Изобретение относится к области технической кибернетики и предназначено для управления поворотом безрельсовых колесных транспортных средств.
Известно устройство для управления колесным транспортным средством, содержащее рулевое колесо, установленное на валу, следящий сервопривод, систему рычагов и тяг для связи сервопривода с управляющими колесами, датчик отклонения направления движения от заданного (см. патент Великобритании 1426316, кл. G 3 R, опублик. 25.02.76).
Недостатком такого устройства является недостаточная надежность из-за сложности конструкции, обусловленной наличием электронных элементов, механических и гидравлических схем.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является устройство для управления транспортным средством, содержащее рулевое колесо, установленное на валу, следящий по перемещению сервопривод, систему рычагов и тяг для связи сервопривода с управляемыми колесами, датчик отклонения направления от заданного, вращающееся кольцо, связанное с валом рулевого колеса механической передачей, корпус, расположенный внутри кольца соосно с ним, причем наружная поверхность корпуса выполнена цилиндрической с двумя симметричными криволинейными участками, образующими выемку. При этом управляющий механизм сервопривода, установленный на кольце, снабжен золотником, подпружиненным к наружной поверхности корпуса, и связан с сервоприводом гибкими трубопроводами, а датчик отклонения направления движения от заданного выполнен в виде гироскопа с двумя степенями свободы, ротор которого имеет горизонтальную ось вращения, вертикальная ось вращения гироскопа совпадает с осью вращения кольца. Гироскоп расположен внутри корпуса и соединен с ним (а.с. СССР 1037216, МПК G 05 D 1/03).
Основными недостатками такого устройства для управления транспортным средством являются пониженная точность датчика отклонения направления движения от заданного из-за суточного вращения Земли и ограниченные функциональные возможности, позволяющие поддерживать только траектории, близкие к прямолинейным.
Предлагаемым изобретением решается задача повышения точности работы устройства и расширения функциональных возможностей, обеспечивающих движение машины по траектории произвольной формы.
Для достижения этого технического результата в устройстве для управления колесным транспортным средством, содержащем рулевое колесо, установленное на валу, следящий по перемещению сервопривод с управляющим механизмом, систему рычагов и тяг для связи сервопривода с управляемыми колесами, датчик отклонения направления движения от заданного, вращающееся кольцо, связанное с валом рулевого колеса механической передачей, корпус, расположенный внутри кольца соосно с ним, причем наружная поверхность корпуса выполнена цилиндрической с двумя симметричными криволинейными участками, образующими выемку, при этом управляющий механизм сервопривода, установленный на кольце, снабжен золотником, подпружиненным к наружной поверхности корпуса, и связан с сервоприводом гибкими трубопроводами, датчик отклонения направления движения от заданного выполнен в виде приемника спутниковой навигационной системы, пропорционально преобразующего отклонение от заданного направления движения колесного транспортного средства в электрический сигнал, подключенного через блок управления к управляющему электродвигателю, связанному механической передачей с корпусом.
Повышение точности работы устройства обеспечивается тем, что на показания датчика отклонения направления движения от заданного не будет оказывать влияние суточное вращение Земли, так как этот датчик выполнен в виде приемника спутниковой навигационной системы.
Расширение функциональных возможностей достигается тем, что помимо обеспечения движения по траектории, близкой к прямолинейной, имеется возможность движения по траектории произвольной формы, предварительно заданной в приемнике спутниковой навигационной системы.
Предлагаемое изобретение поясняется чертежом, где изображена схема устройства.
Корпус 1 имеет ось вращения 2, вокруг которой свободно поворачивается.
