Изобретение относится к области измерительной техники, а именно к измерительным преобразователям линейных ускорений.
Известен акселерометр [1], содержащий корпус, пластину с внешней подвижной частью, внутренней неподвижной частью и соединяющими их упругими перемычками по оси подвеса, дифференциальный емкостный преобразователь положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и установленной на подвижной части пластины посредством грузов компенсационной катушкой, груз на подвижной части пластины, усилитель.
Наиболее близким по технической сущности является акселерометр [2], содержащий корпус с предназначенным для установки по вектору ускорения свободного падения фланцем, первую пластину с внешней подвижной частью, внутренней неподвижной частью и соединяющими их упругими перемычками по оси подвеса, дифференциальный емкостный преобразователь положения с подвижным электродом в виде электропроводной поверхности первой пластины и двумя неподвижными электродами на второй пластине, расположенной на одной стороне неподвижной части первой пластины, третью пластину на другой стороне неподвижной части первой пластины, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе со стороны второй пластины и установленной на подвижной части первой пластины посредством грузов компенсационной катушкой со стороны второй пластины, груз на подвижной части первой пластины со стороны третьей пластины, усилитель, причем по крайней мере одна из сторон второй пластины выполнена прямолинейной и параллельной оси подвеса, плоскость фланца параллельна поверхности внешней подвижной части первой пластины.
Недостатком такого акселерометра является погрешность измерения ускорения вследствие нестабильности сигнала акселерометра, не зависящего от ускорения, при дрейфе нулевого сигнала дифференциального емкостного преобразователя.
Технический результат изобретения заключается в повышении точности измерения ускорения.
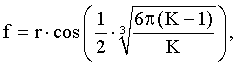
Данный технический результат достигается в акселерометре, содержащем корпус с предназначенным для установки по вектору ускорения свободного падения фланцем, первую пластину с внешней подвижной частью, внутренней неподвижной частью и соединяющими их упругими перемычками по оси подвеса, дифференциальный емкостный преобразователь положения с подвижным электродом в виде электропроводной поверхности первой пластины и двумя неподвижными электродами на второй пластине, расположенной на одной стороне неподвижной части первой пластины, третью пластину на другой стороне неподвижной части первой пластины, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе со стороны второй пластины и установленной на подвижной части первой пластины посредством грузов компенсационной катушкой со стороны второй пластины, груз на подвижной части первой пластины со стороны третьей пластины, усилитель, причем по крайней мере одна из сторон второй пластины выполнена прямолинейной и параллельной оси подвеса, плоскость фланца параллельна поверхности внешней подвижной части первой пластины, отличающемся тем, что груз на подвижной части первой пластины со стороны третьей пластины расположен выше оси подвеса относительно вектора ускорения свободного падения, прямолинейной выполнена сторона части второй пластины выше оси подвеса, расстояние f прямолинейной стороны второй пластины от оси подвеса выполнено в соответствии с соотношением
где
r - радиус второй пластины;
К - коэффициент

M1 - момент сил инерции, действующих на часть подвижной части первой пластины, расположенной выше оси подвеса;
М2 - момент сил инерции, действующих на часть подвижной части первой пластины, расположенной ниже оси подвеса
Посредством расположения груза, обращенного в сторону третьей пластины, выше оси подвеса обеспечивается повышение точности измерения ускорения вследствие уменьшения изменения не зависящего от ускорения сигнала акселерометра при дрейфе нулевого сигнала дифференциального емкостного преобразователя положения, так как при расположении груза выше оси подвеса уменьшается относительная жесткость системы упругого подвеса подвижной части относительно неподвижной части, что приводит к уменьшению изменения упругих сил реакции подвеса при угловом перемещении подвижной части вследствие дрейфа нулевого сигнала дифференциального емкостного преобразователя положения.
