспортировки, они проходят через устройство идентификации. Тип и номинал каждого выдаваемого документа проверяется. Это гарантирует, что первоначальная идентификация документов, осуществленная при помещении документов в автомат, корректна. Эта третья идентификация снижает риск того, что пользователю, изымающему документы из автомата, могут быть выданы недействительные документы. Документы удаляются из зон хранения одновременно, чтобы обеспечить высокую скорость функционирования автомата, и управляются при перемещении посредством сегментов периферийного механизма транспортировки и центрального механизма транспортировки, чтобы гарантировать их перемещение в виде потока отдельных документов при их прохождении через устройство идентификации.
Идентифицированные документы, подлежащие выдаче пользователю, перемещаются центральным механизмом транспортировки в зону депонирования. Из зоны депонирования они выдаются пользователю. Затем производится списывание со счета пользователя или дебетование его счета с учетом документов, которые были изъяты пользователем.
Система управления в предпочтительном варианте осуществления изобретения содержит распределенную процессорную систему. Процессорная система имеет иерархию, причем наивысший уровень иерархии занимает процессор терминала. Процессор терминала исполняет прикладную программу терминала, осуществляющую обмен данными с внешними устройствами, а также с другими уровнями иерархии системы управления. Процессор модулей находится на более низком уровне иерархии системы управления, чем процессор терминала. Процессор модулей координирует операции в автомате и отслеживает выдачу и прием обрабатываемых в автомате носителей. Процессор модулей обрабатывает содержание команд, получаемых от процессора терминала.
Процессор модулей осуществляет обмен данными с множеством контроллеров модулей. Контроллеры модулей осуществляют обмен данными с устройствами, осуществляющими восприятие, перемещение и направление обрабатываемых в автомате носителей. Контроллеры модулей осуществляют обмен данными с процессором модулей и получают от него команды. Контроллеры модулей выполняют задачи управления физическими устройствами на основе команд, которые они получают от процессора модулей. Задачи, выполняемые контроллерами модулей, реализуют конкретные действия, связанные с командами, получаемыми от процессора модулей.
Иерархия системы управления согласно предпочтительному варианту осуществления изобретения позволяет на каждом уровне выполнять конкретные функции, которые наиболее эффективно обрабатываются на данном уровне. Это обеспечивает обработку с высоким быстродействием, а также координацию между отдельными операциями, в результате чего документы могут перемещаться в автомате одновременно.
Фиг. 1 - схематичное представление поперечного сечения электронного банковского автомата для рециклирования валюты, соответствующего предпочтительному варианту осуществления настоящего изобретения.
Фиг.2 - диаграмма функций, выполняемых автоматом по фиг.1.
Фиг.3 - вид в сечении компонентов центрального механизма транспортировки и зоны ввода/вывода автомата.
Фиг. 4 - вид, подобный показанному на фиг.1, представляющий ввод стопки документов пользователем.
Фиг. 5 - схематичное представление зоны ввода/вывода, показывающее прием стопки документов от пользователя.
Фиг. 6 - вид, подобный показанному на фиг.5, иллюстрирующий стопку документов после ее помещения внутрь автомата.
Фиг. 7 - схематичное представление, подобное показанному на фиг.1, представляющее введенную стопку документов, перемещаемую от зоны ввода/вывода автомата к зоне разборки стопки автомата.
Фиг. 8 - схематичное представление, показывающее стопку, перемещаемую от зоны ввода/вывода в зону разборки стопки.
Фиг. 9 - схематичное представление зоны разборки стопки автомата перед поступлением в нее стопки документов.
Фиг. 10 - схематичное представление зоны разборки стопки, иллюстрирующее стопку документов, транспортируемую в зону разборки стопки.
Фиг. 11 - вид, подобный показанному на фиг.10, иллюстрирующий стопку документов, перемещающуюся в положение для разборки стопки.
Фиг.12 - вид, подобный показанному на фиг.11, иллюстрирующий документы в положении для разборки стопки зоны разборки.
Фиг. 13 - вид, подобный показанному на фиг.1, иллюстрирующий документы, проходящие из зоны разборки стопки через центральный механизм транспортировки к зонам отбраковки и депонирования автомата.
Фиг. 14 - вид, подобный показанному на фиг.12, иллюстрирующий документ, отделяемый от стопки в зоне разборки стопки.
Фиг. 15 - вид, подобный показанному на фиг.14, иллюстрирующий документ, удаленный из стопки и перемещающийся около датчиков для определения наличия сдвоенных документов и для предварительного центрирования.
Фиг.16 - схематичное представление, иллюстрирующее возврат сдвоенных банкнот в стопку.
Фиг. 17 - вид в сечении механизма, используемого для разборки стопки банкнот в зоне разборки.
Фиг. 18 - схематичный вид половины челночного механизма, являющегося частью механизма устранения перекоса, причем показанная половина челночного механизма представлена в положении пропускания банкноты.
Фиг. 19 - вид, подобный показанному на фиг.18, иллюстрирующий половину челночного механизма в положении остановки банкноты.
Фиг. 20 - вид сверху челночного механизма, используемого для устранения перекоса и центрирования документов в центральном механизме транспортировки.
Фиг.21 - схематичный вид банкноты с перекосом.
Фиг. 22 - вид, подобный представленному на фиг.21, иллюстрирующий устранение перекоса банкноты под действием челночного механизма.
Фиг. 23 - вид, подобный представленному на фиг.22, иллюстрирующий банкноту, выровненную в направлении, поперечном направлению перемещения в центральном механизме транспортировки, но имеющую смещение относительно центра.
Фиг. 24 - схематичный вид банкноты, показанной на фиг.23, перемещенной челночным механизмом в центральное положение в центральном механизме транспортировки.
Фиг. 25 - схематичный вид, иллюстрирующий челночный механизм, перемещающий документ поперечно к направлению перемещения в центральном механизме транспортировки.
Фиг. 26 - схематичный вид схемы предварительного центрирования и окончательного центрирования, используемой в предпочтительном варианте осуществления настоящего изобретения.
Фиг. 27 - схематичный вид зоны ввода/вывода автомата, когда документы доставляются от центрального механизма транспортировки.
Фиг. 28 - схематичный вид, подобный представленному на фиг.1, иллюстрирующий выдачу неидентифицируемых документов из автомата пользователю.
Фиг.29 - схематичный вид зоны ввода/вывода, иллюстрирующий вывод неидентифицируемых документов из автомата.
Фиг. 30 - схематичный вид, подобный представленному на фиг.29. иллюстрирующий направление неидентифицируемых документов в автомат для хранения.
Фиг. 31 - схематичный вид, подобный представленному на фиг.1, иллюстрирующий то, как документы, удерживаемые в зоне депонирования, направляются в центральный механизм транспортировки для хранения в автомате.
Фиг.32 - схематичный вид зоны ввода/вывода, перемещающей документы, удерживаемые в зоне депонирования.
Фиг. 33 - схематичный вид, показывающий часть механизма привода для ленточных конвейеров в зоне ввода/вывода.
Фиг. 34 - пространственное представление механизма привода зоны ввода/вывода.
Фиг. 35 - схематичный вид, подобный представленному на фиг.1, показывающий как документы, ранее сохраненные в зоне депонирования, разбираются из стопки и пропускаются через центральный механизм транспортировки в автомат для хранения в зонах хранения контейнеров для хранения документов.
Фиг. 36 - схематичный вид ленточного конвейера и валков каретки, используемых для транспортировки документов в центральном механизме транспортировки автомата.
Фиг. 37 - вид сбоку направляющей, используемой во взаимосвязи с валками каретки.
Фиг. 38 - вид сбоку в сечении валков каретки, ленточных конвейеров для перемещения документов и направляющих, показанных в состоянии удерживания документа.
Фиг.39 - вид сбоку механизма заслонки, используемого для направления документов, перемещающихся в сегментах периферийного механизма транспортировки, причем механизм заслонки показан в положении, при котором обеспечивается проход документа непосредственно через него.
Фиг. 40 - вид сбоку механизма заслонки, показанного на фиг.39, в состоянии пропускания документа от сегмента периферийного механизма транспортировки к механизму транспортировки контейнера.
Фиг. 41 - вид, подобный показанному на фиг.40, причем механизм заслонки показан в состоянии пропускания документа от механизма транспортировки контейнера в сегмент периферийного механизма транспортировки.
Фиг. 42 - вид механизма заслонки, показанного на фиг.39, в состоянии, обеспечивающем возможность прохождения документа от механизма транспортировки контейнера к сегменту периферийного механизма транспортировки, причем документ перемещается в направлении, противоположном показанному на фиг.41.
Фиг. 43 - вид механизма заслонки, показанного на фиг.39, с документом, проходящим от сегмента периферийного механизма транспортировки в механизм транспортировки контейнера, причем документ перемещается в направлении, противоположном показанному на фиг.40.
Фиг. 44 - схематичный вид конфигурации ленточных конвейеров и шкивов рядом с механизмом заслонки, показанным на фиг.39.
Фиг. 45 - схематичное представление механизма транспортировки листов, иллюстрирующего принципы, используемые для перемещения документов в сегментах периферийного механизма транспортировки и в механизмах транспортировки контейнеров.
Фиг. 46 - вид в сечении, показывающий документ, перемещающийся в механизме транспортировки, подобного показанному на фиг.45.
Фиг.47 - вид сверху крышки, накрывающей зону хранения в контейнере повторного использования для валюты.
Фиг.48 - вид в сечении сбоку зоны хранения в показанном контейнере валюты с листом, перемещающимся в направлении зоны хранения.
Фиг.49 - вид, подобный показанному на фиг.48, иллюстрирующий лист, частично принятый в зону хранения.
Фиг. 50 - вид спереди в плане лентопротяжных роликов, роликов удаления и ударных роликов рядом с зоной хранения, причем лист показан перемещающимся в зону хранения, как на фиг.49.
Фиг.51 - вид, подобный показанному на фиг.49, причем лист переместился в зону хранения, но позиционирован над удерживаемой в ней стопкой документов.
Фиг. 52 - вид, подобный показанному на фиг.50, с принятым листом, вложенным в стопку.
Фиг. 53 - вид, подобный показанному на фиг.52, с вновь принятым листом, удерживаемым как часть стопки пальцами, позиционированными рядом с зоной хранения.
Фиг. 54 - схематичный вид, подобный показанному на фиг.1, иллюстрирующий поток листов из зоны хранения в зону депонирования в соответствии с запросом выдачи документов, введенным пользователем.
Фиг. 55 - вид в поперечном сечении зоны хранения, включающей в себя стопку листов, из которой должен быть удален один лист в ходе выполнения операции выдачи.
Фиг. 56 - вид, подобный показанному на фиг.55, в котором пальцы, удерживающие стопку листов в зоне хранения, втянуты для обеспечения взаимодействия листов с внутренней поверхностью дверцы секции.
Фиг. 57 - вид, подобный показанному на фиг.56, на котором дверца секции поднята, причем лентопротяжные ролики и ударные ролики начинают перемещаться так, чтобы захватить лист из стопки.
Фиг. 58 - вид, подобный показанному на фиг.57, на котором лентопротяжные ролики и ударные ролики перемещены в положение, в котором верхний лист в стопке удаляется из нее.
Фиг. 59 - вид спереди лентопротяжных роликов, ударных роликов, роликов снятия верхнего листа и роликов удаления, взаимодействующих с листом в процессе его удаления из стопки так, как показано на фиг.58.
Фиг. 60 - вид, подобный показанному на фиг.58, на котором лист удален из зоны хранения и воспринимается датчиком обнаружения сдвоенных листов.
Фиг.61 - вид сверху дверцы секции, покрывающей зону хранения, из которой удален лист, перемещающийся в направлении механизма заслонки рядом с периферийным механизмом транспортировки.
Фиг. 62 - схематичный вид, подобный показанному на фиг.1, иллюстрирующий стопку листов, выданную из ячеек хранения и доставляемую к пользователю автомата.
Фиг. 63 - схематичное представление архитектуры системы управления в соответствии с предпочтительным вариантом осуществления изобретения.
Фиг. 64-68 - упрощенная блок-схема, показывающая примерную последовательность депозитной транзакции, выполняемой на электронном банковском автомате рециклирования валюты, соответствующем настоящему изобретению.
Фиг. 69 и 70 - упрощенная блок-схема, показывающая примерную последовательность транзакции снятия, выполняемой на автомате.
Фиг.71 - схематичное представление категорий классов, действующих в процессоре модулей, и соотношения между категориями классов.
Фиг.72 - диаграмма, иллюстрирующая принятые условия нумерации карт гнезд и позиций, используемых в процессоре модулей в предпочтительном варианте осуществления изобретения.
Фиг. 73 - схематичное представление карты модулей, формируемой процессором модулей соответственно центральному механизму транспортировки, в предпочтительном варианте осуществления автомата.
Фиг. 74 - схематичное представление карты модулей, формируемой процессором модулей для комбинации механизма транспортировки, контейнера и заслонки, определяемой здесь как мультимедийное средство рециклирования, согласно предпочтительному варианту осуществления изобретения.
Фиг. 75 - таблица событий и действий, возникающих в ответ на события при работе процессора модулей.
Фиг.76 - схематичное представление задач, выполняемых в контроллере модуля, и программы администратора задач, которая также выполняется в нем.
Фиг. 77 - схематичное представление последовательности программного обеспечения для типовой операции приема документов в центральном механизме транспортировки автомата.
На фиг. 1 показан электронный банковский автомат 10 рециклирования валюты, представляющий возможный вариант осуществления изобретения. Автомат содержит корпус 12. Корпус 12 включает в себя пользовательский интерфейс в зоне интерфейса, обозначенной в целом ссылочной позицией 14. Зона интерфейса 14 содержит компоненты, используемые для обмена данными с пользователем автомата. Эти компоненты могут включать в себя дисплей 16, служащий в качестве части устройства вывода. Зона интерфейса может также включать в себя клавиатуру 18 и/или устройство 20 считывания с карточки, которые выполняют функции устройств ручного ввода, посредством которых пользователь может вводить информацию или команды в автомат. Следует иметь в виду, что эти устройства приведены для примера, и могут использоваться другие устройства ввода и вывода, такие как дисплеи с сенсорными экранами, акустические системы, устройства сканирования радужной оболочки глаза, устройства считывания отпечатков пальцев, инфракрасные передатчики и приемники и иные устройства, которые имеют возможность приема или выдачи информации.
Автомат также содержит другие устройства, представленные схематично. К таким устройствам может относиться принтер 22 квитанций, который выдает пользователям квитанции, относящиеся к операциям, осуществляемым в ходе транзакций. К другим таким устройствам, показанным схематично, относится принтер 24 журнала для осуществления бумажной записи транзакций. Принтер 26 сберкнижек, показанный схематично, может также находиться в корпусе автомата. Устройство 28 формирования изображения чеков также может использоваться в целях формирования электронных изображений чеков, помещаемых в автомат, а также для аннулирования таких чеков. Такое устройство формирования изображения чеков может быть выполнено так, как описано в патенте США 5422467, или в виде иного механизма, обеспечивающего реализацию функции формирования изображения.
Устройства 22, 24, 26 и 28 приведены для примера, и в автомат могут быть включены и другие устройства, например видеокамеры для подсоединения к удаленной системе, механизм приема депозитов в конвертах, устройства печатания билетов, устройства для печатания выписок со счетов и другие устройства. Кроме того, следует иметь в виду, что хотя рассматриваемый вариант осуществления изобретения характеризует собой банкомат, однако настоящее изобретение может быть использовано в связи с другими типами электронных банковских автоматов.
Автомат 10 содержит систему управления, обозначенную в целом ссылочной позицией 30. Система управления оперативно соединена с компонентами автомата и управляет их работой в соответствии с программными командами. Система управления 30 также обеспечивает обмен данными с другими компьютерами, связанными с транзакцией, осуществляемой на данном автомате. Такой обмен данными может обеспечиваться любыми подходящими средствами, например посредством телефонных линий, беспроводного канала радиосвязи или посредством соединения через частную сеть для осуществления транзакций.
Предпочтительный вариант осуществления изобретения обеспечивает возможность рециклирования (повторного использования) валюты или иных материалов в виде листов, или документов, представляющих сумму стоимости, полученной от пользователя. Для целей настоящего описания, если не будет указано иное, такие термины, как документы, листы, банкноты, валюта, используются взаимозаменяемым образом при ссылках на материалы в виде листов, обрабатываемые так, как предусмотрено изобретением. Процесс рециклирования включает в себя прием от пользователя документов в массе, целиком, идентификацию типа помещаемых документов и сохранение документов в соответствующих местоположениях в автомате. Сохраненные документы могут затем селективно изыматься и предоставляться пользователям, которые желают изъять денежные средства из автомата.
Предпочтительный вариант осуществления изобретения содержит устройства, которые включают в себя функциональные компоненты, схематично представленные на фиг. 2. Эти функциональные компоненты включают функциональное средство ввода/вывода для приема документов от пользователя и доставки документов пользователю автомата. Функциональное средство 34 разборки стопки получает документы от функционального средства 32 ввода/вывода. Функциональное средство разборки стопки обеспечивает отделение документов от стопки и доставку их в канал транспортировки листов по отдельности, с разнесением друг от друга.
Функциональные компоненты автомата, кроме того, включают в себя функциональное средство 36 устранения перекоса. Как пояснено ниже, функциональное средство устранения перекоса обеспечивает ориентацию документов так, чтобы они были надлежащим образом совмещены в поперечном направлении с каналом транспортировки листов. Функциональное средство 38 выравнивания дополнительно ориентирует перемещающиеся документы путем центрирования их относительно канала транспортировки листов. После того как все документы выровнены, они проходят к функциональному средству 40 идентификации. Функциональное средство идентификации обеспечивает определение типа документа, проходящего в канале транспортировки листов. В предпочтительном варианте осуществления изобретения функциональное средство идентификации предусматривает определение типа и номинала банкноты или иного документа. Функциональное средство идентификации также предпочтительно определяет, представляется ли документ подозрительным или просто является неидентифицируемым.
Функциональное средство идентификации связано с функциональным средством ввода/вывода, так что любые подозрительные документы или неидентифицируемые документы не будут помещаться в автомат, а будут возвращены пользователю. Функциональное средство идентификации также связано с функциональными средствами 42, 44, 46 и 48 хранения и извлечения документов. Функциональные средства хранения и извлечения обеспечивают сохранение документов в выбранных местоположениях и извлечение этих документов для выдачи документов пользователю.
На фиг. 1 схематично представлено устройство, которое выполняет вышеописанные функции. Функция ввода/вывода выполняется в зоне ввода/вывода, обозначенной в целом ссылочной позицией 50. Зона ввода/вывода расположена рядом с отверстием 52 в корпусе автомата. Доступ посредством отверстия 52 контролируется подвижной заслонкой 54, которая на фиг.1 представлена в закрытом положении.
Зона 50 ввода/вывода содержит четыре механизма транспортировки типа ленточного конвейера. Эти ленточные конвейеры представляют собой устройства, пригодные для перемещения стопок листов, и каждый из них включает в себя множество лент, например, как описано в патенте США 5507481. Первые ленточные конвейеры 56 и вторые ленточные конвейеры 58 ограничивают зону 60 доставки/отбраковки, которая проходит вертикально между ленточными конвейерами. Как пояснено ниже, ленточные конвейеры 56 и 58 перемещаются по вертикали один относительно другого и перемещаются координированным образом для транспортировки стопки листов, расположенной между ними.
Зона 50 ввода/вывода также содержит третьи ленточные конвейеры 62 и четвертые ленточные конвейеры 64. Третьи ленточные конвейеры 62 и четвертые ленточные конвейеры 64 ограничивают по вертикали зону депонирования, обозначенную в целом ссылочной позицией 66. Ленточные конвейеры 62 и 64 аналогичны ленточным конвейерам 56 и 58 и могут перемещать стопку документов между ними. Ленточные конвейеры в зоне ввода/вывода, а также заслонка 54 приводятся в действие соответствующими приводами, схематично показанными как блок 68, который управляется системой управления 30. Зона ввода/вывода может работать в различных режимах, примеры которых рассмотрены ниже. На фиг.3 зона 50 ввода/вывода показана более детально.
Зона ввода/вывода сообщается с центральным механизмом транспортировки, обозначенным в целом ссылочной позицией 70. Центральный механизм транспортировки 70 содержит зону разборки стопки, обозначенную в целом ссылочной позицией 72. Зона разборки стопки включает в себя лоток 74, который предназначен для перемещения на нем стопки документов. Зона 72 разборки стопки также включает в себя ленточные конвейеры 76 и ленточные механизмы 78 сортировки. Как будет более подробно пояснено ниже, компоненты в зоне разборки стопки функционируют как устройство разборки стопки для отделения документов и доставки их с пространственным разнесением относительно друг друга в канал транспортировки документов центрального механизма транспортировки.
Операция устранения перекоса предусматривает использование датчиков 80 сдвоенных документов, обеспечивающих обнаружение случаев сдвоенных документов, удаленных из стопки вместе в зоне разборки стопки. Эти документы могут быть разделены, как будет пояснено ниже. Датчики предварительного центрирования также предусмотрены для использования в операции разборки стопки. Эти датчики обеспечивают надлежащее выполнение операций устранения перекоса и выравнивания.
Из зоны разборки стопки листы транспортируются к объединенному устройству 84 устранения перекоса и выравнивания. Устройство 84 устранения перекоса и выравнивания выполняет функции выравнивания листов в поперечном направлении к каналу транспортировки листов. Оно также выполняет функцию перемещения в поперечном направлении листов так, чтобы они были центрированы относительно канала транспортировки листов центральным механизмом транспортировки.
От устройства устранения перекоса и выравнивания документы изменяют направление путем поворота устройством поворота, включающим в себя натяжные валки 86, и перемещаются около устройства 88 идентификации. Устройство 88 идентификации предпочтительно выполнено так, как описано в заявке 08/749260 на патент США от 15 ноября 1996, переуступленной правопреемнику настоящего изобретения. В альтернативных вариантах могут использоваться другие типы устройств идентификации. Устройства идентификации предпочтительно идентифицируют тип и характер проходящей банкноты. Устройство идентификации также предпочтительно обеспечивает различение истинных документов, таких как денежная банкнота, от неидентифицируемых или подозрительных документов.
От устройства идентификации документы направляются селективно в соответствии с положением отклоняющих заслонок 90. Отклоняющие заслонки работают при управлении от системы управления и обеспечивают направление документов либо в зону 60 доставки/отбраковки, либо в зону 66 депонирования, либо в зоны хранения и извлечения документов в автомате.
Зоны хранения и извлечения документов содержат контейнеры 92, 94, 96 и 98 повторного использования, которые будут более детально описаны ниже. Контейнеры повторного использования предпочтительно выполнены съемными, и их снятие с автомата выполняется авторизованным персоналом. В показанном варианте осуществления каждый из съемных контейнеров содержит четыре зоны хранения. Они представлены зонами хранения 100, 102, 104 и 106 в контейнере 94. Зоны хранения обеспечивают местоположения для хранения документов, которые удовлетворительным образом были доставлены центральным механизмом транспортировки. Документы предпочтительно хранятся в зонах хранения с документами одного и того же типа. Документы, сохраняемые в зонах хранения, могут затем быть извлечены или отсортированы из них по одному и доставлены к другим пользователям.
Документы перемещаются к контейнерам посредством периферийного механизма транспортировки, который включает в себя сегменты механизма транспортировки, обозначенные ссылочными позициями 108, 110, 112 и 114. Сегменты периферийного механизма транспортировки предпочтительно конфигурированы с выравниванием, так что документы могут переходить между сегментами механизма транспортировки. Каждый сегмент периферийного механизма транспортировки имеет связанную с ним заслонку на пути распространения. Эти заслонки, обозначенные ссылочными позициями 116, 118, 120 и 122, обеспечивают, как будет пояснено ниже, селективное направление документов от сегментов периферийного механизма транспортировки к соединению с соседними механизмами транспортировки для доставки в контейнеры, обозначенными позициями 124, 126, 128 и 130. Механизмы транспортировки контейнеров функционируют, как будет пояснено ниже, для перемещения документов в зоны хранения в контейнерах и из этих зон.
Следует иметь в виду, что различные компоненты, которые образуют заслонки, механизмы транспортировки и зоны хранения, имеют связанные с ними двигатели и датчики, все они оперативно связаны с системой управления 30 для восприятия и контроля перемещений документов.
Также следует отметить, что в предпочтительном варианте осуществления изобретения предусмотрена зона 132 выгрузки в корпусе автомата, ниже сегментов периферийного механизма транспортировки. Зона 132 выгрузки функционирует в качестве приемника документов, которые определены как непригодные для обработки или которые по иным причинам признаны непригодными для последующего извлечения и выдачи клиенту. В предпочтительном варианте осуществления зона 132 выгрузки содержит лоток, который может перемещаться вне корпуса автомата для обеспечения очистки и удаления документов при получении доступа к автомату.
Работа электронного банковского автомата рециклирования валюты пояснена ниже на примере осуществления операций и функций, выполняемых при проведении пользователем транзакции с депозитом. Следует иметь в виду, что это является лишь одним возможным примером работы автомата. Другие способы выполнения операций и функций могут быть реализованы за счет соответствующего программирования автомата.
Последовательность операций при проведении транзакции с депозитом показана на фиг.64-68. Пользователь приводит в действие компоненты автомата 10, находящиеся в зоне 14 пользовательского интерфейса, для обеспечения работы автомата. Это может включать, например, ввод кредитной или дебетовой карточки и персонального идентификационного номера (ПИН). Разумеется, могут потребоваться другие этапы для выполнения их пользователем, чтобы идентифицировать себя в автомате. Это может включать другие режимы работы, такие как идентификация отпечатков пальцев, или использование устройств идентификации биометрических данных. Эти этапы, выполняемые пользователем для идентификации его в автомате, представлены на фиг.64 последовательностью идентификации пользователя, которая обозначена ссылочной позицией 134.
После того как пользователь идентифицирован автоматом, автомат программируется для осуществления основной последовательности операций транзакции, в целом обозначенной ссылочной позицией 136. Эта основная последовательность операций транзакции предпочтительно предоставляет пользователю меню различных вариантов транзакций, которые доступны для проведения с использованием автомата 10. Последовательность транзакции переходит, согласно фиг.64, к этапу 138, на котором пользователь выбирает вариант проведения транзакции, которая связана с вводом документов, таких как денежные банкноты или ценные бумаги.
Если пользователь указывает, что он намерен осуществить вклад, то автомат затем выполняет этап 140. На этапе 140 внутренняя заслонка 142 (фиг.4 и 5) перемещается для блокировки последующего доступа внутрь автомата из зоны 60 доставки/отбраковки. После того как внутренняя заслонка 142 выдвинута, программа затем выполняет этап 144, на котором передняя заслонка 54 на автомате перемещается для открывания отверстия 52. В данном положении пользователь имеет возможность ввести стопку документов 146 (фиг.5) в зону 60 доставки /отбраковки между ленточными конвейерами 58 и 56. Как показано на фиг. 5, ленточные конвейеры 58 и 56 могут перемещаться вовнутрь, облегчая позиционирование стопки 146 относительно внутренней заслонки 142.
Как показано на фиг. 6, датчики 148 и 150 доставки и приема размещены внутри корпуса автомата рядом с отверстием 52. В последовательности транзакции, как показано на фиг.64, выполняется этап 152 для определения того, прошла ли стопка 146 мимо датчиков. На этапе 154 определяется, находятся ли датчики в исходном состоянии (в состоянии очистки). Если датчики 148, 150 не очищены, то выполняется этап 154. На этапе 154 осуществляются действия по очистке датчиков. Это делается путем перемещения ленточных конвейеров 56 и 58 внутрь на этапе 156 и выдачи подсказки пользователю на этапе 158 ввести свой депозит. Затем вновь проводится проверка того, очищены ли датчики. Предусмотрены меры в последовательности транзакции, чтобы после ряда попыток очистить датчики ленточные конвейеры 56 и 58 перемещались в обратном направлении, чтобы удалить любой объект, введенный в автомат, и заслонка 54 закрывается.
Если, однако, датчики 148 и 150 очищены, что указывает на то, что стопка документов введена надлежащим образом, последовательность транзакции переходит к этапу 160, на котором передняя заслонка 54 вновь закрывается, как показано на фиг.6. Последовательность транзакции затем переходит к этапу 162, на котором внутренняя заслонка 142 втягивается, так что стопка 146 может обрабатываться дальше, как будет описано ниже.
Стопка затем перемещается, как схематично показано на фиг.7, от области 60 доставки/отбраковки к области 72 разборки стопки. Это выполняется, как показано на фиг.65, путем перемещения каретки, которая поддерживает четыре ленточных конвейера 64, вверх в зону 50 ввода/вывода, как показано на фиг.8. Каретка для ленточных конвейеров 64 перемещается вверх приводом, содержащим двигатель и механизм трансмиссии, для сцепления с кареткой, поддерживающей ленточные конвейеры 62 и 58, и для перемещения ее вверх. Каретка перемещает их вперед до тех пор, пока стопка 146 не окажется зажатой между ленточными конвейерами 56 и 58. Это представлено этапом 164 на фиг.65. Ленточные конвейеры 58 и 56 затем приводятся в движение для перемещения стопки внутрь в направлении зоны 72 разборки стопки.
Зона 72 разборки стопки, которая включает в себя компоненты, содержащие устройство разборки стопки, более детально показана на фиг.9. Она содержит ленточные конвейеры 76 и ленточные механизмы 78 сортировки, которые независимо приводятся в движение двигателями и/или другими подходящими приводными устройствами. Ограничитель 166 обратного хода установлен с возможностью перемещения в зоне между ленточными конвейерами 76 и ленточными конвейерами 168 на лотке 74. Следует иметь в виду, что ленточные конвейеры 76, 78, 168 размещены так, что они находятся в промежуточном положении, когда лоток 74 движется рядом с ними, как описано в патенте США 5507481.
Зона 72 разборки стопки содержит стенку 170 разборки стопки. Стенка 170 разборки стопки содержит множество ступенек 172, назначение которых пояснено ниже. Ступеньки имеют в поперечном сечении поверхности, перпендикулярные одна другой. Стенка 170 разборки стопки имеет множество проходящих в основном вертикально щелей (не показаны). Лоток 74 содержит множество выступов 174, которые проходят от верхней поверхности лотка и внутрь щелей. Рядом с ленточным механизмом 78 сортировки находятся ролики 176 контактного
механизма отделения и ролики 178 бесконтактного механизма отделения, функция которых описана ниже.
В процессе работы автомата стопка 146 перемещается в зону разборки стопки для осуществления разборки. Это представлено этапом 180 на фиг.65. Как показано на фиг. 10, на этапе перемещения стопки 146 в зону разборки стопки лоток 74 сдвигается в достаточной степени в сторону от ленточных конвейеров 76 с помощью механизма перемещения, так что стопка 146 может перемещаться между ними. Ограничитель 166 обратного хода поднимается механизмом перемещения для обеспечения возможности ввода стопки. Ленточные конвейеры 76 и ленточные механизмы 78 сортировки перемещаются вперед так, что стопка 146 перемещается в направлении стенки 170 для разборки стопки. В предпочтительном варианте осуществления изобретения лоток 74 подпружинен со смещением в направлении вверх, и после ввода стопки 146 она удерживается между ленточными конвейерами 168 на лотке 74 и ленточными конвейерами 76 и ленточными механизмами 78 сортировки смещающим усилием, действующим на лоток.
Как показано на фиг.11, после того как стопка 146 пройдет мимо ограничителя 166 обратного хода, ограничитель обратного хода опускается и занимает положение позади стопки. Как пояснено ниже, ограничитель обратного хода особенно эффективен при отделении сдвоенных банкнот, которые могут быть отделены вместе в процессе операции разборки стопки. Как показано на фиг.11, ленточные механизмы 78, кроме того, перемещаются в направлении вперед для перемещения стопки 146 к стенке 170. Как показано на фиг.12, когда стопка полностью сдвинута к стенке 170, то эта наклонная стенка и ступеньки 172 на ее поверхности стремятся растянуть листы в стопке. Это растягивание листов нарушает поверхностное натяжение между соседними листами и облегчает отделение каждого соседнего листа в стопке. Следует отметить, что ступеньки 172 выполнены так, что сцепление листов в стопке 146 со ступеньками 172 не создает помех перемещению лотка 74 вверх, по мере того как листы удаляются из стопки. Это позволяет лотку 74 прикладывать постоянное смещающее усилие вверх, так что самый верхний лист в стопке захватывается ленточными механизмами 78 сортировки.
В соответствии с последовательностью транзакции, показанной на фиг.65, как только стопка переместится в положение разборки стопки, на этапе 182 осуществляется проверка наличия банкнот в зоне разборки стопки. Если банкноты находятся в надлежащем положении, процедура переходит к подпрограмме разборки стопки на этапе 184. Как описано ниже более детально, система управления 30, соответствующая настоящему изобретению, представляет собой систему управления нового типа, которая обеспечивает высокое быстродействие автомата. Как представлено показанным пунктиром этапом 186, система управления обеспечивает одновременное выполнение задач. В результате вместо того, чтобы отделять отдельную банкноту, как описано ниже, и затем ожидать ее обработки, предпочтительный вариант выполнения системы 30 управления обеспечивает отделение банкноты и, как только она покинет зону разборки стопки, переход к отделению другой банкноты. Это позволяет получить поток отделенных друг от друга листов, которые одновременно перемещаются в центральном механизме транспортировки при управлении от системы управления. Это в значительной степени ускоряет работу автомата.
Выполнение автоматом операции разборки стопки схематично представлено на фиг. 13. Как показано на чертеже, стопка 146 в зоне 72 разборки стопки разделена на поток отдельных листов, которые перемещаются посредством центрального механизма 70 транспортировки в направлении стрелки С. Банкноты затем, как пояснено ниже, селективно направляются с помощью механизма направления, содержащего отклоняющие заслонки 90, либо в зону 60 доставки/отбраковки, либо в зону 66 депонирования.
Работа механизма разборки стопки по отделению листов из стопки в зоне 72 разборки стопки поясняется со ссылками на фиг.14-17. Стопка 146 смещена вверх к ленточным механизмам 78 сортировки с помощью лотка 74. Нижняя ветвь ленточных механизмов 78, которая взаимодействует с верхним листом в стопке, перемещается влево (фиг.14) для захвата листа 188. Как показано на фиг.17, ленточные механизмы 78 сортировки опираются на валки и проходят за пределы внешней периферии роликов 178 примыкающего бесконтактного механизма отделения. Ролики 176 контактного механизма отделения располагаются вообще с примыканием напротив внутренних двух ленточных механизмов 78 сортировки. Когда ленточные механизмы сортировки перемещаются влево, как показано на фиг.14, ролики 176 и 178 контактного и бесконтактного механизмов отделения не двигаются. Это служит для удержания листов иных, чем верхний лист, в стопке.
В соответствии с фиг.14, если лист 188, который перемещается от стопки, представляет собой одиночный лист, то это состояние воспринимается датчиками 80 обнаружения сдвоенных документов. Это означает, что такой лист пригоден для перемещения в центральном механизме транспортировки. Лист затем проходит мимо датчиков 80 и подходит к валкам 190, 192. В ответ на обнаружение листа как одиночного, валок 192 отвода перемещается под действием системы управления из положения, показанного пунктиром, в положение, показанное сплошной линией, при котором он взаимодействует с листом 188. Валки 192, 190 отвода приводятся в движение в направлениях, показанных на чертеже, чтобы убрать лист из стопки. Управление движением валков отвода по времени осуществляется системой управления 30 для обеспечения того, чтобы лист 188 находился на необходимом расстоянии от предыдущего отделенного от стопки листа, перемещающегося посредством центрального механизма транспортировки.
Как показано на фиг.15, лист 188 перемещается валками 190 и 192 отвода, которые служат в качестве устройства отвода, мимо датчиков 82 предварительного центрирования. Датчики предварительного центрирования функционируют, как будет пояснено более подробно ниже, для восприятия положения поперечно противолежащей пары боковых краев листа. Сигналы от датчиков 82 предварительного центрирования используются системой 30 управления для перемещения челночного устройства, которое связно с операциями устранения перекоса и центрирования листа. Система управления обеспечивает перемещение челночного устройства в поперечном направлении к каналу транспортировки в положение, в котором оно может захватить перемещающийся лист таким образом, чтобы обеспечить его выравнивание. Эта особенность особенно важна, если листы, удаляемые из стопки, имеют различные размеры.
Следует иметь в виду, что хотя денежные банкноты США имеют одинаковый размер независимо от номинала, в других странах используются документы различных размеров для разных типов валюты. Основным преимуществом настоящего изобретения является то, что документы, вводимые пользователем, не требуется упорядочивать так, чтобы все они имели одинаковые размеры или чтобы все документы были ориентированы в каком-либо определенном направлении для их обработки согласно предпочтительному варианту осуществления изобретения. Устройство разборки стопки в описанном варианте особенно эффективно приспособлено для разборки листов, которые имеют различные размеры и которые могут быть ориентированы не обязательно с совмещением со стенкой 170, в частности, для листов в середине стопки 146.
В случае, если датчики 80 обнаружения сдвоенных листов обнаруживают сдвоенные банкноты или документы, то такие банкноты могут быть разделены. Сдвоенные банкноты на фиг. 16 показаны как листы 194, которые для целей настоящего описания рассматриваются как два перекрывающихся листа. Для разделения этих листов ленточные механизмы 78 сортировки останавливаются, и лоток 74 перемещается вниз под действием системы управления, так что стопка 146 больше не смещается к нижним сторонам ленточных механизмов 78 сортировки.
Затем ленточные механизмы 78 сортировки запускаются в обратном направлении, так что их нижняя сторона перемещается вправо, как показано на чертеже. Это втягивает листы 194 опять в стопку. Ролики 176 контактного механизма отделения и ролики 178 бесконтактного механизма отделения также вращаются для облегчения втягивания листов обратно в стопку. Это выполняется в предпочтительном варианте осуществления за счет воздействия на ролики механизмов отделения односторонней муфтой. Ролики механизмов отделения могут свободно вращаться в направлении, показанном на фиг.16, но не могут вращаться в противоположном направлении. Перемещение ленточных механизмов 78 втягивает листы 194 назад в стопку. Ограничитель обратного хода препятствует избыточному перемещению листов назад и выпадению из стопки.
