Изобретение относится к электротехнике и может быть использовано при управлении синхронными или асинхронными электродвигателями или в процессе лабораторного определения их параметров.
Известен "классический" способ определения индуктивного сопротивления нагрузки на основе предварительных измерений напряжения, тока нагрузки и угла сдвига между ними с последующим вычислением реактивной мощности и соответствующего реактивного сопротивления [Г.И. Атабеков. Основы теории цепей. Учебник для вузов. М., "Энергия", 1969, с. 36-46]. Недостатком данного способа является наличие большого количества датчиков, сложность вычисления мощностей при несинусоидальных токах и напряжениях, низкое быстродействие.
Известен способ определения синхронного реактивного сопротивления синхронного двигателя из полученных опытным путем характеристик холостого хода и короткого замыкания [К.П. Ковач, И. Рац. Переходные процессы в машинах переменного тока. Госэнергоиздат, М.-Л., 1963, с. 110, 111]. Недостатком данного способа является невозможность его оперативного применения в электроприводе.
Наиболее близким к предложенному способу является способ определения индуктивного сопротивления электродвигателей переменного тока, питающихся от сети постоянного тока через коммутирующие ключи, в соответствии с которым с помощью коммутирующего ключа на заторможенный электродвигатель подают скачкообразное ступенчатое напряжение, анализируют кривую переходного процесса тока, строят графики частотных характеристик и по ним определяют эквивалентное индуктивное сопротивление [Е.В. Кононенко, Г.А. Сипайлов, К.А. Хорьков. Электрические машины (спец. курс). Учебное пособие для вузов. М., "Высшая школа", 1975, с. 141-147].
Недостатком данного способа являются его ограниченные функциональные возможности из-за длительной реализации, и как следствие невозможность его оперативного применения в электроприводе.
Основной задачей, на решение которой направлено предлагаемое изобретение, является расширение функциональных возможностей путем существенного снижения времени реализации за счет использования информативных свойств инвертора напряжения, и таким образом создание возможностей непосредственного использования в работающем электроприводе переменного тока.
Поставленная задача находит свое решение в том, что в способе определения индуктивного сопротивления электродвигателей переменного тока на электродвигатель подают скачкообразное ступенчатое напряжение.
Новым является то, что скачкообразное ступенчатое напряжение формируют с помощью инвертора с прямоугольно-ступенчатой формой выходного напряжения, дополнительно определяют первую производную фазного тока электродвигателя в конечной и начальной точках сопрягаемых коммутационных интервалов инвертора, а индуктивное сопротивление определяют в соответствии с выражениями:
- для точки сопряжения интервалов
(π/3-2π/3) и (2π/3-π); (1)
- для точки сопряжения интервалов
(0-π/3) и (π/3-2π/3) (2)
- для точки сопряжения интервалов
где Хэкв - эквивалентное индуктивное сопротивление электродвигателя;
Ud - постоянное напряжение питания инвертора;
mн1 = tgβн1, mк1 = tgβк1 - значения первых производных фазного тока электродвигателя, измеренные соответственно в начальной и конечной точках коммутационного интервала инвертора (0-π/3);βн1,βк1 - углы наклона касательных в начальной и конечной точках коммутационного интервала инвертора (0-π/3);
mн2 = tgβн2, mк2 = tgβк2 - то же для интервала (π/3-2π/3);
mн3 = tgβн3, mк3 = tgβк3 - то же для интервала (2π/3-π).
За счет указанной совокупности отличительных признаков предлагаемый способ позволяет расширить функциональные возможности за счет существенного снижения времени реализации благодаря информативным свойствам инвертора, и на этой основе создать возможность непосредственного использования способа в работающем электроприводе переменного тока.
На фиг. 1 приведена функциональная схема устройства, реализующего предлагаемый способ определения индуктивного сопротивления электродвигателей переменного тока.