Путем расположения груза на подвижной части первой пластины выше оси подвеса, выполнения прямолинейной стороны части второй пластины выше оси подвеса, выполнения в соответствии с расчетным соотношением расстояния прямолинейной стороны второй пластины от оси подвеса минимизируется изменение углового положения подвижной части первой пластины относительно неподвижных электродов на второй пластине при вибрационных воздействиях вследствие выравнивания угловых колебаний частей подвижной части первой пластины, расположенных выше и ниже оси подвеса. В результате повышается точность измерения ускорения вследствие уменьшения вибрационной погрешности, вызванной изменением нелинейности акселерометра за счет углового перемещения подвижной части первой пластины.
На фиг.1 представлен общий вид акселерометра, на фиг.2 - вид первой пластины, на фиг.3 - вид второй пластины, на фиг.4 - электрическая схема акселерометра.
В акселерометре (фиг.1) в корпусе 1 на стойке 2 установлена первая пластина 3, например, из монокристаллического кремния, имеющая внешнюю подвижную часть 4 и внутреннюю неподвижную часть 5. На стороне 6 неподвижной части 5, отстоящей на расстоянии d от подвижной части 4, расположена вторая пластина 7 с неподвижными электродами 8', 8'' дифференциального емкостного преобразователя положения, подвижным электродом которого является электропроводная поверхность подвижной части 4, образованная легированием монокристаллического кремния бором.
С той же стороны 6 первой пластины 3 установлен дисковый постоянный магнит 9 магнитоэлектрического силового преобразователя, кольцевая компенсационная катушка 10 которого посредством грузов 11', 11'' установлена на подвижной части 4 первой пластины 3.
На стороне 12 неподвижной части 5 первой пластины 3 расположена третья пластина 13. Расстояниями d образованы зазоры между первой пластиной 3 и второй 7 и третьей 13 пластинами.
Со стороны 12 первой пластины 3 установлен груз 14.
Первая пластина 3, вторая пластина 7, третья пластина 13, постоянный магнит 9 с диаметральным направлением намагниченности закреплены на стойке 2 корпуса 1 гайкой 15.
Корпус 1 закрыт крышкой 16, загерметизирован и заполнен газовой средой, например сухим азотом.
На корпусе 1 выполнен фланец 17, плоскость 18 которого предназначена для установки акселерометра по вектору ускорения свободного падения. Плоскость 18 фланца 17 параллельна плоскости 19 подвижной части 4 первой пластины 3.
В первой пластине 3 (фиг.2) подвижная часть 4 и неподвижная часть 5 соединены упругими перемычками 20', 20'' так, что проходящая по середине каждой из них прямая 21-21 представляет собой ось подвеса подвижной части 4 относительно неподвижной части 5. Груз 14 расположен выше оси подвеса 21-21 в положении, когда плоскость 18 фланца 17 параллельна вектору ускорения свободного падения.
