Изобретение относится к области измерительной техники и может быть использовано при градуировке акселерометров, предназначенных для измерения знакопеременных ускорений.
Известны способы градуировки линейных акселерометров на центрифугах, заключающиеся в установке акселерометра на роторе центрифуги таким образом, чтобы направление его измерительной оси (ИО) совпало с радиусом вращения ротора, воспроизведении ускорения заданной величины и знака, измерении выходного сигнала акселерометра, вычислении коэффициента преобразования и нелинейности функции преобразования [1].
Существенным недостатком указанного способа является наличие методической погрешности передачи размера ускорения, вызванной сочетанием неоднородности поля воспроизводимых ускорений по радиусу вращения ротора и неопределенности положения центра инерции чувствительного элемента акселерометра относительно контрольной точки радиуса центрифуги, указанная погрешность делает недостоверной оценку коэффициента преобразования и нелинейности функции преобразования.
Известен способ градуировки, где влияние этой методической погрешности уменьшается за счет использования дополнительного метода градуировки, например метода поворота акселерометра в гравитационном поле Земли [1]. При этом акселерометр сначала устанавливают на поворотное устройство, задают по измерительной оси ускорения различной величины и знака, измеряют выходной сигнал, определяют коэффициент преобразования.
После этого акселерометр устанавливают на центрифугу, проводя операции, описанные в предыдущем способе градуировки на центрифуге. Сравнивают коэффициенты преобразования, определенные двумя способами. Определяют систематический сдвиг между ними, рассчитывают расстояние между контрольной точкой радиуса и фактическим положением центра инерции чувствительного элемента, вводят на него поправку и подсчитывают с ее учетом коэффициент преобразования и нелинейность функции преобразования.
В другой разновидности этого метода [2] акселерометр перемещают по радиусу центрифуги до тех пор, пока приращение выходного сигнала на величину ускорения 9,81 м/с2, воспроизведенную центрифугой, не станет равным приращению выходного сигнала акселерометра на 9,81 м/с2 гравитационного ускорения. Измерив при этом угловую скорость вращения ротора, подсчитывают расстояние от оси вращения до центра инерции чувствительного элемента, после чего в полученные результаты вводят поправки. К недостаткам этого метода следует отнести значительную трудоемкость и недостаточную точность определения коэффициента преобразования и нелинейности функции преобразования. Особенно заметны эти погрешности для акселерометров с диапазонами измерений, значительно превышающими ±1 g. Это объясняется тем, что операции по определению фактического положения центра инерции проводят на начальном участке градуировочной характеристики, где из-за малости приращений выходного сигнала акселерометра значительную погрешность вносят средства измерений и случайные составляющие погрешностей акселерометра
Прототипом предлагаемого способа градуировки акселерометров является так называемый дифференциальный метод [3], суть которого состоит в следующем:
при воспроизведении ускорения одной и той же величины, например 90 м/с2, акселерометр поочередно устанавливают на роторе на расстоянии R1 и R2 от оси вращения. Затем точно измеряют расстояние ΔR=R1-R2 и, используя массив определенных при этом значений выходного сигнала акселерометра, находят фактическое положение центра инерции чувствительного элемента относительно оси вращения. Вводят поправку в результат измерения, за счет чего увеличивают точность определения коэффициента преобразования и нелинейности функции преобразования. К недостаткам способа относят значительную трудоемкость за счет установки акселерометра в каждой точке градуировки в 2-х положениях.
Предлагаемое изобретение направлено на сокращение трудоемкости и повышение точности определения коэффициента преобразования и нелинейности функции преобразования.
Технический результат достигается следующим образом:
акселерометр устанавливают на ротор центрифуги измерительной осью по радиусу вращения, совмещая расчетное значение центра инерции чувствительного элемента с контрольной точкой радиуса. Расчетное значение координат центра инерции чувствительного элемента акселерометра указывается в сборочном и габаритных чертежах. Примером могут служить все акселерометры, разработанные и выпускаемые НИИ физических измерений г. Пенза. При этом разработка приспособления, посредством которого акселерометр крепится к ротору центрифуги, ведется с учетом необходимости совмещения центра инерции с радиусом контрольной точки установки. После установки акселерометра на ротор воспроизводят совокупность ускорений aБ цj в заданном интервале, например от 22,5 до 90 м/с2, и измеряют в каждой точке градуировки выходной сигнал UБ j. Останавливают центрифугу. Измеряют выходной сигнал акселерометра UБ 0. Для смены знака измеряемого ускорения поворачивают корпус акселерометра на 180 градусов вокруг вертикали, проходящей через расчетное значение центра инерции чувствительного элемента, измеряют выходной сигнал акселерометра UМ 0 при отсутствии измеряемого ускорения. Затем воспроизводят ускорения aМ цj, равные по величине в каждой j-ой точке ускорению aБ цj, измеряют выходные сигналы UМ j. В случае равенства UБ 0 и UМ 0 допускается использовать одно значение U0. Измеренные акселерометром ускорения определяют по формулам
a
a
где j - порядковый номер точки градуировки в совокупности задаваемых ускорений;
UБ j, М j, aБ j, aМ j - выходной сигнал и измеренное ускорение в j точке при измерении положительных и отрицательных ускорений соответственно;
UБ 0, UМ 0 - выходные сигналы акселерометра, измеренные при установке на центрифуге при отсутствии измеряемого ускорения;
ацj - воспроизведенное центрифугой ускорение в j точке совокупности;
R - расстояние от оси вращения ротора до контрольной точки. Значение R берется из паспорта центрифуги;
r - расстояние от контрольной точки радиуса центрифуги до фактического положения центра инерции;
ξ - коэффициент, учитывающий неопределенность положения центра масс акселерометра,
а нелинейность функции преобразования и коэффициент преобразования определяют обработкой массива
aМБ j=f(UМБ j). (4)
Покажем правомерность приведенных для расчета формул.