После того как листы 194 возвращены наверх стопки, лоток 74 вновь поднимается и делается попытка операции отделения. В общем случае одна или несколько повторяющихся попыток отделения листов будут успешными, так что листы последовательно отделяются из стопки 146 один за другим.
Последовательность транзакции, связанная с обнаружением сдвоенных документов и попытками отделить верхний лист, представлена на фиг.65. На этапе 196 определяется, обнаружены ли сдвоенные документы в процессе выполнения подпрограммы разборки стопки. Если это так, то выполняется этап 198, связанный с отводом стопки вниз. Ленточные механизмы сортировки реверсируются на этапе 200 для втягивания сдвоенных документов назад в стопку, и затем стопка вновь поднимается на этапе 202. Как описано выше, процедура разборки стопки затем запускается вновь. Разумеется, если сдвоенные документы не обнаружены при сортировке листа, то лист перемещается мимо датчиков 82 предварительного центрирования, и на этапе 204 определяется поперечное положение банкноты в механизме транспортировки.
После того как документ прошел датчики предварительного центрирования, он затем перемещается к объединенному устройству 84 устранения перекоса и выравнивания. Устройство устранения перекоса предназначено для захвата перемещающегося листа и выравнивания его переднего края в поперечном направлении по отношению к направлению движения листа в канале транспортировки листов. После того как передний край листа выровнен в поперечном направлении, устройство 84 обеспечивает перемещение листа так, чтобы его центральная линия совпадала с центральной линией канала транспортировки. Эти операции обеспечивают более быструю идентификацию документа по причинам, которые будут пояснены ниже.
Как показано на фиг.20, объединенное устройство 84 устранения перекоса и выравнивания включает в себя челночное устройство 204, состоящее из двух половин 206 и 208. Каждая половина челночного устройства соединена с валом 210 привода, который обеспечивает перемещение прижимных роликов 212 и 214 на половинах челночного устройства, как будет описано ниже. Челночное устройство 204 также может перемещаться в поперечном направлении на приводном валу 210. Челночное устройство также содержит первый датчик 216, расположенный рядом с первой половиной 206 челночного устройства, и второй датчик 218, расположенный рядом со второй половиной 208 челночного устройства. Челночное устройство также содержит датчик середины 220. Зажимные ролики сцепляются с сегментированным промежуточным валом 222.
На фиг. 18 показана первая половина 206 челночного устройства. Первая половина челночного устройства содержит соленоид 224, соединенный с подвижной тормозной тягой 226, которая имеет возможность перемещения на штифтах 228. Прижимной ролик 212 вращается относительно центрального штифта 230. Центральный штифт 230 установлен с возможностью перемещения в щели 232 в корпусе первой половины 206 челночного устройства.
Приводной вал 210 представляет собой шлицевой вал, как показано на чертеже. Вал 210 проходит через приводной ролик 234, который установлен для вращения на корпусе первой половины 206 челночного устройства.
Как показано на фиг. 18, когда на соленоид 224 не подано возбуждение, прижимной ролик 212 смещен для зацепления с приводным роликом 234 посредством пружины 236. Прижимной ролик 212 вращается в ответ на вращение приводного вала 210. Вращение прижимного ролика 212 также приводит к зацеплению независимо вращающихся сегментов сегментированного вала 222. Документы имеют возможность проходить через зазор между прижимными роликами 212 и сегментированным валом 222 в ответ на вращение прижимного ролика 212 приводным роликом 234.
Как показано на фиг.19, когда соленоид 224 возбуждается, тормозная тяга 226 поворачивается. Движение тормозной тяги приводит к зацеплению тормозной тяги с прижимным роликом 212. При взаимодействии тормозной тяги с прижимным роликом прижимной ролик смещается относительно приводного ролика 234 и не может перемещаться до тех пор, пока соленоид не будет снова обесточен и тормозная тяга будет втянута. В результате любой документ, позиционированный в зазоре между прижимным роликом 212 и сегментированным валом 222 при возбуждении соленоида, будет остановлен в этом положении. Документы не имеют возможности перемещаться в область зазора до тех пор, пока соленоид не будет обесточен.
Работа челночного устройства схематично представлена на фиг.21-24. Как показано на фиг.21, лист документа 238 перемещается в направлении стрелки в канале транспортировки листов. Челночное устройство перемещается перед приходом листа в поперечном направлении на приводном валу 210 так, чтобы прижимные ролики 212 и 214 захватили лист. Это обеспечивается системой управления 30 на основе сигналов от датчиков 82 предварительного центрирования, которые размещены перед челночным устройством 204. Челночное устройство перемещается в поперечном направлении в канале транспортировки листов с помощью быстродействующего двигателя или другого подходящего устройства.
Когда лист 238 перемещается в зону рядом с прижимными роликами, датчики 216, 218, 220 обнаруживают лист. Ввиду перекоса листа 238 датчик 218, расположенный рядом с прижимным роликом 214, первым обнаружит передний край листа. Когда это происходит, соленоид, связанный с половиной 208 челночного устройства, возбуждается, останавливая перемещение прижимного ролика 214, в то время как ролик 212 продолжает вращаться в соответствии с вращением вала 210. В результате лист 238 начинает поворачиваться относительно области точки 240 прижатия, созданной между неподвижным роликом 214 и сегментированным валом 222. Лист 238 перемещается так, что его передний край 242 начинает перемещаться до достижения выровненного положения в направлении, поперечном направлению перемещения листа.
Как показано на фиг.23, лист 238 поворачивается относительно точки 240 прижатия до тех пор, пока передний край 242 не будет выровнен в поперечном направлении относительно канала транспортировки листов. Когда выровненное положение достигнуто, соленоид 224 предпочтительно возбуждается для остановки перемещения прижимного ролика 212. Это формирует вторую точку прижатия 244 между банкнотой 238 и промежуточным валом 222.
В состоянии остановки банкноты, показанной на фиг.23, передний край 242 листа выступает в канале транспортировки листа за пределы датчиков центрирования 246. Датчики центрирования обнаруживают боковые края 248, 250 листа (фиг.23), как описано ниже. После обнаружения боковых краев система управления 30 определяет положение центральной линии, которая проходит через центральную часть листа 238. Эта центральная линия 252 показана на фиг.23. Затем челночное устройство перемещает лист поперечно, как показано на фиг. 25. Лист перемещается в зажатом состоянии между прижимными роликами 212 и 214 и сегментированным промежуточным валом 222. Как показано на фиг.24, лист 238 перемещается вправо, так что центральная линия 252 листа совмещается с центральной линией канала 254 транспортировки листов.
После того как перекос листа устранен, как описано выше, и обеспечено перемещение листа центрированным образом относительно канала транспортировки листов, соленоиды, приводящие в действие прижимные ролики 212 и 214, одновременно отпускаются для высвобождения листа 238 из челночного устройства. Это выполняется для обеспечения того, чтобы лист 238 находился на требуемом расстоянии относительно предыдущего листа. В оптимальном случае лист не задерживается дольше, чем необходимо для обеспечения надлежащей ориентации листа.
Схематичное представление компонентов схемы центрирования, которая является частью системы управления автомата и которая используется во взаимосвязи с датчиками 246 центрирования и с датчиками 82 предварительного центрирования, показано на фиг.26. В предпочтительном варианте осуществления изобретения датчики 246 включают в себя приборы с зарядовой связью (ПЗС), которые используются для обнаружения краев листа. Датчик имеется с каждой стороны от канала транспортировки листов. На противоположной стороне имеется излучатель для создания источника излучения для обнаружения краев листа. Сигналы от датчиков 246 передаются к усилителю 256. Сигналы от усилителя направляются к компаратору 258, обеспечивающему цифровое преобразование. Компаратор 258 получает пороговый входной сигнал от интерфейса 260.
Точка выдачи сигнала с интерфейса 260 определяется с помощью подпрограммы, которая регулирует ввод порогового значения, соответствующего обнаружению банкноты, с учетом излучения, принимаемого датчиками в состоянии, когда банкнота отсутствует. Это позволяет отрегулировать датчики с учетом изменений в процессе работы устройства, например изменений в интенсивности излучения излучателей или изменения степени загрязнения на излучателях или датчиках.
Выходной сигнал цифрового компаратора передается к программируемому логическому устройству 262. Программируемое логическое устройство определяет положение края банкноты и передает выходные сигналы вместе с сигналами таймера к процессору 264. Процессор генерирует сигналы в соответствии с его программированием для перемещения устройства поперечного перемещения, обеспечивающего поперечное перемещение челночного устройства в желательное положение. В случае датчиков предварительного центрирования челночное устройство перемещается в положение, гарантирующее обнаружение банкноты. В случае датчиков, используемых для реализации операций центрирования и устранения перекоса, челночное устройство перемещается так, чтобы банкнота была выровнена относительно центра механизма транспортировки. Сигналы синхронизации обеспечивают отслеживание того, когда передний и задний края банкноты обнаруживаются датчиками, чтобы система управления могла поддерживать требуемое расстояние между банкнотами в центральном механизме транспортировки. Сигналы с датчиков 246, а также сигналы с датчиков 216, 218 и 220 на челночном устройстве используются для обеспечения того, чтобы высвобожденная банкнота перемещалась дальше надлежащим образом.
Логическая последовательность, связанная с операциями устранения перекоса и выравнивания, в описываемом варианте осуществления представлена со ссылками на этапы, показанные на фиг.65. Как показано с помощью этапа 266, сигналы от датчиков 82 предварительного центрирования используются системой управления для перемещения челночного механизма так, чтобы обеспечить захват им банкноты. Этап 268 устранения перекоса реализуется, как описано выше для случая выравнивания переднего края банкноты, чтобы она была ориентирована поперечно направлению перемещения листа механизмом транспортировки. На этапе 270 центральная линия листа смещается до совмещения с центральной линией механизма транспортировки листов. После устранения перекоса и выравнивания лист выдается на этапе 272 с определенной выдержкой по времени и продолжает свой путь в канале транспортировки листов.
Как показано на фиг. 13, после того как документ проходит через устройство устранения перекоса и выравнивания, документ перемещается через зону центрального механизма транспортировки, где он воспринимается различными датчиками, связанными с устройством 88 идентификации. В предпочтительном варианте осуществления изобретения устройство идентификации включает в себя устройство, описанное в заявке 08/749260 на патент США от 15 ноября 1996, включенной в данное описание полностью в качестве ссылки. Это устройство идентификации обеспечивает идентификацию типа и номинала проходящего документа. Оно также обеспечивает возможность различения действительных документов от подозрительных документов. Преимуществом устройства, используемого в описываемом варианте осуществления, является его возможность идентифицировать документ даже в тех случаях, когда документ не был надлежащим образом совмещен с каналом транспортировки листов. Следует иметь в виду, что ввиду различных условий, несмотря на попытки ориентировать каждый лист, могут иметь место некоторые отклонения от правильной ориентации листов в момент их анализа устройством идентификации. Разумеется, в других вариантах осуществления могут быть использованы другие устройства для классификации и идентификации листов.
В результате анализа банкноты устройством 88 идентификации формируются сигналы. Эти сигналы указывают на тип и номинал банкноты. Альтернативно, сигналы могут указывать на то, что банкнота не может быть удовлетворительно идентифицирована или что она недействительна. Эти сигналы передаются в систему управления 30, которая задействует отклоняющие заслонки 90, расположенные рядом с центральным механизмом транспортировки. Как показано на фиг.27, в предпочтительном варианте осуществления документы, которые не могут быть идентифицированы с высокой степенью достоверности или которые иным образом классифицированы как неприемлемые для автомата, направляются заслонками 90 в зону 60 доставки и выдачи и помещаются на вторые ленточные конвейеры 58. Такие отбракованные банкноты представлены на фиг.27 стопкой 274.
Идентифицированные документы, пригодные для вклада, направляются отклоняющей заслонкой 90 в зону 66 депонирования, где эти банкноты помещаются на ленточные конвейеры 64. Такие идентифицированные документы представлены на фиг.27 стопкой 276. Следует иметь в виду, что направление идентифицированных листов в положение 266 депонирования является факультативным, в зависимости от программирования системы управления 30 автомата или от пользовательских вводов данных на интерфейсе автомата. Идентифицируемые банкноты могут направляться в соответствующие зоны хранения автомата для последующего изъятия.
Последовательность транзакции, связанная с анализом документов и направлением их в зоны доставки/отбраковки и депонирования, представлена на фиг. 66. Анализ перемещающихся документов представлен этапом 278. Если банкнота надлежащим образом идентифицирована на этапе 280, то затем на этапе 282 осуществляется проверка того, находится ли автомат в режиме депозита (приема вклада). Если это так, то надлежащим образом идентифицированные банкноты направляются к зонам хранения в контейнерах повторного использования. Если автомат не находится в данный момент в режиме депозита, что имеет место для описываемого примера, то надлежащим образом идентифицированные банкноты направляются в зону депонирования на этапе 284.
Если на этапе 280 банкнота не идентифицирована или идентифицирована как неприемлемая, то она направляется в зону отклонения на этапе 286. Разумеется, необходимо иметь в виду, что этапы разборки стопки, предварительного центрирования, устранения перекоса, выравнивания и идентификации банкнот выполняются одновременно, когда каждый из документов в потоке документов проходит через центральный механизм транспортировки. Банкноты непрерывно перемещаются в позиции депонирования или отбраковки до тех пор, пока стопка банкнот не будет полностью разобрана.
В процессе работы в соответствии с предпочтительным вариантом осуществления изобретения листы, не принимаемые автоматом, такие как неидентифицированные листы и листы, воспринимаемые как подозрительные, возвращаются пользователю из зоны 50 ввода/вывода. Это схематично представлено на фиг.28, где показана отбракованная стопка 274, доставляемая пользователю через отверстие 52. Это обычно осуществляется автоматом после представления пользователю посредством интерфейса 14 информации о числе неидентифицированных или не принятых листов в стопке депозита, в которой они были введены. Пользователю может быть сообщено посредством интерфейса о стоимости, соответствующей документам, которые были надлежащим образом идентифицированы. В альтернативных вариантах пользователю может быть предоставлена возможность повторного ввода в пользовательский интерфейс, чтобы повторно попытаться идентифицировать отбракованные листы. Если это происходит, то автомат может быть запрограммирован для пересылки отбракованной стопки 274 вновь через центральный механизм транспортировки так, как уже делалось ранее со стопкой депозита. Это вопрос выбора при программировании автомата, и конкретный выбранный подход зависит от предпочтений оператора автомата.
Если предполагается, что отбракованная стопка 274 должна возвращаться пользователю, то эта отбракованная стопка доставляется пользователю автомата так, как показано на фиг.29. Внутренняя заслонка 142 вытягивается, когда опирающиеся на каретку ленточные конвейеры 64 поднимаются, так что стопка 276 захватывается опирающимися на каретку ленточными конвейерами 62 и 58. Ленточные конвейеры 58 поднимаются таким образом, что отбракованная стопка 274 захватывается ленточными конвейерами 56. Когда отбракованная стопка 274 оказывается зажатой между ленточными конвейерами 56 и 58, открывается заслонка 54. Отбракованная стопка 274 перемещается ленточными конвейерами 56 и 58 через отверстие 52 в корпусе автомата. Датчики 148 и 150 доставки и приема, расположенные рядом с отверстием 52, обнаруживают перемещение стопки.
Последовательность транзакции, связанная с доставкой отбракованной стопки к пользователю, представлена на фиг.66. На этапе 288 определяется, имеются ли еще банкноты в отбракованной стопке, после того как все листы разобраны и прошли через центральный механизм транспортировки. Если это так, то отбракованная стопка на этапе 290 перемещается в положение доставки. Внутренняя заслонка на этапе 292 закрывается, как показано на фиг.29. Передняя заслонка открывается на этапе 294, и ленточные конвейеры приводятся в действие для доставки отбракованной стопки к пользователю на этапе 296.
Как показано на фиг.67, пользователю затем может быть предложено на этапе 298 забрать отбракованную стопку. Это делается посредством пользовательского интерфейса. Датчики 148 и 150 затем контролируются на этапе 300, и на этапе 302 принимается решение о том, была ли взята пользователем отбракованная стопка. Если листы были изъяты, то передняя заслонка 54 автомата закрывается на этапе 304, и внутренняя заслонка втягивается на этапе 306.
Как описано выше, в представленном варианте осуществления изобретения пользователю предлагается забрать отбракованные листы. Поэтому, если на этапе 302 пользователь не забрал эти листы, то механизм транспортировки включается для выталкивания листов из отверстия 52 на этапе 308. После того как механизм транспортировки в достаточной степени протолкнул листы вовне, передняя заслонка закрывается.
В альтернативных вариантах осуществления изобретения пользователь имеет возможность повторно попытаться определить для отбракованной стопки, можно ли идентифицировать содержащиеся в ней документы. Это делается в ответ на ввод данных пользователем через устройство ввода интерфейса. В других альтернативных вариантах осуществления автомат может быть запрограммирован так, чтобы не возвращать неидентифицируемые или отбракованные листы пользователю. Это может быть сделано для того, чтобы предотвратить возможность повторного введения фальшивых документов в оборот. Если автомат запрограммирован таким образом, то отбракованная стопка 274 может быть перемещена так, как показано на фиг. 30, обратно в зону разборки стопки автомата для дальнейшего прохода через центральный механизм транспортировки. В этом втором проходе листы могут быть либо вновь возвращены в зону отбраковки, если их невозможно идентифицировать, либо помещены в зону депонирования, если они могут быть идентифицированы, либо они могут быть переданы в ячейку хранения в контейнерах повторного использования или в зону 132 разгрузки для последующего анализа. Поскольку в предпочтительном варианте осуществления настоящего изобретения имеется возможность отслеживания отдельных листов, которые пропускаются через автомат, то автомат может следить за тем, откуда поступают отдельные листы, с учетом их ячейки хранения и местоположения в ячейке хранения.
Возвращаясь к описанию работы варианта осуществления изобретения, отметим, что стопка 276, удерживаемая в зоне депонирования, затем перемещается вверх в зону ввода/вывода, как показано на фиг.31. В этот момент пользователю может быть предоставлена опция получения назад идентифицированных листов, которые он поместил в автомат. Это может иметь место, например, в случае, когда пользователь не согласен с результатом счета листов автоматом. Это может быть обеспечено программированием автомата так, чтобы пользователь мог получить назад свои документы, находящиеся в зоне депонирования, с помощью соответствующего ввода данных на интерфейсе.
Если автомат запрограммирован для помещения вклада идентифицированных документов, удерживаемых в зоне депонирования, то автомат перемещает стопку документов 276 так, как показано на фиг.31. Как вариант, стопка, находящаяся в зоне депонирования, должна перемещаться так, как показано на фиг.31, если автомат требует от пользователя осуществить ввод данных для помещения документов, находящихся в зоне депонирования, и такой ввод данных осуществляется с помощью пользовательского интерфейса.
Если депонированная стопка 276 должна быть помещена в ячейку хранения в автомате, то ленточный конвейер 64 поднимается в положение, показанное на фиг. 32, и депонированная стопка 276 зажимается между ленточными конвейерами 62 и 64. Ленточные конвейеры затем приводятся в действие для перемещения депонированной стопки 276 в зону разборки стопки автомата, как было описано выше.
Работа приводных валков и подвижных кареток ленточных конвейеров зоны 50 ввода/вывода описана ниже более детально со ссылками на фиг.33 и 34. Каретка, связанная с ленточными конвейерами 64, перемещается вверх и вниз с помощью приводного механизма. Каретка, поддерживающая ленточные конвейеры 62 и 58, является свободно плавающей, но ограничена в степени перемещения вниз. Каретка, поддерживающая ленточные конвейеры 56, может путем поворота совмещаться с положением соседней стопки, но в принципе не может перемещаться вниз. Эта конфигурация минимизирует сложность механизма ввода/вывода.
В предпочтительном варианте осуществления изобретения каретки, поддерживающие ленточные конвейеры 64, 62 и 68, управляются для перемещения по вертикали первым направляющим/приводным валом 310 и вторым направляющим/приводным валом 312. Направляющие/приводные валы не только проходят по вертикали, но и являются шлицевыми валами, имеющими возможность поворота в показанном направлении с помощью соответствующих механизмов привода и трансмиссии. Подвижные блоки 314 и 316 буксовых направляющих имеют возможность перемещения по вертикали на валу 310. Каждый блок буксовой направляющей, представленный направляющим блоком 314 на фиг.33, включает в себя конические зубчатые колеса 318. Конические зубчатые колеса обеспечивают передачу вращательного движения от направляющего/приводного вала 310 на валы 320 и 322. Валы 320, 322 включают валки, на которые опираются ленточные конвейеры 56 и 58 соответственно.
Блоки 324 и 326 буксовых направляющих выполнены подвижными относительно вала 312. Как показано на фиг.33 на примере блока 324 буксовых направляющих, блок буксовых направляющих содержит конические зубчатые колеса 328, которые обеспечивают передачу вращательного движения направляющего/приводного вала 312 на валы 330 и 332. Ленточные конвейеры 62 и 64 опираются на валки, которые приводятся в движение валами 330 и 332 соответственно.
Как можно видеть, данная конфигурация для привода ленточных конвейеров в зоне ввода/вывода снижает сложность конструкции по сравнению с другими вариантами выполнения. Данное выполнение также повышает гибкость в селективном позиционировании стопок документов.
Что касается примера последовательности транзакции с депонированной стопкой 276 в позиции, показанной на фиг.31, то последовательность транзакции продолжается, как показано на фиг.67. Как показано на этапе 334, депонированная стопка перемещается вверх и занимает положение либо для выдачи пользователю, либо для перемещения назад в зону разборки стопки. Затем пользователю предлагается на этапе 336 указать, хочет ли он вернуть депонированную стопку документов или поместить сумму денежных средств, соответствующую депонированной стопке, в автомат. Как показано на этапе 338, если пользователь выбирает вариант возврата стопки, то автомат осуществляет операции по ее возврату пользователю.
Процедура возврата стопки документов представлена на фиг.68. К этому моменту в последовательности транзакции депонированная стопка 276 находится рядом с отверстием 52 и может быть легко доставлена к пользователю. Внутренняя заслонка закрывается на этапе 340, а передняя заслонка открывается на этапе 342. Ленточные конвейеры 62 и 64 приводятся в движение для перемещения депонированной стопки вовне и представления ее пользователю на этапе 344. Затем на этапе 346 определяется, забрал ли пользователь стопку. Это решение принимается на основе сигналов датчиков 148 и 150. Если датчики определяют, что пользователь забрал стопку, то автомат возвращается к основной последовательности транзакции банкомата на этапе 348.
Если пользователь не забрал стопку, то выполняются этапы, на которых пользователю предлагается забрать стопку или вернуть ее в автомат. Если на этапе 346 датчики не воспринимают факт изъятия стопки, то пользователю предлагается посредством интерфейса забрать стопку на этапе 350. Если затем определяется, что стопка изъята, то на этапе 352 автомат возвращается к основной последовательности транзакции. Если стопка по-прежнему не изъята, процедура транзакции проходит через этапы 354 и 356, на которых стопка возвращается для хранения, при этом регистрируется нерегулярная транзакция. Это может быть осуществлено, например, втягиванием стопки в автомат, закрытием заслонки и перемещением стопки посредством центрального механизма транспортировки в одну из зон хранения.
Альтернативные формы осуществления изобретения могут предусматривать кредитование счета пользователя на суммы, которые указываются как те, которые должны были быть выданы пользователю, но этого не произошло. Если автомат программируется так, чтобы функционировать указанным образом, то документы, содержащиеся в стопке, будут сохранены в соответствии с их типом и номиналом в различных зонах хранения в контейнерах многократного использования. Альтернативно, документы в депонированной стопке могут быть сохранены отдельно, в одной из зон хранения. Автомат может быть запрограммирован с возможностью возврата пользователю документов депонированной стопки позже. Это может быть полезным, например, если пользователь забыл забрать стопку или его внимание было отвлечено при выполнении транзакции.
В большинстве случаев, когда пользователь поместил документы в автомат, он может выбрать вариант кредитования счета на эту сумму. В результате в последовательности транзакции на этапе 338 он должен указать посредством пользовательского интерфейса, что он желает осуществить депозит. Последовательность транзакции переходит на этап 358, на котором автомат устанавливается в режим депозита. После этого депонированная стопка 276 перемещается в зону разборки стопки на этапе 360. Это осуществляется так, как описано выше для помещения стопки документов в автомат.
Как показано схематично на фиг.35, депонированная стопка будет затем разбираться, как описано выше. Однако вместо того, чтобы направлять отделенные от стопки банкноты с помощью отклоняющей заслонки 90 в зону депонирования и в зону доставки/отбраковки, банкноты селективно направляются вниз в другую зону в автомате, как показано на чертеже, к другим зонам хранения в контейнерах повторного использования. В процессе осуществления этой операции каждая из отделенных от стопки банкнот вновь классифицируется и идентифицируется с помощью устройства 88 идентификации банкнот. Идентификация типа банкнот используется для селективного направления каждого документа в зону хранения, где хранятся документы данного типа. Следует иметь в виду, что память, связанная с системой управления автомата, предпочтительно запрограммирована для регистрации типа документа, содержащегося в депонируемой стопке, и для сравнения решения о типе документа, принятого при первоначальном проходе, с решением о типе документа, принятого при втором проходе. В случае ошибки или несовпадения этих решений отклоняющая заслонка 90 может использоваться для направления любых вызывающих сомнения документов в зону 60 доставки/отбраковки вместо перемещения их в зону хранения в автомате или перемещения их в другое выбранное положение хранения.
Как можно видеть для последовательности транзакции, начинающейся этапом 358 на фиг.67, депонированная стопка подвергается процедуре разборки, описанной выше в связи с этапами 184, 196 и 204. Каждая банкнота, следовательно, выравнивается и центрируется относительно канала транспортировки и затем отпускается.
Банкнота подвергается анализу подобно тому, как было описано выше для этапа 278, и если на этапе 280 банкнота идентифицирована надлежащим образом, то последовательность транзакции переходит к этапу 262, на котором автомат переходит в режим депозита. На этапе 262 каждая банкнота направляется в соответствующую ячейку хранения. Банкноты перемещаются посредством центрального механизма транспортировки в направлении стрелок D, показанных на фиг.35. Каждая банкнота затем направляется в соответствующую ячейку хранения на этапе 264. Следует иметь в виду, что банкноты одновременно перемещаются к различным ячейкам хранения при управлении от системы управления. Фиг.35 иллюстрирует пример того, как банкноты помещаются в ячейку 102 хранения. Ясно, что банкноты могут направляться в различные ячейки хранения в ходе процесса размещения вклада.
Банкноты стопки 276 продолжают отделяться от нее до тех пор, пока на этапе 266 не будет определено, что стопка разобрана. Если ни одна из банкнот не отбракована в процессе помещения вклада, то последовательность транзакции может возвратиться затем к основной последовательности транзакции банкомата на этапе 268. Пользователю может быть выдана квитанция, относящаяся к его вкладу, и затем может быть предложено продолжить осуществление других транзакций.
В процессе работы центрального механизма 70 транспортировки имеются позиции, в которых перемещающиеся банкноты необходимо переворачивать в общем случае на 180 градусов. Пример этого показан на фиг.35 секцией 370 механизма транспортировки, которая имеет устройство переворота. В секции 370 механизма транспортировки документы, которые были выровнены в канале транспортировки, реверсируют свое направление, в результате чего они могут быть перемещены рядом с устройством 88 идентификации. Секция 370 транспортировки требует, чтобы банкноты транспортировались установленным образом и чтобы сохранялось расстояние между ними. Документы предпочтительно не должны быть скомканы или деформированы иным образом, так как это может оказать отрицательное влияние на возможность их идентификации в следующей секции. Более детально секция 370 механизма транспортировки показана на фиг.36-38.
Устройство переворота секции 370 механизма транспортировки содержит множество ленточных конвейеров 372. Эти ленточные конвейеры в предпочтительном варианте имеют V-образные ленты, входящие в зацепление с приводными и промежуточными валками 374, 376 и 378. В предпочтительном варианте V-образное поперечное сечение ленточных конвейеров 372 ориентировано радиально внутрь, когда лента проходит через валки 374, 376 и 378.
Когда ленточные конвейеры 372 перемещаются между валками 374 и 376, они опираются на валки 380 кареток. Валки 380 кареток поддерживают ленту таким образом, что V-образное сечение ориентировано в сторону от валков кареток. Плоская верхняя поверхность каждой ленты находится рядом с кольцевым углублением 382 на внешней периферии каждого валка каретки. Валки 380 кареток также смещены один относительно другого. Направляющие 384 имеют несколько меньший диаметр, чем валки кареток, помещенные между ними. Пример направляющей 384 детально показан на фиг.37.
Когда банкнота 386 проходит через секцию 370 механизма транспортировки, она удерживается между плоскими поверхностями ленты 372 и углублениями 382 в валках кареток, как показано на фиг.38. Банкноты перемещаются вокруг валков кареток без перекоса или деформаций. Когда банкноты подходят к зоне рядом с валком 376, выступы 388 на направляющих принудительно выводят их из зацепления с валками кареток и толкают в желательном направлении.
Эта конфигурация используется в предпочтительном варианте осуществления изобретения, так как было обнаружено, что банкноты могут в общем случае транспортироваться через секцию 370 механизма транспортировки без ухудшения их состояния выравнивания и разделения. Возможность поворота пути прохождения банкноты на 180 градусов также значительно сокращает габариты в целом банкомата.
Как показано на фиг. 35, банкноты, которые проходят через центральный механизм 70 транспортировки и которые перемещаются к зонам хранения в автомате, проходят вниз через центральный механизм транспортировки, периферийные сегменты 108, 110, 112 и 114 механизма транспортировки. Эти периферийные сегменты механизма транспортировки в предпочтительном варианте осуществления выровнены по вертикали, так чтобы обеспечивать возможность селективной транспортировки документов между сегментами механизма транспортировки. Эти сегменты также позволяют селективно направлять документы либо через сегменты механизма транспортировки, либо в соседние механизмы транспортировки контейнеров, либо из этих механизмов, каждый из которых расположен рядом с соответствующим сегментом механизма транспортировки. Селективное направление документов достигается путем использования заслонок, связанных с каждым сегментом механизма транспортировки, который работает при управлении от системы управления 30.
Пример сегмента механизма транспортировки, используемого в предпочтительном варианте осуществления изобретения, показан в виде сегмента 110 на фиг. 39. Сегмент 110 механизма транспортировки включает в себя множество разнесенных валков 390, 392, несущих ленточные конвейеры. Валки приводятся в движение приводами, оперативно соединенными с системой управления. Каждый из валков поддерживает ленточный конвейер 394 (см. фиг.44). Внутренняя ветвь 396 каждого ленточного конвейера 394 проходит в основном в первой плоскости и размещена рядом с первой опорной поверхностью 398 для листов и второй опорной поверхность 400 для листов. Каждая из опорных поверхностей имеет множество разнесенных выступов или выемок. Эти выступы служат для прерывания поверхностного натяжения и минимизации риска прилипания документов.
Принципы работы сегмента 110 механизма транспортировки, а также механизма транспортировки контейнера, используемых в предпочтительном варианте осуществления, поясняются с помощью фиг.45 и 46. Механизмы транспортировки обеспечивают при своей работе удержание документов в зацеплении между внешней поверхностью ветви ленточного конвейера и удлиненными выступами, которые проходят к ветви ленточного конвейера от противоположной расположенной рядом опорной поверхности. В примере, показанном на фиг.45, ветви 402 ленточных конвейеров проходят рядом с противоположной опорной поверхностью 404. Выступы 406 проходят поперечно между ветвями ленточного конвейера от опорной поверхности. Документ 408, который захвачен между ветвями ленточных конвейеров и опорной поверхностью, смещается и деформируется выступами 406, чтобы сохранить зацепление с ветвями ленточного конвейера. Это обеспечивает то, что при перемещении ветвей ленточных конвейеров документ 408 аккуратно перемещается, при обеспечении его зацепления с ветвями ленточных конвейеров.
Как показано на фиг.39, выступы 410 проходят от первой опорной поверхности 398. Выступы 410 являются в принципе сегментированными выступами и имеют профилированные передний и задний края, чтобы снизить риск застопоривания документов на них. Промежуточные валки 412 и 416 также взаимосвязаны опорным соединением с элементом, который включает в себя поверхность 398, являющуюся опорной для листов. Промежуточные валки 412 и 416 позиционированы с обеспечением совмещения с внутренними ветвями 396 и выполняют функцию, поясненную ниже.
Каждый периферийный сегмент механизма транспортировки имеет контейнерный механизм транспортировки, расположенный рядом. В случае сегмента 110 механизма транспортировки контейнерный механизм 126 транспортировки проходит рядом с ним, как показано на фиг.1. Контейнерный механизм 126 транспортировки содержит пару разнесенных валков 418, поддерживающих ленточный конвейер, из которых на фиг.39 показан только один. Валки 418 поддерживают ленточные конвейеры 420, нижние ветви 422 которых проходят рядом с опорной плоскостью 424, имеющей выступы, как пояснено выше. Выступы 426 проходят от опорной поверхности 424 между ленточными конвейерами и параллельны ей. Эта конструкция обеспечивает возможность транспортировки документов в зацеплении между выступами 426 и ветвями ленточных конвейеров, как описано выше.
Как показано на фиг.44, валки 418 механизмов транспортировки контейнеров и валки 390 сегментов периферийного механизма транспортировки упорядочены в поперечном направлении подобно тому, как выступы на опорной поверхности позиционированы в поперечном направлении в промежутке между ветвями ленточных конвейеров. Это обеспечивает то, что документы могут перемещаться между сегментами механизма транспортировки контролируемым образом, как описано ниже.
Каждый из сегментов периферийного механизма транспортировки включает в себя заслонку, которая работает селективным образом, направляя документы в требуемых направлениях. Так, сегменту 110 соответствует заслонка 118. Заслонка 118 включает в себя множество подвижных рычагов, которые взаимодействуют для совместного перемещения приводом, связанным с системой управления, и имеют возможность селективного перемещения относительно оси валков 390. Каждый рычаг 428 имеет валок 430, закрепленный на нем подвижным образом. Каждый валок 430, служащий в качестве отклоняющего элемента, совмещен с соответствующей ветвью 396 ленточного конвейера.
Работа сегмента периферийного механизма транспортировки и заслонки поясняется ниже со ссылками на фиг.39-43. Как показано на фиг.39, когда валок 430 отклоняющего элемента заслонки 118 смещается от ветвей 396 ленточных конвейеров, документ 432 имеет возможность проходить в первом направлении прямо через сегмент периферийного механизма транспортировки. Хотя документ 432 показан на фиг.39, как перемещающийся вверх, ясно, что документы могут также перемещаться вниз под действием привода и системы управления, перемещающих валки 390 и 392 в выбранном направлении. Аналогичным образом, документы могут перемещаться вниз и затем вверх в сегменте периферийного механизма транспортировки.
На фиг. 40 показано, как документ 434 перемещается в направлении вниз, когда валок 430 заслонки 118 выдвигается. В этом состоянии документ 434 направляется к зоне контакта, создаваемой ветвями 422 ленточных конвейеров и выступами 426 контейнерного механизма 126 транспортировки. В результате перемещение ветвей 420 ленточного конвейера, как показано на чертеже, когда задействуется заслонка, переводит документ в транспортную линию контейнера, по которой он переносится контейнерным механизмом транспортировки. Как можно видеть из фиг.40, когда заслонка 118 приводится в действие, ветвь 396 ленточного конвейера деформируется. Промежуточный валок 416 поддерживает ветвь ленточного конвейера в деформированном положении для предотвращения излишнего износа под действием трения.
На фиг.41 показан документ 436, перемещаемый от контейнерного механизма транспортировки к сегменту периферийного механизма транспортировки. В показанном положении заслонка 118 направляет документ 436 к сегменту 108 периферийного механизма транспортировки, расположенному над секцией 110 периферийного механизма транспортировки (см. фиг.35), и к центральному механизму транспортировки.
На фиг.42 показана заслонка 118 в положении, при котором она направляет документ 438 от механизма 126 транспортировки контейнеров вниз к сегменту 110 периферийного механизма транспортировки. Как следует из предшествующего описания, предпочтительный вариант осуществления изобретения обеспечивает перемещение документов от одной зоны хранения к другой. Эта функция обеспечивается системой управления автомата, перемещающей документы из зон хранения в контейнерах, где они хранились, в зоны хранения в контейнерах либо выше, либо ниже контейнера хранения в автомате.
На фиг. 43 показан документ 440, перемещающийся вверх в сегменте периферийного механизма транспортировки и направляемый заслонкой 118 к контейнерному механизму 126 транспортировки. Возможность перемещать документы так, как показано на фиг.39-43, значительно облегчает выполнение функций хранения и извлечения документов в предпочтительном варианте осуществления изобретения. Как очевидно из предшествующих чертежей, механизмы заслонок могут использоваться для селективной ориентации документов. Это может быть желательным, особенно если необходимо предоставить пользователю документы, ориентированные одинаковым образом в стопке. Это может быть реализовано путем изменения ориентации документов перед их сохранением с использованием данных об ориентации каждого документа, полученных устройством 88 идентификации. Однако, как указано выше, в рассматриваемом варианте осуществления изобретения не требуется, чтобы документы были ориентированы каким-то определенным образом для обеспечения удовлетворительной работы устройства.
Хранение документов в ячейках хранения описано ниже со ссылками на фиг. 47-53. В целях иллюстрации будет рассмотрено хранение документов в зоне хранения 102, как показано на фиг.35. Однако ясно, что последующее описание применимо к хранению документов в любой из зон хранения, имеющихся в автомате в предпочтительном варианте его осуществления.
На фиг. 47 зона хранения 102 показана сверху. Ветви 422 ленточных конвейеров контейнерного механизма 126 транспортировки проходят по транспортной линии над дверцей 442 секции. Дверца 442 секции подвижно закреплена в соединении с контейнером выше зоны хранения 102. Дверца 442 отсека содержит опорную поверхность 444, которая поддерживает банкноты или иные документы, перемещающиеся на ней к соседним зонам хранения или от них. Опорная поверхность 444 содержит выступы, служащие для уменьшения поверхностного натяжения и прилипания документов, перемещающихся на ней.
