Изобретение относится к области исследований динамики мобильных машин, например автомобилей, данные которых могут быть использованы при разработке систем управления.
Известен способ определения положения мобильной машины при движении, включающий использование гироскопического полукомпаса, установленного на мобильной машине, измерение угловых отклонений продольной оси мобильной машины от заданного прямолинейного движения и углов поворота рулевого колеса (см. книгу Цимбалина В.Б., Кравца В.Н., Кудрявцева С.М. и др. Испытания автомобилей. - М.: Машиностроение, 1978, с.83).
К числу недостатков описанного способа относятся ограниченные возможности исследования динамики движения мобильной машины посредством определения курсового угла, так как не обеспечивается определение поперечных смещений машины, при которых курсовой угол не меняется; низкая точность определения угловых отклонений мобильной машины вследствие влияния суточного вращения Земли на показания гироскопического полукомпаса.
Известен также способ приема-передачи радио- и телевизионной информации, включающий применение антенн, установленных на концах жестких штанг, используемых в том числе и на автомобилях, и позволяющих принимать и передавать информацию с низкоорбитальных спутников (см. патент RU №2126588, МПК Н 04 В 1/06).
Недостатком данного способа является отсутствие информации о приеме данных местоположения автомобиля и его угловых отклонений.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ определения положения мобильной машины при движении, включающий использование спутниковой навигационной системы с приемниками, антенны которых жестко связаны с кузовом мобильной машины, определение траектории движения антенн приемников, размещенных в точках мобильной машины, по показаниям приемников, положения мобильной машины и ее продольной оси в пространстве для каждого момента проведения измерения координат точек мобильной машины (см. патент US №6671587, МПК G 01 С 21/00).
Основными недостатками способа определения положения мобильной машины при движении являются недостаточно высокая точность ее угловых отклонений вследствие размещения антенн приемников непосредственно на кузове мобильной машины.
Задачей предлагаемого изобретения является повышение точности определения угловых отклонений движущейся мобильной машины и за счет этого обеспечение более полной возможности исследования динамики движения.
Поставленная задача достигается тем, что в способе определения положения мобильной машины при движении, включающем использование спутниковой навигационной системы с приемником, антенна которого жестко связана с кузовом мобильной машины, определение траектории движения и положения мобильной машины в пространстве для каждого момента проведения измерения координат, производят путем определения координат положения не менее трех антенн приемников спутниковой навигационной системы, зафиксированных в точках мобильной машины, не лежащих на одной прямой, устанавливая антенны приемников или приемники с антеннами на концах жестких штанг, жестко закрепленных на мобильной машине, вне ее габаритных размеров, а по положению данных антенн либо приемников с антеннами устанавливают в каждый момент проведения измерения координат положение мобильной машины и ее продольной оси, то есть ее курсовой угол, при движении относительно неподвижной системы отсчета.
Повышение точности определения угловых отклонений движущейся мобильной машины обусловлено выносом на концах жестких штанг, жестко закрепленных на мобильной машине, вне ее габаритных размеров, антенн приемников спутниковой навигационной системы или приемников с антеннами, вследствие чего линейные перемещения, соответствующие угловым отклонениям приемников или их антенн, становятся значительно большими, чем линейные перемещения, соответствующие угловым отклонениям любой из точек мобильной машины, даже при отклонении мобильной машины на небольшой угол. Следовательно, появляется возможность фиксирования незначительных угловых отклонений движущейся мобильной машины за счет интенсивного увеличения линейной амплитуды перемещения приемников или их антенн посредством выноса данных антенн либо антенн совместно с приемниками на концах жестких штанг, жестко закрепленных на мобильной машине, вне ее габаритных размеров.
Предлагаемое изобретение поясняется чертежом, на котором изображена схема реализации способа определения положения мобильной машины при движении с установкой антенн приемников спутниковой навигационной системы на концах жестких штанг, жестко закрепленных на мобильной машине, вне ее габаритных размеров.
Кроме того, на чертеже дополнительно показано следующее:
- OXYZ - неподвижная система отсчета;
- O1X1Y1Z1 - система отсчета, жестко связанная с мобильной машиной.
Схема реализации способа определения положения мобильной машины при движении содержит спутниковую навигационную систему 1 с приемниками 2, антенны которых 3 установлены на концах жестких штанг 4, жестко закрепленных на мобильной машине 5 и выходящих за ее габаритные размеры (пример связи приемников с антеннами со штангами на чертеже не показан). Приемники 2 подключены проводной связью к бортовому компьютеру 6 обработки поступившей информации, установленному в мобильной машине 5.
В качестве мобильной машины может быть использован автомобиль.
Способ определения положения мобильной машины при движении осуществляется следующим образом.
