Изобретение относится к электротехнике, в частности к магнитоуправляемым герметизированным контактам.
Известны магнитоуправляемые герметизированные контакты, в которых контактирующие участки контакт-деталей замыкающей и размыкающей пар перекрывают друг друга [1].
При таком расположении неподвижные контакт-детали под воздействием магнитного поля оказывают влияние на процесс переключения подвижной контакт-детали. При управлении от постоянного магнита повышается вероятность зависания подвижной контакт-детали между моментами размыкания нормально-замкнутой пары и замыканием нормально-разомкнутой пары, в результате чего возможна временная потеря сигнала, коммутируемого магнитоуправляемым герметизированным контактом.
Наиболее близким к предлагаемому по технической сущности является магнитоуправляемый герметизированный контакт, содержащий две неподвижные контакт-детали и подвижную контакт-деталь, образующие замыкающую и размыкающую пары и закрепленные в торцах стеклянного баллона таким образом, что контактирующие участки контакт-деталей замыкающей и размыкающей пар смещены вдоль продольной оси и не перекрывают друг друга [2]. Недостатком указанного магнитоуправляемого герметизированного контакта из-за взаимного влияния контакт-деталей и недостаточной жесткости неподвижной контакт-детали, образующей нормально-замкнутую пару, кроме зависания подвижной контакт-детали в момент переключения наблюдается кратковременное притяжение к неподвижной контакт-детали, образующей нормально-разомкнутую пару с подвижной контакт-деталью, что недопустимо для некоторых условий эксплуатации, особенно при управлении магнитоуправляемого герметизированного контакта полем постоянного магнита.
Предлагается магнитоуправляемый герметизированный контакт, содержащий стеклянный баллон, в противоположные торцы которого заварены три контакт-детали таким образом, что переключаемая подвижная контакт-деталь образует нормально-замкнутую пару с одной контакт-деталью, а с другой неподвижной контакт-деталью образует нормально-разомкнутую пару, причем нормально-замкнутая и нормально-разомкнутая пары смещены вдоль продольной оси баллона без взаимного перекрытия контакт-деталей, отличающийся тем, что зазор в нормально-разомкнутой паре превышает зазор срыва и определяется из соотношения
где Х1 - зазор нормально-разомкнутой пары;
l1 - длина подвижной контакт-детали, осуществляющей процесс переключения;