Дверца 442 отсека имеет проходящие вовне выступы 446, которые вступают в зацепление с проходящими документами и удерживают документы в зацеплении с ленточными конвейерами 422. Пара отверстий 448 совмещена с выступами 446. Отверстия 448 обеспечивают доступ для ударных роликов, которые будут рассмотрены ниже. Как можно видеть из фиг.47, выступы 446 скошены по соседству с отверстиями 448 для минимизации риска прилипания к ним передаваемых документов. Дверца 442 секции также содержит множество промежуточных валков 450. Валки 450 позиционированы так, чтобы обеспечивалось их совпадение с ленточными конвейерами 422. Валки 450 входят в зацепление с ленточньми конвейерами и облегчают перемещение ленточных конвейеров, когда дверца 442 секции открыта, для получения доступа к документу, как будет пояснено ниже.
Дверца 442 секции также имеет центральное отверстие 452. Отверстие 452 имеет такие размеры, что в него могут входить два расположенных рядом ударных ролика 454. Центральные ударные ролики 454 сходны по конструкции с внешними ударными роликами 456, которые выступают через отверстие 448. Центральное отверстие 452 также выполнено с размерами, обеспечивающими вхождение лентопротяжных роликов 458 и 460, которые позиционированы спереди от дверцы 442 секции, закрывающей зону 102 хранения. Лентопротяжные ролики 458 и 460 соединены с ударными роликами 454 посредством конвейерной ленты 462, служащей питателем.
Ясно, что ударные ролики 454 и 456, а также лентопротяжные ролики 458 и 460 поддерживаются на поверхности, расположенной рядом с дверцей 442 секции и по вертикали над ней. Ударные ролики и лентопротяжные ролики предпочтительно имеют опору на корпусе автомата, в то время как зона 102 хранения и дверца 442 секции поддерживаются на контейнере 94 повторного использования. Контейнер повторного использования может быть вынут из автомата, когда ударные ролики и лентопротяжные ролики установлены так, что они не выступают через отверстие 452.
Дверца 442 секции также включает в себя датчик 464. Датчик 464 представляет собой оптический приемник, который принимает сигналы от оптического излучателя, размещенного в автомате по соседству и над датчиком 464, когда контейнер 94 находится в своем рабочем положении. Датчик 464 соединен со схемами управления автомата.
Этапы, связанные с сохранением банкноты в зоне 102 хранения, описаны ниже со ссылками на фиг.48-53. Зона 102 хранения содержит стопку 466, включающую в себя множество листов, банкнот или иных документов. Стопка 466 предпочтительно представляет собой множество горизонтально ориентированных документов, которые поддерживаются на отжимающей пластине 468. Отжимающая пластина 468 смещена вверх в направлении к дверце секции с помощью пружины 467 или иного механизма. Стопка удерживается на своем верхнем конце множеством поперечно разнесенных передних пальцев 470 и задних пальцев 472. Передние пальцы и задние пальцы выполнены перемещаемыми, как будет пояснено ниже.
Дверца 442 секции имеет внутреннюю поверхность 474, которая имеет множество ориентированных вниз выступов с выемками между ними. В местах расположения пальцев 470 и 472 обращенные внутрь выступы 476, 478, расположенные рядом верхние концы пальцев 470 и 472 проходят над стопкой и имеют возможность перемещения в выемки внутренней поверхности дверцы секции. Эти обращенные внутрь выступы 476 и 478 пальцев 470 и 472 удерживают верх стопки, фиксируя ее в положении, показанном на фиг.48.
На фиг. 48 документ 480 показан в процессе его перемещения к зоне хранения 402. В этом положении перед приходом документа лентопротяжные ролики и ударные валки позиционированы выше опорной поверхности 444 дверцы секции. Отводные ролики 482, которые установлены с возможностью перемещения на контейнере 94, имеющем зону 102 хранения, перемещаются в положение, смещенное относительно лентопротяжных роликов 458 и 460.
После прихода документа 480 в зону 102 хранения дверца 442 секции поднимается на переднем участке рядом с его передней поверхностью. Отводные ролики 482 перемещаются вверх, в то время как лентопротяжные ролики 458 и 460 захватывают документ и перемещают его в зону 102 хранения. Пальцы 470 и 472 перемещают верхнюю поверхность стопки вниз, противодействуя усилию смещения, приложенному вверх отжимающей пластиной 468. Это позволяет документу 480 перемещаться в зону 102 хранения над ориентированными внутрь выступами пальцев.
На фиг. 50 показана конфигурация лентопротяжных роликов и отводных валков, когда документ 480 перемещен в зону хранения. В этом положении вращающиеся лентопротяжные валки 458 и 460 захватывают документ 480, что делают и отводные ролики 482, так что документ может перемещаться в зону хранения. Как показано на фиг.50, валок 484, снимающий верхний лист, работа которого пояснена ниже, сохраняет свое положение со смещением относительно ленточного конвейера 462, когда документ 480 входит в зону хранения.
Как показано на фиг. 51, документ 480 входит в зону 102 хранения над стопкой 466. Пальцы 470 и 472 затем перемещаются вовне, как показано на фиг. 51.
Как показано на фиг.52, в конечном счете пальцы 470 и 472 перемещаются вовне на достаточное расстояние, чтобы высвободить стопку 466, в результате чего она перемещается вверх под воздействием смещающего усилия со стороны отжимной пластины 468. В результате этого документ 480 вводится в стопку, когда дверца 442 секции перемещается вниз в свое исходное положение. Когда дверца секции перемещается вниз, обращенные внутрь выступы пальцев 472 и 470 совмещаются с выемками на внутренней стороне дверцы секции.
Из положений, показанных на фиг.52, пальцы 470 и 472 перемещаются внутрь для повторного захвата верхней поверхности стопки, которая теперь включает в себя документ 480. Отводные ролики 482 вновь втягиваются вниз, и зона 102 хранения готова для приема следующего документа для хранения в ней.
Из вышеприведенного описания очевидно, что дополнительно к показанным и описанным механизмам для перемещения пальцев, дверцы секции, валков, соответствующих изобретению, используются соответствующие механизмы. Эти механизмы могут содержать обычные двигатели и иные механизмы и тяги, пригодные для приведения в движение компонентов, как описано выше. Такие общеизвестные компоненты не показаны, чтобы не загромождать описание сущности изобретения несущественными деталями.
Следует иметь в виду, что если один или несколько документов направляются в зону хранения в автомате, то в зоне хранения, куда должен быть помещен на хранение конкретный документ, производится описанная последовательность этапов. Хотя последовательность операций для зоны хранения описана как прием документов и затем введение их в стопку в зоне хранения по одному документу в каждый данный момент времени, следует иметь в виду, что механизмы в зоне хранения могут быть оптимальным образом выполнены так, что множество документов могут быть собраны в зоне хранения над пальцами, и затем пальцы и дверца секции могут быть перемещены так, чтобы ввести множество документов в стопку. Такая конфигурация может быть использована для оптимизации скорости работы электронного банковского автомата. Кроме того, следует иметь в виду, что механизм для хранения документов в зоне хранения приведен в качестве примера, и другие механизмы для сохранения документов могут быть использованы в альтернативных вариантах использования изобретения.
Работа автомата 10 ниже описывается для транзакции, при которой документы извлекаются из зон хранения в автомате и выдаются пользователю или другому оператору банковского автомата. Это схематично представлено на фиг. 54. В операции выдачи документы будут удаляться из множества зон хранения и перемещаться одновременно под контролем системы управления 30 к зоне 66 депонирования. Как схематично показано на фиг.54, каждый из документов, извлеченных из зон хранения, перемещается от соответствующего контейнерного механизма транспортировки к расположенному рядом сегменту периферийного механизма транспортировки и направляются вверх с помощью заслонки к центральному механизму транспортировки. В центральном механизме транспортировки каждый из документов проходит через устройство 88 идентификации. Тип и характер документов вновь проверяются перед выдачей их пользователю. Поток документов в процессе такой выдачи представлен стрелками Е на фиг.54. Разумеется, как можно понять из предыдущего описания, если в процессе обработки документов, которые должны выдаваться пользователю, будет обнаружен недействительный или неидентифицируемый документ, то он может быть направлен в зону 60 доставки/отбраковки для повторной обработки или возврата в автомат.
Извлечение документов из зоны хранения представлено последовательностью операций, показанных на фиг.55-61 в связи с зоной 102 хранения. В целях наглядности и простоты рассматривается случай, когда документ 480, который ранее был помещен сверху стопки 466, должен быть выдан в этой приведенной для примера последовательности операций.
Как показано на фиг. 55, в первоначальном положении зоны 102 хранения дверца 442 секции смещена вниз с помощью связанного с ней механизма. Обращенные внутрь выступы пальцев 470 и 472 находятся в выемках на внутренней поверхности 474 дверцы секции. Пальцы вместе с внутренней поверхностью дверцы секции остаются наверху стопки, которая ограничена сверху документом 480. Стопка 466 смещается вверх действием пружины отжимной пластины 468.
На следующем этапе при выдаче документа пальцы 470 и 472 перемещаются вовне относительно стопки. Это обеспечивает захват документа 480 на верхней поверхности стопки 466 выступами, которые ограничивают внутреннюю поверхность 474 дверцы 442 секции.
Как затем показано на фиг.57, передняя часть дверцы 442 перемещается вверх с помощью ее механизма. Отводные валки 482 перемещаются вверх для зацепления с лентопротяжными роликами 458 и 460 (см. фиг.59). Аналогичным образом ролик 484 отделения верхнего листа перемещается вверх для зацепления с ленточным конвейером 462.
Следует отметить в связи с фиг.59, что лентопротяжный ролик 460 имеет внутреннюю часть, которая имеет высокофрикционный сегмент 486, который содержит ленту упругого материала, проходящую частично по окружности относительно внутренней части ролика. Лентопротяжный ролик 458 имеет такой же высокофрикционный сегмент 488. Высокофрикционные сегменты обеспечивают захват верхнего документа в стопке, когда лентопротяжные ролики позиционированы так, что высокофрикционные сегменты обеспечивают зацепление с верхним документом.
Следует иметь в виду, что валок 484 отделения верхнего листа содержит механизм типа односторонней муфты. Механизм односторонней муфты обеспечивает вращение валка для отделения верхнего листа таким способом, который позволяет документу легко перемещаться в зону 102 хранения. Муфта, связанная с валком 484 отделения верхнего листа, ориентирована так, чтобы противодействовать перемещению документов из зоны хранения. Таким образом, валок 484 в принципе перемещает только один документ на самом верху стопки и не позволяет остальным документам перемещаться из зоны хранения. Это достигается тем, что высокофрикционные сегменты обеспечивают большее усилие перемещения одного документа вовне, чем сопротивление, прикладываемое валком отделения верхнего документа.
Как показано на фиг.57 и 59, ударные ролики 454 и 456 содержат проходящую вовне часть. Эти проходящие вовне части предпочтительно выровнены так, что все выступающие части проходят через соответствующие отверстия в дверце секции одновременно. Как показано на фиг.59, эти выступающие части в принципе совмещены по углу с высокофрикционными сегментами на лентопротяжных роликах
Как показано на фиг.58, для захвата документа лентопротяжные ролики и ударные ролики вращаются так, что радиально выступающие вовне части ударных роликов и высокофрикционные сегменты лентопротяжных валков захватывают документ 480 наверху стопки 466. Действие ударных роликов, лентопротяжных роликов, отводимых валков и ролика отделения верхнего документа приводит к тому, что документ 480 отделяется от стопки и перемещается вовне из зоны хранения, как показано на фиг.58. Предпочтительный вариант осуществления устройства спроектирован таким образом, что один поворот лентопротяжных роликов, ударных роликов достаточен для удаления документа из зоны хранения. Как только документ удален из зоны хранения, дверца 442 секции вновь закрывается, и отводные ролики и ролик отделения верхнего документа перемещаются для отведения их от контейнера. Пальцы 470 и 472 перемещаются вверх и внутрь, чтобы вновь зафиксировать верх стопки.
Когда документ 480 перемещается из зоны 102 хранения, то фиксируется прохождение света через документ. Прохождение света через документ фиксируется датчиком 490, который аналогичен датчику 464 и размещен на дверце секции или иной структуре, накрывающей зону хранения, или иным образом в первом направлении от зоны 102 хранения. Излучатель 492, установленный в автомате, излучает световой сигнал достаточного уровня, так что можно определить, когда имело место отделение от стопки сдвоенных документов.
Излучатель 492 и датчик 490 соединены с системой управления, которая запрограммирована для обеспечения распознавания случаев отделения от стопки сдвоенных документов. Автомат может работать различными способами для обработки данной процедуры. Если документ отделен полностью от стопки, то документ может быть реверсирован по направлению и направлен назад в стопку. Затем вновь делается попытка его отделения от стопки. Альтернативно, во второй попытке захвата лентопротяжные ролики могут выполнять колебательные перемещения взад-вперед при захвате банкноты, чтобы минимизировать возможность отделения двух документов вместе. Это может осуществляться автоматически в некоторых условиях, когда известно, что документы имеют особенно высокую степень сходства или значительное поверхностное натяжение, что затрудняет их отделение.
Наконец, в случае, если повторные попытки отделения отдельной банкноты из зоны хранения безуспешны, то автомат может обеспечить направление захваченных документов в другую зону хранения или в зону 132 сброса. Автомат может затем осуществлять захват следующей банкноты из стопки. Программирование автомата 10 предпочтительно обеспечивает минимизацию задержки, связанной с возникающей проблемой отделения банкнот.
После того как документ 480 успешно удален из зоны 102 хранения, он транспортируется к сегменту 110 периферийного механизма транспортировки и направляется заслонкой 118 к центральному механизму транспортировки. Документ 480 вместе с другими документами проходит через идентификационное устройство 88, которое подтверждает идентичность каждого документа. Документы помещаются в зону 66 депонирования, где накапливается депонированная стопка 494 документов. После этого, как схематично представлено на фиг.62, депонированная стопка 494 перемещается вверх в зоне 50 ввода/вывода автомата. Заслонка 54 открывается, и стопка доставляется пользователю через отверстие 52.
Последовательность транзакции, исполняемая системой управления для осуществления операций автомата в процессе транзакции снятия, представлена на фиг. 69 и 70. Как и в случае транзакции вклада, автомат сначала реализует последовательность идентификации пользователя, представленную этапом 134, на котором пользователь, работающий с автоматом, идентифицируется. Эта последовательность идентификации пользователя обычно не выполняется вновь, если пользователь работал с автоматом для осуществления транзакции непосредственно перед данной транзакцией, так как данные счета пользователя уже определены и имеются в памяти автомата. После того как пользователь идентифицирован, автомат переходит к основной последовательности 136 транзакции банкомата, как описано выше.
Затем на этапе 496 пользователь указывает с помощью пользовательского интерфейса, желательно ли для него проведение транзакции снятия. Сумма снимаемых средств принимается автоматом на основе данных, введенных пользователем на этапе 498. На этапе 500 автомат определяет, авторизована ли сумма снятия, запрошенная пользователем, посредством программирования автомата и/или программирования компьютера, который осуществляет обмен данными с автоматом. Если снятие не авторизовано, то автомат возвращается к основной последовательности транзакции и выдает инструкции пользователю.
Если сумма снятия авторизована, то система управления автомата проверяет ячейки хранения банкнот разного номинала на этапе 502 и определяет на этапе 504 совокупность банкнот, которые должны быть выданы пользователю. Следует отметить, что в некоторых вариантах осуществления изобретения, которые предназначаются для использования главным образом коммерческими пользователями, может быть предусмотрена возможность выбора пользователем совокупности банкнот разных номиналов, которые пользователю желательно получить. Это делается системой управления с использованием запрограммированных подсказок, которые отображаются на пользовательском интерфейсе. Пользователь осуществляет ввод данных посредством пользовательского интерфейса, указывая количество банкнот каждого типа, которые ему желательно получить. Если, однако, банкомат не предусматривает такой возможности или пользователь не осуществляет выбор конкретных номиналов, то автомат будет определять количество банкнот каждого имеющегося типа и выдавать их пользователю таким образом, чтобы минимизировать вероятность того, что банкноты какого-либо из номиналов будут при этом израсходованы.
Затем автомат переходит к этапу 506, на котором система управления изымает банкноты из различных зон хранения. Как показано этапом 508, изображенным пунктиром, в предпочтительном варианте осуществления операции изъятия выполняются одновременно. Множество банкнот может быть изъято из различных ячеек хранения и перемещено в виде потока отдельных банкнот через сегменты периферийного механизма транспортировки в центральный механизм транспортировки автомата.
Для каждой операции изъятия после изъятия банкноты выполняется этап 510 для определения того, не были ли изъяты из ячейки хранения сдвоенные банкноты. Если наличие сдвоенных банкнот определено на этапе 512, то на этапе 514 они возвращаются назад, и делается новая попытка изъятия одной банкноты. Если на этапе 512 было определено наличие одной банкноты, то банкнота на этапе 516 отпускается. Причем на этапе 516 банкнота отпускается координированно с другими банкнотами, что обеспечивается системой управления для того, чтобы каждая банкнота попадала в центральный механизм транспортировки автомата с определенным промежутком относительно других банкнот. Однако этот промежуток таков, что банкноты перемещаются одновременно и доставляются в зону депонирования с высокой скоростью.
Анализ каждой проходящей банкноты осуществляется устройством 88 идентификации, что указано на этапе 518. Если банкнота распознана на этапе 520 как действительная, то она направляется в зону 66 депонирования на этапе 522. Если банкнота не распознана на этапе 522 или определена как недействительная, то она направляется в зону 60 доставки/отбраковки на этапе 524 или в другую зону, определенную при программировании автомата. Неуспех в идентификации банкноты, изъятой из ячейки хранения, является чрезвычайным событием. Это объясняется тем, что каждая сохраненная банкнота обычно дважды идентифицируется перед этим. Проблемы могут иметь место, если банкнота была загружена в контейнер извне. Если банкнота отбракована, то последовательность транзакции в описываемом варианте осуществления переходит к этапу 526 восстановления после ошибки. Такая программа восстановления после ошибки может предусматривать направление банкноты через центральный механизм транспортировки в назначенную ячейку хранения для последующего анализа.
Банкноты доставляются в зону депонирования до тех пор, пока не будут доставлены все банкноты, соответствующие запросу снятия, введенному пользователем. Полнота доставки проверяется на этапе 528. Затем делается проверка на этапе 530, чтобы определить, все ли доставленные банкноты корректным образом идентифицированы. Если нет и имеются банкноты, направленные в зону отбраковки, то выполняется этап 526 восстановления после ошибки.
Если, однако, все банкноты были надлежащим образом идентифицированы, то депонированная стопка, соответствующая стопке 494 на фиг.62, перемещается в зону доставки на этапе 532, на котором происходит совмещение зоны депонирования с отверстием в корпусе. Затем внутренняя заслонка закрывается на этапе 534. Передняя заслонка открывается на этапе 536, и ленточные конвейеры на этапе 538 приводятся в движение для доставки пользователю банкнот.
На этапе 540 на основе данных, считанных с датчиков 148 и 150, определяется, забрал ли пользователь стопку банкнот. Если это так, то на этапе 542 передняя заслонка закрывается. Последовательность транзакции затем возвращается к основной последовательности транзакции банкомата на этапе 544.
Если, однако, банкноты не были взяты пользователем, то может выполняться подпрограмма, предлагающая пользователю с помощью подсказок на пользовательском интерфейсе забрать банкноты. Однако если пользователь не забрал банкноты, то выполняется этап 546 для возвращения банкнот назад в автомат. Передняя заслонка закрывается на этапе 548, и автомат затем переходит к программе восстановления после ошибки. Она может включать, например, сохранение банкнот в конкретной ячейке хранения. Альтернативно она может предусматривать реверсирование транзакции снятия, запрошенной пользователем, и поместить банкноты назад в различные зоны хранения путем пересылки их через центральный механизм транспортировки.
Преимуществом предпочтительного варианта осуществления изобретения является возможность работы с высокими скоростями. Это достигается за счет архитектуры системы 30 управления, которая схематично представлена на фиг.63. Предпочтительный вариант осуществления системы использует систему управления, включающую в себя процессор 548 терминала. Процессор терминала содержит основные средства программирования автомата, а также программы, необходимые для реализации функций информационного обмена с другими системами и других функций, отличных от выполняемых автоматом. Как показано на фиг.63, процессор 548 терминала оперативно связан с памятью данных, которая включает в себя программируемые команды и данные. Процессор 548 терминала связан каналами связи через соответствующие интерфейсы с различными устройствами 550, входящими в состав аппаратных средств.
Процессор 548 терминала также оперативно связан с процессором 552 модулей. Процессор 552 модулей управляет операциями, выполняемыми множеством контроллеров 554, 556, 558, 560, 562 и 564 модулей. Как показано на чертеже, процессор 552 модулей также оперативно соединен со своей собственной памятью данных, в которой хранятся его запрограммированные команды и данные. Аналогичным образом, каждый из контроллеров модулей предпочтительно включает в себя блоки памяти для хранения различных запрограммированных команд и данных. Процессор 552 модулей оперативно соединен с каждым из контроллеров модулей посредством шины 566 данных. Контроллеры модулей связаны посредством шины данных только с процессором 552 модулей, а процессор модулей непосредственно связан с каждым контроллером модуля. Каждый контроллер модуля имеет связанные с ним аппаратные средства 567. Каждый контроллер модуля имеет связанные с ним аппаратные средства соответствующих типов, по отношению к которым он осуществляет управление и контроль. В некоторых вариантах осуществления каждый контроллер модуля включает в себя один процессор, определяемый здесь как процессор контроллера модуля. В других вариантах контроллер модуля может включать в себя множество процессоров. Аналогичным образом, множество процессоров могут использоваться в других вариантах осуществления для процессора терминала и/или для процессора модулей.
В процессе работы системы каждый контроллер модуля реализует программы для исполнения конкретных задач каждого из устройств аппаратного обеспечения, связанных с ним. Это может представлять собой, например, конкретную функцию, связанную с перемещением механизма или документа. Эти задачи координируются с другими задачами, выполняемыми с помощью контроллера модуля, связанного с соответствующими аппаратными средствами. Одновременное перемещение документов координируется процессором 552 модулей, посылающим сигналы управления к различным контроллерам модулей, так чтобы функции манипулирования документами выполнялись синхронизированным и координированным образом. Процессор 548 терминала управляет работой процессора модулей для выполнения конкретных транзакций, которые указываются при программировании терминала. В результате такой конфигурации документы могут обрабатываться одновременно и независимо проходить через автомат, что в значительной степени повышает скорость операций сортировки и извлечения документов.
Процессор 548 выполняет программы, сохраненные в связанной с ним памяти, которая позволяет банкомату 10 осуществлять связь с внешними устройствами и системами. К ним относятся хост-компьютеры, используемые банком или иной финансовой организацией, использующей банкоматы. Процессор терминала также осуществляет связь с датчиками и другими устройствами в банкомате, которые обеспечивают интерфейс для пользователя автомата. К ним относятся, например, дисплей 16, устройства ввода, такие как клавиатура 18, и устройство 20 считывания с карточек. Процессор терминала также осуществляет информационный обмен и управляет работой устройств, таких как принтеры, депозитарии, которые являются составными частями автомата 10.
В предпочтительном варианте осуществления процессор 548 терминала также осуществляет информационный обмен с устройством 88 идентификации, которое определяет тип и номинал документов при их прохождении в автомате. Память, связанная с процессором терминала, включает информацию, которая коррелирует информацию, определяемую устройством идентификации, с конкретными типами документов. Устройство идентификации, используемое в предпочтительном варианте осуществления изобретения, представляет собой устройство проверки достоверности валюты и детектирования подделки (ПДВДП), которое определяет, что данные, воспринимаемые при проходе банкноты, соответствуют одному из множества шаблонов, сохраненных в памяти, причем каждый из шаблонов отражает данные, которые, как ожидается, будут приниматься от банкноты определенного типа и номинала, имеющей определенную ориентацию. Память процессора терминала включает в себя информацию, которая запускает процессор терминала на основе использования шаблона, соответствующего документу или банкноте, типу банкноты, ее номиналу и ориентации. Процессор терминала также поддерживает регистрацию в его памяти ячеек памяти или номеров секций, где хранятся документы или банкноты каждого типа.
Если пользователь задействует автомат 10, процессор 548 терминала работает в соответствии с его программой, чтобы процессор модулей и процессор терминала могли выполнять необходимые команды, требуемые при осуществлении транзакций. В случае транзакции депозита, выполняемой в ответ на ввод данных пользователем, процессор терминала определяет зоны хранения в контейнерах, где должны храниться документы каждого типа. Процессор терминала затем выдает команды процессору модулей выполнять действия, связанные с сохранением в памяти и выдачей сообщения об их завершении. Процессор модулей обрабатывает команды от процессора терминала для перемещения вкладываемых средств в ячейки хранения в соответствии с инструкциями, которые включают сигналы от процессора терминала. Аналогичным образом, в случае транзакции выдачи, которая также выполняется в ответ на ввод данных пользователем, процессор терминала передает процессору модулей сообщения, которые указывают, какое количество документов должно быть выдано из конкретных зон хранения. Процессор модулей принимает эти сообщения и перемещает указанные средства в желательные местоположения.
Как можно видеть из вышеописанного, сообщения, которые процессор терминала передает к процессору модулей, представляют в принципе общие команды, относящиеся к банкнотам, листам или иным документам или средствам, перемещаемым в автомате. Детальные команды для управления устройствами и отслеживания перемещаемых средств, чтобы гарантировать одновременное их надлежащее перемещение, выполняются при управлении от процессоров модулей и контроллеров модулей.
Контроллеры модулей связаны с конкретными устройствами или комбинациями устройств в системе. Контроллеры модулей в принципе выполняют относительно простые ограниченные подпрограммы, которые сохранены в связанных с ними блоках памяти. Программы, выполняемые посредством контроллеров модулей, обычно называются задачами. Задачи представляют собой программы, основанные на логических состояниях (конечных автоматах), которые обеспечивают начало выполнения или управление другими задачами с помощью сигналов, принятых от процессора модулей, а также от датчиков, устройств или от других задач.
Каждый контроллер модуля в предпочтительном варианте связан с группой физических устройств. В предпочтительном варианте осуществления контроллер модуля связан с устройством ПДВДП для управления работой соответствующих его устройств выборки и датчиков. Контроллер модуля, связанный с устройством ПДВДП, выполняет задачи, которые активизируют излучатели и приемники для формирования данных выборок. Контроллер модуля для устройства ПДВДП также обеспечивает сигналы, связанные с обнаружением передних и задних краев банкноты. Он также вычисляет угол скоса документа при его прохождении через устройство ПДВДП. Сигналы и информация, получаемые контроллером модуля, связанным с устройством ПДВДП, передаются к процессору модулей.
Устройства, которые перемещают документы через функциональные средства ввода/вывода 32 и средства разборки стопки, устранения перекоса и выравнивания 34, 36, 38, управляются единым контроллером модулей в предпочтительном варианте осуществления. Соответствующие функции и устройства, связанные с ними, определяются здесь как центральный механизм транспортировки. Контроллер модулей, связанный с центральным механизмом транспортировки, выполняет задачи, необходимые для перемещения документов через центральный механизм транспортировки, как поясняется ниже. Контроллер модулей также связан с каждым контейнером для рециклирования валюты и механизмами в автомате, которые удаляют и размещают документы в зонах секций в контейнерах. Контроллер модулей, связанный с каждым контейнером, также управляет контейнерным механизмом транспортировки, связанным с механизмом транспортировки, а также сегментами периферийного механизма транспортировки и заслонками для направления перемещаемых средств, связанными с механизмом транспортировки. Устройства, которые обеспечивают выполнение этих функций, называются мультимедийными устройствами рециклирования (МУР). Ясно, что каждый контейнер в автомате связан с отдельным МУР и каждый работает при управлении от отдельного контроллера модуля.
В то время как процессор терминала выполняет функции высокого уровня, связанные с рециклированием валюты, а контроллеры модулей выполняют функции самого низкого уровня, процессор модулей выполняет принципиально важные функции, которые обеспечивают координированную работу всех средств. Процессор модулей является системой объектно-ориентированного программного обеспечения. Процессор модулей обеспечивает управление потоком средств между центральным механизмом транспортировки и МУР. Процессор модулей осуществляет это в ответ на команды выдачи и помещения средств, которые включают в себя сигналы, получаемые от процессора терминала. Процессор модулей также обеспечивает устанавливаемые по заказу пороги и функции для операций помещения, отбраковки и отклонения. Процессор модулей также обеспечивает обработку информации, которую он принимает от контроллеров модулей, которые связаны с каждым МУР, с каждым устройством ПДВДП и центральным механизмом транспортировки.
Процессор модулей также выполняет функцию регистрации данных в системе. Регистрация ведется по отношению к обмену данными между процессором терминала и процессором модулей, а также между процессором модулей и контролером модуля. Процессор модулей также поддерживает регистрацию внутренних проверок или отказов программного обеспечения. Регистрация внешних проверок или отказов программного обеспечения также поддерживается процессором модулей в связанной с ним памяти. Процессор модулей также поддерживает виртуальное представление системы и средств в ней. Это включает в себя виртуальное представление порядка и размещения всех элементов, которые обрабатывают средства, перемещаемые в автомате. Кроме того, процессор модулей поддерживает информацию, относящуюся к количеству документов, сохраняемых в различных местоположениях, и информацию идентификации, которая соответствует различным хранящимся документам. Процессор модулей также обеспечивает обнаружение смятых листов и других проблем и восстановление после такого обнаружения. Процессор модулей обнаруживает передние и задние края документов, которые перемещаются в системе. Он также проверяет события по времени, источнику, порядку и достоверности, как пояснено ниже.
Процессор модулей управляет контроллерами модулей для выполнения восстановления после сбоев и при необходимости перепрограммирует контроллеры модулей. Процессор модулей осуществляет поиск данных из журналов регистрации, поддерживаемых в контроллерах модулей, и сохраняет информацию в связанной с ним энергонезависимой памяти. Процессор модулей также обеспечивает обнаружение неисправностей контроллера модуля и сброс временных меток контроллера модуля, если это необходимо.
Процессор модулей осуществляет связь с процессором терминала и выполняет все действия, необходимые для выполнения команд процессора терминала. Процессор модулей обеспечивает завершение всех операций, связанных с текущей транзакцией, перед началом выполнения запроса новой транзакции с процессора терминала. Например, после того как набор документов успешно доставлен пользователю или принят от пользователя, процессор модулей должен выполнять другие операции, такие как перенос данных регистрации от контролеров модулей, прежде чем может начаться выполнение следующей транзакции. Процессор модулей работает в соответствии с его программированием, чтобы гарантировать выполнение этих функций.
Процессор модулей также обеспечивает координацию перемещения документов между устройствами автомата, управляемыми различными контроллерами модулей. Это включает перемещение документов от центрального механизма транспортировки к сегментам периферийного механизма транспортировки, связанным с МУР, и наоборот. Процессор модулей также обеспечивает системный тактовый генератор для управления координированным перемещением документов через различные устройства и обеспечивает необходимые связи между процессором модулей и процессором терминала, а также от процессора модулей к контроллерам модулей. Как будет показано, в предпочтительной форме выполнения системы контроллеры модулей осуществляют связь только с процессором модулей, но не с другими контроллерами модулей или процессором терминала. Аналогичным образом, процессор терминала осуществляет связь только с процессором модулей. Этот подход гарантирует, что передачи данных будут эффективно маршрутизироваться, и система будет обрабатывать документы с высоким быстродействием и эффективностью.
В соответствии с архитектурой процессора модулей, используемой в предпочтительном варианте осуществления изобретения, процессор модулей управляет перемещением каждой банкноты, каждого документа или иного средства в системе, без учета предшествующего или последующего элемента таких средств. При этом операции системы обеспечивают управление и отслеживание перемещения каждого элемента перемещаемых средств для достижения требуемой маршрутизации в пределах определенных параметров. Процессор модулей выполняет перемещение средств путем их перемещения через определенные местоположения. Эти местоположения служат зонами удержания документов для удержания одного или нескольких документов на краткосрочной основе, как в случае зоны депонирования, или на долговременной основе, как в случае зон хранения в контейнерах повторного использования. Местоположения определяются как пункты управления или пункты восприятия. Пункт управления представляет собой элемент, в котором имеет место некоторое физическое действие. Пункт восприятия представляет собой элемент, дающий некоторую информацию о местоположении документа в системе. Пункты управления направляют средства в их место назначения, в то время как пункты восприятия перемещают средства в направлении их места назначения. Заслонка представляет собой пример пункта управления, а датчик - пример пункта восприятия. В целях данного описания все устройства, которые предназначены для перемещения или направления документов, называются устройствами манипулирования документами.
В предпочтительном варианте осуществления каждый пункт управления и каждый пункт восприятия в механизме рециклирования имеют очередь сохранения. Очередь сохранения показывает порядок, в котором документы проходят конкретный пункт. Очередь сохранения упорядочена по принципу обслуживания в порядке прихода всех документов, которые должны передаваться через данный пункт. Очереди сохранения должны иметь корректный порядок для правильной работы. Система обеспечивает целостность установленного порядка путем тщательного контроля за перемещениями документов в пределах вычисленных ограничений по времени.
В каждом пункте управления вдоль пути, по которому следует документ, известно, в каком состоянии он должен быть, чтобы направить документ далее корректным образом. Например, заслонка может иметь состояние "внутрь", в котором документ направляется в соответствующий контейнерный механизм транспортировки или из него, или состояние "через", в котором документ проходит прямо через сегмент периферийного механизма транспортировки. Как только документ прошел через пункт управления, пункт управления запрашивает прохождение следующего документа и изменяет состояние с учетом этого. В целом, если пункт восприятия связан с пунктом управления, то он передает событие восприятия в пункт управления. После этого именно пункт управления принимает на себя ответственность за принятие решения о том, что предпринимать дальше и когда осуществлять это. Пункт восприятия обычно соответствует обнаружению переднего или заднего края документа. Таким образом, в каждом пункте управления имеются сведения о том, что необходимо сделать и когда это нужно сделать, чтобы направить следующий документ по соответствующему пути в его место назначения, и эти сведения приобретаются с помощью очереди сохранения.
Архитектура процессора модулей позволяет каждому объекту осуществлять связь с любым другим объектом. Передаваемые при этом сообщения образуют события, которые приводят в действие систему. События включают события документа и пунктов отображения, например передний край, задний край документа, выданный документ и т.д., и системные события, например запуск, удержание, сброс и т.д. Объекты передают и принимают абстрактные формы сообщений к другим объектам. Объекты интерпретируют сообщения на основе их источника и содержания. Примерами источников могут служить процессор терминала, контролер модуля или конкретный объект процессора модулей. Содержание зависит от источника и идентификатора сообщения. Эта архитектура позволяет любому объекту принимать сообщение конкретного пункта отображения, обусловленное уникальным физическим документом. Предпочтительный вариант архитектуры также обеспечивает обработку всех сообщений как от объекта к объекту, даже если конечным адресатом сообщения является другой процессор, такой как процессор терминала или контролер модуля. Различия в физических слоях прозрачны для пользователя.
Процессор модулей имеет категории разных классов, в которых группируются один или несколько сходных классов. Эти категории классов и их соотношения схематично представлены на фиг.71. Категория класса команд электронной передачи данных (EDT-команд), схематично обозначенная ссылочной позицией 700, обеспечивает обработку и направление команд к устройствам, связанным с контролерами модулей. EDT-команды передают соответствующие команды к EDT-модулям 702 и принимают уведомления, когда документы завершили свое перемещение. EDT-команды 700 также поддерживают краткий обзор выполнения команд для более позднего использования и для предоставления процессору терминала конечного результата. Эта категория классов также имеет режим переключения для всех информационных обменов с процессором терминала.
Категория класса EDT-команд поддерживает общий статус системы, статус выдачи и статус приема. Она проверяет команды с учетом текущего статуса системы и отклоняет те команды, которые она не может обработать. EDТ-команды также проверяют ввод команд и параметров из процессора терминала. Они обрабатывают локальным образом ошибки интерфейса и ошибки аппаратных средств, которые являются результатом сбоев в осуществлении связи.
Классы в составе категорий классов EDT-команд включают в себя классы интерфейса. Классы интерфейса интерпретируют и обрабатывают сигналы процессора терминала, представляющие команды, выдают результаты команд, организуют последовательность выдачи документов, отслеживают завершение перемещения документов и выключают систему, когда перемещение документа завершено.
EDT-команды также включают в себя класс результатов помещения документов. Результаты помещения интерпретируют сообщения, которые показывают, что перенос документа завершен, сохраняют результаты и обрабатывают результаты для формирования отклика на перемещение документа для процессора терминала. Они также поддерживают краткий обзор перемещений средств и упорядочивают перемещения средств по составным их частям. Класс результатов помещения документов добавляет новую запись к результатам для каждого документа, который достиг своего места назначения, и сохраняет запись о переносе для данного документа. EDT-команды также включают в себя класс статуса. Класс статуса сохраняется состояние системы и считывает состояние индивидуальных элементов. Класс статуса также определяет, возможно ли потенциальное перемещение документа. Если такое перемещение невозможно, то он может отклонить команду.
EDT-команды также включают в себя класс результатов снятия документов. Этот класс интерпретирует сообщения снятия процессора терминала и обеспечивает последовательность снятия. Класс результатов снятия также сохраняет результаты и обрабатывает результаты для получения отклика перемещения документов процессора терминала. Краткий обзор перемещений документов поддерживается и упорядочивает перемещения документов по их составным частям. Класс результатов снятия также проверяет реальные результаты с документами по отношению к тому, что ожидалось, и выдает дополнительные сообщения для завершения сообщения снятия процессора терминала, если результаты не соответствуют тому, что запрашивалось.
