Изобретение относится к области электротехники, а именно к способам синхронизации возбуждённой синхронной машины с сетью, которое также может быть использовано для синхронизации нагруженной синхронной машины с сетью, синхронизации двух нагруженных синхронных машин между собой, синхронизации частей энергосистемы между собой.
Известен способ синхронизации возбуждённой синхронной машины [а.с. СССР №598179, МПК H02J 3/42, опубл. 15.03.78], заключающийся в том, что для достижения условий синхронизации фиксируют действительное скольжение и, в зависимости от величины и знака разности абсолютного значения действительного скольжения с заданным значением, осуществляют воздействие на изменение скорости машины, причем заданное значение заданного скольжения выбирают большим зоны нечувствительности регулятора скорости и меньшим половины допустимого значения скольжения по условиям синхронизации.
Недостатком известного способа является сложность определения абсолютной величины воздействия на изменение скорости машины и большая длительность синхронизации из-за длительной подгонки скорости вращения синхронной машины.
Известен способ синхронизации возбуждённой синхронной машины с сетью [патент РФ №2190917, МПК 7 H02P 3/42, H02P 9/42, опубл. 10.10.2002], в соответствии с которым скорость вращения возбуждённой синхронной машины изменяют таким образом, чтобы частота генерируемого напряжения сближалась с частотой напряжения сети и, после перехода значения частотой генерируемого напряжения частоты напряжения сети, возбуждённая синхронная машина включается в сеть в момент, когда угол разности фаз синхронизируемых напряжений принимает нулевое значение.
Недостатком известного способа является тот факт, что включение синхронного генератора в сеть происходит при ненулевом значении относительной скорости.
Известен способ синхронизации возбуждённой синхронной машины с сетью [патент РФ №2359384, МПК H02J 3/40, H02J 3/42, опубл. 20.06.2009], согласно которому возбуждённую синхронную машину подключают к сети в момент совпадения фаз. Способ синхронизации разделяется на три этапа, на каждом из которых измеряют разность фаз и относительную скорость синхронизируемых напряжений, при этом, регулирование выполняется таким образом, чтобы к концу третьего этапа разность фаз и относительная скорость приняли нулевое значение.
Недостатком известного способа является необходимость знать величину такого параметра, как постоянная инерции генератора или части энергосистемы для определения величины управляющего воздействия, что является затруднительной задачей в процессе эксплуатации. Ещё одним недостатком является ступенчатое изменение управляющего сигнала, что, в общем случае, приводит к перерегулированию относительной скорости, а, следовательно, и к перерегулированию относительного угла. По этой причине, в момент снятия регулирующего сигнала и включения генератора в сеть, последний будет обладать инерционностью, которая приведёт к возникновению уравнительных токов.
Наиболее близким к заявляемому изобретению по количеству общих признаков является способ синхронизации возбуждённой синхронной машины с сетью [патент РФ №2457597, МПК H02J 3/42, опубл. 27.07.2012], включающий регулирование частоты напряжения возбуждённой синхронной машины в направлении сближения с частотой сети, определение относительного угла, определение относительной скорости, определение относительного ускорения, регулирование относительного угла в соответствии с движением ротора синхронной машины до достижения относительной скорости и угла нулевых значений, после чего генератор включают в сеть. Данный способ принят за прототип. В соответствии с сущностью способа-прототипа производят построение траекторий движения эталонной модели для параметров относительного движения векторов напряжения синхронной машины и сети. Траектории движения строятся таким образом, чтобы к концу синхронизации относительные параметры приняли нулевые значения. Вид траектории движения задаётся заранее и определяется возможностями регулирующих органов.
Одним из заявленных в описании изобретения-прототипа свойств является точное выполнение условий синхронизации за счёт использования траекторий движения эталонной модели. Однако, как следует из описания изобретения-прототипа, для формирования управляющего воздействия требуется информация о постоянной инерции генератора. В частном случае, когда речь идёт о синхронизации с сетью генератора, работающего в режиме холостого хода, механическая постоянная инерции определяется массой и формой вращающихся частей синхронной машины и её приводного двигателя. В случае, когда говорится о синхронизации с сетью нагруженного генератора, а именно синхронизации с сетью электрических шин, на которых происходит распределение нагрузки генератора, необходимо рассматривать механическую постоянную инерции энергосистемы, состоящую из механической постоянной инерции генератора и механической постоянной инерции подключенных к нему нагрузок. Более того, следует принимать во внимание электрические постоянные времени генератора и нагрузок, обусловленные наличием индуктивностей и ёмкостей в системе.
Также необходимо отметить, что в изобретении-прототипе при определении величины управляющего воздействия используется пропорциональная зависимость между управляющим воздействием и функцией относительного ускорения и относительной скорости. Этим самым игнорируется сложная и нелинейная зависимость между механическими и электрическими параметрами синхронной машины, которая может быть определена с определёнными допущениями через решение системы дифференциальных уравнений Парка-Горева.
Таким образом, для формирования управляющих импульсов, которые, воздействуя на регулирующие органы приводного двигателя генератора, изменяют скорость его вращения в соответствии с заданной траекторией, необходимо, во-первых, иметь численное значение параметров генератора и энергосистемы, величина которых имеет априорную неопределённость и изменяется во времени, во-вторых, выполнить трудоёмкие расчёты переходных процессов в электромеханической системе на основании этих параметров, что скажется на длительности синхронизации.
Стоит заметить, что, несмотря на то что изобретение-прототип не в полной мере отвечает требованиям, указанным выше, в его алгоритме заложена функция повторной синхронизации с новыми коэффициентами траектории движения эталонной модели при неуспешной синхронизации. И, при достаточном количестве повторов будут подобраны оптимальные коэффициенты траектории движения для выполнения успешной синхронизации, однако, это скажется на длительности синхронизации, а в крайнем случае таких коэффициентов может и не оказаться.
В основу настоящего изобретения положена задача создания нового простого способа синхронизации, позволяющего включать синхронную машину в сеть или объединять участки энергосистемы при нулевых или близких к нулю значениях относительной скорости, угла и ускорения без необходимости выполнения трудоёмких расчётов параметров электромеханической системы.
Техническим результатом изобретения является повышение точности и быстродействия синхронизации, особенно в системах, где синхронизируют нагруженную синхронную машину с сетью.
Поставленная задача решена следующим образом. Так же как и в способе-прототипе, определяют относительный угол, относительное ускорение, производят регулирование относительного угла в соответствии с движением ротора синхронной машины до достижения относительного угла и скорости нулевых значений, после чего проверяют равенство относительного угла, относительной скорости и относительного ускорения нулевым или близким к нулю значениям, в момент достижения которых синхронную машину включают на параллельную работу с сетью. Согласно изобретению, дополнительно осуществляют тестовое воздействие на систему регулирования скорости вращения синхронной машины. Измеряют величину изменения фазового угла синхронизируемого напряжения при тестовом воздействии. На основании измеренных данных при тестовом воздействии определяют величину и длительность управляющего воздействия. При этом, величина и длительность управляющего воздействия выбираются такими, чтобы после снятия управляющего воздействия и окончания переходного процесса параметры относительного движения приняли нулевое или близкое к нулю значения. Далее осуществляют управляющее воздействие вычисленной ранее длительности и величины и ожидают затухание переходного процесса, после чего проверяют выполнение условий синхронизации. В случае выполнения условий синхронизации, включают машину на параллельную работу с сетью, а в случае невыполнения синхронизируют машину заново.