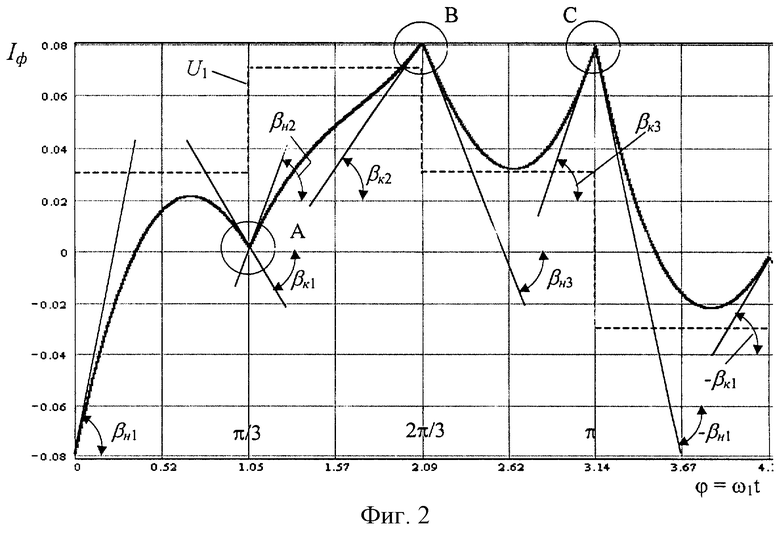
Фиг.2 иллюстрирует определение первых производных в начальных и конечных точках коммутационных интервалов инвертора.
Устройство (фиг. 1) содержит электродвигатель 1 переменного тока, соединенный цепями статора через датчик 2 фазных токов с выходом инвертора 3 напряжения, силовой вход которого соединен с источником 4 постоянного тока. Инвертор 3 напряжения своим управляющим многофазным входом подключен к первому многофазному выходу схемы 5 управления, второй выход которой соединен с первым входом коммутатора 6. Выход коммутатора 6 соединен со входом дифференциатора 7, выход которого подключен к первому входу вычислителя 8. Второй вход вычислителя 8 соединен с выходом источника постоянного тока 4.
В качестве датчика 2 могут быть использованы стандартные датчики, основанные на эффекте Холла. Инвертор 3 выполняется по мостовой схеме с мостом обратных диодов. Коммутатор 6 представляет собой набор логически коммутируемых ключей. Дифференциатор 7 выполняется на аналоговых операционных усилителях с резистивно-емкостными цепями, либо в цифровом виде. Совокупности устройств 5-8, производящих функции формирования сигналов управления инвертором и вычисления, может быть реализована на программируемом микроконтроллере.
Способ определения индуктивного сопротивления электродвигателей переменного тока заключается в следующем.
При питании электродвигателя переменного тока от трехфазного инвертора с прямоугольно-ступенчатой формой выходного напряжения фазный ток на коммутационных интервалах 0-π/3; π/3-2π/3; 2π/3-π можно представить соответственно токами I1(ϕ), I2(ϕ), I3(ϕ) [А. Г.Гарганеев. Синхронно-гистерезисный двигатель как нагрузка автономного инвертора напряжения//Аппаратно-программные средства автоматизации технологических процессов. Сб. трудов НИИ АЭМ /Под ред. Шурыгина Ю.А., Томск: Изд-во Том. ун-та. 2000. С. 166-178].
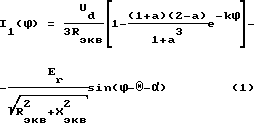
где Rэкв, Хэкв - соответственно эквивалентные активное и реактивное сопротивления фазы двигателя;
k=Rэкв/Хэкв; α = arctg(Xэкв/Rзкв); Er - фактическая ЭДС ротора; - круговая частота;
- круговая частота;
ϕ - текущее значение фазы;
Ud - постоянное напряжение на входе инвертора;
Θ - фаза ЭДС ротора.