Наружная поверхность корпуса 1 выполнена цилиндрической, состоящая из участка 3, выполненного по дуге окружности с центром на оси вращения, и двух симметричных криволинейных участков 4, образующих выемку. Концентрично относительно оси 2 вращения корпуса расположено кольцо 5. На кольце выполнен зубчатый венец, входящий в зацепление с шестерней 6, установленной на валу рулевого колеса 7. На корпусе 1 соосно с ним установлено червячное колесо 8, входящее в зацепление с червяком 9, находящимся на валу управляющего двигателя 10. Управляющий двигатель 10 получает питание от блока управления 11, связанного с датчиком отклонения направления движения от заданного, выполненного в виде приемника 12 спутниковой навигационной системы, жестко укрепленным на кузове 13 транспортного средства. Приемник 12 спутниковой навигационной системы предназначен для пропорционального преобразования отклонения от заданного направления движения колесного транспортного средства в электрический сигнал. На кузове 13 транспортного средства укреплен датчик угла поворота 14, связанный с осью 2 корпуса 1. Датчик угла поворота 14 определяет угол поворота корпуса 1 относительно кузова 13 и электрически связан с блоком управления 11. Червячное колесо 8, червяк 9, управляющий двигатель 10, блок управления 11 и датчик угла поворота 14 образуют систему слежения по угловому перемещению между направлением движения 15, определяемым приемником 12 спутниковой навигационной системы и направлением продольной оси 16 корпуса 1 таким образом, чтобы эти два направления 15 и 16 совпадали при выполнении любых маневров мобильной машиной.
На рулевом валу 7 установлено рулевое колесо 17. Управляемые колеса 18, связанные между собой системой тяг и рычагов общепринятой конструкции 19, управляются исполнительным цилиндром 20 сервопривода, например, гидравлического типа. Насос 21 сервопривода, приводимый от основного двигателя, связан с исполнительным цилиндром 20 системой гибких трубопроводов 22 и 23 через управляющий механизм 24 сервопривода, расположенный на кольце 5. Управляющий механизм 24 имеет золотник 25, подпружиненный к наружной поверхности корпуса 1. При относительном повороте кольца 5 относительно корпуса 1 золотник 24 поворачивается в ту или иную сторону, обеспечивая исполнительным цилиндром 20 поворот управляемых колес на угол, пропорциональный углу поворота золотника 25. Поворот золотника 25, соответствующий движению по участку 4 (угол 26), соответствует повороту управляемых колес на угол 27, максимально возможный.
Перед началом движения приемник 12 спутниковой навигационной системы устанавливается в один из двух режимов работы: режим компаса или режим движения по заданной ранее в памяти приемника траектории, ориентированной относительно окружающей среды (см. книги: Соловьев Ю.А. Система спутниковой навигации. М.: Эко-Тренд, 2000, 267 с. GPS-12, GPS-12 XI. Руководство по эксплуатации, GARMIN, 1997, 62 с.). В случае появления угла рассогласования - отклонения текущего направления продольной оси кузова 13 транспортного средства от требуемого (заданного режимом компаса для прямолинейного движения или текущего направления траектории в режиме движения по произвольной траектории) приемником 12 спутниковой навигационной системы подается на блок управления 11 электрический сигнал, величина и направление которого зависят от величины и направления угла рассогласования. В соответствии с полученным сигналом блок управления 11 включает управляющий двигатель 10 и через механическую передачу, а именно червячное колесо 8 и червяк 9, поворачивает корпус 1 на угол, равный по величине углу рассогласования, но противоположно направленный.
