Изобретение относится к электротехнике и может быть использовано при подключении к энергосистеме возбужденной синхронной машины, преимущественно электрогенератора.
Известен способ синхронизации, состоящий в регулировании частоты возбужденной синхронной машины до совпадения частот машины и сети, ожидании момента совпадения фаз машины и сети и включении машины в сеть в момент совпадения фаз [В.Н. Константинов. Синхронизация судовых синхронных генераторов. Л., "Судостроение", 1965, с.256-267].
Недостатком этого способа является большая длительность синхронизации из-за длительности подготовки частоты и большого периода между моментами возможного подключения к сети.
Наиболее близок к изобретению способ синхронизации возбужденной синхронной машины, состоящий в регулировании частоты до получения допустимого скольжения, ожидании момента совпадения фаз и включении машины в сеть в момент совпадения фаз. При этом введены операции, обеспечивающие оптимизацию переходного процесса при установлении заданного скольжения [А.с. СССР 1043787, Н 02 J 73/40, 1983]. Этот способ принят за прототип.
Недостаток прототипа состоит в большой длительности синхронизации, поскольку эта длительность складывается из двух последовательных во времени процессов: сначала происходит точная подгонка частоты машины (допустимое скольжение 0,05. . . 0,2 Гц, т.е. частота должна поддерживаться с точностью 0,1%) и затем ожидание совпадения фаз на этой частоте. Точная подгонка требует малых изменений расхода топлива в приводном двигателе, в итоге процесс подгонки идет медленно и занимает минуты. Этот недостаток особенно заметен при использовании газотурбинных установок на базе авиационных двигателей, у которых время пуска от нажатия кнопки до холостого хода составляет 2 мин. Эти установки можно использовать для экстренного восполнения дефицита мощности, но длительность синхронизации серьезно ограничивает эту возможность.
Техническая задача, решаемая изобретением, состоит в уменьшении длительности синхронизации.
Указанный технический результат обеспечивается тем, что в способе синхронизации возбужденной электрической машины, при котором регулируют частоту напряжения возбужденной синхронной машины в направлении сближения с частотой сети, измеряют разность фаз, включают машину в сеть в момент совпадение фаз, согласно изобретению при частоте напряжения возбужденной синхронной машины ниже, чем частота сети, увеличивают частоту напряжения возбужденной синхронной машины до уровня большего, чем частота сети, а измерение разности фаз начинают, когда частота напряжения возбужденной синхронной машины станет больше частоты сети.
Кроме того, указанный технический результат достигается также тем, что в способе синхронизации возбужденной синхронной электрической машины с сетью, при котором регулируют частоту напряжения возбужденной синхронной машины в направлении сближения с частотой сети, измеряют разность фаз и включают машину в сеть в момент совпадения фаз, согласно изобретению при частоте напряжения возбужденной синхронной машины выше, чем частота сети, уменьшают частоту напряжения возбужденной синхронной машины до уровня меньшего, чем частота сети, а измерение разности фаз начинают, когда частота напряжения возбужденной синхронной машины станет меньше частоты сети.
Кроме того, изменение частоты напряжения возбужденной синхронной машины производят с постоянным ускорением, не превышающим половины квадрата частоты скольжения.
При этом для повышения точности синхронизации вычисляют вторую производную разности фаз и определяют момент совпадения фаз при постоянной второй производной разности фаз.
Способ исключает операцию точной подгонки частоты машины. Для обеспечения минимального толчка при включении машины в сеть определяющей является не разность частот, и тем более не постоянство этой разности, чего добивались в прототипе, а совпадение фаз, что может быть достигнуто и при переменной частоте машины. При росте частоты машины, начиная от частоты сети, проходится весь диапазон малых скольжений и имеется достаточно времени для совпадения фаз.