l2 - величина смещения центров перекрытий нормально-разомкнутой и нормально-замкнутой пар вдоль продольной оси баллона;
а - величина перекрытия нормально-замкнутой пары;
C1 - жесткость подвижной контакт-детали;
С2 - жесткость упора нормально-замкнутой пары;
α° - угол между плоскостью подвижной контакт-детали и свободным концом упора нормально-замкнутой пары.
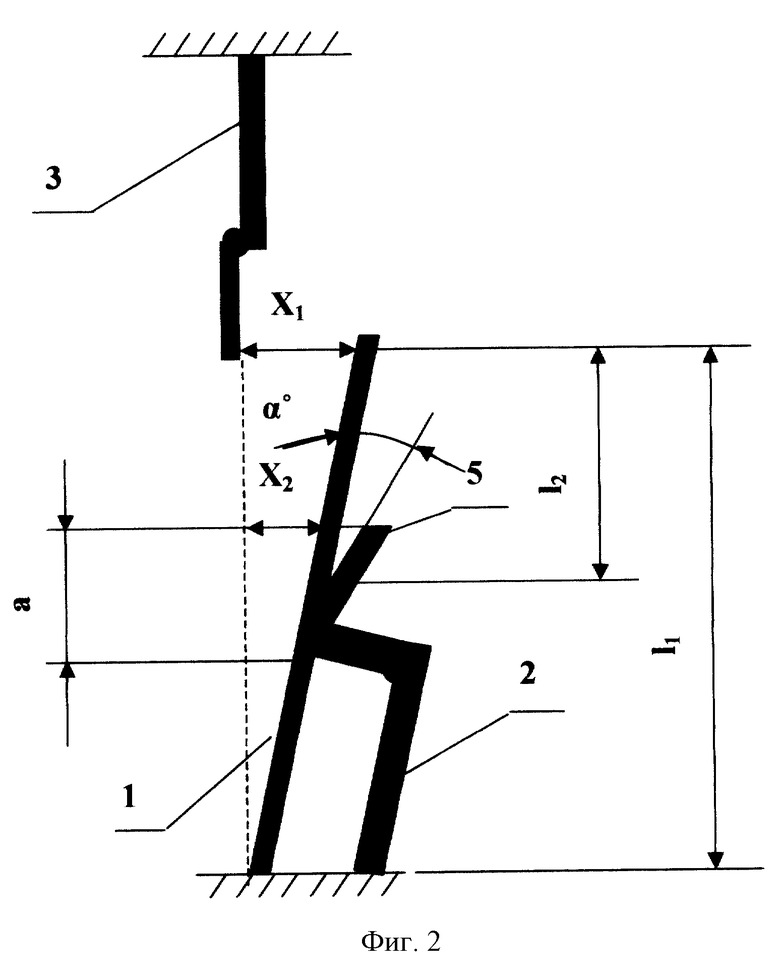
На фиг.1 представлена конструкция магнитоуправляемого герметизированного контакта, на фиг.2, 3, 4 - схема его работы в статике.
Магнитоуправляемый герметизированный контакт содержит подвижную переключающую контакт-деталь 1 и две неподвижные контакт-детали 2 и 3. Указанные контакт-детали заварены в противоположных торцах стеклянного баллона 4 так, что контакт-детали 1 и 2 образуют нормально-замкнутую пару, а контакт-детали 1 и 3 образуют нормально-разомкнутую пару.
При воздействии внешнего магнитного поля переключающая контакт-деталь 1 отходит от контакт- детали 2, при этом точка контактирования нормально-замкнутой пары плавно перемещается в точку 5 [фиг.2], после чего происходит скачкообразное уменьшение зазора нормально-разомкнутой пары x1. Величина перемещения свободного конца контакт-детали 2, отстоящего на угол α° от поверхности контакт-детали 1 до момента размыкания нормально-замкнутой пары в точке 5, определяется по закону Гука из следующего выражения:
ΔX2 = FK/C2 = 2asinα°,
где Fk - контактное нажатие в нормально-замкнутой паре;
С2 - жесткость контакт-детали 2;
а - величина перекрытия нормально-замкнутой пары;
α° - угол между плоскостью подвижной контакт-детали 1 и свободным концом контакт-детали 2, являющейся упором для контакт-детали 1 при обеспечении контактного нажатия в нормально-замкнутой паре.
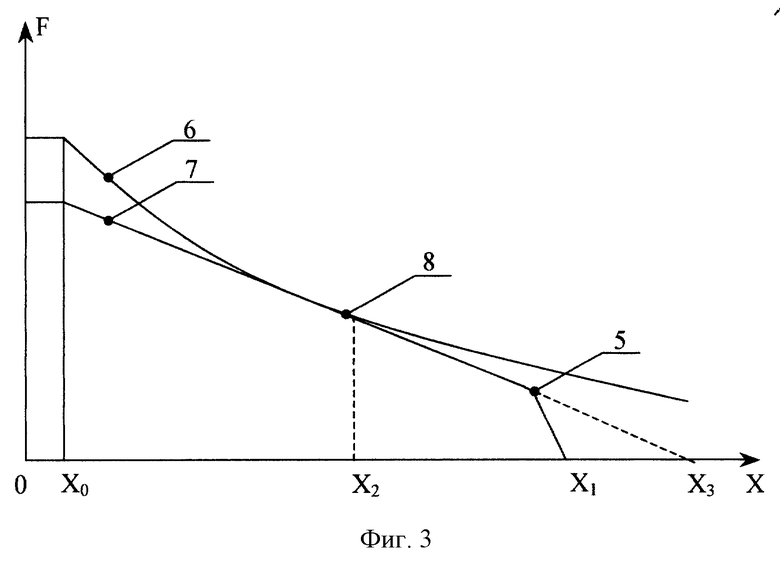
Если контактное нажатие Fk в нормально-замкнутой паре недостаточно, возможно зависание подвижной контакт-детали 1, как показано на фиг.3, представляющей зависимость тяговой 6 и противодействующей 7 характеристик магнитоуправляемого герметизированного контакта. При плавном увеличении внешнего магнитного поля подвижная контакт-деталь 1 размыкается с контакт-деталью 2 в точке 5, в которой контактное нажатие нормально-замкнутой пары компенсируется силой притяжения подвижной контакт-детали 1 к неподвижной контакт-детали 3. Зависание подвижной контакт-детали 1 заканчивается в точке 8, в которой тяговая 6 и противодействующая 7 характеристики имеют единственную общую точку соприкосновения.