Устройство работает следующим образом. При прямолинейном направлении движения, совпадающем с заданным, положение органов управления соответствует изображенному на чертеже. В случае отклонения транспортного средства от заданного направления, т.е. при появлении угла рассогласования, кузовов 13 транспортного средства будет повернут на этот угол рассогласования. Приемник 12 спутниковой навигационной системы, поскольку он повернется вместе с кузовом 13, выдает сигнал, пропорциональный углу рассогласования, на блок управления 11, который включит управляющий двигатель 10. Сигнал обратной связи будет поступать от датчика угла поворота 14 на блок управления 11. Управляющий двигатель 10 через механическую передачу, а именно червячное колесо 8 и червяк, повернет корпус 1 на угол, равный углу рассогласования, но направленный в противоположную сторону, т.е. направление продольной оси 16 корпуса 1 будет всегда соответствовать требуемому направлению движения 15. При этом произойдет поворот кольца 5 (вместе с кузовом 13) относительно корпуса 1 на угол, соответствующий углу отклонения транспортного средства. Золотник 25 выйдет из нейтрального положения и, скользя по криволинейному участку 4, повернется, включая сервопривод (следящий по перемещению) поворота управляемых колес 18. За счет поворота управляемых колес 18 транспортное средство возвратится на направление движения. По мере возвращения угол поворота кольца 5 относительно корпуса 1 будет уменьшаться и при полном возвращении золотник 25 займет первоначальное нейтральное положение между участками 4, а колеса 18 - положение требуемого направления движения. Для осуществления поворота водитель должен вращать рулевое колесо 17 в нужную строну. Кольцо 5 через зубчатую передачу получит отклонение на угол, пропорциональный углу поворота рулевого колеса. Золотник 25, выйдя из нейтрального положения, повернет через управляющий механизм 24 и исполнительный цилиндр 20 управляемые колеса 18 на угол, пропорциональный углу поворота рулевого колеса 17. Транспортное средство начнет поворот, при этом корпус 1 останется в прежнем положении за счет работы управляющего двигателя 10. Кольцо 5, поворачиваясь вместе с кузовом 13, уменьшает угол поворота относительно корпуса 1, управляемые колеса возвращаются в положение, обеспечивающее требуемое направление движения, а золотник 25 - в нейтральное положение (произойдет автоматический выход транспортного средства из поворота). Изменение радиуса поворота может регулироваться поворотом рулевого колеса 17. При повороте рулевого колеса 17 на большой угол золотник 25 будет скользить по поверхности 3, не изменяя положения колес, повернутых на максимально возможный угол.
Использование предлагаемого изобретения по сравнению с прототипом обеспечивает повышение точности работы устройства, расширение функциональных возможностей путем обеспечения возможности движения колесного транспортного средства по траектории, близкой к прямолинейной, и по предварительно заданной траектории произвольной формы.
