Изобретение относится к области электротехники и может быть использовано для синхронизации синхронной возбужденной машины с сетью, а также для синхронизации частей энергосистем при включении на параллельную работу.
Известен способ синхронизации возбужденной синхронной машины с сетью [а.с. СССР №598179, МПК H02J 3/42, опубл. 15.03.78], заключающийся в том, что при развороте синхронной машины от нулевой частоты вращения путем фиксации действительного скольжения сравнивают его с заданным значением и, в зависимости от величины и знака полученной разности, воздействуют на изменение частоты вращения, причем заданное значение скольжения выбирают большим зоны нечувствительности регулятора скорости и меньшим половины допустимого значения по условию успешной синхронизации.
Недостатками известного способа являются трудность задания значения скольжения и большая длительность синхронизации из-за длительной подгонки частоты вращения синхронной машины.
Известен способ синхронизации возбужденной синхронной машины с сетью [патент РФ №2190917, МПК 7 H02J 3/42, Н02Р 9/42, опубл. 10.10.2002], заключающийся в том, что регулируют частоту напряжения возбужденной синхронной машины в направлении сближения с частотой сети, измеряют разность фаз и включают возбужденную синхронную машину в сеть в момент совпадения фаз. При этом при частоте напряжения возбужденной синхронной машины ниже частоты сети увеличивают частоту возбужденной машины до уровня, большего, чем частота сети, а измерение разности фаз начинают, когда частота напряжения возбужденной синхронной машины станет больше частоты сети.
Недостатками известного способа являются исключение операции точной подгонки частоты машины и необходимость ожидания момента совпадения фаз.
Известен способ синхронизации возбужденной синхронной машины с сетью [Дьяков А.Ф., Овчаренко Н.И. Микропроцессорная релейная защита и автоматика электроэнергетических систем: Учебное пособие для студентов вузов. - М.: Издательство МЭИ, 2000, с.9-26], при котором синхронизацию по частоте и углу векторов напряжений выполняют посредством выдачи импульсных управляющих воздействий на вращающий момент турбины методом «подгонки» и ожидания, при котором сначала осуществляют подгонку частоты возбужденной синхронной машины к частоте сети таким образом, чтобы оставалось некоторое сравнительно малое значение скольжения, а затем ожидают момент совпадения фаз.
Недостатком известного способа является большая длительность синхронизации, поскольку эта длительность складывается из двух последовательных во времени процессов: сначала производят точную подгонку частоты машины и затем ожидают момент совпадения фаз на этой частоте. Точная подгонка требует малых изменений расхода топлива в приводном двигателе, в итоге процесс подгонки идет медленно и занимает минуты. Этот недостаток особенно заметен при использовании газотурбинных установок на базе авиационных двигателей, у которых время пуска от нажатия кнопки до холостого хода составляет около 2 минут. Эти установки можно использовать для экстренного восполнения дефицита мощности, но длительность синхронизации существенно ограничивает эту возможность.
Существенным недостатком существующих способов является отсутствие формализованной процедуры перевода параметров относительного движения векторов напряжений возбужденной синхронной машины и сети к конечным значениям, а также неучет взаимосвязи между ними в ходе регулирования, что обуславливает невозможность обеспечения высокого качества одновременно с высоким быстродействием.
Наиболее близким, принятым за прототип, является способ синхронизации возбужденной машины с сетью [патент РФ №2359384, МПК H02J 3/40, H02J 3/42 (2006.01), опубл. 20.06.2009], включающий регулирование частоты напряжения возбужденной синхронной машины в направлении сближения с частотой сети, измерение разности фаз и включение возбужденной синхронной машины в сеть в момент совпадения фаз. На первом подынтервале регулирования движения ротора синхронизируемой синхронной машины приводят скольжение к нулевому значению. На втором подынтервале регулирования измеряют значение разности фаз для дальнейшего движения ротора синхронизируемого генератора, регулируют разность фаз в соответствии с движением ротора синхронизируемого генератора. На третьем подынтервале регулирования регулируют разность фаз в соответствии с движением ротора синхронизируемого генератора, до достижения скольжения и разности фаз нулевых значений в конце всего интервала управления, после чего синхронную машину включают на параллельную работу с сетью.
Известный способ-прототип позволяет сократить длительность и повысить качество процедуры точной синхронизации за счет использования формализованной процедуры перевода параметров относительного движения векторов напряжений возбужденной синхронной машины и сети к нулевым значениям и учета взаимосвязи между ними в ходе управления, что является несомненным достоинством, но обладает рядом недостатков:
1) необходимо обеспечивать двухполярные управляющие воздействия (то есть воздействия, подразумевающие как повышение частоты, так и ее снижение), что затруднительно для синхронизации синхронной машины с сетью;
2) не учитывается возможное ненулевое значение относительного ускорения и, как следствие, небаланс моментов в момент включения, что приводит к возникновению нежелательных переходных процессов;
3) подразумеваются три интервала управления, что усложняет предложенный способ.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Это достигается тем, что в способе синхронизации возбужденной машины с сетью, так же как в прототипе, регулируют частоту напряжения возбужденной синхронной машины в направлении сближения с частотой сети, определяют относительный угол, регулируют относительный угол в соответствии с движением ротора синхронной машины до достижения относительных скорости и угла нулевых значений, после чего синхронную машину включают на параллельную работу с сетью.
Согласно изобретению дополнительно определяют относительное ускорение. Производят построение траекторий движения эталонной модели для параметров относительного движения векторов напряжения синхронной машины и сети, на основании которых осуществляют постепенное одновременное подведение всех параметров относительного движения векторов напряжения синхронной машины и сети к нулевым значениям за счет однополярного регулирования небаланса мощности на валу синхронной машины в соответствии с полученными траекториями движения эталонной модели. При этом проверяют выполнение равенств относительного угла, относительной скорости и относительного ускорения нулевым или близким к нулевым значениям, в момент достижения которых синхронную машину включают на параллельную работу с сетью.
Для описания процессов синхронизации используют параметры относительного движения векторов напряжений возбужденной синхронной машины и сети:
относительное ускорение