Как правило, включение в сеть происходит при первом совпадении фаз при частоте напряжения возбужденной синхронной машины, большей частоты сети. Изменение частоты напряжения возбужденной машины с постоянным ускорением наиболее естественно, т.к. соответствует увеличению расхода топлива в приводном двигателе на постоянную величину, т.е. тоже без длительных переходных процессов. Равноускоренное движение ротора машины учитывается предлагаемым расчетом момента совпадения фаз и уменьшает толчок при подключении к сети.
На фиг.1 представлена схема устройства, реализующего способ; на фиг.2 - осциллограмма синхронизации в соответствии с предлагаемым способом.
Устройство содержит измерители частоты напряжения возбужденной синхронной машины 1, измеритель частоты сети 2 и измеритель разности фаз 3. Токовые выходы измерителей подключены к многоканальному аналого-цифровому преобразователю 4, выходы каналов 5, 6, 7 которого подключены к электронно-вычислительной машине 8. Программа электронно-вычислительной машины содержит сумматор 9, вычислитель 10, нуль-органы 11 и 12, интегратор 13, регулятор 14 и ключ 15.
Выход канала 5 и выход канала 7 соединены с входами сумматора 9, выход которого связан с входами нуль-органов 11 и 12. Выход нуль-органа 11 связан с входом запуска интегратора 13, выход которого связан с входом уставки регулятора 14. Вход регулируемой величины регулятора 14 соединен с выходом канала 5, а выход регулятора 14 связан с входом цифроаналогового преобразователя 16.
Выход нуль-органа 12 связан с управляющим входом ключа 15, через который дискретный сигнал с выхода вычислителя 10 проходит на управление выключателем, соединяющим машину с сетью (не показан). Второй выход ключа 15 связан с входом сброса интегратора 13.
Устройство работает следующим образом. Напряжение возбужденной машины поступает на измеритель 1 частоты этого напряжения, где преобразуется в сигнал постоянного тока, пропорциональный частоте напряжения возбужденной синхронной машины. Аналогично в измерителе 2 образуется сигнал тока, пропорциональный частоте сети. В измерителе 3 образуется токовый сигнал, пропорциональный разности фаз машины и сети. Он может быть получен, например, следующим образом: в интервале от перехода через ноль напряжения машины до перехода через ноль напряжения сети импульсы генератора высокой частоты подаются на счетчик, результат счета переписывается в регистр и преобразуется в аналоговый токовый сигнал; цикл повторяется в каждом периоде напряжения машины. Эти токовые сигналы в аналого-цифровом преобразователе 4 преобразуются в коды Kfк, Kfс, Kpϕ соответственно.
Далее коды Kfг и Kfс поступают на суммирующий и вычитающий входы 9 сумматора, который выделяет код скольжения Ks, поступающий на входы нуль-органов 11 и 12. Нуль-орган 11 определяет момент, когда скольжение машины относительно сети превысит величину Smin. Эта величина отрицательная, и она определяет момент, начиная с которого режим разгона ротора машины сменяется увеличением ее частоты с постоянным ускорением. Как правило, это постоянное ускорение меньше скорости разгона. Величина скольжения Smin подбирается так, чтобы режим постоянного ускорения установился до сравнения частоты напряжения возбужденной синхронной машины и частоты сети. Типичное значение Smin= -0,1 Гц.
Сигнал о превышении Smin с выхода нуль-органа 11 запускает интегратор 13, который вырабатывает линейно-возрастающую уставку на регулятор 14 частоты вращения машины, которая пропорциональна частоте fr; частота вращения синхронной машины будет возрастать с постоянным ускорением до прекращения работы интегратора 13. Во время работы интегратора 13 изменяется код КДН на выходе регулятора 14 и через дозатор 16 увеличивается расход топлива в приводе синхронной машины.