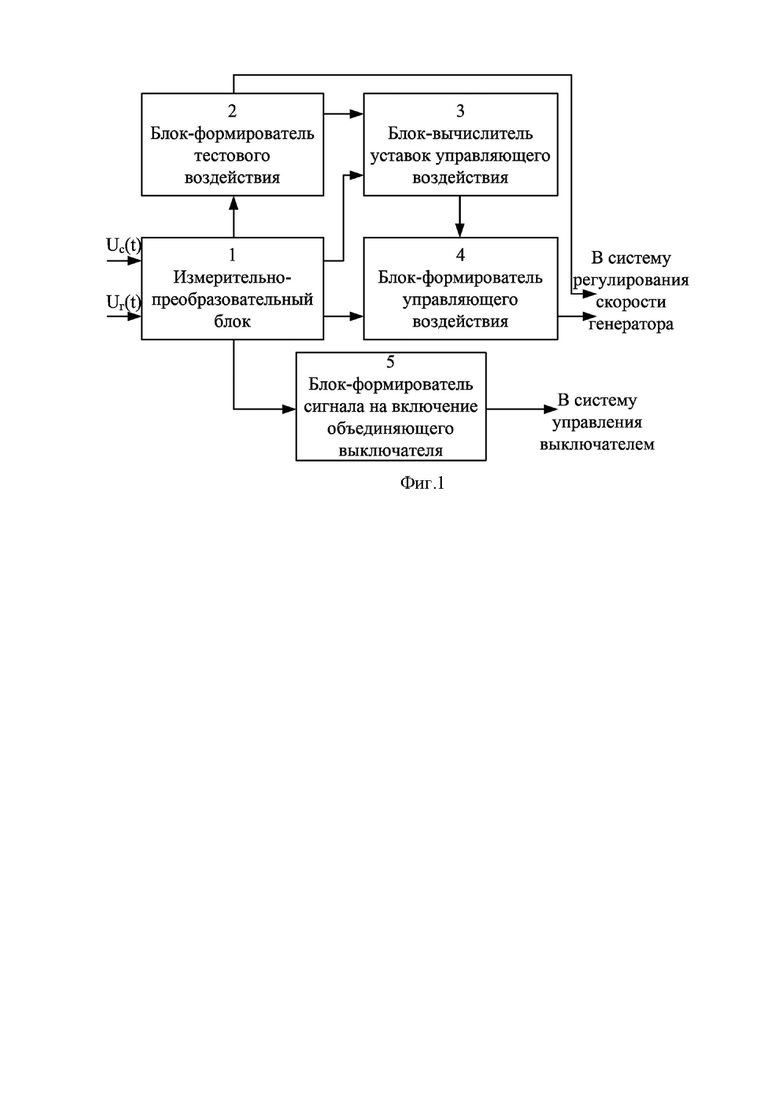
На фиг.1 изображена функциональная схема устройства, реализующего способ синхронизации возбуждённой синхронной машины с сетью.
В таблице 1 представлены паспортные данные исследуемой трёхфазной синхронной машины.
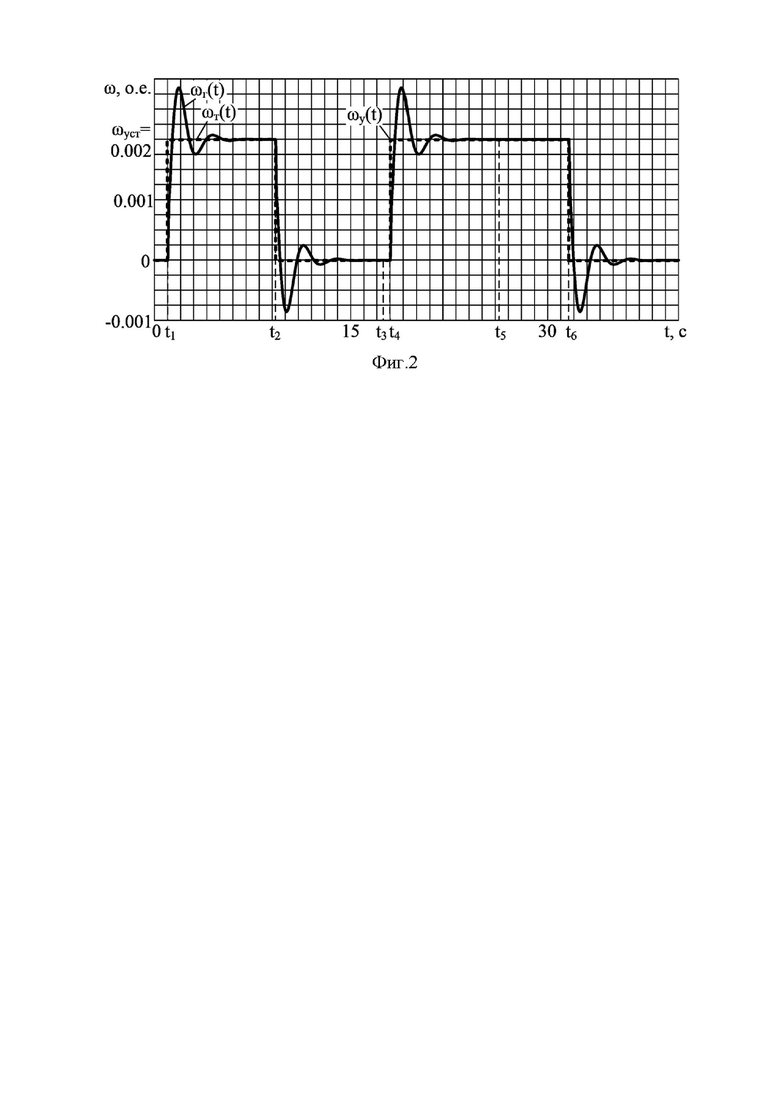
На фиг. 2 представлен график зависимости относительной скорости генератора от времени  при осуществлении тестового и управляющего воздействий. Также изображены графики тестового
