Изобретения относятся к области исследований управляемого движения мобильной машины, данные которых могут быть использованы при разработке систем автоматического управления.
Известен способ курсового управления мобильной машиной при движении по траектории произвольной формы, включающий использование рулевого колеса с рулевым приводом, визуальное определение отклонений параметров текущего положения мобильной машины от требуемых параметров в предполагаемой точке входа мобильной машины после коррекции на требуемую траекторию и вывод мобильной машины на требуемую траекторию путем изменения угла поворота управляемых колес в зависимости от имеющихся отклонений. При этом в качестве параметров текущего положения мобильной машины используют координаты направляющей точки мобильной машины (Литвинов А.С. Управляемость и устойчивость автомобиля / А.С.Литвинов. - М.: Машиностроение, 1971, с.135-136).
Основным недостатком описанного способа является низкая точность управления мобильной машиной вследствие достаточно больших отклонений от требуемой траектории, так как точность управляющих воздействий на рулевое управление определяется профессиональным мастерством водителя и его физическим состоянием, а коррекция отклонений от требуемой траектории характеризуется большим временем реакции водителя.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ курсового управления мобильной машиной при движении по траектории произвольной формы, включающий использование спутниковой навигационной системы с приемником, пропорционально преобразующим отклонение от требуемой траектории мобильной машины в электрический сигнал, величина и направление которого зависят от величины и направления отклонения, определение отклонений параметров текущего положения мобильной машины в предполагаемой точке входа мобильной машины после коррекции на требуемую траекторию, заранее заданную в памяти приемника спутниковой навигационной системы, и вывод мобильной машины при достижении предельно допустимых отклонений на требуемую траекторию путем изменения угла поворота управляемых колес в зависимости от имеющихся отклонений при отсутствии отклонений в момент входа на требуемую траекторию. В качестве параметров текущего положения мобильной машины используют координаты направляющей точки мобильной машины в плане (см. патент 2192033 Российская Федерация, МПК7 G05D 1/02).
Основным недостатком способа курсового управления мобильной машиной при движении по траектории произвольной формы является пониженная точность управления мобильной машиной вследствие возможного несоответствия курсового угла, кривизны траектории движения мобильной машины от направления касательной к требуемой траектории и кривизны траектории в точке входа мобильной машины на требуемую траекторию параметрам положения мобильной машины в момент входа на требуемую траекторию.
Известно устройство для курсового управления мобильной машиной, содержащее рулевое колесо, установленное на валу, следящий по перемещению сервопривод, систему рычагов и тяг для связи сервопривода с управляемыми колесами, датчик отклонения направления движения от заданного, вращающееся кольцо, связанное с валом рулевого колеса механической передачей, корпус, расположенный внутри кольца соосно с ним, причем наружная поверхность корпуса выполнена цилиндрической с двумя симметричными криволинейными участками, образующими выемку. При этом управляющий механизм сервопривода, установленный на кольце, снабжен золотником, подпружиненным к наружной поверхности корпуса, и связан с сервоприводом гибкими трубопроводами, а датчик отклонения направления движения от заданного выполнен в виде гироскопа с двумя степенями свободы, ротор которого имеет горизонтальную ось вращения, вертикальная ось вращения гироскопа совпадает с осью вращения кольца. Гироскоп расположен внутри корпуса и соединен с ним (авторское свидетельство СССР №1037216, МПК G 05 D 1/03).
Основными недостатками такого устройства являются пониженная точность управления мобильной машиной вследствие невысокой точности отклонения направления движения от заданного из-за того, что датчик отклонения направления движения от заданного выполнен в виде гироскопа, который не учитывает влияние суточного вращения Земли, и ограниченные функциональные возможности, позволяющие поддерживать только траектории, близкие к прямолинейным.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является устройство для управления мобильной машиной, содержащее приемник спутниковой навигационной системы с заранее заданной в его памяти требуемой траекторией, блок управления, соединенный с приемником спутниковой навигационной системы и создающий на основании таких параметров текущего положения мобильной машины, как текущие координаты направляющей точки мобильной машины в плане, воспринимаемых приемником спутниковой навигационной системы, от требуемых значений на требуемой траектории, корректирующий электрический сигнал, изменяющий свой знак и форму в зависимости от направления отклонения мобильной машины, электродвигатель, управляемый корректирующим электрическим сигналом, систему коррекции поворота управляемых колес, приводимую в действие от вала электродвигателя через механическую передачу (патент 2192033 Российская Федерация, МПК7 G05D 1/02).