В ходе транзакции снятия документов EDT-команды 700 выдают команды выдачи в EDT-модули 702 без учета возможных ситуаций взаимных помех от предшествующих команд выдачи. EDT-модули обеспечивают проверку наличия помех от других модулей и внутри текущего модуля. Это позволяет EDT-модулям 702 выполнять подготовку модуля в течение времени существования помехи. В результате документы выдаются, как только помеха пропадает. EDT-модули 702 возвращают системное событие (выдача завершена) к EDT-командам 700 и блокируют позицию, где завершена выдача. Системное событие завершения выдачи запускает EDT-команды 700 для подачи следующей в последовательности команды выдачи. Каждый экземпляр перемещаемых документов будет приводить к сообщению о системном событии (документ поступил) для EDT-команд после достижения места назначения. EDT-команды будут использовать эту информацию для завершения транзакции, обновления результатов, выключения системы и передачи сообщения в процессор терминала.
Поскольку EDT-команды могут передавать команды выдачи без учета взаимных помех, то категория 702 класса EDT-модулей должна определять, когда она может начать обработку следующей выдачи документов. Для выполнения этого EDT-модули 702 обеспечивают ожидание до тех пор, пока последний документ, относящийся к предыдущей команде выдачи, не попадет в сегмент периферийного механизма транспортировки и не будет перемещен по вертикали в направлении центрального механизма транспортировки. EDT-модули 702 регистрируют "событие промежутка" от модуля на интервале помехи. Сообщение о событии планирует опцию доставки после того, как это событие обеспечит надлежащий промежуток между перемещаемыми документами. Таким образом, EDТ-модули 702 будут принимать события, когда это им необходимо, а не точно тогда, когда они возникают реально.
Категории класса EDT-команд и категории класса EDT-модулей также взаимодействуют, когда документы перемещаются из положения депонирования зоны 50 ввода/вывода и помещаются в зоны хранения в автомате. EDT-команды 700 вызывают EDT-модули 702 для представления стопки документов в устройства разборки стопки, устранения перекоса и центрирования. EDT-команды 700 подают команду помещения документов в EDT-модули. Каждый экземпляр перемещаемых документов выдает сообщение о системном событии (документ поступил) к EDT-командам после достижения своего места назначения. EDT-модули отвечают системным событиям (прием завершен) для EDT-команд и выполняют выключение системы после того, как последний документ достигнет своего места назначения, на основе идентификации документа устройством ПДВДП. EDT-команды затем вызывают EDT-модули для отключения всех модулей, когда принимается последнее системное событие, указывающее, что принят последний документ.
Другим примером является действие EDT-команд и EDT-модулей, когда автомат работает так, чтобы идентифицировать документы, помещенные пользователем, и удерживать их в зоне депонирования до тех пор, пока пользователь не укажет, что они должны быть помещены в автомат. EDT-команды 700 передают команды к EDT-модулям 702 для перемещения стопки документов в устройство разборки стопки, устранения перекоса и центрирования. Для перемещения всей стопки в зону депонирования EDT-команды подают команду "все депонировать" к EDT-модулям. EDT-модули запускают контроллер модулей для центрального механизма транспортировки, после того как каждый документ идентифицирован устройством ПДВДП. EDT-модули устанавливают место назначения (адресат) соответственно как "прием депонированных документов" или "отбраковка депонированных документов". Каждый документ обеспечивает передачу сообщения "документ поступил" после достижения им своего места назначения либо в зоне депонирования, либо в зоне отбраковки. EDT-команды поддерживают счет каждого документа в зоне депонирования и в зоне отбраковки. Модули выключаются на время ожидания подтверждения пользователем транзакции. EDT-команды затем пересылают результат в процессор терминала.
Если пользователь подтверждает сумму и указывает, что ему желательно поместить документы в автомат, то система возвращает отбракованные банкноты, как описано выше, а стопка документов направляется к устройству разборки стопки, устранения перекоса и центрирования. И затем отслеживается режим приема. Если, однако, пользователь отменяет запрос, EDT-команды 700 подают команду о том, что все банкноты должны быть возвращены. Возвращаемые документы включают как те, которые находятся в зоне отбраковки, так и приемлемые банкноты, удерживаемые в зоне депонирования. Процессор модулей контролирует эти действия в соответствии с сигналами от датчиков в зоне ввода/вывода.
EDT-модули 702 обеспечивают управление системой в процессе нормального функционирования. EDT-модули 702 формируют собственное представление из индивидуальных модульных элементов. Модульными элементами являются датчики, заслонки и позиции, которые документы пересекают в системе. Каждый модуль подготавливается к транзакции и гарантирует, что все требования модуля удовлетворяются для обеспечения надлежащего функционирования. В предпочтительном варианте осуществления имеются два типа модулей: центральный механизм транспортировки (ЦМТ) и мультимедийное устройство рециклирования (МУР). Класс EDT-модулей обеспечивает запуск всех модулей в системе в начале транзакции. В нем также известен конкретный интерфейс к каждому модульному элементу, такому как секция мультимедийного устройства рециклирования или заслонка. Это справедливо как для передачи, так и для приема сообщений интерфейса. Эта категория класса управляет всем модулем, включая действия физических элементов секции и заслонки. Она также обеспечивает контроль датчиков.
EDT-модули создают модульные элементы, которые представляют физические модули. Каждый модульный элемент имеет номера слотов и позиций для идентификации его положения и его типа, например заслонка, ячейка, датчик и т.д. Каждый модульный элемент имеет информацию о конкретном интерфейсе с его физическим прототипом. Это позволяет обрабатывать передаваемые и принимаемые сообщения в одном контексте в противоположность разбиению их на категории классов.
EDT-модули 702 поддерживают различные списки и последовательности. Последовательности сохранения и событий, поясняемые ниже, устанавливают систему для перемещения каждого документа.
Категория 702 класса EDT-модулей также содержит карту, которая служит в качестве руководства к переходам между устройствами, через которые могут проходить документы. Подобно водителю, использующему карту для того, чтобы попасть в место назначения, документы используют аналогичную карту. Объекты документов пересекают систему с использованием виртуальной карты. Карта представляет собой представление с помощью программного обеспечения физического порядка EDT-модулей и модульных элементов. Вместо физического ввода в каждом местоположении имеется представление с помощью программного обеспечения, которое содержит информацию относительно состояния модульного элемента. В терминах программного обеспечения карта представляет собой связанный список объектов, объединенных непрямыми ссылками, уникальных для каждого модуля, который они представляют. Сама карта состоит из этих элементов, заслонок, ячеек, механизмов транспортировки, датчиков. Как графически представлено на фиг. 72, каждый модуль представляет собой номер слота (области, занимаемой страницей), начиная с ЦМТ при нулевой области, занимаемой страницей. Номера слотов увеличиваются с перемещением вниз стекового списка модулей в МУР и уменьшаются с перемещением выше ЦМТ. Следует отметить, что, как показано на фиг.72, номера слотов отрицательны выше ЦМТ, и позиции механизма вертикальной транспортировки, образующего сегменты периферийного механизма транспортировки, присвоен номер нулевой позиции. Позиции, которые находятся выше ЦМТ на фиг.72, являются позициями для дополнительных модулей в архитектуре и не используются в автомате 10.
Номера позиций начинаются с нулевого, указывающего механизм вертикальной транспортировки, относящийся к сегментам периферийного механизма транспортировки. Номера позиций увеличиваются с перемещением от механизма вертикальной транспортировки. Например, каждое МУР имеет пять позиций. Они начинаются с нулевой для механизма вертикальной транспортировки в сегменте периферийного механизма транспортировки и имеют номера с первого по четвертый, соответственно каждой из четырех зон хранения или секций, при перемещении от механизма вертикальной транспортировки.
Виртуальная карта сохраняет и организует данные статуса и элементов системы, которые показывают, являются ли определенные элементы исправными, неисправными, полными, пустыми и т.д. Они могут также указывать состояния, например, секций или банкнот, которые загружаются, расстояние и положение. Карта может также содержать счет транзакций с использованием документов, сдвоенных документов и повторных попыток. Карта также используется в качестве хранилища информации для организации и описания состояния модульных элементов. В типовом случае если EDT-модули 702 принимают сообщение от контроллера модуля, они используют адресные данные, номер датчика или секции для определения местоположения соответствующего модульного элемента. Модульный элемент содержит отсчеты и списки, которые позволяют модулям отслеживать активность и состояние.
Виртуальные карты, созданные категориями классов модулей EDT-модулями, представлены на фиг.73 и 74. Фиг.73 показывает виртуальную карту, соответствующую устройствам в центральном механизме транспортировки. Виртуальный элемент 710 соответствует устройствам, которые служат для разборки стопки, устранения перекоса и центрирования документов в центральном механизме транспортировки. Виртуальный элемент 712 соответствует секции механизма транспортировки, которая обеспечивает перемещение потока документов к устройству идентификации документов (ПДВДП), которое показано как виртуальный элемент 714. Документы затем проходят через виртуальный элемент 716, который соответствует механизму транспортировки, перемещающему документы к виртуальному элементу 718, который соответствует датчику.
Элемент механизма транспортировки, представленный виртуальным элементом 720, соединен с виртуальным элементом 722, который соответствует заслонке центрального механизма транспортировки, которая направляет документы в одном из трех направлений. Виртуальный элемент 722 соединен с элементом 724, который соответствует транспортировке в зону приема депонируемых документов, представленную виртуальным элементом 726.
Заслонка центрального механизма транспортировки, представленная виртуальным элементом 722, также соединена в виртуальной карте с элементом 728, который представляет перемещение в зону отбраковки или отбраковку депонированных документов, как представлено элементом 730. Аналогично заслонка центрального механизма транспортировки может также направлять документы к механизму вертикальной транспортировки, образованному сегментами 108, 110, 112 и 114 периферийного механизма транспортировки. Это осуществляется устройством, представленным виртуальным элементом 732 на фиг.73.
Виртуальный элемент 734 на фиг.73 представляет механизм транспортировки, переносящий документы из сегментов периферийного механизма транспортировки в центральный механизм транспортировки, например, как в случае транзакции выдачи. Следует отметить, что хотя один и тот же физический механизм транспортировки используется в транзакциях помещения вклада и снятия, тот же самый физический элемент представлен двумя виртуальными элементами.
На фиг. 74 представлена виртуальная карта для МУР. Она включает в себя виртуальный элемент 736, который соответствует датчику, расположенному рядом с заслонкой, представленной виртуальным элементом 738. Механизм транспортировки, соответствующий сегменту периферийного механизма транспортировки, представлен виртуальным элементом 740.
Физические элементы, связанные с контейнером повторного использования, и контейнерный механизм доставки представлены виртуальным элементом 742, который соответствует элементу механизма транспортировки, расположенному рядом с заслонкой. Каждая из четырех секций в контейнере повторного использования имеет три виртуальных элемента, связанных с устройствами в нем. На фиг.74 показаны только две из четырех секций или зон хранения. Виртуальный элемент 744 соответствует секции механизма транспортировки контейнерного механизма доставки. Виртуальный элемент 746 соответствует датчику, находящемуся рядом с секцией, а элемент 748 соответствует секции. Ясно, что управление системой посредством виртуальных элементов, операциями с которыми на детальном уровне управляют задачи в контроллере модулей, значительно сокращает сложность классов на уровнях процессора терминала и процессора модулей, необходимых для управления операциями системы.
Модули в категории 702 класса EDT-модулей включают в себя класс выбора места назначения (адресата). Этот класс обеспечивает выбор места назначения депозита на основе идентификации документов и различных параметров эвристического управления. Выбор места назначения также определяет конечные пункты для формирования последовательностей процедур сохранения и события. Этот класс также обеспечивает выбор места назначения для документов, которые вызывают проблемы при выдаче, такие как сдвоенные документы.
Позиции используют выбор места назначения для определения средней точки в соответствующих последовательностях сохранения. Средняя точка определяет конец последовательностей выдачи и начало последовательностей приема. Каждая позиция в стековом списке модулей также регистрирует данные, идентифицирующие документ, используемые устройством ПДВДП, для индикации документов, которые могут быть приняты в этом классе. Выбор места назначения приводит классы к набору возможных пунктов приема для каждого типа документа.
Устройство ПДВДП активизирует выбор места назначения при разрешении идентификатора конкретного шаблона. Процедура выбора места назначения затем проверяет свой набор возможных мест назначения для отыскания подходящей зоны хранения. Если ни один элемент не может принять документ, то он транспортируется для отбраковки или отклонения, в зависимости от режимных установок.
Выбор места назначения также включает места назначения, вызванные вспомогательным классом. Места назначения представляют собой набор ссылок элементов модулей на все возможные элементы стекового списка, где могут быть размещены носители (документы). Выбор места назначения включает массив, соответствующий числу шаблонов, каждый из которых имеет отсылку на класс мест назначения. Если найден конкретный идентификатор шаблона, то процедура выбора мест назначения индексирует массив и запрашивает набор ссылок элементов модулей о нахождении наилучшего места размещения помещаемого вклада.
EDT-модули 702 также включают в себя класс последовательности событий. Класс последовательности событий формирует последовательность событий от данного элемента модуля к другому элементу модуля. Он также организует список событий. Класс последовательности событий формирует и сохраняет последовательность событий для пользователя. Управление обеспечивает копирование этой последовательности на конкретный экземпляр документа для ссылки в процессе перемещения. Последовательность событий представляет последовательность объектов событий, упорядоченных вместе в хронологически организованный поток.
Последовательность событий выстраивается сама собой путем запуска в источнике и прохождения в системе через промежуточные механизмы манипулирования документами в желательное место назначения. Класс последовательности событий создает событие для элемента каждого типа модуля и помещает его в последовательность. Класс элемента модуля обеспечивает перемещение (навигацию) в системе. После того как последовательность событий сформирована, этот класс вычисляет интервалы времени между событиями датчиков, исходя из их расстояний. Позициям соответствуют заданные интервалы времени между событиями, поскольку они в большей степени зависят от механизма, чем от расстояния.
Каждая позиция имеет одну или две последовательности событий. Например, устройству разборки стопки, устранения перекоса и центрирования соответствует только последовательность событий выдачи. В противоположность этому секции МУР соответствуют последовательности событий выдачи и приема.
Каждая последовательность событий, при рассмотрении ее отдельно, перекрывает только часть перемещения носителя. Последовательность событий секции МУР включает в себя перемещение от секции до некоторой точки вовне, если доступны результаты, полученные устройством ПДВДП (датчик заслонки зоны депонирования), причем в указанной точке принимается решение относительно конечного места назначения носителя. Перенос носителя в конечное место назначения связан с другой последовательностью событий, которая добавляется к исходной последовательности событий, чтобы обеспечивать направление остальной части носителей. Класс последовательности событий добавляет в точке добавления новую последовательность и обеспечивает настройку синхронизации. Частичные последовательности событий освобождают от необходимости редактирования объекта проверки из класса 704 отслеживания носителей, если исходное желательное место назначения носителей некорректно.
Класс очереди сохранения EDT-модулей использует очередь сохранения в качестве ключа к представителям класса носителей, по мере того как носитель проходит в системе. Когда событие возникает в элементах модулей, они проверяют в очереди сохранения, какое событие носителя ожидает данного события. Элементы модуля знают, что событие активизирует их для удаления носителя из очереди. Обычно это событие для датчиков и заслонок соответствует обнаружению заднего края носителя, а для позиций - событие выдачи/приема.
Класс последовательности сохранения EDT-модулей формирует и сохраняет последовательность сохранения для пользователя. После ее формирования пользователь может вызывать процедуры сохранения элементов модулей на пути перемещения носителей в их место назначения. Каждое сохранение приводит к тому, что указатель носителя должен добавляться к очереди сохранения элемента модуля. Когда носитель проходит элемент модуля, указатель "всплывает" из очереди и используется для разрешения соответствующей программе межобъектного взаимодействия осуществлять дальнейшие события.
Последовательность сохранения формируется сама собой путем запуска ее в источнике и прохождения в системе к требуемому месту назначения. Элементы модуля принимают решения, должны ли они быть включены в эту последовательность, и имеют информацию о том, какой элемент является следующим на пути к месту назначения. Класс элемента модуля обеспечивает перемещение в системе.
Каждой позиции соответствуют одна или две последовательности сохранения. Устройство разборки стопки, устранения перекоса и центрирования имеет только последовательность сохранения для выдачи. Секции МУР соответствуют последовательности сохранения для выдачи и для приема. Каждая последовательность сохранения, при отдельном ее рассмотрении, охватывает лишь часть перемещения документа. Последовательность сохранения для секции МУР занимает область от секции до точки приема результатов, полученных устройством ПДВДП. В этой точке принимается решение относительно конечного места назначения документа. Конечное место назначения включает в себя другую последовательность сохранения, которая завершает сохранение и охватывает остаток пути перемещения документа. Частичные последовательности сохранения исключают необходимость в исключении сохранений из элементов модулей, если первоначально определенное желательное место назначения документа является некорректным. В предпочтительном варианте осуществления изобретения предусмотрена возможность "реверсирования". Например, это может оказаться необходимым, если в определенной позиции ожидается появление документа для выдачи, а его нет. Примером такой ситуации может служить отсутствие отклика с устройства разборки стопки, устранения перекоса и центрирования.
Класс администратора модуля EDT-модулей 702 действует как пользовательский интерфейс для управления EDT-модулями. Он координирует действия между модулями, активизируя операции и отключая модули в ответ на запросы операций при завершении события. Его задачей является обеспечение помощи администратору модуля в управлении текущей и ожидающей выдачей. Снятие задачи также приводит к формированию и передаче сообщений отмены к модулям.
Класс элемента модуля EDT-модулей играет главную роль в формировании последовательностей сохранения и последовательности события. В них известно, должны ли они включаться в заданную последовательность сохранения, а их типы определяют, какие вводы данных, если необходимо, требуется осуществить в последовательностях события.
Элементы модулей также имеют информацию о навигации в системе для перехода в заданную точку. Они следуют правилам, основанным на номерах слотов и рабочих позиций (станций) для достижения конкретного местоположения. Способ навигации в системе является виртуальным и субклассы объектов, таких как заслонки, приводят к замене этого способа в специальных случаях. Например, заслонка имеет третий указатель элемента модуля на ее точку переключения и осуществляет навигацию в системе в эту точку при вводе данных слота модуля.
Элементы модуля соответствуют физическим элементам и включают класс элементов модуля устройства ПДВДП. Устройство ПДВДП активизирует и отключает элемент и проверяет отклики на своевременность и действительность. Элемент выполняет функции детектирования подделок и проверки валюты в течение режима приема и функцию определения номинала валюты только в процессе выдачи. Откликом с устройства ПДВДП являются идентификатор шаблона и некоторые дополнительные данные достоверности. Устройство ПДВДП также фиксирует событие переднего края документа, которое передается в устройство 704 отслеживания документов в виде события переднего края и заднего края документа, так как устройство отслеживания ожидает появления событий переднего края и заднего края соответственно для каждого датчика. Устройство ПДВДП интерпретирует данные и принимает решение относительно того, следует ли направлять носитель в зону хранения или в иное местоположение для действительных носителей либо следует отбраковать его. Устройство ПДВДП обнаруживает сдвоенные носители и угол перекоса носителей. Устройство ПДВДП учитывает эти факторы при принятии решения о том, является ли документ действительным или допустимым. Устройство ПДВДП использует выбор места назначения для нахождения местоположения, соответствующего статусу документа, например нормальный, сдвоенный, имеющий силу, отбракованный и т.д. Устройство ПДВДП обновляет данные отслеживания носителей данными об идентификаторе шаблона, угле перекоса и иными соответствующими данными и использует окончательно определенное место назначения для завершения последовательности событий отслеживания носителей и требуемого сохранения.
Класс элемента модуля заслонки является абстрактным классом, который моделирует поведение, общее для всех заслонок. Соленоиды, управляемые контроллерами модулей, управляют физическими элементами заслонок. Класс заслонки содержит данные соленоида и инициализирует параметры управления контроллера модулей.
Каждая заслонка связана с датчиком. Датчик направляет данные о событии к заслонке. Заслонка интерпретирует событие, обращается в очередь сохранения и изменяет свое состояние для направления следующего документа вдоль определенного пути к месту его назначения. Заслонка имеет информацию о том, когда передавать сообщение контроллера модулей, на основе размера текущего носителя и размера следующего носителя. Если действие должно предприниматься спустя некоторое время задержки, то заслонка планирует передачу сообщения контроллера модулей спустя определенное время задержки. В противном случае сообщение контроллера модулей передается немедленно.
Заслонка основывает свое решение состояния на том, как направлять следующий носитель при его проходе. В ситуациях, когда отсутствует указание на следующий носитель в очереди сохранения, заслонка изменяет состояние для данного объекта немедленно. Примером такой ситуации является направление самого первого документа в транзакции. Заслонке известно об изменении состояния для следующего носителя, когда текущий носитель проходит заслонку. Если отсутствует текущий документ, который должен ожидаться, то очевидно, что нет необходимости в таком ожидании. Поэтому когда заслонка получает событие сохранения для носителя и очередь документов пуста, то заслонка изменяет состояние для данного носителя немедленно.
Класс заслонки функционирует для удаления носителей из очереди сохранения, когда он принимает событие переднего края носителя от датчика. Имеются два конкретных субкласса этого класса заслонки. К ним относятся заслонка центрального механизма транспортировки и заслонка механизма транспортировки по вертикали. Каждый обеспечивает замену виртуальных методов для заслонки при необходимости реализации этих специальных случаев.
Класс позиции является абстрактным классом, который моделирует поведение, являющееся общим для всех позиций. Пользователь активизирует/блокирует позиции для выдачи или приема. Позиции обеспечивают последовательную выдачу ряда документов или асинхронный прием документов.
Каждая позиция формирует свои последовательности сохранения и события в соответствии с их специфическими потребностями. Например, последний датчик в последовательности события приема для секции МУР не формирует события края документа. Если секция активизирована, ее датчик используется для обнаружения приема носителя, но не для обнаружения края. Для конкретной позиции это известно, и она формирует свои последовательности несколько отличающимся образом. Она формирует последовательность от точки непосредственно за ее датчиком до средней точки и затем от средней точки то точки непосредственно за ее датчиком. Тот же пример справедлив для первого датчика в последовательности выдачи. В каждой позиции известно, какие специальные правила определяют формирование каждой последовательности. Это определяет то, каким образом уникальные признаки и правила модулей и элементов модулей отражаются в последовательности события.
Класс депонирования служит в качестве конкретного класса для станций (устройств) "приема депонированных документов" и "отбраковки депонированных документов". Центральный механизм транспортировки инициирует этот класс дважды, один раз для принятия депонированных документов, а второй раз для отбраковки депонированных документов. Единственным отличием является номер станции. Депонированию соответствует одна последовательность сохранения и одна последовательность события, обе от средней точки до данного элемента модуля. Устройство ПДВДП активизирует полный способ приема носителей, который пересылает место назначения носителя в последовательность события, которое обеспечивает сохранение для носителя.
Способ сообщения обработки просто интерпретирует сообщение приема, удаляет следующий носитель из очереди сохранения и пересылает событие наличия носителя. Депонирование также поддерживает для транзакции счет числа принятых носителей и фиксирует факт отсутствия депонированных носителей.
Класс секции МУР управляет всеми ячейками хранения в автомате. Секция МУР активизирует и блокирует элемент и проверяет отклики по своевременности и действительности. Для проверки отклика контроллера модулей секция МУР планирует обратный вызов способа таймаута. При приеме отклика на команду обратный вызов отменяется. Если способ таймаута выполняется, то контроллер модулей не ответил в течение назначенного времени, и активизировано действие восстановления.
Секция МУР имеет две последовательности события, одна для помещений вкладов и другая - для снятий. Последовательность снятия определяет события, которые устройство отслеживания носителей ожидает от данной секции, для стекового списка. Последовательность помещения вклада определяет события, которые ожидаются средствами отслеживания документов от ПДВДП, для данной секции.
Секции активизируются или блокируются в месте назначения следующего носителя. Если это место назначения следующего носителя, то секция активизируется. В противном случае она блокируется. Секция МУР связана с датчиком, который имеет очередь сохранения всех носителей для прохождения через этот датчик. Датчик направляет события к секции, и секция принимает решение, каково должно быть ее следующее состояние. Эти состояния соответствуют состояниям "внутрь" - для направления носителей в секцию или "через" - для сквозного прохождения носителей. Если действие должно производиться спустя некоторую задержку, то секция планирует передачу сообщения контроллера модулей с некоторой задержкой. В противном случае сообщение контроллера модулей направляется немедленно. Секция МУР настраивает значение таймаута для компенсации задержки в доставке сообщения.
Класс секций МУР основывает свое решение состояния на том, как направлять прохождение следующего носителя. Вопрос состоит в том, что предпринимать, если в очереди хранения нет следующего носителя. Самый первый носитель в транзакции является примером такой ситуации. В секции известно изменение состояния для следующего носителя, когда текущий носитель освободил секцию. Если нет текущего ожидаемого носителя, то, очевидно, нет необходимости в ожидании. Поэтому если секция принимает событие сохранения для носителя, а очередь сохранения пуста, то секция изменяет состояние для данного носителя немедленно. Секция удаляет носитель из очереди сохранения, когда она принимает сообщение, принятое контроллером модулей. Если класс секции МУР действует для выдачи носителя, то секция ожидает, чтобы предыдущий выданный носитель очистил секцию, и затем активизируется. Она получает и инициализирует событие носителя, освобождает носитель и передает команду контролеру модулей о выдаче некоторого числа носителей. Контроллер модулей устанавливает промежуток и передает сообщение по мере выдачи каждого носителя. Когда секция получает сообщение о каждом выданном носителе, она интерпретирует сообщение о выдаче как состояние носителя. Секция обновляет данные носителя этим его состоянием (обычно являющимся нормальным) и направляет событие выдачи к текущему носителю в его очереди сохранения и получает и инициализирует следующий носитель. После того как произведена последняя выдача, секция блокируется и передает сообщение завершения пользователю.
Инициализация носителей влечет за собой установку физических параметров и указателей источников и мест назначения. Секция также устанавливает последовательность событий отслеживания носителей и осуществляет соответствующие процедуры сохранения. Вся инициализация завершается, прежде чем носитель будет выпущен из секции. Секция удаляет носитель из своей очереди сохранения при получении сообщения о выдаче.
Элементы модуля также включают в себя класс датчиков. В начале транзакции все датчики приводятся в состояние восприятия носителей. Такая активизация и отключение датчиков обрабатывается контроллером модуля как составная часть процедуры управления модуля. Каждый элемент датчика имеет информацию о том, что необходимо сделать для контроля осуществления заданной транзакции. Например, при выдаче датчик может контролировать только задний край носителя, в то время как при приеме он может осуществлять обнаружение переднего и заднего краев. В конце транзакции датчики отключаются или переходят в режим "редкого" контроля на предмет обнаружения посторонних предметов в механизме транспортировки.
В процессе транзакции класс датчиков принимает сообщения и принимает решения об их действительности, чтобы определить, являются ли корректными данные сообщений. Класс датчиков также имеет очередь сохранения, содержащую упорядоченный список носителей для перемещения. Датчик обращается к очереди сохранения в связи с носителем, вызвавшим событие, и следующим ожидаемым носителем. Если данный датчик имеет элемент управления, то событие направляется к элементу управления. Затем событие направляется к носителю, вызвавшему событие, для проверок синхронизации событий и позиционирования. Наконец, датчик обновляет данные в очереди сохранения.
Датчик также предусматривает метод восстановления, если средства отслеживания носителей определили, что они пропустили событие. Датчик допускает, что событие имело место. Он осуществляет все действия, которые совершались бы в нормальном случае, что касается очереди, точки управления и т.д., но не передает событие обнаружения края к носителю, поскольку средства отслеживания уже блокировались из-за датчика.
Модули также включают класс разборки стопки-устранения перекоса-центрирования (РУПЦ). РУПЦ активизируется и блокируется как составная часть управления модуля. РУПЦ выдает команду сообщения выдачи для начала выдачи носителей. Контроллер модуля управляет функциями разборки стопки, устранения перекоса и центрирования локальным образом, включая установку промежутков между перемещаемыми носителями. Контролер модуля продолжает разборку стопки, устранение перекоса и центрирование до тех пор, пока все перемещаемые средства не будут исчерпаны или не будет подана команда остановки. При приеме каждого сообщения выдачи РУПЦ интерпретирует сообщение и обновляет данные для перемещаемых средств с помощью данных, полученных в результате операций разборки стопки, устранения перекоса, центрирования. Затем РУПЦ направляет событие выдачи к перемещаемым средствам. РУПЦ анализирует входные и выходные значения перекоса и центрирования и применяет необходимые смещения, а также использует угол перекоса в качестве центральных данных, используемых ПДВДП для регулировки операции устранения перекоса и центрирования.
Класс РУПЦ не используется в процессе транзакций снятия. Это объясняется тем, что при снятии документы не проходят через часть центрального механизма транспортировки, которая реализует функцию разборки стопки. РУПЦ также выполняет последовательность "пауза-восстановление-возобновление", если контролер модуля указывает на наличие проблемы. РУПЦ запрашивает уведомление, когда последний носитель надежным образом выведен из транспортной линии, выполняет восстановление и затем возобновляет выдачу.
Также предусмотрен класс транспортировки. Этот класс включает сохранение и обеспечение доступа к конкретным секциям механизма транспортировки. Этот класс служит в качестве конкретного класса, который моделирует длину и физические свойства различных механизмов транспортировки, которые манипулируют документами.
Класс модуля служит в качестве абстрактного класса для всех конкретных классов модулей и обеспечивает средство для перехода от модуля к модулю как в направлении приема, так и в направлении выдачи. При инициализации системы модули получают команды построить модель их структуры, состоящей из элементов модуля. Слот каждого модуля соединяется с другими модулями, формируя виртуальную карту системы.
В начале транзакции модули активизируют свои транспортные средства и передают любые другие необходимые элементы, которые оказывают влияние на модуль в целом. Реверсирование выполняется в конце транзакции. Задача управления получает сообщения от администратора модуля и координирует свои элементы модуля для выполнения действия, запрошенного в сообщении. Задача распределения принимает сообщения контроллера модуля из адресов модулей и класс откликов на команды. Таким образом, модуль не интерпретирует конкретным образом все сообщения контроллера модуля.
Классы модулей не включают ответственность за управление индивидуальными элементами модуля. Каждый элемент модуля управляется самостоятельно. Класс модуля служит для координации действий между элементами модуля при подготовке к транзакции или остановке после транзакции.
Классы модулей включают класс центрального механизма транспортировки (ЦМТ). Класс центрального механизма транспортировки моделирует физический модуль ЦМТ. При помещении вклада класс ЦМТ управляет перемещением приема носителей в стопке, введенной пользователем, и удостоверяет, что стопка перемещена к средству разборки стопки. ЦМТ информирует пользователя о приеме стопки. ЦМТ начинает помещение одиночных носителей путем активизации модуля для реализации операции помещения вклада. ЦМТ передает команду РУПЦ о начале выдачи. ЦМТ направляет сообщения контроллера модуля к блокам станций для отключения модуля. Станции осуществляют большую часть работы самостоятельно. После того как посредством РУПЦ выданы все носители, администратор модуля передает команду модулю на выключение, и ЦМТ отключается.
В процедуре снятия ЦМТ активизирует себя и ПДВДП для осуществления операции выдачи. Когда все носители завершили свое перемещение, администратор модуля передает команды на отключение системы, которая выдает команду на отключение модуля ЦМТ. ЦМТ отключается и передает событие завершения.
Класс модуля МУР конфигурирует модуль для помещения вклада (депозита) и активизирует элементы модуля для помещения вклада. В процессе помещения МУР направляет сообщения контроллера модуля к соответствующему элементу модуля. МУР отключает элементы модуля в конце транзакции.
В процессе снятия вклада класс МУР конфигурирует модуль для снятия и активизирует элементы модуля для снятия. Каждая секция осуществляет выдачу в последовательности и информирует модуль после того, как корректное количество носителей было выдано. МУР отключает элементы модуля в конце транзакции.
Класс модулей, кроме того, включает класс обработки стопки. Обработка стопки предусматривает прием носителей от пользователя и затем направляет стопку к РУПЦ. Блок обработки стопки принимает носители от позиции приема депонированных документов и представляет их пользователю. Обработка стопки также включает обработку сообщений контроллера модуля от ЦМТ, который направляет документы в стопки в зоне ввода/вывода автомата. Обработка стопки также гарантирует, что заслонка закрыта после приема или доставки стопки носителей пользователю.
Категория 702 класса EDT-модулей также включает классы управления средствами транспортировки. Управление средствами транспортировки обеспечивает интерфейс для управления транспортировкой в автомате. Этот класс также формирует и передает сообщения транспортировки или сигналы к контроллерам модулей и в ответ интерпретирует средства транспортировки. Классы EDT-модулей используют этот класс для активизации и отключения средств транспортировки в системе.
Категория 704 класса отслеживания носителей функционирует для моделирования каждого участка физических средств в процессоре модулей с помощью посредника. Посредник представляет собой основной класс категории классов отслеживания носителей. Эта категория поддерживает информацию о каждом положении носителя, об идентификации, источнике, месте назначения и синхронизации вместе с некоторыми другими вопросами. Отслеживание носителей отвечает за сохранение всей необходимой информации обо всех средствах, перемещающихся в системе. Каждый представитель класса отслеживания носителей имеет объект подтверждения правильности событий для проверки событий, принимаемых при перемещениях в системе.
Класс отслеживания носителей передает события, когда достигается место назначения или когда обнаруживается проблема события. Он ведет список для рециклирования конечного числа носителей после каждого завершенного перемещения. Этот список также служит для идентификации того, какой из носителей активно перемещается, какие готовы для нового назначения и в каком порядке они высвобождаются. Это по существу образует порядок выдачи.
Класс отслеживания носителей включает "проверку события" по каждому принятому сообщению события. Объект подтверждения правильности события проверяет событие и осуществляет любое заданное действие события. Объект подтверждения правильности события обеспечивает класс отслеживания носителей временем следующего ожидаемого события. Это связано с тем, как обнаруживаются таймауты событий. Если возникает таймаут, то средство отслеживания уведомляет класс восстановления транзакции, который определяет ход исполнения действия. Средство отслеживания останавливает использование объекта подтверждения правильности события, когда оно достигает своего места назначения. Каждый представитель класса носителей отслеживает физический элемент носителей (т.е. документ) в любом месте системы. EDT-модули сохраняют уникальную последовательность события для каждого перемещения в системе, как обсуждено выше. Эта последовательность события считывается в объект подтверждения правильности события класса отслеживания носителей перед высвобождением носителя. Это позволяет каждому представителю класса носителей отслеживать физические носители из любой точки и к любой точке в системе, не оказывая влияния на собственно класс носителей.
Категория класса EDT-модулей отвечает за получение представителя класса носителей и выполнение необходимой инициализации. Она формирует и сохраняет соответствующие последовательности события и сохранения, что позволяет носителю попасть в место назначения и проверить свой маршрут. Наконец, EDT-модули считывают последовательность события для использования ее классом отслеживания носителей, освобождают носитель и передают команду на выдачу физического носителя. Носитель освобождается сначала, поскольку физический носитель может сформировать событие датчика, прежде чем будет принято реальное событие выдачи. Это изолирует систему от событий, представляющихся неупорядоченными, зависящими от места выдачи носителей. Класс отслеживания носителей отвечает за системные события приема и передачи, события обработки от элементов модулей, проверки временной последовательности и обновления данных местоположений носителей. Последовательность событий содержит всю информацию для класса отслеживания носителей, необходимую для обработки событий, информацию о синхронизации, о следующем модуле, положении элемента и другую информацию.
В процессе перемещения документов EDT-модули направляют события в виде сообщений к представителям класса носителей. Эти "события носителей" также позволяют EDT-модулям устанавливать принципиально важные значения на основе сообщений событий, такие как угол перекоса, данные центрирования, шаблон идентификатора и размер документа.
События носителя представляют собой средство, посредством которого EDT-модули и класс отслеживания носителей взаимодействуют для обеспечения того, чтобы перемещение осуществлялось так, как ожидалось. События носителя в принципе представляют собой сообщения от EDT-модулей к классу отслеживания носителей, содержащие информацию о том, как, где и когда события произошли в системе. Это также является средством, посредством которого система обнаруживает потенциальные проблемы или подозрительные условия. В основном носитель маршрутизируется путем отслеживания потока событий, которые должны возникнуть в процессе его перемещения.
EDT-модули имеют объекты последовательности событий, которые содержат события, ожидаемые при переходе от одного элемента модуля к другому. Класс отслеживания носителей содержит объекты подтверждения правильности событий, которые копируют последовательность событий и подтверждают правильность событий по мере того как они принимаются от датчиков, обнаруживающих документы или другие условия.
События могут иметь сбой по времени, по идентификации или источнику. Событие может быть преждевременным, запоздавшим или просто быть неверным событием. Положение носителя проверяется на основе разницы по времени от последней известной опорной точки, которая представляет собой предыдущее событие. Идентификация события определяет такие факторы, как задний край, выданный или принятый, когда соответствующий носитель проходит в системе. Разумеется, событие может поступить из неожиданного положения, что указывает на то, что имело место рассогласование по положению.
Перечень событий носителя, возникающих в системе, и действий, которые осуществляются в ответ на события носителей, представлены в таблице на фиг. 75. Разумеется, в других вариантах осуществления изобретения могут использоваться другие события и соответствующие им действия в связи с перемещением документов в системе.
Объект подтверждения правильности события несет ответственность за знание формата всех сообщений событий, передаваемых от EDT-модулей к классу отслеживания носителей, за то, каким образом сравнивать эти сообщения с событиями последовательности и как подтверждать правильность события в терминах времени и места. Положение носителя обновляется на основе данных конкретного события.
EDT-модули представляют поток событий от источника до средней точки в некоторой позиции после ПДВДП. ПДВДП использует место назначения для завершения последовательности событий в процессе обработки результатов. Это также позволяет событиям выполнять специфические действия модуля или местоположения события. Например, события содержат информацию о том, как обновлять данные местоположения носителя. События могут также нести ту же самую информацию, которая используется при выполнении восстановления транзакции в случае, когда событие имеет сбой.
На фиг.71 категория класса восстановления транзакции обозначена ссылочной позицией 706. Эта категория соответствует процедурам восстановления ошибок носителей на уровне модуля и на системном уровне. Восстановление транзакции имеет функции контроля системы, определения вероятных участков и выполнения соответствующих операций восстановления. Вход в процедуру восстановления соответствует неожиданному поведению и неизвестному состоянию носителя. Выход из процедуры восстановления соответствует известному состоянию системы, готовой продолжать текущую транзакцию, или ухудшенному состоянию системы, или полностью неработоспособной системе.
Класс восстановления транзакции действует как полностью отдельный контекст. Он предполагает наличие системного управления до момента обнаружения ошибки. Класс восстановления транзакции использует объект отслеживания носителей для определения местоположений документов и данных текущего состояния. Как только объект отслеживания носителей обнаружит видимую проблему, он уведомляет класс восстановления транзакции информацией об этом, например об ошибочном или пропущенном событии. Класс восстановления транзакций классифицирует проблему и принимает решение о том, как продолжать обработку.
Класс восстановления транзакции также осуществляет информационный обмен с EDT-командами 700 для указания на то, что восстановление осуществляется, и с EDT-модулями 702 для указания на то, что он осуществляет управление. Класс восстановления транзакции использует EDT-модули в качестве интерфейса для управления и идентификации. EDT-модули затем больше не выполняют автономные действия, а переданы классу восстановления транзакции в данном режиме. Восстановление после ошибок выполняется только в том случае, если оно является надежным в смысле всей последовательности транзакции. Класс восстановления транзакции предпочтительно позволяет транзакции продолжаться до тех пор, пока не появится возможность надежного запуска выполнения. Это может включать доставку носителя, не подверженного влиянию сбоя, в его место назначения, приостановку следующих операций или выключение некоторых секций горизонтального ленточного конвейера. Класс восстановления транзакции несет ответственность за обработку большинства ошибок аппаратных средств, неупорядоченных событий, пропущенных событий, сбоев передач контроллера модуля, застревания носителя и других сбоев.
В процессе восстановления EDT-модули представляют интерфейс управления неделимыми модулями. Класс восстановления транзакции затем осуществляет специальные действия, которые находятся вне нормального операционного контекста EDT-модулей. Текущее состояние модуля помогает определить, в чем состоит проблема и как выполнить восстановление. В процессе восстановления EDT-модули направляют все сообщения событий к классу восстановления событий, а не к классу отслеживания носителей.
Перед выполнением восстановления класс восстановления транзакции направляет команду EDT-модулям обновить состояние всех элементов модуля. Некоторые элементы модуля планируют сообщения контроллера модуля для доставки в будущем. Если восстановление произошло в данный момент, то имеет место потенциальный конфликт состояний. Опрос элементов модуля обеспечивает, что состояние, представленное классом восстановления транзакции, является реальным состоянием, имеющим место в системе.
Класс восстановления транзакции также обращается к классу отслеживания носителей для получения информации о положении носителей в системе. Он будет удерживать некоторые носители и позволять другим носителям перемещаться в их место назначения. События отслеживания носителя обеспечивают процедуру восстановления информацией о носителе, положении, размере, идентификации и времени события, что необходимо для принятия решения в связи с проблемой и восстановления для продолжения выполнения транзакции. Как только восстановление завершено, процедура восстановления сбрасывает все события отслеживания носителя, сохраненные в течение восстановления. Это представляет известное состояние системы, так что последовательность транзакции может продолжаться. Восстановление транзакции предпочтительно не использует события отслеживания носителя для контроля перемещения носителей в процессе восстановления.
Как показано на фиг. 71, категории классов, содержащиеся в процессоре модулей, также включают EDT-протоколирование 750. Категория глобального EDT-протоколирования используется для всех типов протоколирования данных, отслеживания сообщений и регистрации событий пользователя. Логика предусмотрена для информационного обмена с каждым контроллером модуля, между процессором терминала и процессором модулей, между процессором модулей и контроллерами модулей, а также для событий программного обеспечения процессора модулей. Любые текущие записи данных контроллера модуля считываются процессором модулей после каждой транзакции. Процессор модулей сохраняет все текущие записи данных в устройстве массовой памяти после каждой транзакции.
Категория 752 класса межобъектного информационного обмена (МИО) представляет собой категорию класса, которая обрабатывает все информационные обмены от объекта к объекту в процессоре модулей. Любой объект процессора модулей может передать сообщение к любому другому объекту процессора модулей, который выполняет задачу. Межобъектные информационные обмены обеспечивают возможность взаимосвязи объектов друг с другом. Передатчик сообщения определяет, какой объект должен принимать сообщение, и МИО маршрутизирует сообщение к приемнику. МИО также позволяет объектам устанавливать связь с другими процессорами, такими как процессор терминала или контроллер модуля.
МИО регулирует внутренние различия в том, каким образом связываться с другими процессорами. Все сообщения к приемнику МИО помещаются в ту же самую входную очередь и имеют одинаковый приоритет. Пользователи не регистрируются для сообщений от других объектов процессора модулей. Передатчик должен знать идентификатор МИО приемника. Однако приемники сообщений от других процессоров должны вручную регистрировать их идентификатор МИО для адресов, от которых им желательно осуществить прием. Это позволяет множеству объектов принимать сообщения на основе класса сообщений от других процессоров. МИО поддерживает список всех контроллеров модулей, присвоенный им адрес, идентификатор слота, тип модуля и другую информацию.
Для передачи информации к конкретному объекту передатчик получает идентификатор МИО приемника и направляет сообщение к нему. Каждый объект или задача, которые осуществляют информационный обмен через МИО, имеют идентификатор МИО. Пользователи используют МИО для общения с другими объектами процессора модулей. Взаимоотношения создаются пользователем путем создания события очереди приема и использования его для ожидания ввода. МИО выдает пользователям сообщения для передачи. После интерпретации пользователь возвращает сообщения к МИО для повторного использования другим объектом.