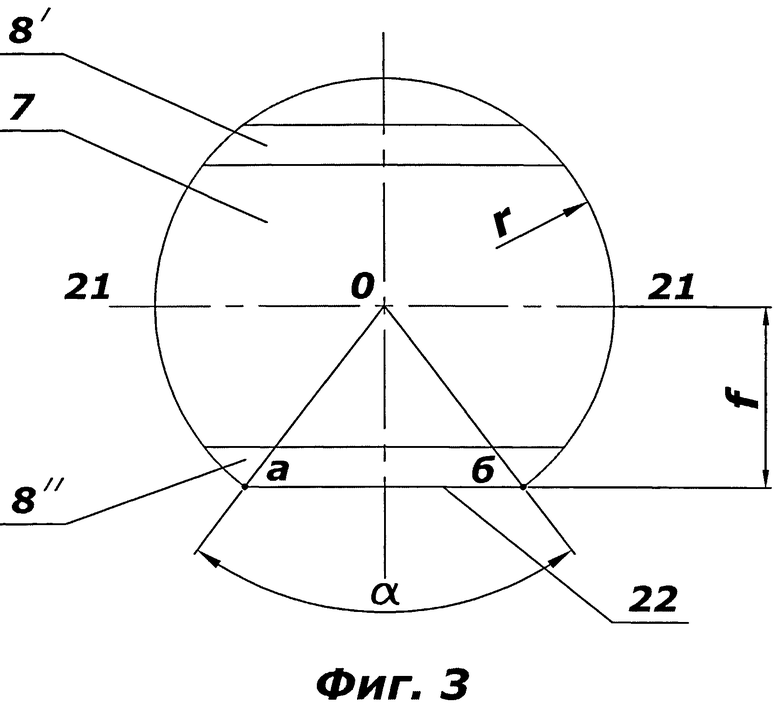
Во второй пластине 7 (фиг.3) расположенная выше оси подвеса 21-21 часть второй пластины 7 имеет прямолинейную сторону 22, параллельную оси подвеса 21-21 и находящуюся на расстоянии f от оси подвеса 21-21 в соответствии с выражением

где
r - радиус второй пластины 7;
К - коэффициент
где
M1 - момент сил инерции, действующих на часть подвижной части 4 первой пластины 3, расположенной выше оси подвеса 21-21;
М2 - момент сил инерции, действующих на часть подвижной части 4 первой пластины 3, расположенной ниже оси подвеса 21-21.
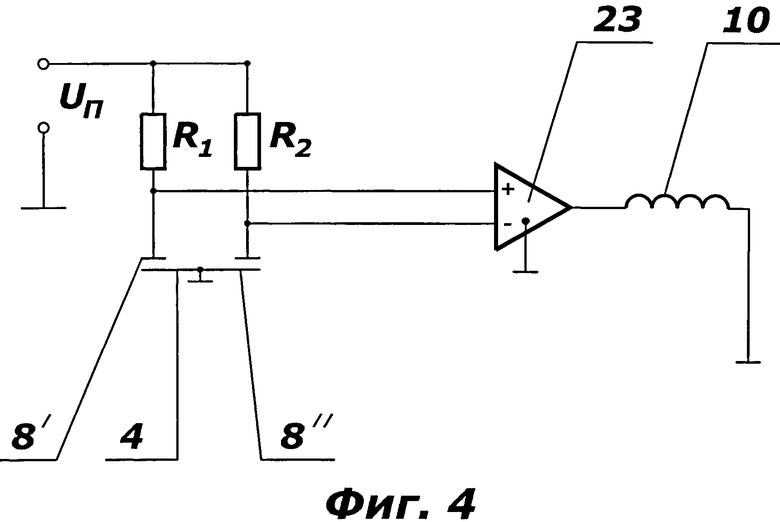
В акселерометре (фиг.4) неподвижный электрод 8' соединен с первым выводом резистора R1, неподвижный электрод 8'' соединен с первым выводом резистора R2. Вторые выводы резисторов R1 и R2 соединены вместе и подключены к выходу источника переменного тока с напряжением Un, второй выход которого подключен к общему проводу. К общему проводу также подключен подвижный электрод дифференциального емкостного преобразователя положения в виде электропроводной поверхности подвижной части 4 первой пластины 3. Точки соединения резисторов R1, R2 с неподвижными электродами 8', 8'' подключены к входу усилителя 23, состоящего из дифференциального усилителя, суммирующего усилителя, демодулятора и усилителя постоянного тока, к выходу которого подключена компенсационная катушка 10 магнитоэлектрического силового преобразователя.
Акселерометр работает следующим образом. При наличии линейного ускорения под действием инерционной силы происходит изменение углового положения подвижной части 4, в результате чего изменяются емкости, образованные неподвижными электродами 8', 8'' и подвижным электродом дифференциального емкостного преобразователя положения. На вход усилителя 23 поступает сигнал, который после преобразования и усиления подается на компенсационную катушку 10. В магнитоэлектрическом силовом преобразователе создается компенсационная сила, уравновешивающая инерционную силу, а ток в компенсационной катушке 10 является мерой линейного ускорения.