Основными недостатком такого устройства для курсового управления мобильной машиной являются пониженная точность управления мобильной машиной из-за учета при управлении малого количества параметров движения - только координат направляющей точки в плане.
Предлагаемыми изобретениями решается задача повышения точности управления мобильной машиной при движении по траектории произвольной формы.
Для достижения этого технического результата в способе курсового управления мобильной машиной при движении по траектории произвольной формы, включающем использование спутниковой навигационной системы с приемником, определение отклонений параметров текущего положения мобильной машины в предполагаемой точке входа мобильной машины после коррекции на требуемую траекторию, заранее заданную в памяти приемника спутниковой навигационной системы, вывод мобильной машины при достижении предельно допустимых отклонений на требуемую траекторию путем изменения угла поворота управляемых колес в зависимости от имеющихся отклонений, при отсутствии отклонений в момент входа на требуемую траекторию, при этом в качестве параметров текущего положения мобильной машины принимают координаты направляющей точки мобильной машины в плане, согласно изобретению определяют дополнительно отклонения таких параметров текущего положения мобильной машины, как курсового угла от направления касательной к требуемой траектории и кривизны траектории движения мобильной машины от кривизны требуемой траектории в точке входа мобильной машины на требуемую траекторию.
Для достижения названного технического результата устройство для курсового управления мобильной машиной при движении по траектории произвольной формы, содержащее приемник спутниковой навигационной системы с заранее заданной в его памяти требуемой траекторией, блок управления, соединенный с приемником спутниковой навигационной системы и создающий на основании отклонений таких параметров текущего положения мобильной машины, как текущие координаты направляющей точки в плане, воспринимаемых приемником спутниковой навигационной системы, от требуемых значений, корректирующий электрический сигнал, изменяющий свой знак и форму в зависимости от направления отклонения мобильной машины, электродвигатель, управляемый корректирующим электрическим сигналом, систему коррекции поворота управляемых колес, приводимую в действие от вала электродвигателя через механическую передачу, согласно изобретению снабжено датчиком среднего угла поворота управляемых колес, характеризующим кривизну траектории и соединенным с блоком управления, определяющим на основании показаний датчика среднего угла поворота управляемых колес отклонения текущей кривизны траектории и определяющим также на основании значений текущих координат направляющей точки мобильной машины в плане, полученных от приемника спутниковой навигационной системы, отклонения курсового угла от требуемых значений.
Повышение точности управления мобильной машиной при движении по траектории произвольной формы обусловлено обеспечением соответствия координат направляющей точки мобильной машины в плане, курсового угла, кривизны траектории движения мобильной машины таким же параметрам требуемой траектории, заранее заданной в памяти приемника спутниковой навигационной системы, в момент входа мобильной машины на требуемую траекторию при увеличении количества учитываемых параметров движения и определении отклонения курсового угла от направления касательной к требуемой траектории и кривизны траектории движения мобильной машины от кривизны требуемой траектории в точке входа мобильной машины на требуемую траекторию.
Способ курсового управления мобильной машиной при движении по траектории произвольной формы осуществляется следующим образом.
При движении мобильной машины, в качестве которой может быть использован автомобиль, по траектории произвольной формы используют спутниковую навигационную систему с приемником, антенна которого жестко связана с кузовом мобильной машины. Требуемую траекторию движения мобильной машины заранее задают в памяти приемника спутниковой навигационной системы, причем в определенный момент времени на положение мобильной машины оказывают корректирующее управляющее воздействие, если она отклоняется от требуемой траектории. Определяют отклонения таких параметров текущего положения мобильной машины в предполагаемой точке входа мобильной машины от параметров после коррекции на требуемую траекторию, заранее заданную в памяти приемника спутниковой навигационной системы, как координат направляющей точки мобильной машины в плане, курсового угла от направления касательной к требуемой траектории и кривизны траектории движения мобильной машины от кривизны требуемой траектории в точке входа мобильной машины на требуемую траекторию.
В качестве параметров текущего положения мобильной машины принимают координаты направляющей точки мобильной машины в плане, курсовой угол, кривизну траектории движения мобильной машины. Затем производят вывод мобильной машины при достижении предельно допустимых отклонений на требуемую траекторию путем изменения угла поворота управляемых колес в зависимости от имеющихся отклонений при отсутствии отклонения в момент входа на требуемую траекторию.
Конструкция устройства для курсового управления мобильной машиной при движении по траектории произвольной формы поясняется схемой.