относительную скорость

и относительный угол

связанные между собой соотношением:
где αUг и αUс - абсолютные ускорения векторов напряжений возбужденной синхронной машины и сети, рад/с2;
ωUг и ωUс - значения частот возбужденной синхронной машины и сети, рад/с;
δUг и δUс - абсолютные значения углов векторов напряжений возбужденной синхронной машины и сети, рад;
t - время, с.
За счет использования траекторий движения эталонной модели, позволяющих осуществить постепенное одновременное подведение всех параметров относительного движения векторов напряжений возбужденной синхронной машины и сети к нулевым значениям, достигается высокая точность и быстродействие процедуры синхронизации. Проведение синхронизации посредством выдачи однополярных управляющих воздействий позволяет также упростить практическую реализацию.
На фиг.1 представлена структурно-функциональная схема устройства синхронизации возбужденной синхронной машины с сетью на основе эталонной модели.
В таблице 1 представлены паспортные данные синхронного генератора Т-2-100-2.
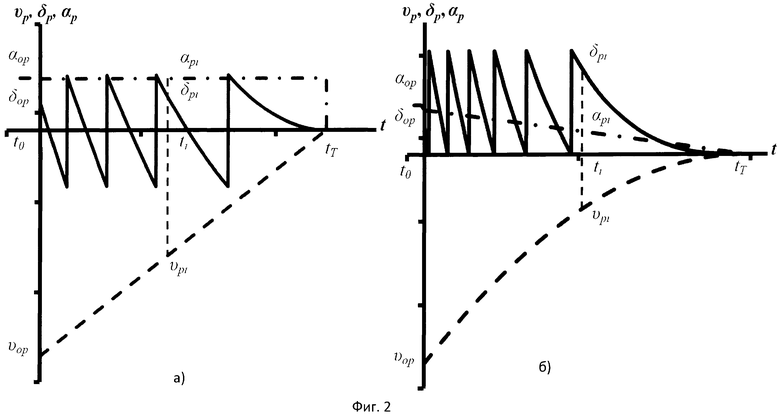
На фиг.2 представлены примеры построения траекторий движения эталонной модели а) - равноускоренного движения, б) - равномерно ускоренного движения.
Предложенный способ синхронизации возбужденной синхронной машины с сетью может быть осуществлен с помощью устройства синхронизации возбужденной синхронной машины с сетью на основе эталонной модели (фиг.1), которое содержит измерительный блок 1, входы которого подключены к измерительным трансформаторам напряжения синхронной машины и сети (на схеме не показаны). К измерительному блоку 1 подключен анализатор состояния 2, выход которого подключен к выключателю. К измерительному блоку 1 также подключен блок построения эталонной модели 3, соединенный с регулятором 4, выход которого подключен к устройствам регулирования.
Измерительный блок 1, анализатор состояния 2, блок построения эталонной модели 3, а также регулятор 4 реализованы на базе микроконтроллеров серии 51 производителя Atmel. В качестве устройств регулирования выбраны регуляторы частоты вращения ротора синхронной машины.
Для исследования был выбран синхронный генератор типа Т-2-100-2, паспортные данные которого приведены в табл.1.
На вход измерительного блока 1 от трансформаторов напряжения генератора и сети поступают мгновенные значения напряжений генератора Uг(t) и сети Uс(t). В измерительном блоке 1 посредством цифровой обработки сигналов [Дьяков А.Ф., Овчаренко Н.И. Микропроцессорная релейная защита и автоматика электроэнергетических систем: Учебное пособие для студентов вузов. - М.: Издательство МЭИ, 2000, с.20-22] производят определение параметров относительного движения векторов напряжения генератора и сети: относительного угла δ и относительной скорости υ. Значение относительного ускорения α определяют как производную от относительной скорости υ. Полученные параметры относительного движения векторов напряжения генератора и сети поступают в анализатор состояния 2, где проверяют выполнение условий синхронизации, т.