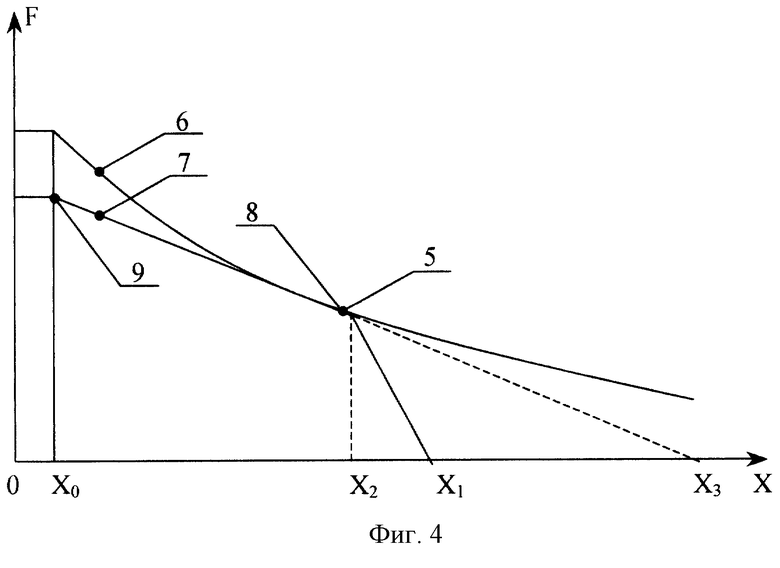
Условие полного отсутствия зависания подвижной контакт-детали 1 при скачкообразном переключении магнитоуправляемого герметизированного контакта представлено на фиг. 4 и заключается в совмещении точки 5 с точкой 8 или расположении точки 5 в промежутке между точками 8 и 9 на противодействующей характеристики 7. В этом случае контактное нажатие Fk в нормально-замкнутой паре меньше или равно силе электромагнитного притяжения контакт-деталей нормально-разомкнутой пары для критического зазора Х2, соответствующего точке 8.
В случае, когда контактное нажатие в нормально-замкнутой паре отсутствует, противодействующая характеристика магнитоуправляемого герметизированного контакта представляет собой отрезок прямой пересекающей оси координат на фиг.4 в точках 9 и Х3 при совмещении точки Х0 с началом координат по оси абсцисс, так как значением Х0 можно пренебречь, если суммарная толщина немагнитного контактного покрытия в нормально-разомкнутой паре не превышает нескольких микрон. В этом случае для точки 9, характеризующей замкнутое состояние нормально-разомкнутой пары, возвратное усилие для подвижной контакт-детали 1 определяется из соотношения Fyg=С1•Хз, где C1 - жесткость контакт-детали 1, а Хз - виртуальный зазор нормально-разомкнутой пары при отсутствии контактного нажатия в нормально-замкнутой паре. Согласно [3] зазоры Х2 и Х3 связаны следующим соотношением:
где Gx3 - магнитная проводимость зазора Хз;
G1 - магнитная проводимость подвижной контакт-детали 1;
K= G1/Gxз - коэффициент магнитной проводимости магнитоуправляемого герметизированного контакта.