На схеме отмечено:
- XOY - неподвижная система отсчета;
- А - направляющая точка мобильной машины 1 при движении по текущей траектории 2;
- х0, у0 - координаты точки А;
- А1 - направляющая точка мобильной машины 1 при достижении требуемой траектории 3;
- х1, у1 - координаты точки А1,
- α0 - средний угол поворота управляемых колес 4 мобильной машины 1 при движении по текущей траектории 2;
- α1 - средний угол поворота управляемых колес 4 мобильной машины 1 при достижении требуемой траектории 3;
ϕ0 - курсовой угол мобильной машины при движении по текущей траектории 2;
ϕ1 - курсовой угол мобильной машины при достижении требуемой траектории 3;
- штрихпунктирная линия - положение мобильной машины 1 при достижении требуемой траектории 3.
Устройство для курсового управления мобильной машиной при движении по траектории произвольной формы содержит приемник 5 спутниковой навигационной системы с заранее заданной в его памяти требуемой траекторией, воспринимающий отклонения текущих координат х0, у0 направляющей точки А мобильной машины 1 в плане от значений, определяемых требуемой траекторией 3, координаты которой заранее заданы в памяти приемника 5, датчик 6 среднего угла поворота управляемых колес. За направляющие точки А и А1 принимается центр передней оси 7 мобильной машины 1 при ее движении по текущей траектории 2 и при достижении требуемой траектории 3 соответственно. Датчик 6 среднего угла поворота управляемых колес 4, характеризующий кривизну траектории, предназначен для определения отклонения текущего среднего угла поворота α0 управляемых колес 4 от требуемого, то есть текущей кривизны траектории 2 от требуемой 3. С датчиком 6 и приемником 5 спутниковой навигационной системы соединен блок управления 8, обеспечивающий питание электродвигателя 9. Блок управления 8 выполнен в виде компьютера и предназначен для обработки поступивших показаний отклонений текущего среднего угла поворота α0 управляемых колес 4 от требуемого и текущих координат х0, у0 в плане направляющей точки А мобильной машины 1 от требуемых, определения по поступившим показаниям отклонения текущего курсового угла ϕ0 от требуемого значения, формирования на этом основании корректирующего электрического сигнала, определяющего направление вращения вала электродвигателя 9 и изменяющего свой знак и форму в зависимости от направления отклонения мобильной машины 1. Таким образом, при движении мобильной машины 1 осуществляется определение отклонений текущих координат х0, у0 в плане направляющей точки А мобильной машины 1, текущего среднего угла поворота α0 управляемых колес 4, текущего курсового угла ϕ0 от требуемых и их коррекция до полного соответствия данных параметров параметрам требуемой траектории 3 в точке входа мобильной машины 1 на требуемую траекторию 3.
Система коррекции поворота управляемых колес 4 образована механической передачей 10, зубчатое колесо которой расположено на рулевом валу 11, приводимой во вращение валом электродвигателя 9, и системой рулевого управления, содержащей рулевой вал 11, рулевой механизм 12, рулевую сошку 13, продольную 14 и поперечную 15 тяги, поворотные рычаги 16.
Устройство для курсового управления мобильной машиной при движении по траектории произвольной формы работает следующим образом.
В определенный момент времени мобильная машина 1 находится на некотором удалении от требуемой траектории 3, заранее заданной в памяти приемника 5 спутниковой навигационной системы, либо в результате управляющего воздействия со стороны водителя, либо в результате движения с выключенным приемником 5 спутниковой навигационной системы. Величина данного удаления воспринимается приемником 5 спутниковой навигационной системы, датчиком 6 и блоком управления 8. При этом приемник 2 спутниковой навигационной системы указывает на наличие отклонений по координатам х0, у0 направляющей точки А мобильной машины 1 в плане от требуемых, помимо этого на основании значений текущих координат направляющей точки А мобильной машины 1, полученных с приемника 5, производится определение отклонений курсового угла ϕ0 мобильной машины 1 от требуемого, а датчик 6 среднего угла поворота управляемых колес 4 указывает на отклонение кривизны текущей траектории 2 движения мобильной машины 1 от требуемой 3. В результате определения отклонений вышеперечисленных параметров приемником 5 спутниковой навигационной системы и датчиком 6 подаются на блок управления 8 сигналы, которые в процессе обработки преобразуются в корректирующий электрический сигнал. Величина и направление данного сигнала зависят от величины и направления отклонений таких параметров текущего положения мобильной машины, как координаты х0, у0 направляющей точки А мобильной машины 1 в плане, текущая кривизна траектории 2 движения мобильной машины 1, от требуемых значений, воспринимаемых соответственно приемником 5 спутниковой навигационной системы и датчиком 6 среднего угла поворота управляемых колес 4. Далее корректирующим электрическим сигналом приводится во вращение вал электродвигателя 9, который в свою очередь посредством механической передачи 10 корректирует величину и направление вращения рулевого вала 11. Через систему рулевого управления поворот рулевого вала 11 преобразуется в поворот управляемых колес 4. Поворот управляемых колес 4 мобильной машины 1 определяет текущую кривизну траектории 2 движения мобильной машины 1, в результате движения по которой мобильная машина 1 приходит в точку А1 требуемой траектории 3 с координатами х1, у1, курсовым углом ϕ1, средним углом поворота управляемых колес α1, являющимися общими для текущей 2 и требуемой 3 траекторий движения мобильной машины 1 в точке входа A1 мобильной машины 1 на требуемую траекторию 3.