при осуществлении тестового и управляющего воздействий. Также изображены графики тестового  и управляющего
и управляющего  воздействий.
воздействий.
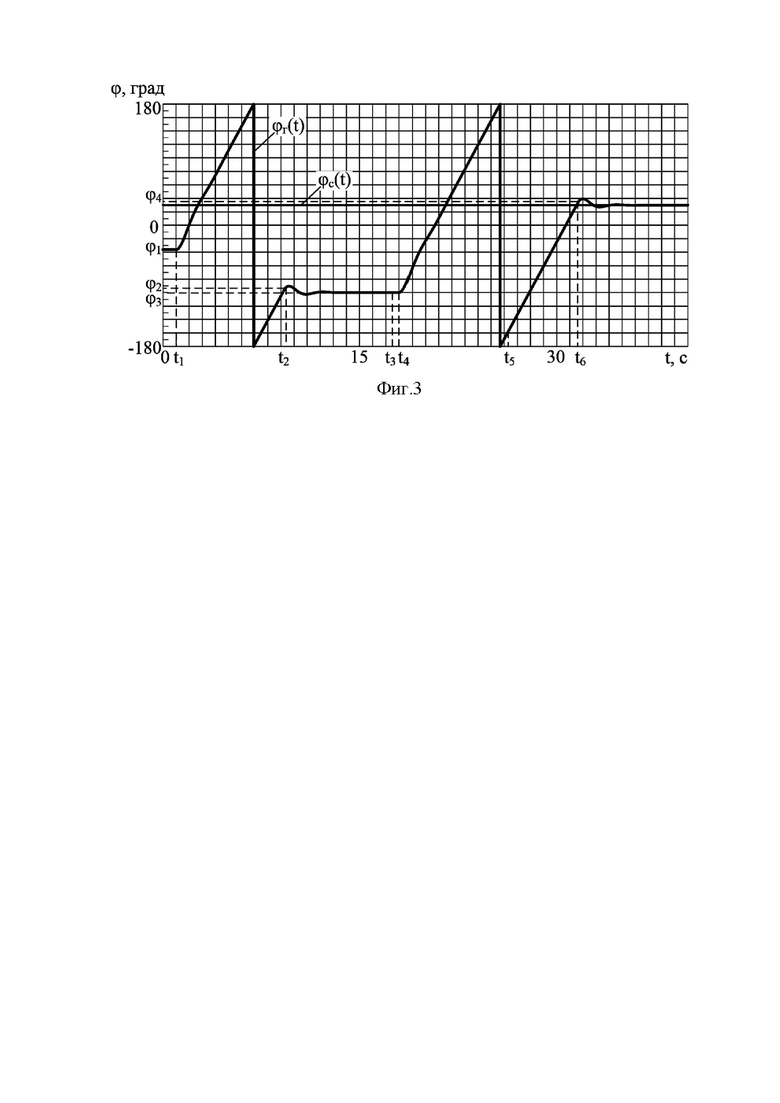
На фиг. 3 представлен график зависимости угла фазы синхронизируемого напряжения  от времени при осуществлении тестового и управляющего воздействий. Также показан график угла фазы напряжения сети
от времени при осуществлении тестового и управляющего воздействий. Также показан график угла фазы напряжения сети  , с которым синхронизируется напряжение генератора.