Учитывая, что относительная магнитная проницаемость пермаллоя, из которого выполнены контакт-детали, в 1500 раз больше магнитной проницаемости воздушного зазора Хз, а также наличие неподвижной контакт-детали 2, образующей нормально-замкнутую пару с контакт-деталью 1, с большой вероятностью можно принять К≥10, имеющего область существования 0≤K≤∞.
Пренебрегая значением 1/К, получаем Х2= 2Хз/3 и соответственно Fyg= C1•X2•3/2. С другой стороны, согласно фиг.4 для случая совпадения точек 5 и 8, Fyg = C1•X2+FK = C1•X2+C2•2a•sinα°. Откуда для совместной точки 9 справедливо уравнение C1•X2•3/2 = C1•X2+C2•2a•sinα°, откуда X2 = 4C2•a•sinα°/C1. В этом случае оптимальное исходное значение зазора X1 в нормально-разомкнутой паре между контакт-деталями 1 и 3 из подобия треугольников на фиг.2 со сторонами X1, l1 и Х2, (l1-l2) определяется из выражения
где l1 - длина подвижной контакт-детали 1;
l2 - величина смещения центров перекрытий нормально-разомкнутой и нормально-замкнутой пар вдоль продольной оси баллона;
а - величина перекрытия нормально-замкнутой пары;
C1 - жесткость подвижной контакт-детали 1;
С2 - жесткость контакт-детали 2, являющейся упором нормально-замкнутой пары.
α°- угол между плоскостью подвижной контакт-детали 1 и свободным концом 5 упора 2 нормально-замкнутой пары.
На величину угла α° накладываются следующие ограничения. Во-первых, по обеспечению оптимального значения (0,03-0,05) Н контактного нажатия в нормально-разомкнутой паре, определяемого как разность ординат кривой 6 и прямой 7 в точке 9 на фиг. 4, а во-вторых, по нижней границе неравенства  устанавливающего область допустимых зазоров, при которых, согласно [3] , обеспечивается скачкообразное переключение подвижной контакт-детали без зависания.
устанавливающего область допустимых зазоров, при которых, согласно [3] , обеспечивается скачкообразное переключение подвижной контакт-детали без зависания.
Исходя из этого неравенства и проводя оценку исходных величин контактного нажатия в нормально-замкнутой паре, можно утверждать, что величина контактного нажатия для Х2=Хз/3 равна удвоенному значению контактного нажатия для Х2=2Хз/3 в предположении, что жесткости C1 и С2 постоянные.
Очевидно, что большему по абсолютной величине контактному нажатию соответствует больший угол α°. Учитывая, что для малых значений углов sinα° = α° можно записать следующее соотношение: 
Отсюда для неравенства  можно записать 15°≥α°>0°.
можно записать 15°≥α°>0°.
В опытных образцах магнитоуправляемого герметизированного контакта, выполненных согласно предлагаемому техническому решению, угол α° находится в пределах 1o÷10o.
Опытные образцы магнитоуправляемого герметизированного контакта, имеющие диаметр баллона 2,2 мм, длину баллона 14 мм, с магнитодвижущей силой срабатывания не более 35 А успешно выдержали испытания на безотказность до 5•107 циклов коммутаций активной нагрузки мощностью 6 Вт в режиме 60 В - 10 мА.
Источники информации
1. Патент США 3.559.123 МКИ Н 01 Н 51/06, 51/28 НКИ 335-154 заявлен 9.12.1968, опубликован 26.01.1971 г.
2. Патент ФРГ 1218614 МКИ Н 01 Н 1/66 НКИ 21g 4/01 заявлен 5.8.1963 г., опубликован 8.6.1966 г.