Изобретение относится к устройствам управления колесными транспортными средствами. Корпус устройства установлен с возможностью поворота вокруг оси вращения. Концентрично с осью вращения корпуса расположено вращающееся кольцо, связанное с валом рулевого колеса механической передачей. Корпус размещен внутри кольца. Наружная поверхность корпуса выполнена цилиндрической с двумя симметричными криволинейными участками, образующими выемку. К наружной поверхности корпуса подпружинен золотник управляющего механизма следящего по перемещению сервопривода. Этот управляющий механизм связан с сервоприводом гибкими трубопроводами. Сервопривод соединен с управляемыми колесами системой рычагов и тяг. Датчик отклонения направления движения от заданного выполнен в виде приемника спутниковой навигационной системы, пропорционально преобразующего отклонение от заданного направления движения колесного транспортного средства в электрический сигнал. Датчик отклонения направления движения от заданного подключен через блок управления к управляющему электродвигателю, связанному механической передачей с корпусом. Технический результат заключается в повышении точности работы устройства для управления колесным транспортным средством и расширении функциональных возможностей этого устройства путем обеспечения возможности движения машины по траектории произвольной формы. 1 ил.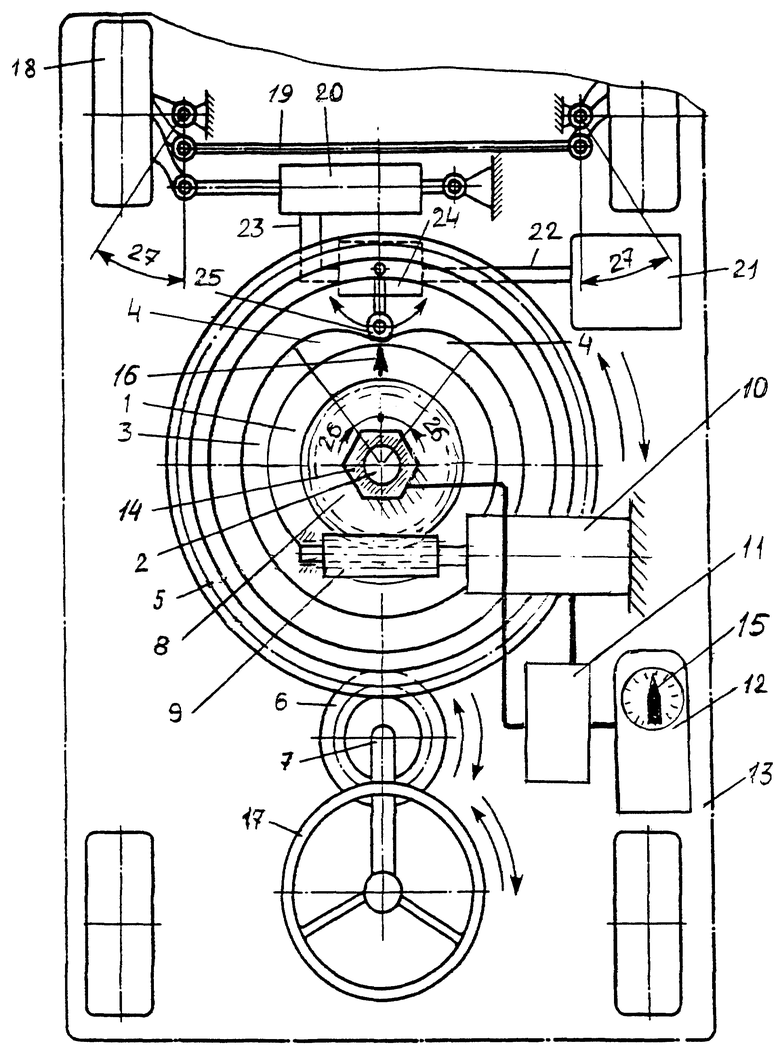
Устройство для управления колесным транспортным средством, содержащее рулевое колесо, установленное на валу, следящий по перемещению сервопривод с управляющим механизмом, систему рычагов и тяг для связи сервопривода с управляемыми колесами, датчик отклонения направления движения от заданного в виде приемника спутниковой навигационной системы, пропорционально преобразующего отклонение от заданного направления движения колесного транспортного средства в электрический сигнал рассогласования, изменяющий свой знак в зависимости от направления отклонения, вращающееся кольцо, связанное с валом рулевого колеса механической передачей, корпус с вертикальной осью вращения и продольной осью симметрии, расположенный внутри кольца соосно с ним, причем наружная поверхность корпуса выполнена цилиндрической с двумя симметричными криволинейными участками, образующими выемку, при этом управляющий механизм сервопривода, установленный на кольце, снабжен золотником, подпружиненным к наружной поверхности корпуса, и связан с сервоприводом гибкими трубопроводами, блок управления и датчик угла поворота корпуса относительно кузова транспортного средства, причем корпус связан механической передачей с управляющим электродвигателем, обеспечивающим поворот корпуса, причем блок управления предназначен для поворота корпуса за счет вращения электродвигателя на основании величины и направления сигнала рассогласования и показаний датчика угла поворота корпуса относительно кузова таким образом, чтобы постоянно обеспечивалось совпадение требуемого направления движения, определяемого приемником спутниковой навигационной системы, и направления продольной оси корпуса.
| Устройство для управления транспортным средством | 1982 |
|
SU1037216A1 |
| Способ дифференциальной диагностики амилоидоза | 1981 |
|
SU971276A1 |
| Устройство для упаковки предметовВ плЕНКу | 1979 |
|
SU821296A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "САПСО" | 2005 |
|
RU2286696C1 |
| US 5774069 A, 30.06.1998 | |||
| ЕР 0913751 А1, 06.05.1999 | |||
| МЕХАНИЧЕСКАЯ НАВОДКА ДЛЯ ПРИВОДНЫХ РЕМНЕЙ | 1929 |
|
SU16958A1 |
| Теплоизоляционный материал | 1974 |
|
SU494499A1 |