Для получения сигнала при движении мобильной машины используют спутниковую навигационную систему 1 с приемниками 2, антенны которых 3 жестко связаны с кузовом мобильной машины 5. Таким образом, в каждый момент проведения измерения координат точек мобильной машины 5 при ее движении не менее трех антенн 3 приемников 2, установленных на концах жестких штанг 4, жестко закрепленных на мобильной машине 5, выходящих за ее пределы и соединенных с приемниками 2 проводной связью, получают сигнал от спутниковой навигационной системы 1. Определение траектории движения антенн 3 приемников 2 производят путем определения координат положения соответствующих антенн 3. Данные изменения положения антенн 3 приемников 2 мобильной машины 5 для каждого момента проведения измерения подают на бортовой компьютер 6 для обработки и определения положения мобильной машины 5 и системы отсчета O1X1Y1Z1, жестко связанной с ней, направления продольной оси данной мобильной машины 5 относительно неподвижной системы отсчета OXYZ. При этом появляется возможность фиксирования незначительных линейных перемещений, соответствующих угловым отклонениям движущейся мобильной машины 5 за счет искусственного увеличения линейной амплитуды перемещения приемников 2 или их антенн 3 посредством штанг 4. Это объясняется значительно большими линейными перемещениями, соответствующими угловым отклонениям приемников 2 или их антенн 3, чем линейные перемещения, соответствующие угловым отклонениям любой из точек мобильной машины 5, даже при отклонении мобильной машины 5 на небольшой угол.
Таким образом, использование предлагаемого изобретения по сравнению с прототипом обеспечивает повышение точности определения угловых отклонений мобильной машины путем назначения и определения положения в пространстве не менее чем трех точек, не лежащих на одной прямой, зафиксированных на концах жестких штанг, жестко закрепленных на мобильной машине, и выходящих за ее габаритные размеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения мобильной машины на плоскости | 2015 |
|
RU2608792C2 |
| СПОСОБ КУРСОВОГО УПРАВЛЕНИЯ МОБИЛЬНОЙ МАШИНОЙ ПРИ ДВИЖЕНИИ ПО ТРАЕКТОРИИ ПРОИЗВОЛЬНОЙ ФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298216C2 |
| Система бесключевого доступа к транспортному средству с дополнительной защитой от угона (PKES-плюс, варианты) | 2021 |
|
RU2763613C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2192033C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ЛЕДНИКА | 2007 |
|
RU2362971C2 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
Изобретение относится к области исследований динамики мобильных машин, например автомобилей, данные которых могут быть использованы при разработке систем управления. Задачей предлагаемого изобретения является повышение точности определения угловых отклонений движущейся мобильной машины и обеспечение более полной возможности исследования динамики движения. Способ определения положения мобильной машины при движении заключается в использовании спутниковой навигационной системы с приемником, антенна которого жестко связана с кузовом мобильной машины, определении траектории движения и положения мобильной машины в пространстве для каждого момента проведения измерения координат путем определения координат положения не менее трех антенн приемников или приемников с антеннами спутниковой навигационной системы, установленных на концах жестких штанг в точках мобильной машины, не лежащих на одной прямой, а по положению данных антенн устанавливают в каждый момент проведения измерения координаты положения мобильной машины и ее продольной оси при движении относительно неподвижной системы отсчета. При этом жесткие штанги жестко закрепляют на мобильной машине вне ее габаритных размеров. 1 ил.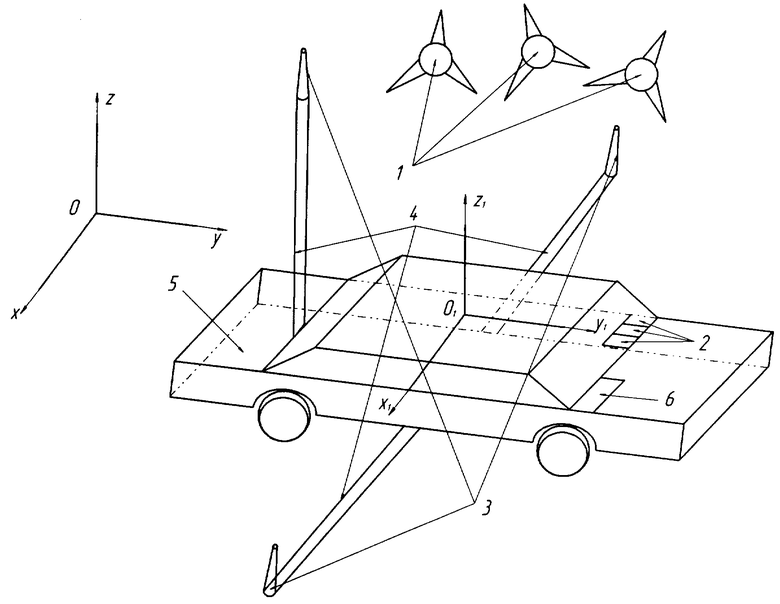
Способ определения положения мобильной машины при движении, включающий использование спутниковой навигационной системы с приемником, антенна которого жестко связана с кузовом мобильной машины, определение траектории движения и положения мобильной машины в пространстве для каждого момента проведения измерения координат путем определения координат положения не менее трех антенн приемников или приемников с антеннами спутниковой навигационной системы, установленных на концах жестких штанг в точках мобильной машины, не лежащих на одной прямой, а по положению данных антенн устанавливают в каждый момент проведения измерения координаты положения мобильной машины и ее продольной оси при движении относительно неподвижной системы отсчета, отличающийся тем, что жесткие штанги жестко закрепляют на мобильной машине вне ее габаритных размеров.
| US 6671587 В2, 30.12.2003 | |||
| Комплексное аварийно-сигнальное и наблюдательное устройство для автомобиля | 1990 |
|
SU1751004A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1992 |
|
RU2042144C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| ИЗМЕРИТЕЛЬ КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241208C1 |
| Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса и устройство для его осуществления | 1985 |
|
SU1325168A1 |
| СПОСОБ РЕПОЗИЦИИ ДИСЛОЦИРОВАННОЙ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2004 |
|
RU2271180C1 |