В момент равенства частот возбужденной синхронной машины и сети код скольжения Ks= 0 и срабатывает нуль-орган 12. Режим постоянного ускорения длится до достижения максимального скольжения Smax, допустимого по условиям точной синхронизации, типичное значение Smax=0,2...0,3 Гц. Ускорение возбужденной синхронной машины должно быть таким, чтобы при любых начальных условиях фазы напряжений машины и сети совпали раньше, чем будет достигнуто Smax. В самом неблагоприятном случае совпадения фаз в момент равенства частоты напряжения возбужденной синхронной машины и частоты сети это условие выполняется, когда постоянное ускорение не превышает половины квадрата максимального скольжения:
Определение момента совпадения фаз по изменению Kpϕ проводится в вычислителе 10, в котором определяется при каждом i - измерении Kpϕ также скорость  и ускорение
и ускорение 
Интервал до совпадения фаз определяется из решения уравнения
где t - время от момента измерения до момента совпадения фаз.
Когда это время станет равным времени срабатывания выключателя, соединяющего машину с сетью, вычислитель 10 выдает команду на замыкание этого выключателя. Эта команда проходит через ключ 15, открытый сигналом нуль-органа 12 с момента равенства частот fr и fc, где fc - частота напряжения сети.
Команда вычислителя проходит также на вход сброса интегратора 13.
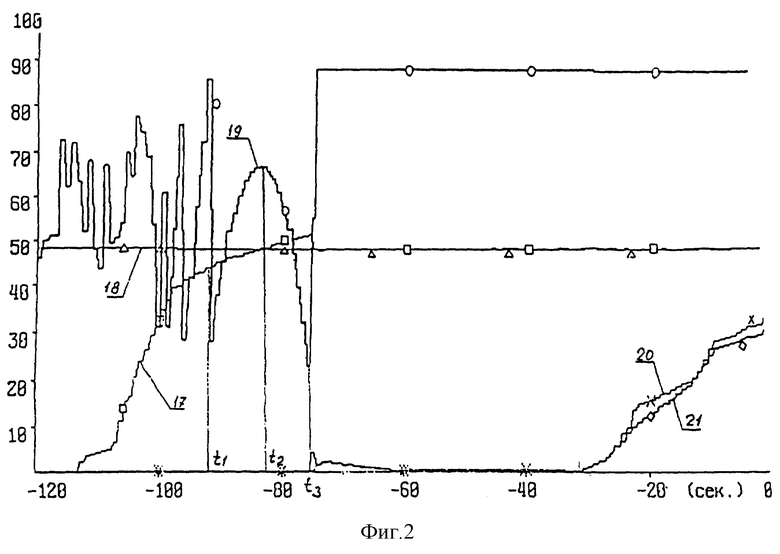
На фиг. 2 представлено изменение параметров в типичном эксперименте с синхронизацией предлагаемым способом. Кривая 17 отображает частоту напряжения возбужденной синхронной машины, кривая 18 - частоту сети, кривая 19 - разность фаз, кривая 20 - ток фазы А, кривая 21 - активную мощность машины.
Как видно на фиг.2, до момента t1 происходил начальный разгон машины, а с момента t1 - изменение частоты 17 напряжения возбужденной синхронной машины с постоянным ускорением. При этом разность фаз 19 меняется по закону квадратичной параболы. В момент t2 частота 17 напряжения возбужденной синхронной машины сравнивается с частотой 18 сети и с этого момента происходит уменьшение разности фаз 19 и рассчитывается время подачи команды на замыкание выключателя. В момент t3 разность фаз близка к нулю, замыкается выключатель. Возникает небольшой толчок тока 20 (около 5% номинального тока машины), и на этом синхронизация заканчивается. Качание ротора машины (видимое по току и мощности 21) затухает за один период.
Для газотурбинной установки мощностью 20 МВт среднее за 15 пусков время синхронизации предложенным способом не превышает 20 с.