Категория класса процессора модулей также включает обработку ошибок, обозначенную ссылочной позицией 754. На фиг.71 категория класса глобальной обработки ошибок используется программным обеспечением процессора модулей для обработки всех ошибок программного обеспечения. Обработка ошибок требует знания текущего состояния системы и в некоторых случаях может ожидать завершения другой обработки. Эта категория содержит подпрограммы проверки, используемые при обнаружении ошибки программного обеспечения.
Категория класса запуска и выключения на фиг.71 обозначена ссылочной позицией 756. Эта категория обладает свойствами и знаниями, позволяющими перевести систему в известное состояние подачи питания. Она также отключает систему в случае необходимости. Запуск включает начальную загрузку каждого контроллера модуля, загрузку прикладных программ и вызов классов запуска других категорий классов. Выключение предусматривает перекачку из подчиненной системы в главную систему установок из энергозависимой памяти и перевод автомата в безопасное состояние.
Хотя категории классов, показанные на фиг.71, используются в предпочтительном варианте осуществления изобретения, в других вариантах могут использоваться другие конфигурации. Функция, выполняемая категориями классов, может выполняться в других процессорах или на других уровнях в иерархии транзакции. Другие варианты осуществления могут включать в себя дополнительные или отличающиеся категории классов.
Фундаментальное преимущество предпочтительного варианта осуществления изобретения состоит в том, что классы позволяют реализовать последовательность событий и последовательность сохранения, связанные с маршрутизацией каждого документа, который перемещается в системе. Это обеспечивает создание очередей сохранения в каждом местоположении, которые используются для контроля перемещений документов и соответствующего их направления. Этот подход позволяет обрабатывать документ с помощью устройств обработки физических документов в системе одновременно без ожидания того, когда каждый документ достигнет своего конечного места назначения, прежде чем начнется перемещение другого документа. В предпочтительном варианте осуществления изобретения процессор терминала доставляет свои команды по доставке документов так, чтобы формировать стопку документов, предназначенную для доставки пользователю. Это позволяет процессору терминала выбирать порядок, в котором документы должны укладываться в стопку. Это может быть важным для некоторых пользователей, например торговцев, которым желательно иметь документы, представленные в определенном порядке. В других вариантах осуществления автомат может содержать сепараторы в зонах хранения, выдача которых может регулироваться аналогично другим документам, чтобы отделять конкретные типы документов, например, по номиналам банкнот. Такие сепараторы могут выдаваться аналогично выдаче других документов, обрабатываемых автоматом.
Как вариант, процессор терминала может функционировать так, чтобы минимизировать скорость обработки транзакции без учета обеспечения стопки документов с определенным порядком документов. В этом случае процессор терминала может передавать сообщения доставки таким образом, чтобы из зон хранения выдавались документы, которые являются ближайшими к центральному механизму транспортировки, и затем они перемещались дальше от центрального механизма транспортировки. Таким образом, документы будут поступать в центральный механизм транспортировки с более высокой скоростью. Документы, которые должны начать перемещаться дальше, могут поступать и присоединяться к потоку документов вслед за этими первыми документами. Конкретный используемый метод будет зависеть от программирования процессора терминала и от потребностей конкретного пользователя, работающего с автоматом.
Как схематично показано на фиг.63, контроллеры 554, 556, 558, 560, 562 и 564 модулей осуществляют связь по шине 566 передачи данных контроллеров модулей. Контроллеры модулей осуществляют связь только с процессором модулей, но не друг с другом. Контроллеры модулей также управляют устройствами 567 посредством соответствующих интерфейсов.
Контроллеры модулей включают программы или задачи, которые управляют связанными с ними устройствами. Задачи представляют собой в общем случае довольно простые процессы, которые часто повторяются при нормальном выполнении операций. Задачи представляют собой конечные автоматы в предпочтительном варианте осуществления и могут инициироваться или прерываться сообщениями от процессора модулей или другой задачи. Программное обеспечение в контроллерах модулей на фиг.76 обозначено ссылочной позицией 758. Контроллер модулей управляет пятью задачами 760, 762, 764, 766 и 768. Следует иметь в виду, что задачи, исполняемые в контроллере модуля, изменяются в процессе работы контроллера модуля, а также изменяется число одновременно исполняемых задач.
Пример работы контроллера модуля схематично показан со ссылками на алгоритм работы программного обеспечения контроллера модуля, связанного с центральным механизмом транспортировки, представленным на фиг.77. На фиг.77 представлены задачи, выполняемые в контроллере модуля в функции времени в ходе обработки стопки документов. Также показан источник сигнала или сообщения, которое инициирует выполнение задачи. Задача 770 статуса модуля является первой задачей, показанной на фиг.77, которая инициируется в контроллере модуля с помощью сообщения процессора модулей. Эта задача связана с приемом стопки документов от пользователя. Задача статуса модуля возвращает сообщение назад к процессору модулей, который затем инициирует задачу 772, в которой стопка документов принимается от пользователя. Эта задача затем инициирует задачу 774, в которой элементы автомата обеспечивают помещение введенной стопки между ленточными транспортерами механизма транспортировки в зоне 50 ввода/вывода автомата, как показано на фиг.4.
Процессор модулей затем инициирует задачу 776, в которой стопка перемещается, и затем задачу 778, которая активизирует модуль. Активизированный модуль затем активизирует задачу 780 формирования стопки. Процессор модулей также инициирует экспорт в задачу 782 и задачу 784 разборки стопки.