3. К. И. Харазов. Устройства автоматики с магнитоуправляемыми контактами. - М.: Энергоатомиздат, 1990 г. стр. 39.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОУПРАВЛЯЕМЫЙ ГЕРМЕТИЗИРОВАННЫЙ КОНТАКТ ДЛЯ ДАТЧИКОВ ПОРОГА СРАБАТЫВАНИЯ | 2001 |
|
RU2210828C2 |
| РЕЛЕ | 2001 |
|
RU2183039C1 |
| МАГНИТОУПРАВЛЯЕМЫЙ КОНТАКТ | 2011 |
|
RU2470401C1 |
| ВЫСОКОЧАСТОТНЫЙ СОГЛАСУЮЩИЙ ГЕРКОН | 2002 |
|
RU2237939C2 |
| МАГНИТОУПРАВЛЯЕМЫЙ КОНТАКТ | 2006 |
|
RU2304817C1 |
| КОНТАКТНОЕ ПОКРЫТИЕ МОЩНЫХ МАГНИТОУПРАВЛЯЕМЫХ КОНТАКТОВ (ВАРИАНТЫ) | 2001 |
|
RU2215342C2 |
| ДАТЧИК ОХРАННОЙ СИГНАЛИЗАЦИИ ОБЪЕКТА | 1992 |
|
RU2076353C1 |
| ВИБРАЦИОННЫЙ ДАТЧИК ДЛЯ УСТРОЙСТВ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210114C2 |
| КОНТАКТНОЕ ПОКРЫТИЕ ДЛЯ МАГНИТОУПРАВЛЯЕМЫХ ГЕРМЕТИЗИРОВАННЫХ КОНТАКТОВ И СПОСОБ НАНЕСЕНИЯ КОНТАКТНОГО ПОКРЫТИЯ | 2001 |
|
RU2218627C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГЕРКОНА С КОНТРОЛИРУЕМЫМИ ПАРАМЕТРАМИ АЗОТИРУЕМОГО СЛОЯ | 2011 |
|
RU2467425C1 |
Изобретение относится к электротехнике, в частности к магнитоуправляемым герметизированным контактам. Техническим результатом является повышение надежности магнитоуправляемого герметизированного контакта. Технический результат достигается за счет того, что в магнитоуправляемом герметизированном контакте с размыкающей контактной парой, в котором центры перекрытия нормально-разомкнутой и нормально-замкнутой пар смещены вдоль продольной оси баллона и отсутствует взаимное перекрытие трех контакт-деталей, оптимальное значение угла между свободным концом упора нормально-замкнутой пары, к которому прикасается подвижная контакт-деталь, находится в пределах 0°<α°≤15°, а исходное значение зазора нормально-разомкнутой пары в отсутствие внешнего магнитного поля определяется из соотношения