, с которым синхронизируется напряжение генератора.
Предлагаемый способ синхронизации возбужденной синхронной машины с сетью может быть осуществлён посредством устройства синхронизации (фиг.1), содержащего измерительно-преобразовательный блок 1, на вход которого поступают сигналы от трансформаторов напряжения, измеряющих напряжения синхронизируемых систем на обеих сторонах объединяющего выключателя (на схеме не показаны). Выходы измерительно-преобразовательного блока подключены к блоку-формирователю тестового воздействия 2, блоку-вычислителю уставок управляющего воздействия 3, к блоку-формирователю управляющего воздействия 4 и блоку-формирователю сигнала на включение объединяющего выключателя 5. Первый выход блока-формирователя тестового воздействия подключен к системе регулирования скорости вращения генератора (на схеме не показаны), второй – к блоку-вычислителю уставок управляющего воздействия 3. Блок-вычислитель уставок управляющего воздействия подключен выходом к блоку-формирователю управляющего воздействия, который передаёт сигнал в систему регулирования скорости вращения генератора (на схеме не показана). Блок-формирователь сигнала на включение объединяющего выключателя 5 подключен к системе управления объединяющего выключателя (на схеме не показана).
Синхронизация заключается в уравнивании на комплексной плоскости векторов напряжений одной n-фазной электроэнергетической системы с соответствующими векторами другой n-фазной электроэнергетической системы. Так как, в общем случае, векторы напряжений электроэнергетической системы сдвинуты относительно друг друга на один угол, то для описания сущности изобретения достаточно говорить о синхронизации двух напряжений одноимённых фаз, рассматриваемых двух электроэнергетических систем.
Для того чтобы два вектора синусоидального напряжения совпадали на комплексной плоскости необходимо выполнение трёх условий:
1) Условие равенства амплитуд этих напряжений.
2) Условие равенства частот этих напряжений.
3) Условие отсутствия фазового сдвига между векторами этих напряжений.
Первое условие достигается при помощи системы возбуждения синхронной машины или группы синхронных машин стандартными методами и не рассматривается настоящим изобретением.
Второе условие в настоящем изобретении рассматривается как равенство нулю относительной скорости. Под относительной скоростью следует понимать разность между частотами напряжений двух синхронизируемых электроэнергетических систем.
Третье условие в настоящем изобретении рассматривается как равенство нулю относительного угла. Под относительным углом следует понимать разность между текущими фазовым углом напряжения одной электроэнергетической системы и текущим фазовым углом напряжения другой электроэнергетической системы.
Второе и третье условия нельзя рассматривать отдельно друг от друга, потому что в настоящем изобретении, как и в прототипе, осуществляется их одновременное выполнение к концу синхронизации.
Также необходимо уточнить, что предлагаемый способ синхронизации можно применять для синхронизации возбуждённой синхронной машины, работающей на холостом ходу, с сетью; для синхронизации нагруженной синхронной машины с сетью; для синхронизации двух участков энергосистемы; для синхронизации нагруженных или ненагруженных синхронных машин между собой. Во всех перечисленных случаях синхронизируются напряжения двух электроэнергетических систем. Поэтому для удобства восприятия информации в описании сущности изобретения под одной электроэнергетической системой будет пониматься генератор, как объект, над которым совершают определённые действия для достижения условий синхронизации, а под другой электроэнергетической системой будет пониматься электрическая сеть, с параметрами которой синхронизируются параметры генератора.
