Изобретение относится к области приборостроения, в частности к измерительной технике, и может быть использовано для градуировки и поверки точных приборов в метрологии, точном приборостроении и навигации.
Известно устройство для испытания угловых акселерометров, содержащее двигатель с укрепленной на его валу платформой, преобразователь угла поворота платформы, последовательно включенные фазоинвертор, элемент с нелинейной статической характеристикой и фильтр нижних частот, при этом выход преобразователя угла поворота платформы соединен с входом фазоинвертора, а выход фильтра нижних частот - с входом двигателя [1].
Наиболее близким по технической сущности является стенд для испытания приборов и узлов систем инерциальной навигации и управления, который содержит трехстепенной гироскоп, платформу для установки испытуемого объекта, закрепленную на оси наружной рамы гироскопа, датчик положения внутренней рамы гироскопа, подключенный через усилительно-преобразовательный блок к датчику момента наружной рамы гироскопа, а также датчик момента внутренней рамы гироскопа, с помощью которого создается управляющее воздействие на гироскоп. Датчики моментов выполнены в виде двухфазных асинхронных двигателей с двумя встречно включенными секциями обмотки управления. Наличие управляющего воздействия обуславливает прецессионное движение наружной рамы гироскопа относительно ее оси. Изменение величины управляющего момента позволяет варьировать угловую скорость прецессии, т. е. угловую скорость движения платформы [2].
Однако использование в качестве задатчика угловой скорости датчика момента внутренней рамы ограничивает точностные характеристики и создает определенные трудности в использовании устройства. Это объясняется тем, что точностные характеристики в создании управляющего момента определяются моментными характеристиками двухфазного двигателя, а само устройство имеет области устойчивых режимов работы и области неустойчивости.
Задачей изобретения является повышение стабильности скорости углового движения и расширение области использования устройства.
Поставленная задача решается тем, что в устройство, содержащее трехстепенной гироскоп, платформу для установки испытуемого объекта, закрепленную на оси наружной рамы гироскопа, датчик угла внутренней рамы гироскопа, подключенный через усилительный блок к датчику момента наружной рамы гироскопа, дополнительно введен поворотный блок, а центр масс гиромотора смещен относительно оси подвеса внутренней рамы и наружная рама гироскопа закреплена на шпинделе поворотного блока.
Схема предлагаемого устройства показана на чертеже, где 1 - платформа для установки испытуемого объекта, 2 - опора, 3 - внутренняя рама трехстепенного гироскопа - кожух с гиромотором, центр масс О которого смещен относительно оси Х подвеса кожуха ротора на расстояние е вдоль оси вращения ротора. Гиромотор с помощью опор кожуха подвешен в наружной раме 4. Относительно оси подвеса наружной рамы Y прибор сбалансирован. Ось вращения ротора Z удерживается на направлении перпендикуляра к оси наружной рамы с помощью системы межрамочной коррекции (МРК), состоящей из датчика угла 5, установленного на оси подвеса кожуха, усилительного блока 6 и датчика момента 7, расположенного на оси вращения наружной рамы. Наружная рама 3 закреплена в шпинделе 8 поворотного блока 9.
Принцип работы устройства заключается в том, что под действием ускорения силы тяжести возникает момент, приложенный к внутренней раме 4 гироскопа и определяемый соотношением
Mвх=ml•g cosβcosγ (1)
где ml - маятниковость ротора гироскопа,
β - угол между вектором Н и осью Z,
γ - угол поворота гироскопа вокруг оси X.
В соответствии со свойством трехстепенного гироскопа и с учетом малости угла β этот момент вызывает прецессию вокруг оси наружной рамы 3 с угловой скоростью
где Н - кинетический момент гироскопа.
Момент Мвх уравновешивается гироскопическим моментом
Из приведенных соотношений видно, что в состоянии равновесия наружная рама 3 гироскопа будет совершать вращение с постоянной угловой скоростью.
Уравнения моментов относительно осей подвеса наружной рамы и кожуха (без учета членов второго порядка малости, перекрестных ускорений и скорости вращения основания) можно записать в следующем виде

где Jх, Jу, - моменты инерции гиромотора и всей подвижной части прибора относительно осей х и у соответственно,
Вх, By - удельные моменты демпфирования, приведенные к осям х и у,
My - неучтенные возмущающие моменты (моменты трения, тяжения и др.), действующие относительно оси х,
М(β) - момент коррекционного двигателя, приведенный к оси наружной рамы.