где X1 - исходное значение зазора нормально-разомкнутой пары; С2 - жесткость упора нормально-замкнутой пары; а - величина перекрытия нормально-замкнутой пары; α° - угол между плоскостью подвижной контакт-детали и свободным концом упора нормально-замкнутой пары; 11 - длина подвижной контакт-детали, осуществляющей процесс переключения; C1 - жесткость подвижной контакт-детали; 12 - величина смещения центров перекрытий нормально-разомкнутой и нормально-замкнутой пар вдоль продольной оси баллона. 1 з.п. ф-лы, 4 ил.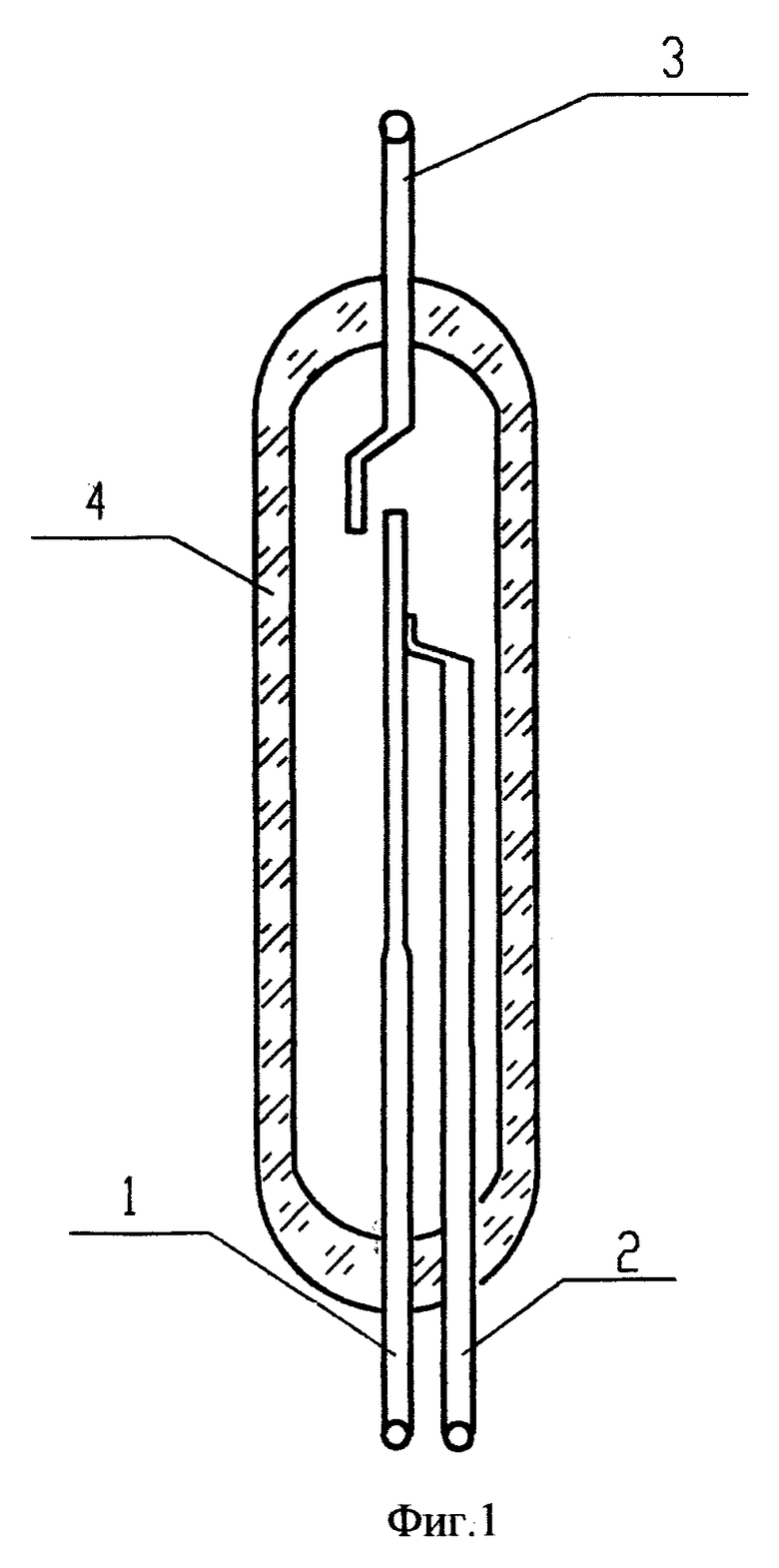
где X1 - зазор нормально-разомкнутой пары;
С2 - жесткость упора нормально-замкнутой пары;
а - величина перекрытия нормально-замкнутой пары:
α° - угол между плоскостью подвижной контакт-детали и свободным концом упора нормально-замкнутой пары;
l1 - длина подвижной контакт-детали, осуществляющей процесс переключения;
С1 - жесткость подвижной контакт-детали;
l2 - величина смещения центров перекрытий нормально-разомкнутой и нормально-замкнутой пар вдоль продольной оси баллона.
| УСТРОЙСТВО ЗАЩИТЫ ДВИГАТЕЛЯ | 1984 |
|
SU1218614A1 |
| Магнитоуправляемый герметизированный контакт | 1982 |
|
SU1065905A1 |
| ХАРАЗОВ К.И | |||
| Устройство автоматики с магнитоуправляемыми контактами | |||
| - М.: Энергоатомиздат, 1990, с.9, рис.1.3 (а), с.30 | |||
| US 3559123 А, 26.01.1971 | |||
| Стенд для ударных испытаний изделий | 1985 |
|
SU1265507A1 |