Далее рассматривается синхронизация по предложенному способу. На вход измерительно-преобразовательного блока 1 поступают аналоговые сигналы напряжений генератора  и сети
и сети  , которые подвергают цифровой обработке и переводят в необходимые параметры: относительную скорость (фиг. 2), относительный угол, угол напряжения генератора (фиг. 3), угол напряжения сети (фиг. 3) и относительное ускорение. При поступлении команды на синхронизацию в момент времени
, которые подвергают цифровой обработке и переводят в необходимые параметры: относительную скорость (фиг. 2), относительный угол, угол напряжения генератора (фиг. 3), угол напряжения сети (фиг. 3) и относительное ускорение. При поступлении команды на синхронизацию в момент времени  фиксируют начальный угол напряжения генератора
фиксируют начальный угол напряжения генератора  (фиг.3). В этот же момент времени блоком 2 формируется и подаётся в систему регулирования скорости генератора тестовое воздействие . Генератор под действием тестового сигнала разгоняется до скорости
(фиг.3). В этот же момент времени блоком 2 формируется и подаётся в систему регулирования скорости генератора тестовое воздействие . Генератор под действием тестового сигнала разгоняется до скорости  . При этом, скорость примет своё установившееся значение не сразу, т.к. система имеет множество постоянных времени. В измерительно-преобразовательном блоке 1 фиксируется момент времени
. При этом, скорость примет своё установившееся значение не сразу, т.к. система имеет множество постоянных времени. В измерительно-преобразовательном блоке 1 фиксируется момент времени  (фиг.2), когда скорость примет установившееся значение, а также фиксируется угол напряжения генератора
(фиг.2), когда скорость примет установившееся значение, а также фиксируется угол напряжения генератора  (фиг.3). В этот же момент снимают тестовое воздействие с системы регулирования скорости. Из-за инерционности системы, скорость примет установившееся значение не сразу, поэтому ожидается момент времени
(фиг.3). В этот же момент снимают тестовое воздействие с системы регулирования скорости. Из-за инерционности системы, скорость примет установившееся значение не сразу, поэтому ожидается момент времени  , когда относительное ускорение и относительная скорость станут равны нулю. В этот же момент фиксируют угол
, когда относительное ускорение и относительная скорость станут равны нулю. В этот же момент фиксируют угол  (фиг.3) и угол сети
(фиг.3) и угол сети  . Информация об измеренных углах и окончании работы блока 2 поступает в блок-вычислитель уставок управляющего воздействия 3. В нём определяют изменение угла напряжения генератора
. Информация об измеренных углах и окончании работы блока 2 поступает в блок-вычислитель уставок управляющего воздействия 3. В нём определяют изменение угла напряжения генератора
за время  и
и
изменение угла напряжения генератора
за время  .
.
Далее определяют относительный угол между углом напряжения сети и углом напряжения генератора при изменении угла напряжения генератора на величину, равную изменению угла при тестовом воздействии:
 ,
,
где  – суммарный угол, на который повернулся вектор напряжения генератора при тестовом воздействии
– суммарный угол, на который повернулся вектор напряжения генератора при тестовом воздействии
 .
.
Наконец определяют длительность управляющего воздействия при установившемся значении относительной скорости:
где  – частота сети.
– частота сети.
После вычислений в блоке 3, блоком 4 формируется и подаётся в систему регулирования скорости генератора управляющее воздействие на изменение скорости от синхронной до , длительность которого равна
 .
.
После снятия управляющего воздействия и завершения переходного процесса, обусловленного этим снятием, производят контрольное измерение относительного угла, относительной скорости и относительного ускорения. Если эти параметры равны нулю или близки к нулю, блоком 5 формируется и подаётся сигнал на включение выключателя, если параметры не соответствуют нулевым условиям, то синхронизацию повторяют.