Фазный ток в точках сопряжения коммутационных интервалов инвертора не имеет производной, однако имеет левосторонние и правосторонние пределы и при описании выражениями (1) - (3) может быть продифференцирован в конечных и начальных точках соответствующих интервалов. При этом каждое выражение первой производной функции согласно математическому определению есть тангенс угла наклона касательной к дифференцируемой функции относительно оси аргумента:
где βi(ϕ) - угол наклона касательной к кривой фазного тока электродвигателя.
На примере сопряжения интервалов π/3-2π/3 и 2π/3-π (фиг. 2, зона В) исходя из равенства ЭДС ротора (или напряжения инвертора), из выражений (5), (6) для точки ϕ = 2π/3 имеем:
где βк2,βн3 - соответственно углы наклона касательных к точке ϕ = 2π/3 в конце интервала π/3-2π/3 и в начале интервала 2π/3-π согласно обозначениям, принятым на фиг.2.
После преобразований (7) получаем выражение (8) для определения индуктивного сопротивления по напряжению питания инвертора и двум значениям производной фазного тока в зоне В (фиг.2):
Аналогично получаются выражения для определения Хэкв в точках сопряжения зон А и С (фиг.2):
и
При необходимости фазное напряжение в выражениях (7) - (10) можно заменить на амплитуду фазного напряжения электродвигателя, т.е. Ud=3/2U1.
Обращает на себя внимание тот факт, что в выражениях (8) - (10) отсутствуют активные сопротивления. Это объясняется тем, что во-первых, в вопросе преобразования электромагнитной энергии главную роль играет индуктивное сопротивление как атрибут накопления и преобразования, а во-вторых, при скачкообразном ступенчатом изменении напряжения питания наклон тока непосредственно после скачка относительно существовавшего наклона определяется только индуктивным сопротивлением.
Устройство, представленном на фиг. 1, работает следующим образом.
При подаче напряжения питания схема 5 управления формирует трехфазную систему напряжений с относительным сдвигом фаз в 120o(эл.), необходимых для работы инвертора 3, в результате которой на его выходе формируется трехфазное прямоугольно-ступенчатое напряжение для питания электродвигателя 1 (фиг.2, пунктир). Дифференциатор 7 на одном из коммутационных интервалов вычисляет текущее значение первой производной фазного тока инвертора по углу ϕ = ω1t,, информация о котором поступает с выхода датчика 2 через коммутатор 6. Выражения (8) - (10) решаются в вычислителе 8, в который также вводится напряжение питания инвертора 3.
Таким образом, согласно предложенному способу, значение индуктивного сопротивления определяется непосредственно на работающем электродвигателе и может быть использовано для формирования законов управления электроприводом, в частности при вычислении и формировании момента. Оперативное определение Хэкв особенно необходимо в электроприводах с синхронно-гистерезисными электродвигателями при изменении магнитного состояния материала ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2007010C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU2069033C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ M-ФАЗНЫМ ИНВЕРТОРОМ | 1990 |
|
RU2013851C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 1991 |
|
RU2015611C1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ | 1993 |
|
RU2037936C1 |
| ГЕНЕРАТОР ТРАПЕЦЕИДАЛЬНОГО ТОКА | 1990 |
|
RU2034361C1 |
| СПОСОБ ДИАГНОСТИКИ КОМБИНАЦИОННЫХ ЛОГИЧЕСКИХ СХЕМ | 1991 |
|
RU2017207C1 |
Изобретение относится к электротехнике и может быть использовано при управлении синхронными или асинхронными электродвигателями или в процессе лабораторного определения их параметров. Технический результат изобретения, позволяющий снизить время определения индуктивного сопротивления, достигается путем того, что в способе определения индуктивного сопротивления электродвигателя переменного тока, в соответствии с которым на электродвигатель подают скачкообразное ступенчатое напряжение, которое формируют с помощью инвертора с прямоугольно-ступенчатой формой выходного напряжения, дополнительно определяют первую производную фазного тока электродвигателя в конечной и начальной точках сопрягаемых коммутационных интервалов инвертора, а индуктивное сопротивление определяют при работающем электродвигателе по напряжению питания инвертора и по дополнительно определенным первым производным фазного тока электродвигателя. 2 ил.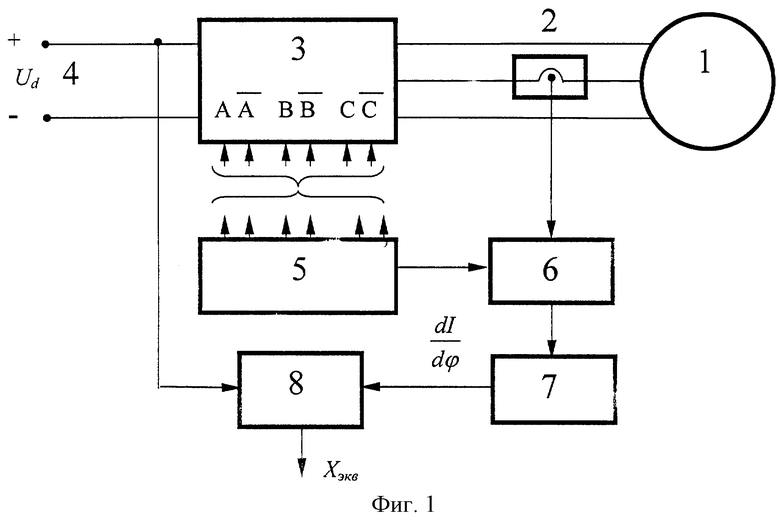
Способ определения индуктивного сопротивления электродвигателей переменного тока, в соответствии с которым на электродвигатель подают скачкообразное ступенчатое напряжение, отличающийся тем, что скачкообразное ступенчатое напряжение формируют с помощью инвертора с прямоугольно-ступенчатой формой выходного напряжения, дополнительно определяют первую производную фазного тока электродвигателя в конечной и начальной точках сопрягаемых коммутационных интервалов инвертора, а индуктивное сопротивление определяют в соответствии с выражениями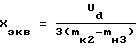
- для точки сопряжения интервалов
(π/3-2π/3) и (2π/3-π); (1)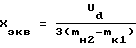
- для точки сопряжения интервалов
(0-π/3) и (π/3-2π/3) (2)
- для точки сопряжения интервалов
где Хэкв - эквивалентное индуктивное сопротивление электродвигателя;
ud - постоянное напряжение питания инвертора;
mн1 = tgβн1, mк1 = tgβк1 - значения первых производных фазного тока электродвигателя, измеренные соответственно в начальной и конечной точках коммутационного интервала инвертора (0-π/3);βн1,βк1 - углы наклона касательных в начальной и конечной точках коммутационного интервала инвертора (0-π/3);
mн1 = tgβн1, mк1 = tgβк1 - то же для интервала (π/3-2π/3);
mн3 = tgβн3, mк3 = tgβк3 - то же для интервала (2π/3-π).
| КОНОНЕНКО Е.В., СИПАЙЛОВ Г.А., ХОРЬКОВ К.А | |||
| Электрические машины (спец | |||
| курс) | |||
| Учебное пособие для вузов | |||
| - М.: Высшая школа, 1975, с.141-147 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АКТИВНОЙ И ИНДУКТИВНОЙ СОСТАВЛЯЮЩИХ ПОЛНОГО СОПРОТИВЛЕНИЯ ФАЗЫ ДВУХОБМОТОЧНОГО ТРЕХФАЗНОГО ТРАНСФОРМАТОРА БЕЗ НУЛЕВОГО ПРОВОДА | 1970 |
|
SU420953A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ RLC-ЦЕПЕЙ | 1995 |
|
RU2100814C1 |
| DE 1222161 А, 04.08.1996 | |||
| Передвижное устройство для выгрузки сыпучих грузов, в частности, семян хлопчатника, из железнодорожных вагонов | 1952 |
|
SU95839A1 |