Выходные сигналы акселерометра UБ и UМ можно представить в виде
UБ = Uo+KoΩ2(R+r) (5)
UM = Uo-KoΩ2(R-r) (6)
где Ко - коэффициент преобразования акселерометра,
Ω - yгловая скорость вращения стола центрифуги.
Из суммы - разности уравнений (5) и (6) для одного значения j получаем
Тогда измеренное акселерометром ускорение составит величину
a = KoΩ2R±KoΩ2r = KoΩ2R(1±ξ) = aц(1±ξ), (8)
что и подтверждает правильность записи уравнений (1) - (3). Знак числа ξ, полученный из уравнения (3), может быть как положительным, так и отрицательным, а значение aБ j по модулю может быть меньше значения aМ j.
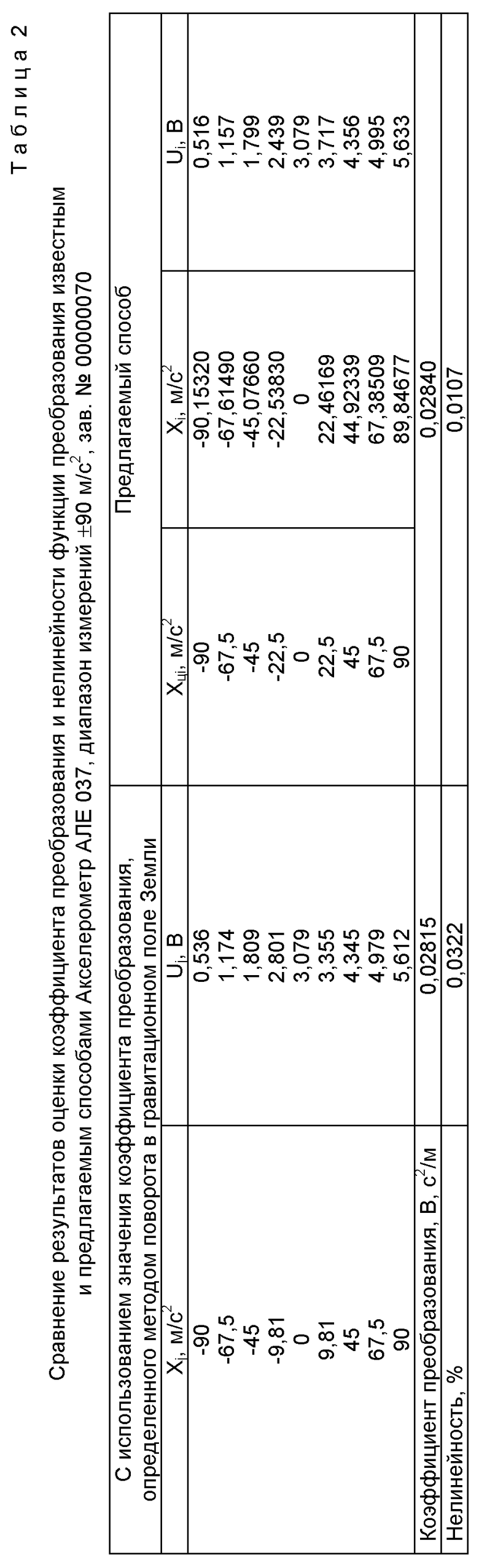
Эффективность предлагаемого способа градуировки подтверждена результатами испытаний серийных образцов акселерометров АЛЕ 037, разработанных и изготовленных в НИИФИ, и данными, представленными в таблицах 1 и 2.