Таким образом, применение данного изобретения позволяет определять отклонение параметров текущего положения мобильной машины от требуемых и автоматически корректировать их на основании величин данных отклонений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2192033C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ МОБИЛЬНОЙ МАШИНЫ ПРИ ДВИЖЕНИИ | 2004 |
|
RU2288451C2 |
| Способ комплексирования разнородной навигационной информации для позиционирования наземного транспортного средства | 2021 |
|
RU2769440C1 |
| Система автоматического управления траекторным движением транспортного средства с функцией курсовой устойчивости | 2019 |
|
RU2724008C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА И СПОСОБ НАВИГАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2684994C1 |
Изобретения относятся к области приборостроения и могут быть использованы при разработке систем автоматического управления. Технический результат - повышение точности. Для достижения данного результата использована спутниковая навигационная система с приемником. При этом определение отклонений текущего положения мобильной машины в заданной координатной точке функционально связывают с основными параметрами траектории движения автомобиля. Вывод мобильной машины при достижении предельно допустимых отклонений на требуемую траекторию производят путем изменения угла поворота управляемых колес в зависимости от имеющихся отклонений при отсутствии отклонений в момент входа на требуемую траекторию. 2 н.п. ф-лы, 1 ил.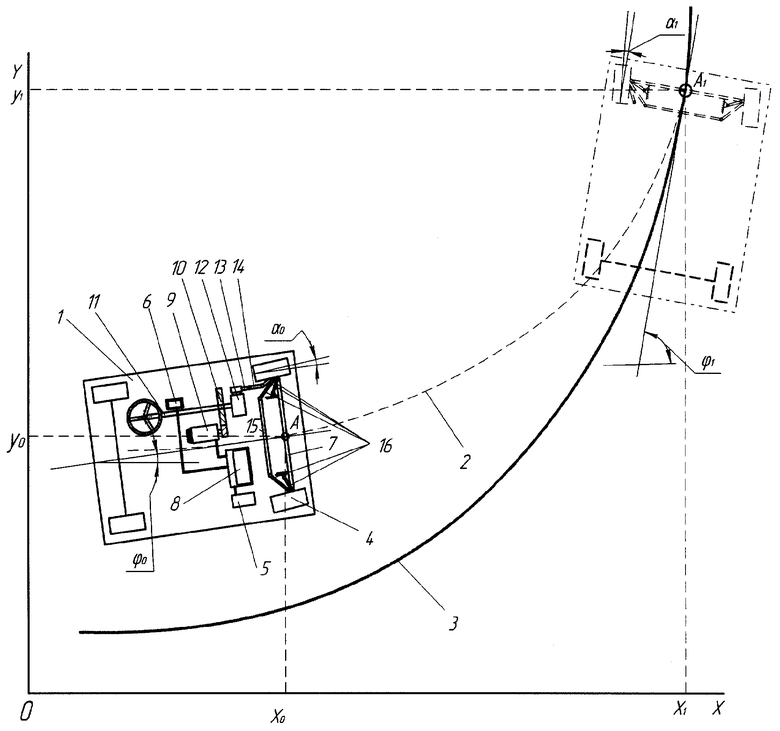
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2192033C1 |
| Устройство для управления транспортным средством | 1982 |
|
SU1037216A1 |
| ОСТРОВЦЕВ А.Н | |||
| Основы проектирования автомобилей | |||
| - М.: Машиностроение, 1968, с.123 | |||
| ЛИТВИНОВ А.С | |||
| Управляемость и устойчивость автомобиля | |||
| - М.: Машиностроение, 1971, с.135-136 | |||
| US 3630079 А, 28.12.1971 | |||
| DE 3033279 A1, 04.08.1982. | |||