е. равенства параметров относительного движения нулевым или близким к нулевым значениям. В случае выполнения условий синхронизации подают сигнал на включение выключателя, в случае не выполнения - процедура синхронизации продолжается. С измерительного блока 1 сигналы, пропорциональные значениям параметров относительного движения векторов напряжения генератора и сети, поступают в блок построения эталонной модели 3, в котором производят построение траекторий движения эталонной модели для параметров относительного движения векторов напряжения генератора и сети.
Траектории движения эталонной модели строят таким образом, чтобы в течение процедуры синхронизации обеспечивался постепенный одновременный переход параметров относительного движения векторов напряжения генератора и сети к нулевым значениям. Вид траекторий движения эталонной модели определяется возможностями регулирующих устройств и программируется заранее.
Если частоты генератора и сети в начальный момент времени равны 48 Гц и 50 Гц, абсолютные значения углов векторов напряжений генератора δUг0 и сети δUс0 равны 90 и 0 град, а абсолютное значение ускорения ротора генератора αUг0 равно 3 рад/с2. В измерительном блоке 1 производят определение начальных значений параметров относительного движения векторов напряжения генератора и сети:
относительного ускорения
α0=αUг0-αUc0=3-0=3 рад/с2,
относительной скорости
u0=ωUг0-ωUс0=2π·48-2π·50=2·3,14·(48-50)=-12,5664 рад/с
и относительного угла
δ0=δUг0-δUс0=(90-0)=90°=90·π/180=1,5708 рад.
В анализаторе состояния 2 проверяют выполнение условий синхронизации. Так как начальные значения параметров относительного движения векторов напряжения генератора и сети δ0, υ0, α0 не равны нулю и не близки к нулю, команды на включение выключателя не подают и начинают процедуру синхронизации.
В блок построения эталонной модели 3 из измерительного блока 1 поступают измеренные значения относительных параметров движения векторов напряжения генератора и сети, на основе которых производят построение траекторий движения эталонной модели для выбранного закона управления.
При выборе траектории равноускоренного движения эталонной модели (фиг.2, а) определяют число оборотов вектора напряжения генератора относительно вектора напряжения сети для измеренных начальных значений параметров относительного движения α0, υ0, δ0:

Полученное значение округляют до наибольшего целого числа nр=4. Индекс р означает принадлежность параметров к траектории движения эталонной модели, реальные (полученные в результате измерений) параметры указаны без индекса.
Далее производят определение относительного ускорения αp, поддержание которого в течение времени управления обеспечит одновременный переход относительных угла δр и скорости υp до нулевых значений за nр полных оборотов вектора напряжения генератора относительно вектора напряжения сети:

Время управления tT, в течение которого относительные угол δр и скорость υp приобретут нулевые значения, определяют по формуле:
Траектории движения для относительной скорости υp и относительного угла δр получают из дифференциальной связи между параметрами относительного движения векторов напряжения генератора и сети (4):
υp=υ0+αpt=-12,5664+2,9582t,
δp=δ0+υ0t+0,5αpt2=1,5708-12,5664t+0,5·1,4791t2.
Полученное значение относительного ускорения αp подают на регулятор 4, в котором в начальный момент времени формируют управляющие воздействия на устройства регулирования, обеспечивающие скачкообразное изменение относительного ускорения с 3 рад/с2 до 2,9582 рад/с2. Управляющие воздействия представляют собой изменение небаланса мощности на валу генератора:

где ΔР0 - начальный небаланс мощности на валу генератора, о.е.;
Тj - постоянная инерции генератора, с.
Последующие управляющие воздействия формируют с учетом изменения угловой частоты генератора, которую определяют по формуле:
ωUг=ωUc+υp=ωUc+υ0+α0t=2·3,14·50-12,5664+2,6821t=
=301,4336+2,6821·t.
Таким образом, регулятором 4 осуществляют управляющие воздействия на устройства регулирования, обеспечивающие линейное изменение небаланса мощности на валу генератора на протяжении всего времени управления tT:

где ΔР - небаланс мощности на валу генератора, о.е.
В момент времени t=tT в анализаторе состояния 2 выполняют проверку выполнения условий синхронизации, в случае выполнении которых при помощи регулятора 4 выполняют скачкообразное обнуление относительного ускорения α, т.е. снимают управляющие воздействия, обеспечивая равенство нулю небаланса мощности на валу генератора, и при помощи анализатора состояния 2 подают сигнал на включение выключателя.
В случае отклонения реального движения вектора напряжения генератора от траекторий движения эталонной модели в блоке построения эталонной модели 3 на основе данных с измерительного блока 1 будет выполняться построение новых траекторий движения эталонной модели и процедура синхронизации будет повторена.
При выборе траектории равномерно ускоренного движения эталонной модели (фиг.2, б) в блоке построения эталонной модели 3 определяют число оборотов вектора напряжения генератора относительно вектора напряжения сети для измеренных начальных значений параметров относительного движения α0, υ0, δ0.

Полученное значение округляют до наибольшего целого числа nр=6. После чего производят определение начального относительного ускорения αр0, линейное изменение которого обеспечит одновременный переход всех параметров относительного движения векторов напряжения генератора и сети за np полных оборотов вектора напряжения генератора относительно вектора напряжения сети:

Время управления, в течение которого параметры относительного движения αр, υp и δр приобретут нулевые значения, определяют по формуле:

Траектории движения эталонной модели при равномерно ускоренном движении определяют по следующим выражениям:



Полученное значение начального относительного ускорения подают на регулятор 4, в котором формируют управляющие воздействия на устройства регулирования, обеспечивающие скачкообразное изменение относительного ускорения с 3 рад/с2 до 2,6821 рад/с2:

После чего производится управление движением ротора генератора согласно построенной ранее траектории движения для αp посредством выдачи управляющих воздействий на устройства регулирования:

где значение угловой скорости  определяют через относительную скорость:
определяют через относительную скорость:

Таким образом, регулятором 4 осуществляют управляющие воздействия на устройства регулирования, обеспечивающие изменение небаланса мощности на валу генератора на протяжении всего времени управления tT:

В случае отклонения реального движения вектора напряжения генератора от траекторий движения эталонной модели в блоке построения эталонной модели 3 на основе данных с измерительного блока 1 будет выполняться построение новых траекторий движения эталонной модели и процедура синхронизации будет повторена.
В момент времени t=tT в анализаторе состояния 2 выполняют проверку условий синхронизации, в случае выполнении которых подают сигнал на включение выключателя и генератор включают на параллельную работу с сетью.
Изобретение относится к области электротехники и может быть использовано для синхронизации синхронной возбужденной машины с сетью, а также для синхронизации частей энергосистем при включении на параллельную работу. Техническим результатом от применения заявленного способа является упрощение практической реализации, повышение точности и быстродействия. Указанный технический результат достигнут тем, что в способе синхронизации возбужденной синхронной машины с сетью определяют относительный угол, относительную скорость и относительное ускорение. Производят построение траекторий движения эталонной модели для параметров относительного движения векторов напряжения синхронной машины и сети. На основании построенных траекторий осуществляют постепенное одновременное подведение всех параметров относительного движения векторов напряжения синхронной машины и сети к нулевым значениям за счет однополярного регулирования небаланса мощности на валу синхронной машины в соответствии с полученными траекториями движения эталонной модели. При этом проверяют выполнение равенств относительного угла, относительной скорости и относительного ускорения нулевым или близким к нулевым значениям, в момент достижения которых синхронную машину включают на параллельную работу с сетью. 1 з.п. ф-лы, 2 ил., 1 табл.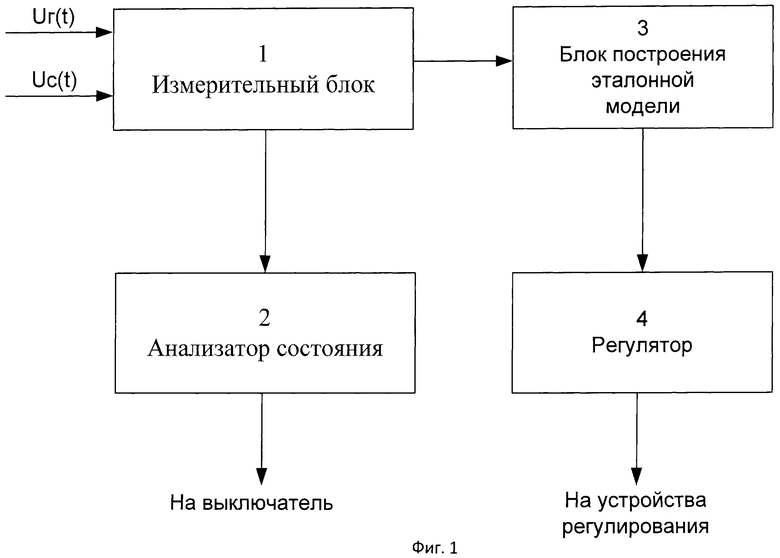
1. Способ синхронизации возбужденной синхронной машины с сетью, включающий регулирование частоты напряжения возбужденной синхронной машины в направлении сближения с частотой сети, определение относительного угла, регулирование относительного угла в соответствии с движением ротора синхронной машины до достижения относительных скорости и угла нулевых значений, после чего синхронную машину включают на параллельную работу с сетью, отличающийся тем, что дополнительно определяют относительное ускорение, производят построение траекторий движения эталонной модели для параметров относительного движения векторов напряжения синхронной машины и сети, на основании которых осуществляют постепенное одновременное подведение всех параметров относительного движения векторов напряжения синхронной машины и сети к нулевым значениям за счет однополярного регулирования небаланса мощности на валу синхронной машины в соответствии с полученными траекториями движения эталонной модели, при этом проверяют выполнение равенств относительного угла, относительной скорости и относительного ускорения нулевым или близким к нулевым значениям, в момент достижения которых синхронную машину включают на параллельную работу с сетью.
2. Способ по п.1, отличающийся тем, что параметры относительного движения векторов напряжения синхронной машины и сети определяют по формулам:
относительное ускорение
 ,
,
относительная скорость
υ=ωUг-ωUс,
относительный угол
 ,
,
и которые связаны между собой соотношением:
 ,
,
где αUг и αUc - абсолютные ускорения векторов напряжений возбужденной синхронной машины и сети, рад/с2;
ωUг и ωUc - значения частот возбужденной синхронной машины и сети, рад/с;
δUг и δUc - абсолютные значения углов векторов напряжений возбужденной синхронной машины и сети, рад;
t - время, с.
| Способ синхронизации возбужденной синхронной машины | 1987 |
|
SU1511803A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2008 |
|
RU2359384C1 |
| US 4249088 A1, 03.02.1981. | |||