В таблице 1 представлены результаты оценки достоверности предлагаемого способа по сравнению с методом, принятым за образцовый. Метод поворота в гравитационном поле Земли для акселерометра с диапазоном измерений ±9,81 м/с2 может быть образцовым при использовании прецизионных поворотного устройства и устройства контроля установки приспособления в горизонт. Для градуировки использовано поворотное устройство Р2 (Karl Zeiss, Германия) с точностью установки угла ±2". Для контроля установки в горизонт используется уровень фирмы "Leveltronic" (Швейцария) с точностью установки +2". Таким образом, общая погрешность установки углов не превысит 4", а погрешность градуировки sin 4"/sin 90o=0,0002=0,02%.
Градуировка предлагаемым способом проводилась на градуировочном комплексе ТЕМП-2 с погрешностью воспроизведения ускорения не более 0,02%.
Математическая обработка полученных массивов данных велась с использованием метода наименьших квадратов по методике ОСТ 92-4279-84. Расхождение в оценке коэффициента преобразования γKo составляет
Расхождение в оценке нелинейности функции преобразования составляет
ΔσA=0,00955-0,00978=0,00024%.
Полученные цифры позволяют считать предлагаемый метод достоверным.
В таблице 2 приведены результаты оценки акселерометра с диапазоном измерений ±90 м/с2 одним из известных методов и предлагаемым способом.
В известном способе методом поворота в гравитационном поле Земли определен коэффициент преобразования, а затем на центрифуге по приращению выходного сигнала к ускорению ±9,81 м/с2 введена поправка на неопределенность положения центра инерции.
Учитывая, что достоверность предлагаемого метода подтверждена, можно сделать следующие выводы: по сравнению с известным методом точность оценки коэффициента преобразования повышена на
а точность оценки нелинейности функции преобразования на 0,215%.
Источники информации
1. А.Е.Синельников. Низкочастотные линейные акселерометры. Методы и средства поверки и градуировки - М: Изд-во стандартов, 1979. - 175 с.
2. Аналоги заявляемого способа - с. 148-149 [1].
3. Прототип от заявляемого способа, с. 149 [1].
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК СЕЙСМОДАТЧИКОВ ДЛЯ СИСТЕМЫ АНТИСЕЙСМИЧЕСКОЙ ЗАЩИТЫ | 2001 |
|
RU2208815C2 |
| ГРАДУИРОВОЧНАЯ ЦЕНТРИФУГА | 1987 |
|
SU1840766A1 |
| ТОНКОПЛЕНОЧНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2006 |
|
RU2312319C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК БЫСТРОПЕРЕМЕННОГО ДАВЛЕНИЯ | 2001 |
|
RU2215275C2 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| ТОНКОПЛЕНОЧНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2004 |
|
RU2261420C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1990 |
|
RU2014581C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2138822C1 |

Изобретение предназначено для определения метрологических характеристик акселерометров. Технический результат - повышение достоверности определения параметров функции преобразования акселерометра и реализация возможности определения положения центра инерции чувствительного элемента. Способ заключается в воспроизведении ускорений и измерении выходных сигналов, одинаковых по величине, но противоположных по направлению. Величины приращений выходных сигналов в акселерометре используются для определения фактического положения центра инерции и введения поправок в результате измерений по формулам, приведенным в описании. 2 табл.
Способ определения статических характеристик акселерометров на центрифуге, заключающийся в установке их на роторе измерительной осью по радиусу вращения, воспроизведении совокупности ускорений заданной величины, измерении выходных сигналов, отличающийся тем, что при установке акселерометров на центрифугу совмещают расчетное значение центра инерции чувствительного элемента с контрольной точкой радиуса, а смену знака измеряемого ускорения осуществляют поворотом корпуса акселерометра вокруг вертикали, проходящей через расчетное значение центра инерции, измеряют выходной сигнал при отсутствии измеряемого ускорения, задают ускорения с параметрами воспроизведенной ранее совокупности, измеряют выходные сигналы, подсчитывают измеренные акселерометром ускорения по формулам
a
a
где Х, Хр - фактическое и расчетное значение координаты положения центра инерции относительно установочной плоскости;
j - порядковый номер точки градуировки в совокупности задаваемых ускорений;
Uj Б, Uj М, аj Б, аj М - выходной сигнал и измеренное ускорение в j-й точке при измерении положительных и отрицательных ускорений соответственно;
Uo Б, Uo М - выходные сигналы акселерометра, измеренные на центрифуге при отсутствии измеряемого ускорения;
ξ - коэффициент, учитывающий неопределенность положения центра масс акселерометра;
ацj - воспроизведенное центрифугой ускорение в j-й точке совокупности,
а коэффициент преобразования и нелинейность функции преобразования определяют обработкой массива экспериментальных данных
aj МБ= f(Uj МБ).
| Синельников А.Е | |||
| Низкочастотные линейные акселерометры | |||
| Методы и средства поверки и градуировки | |||
| - М.: Изд | |||
| стандартов, 1979, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННЫХ АКСЕЛЕРОМЕТРОВ | 1994 |
|
RU2117950C1 |
| Поворотная установка | 1986 |
|
SU1663562A1 |
| US 5895858, 20.04.1999. | |||