Как можно видеть из предыдущего описания операций разборки стопки, устранения перекоса и центрирования, разборка стопки инициирует задачу 786 предварительного центрирования, которая перемещает челночный механизм для захвата документа, который должен быть отделен от стопки. Задача предварительного центрирования затем запускает задачу 788 устранения перекоса. Задача устранения перекоса в свою очередь инициирует задачу 790 центрирования, в которой челночный механизм центрирует выровненные банкноты в механизме транспортировки. После этого задача центрирования инициирует задачу 792 освобождения банкноты. Задача освобождения банкноты затем инициирует повторение цикла разборки стопки в задаче разборки стопки, и процедура работы устройств манипулирования документами продолжается до тех пор, пока все документы не будут разобраны из стопки.
После разборки стопки процессор модулей инициирует задачу 794 блокирования модуля, как экспорт из задачи 796. Ясно, что при выполнении этих задач осуществляется информационный обмен с процессором модулей, так что процессор модулей может координировать транспортировку документов. Сообщения процессора модулей не показаны, кроме сообщений процессора модулей, которые инициируют задачу. Возможность выполнения процессором модулей этих разнообразных задач и управления связанными с ними устройствами позволяет процессору модулей концентрироваться на координации действий перемещения документов.
Как видно с учетом задач 784, 786, 788, 790 и 792, задачи, которые выполняются в контроллере модулей, часто являются взаимозависимыми. Как показано этими задачами, задача может инициироваться в ответ на изменение состояния, которое возникает в другой задаче. В обычных системах обработки транзакций, как только произошло изменение состояния, чтобы инициировать последующую задачу, последующая задача будет продолжаться до завершения. Однако в предпочтительном варианте осуществления изобретения, в котором документы перемещаются одновременно, обычный метод в общем случае не приемлем. Это объясняется тем, что в случае, когда множество документов перемещаются одновременно для достижения более высокой скорости транзакции, изменение в состоянии с переходом к предыдущему состоянию или к последующему состоянию может происходить после того, как последующая задача инициирована. Неуспех в осуществлении соответствующего действия для прерывания или иной модификации задачи после ее запуска может привести к ошибке или отказу автомата.
Для решения проблемы необходимости одновременной обработки документов контроллеры модулей в соответствии с настоящим изобретением содержат администратора задач, обозначенного ссылочной позицией 798 на фиг.76. Администратор задач в предпочтительном варианте осуществления изобретения содержит массив, включающий текущее состояние каждой из задач, выполняемых в контроллере модуля. Состояние каждой задачи проверяется на периодической основе для определения того, изменилось ли состояние, что потребовало бы изменения в выполнении задачи, осуществляемой в текущий момент. В предпочтительном варианте осуществления администратор задачи проверяет состояния всех задач в каждую миллисекунду. Проверка этих состояний показана указателем 799 на фиг.76. Можно видеть, что этот указатель схематично указывает циклическую проверку текущего состояния каждой из задач.
При действии задачи в контроллере модуля администратор задач непрерывно контролирует на периодической основе любые изменения в состояниях, которые могут повлиять на действие другой задачи, выполняемой в текущий момент. Если изменение в состоянии возникает, то любые задачи, которые были инициированы или иным образом запущены в зависимости от предшествующего состояния, модифицируются надлежащим образом в соответствии с их конфигурацией для согласования с изменениями, которые произошли. Например, в операции устранения перекоса и центрирования, как только банкнота отцентрирована, челночный механизм обеспечивает ее освобождение. Если, однако, имеет место сбой и банкнота продолжает оставаться в состоянии захвата челночньм механизмом, то неуспех осуществления операции остановки следующей банкноты до освобождения предыдущей банкноты приведет к коллизии банкнот. Если банкнота не освобождена, то администратор задач может уведомить задачу управления разборкой стопки, чтобы прервать ее осуществление, чтобы воспрепятствовать освобождению другой банкноты для ее перемещения к челночному механизму.
Следует иметь в виду, что это только один пример ситуации, в которой непредвиденное изменение в состоянии обнаруживается администратором задачи и используется для модификации другой задачи. Имеется множество других примеров в системе, очевидных для специалистов в данной области техники. Функционирование администратора задач в каждом контроллере модуля повышает надежность работы системы и позволяет системе обрабатывать непредвиденные события. Следует иметь в виду, что хотя принципы настоящего изобретения описаны на примере трехуровневой конфигурации процессоров (процессор терминала, процессор модулей и контролер модуля-процессоры контролера модуля), в других вариантах осуществления могут использоваться другие архитектуры процессоров. К ним относится использование другого количества уровней процессоров и отличающиеся распределения действий между процессорами. Коме того, следует иметь в виду, что обозначения, принятые для компонентов и характеристик в представленном варианте осуществления изобретения, использованы для облегчения его описания и не предназначены для ограничения функций, которые могут выполняться соответствующими характеристиками и компонентами в других вариантах осуществления.
Таким образом, предпочтительный вариант осуществления изобретения обеспечивает решение поставленных задач, исключает недостатки, свойственные известным устройствам, системам и способам, и позволяет достичь необходимых результатов, как описано выше.
В вышеизложенном описании некоторые термины использованы для краткости, ясности и понимания. Однако при этом использование данных терминов не накладывает никаких ограничений, поскольку они использованы только в описательных целях и должны толковаться расширительно. Описание и иллюстрации приведены только для примера, и изобретение не ограничивается точными деталями, как показано или описано.
В пунктах формулы изобретения любые признаки, охарактеризованные через средства для выполнения указанной функции, должны толковаться как включающие в себя любое средство, способное выполнять указанную функцию, а не как простые эквиваленты конкретных средств, представленных в описании.