В левых частях уравнений (4), (5) записаны моменты, определяющие собственное движение прибора, а в правых - управляющие и возмущающие моменты, определяющие его вынужденное движение. Управляющим моментом для гироскопа является момент инерционных сил Мвх=ml•g cosγ. Остальные моменты в правых частях являются возмущающими, обуславливающими погрешности задания угловой скорости. Уравнения собственного движения ГИЛУ, получаемые из (4) и (5), позволяют записать соотношения для определения собственной частоты ω0 и относительного коэффициента демпфирования ξ в виде
Последние соотношения определяют возможный диапазон воспроизведения переменных угловых скоростей.
Степень отработки конструкций гироскопов достаточно высока, что позволяет обеспечить высокую стабильность скорости вращения. В настоящее время погрешность измерения, которая обеспечивается стабильностью скорости вращения, оценивается тысячными долями процента.
Литература
1. Авторское свидетельство СССР 1007023, кл. G 01 Р 21/00, 1980.
2. Чулкова И.С., Павлов И.В. Стенд для испытания приборов и узлов систем инерциальной навигации и управления. - Труды метрологических институтов СССР. Исследования в области измерения угловых параметров движения. Л., 1977, с.10-14.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2208764C1 |
| Устройство для воспроизведения угловых скоростей и ускорений | 1989 |
|
SU1721518A1 |
Использование для градуировки и поверки точных приборов в метрологии, точном приборостроении и навигации. Сущность: устройство содержит трехстепенной гироскоп, платформу для установки испытуемого объекта, закрепленную на оси наружной рамы гироскопа, датчик угла внутренней рамы гироскопа, подключенный через усилительный блок к датчику момента наружной рамы гироскопа, поворотный блок. Центр масс гиромотора смещен относительно оси подвеса внутренней рамы. Наружная рама гироскопа закреплена на шпинделе поворотного блока. Технический результат: повышение стабильности скорости углового движения и расширение области использования устройства. 1 ил.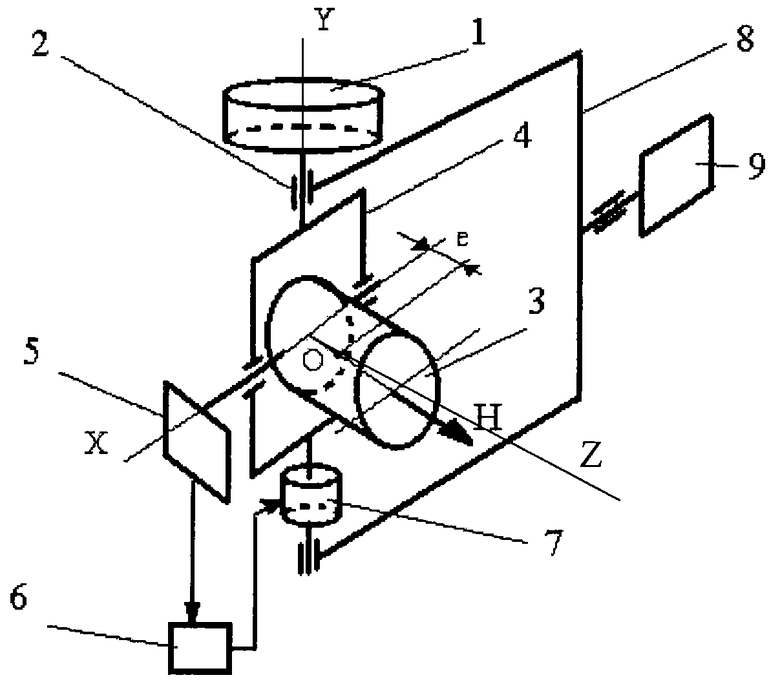
Устройство для воспроизведения углового движения, содержащее трехстепенной гироскоп, платформу для установки испытуемого объекта, закрепленную на оси наружной рамы гироскопа, датчик угла внутренней рамы гироскопа, подключенный через усилительный блок к датчику момента наружной рамы гироскопа, отличающееся тем, что в него введены поворотный блок, центр масс гиромотора смещен относительно оси подвеса внутренней рамы, а наружная рама закреплена на шпинделе поворотного блока.
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 1997 |
|
RU2121134C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| JP 62206413 A, 10.09.1987 | |||
| US 4884771 A, 05.12.1989. | |||