Для исследования выбрана трёхфазная синхронная машина, параметры которой представлены в таблице 1.
В момент времени  с осуществляют тестовое воздействие, разгоняющее генератор до относительной скорости
с осуществляют тестовое воздействие, разгоняющее генератор до относительной скорости  о.е./с В этот же момент времени измеряют угол напряжения генератора, который равен
о.е./с В этот же момент времени измеряют угол напряжения генератора, который равен  . В момент времени
. В момент времени  с относительная скорость принимает установившееся значение, при этом угол
с относительная скорость принимает установившееся значение, при этом угол  . Как только измерительно-преобразовательный блок 1 зафиксировал факт того, что скорость приняла установившееся значение, тестовое воздействие снимают и ожидают окончания переходного процесса, когда относительная скорость примет нулевое значение. В момент времени
. Как только измерительно-преобразовательный блок 1 зафиксировал факт того, что скорость приняла установившееся значение, тестовое воздействие снимают и ожидают окончания переходного процесса, когда относительная скорость примет нулевое значение. В момент времени  с относительная скорость принимает нулевое значение, а угол напряжения генератора
с относительная скорость принимает нулевое значение, а угол напряжения генератора  . Вычисляют угол, на который повернулся вектор напряжения генератора при тестовом воздействии:
. Вычисляют угол, на который повернулся вектор напряжения генератора при тестовом воздействии:

Далее измеряют угол напряжения сети и вычисляют относительный угол между углом напряжения сети и углом напряжения генератора при изменении угла напряжения генератора на величину, равную изменению угла при тестовом воздействии (отсчёт ведётся от -180° до +180°):


Определяется длительность управляющего воздействия при установившейся относительной скорости вращения:
Общая длительность управляющего воздействия составит:

В момент времени  с в систему регулирования подают управляющий сигнал длительностью
с в систему регулирования подают управляющий сигнал длительностью  с, а в момент времени
с, а в момент времени  с этот сигнал перестаёт действовать. После снятия управляющего сигнала и окончания переходного процесса проверяются условия равенства нулю относительных угла, скорости и ускорения. В случае выполнения этих условий генератор включают в сеть.
с этот сигнал перестаёт действовать. После снятия управляющего сигнала и окончания переходного процесса проверяются условия равенства нулю относительных угла, скорости и ускорения. В случае выполнения этих условий генератор включают в сеть.
Осуществление тестового воздействия на синхронную машину для формирования управляющего воздействия позволяет выполнить точную синхронизацию генератора с сетью без необходимости проведения трудоёмких расчётов переходных процессов в системе. Также пропадает надобность в информации о текущих параметрах генератора и связанных с ним систем. Всё это повышает точность и быстродействие синхронизации, особенно в условиях, когда параметры генератора и связанных с ним систем меняются во времени. При этом, синхронная машина будет включаться в сеть при нулевых или близких к нулю параметрах относительного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2011 |
|
RU2457597C1 |
| СПОСОБ БЫСТРОДЕЙСТВУЮЩЕГО УПРАВЛЕНИЯ ПЕРЕТОКОМ АКТИВНОЙ МОЩНОСТИ | 2011 |
|
RU2449446C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСТЕЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2017 |