При вибрационных воздействиях угловые колебания части подвижной части 4 выше оси подвеса 21-21 пропорциональны моменту сил инерции M1 относительно оси подвеса 21-21, действующих на часть подвижной части 4 выше оси подвеса 21-21. Угловые колебания части подвижной части 4 ниже оси подвеса 21-21 пропорциональны моменту сил инерции М2 относительно оси подвеса 21-21, действующих на часть подвижной части 4 ниже оси подвеса 21-21. Так как на подвижной части 4 выше оси подвеса 21-21 расположен груз 14, то M1>М2. Следовательно, угловые колебания части подвижной части 4 выше оси подвеса 21-21 будут больше угловых колебаний части подвижной части 4 ниже оси подвеса 21-21. Выравнивание угловых колебаний частей подвижной части 4 выше и ниже оси подвеса 21-21 осуществляется за счет создания разности сил давлений газовой пленки, действующих на подвижную часть 4 выше и ниже оси подвеса 21-21. Так как давление пропорционально площади, то площадь S1 части второй пластины 7 выше оси подвеса 21-21 выполнена меньшей площади S2 части второй пластины 7 ниже оси подвеса 21-21 исходя из условия
Площадь S1 части второй пластины 7 выше оси подвеса 21-21

где
r - радиус второй пластины 7,
α - центральный угол дуги между точками "а" и "б" пересечения отрезком прямой линии 22 внешней поверхности второй пластины 7 по ее окружности (фиг.3).
Площадь S2 части второй пластины 7 ниже оси подвеса 21-21:
Представим, что
тогда
отсюда
обозначим

где
K - коэффициент.
Выражение (3) преобразуется к виду
отсюда
Расстояние f от оси подвеса 21-21 прямолинейной стороны 22 второй пластины 7:
При подстановке (11) в (12) получаем
При выполнении в соответствии с выражением (13) расстояния f прямолинейной стороны 22 второй пластины 7 от оси подвеса 21-21 происходит выравнивание угловых перемещений частей подвижной части 4 первой пластины 3 при вибрационном воздействии. Поэтому подвижная часть 4 сохраняет свое угловое положение относительно неподвижных электродов 8' и 8'', что исключает угловое перемещение компенсационной катушки 10 относительно постоянного магнита 9. Сохранение положения компенсационной катушки 10 относительно постоянного магнита 9 обеспечивает неизменность нелинейности градуировочной характеристики акселерометра, обусловленной соленоидным эффектом. В результате при вибрационном воздействии минимизируется вибрационная погрешность, что повышает точность акселерометра.
Источники информации
1. Патент РФ №2051542, кл. G01P 15/13. Компенсационный акселерометр. 1994 г.