На основе описанных признаков, раскрытий и принципов изобретения, способа его создания и функционирования, достигаемых преимуществ и полезных результатов в прилагаемых пунктах формулы изобретения изложены новые полезные структуры, устройства, элементы, конфигурации, узлы, комбинации, системы, оборудование, операции, способы и соотношения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ БАНКНОТЫ ДЛЯ ЭЛЕКТРОННОГО БАНКОВСКОГО АВТОМАТА РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ | 1998 |
|
RU2189345C2 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКТИВНОГО НАПРАВЛЕНИЯ ЛИСТОВ В ЭЛЕКТРОННОМ БАНКОВСКОМ АВТОМАТЕ | 1998 |
|
RU2189283C2 |
| СПОСОБ ВЫРАВНИВАНИЯ И МЕХАНИЗМ ВЫРАВНИВАНИЯ ДОКУМЕНТОВ ДЛЯ ЭЛЕКТРОННОГО БАНКОВСКОГО АВТОМАТА РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ | 1998 |
|
RU2175633C1 |
| СПОСОБ ОБРАБОТКИ ДОКУМЕНТОВ В ЭЛЕКТРОННОМ БАНКОВСКОМ АВТОМАТЕ И ЭЛЕКТРОННЫЙ БАНКОВСКИЙ АВТОМАТ СО СЪЕМНЫМИ КОНТЕЙНЕРАМИ ПОВТОРНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) | 1998 |
|
RU2171770C1 |
| ЭЛЕКТРОННЫЙ БАНКОВСКИЙ АВТОМАТ И СИСТЕМА СО СРЕДСТВАМИ АВТОНОМНОГО АУДИТА | 1998 |
|
RU2206125C2 |
| СПОСОБ РАЗБОРКИ ДОКУМЕНТОВ И СИСТЕМА РАЗБОРКИ ДОКУМЕНТОВ ДЛЯ ЭЛЕКТРОННОГО БАНКОВСКОГО АВТОМАТА РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ (ВАРИАНТЫ) | 1998 |
|
RU2171769C1 |
| ЭЛЕКТРОННЫЙ БАНКОВСКИЙ АВТОМАТ РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ И СПОСОБ ЕГО РАБОТЫ | 1998 |
|
RU2197747C2 |
| АВТОМАТ ДЛЯ ВЫПОЛНЕНИЯ ТРАНЗАКЦИЙ С ПРОВЕРКОЙ КАНАЛА ПЕРЕМЕЩЕНИЯ | 2000 |
|
RU2232423C2 |
| ЭЛЕКТРОННЫЙ БАНКОВСКИЙ АВТОМАТ | 1998 |
|
RU2188455C2 |
| АВТОМАТИЗИРОВАННЫЙ БАНКОВСКИЙ АППАРАТ ВЫДАЧИ НАЛИЧНЫХ ДЕНЕГ С РАЗБОРКОЙ СТОПОК И ПОДТВЕРЖДЕНИЕМ ПОДЛИННОСТИ БАНКНОТ | 2004 |
|
RU2315360C1 |
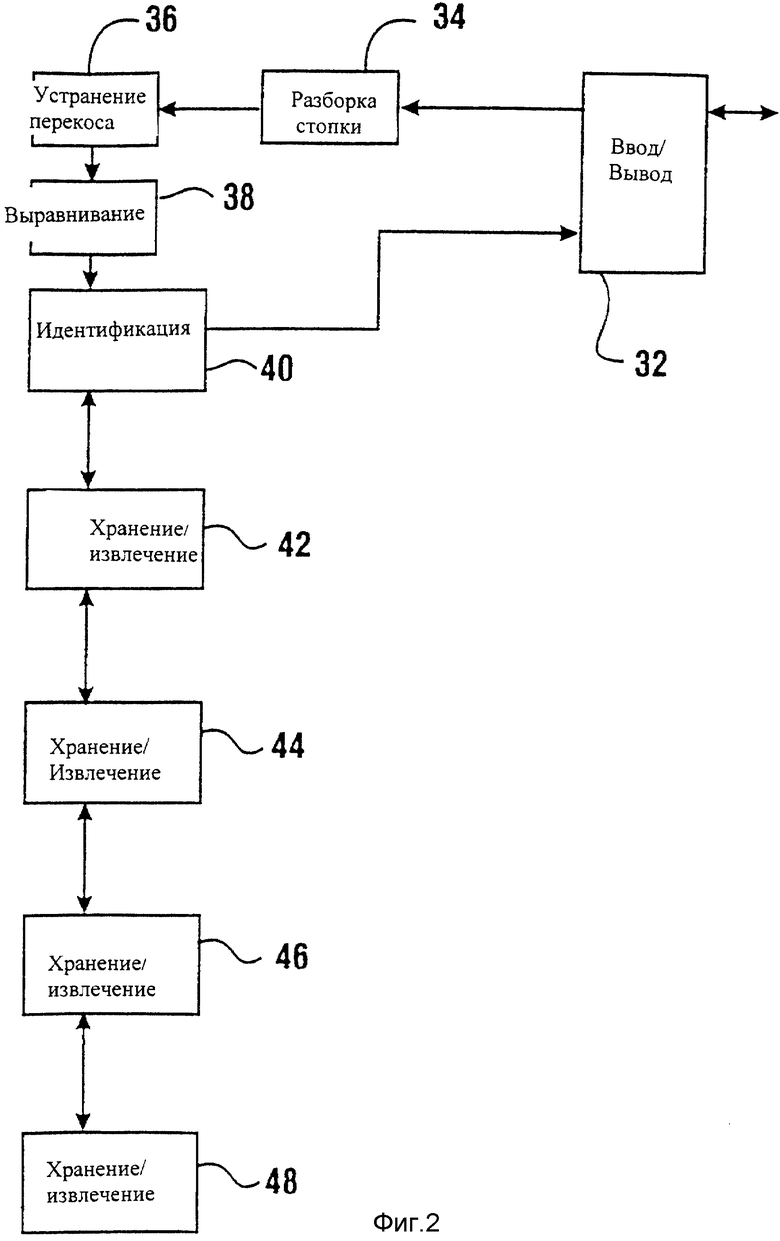
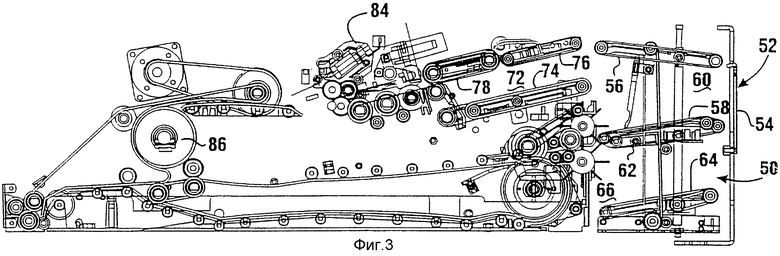
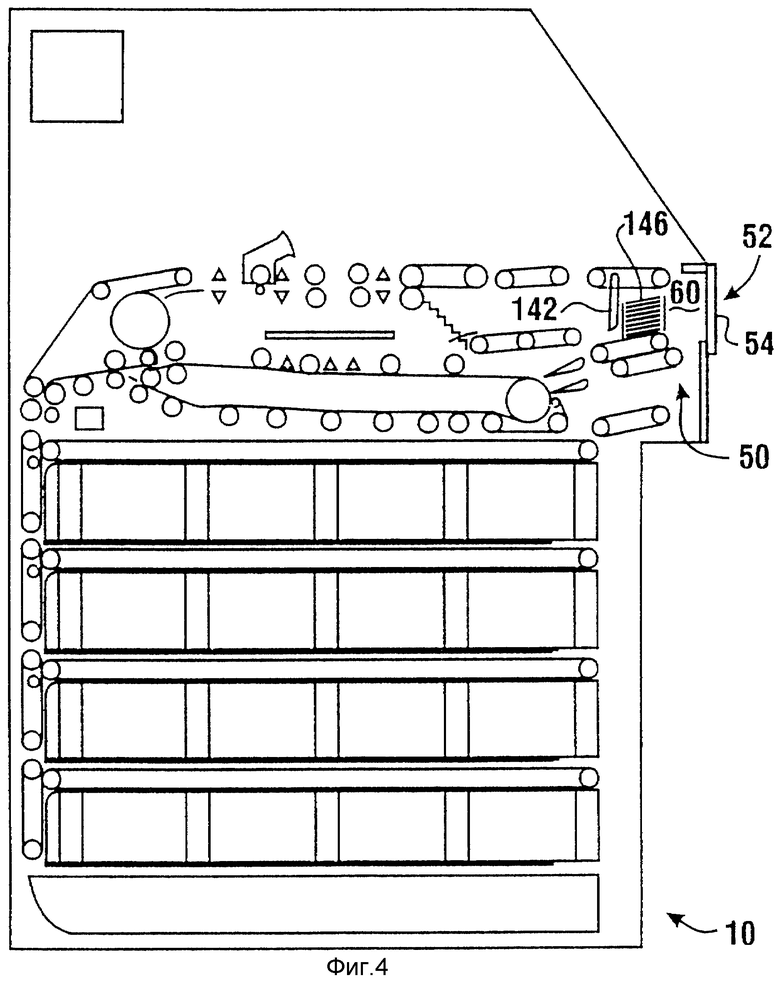
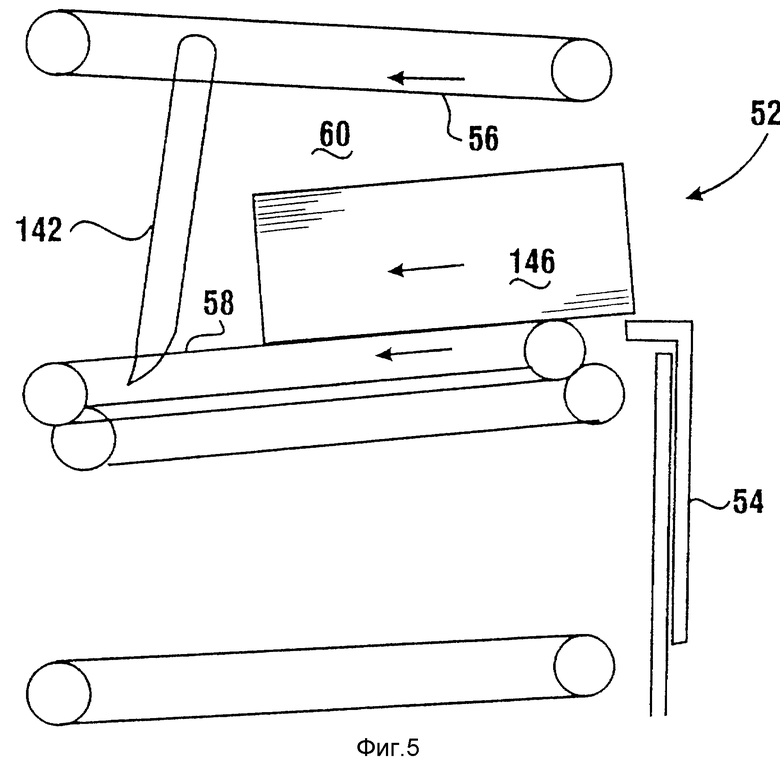

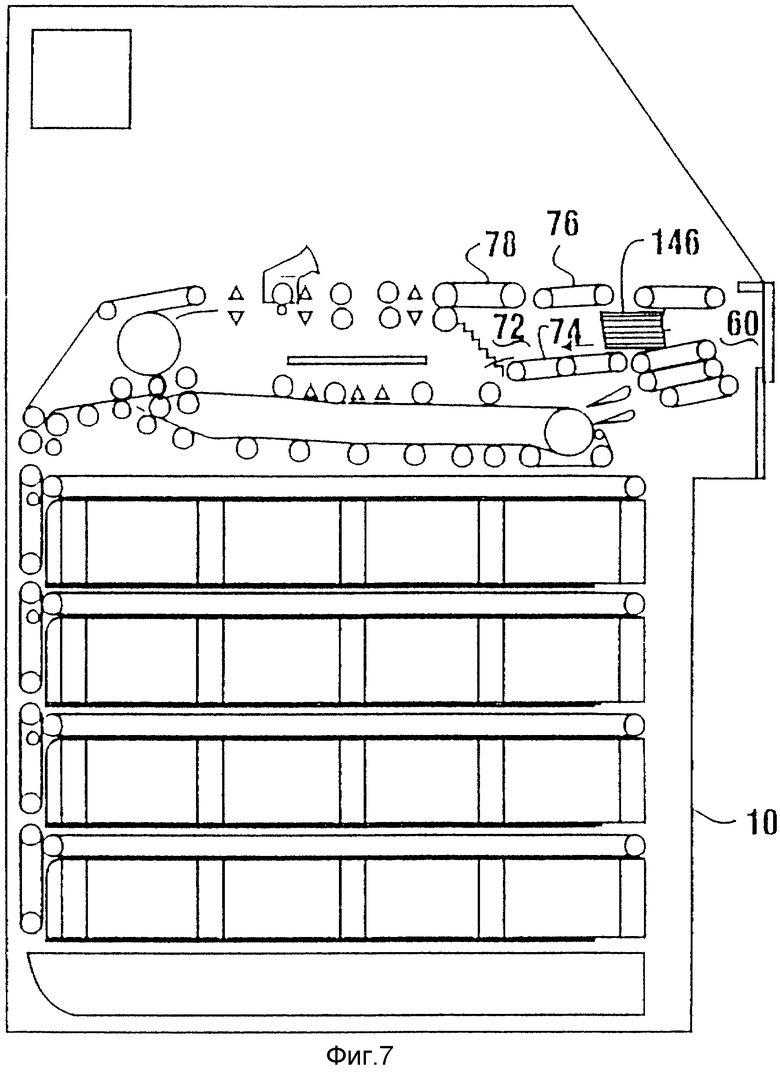
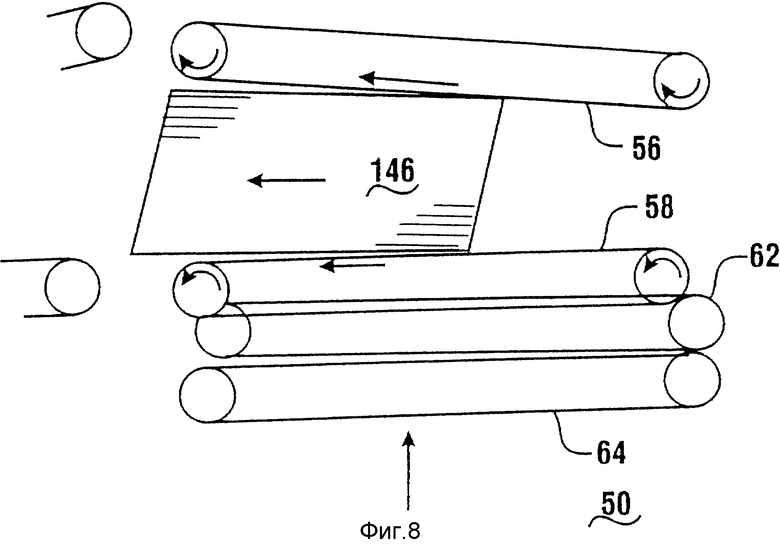
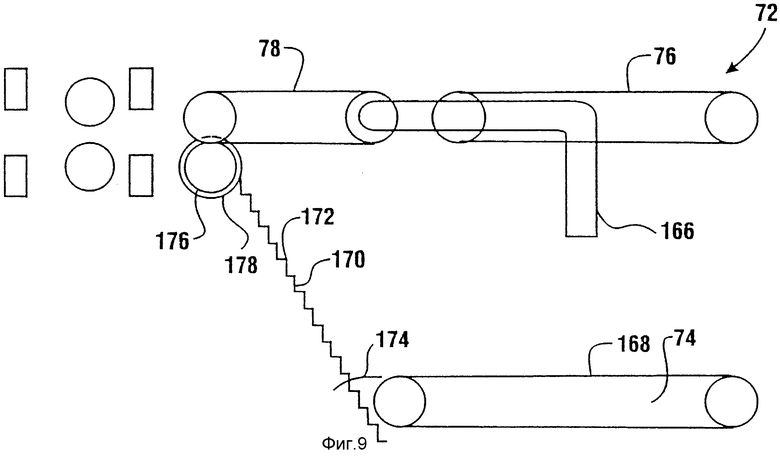
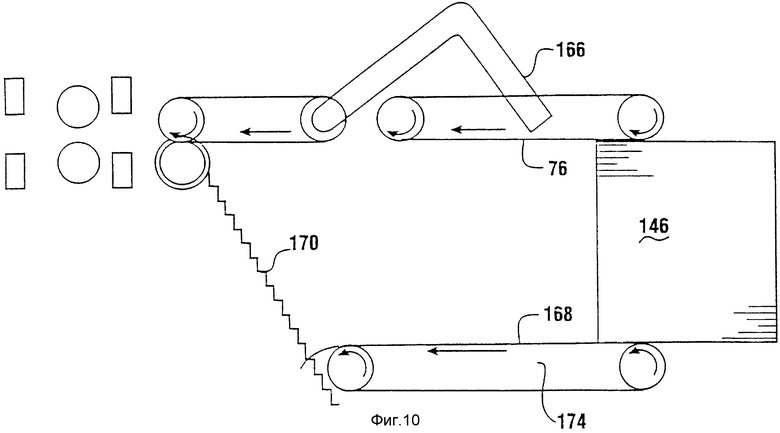
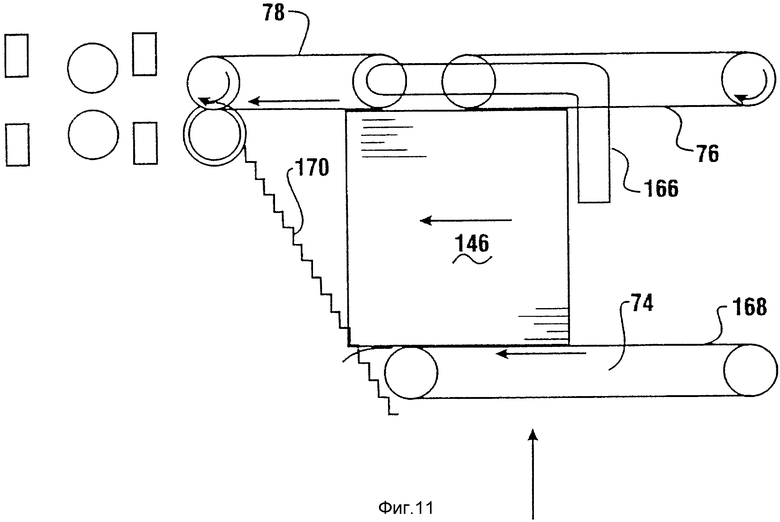
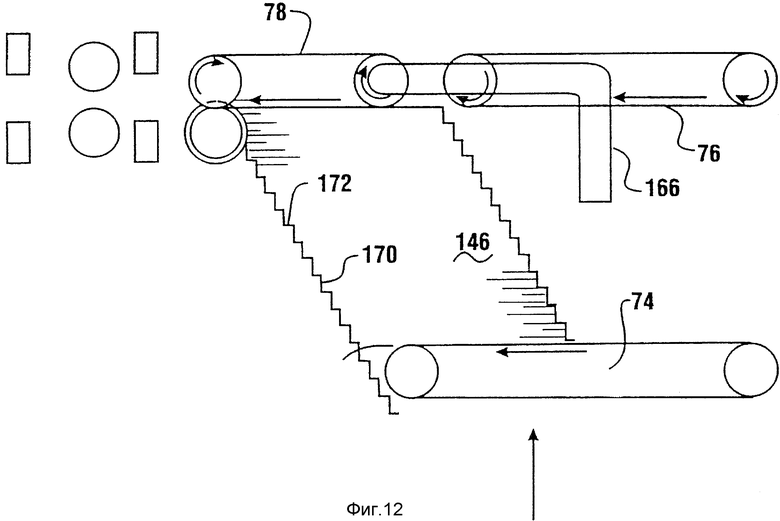
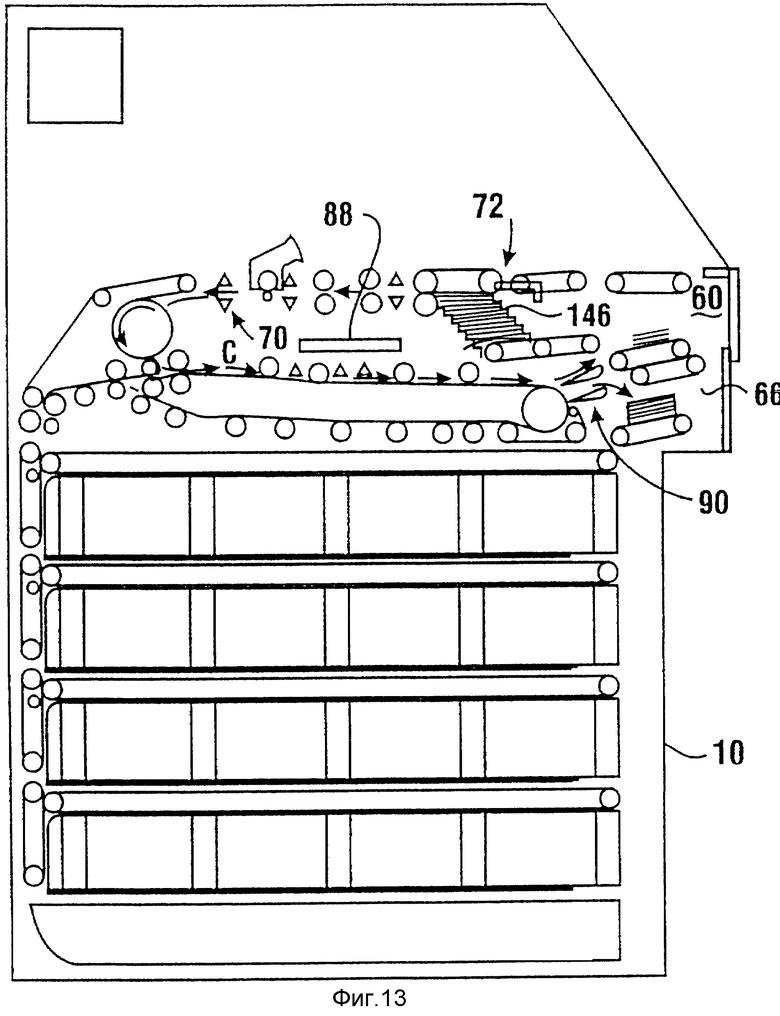
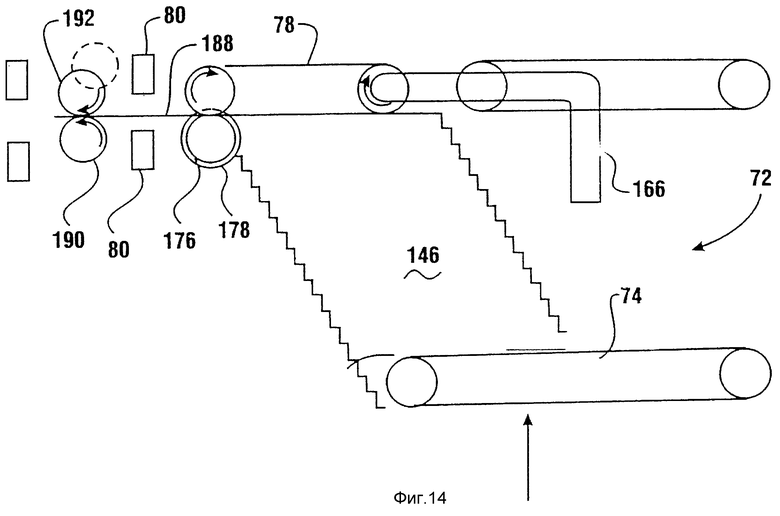
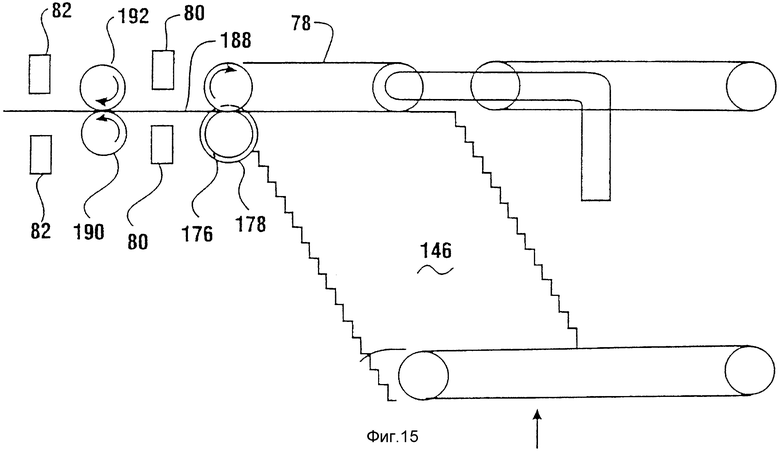
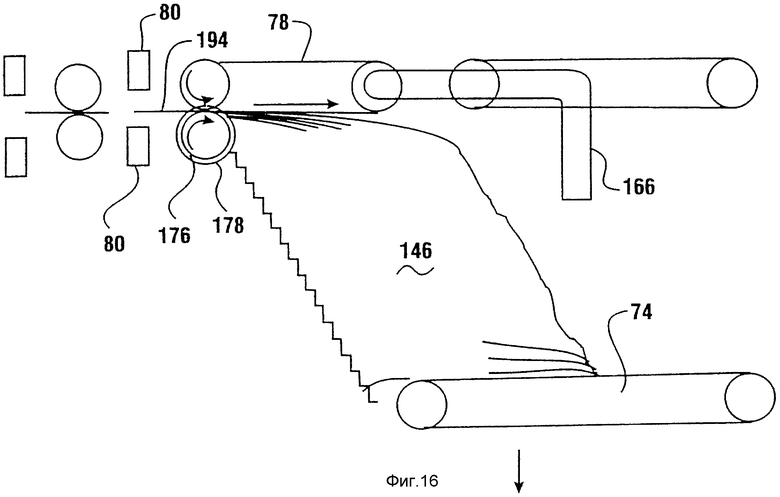
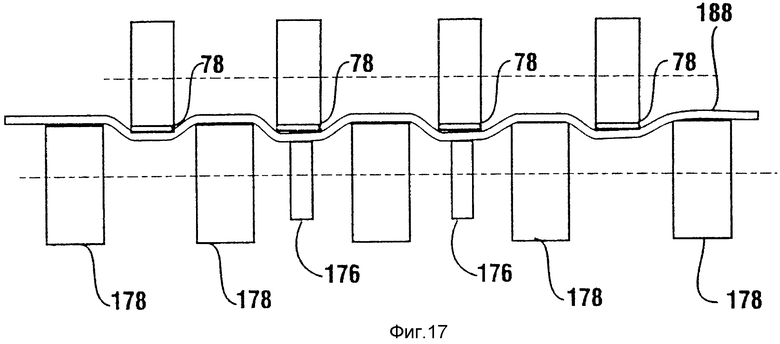
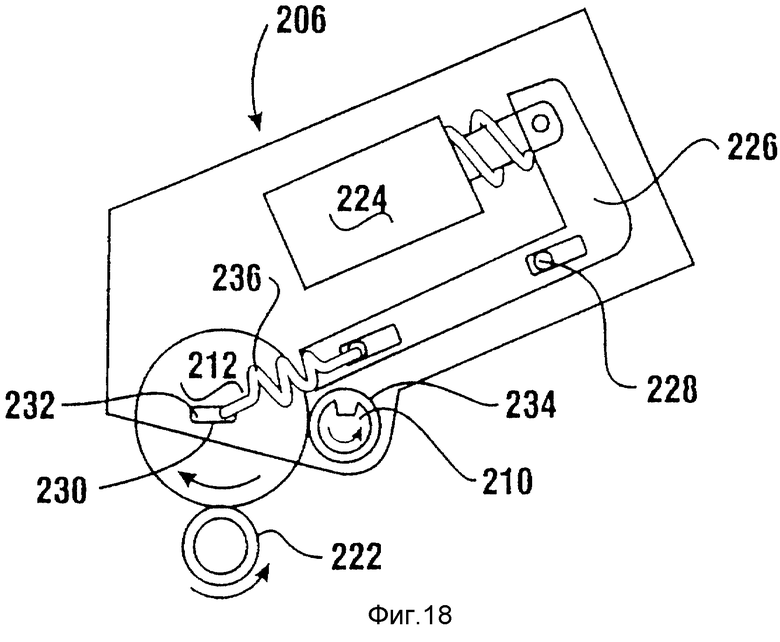
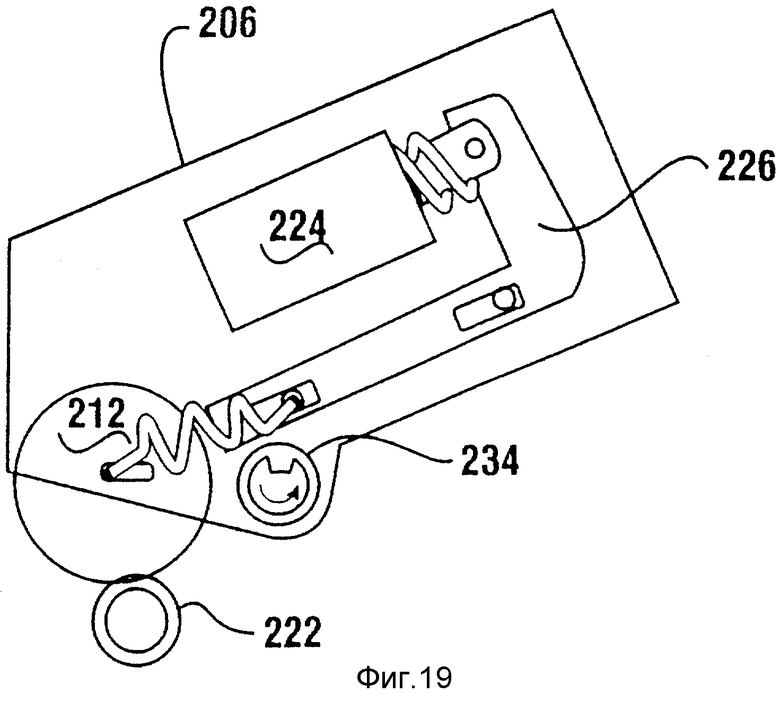
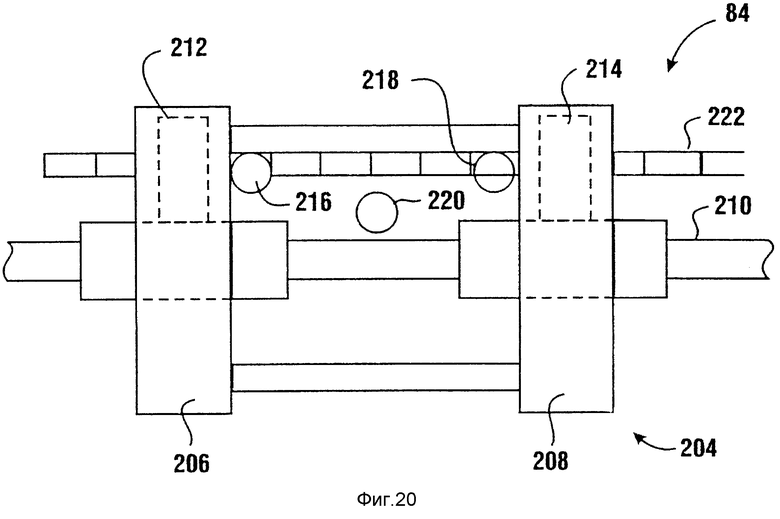
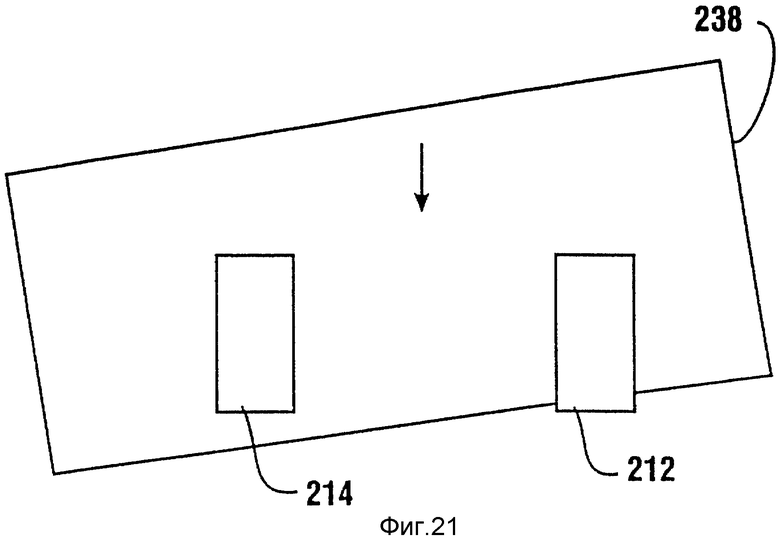
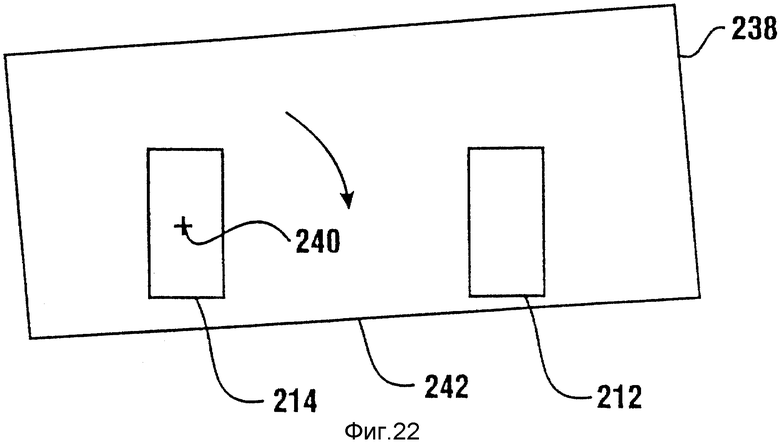
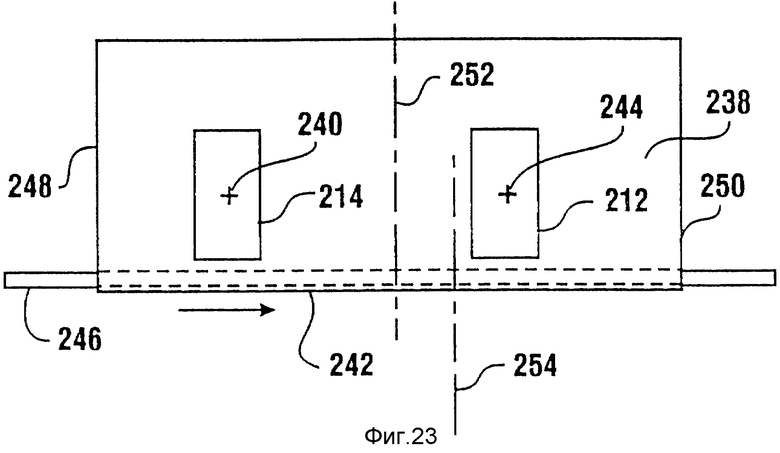
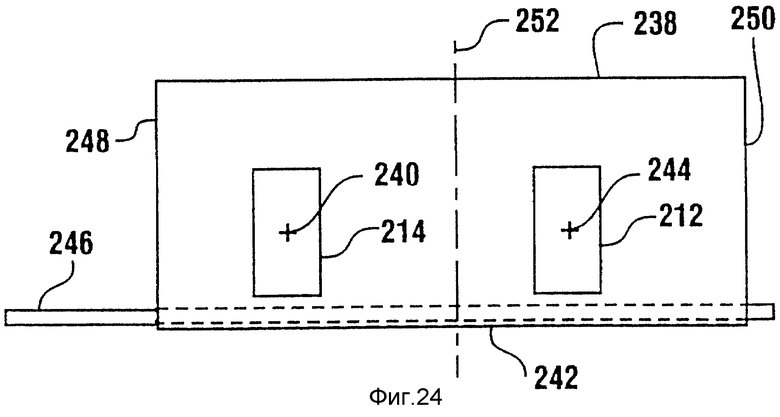
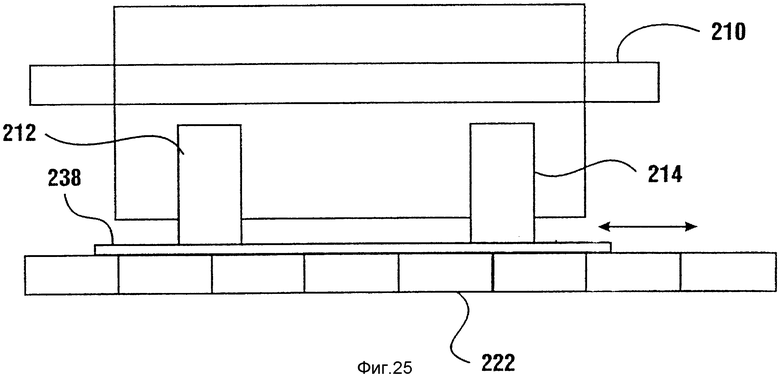
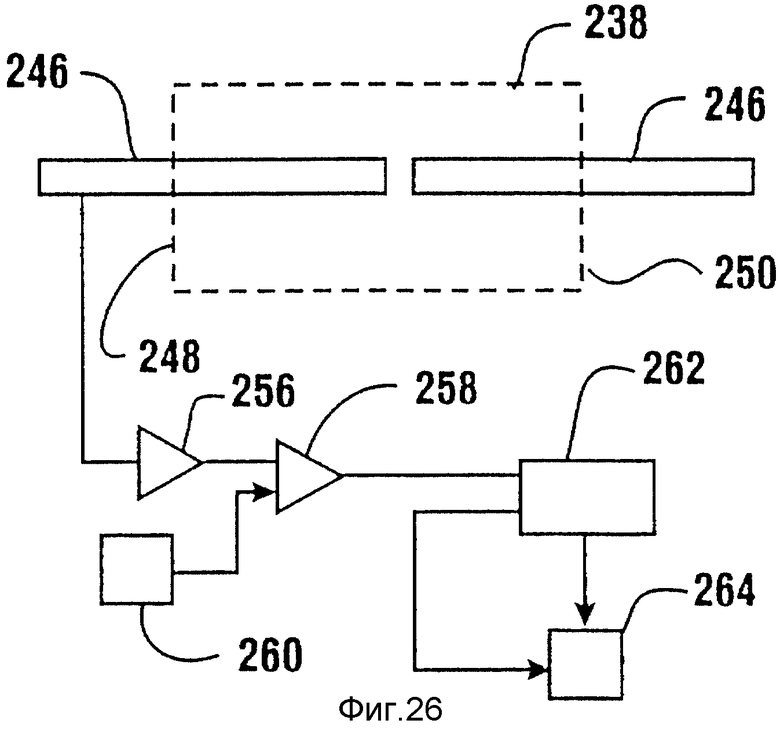
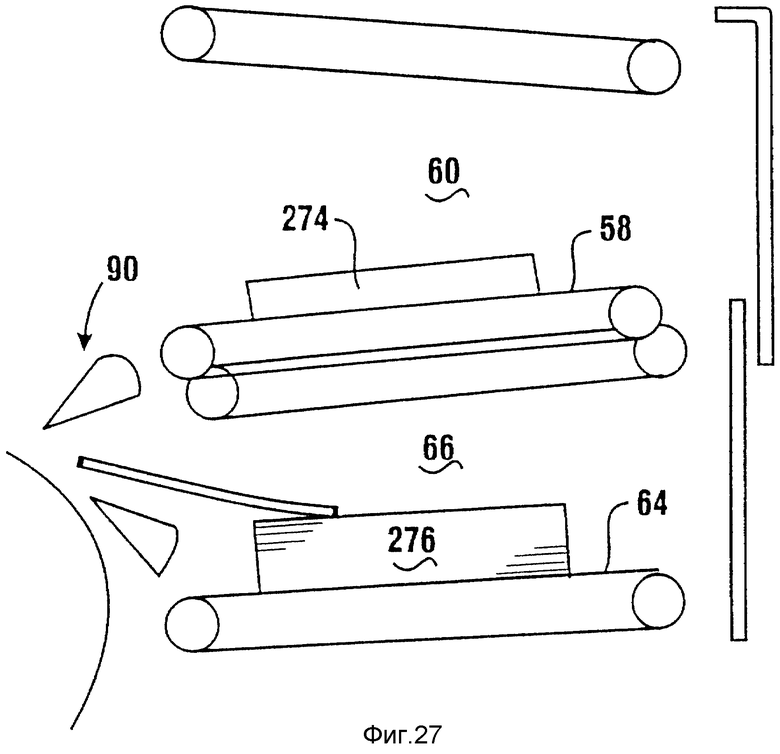
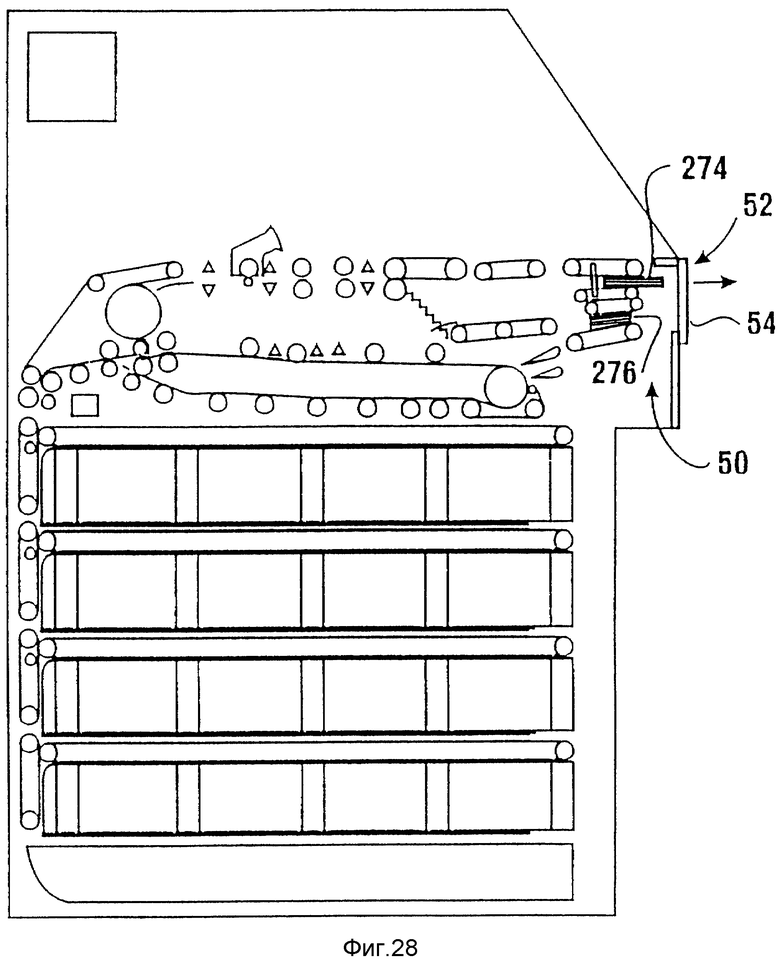

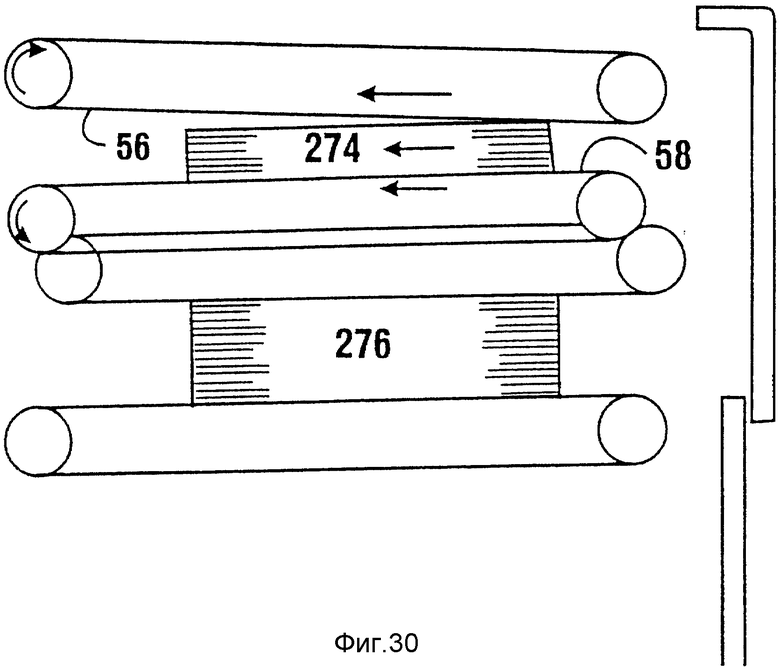
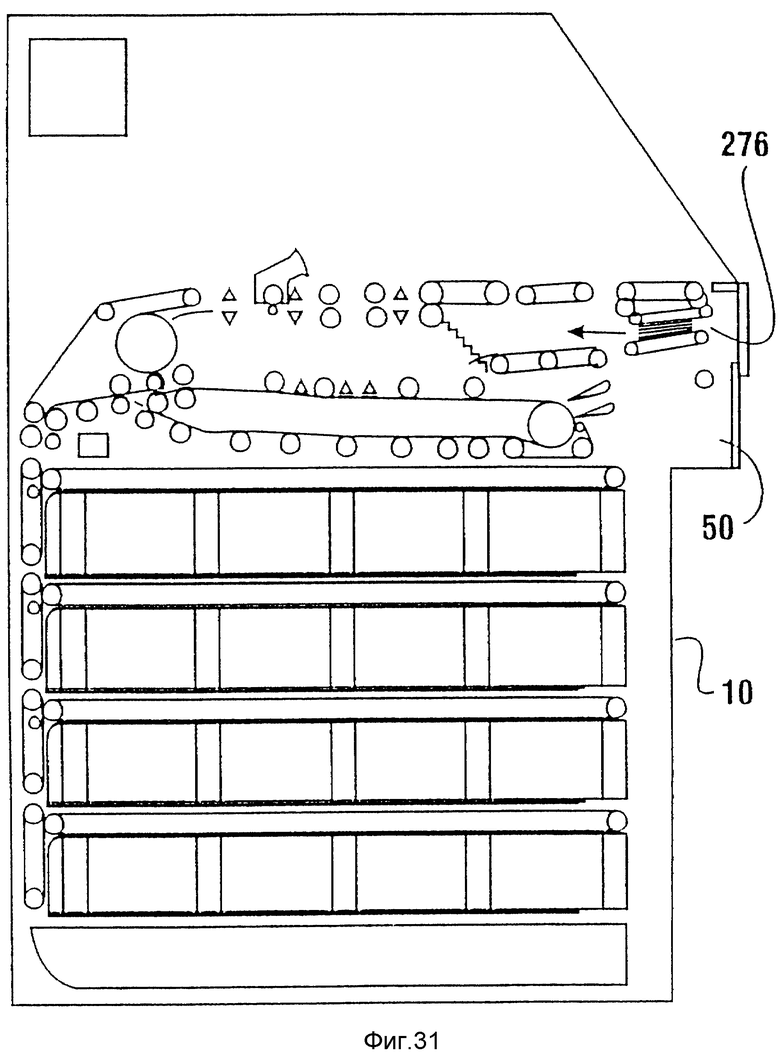
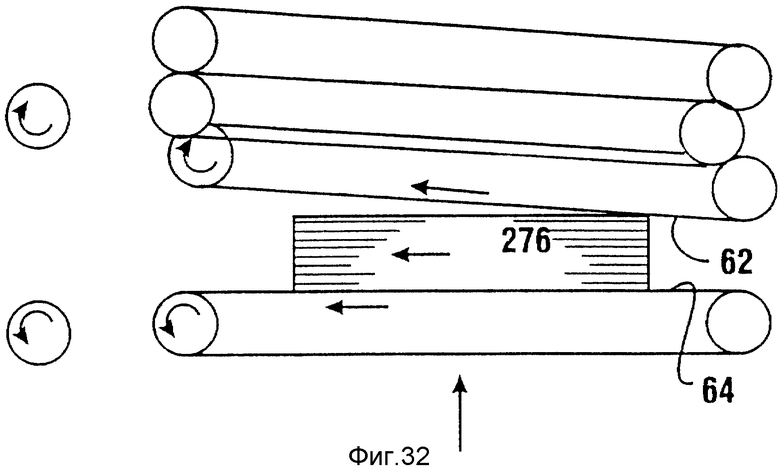
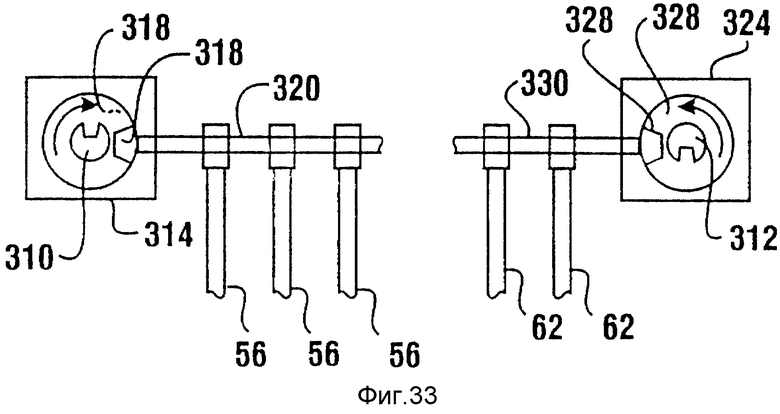
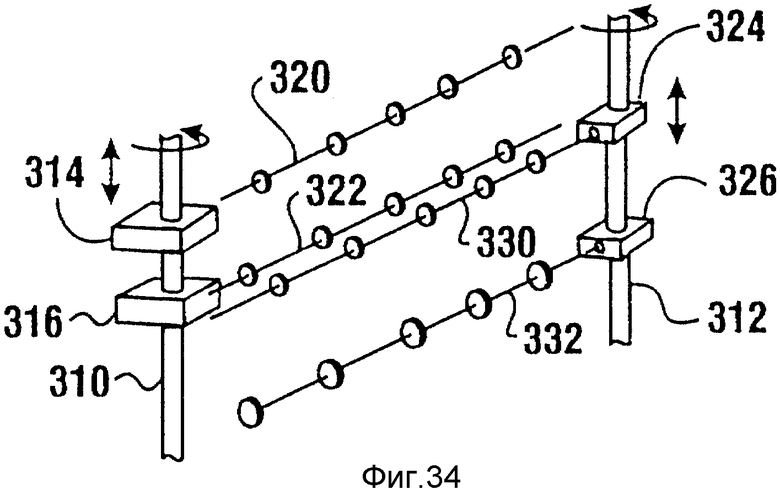
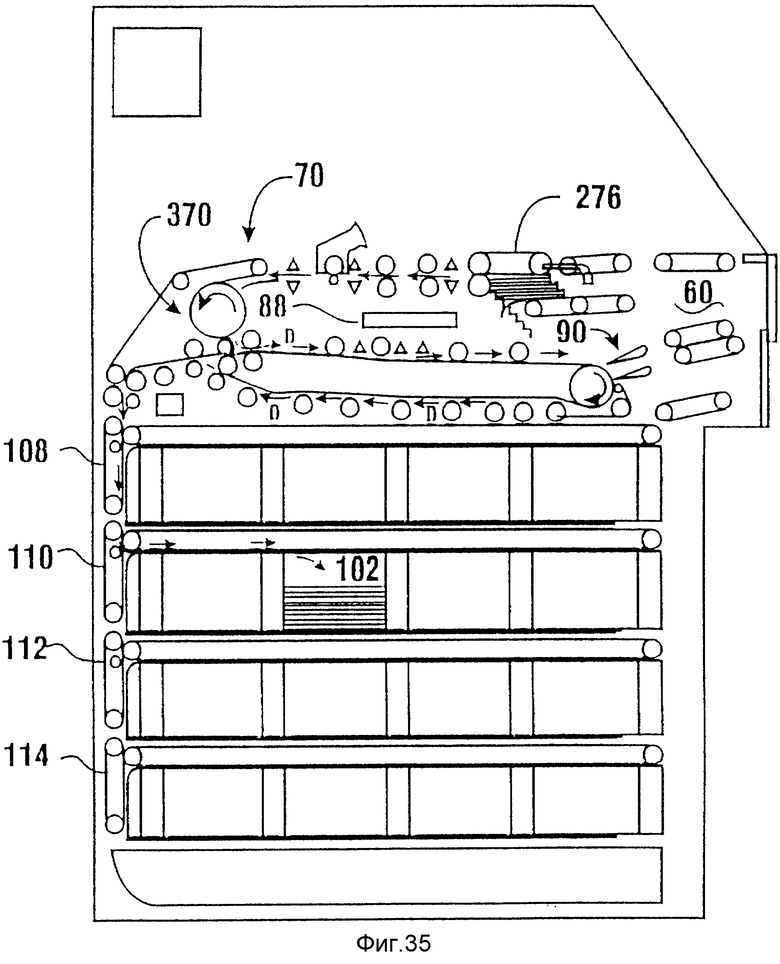
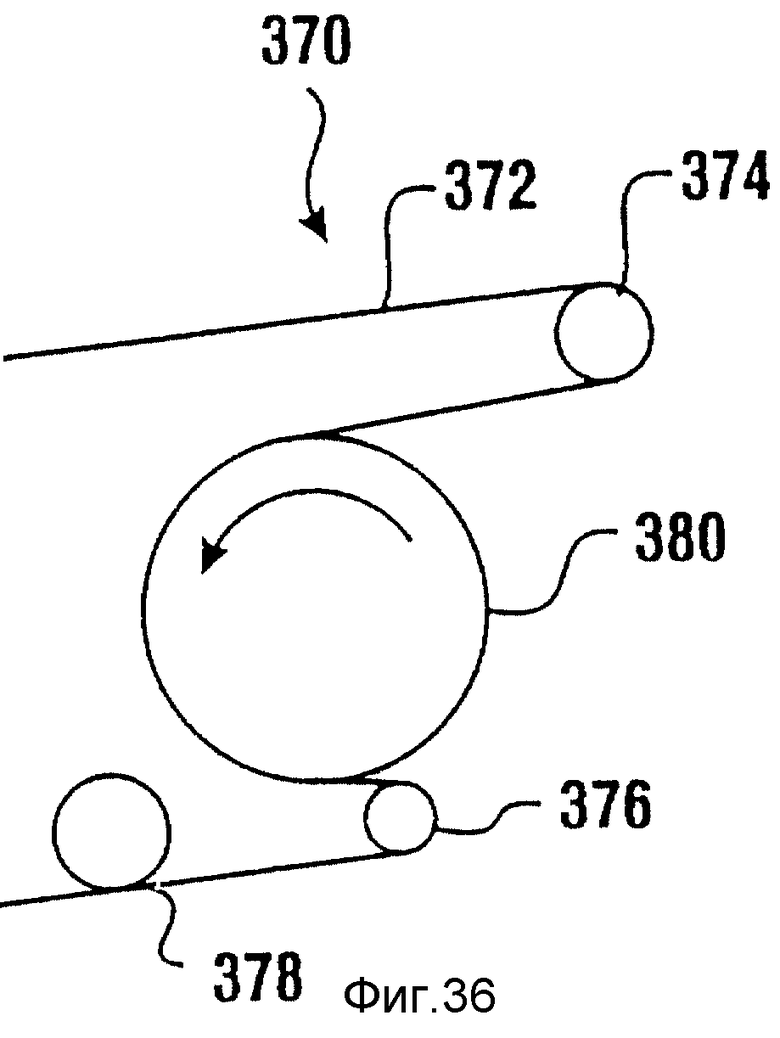
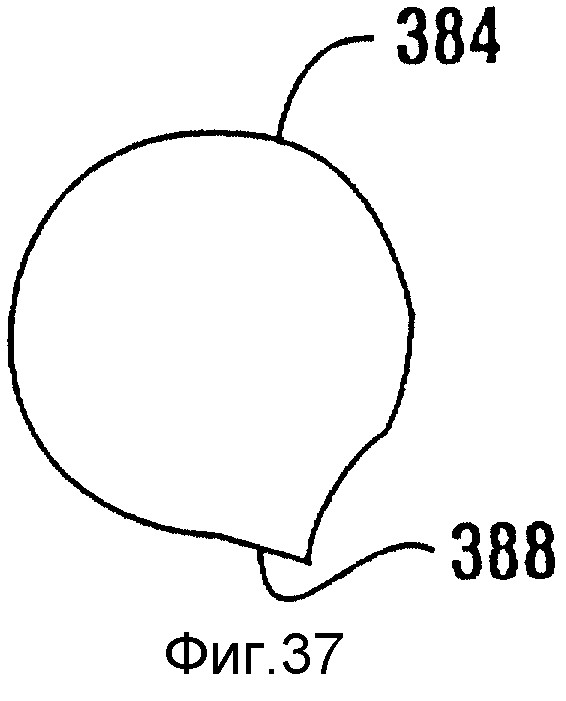
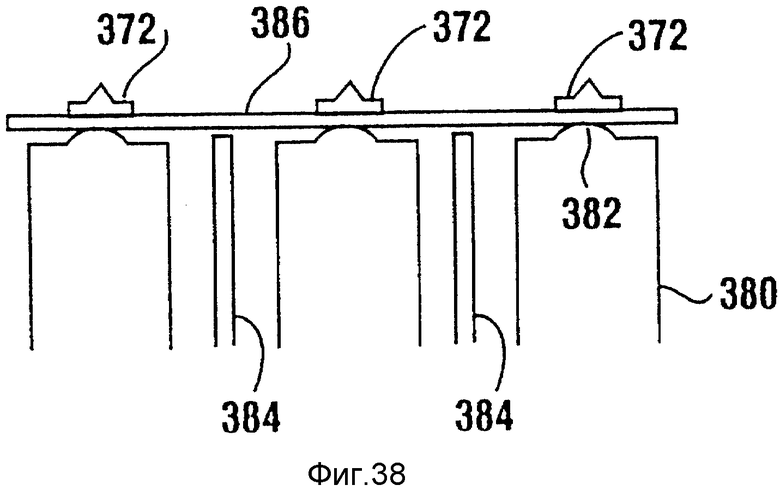
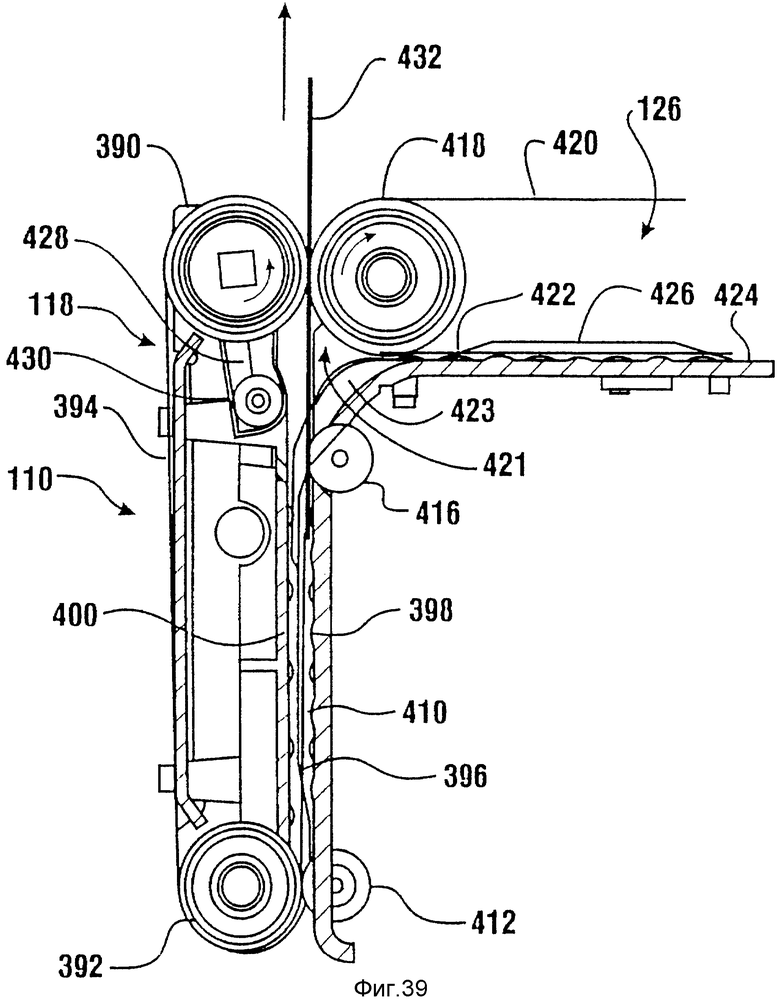
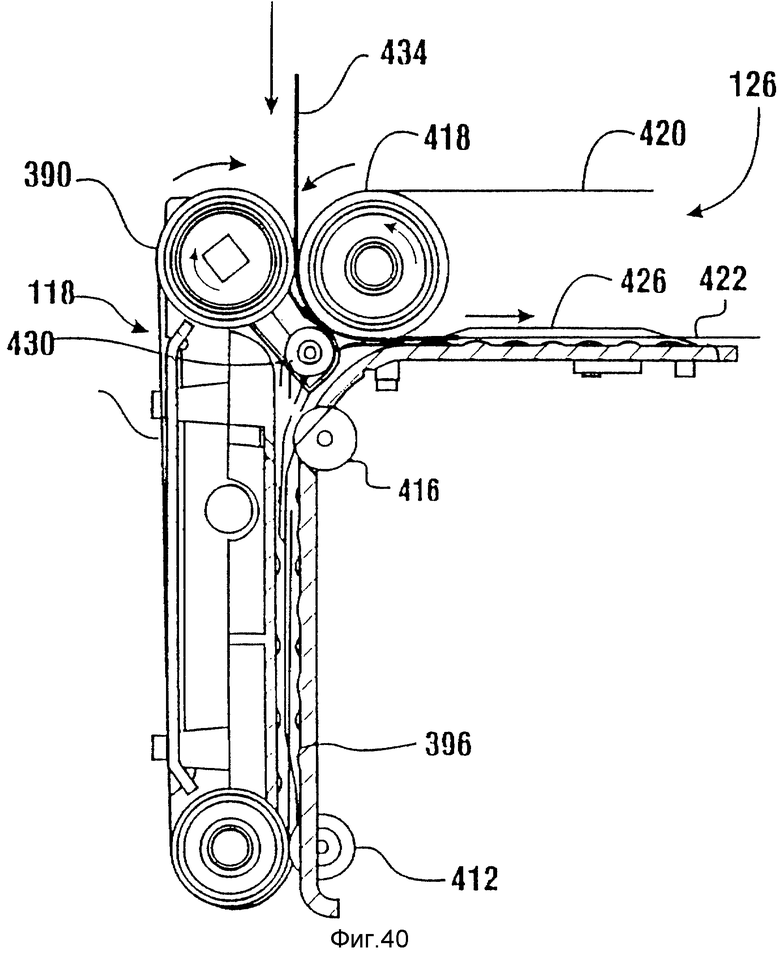
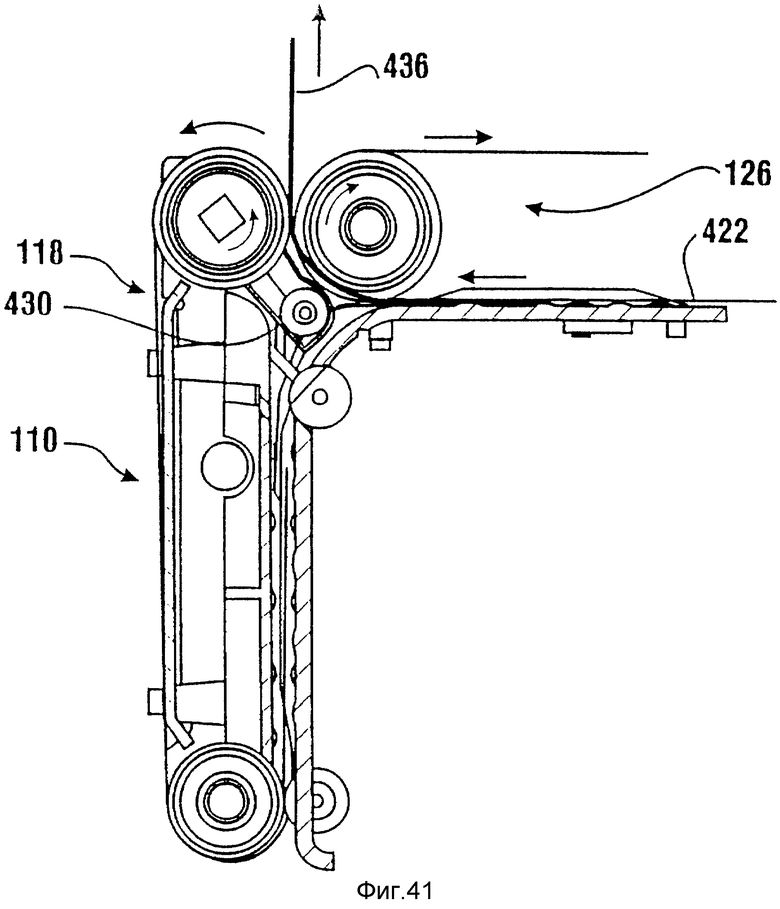
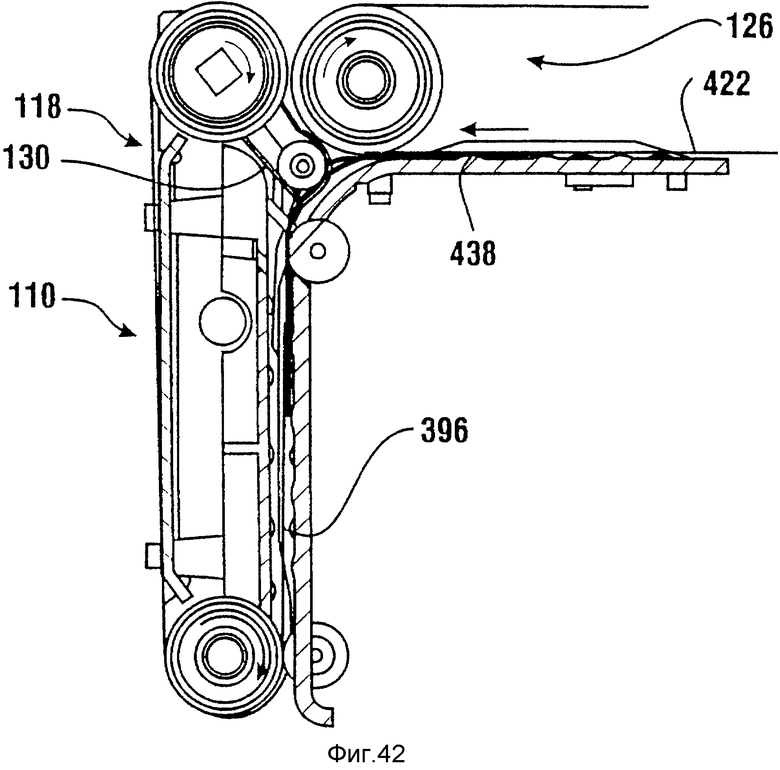

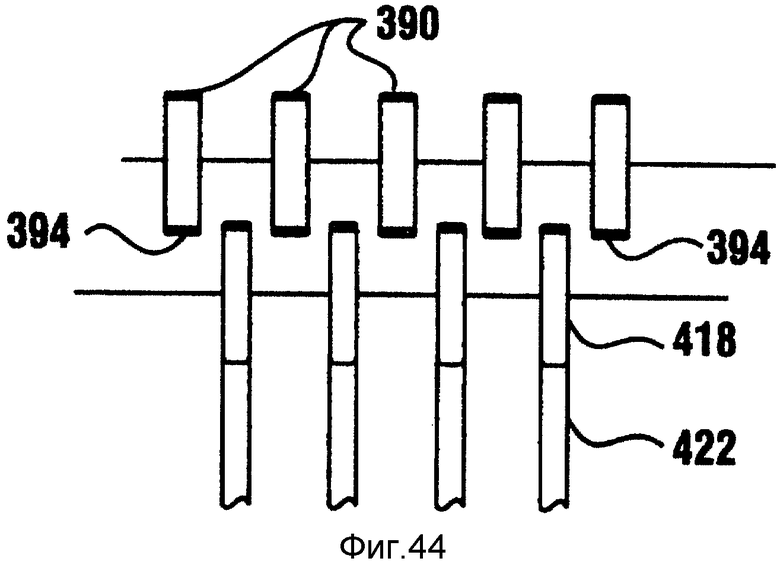
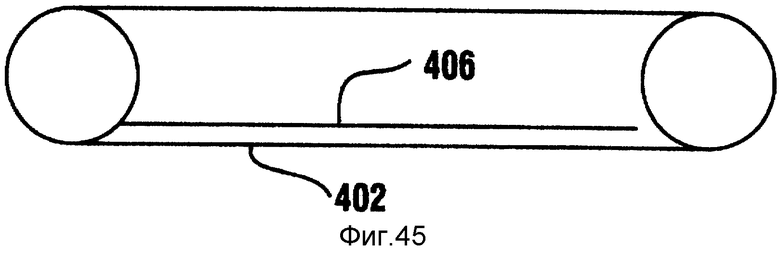
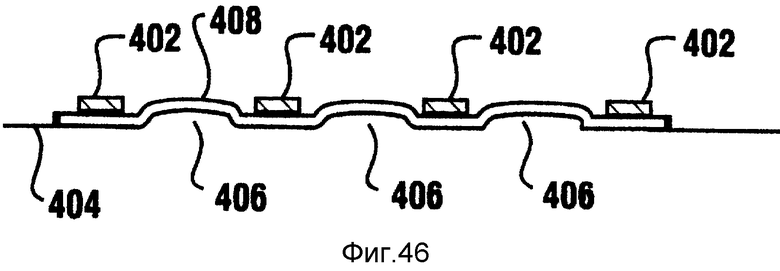
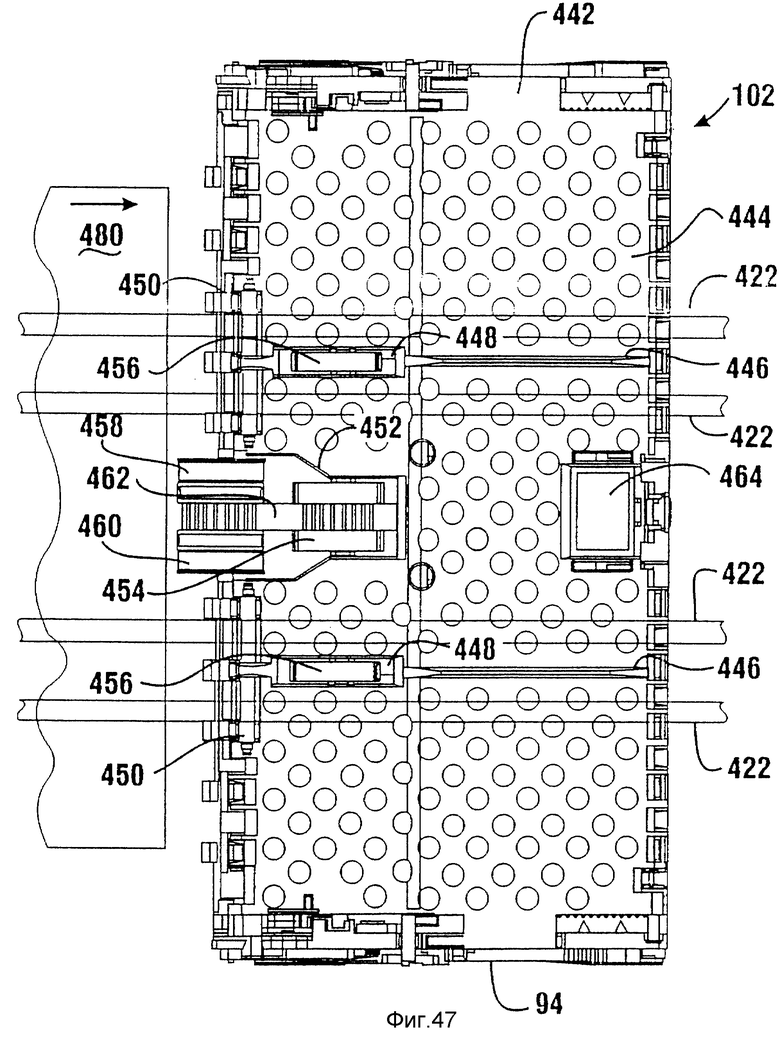
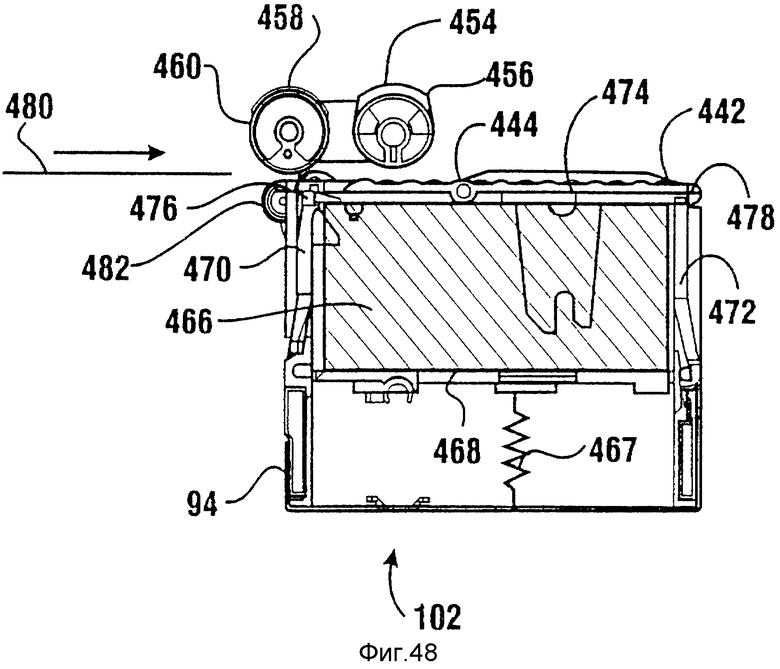
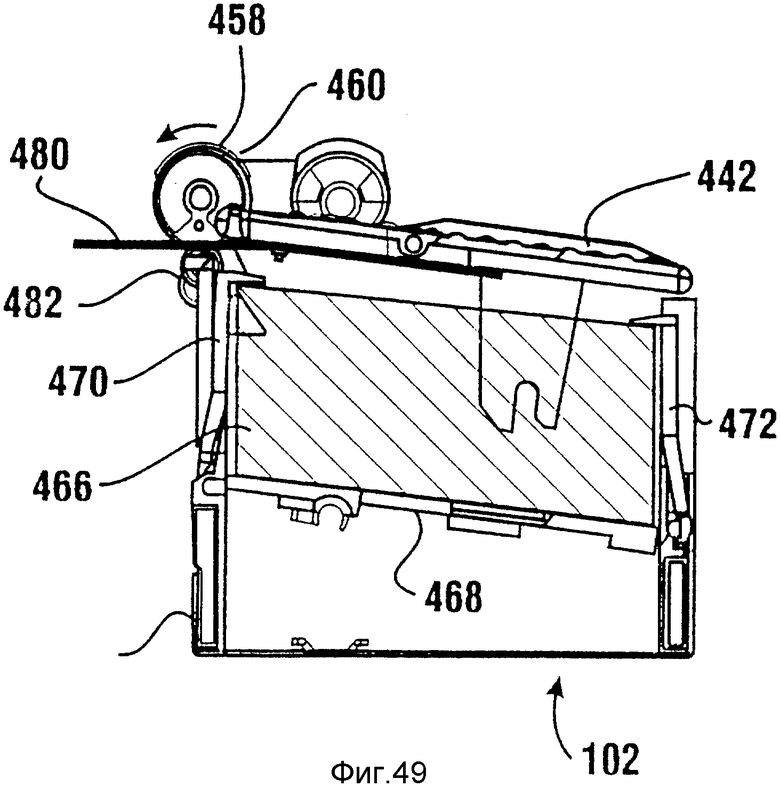
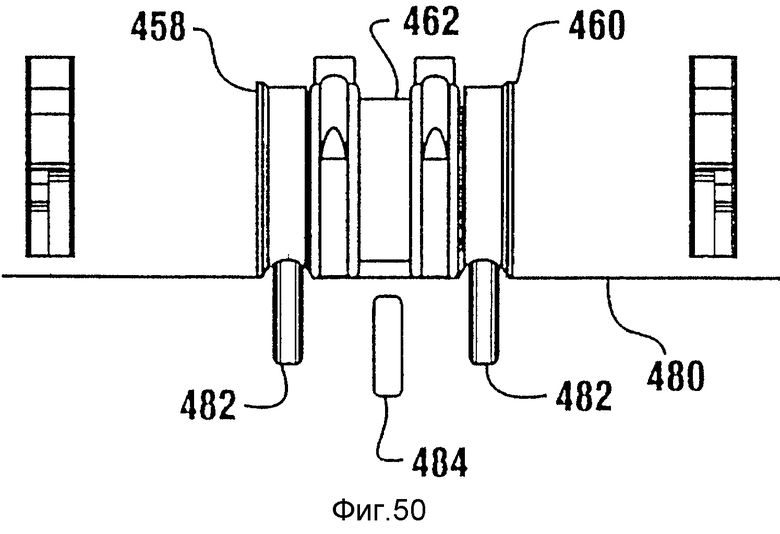
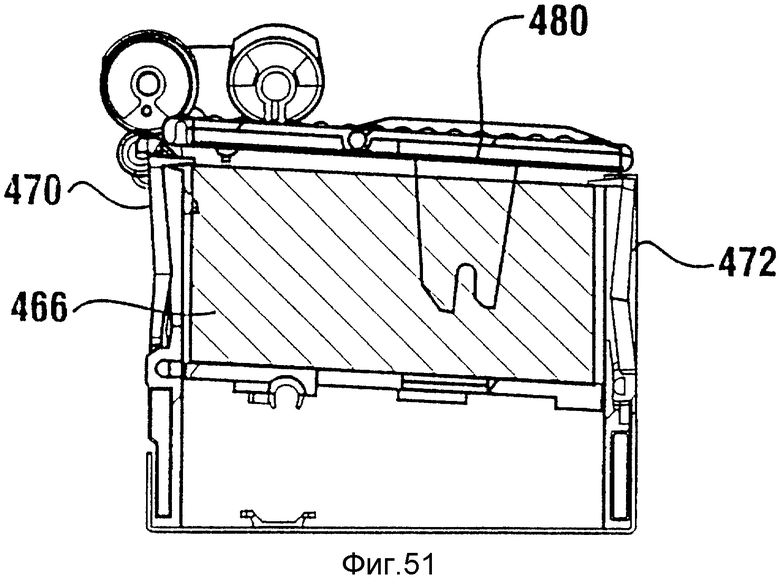
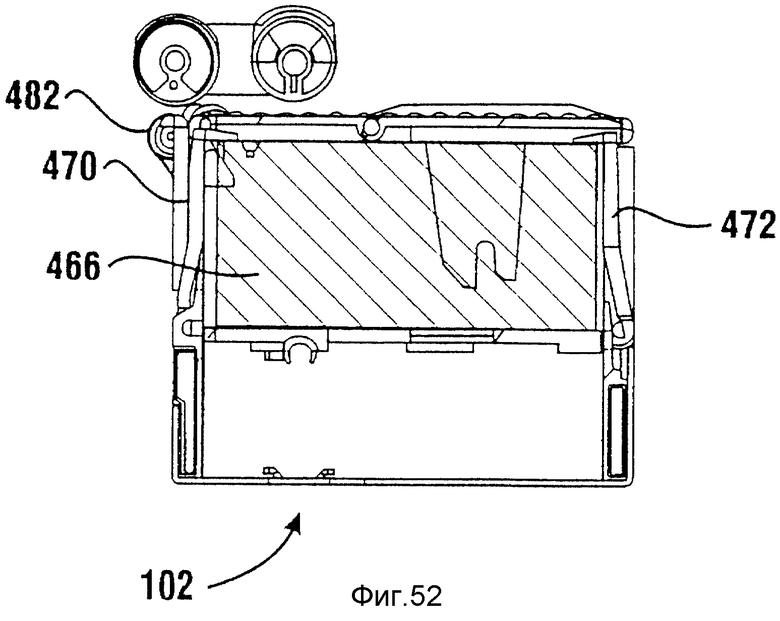
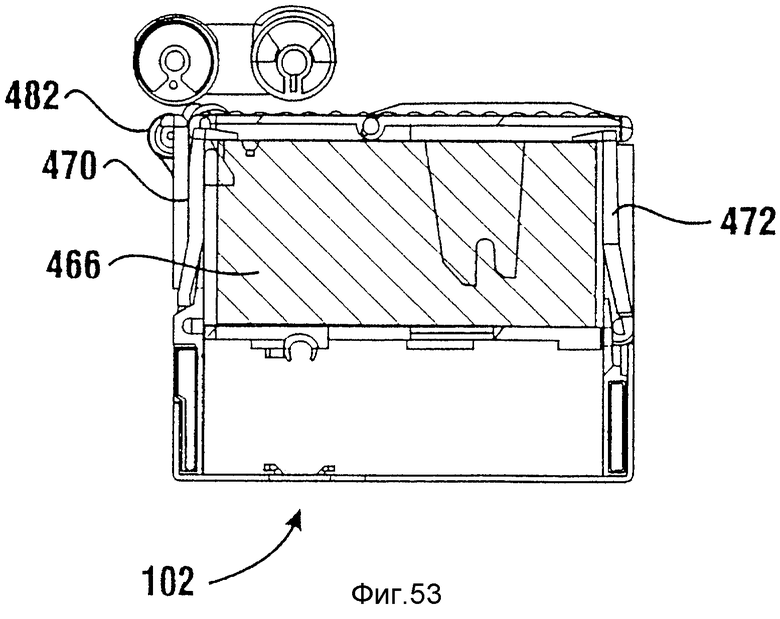
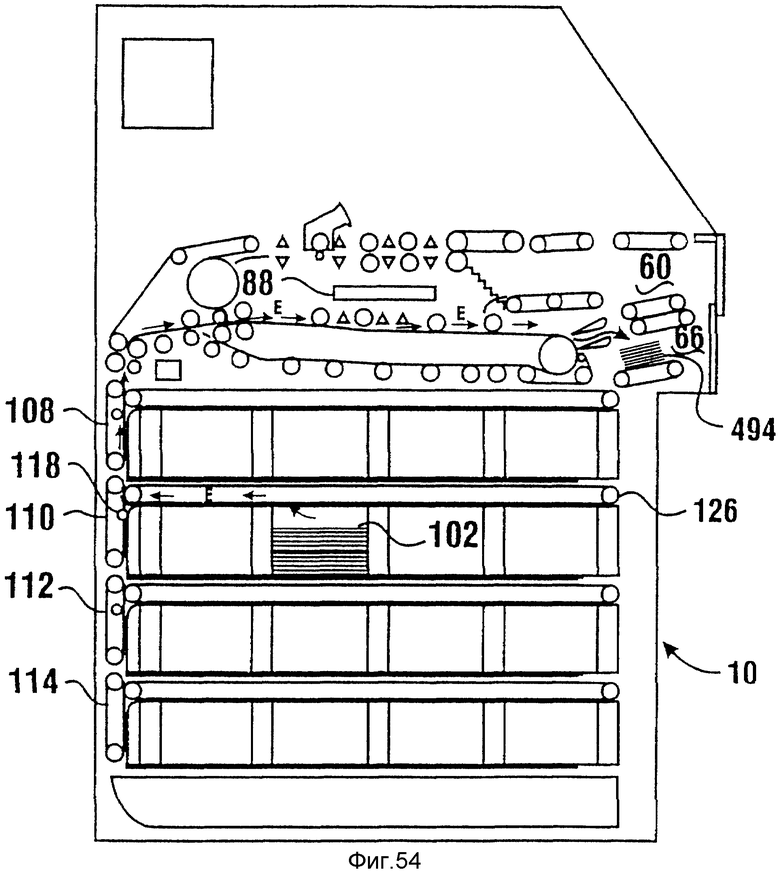
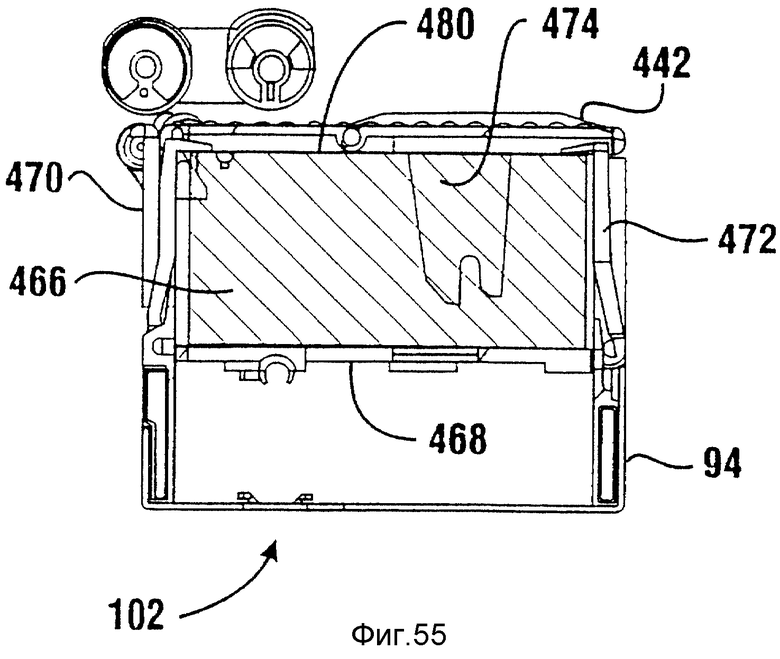
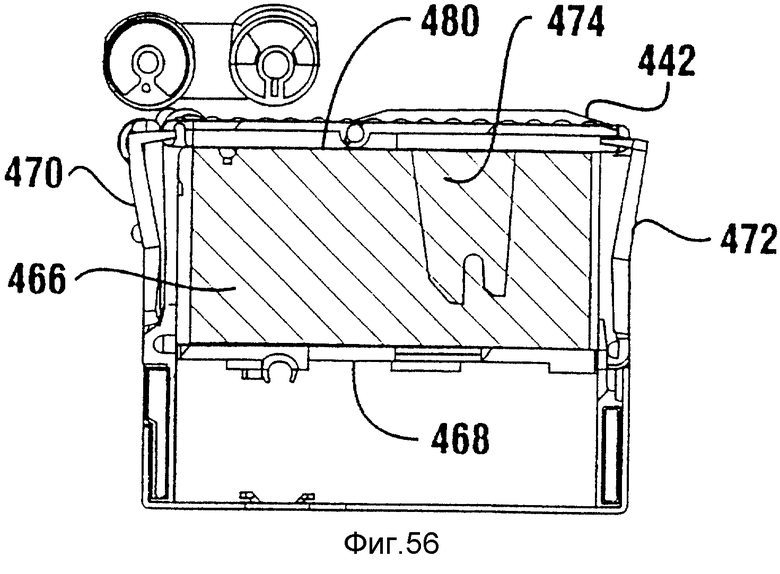
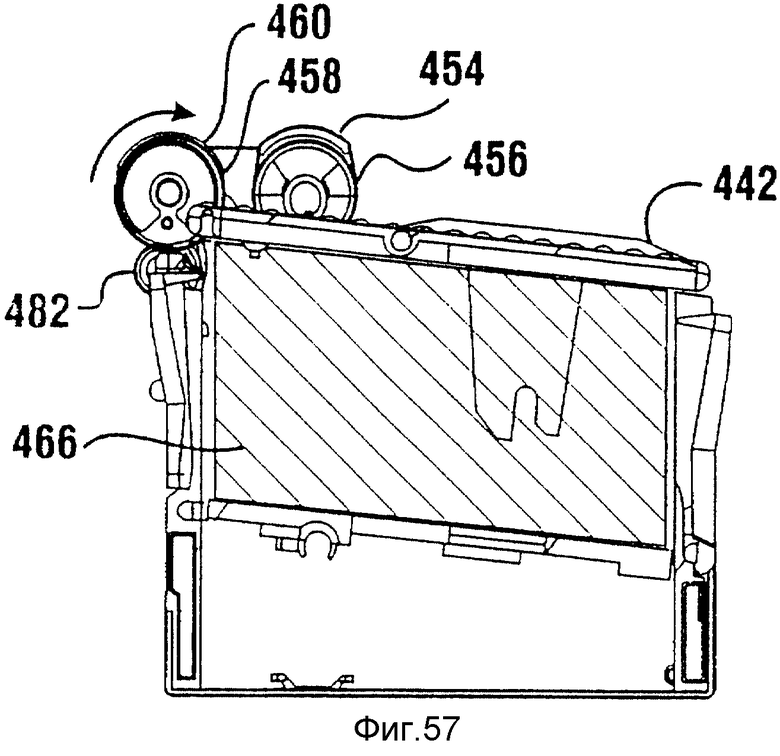
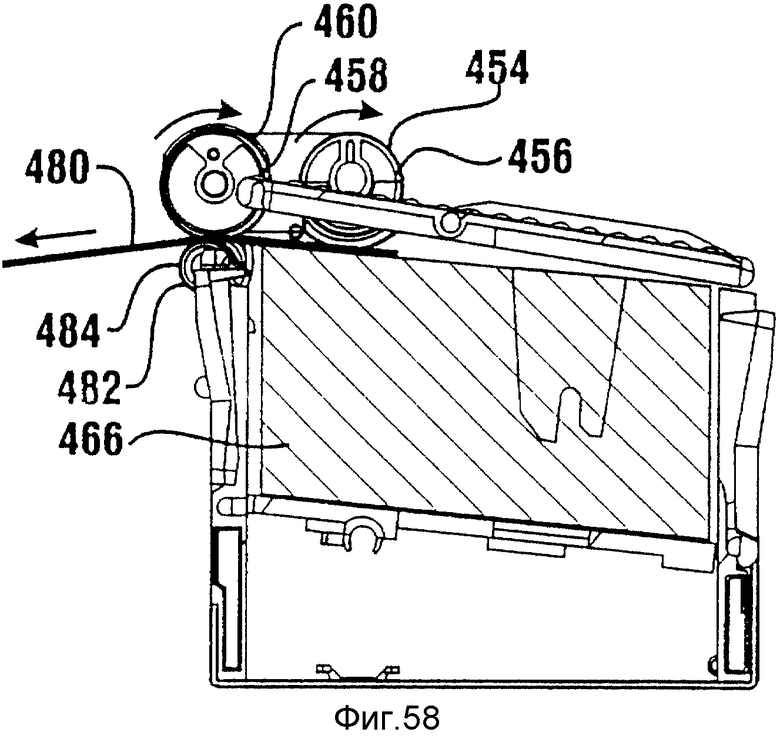
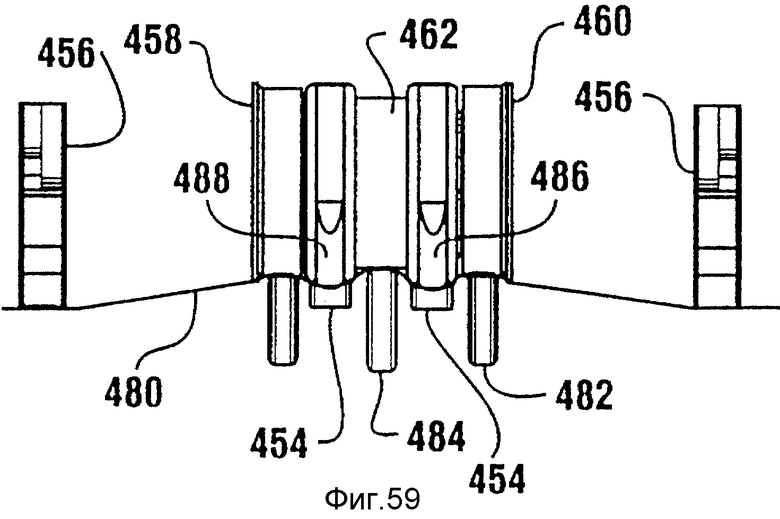
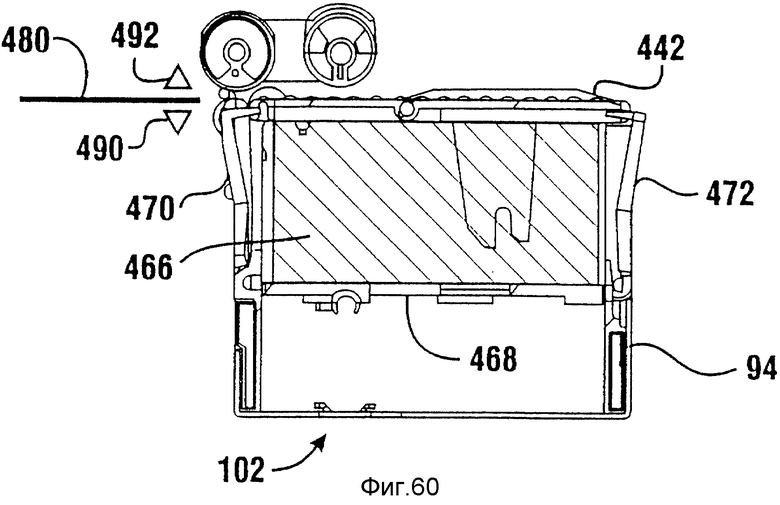
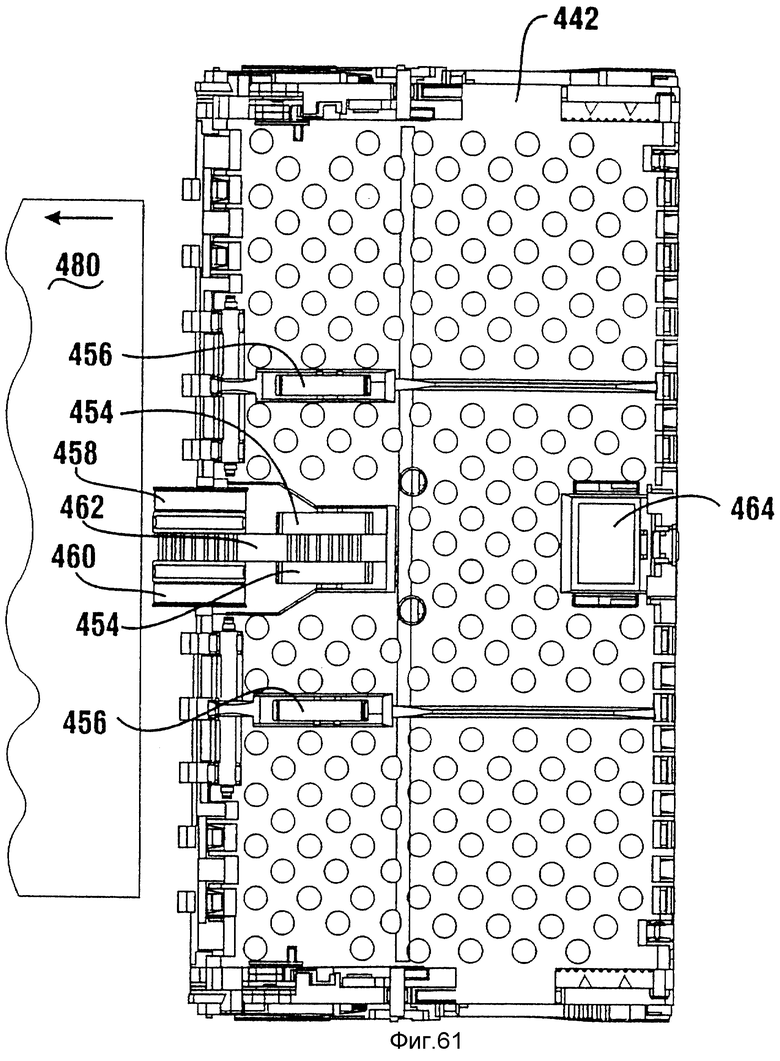
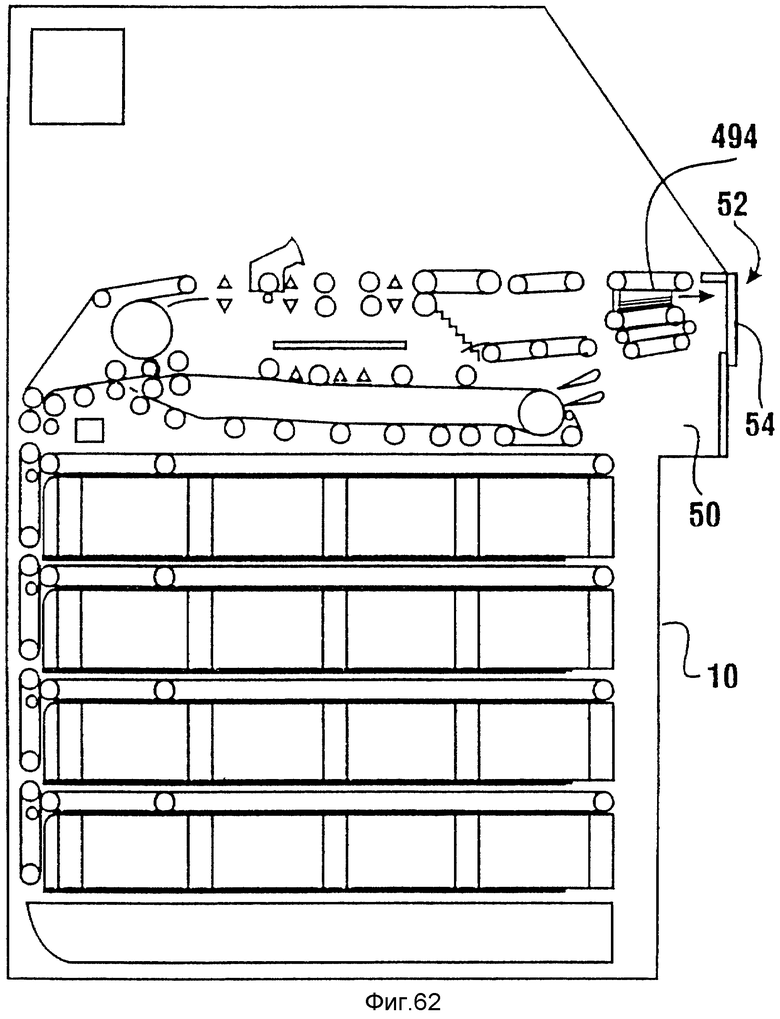
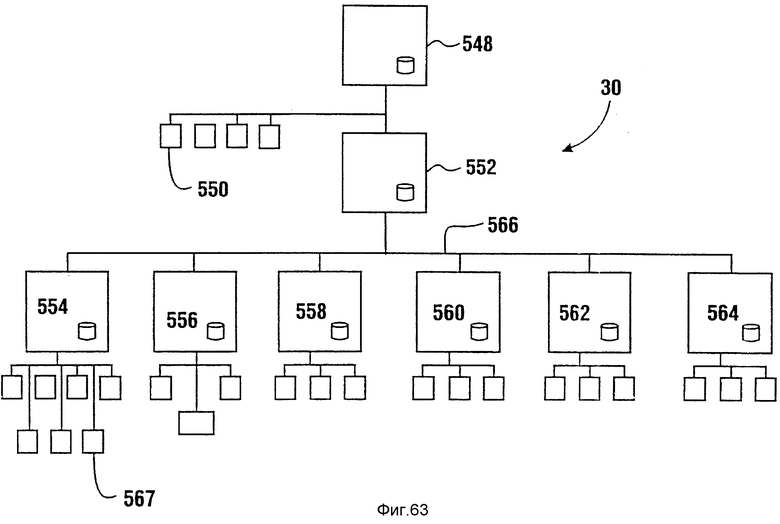
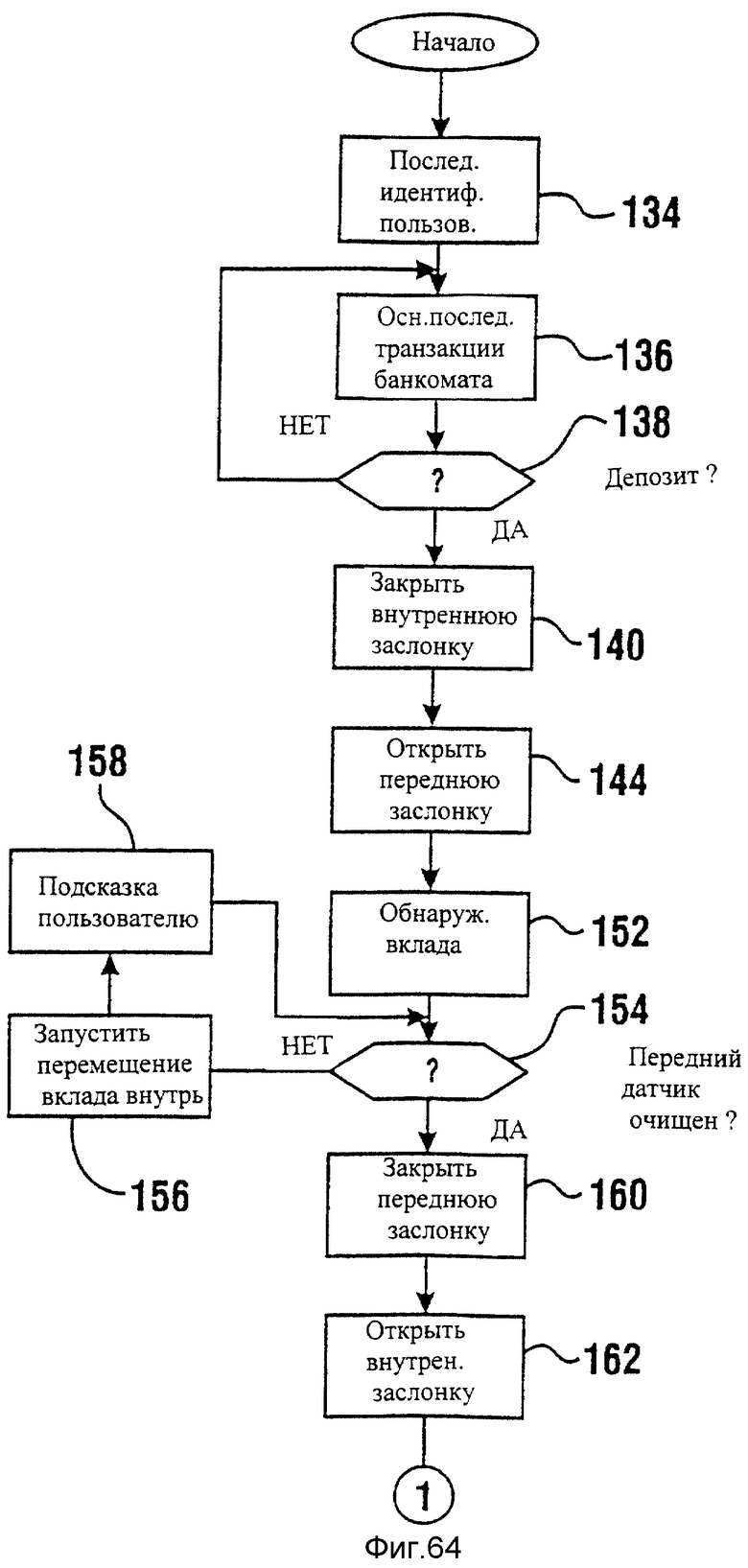
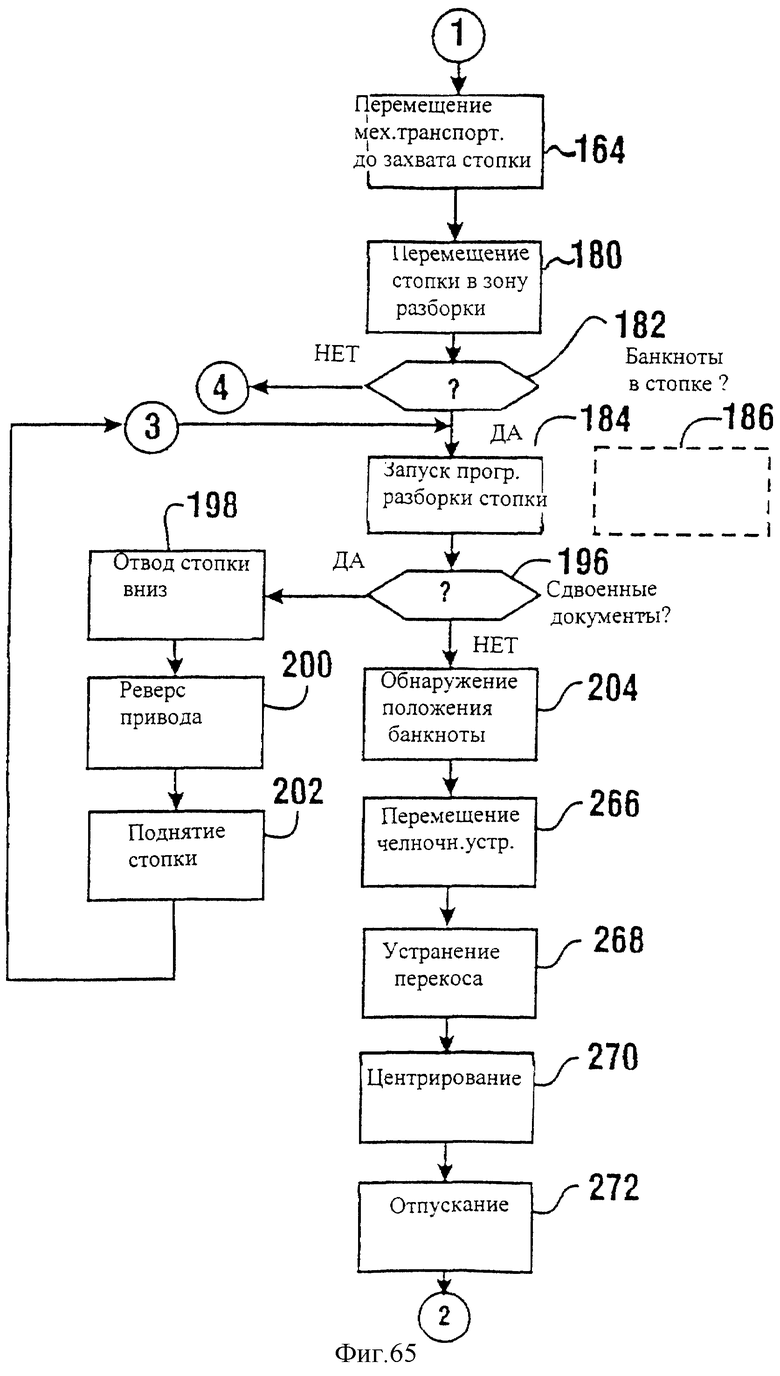
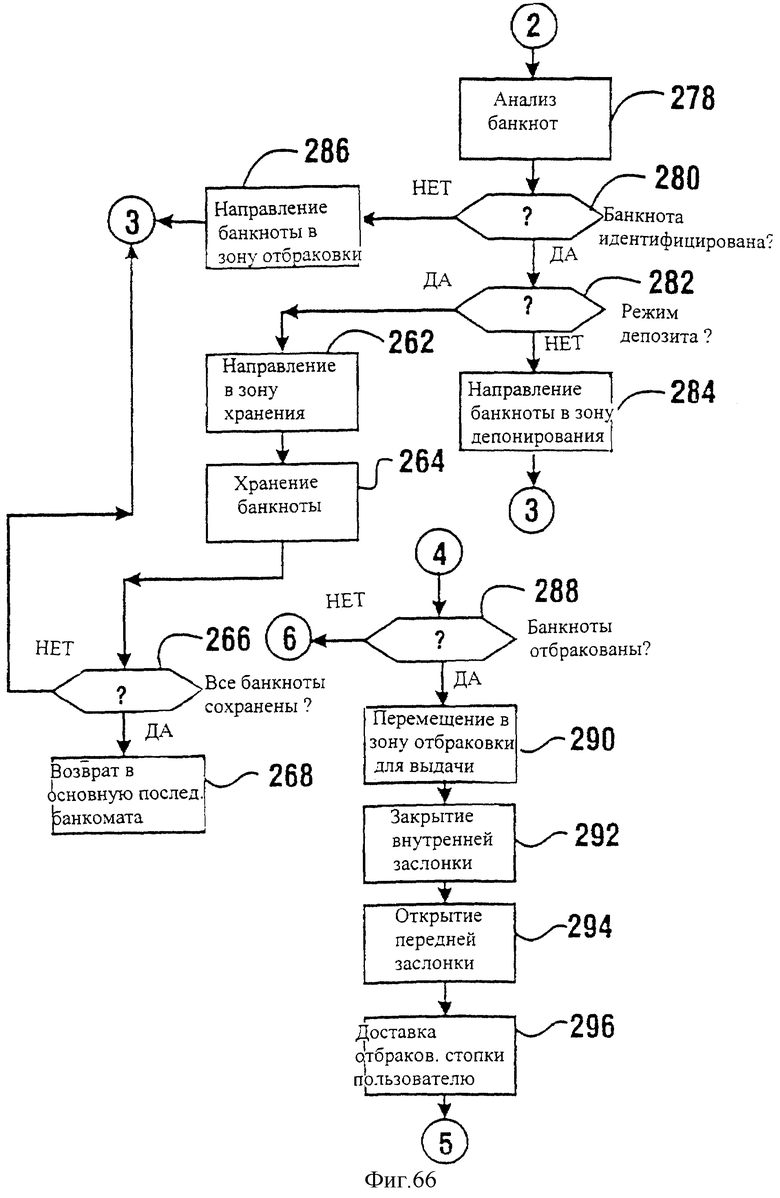
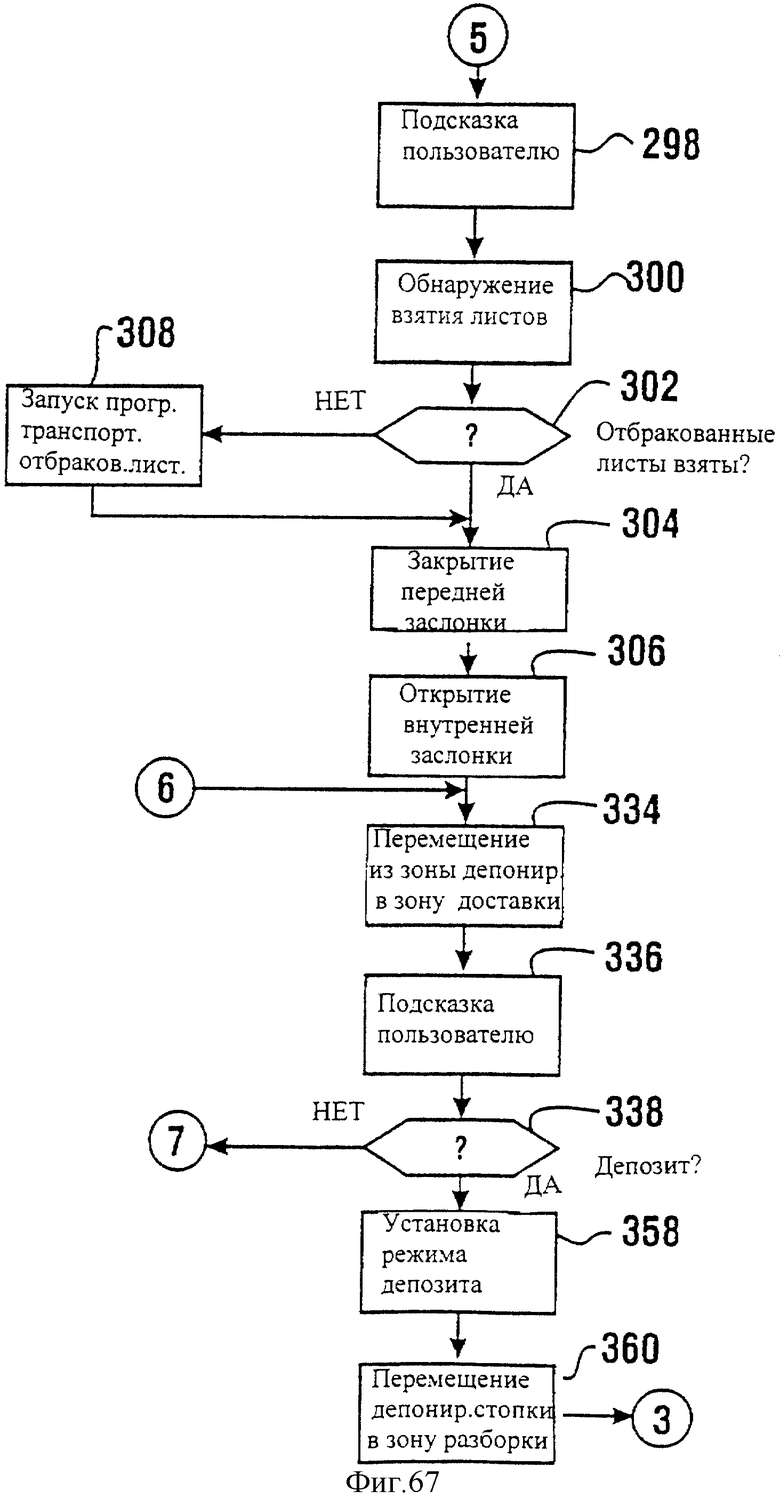
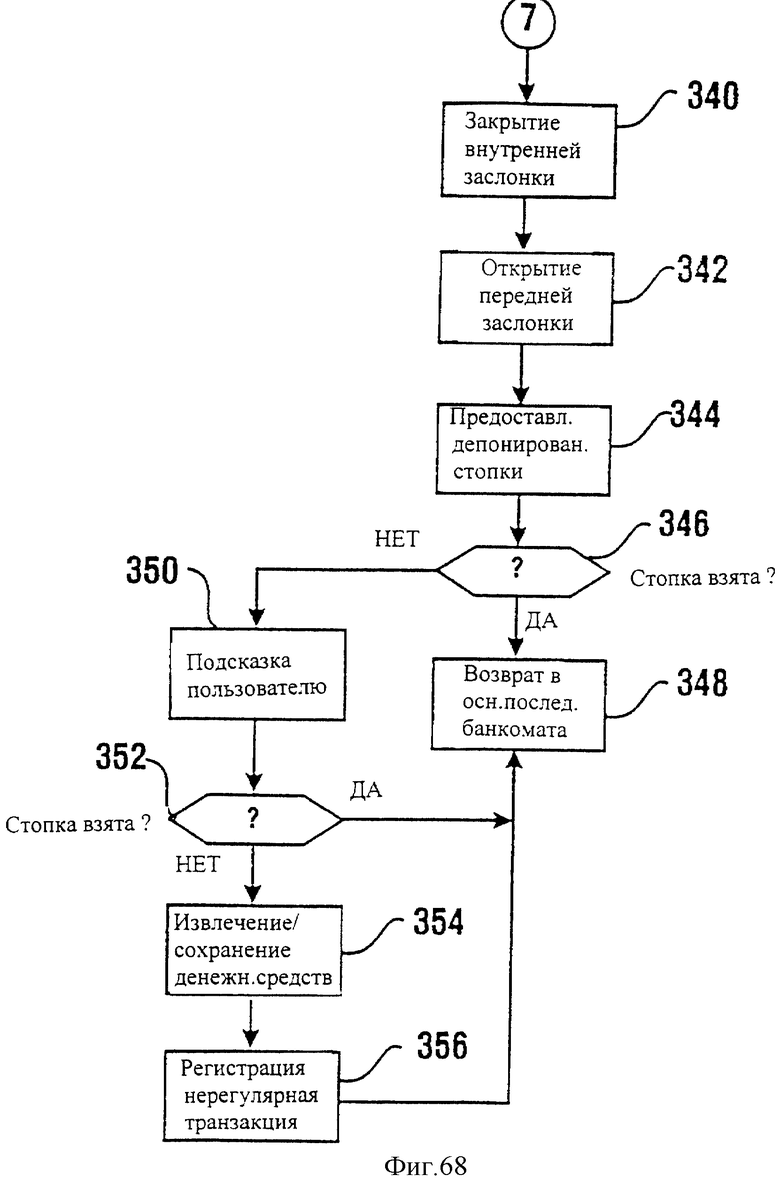
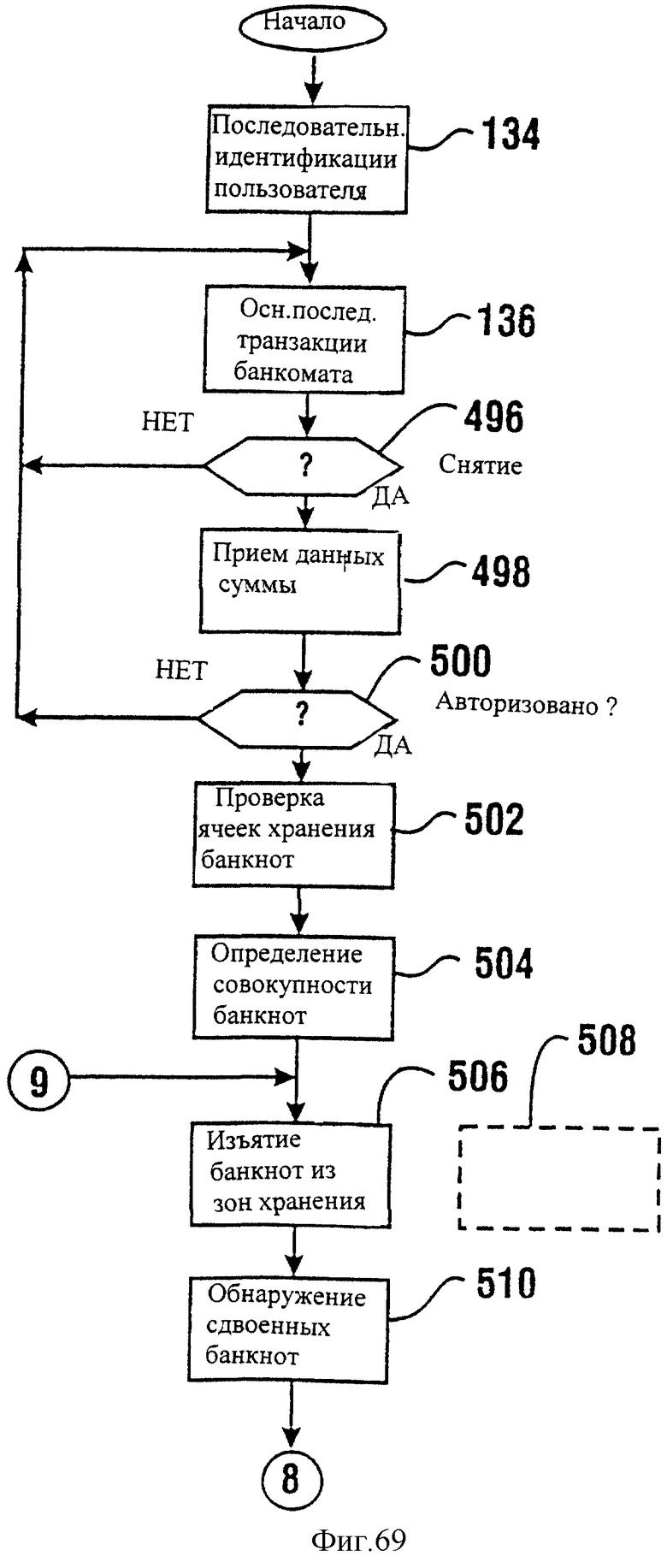
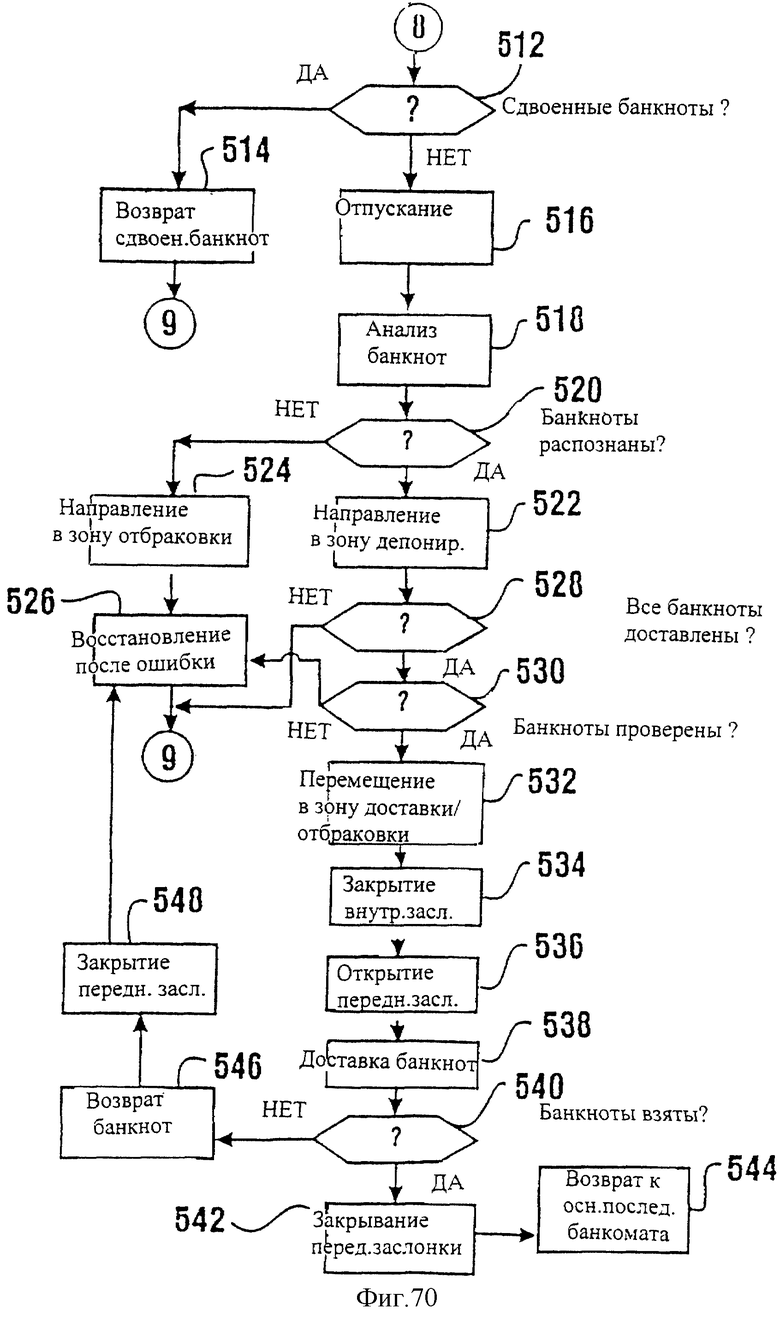

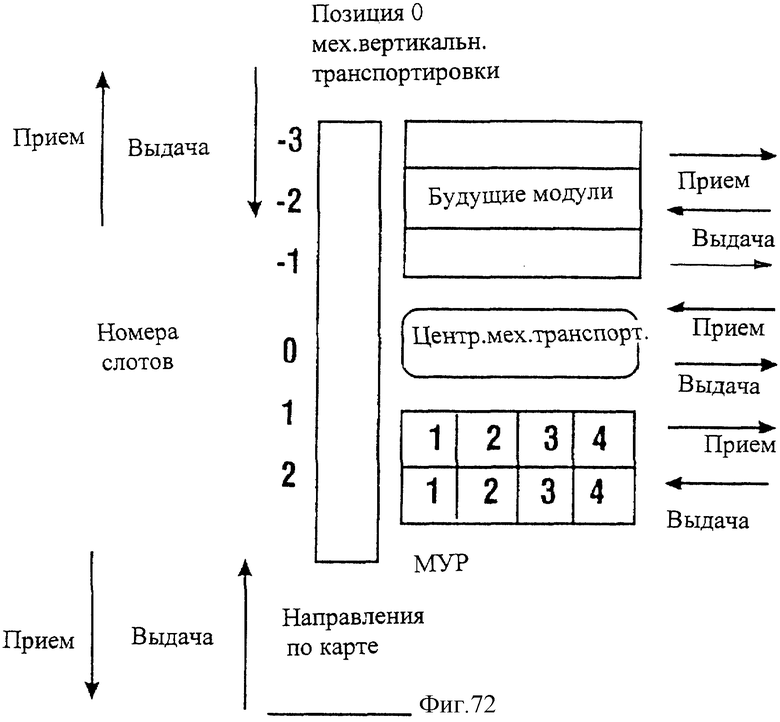
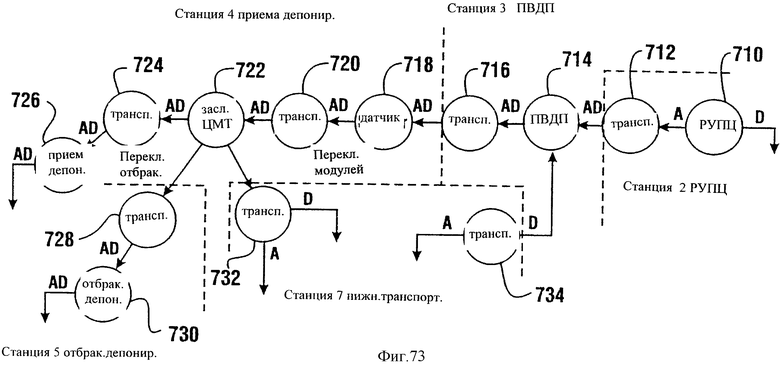
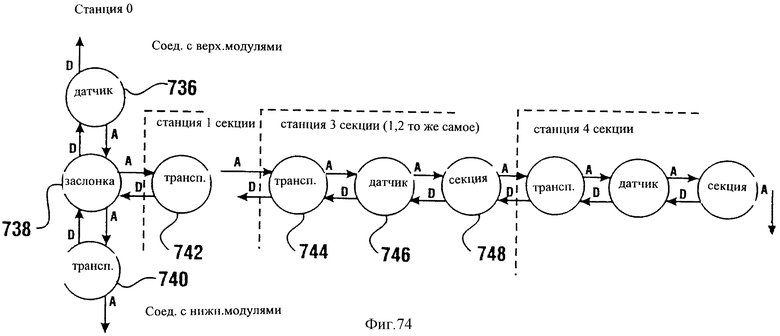
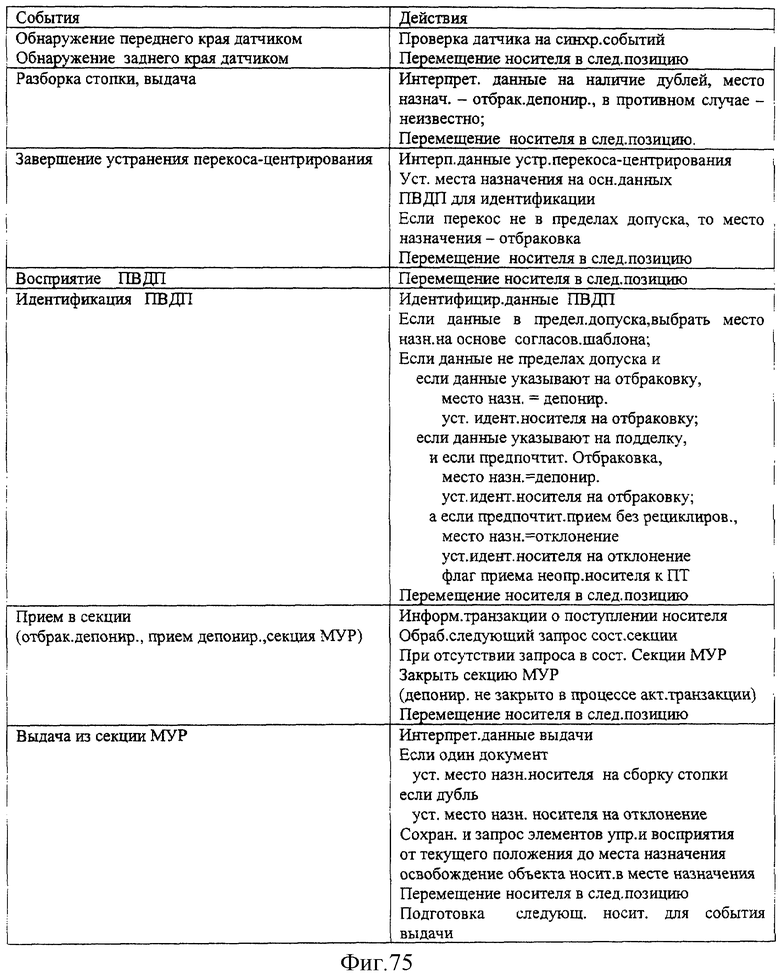
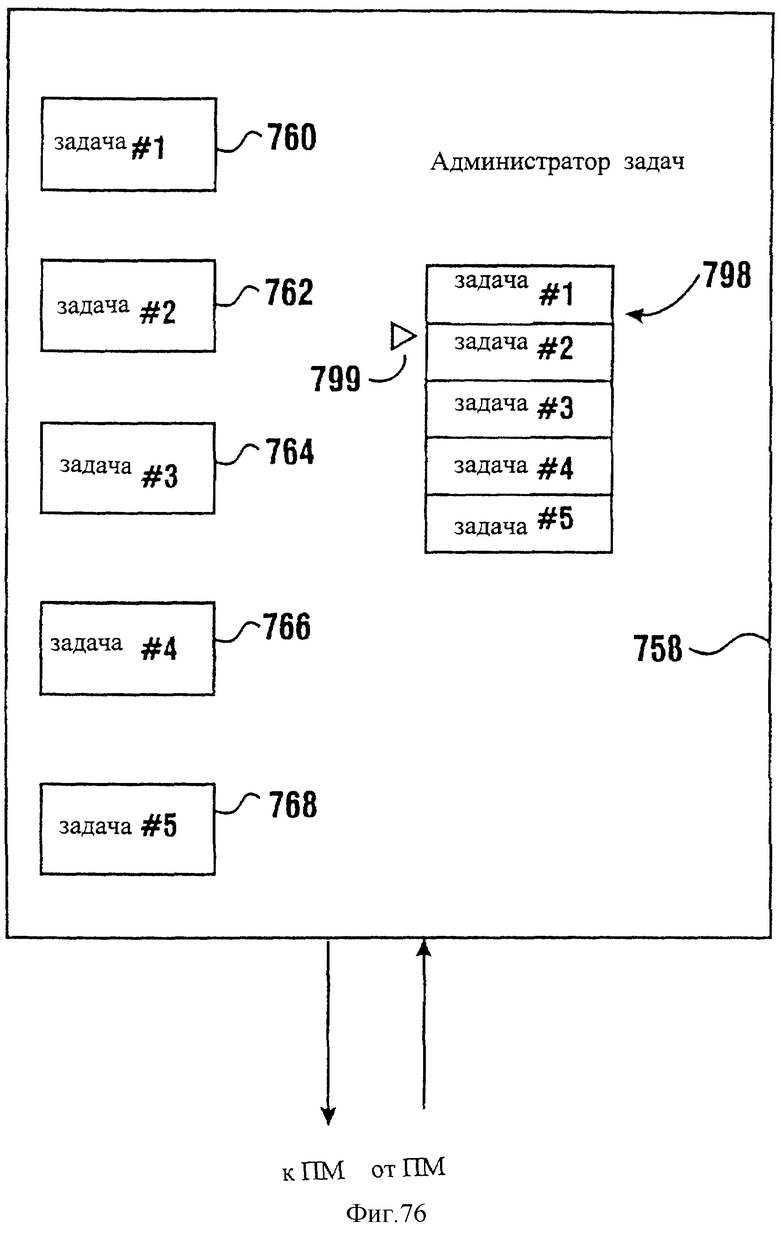
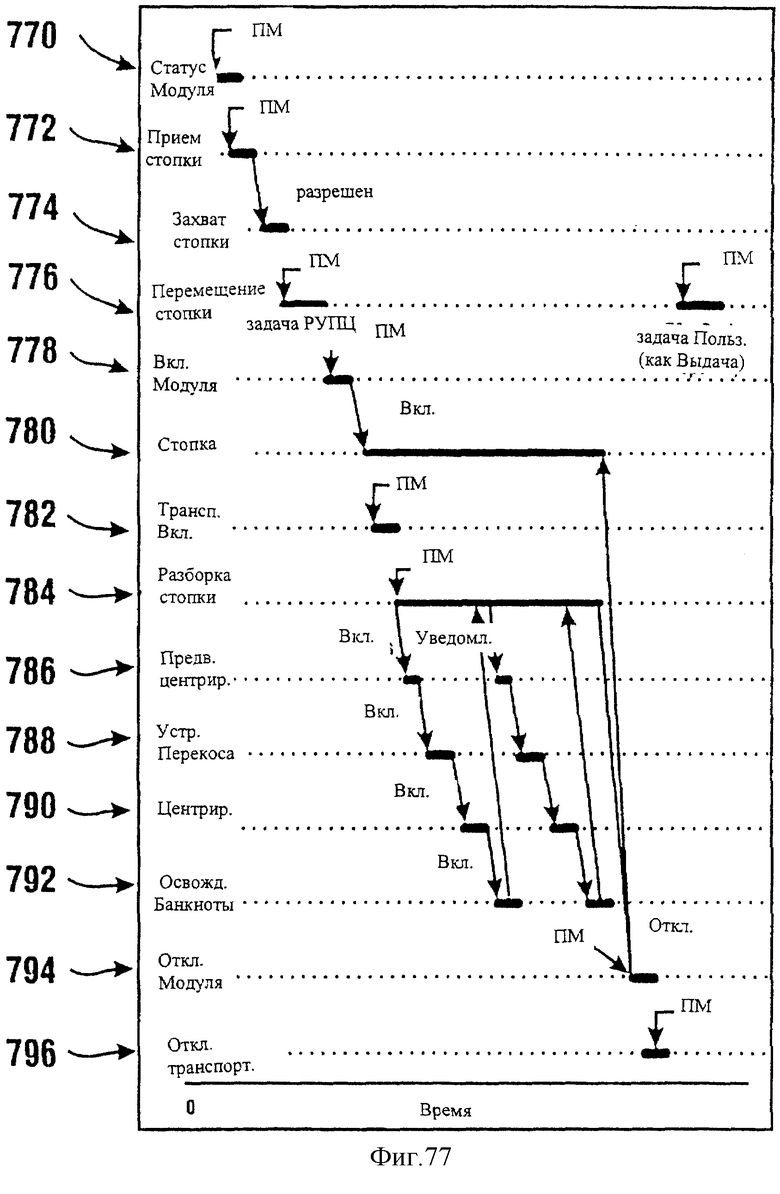
Заявленная система относится к средствам управления банковским автоматом, который идентифицирует и сохраняет документы, такие как банкноты денежных средств, помещенных пользователем. Автомат предназначен для селективного извлечения документов из зон хранения и выдачи их другим пользователям. Техническим результатом является повышение надежности в работе и увеличение скорости обслуживания при работе с разными валютами и документами. Автомат содержит центральный механизм транспортировки, в котором документы, помещенные в автомат стопкой, отделяются из стопки, ориентируются и идентифицируются. Такие документы затем направляются в зоны хранения в контейнеры повторного использования. Если пользователь затем введет запрос выдачи, то документы, сохраненные в зонах хранения, селективно извлекаются из них и доставляются пользователю через зону ввода/вывода автомата. Система управления автомата содержит процессор терминала, который осуществляет информационный обмен с процессором модулей. Процессор модулей осуществляет информационный обмен с контроллерами модулей, которые управляют работой устройств. Процессор модулей координирует действия контроллеров модулей для обеспечения обработки документов надежным образом и с высокими скоростями. 3 с. и 24 з.п. ф-лы, 77 ил.
| US 5553320 А, 03.09.1996 | |||
| RU 94022323 А1, 27.04.1997 | |||
| US 5144115 А, 01.09.1992 | |||
| US 4795889 А, 03.06.1989 | |||
| US 4625870 А, 02.12.1986 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| RU 94021082 С1, 27.08.1996 | |||
| МНОГОПЛАТФОРМЕННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ТВЕРДЫХ ЧАСТИЦ | 2016 |
|
RU2714749C1 |