|
RU2686079C1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
| СПОСОБ УДАЛЕННОЙ СИНХРОНИЗАЦИИ И ВОССТАНОВЛЕНИЯ НОРМАЛЬНОГО РЕЖИМА АВАРИЙНО РАЗДЕЛЕННОЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ С ГЕНЕРАТОРАМИ | 2020 |
|
RU2752693C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498494C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ СИНХРОНИЗИРУЮЩЕЙ МОЩНОСТИ СИНХРОННОЙ МАШИНЫ | 2014 |
|
RU2564539C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОБОРУДОВАНИЯ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ | 2009 |
|
RU2503111C2 |
| Способ регулирования скорости вращения ротора возбужденного синхронного агрегата | 1986 |
|
SU1387100A1 |
| Автономная электроэнергетическая установка с синхронными дизель-генераторами | 1982 |
|
SU1128364A1 |
Изобретение относится к области электротехники. Техническим результатом является повышение точности и быстродействия синхронизации синхронной машины с сетью. При осуществлении способа оказывают тестовое воздействие на синхронную машину и фиксируют угол, на который повернётся вектор напряжения за время тестового воздействия и время затухания переходного процесса, обусловленного этим воздействием. Определяют относительный угол между углом напряжения сети и углом напряжения генератора при повороте вектора напряжения генератора на угол, равный углу поворота вектора напряжения генератора за время тестового воздействия и время затухания переходного процесса. Определяют время, в течение которого генератор должен вращаться с постоянной скоростью при управляющем воздействии. Формируют и осуществляют управляющее воздействие вычисленной длительности. Ожидают окончания переходного процесса и проверяют равенство нулю или близость к нулевому значению относительной скорости, относительного угла и относительного ускорения. После этого включают синхронную машину в сеть. 3 ил., 1 табл.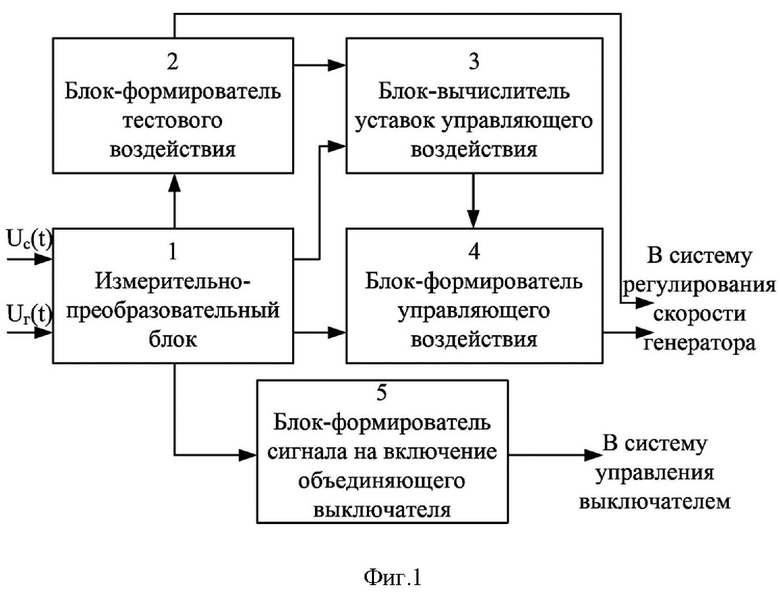
Способ синхронизации возбуждённой синхронной машины с сетью, включающий определение относительного угла, определение относительного ускорения, регулирование относительного угла в соответствии с движением ротора синхронной машины до достижения относительных скорости и угла нулевых значений, проверку равенств относительного угла, относительной скорости и относительного ускорения нулевым или близким к нулевым значениям, в момент достижения которых синхронную машину включают на параллельную работу с сетью, отличающийся тем, что перед началом регулирования относительного угла последовательно выполняют следующие действия:
1) осуществляют тестовое воздействие на систему регулирования скорости вращения синхронной машины, после чего
2) измеряют величину изменения фазы напряжения синхронной машины за время действия тестового воздействия и время затухания обусловленного им переходного процесса,
3) определяют длительность управляющего воздействия такой, чтобы после снятия управляющего воздействия и окончания обусловленного этим снятием переходного процесса параметры относительного движения приняли нулевое или близкое к нулю значения, после чего
4) осуществляют управляющее воздействие известной длительности и величины на систему регулирования скорости вращения синхронной машины.
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2011 |
|
RU2457597C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| US 4249088 A1, 03.02.1981 | |||
| Способ синхронизации генератора агрегата гарантированного питания с электрической сетью | 1988 |
|
SU1612353A1 |
| GB 1238664 A, 07.07.1971. | |||