2. Патент РФ №2193209, кл. G01P 15/13. Компенсационный акселерометр. 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2545469C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2514151C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2165624C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2461838C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
Изобретение относится к области измерительной техники, а именно к измерительным преобразователям линейных ускорений. Акселерометр содержит корпус, первую пластину с внешней подвижной частью, внутренней неподвижной частью и соединяющими их упругими перемычками по оси подвеса, дифференциальный емкостный преобразователь положения, вторую пластину с электродами, третью пластину, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, груз на подвижной части первой пластины, усилитель. В соответствии с изобретением груз на подвижной части первой пластины расположен выше оси подвеса, сторона части второй пластины выше оси подвеса выполнена прямолинейной, расстояние прямолинейной стороны второй пластины от оси подвеса выполнено в соответствии с расчетным соотношением. Технический результат - повышение точности измерения ускорения. 4 ил.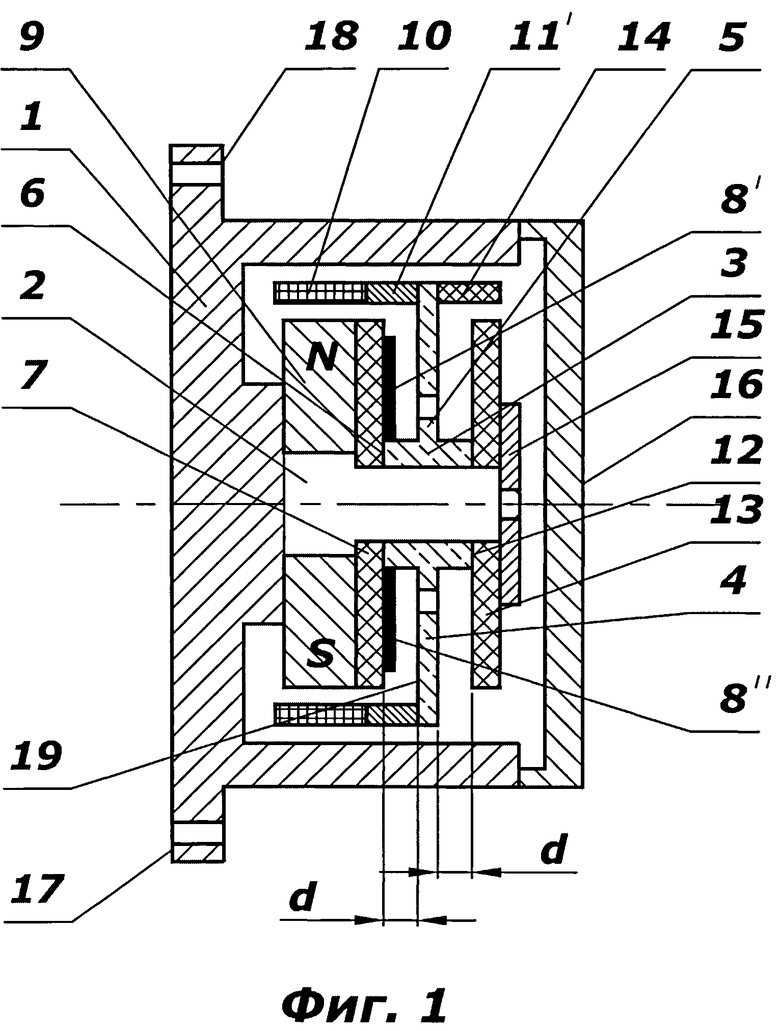
Акселерометр, содержащий корпус с предназначенным для установки по вектору ускорения свободного падения фланцем, первую пластину с внешней подвижной частью, внутренней неподвижной частью и соединяющими их упругими перемычками по оси подвеса, дифференциальный емкостный преобразователь положения с подвижным электродом в виде электропроводной поверхности первой пластины и двумя неподвижными электродами на второй пластине, расположенной на одной стороне неподвижной части первой пластины, третью пластину на другой стороне неподвижной части первой пластины, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе со стороны второй пластины и установленной на подвижной части первой пластины посредством грузов компенсационной катушкой со стороны второй пластины, груз на подвижной части первой пластины со стороны третьей пластины, усилитель, причем по крайней мере одна из сторон второй пластины выполнена прямолинейной и параллельной оси подвеса, плоскость фланца параллельна поверхности внешней подвижной части первой пластины, отличающийся тем, что груз на подвижной части первой пластины со стороны третьей пластины расположен выше оси подвеса относительно вектора ускорения свободного падения, прямолинейной выполнена сторона части второй пластины выше оси подвеса, расстояние f прямолинейной стороны второй пластины от оси подвеса выполнено в соответствии с соотношением:
где
r - радиус второй пластины;
К - коэффициент

где
M1 - момент сил инерции, действующих на часть подвижной части первой пластины, расположенной выше оси подвеса;
М2 - момент сил инерции, действующих на часть подвижной части первой пластины, расположенной ниже оси подвеса.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| US 6422076 B1, 23.07.2002 | |||