Таким образом, в результате использования предлагаемого изобретения длительность синхронизации сокращается в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации генератора и источника переменного тока | 1977 |
|
SU636738A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2008 |
|
RU2359384C1 |
| Способ синхронизации возбуждённой синхронной машины с сетью | 2021 |
|
RU2770910C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2011 |
|
RU2457597C1 |
| Устройство точной синхронизации | 1987 |
|
SU1561145A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Устройство для автоматической синхронизации синхронного генератора | 1980 |
|
SU875534A1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОЙ МАШИНЫ | 2002 |
|
RU2242080C2 |
| Автоматический синхронизатор с постоянным временем опережения | 1979 |
|
SU888269A2 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОГО СИНХРОННОГО ГЕНЕРАТОРА С СЕТЬЮ | 2012 |
|
RU2494513C1 |
Изобретение относится к электротехнике и может использоваться для снижения длительности точной синхронизации и включения синхронной машины в сеть. Технический результат заключается в уменьшении длительности синхронизации. В способе синхронизации возбужденной синхронной машины с сетью подключенная машина возбуждается при подходе к подсинхронной частоте, затем задается непрерывное изменение частоты напряжения возбуждающей синхронной машины так, чтобы при этом изменении она перешла частоту сети, после этого перехода прогнозируется момент совпадения фаз, и в этот момент возбужденная синхронная машина включается в сеть. 2 с. и 2 з.п. ф-лы, 2 ил.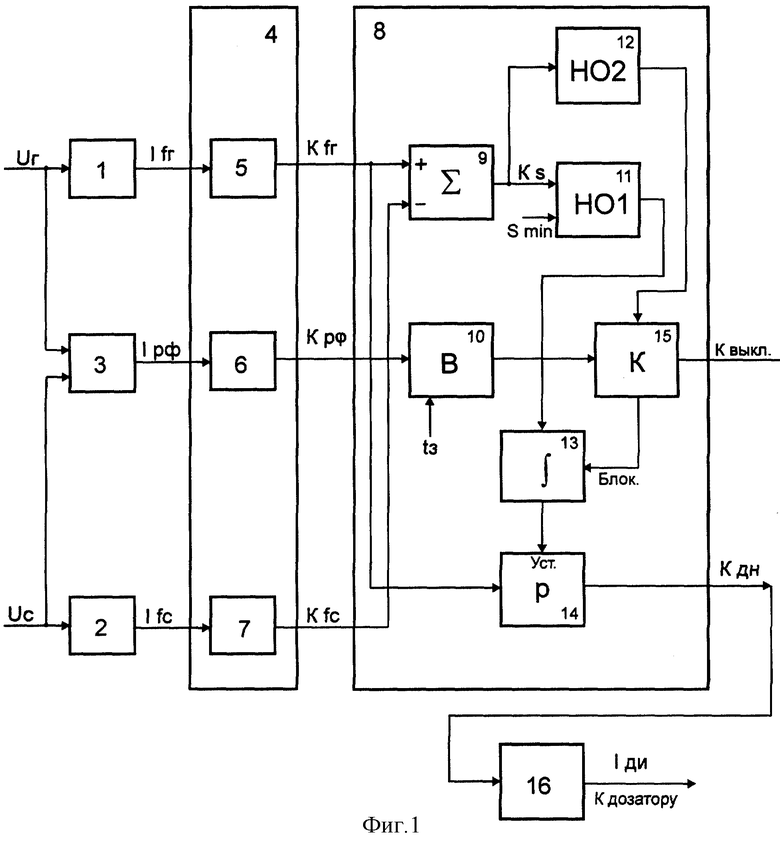
| Способ синхронизации возбужденной синхронной машины и устройство для его осуществления | 1981 |
|
SU1043786A1 |
| Ленточный пресс для выделки кирпичей из диатомовой земли | 1927 |
|
SU13256A1 |
| SU 758378, 23.08.1980 | |||
| SU 11511803, 30.09.1989 | |||
| КОНСТАНТИНОВ В.М | |||
| Синхронизация судовых синхронных генераторов | |||
| - Л.: Судостроение, 1965, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |

