Изобретения относятся к электротехнике и могут быть использованы для управления электродвигателями переменного тока - синхронными, синхронно-гистерезисными или асинхронными, как общего применения, так и специального, выполненными без доступа к валу, например гироскопическими, или используемыми в многодвигательных электроприводах синхронного вращения.
Известен способ определения тока ротора асинхронного электродвигателя через его потокосцепление, в соответствии с которым измеряют фазные напряжения, токи статора и скорость ротора электродвигателя и величину тока ротора определяют посредством вычисления [А.Д. Поздеев. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: изд-во Чуваш. ун-та, 1998, с.55].
Недостатком данного способа является наличие большого числа датчиков, низкие быстродействие и точность вычисления. Кроме того, способ неприменим при отсутствии доступа к валу электродвигателя.
Известен способ определения ЭДС ротора синхронно-гистерезисного электродвигателя, питающегося от преобразователя напряжения, путем кратковременного прерывания фазного тока электродвигателя при помощи инвертора напряжения и измерения параметров ЭДС - фазы и величины, в моменты прерывания [Б.А. Делекторский, В.Н. Тарасов. Возможности сокращения времени разбега гистерезисного привода гироротора / Труды МЭИ, вып. 339, 1977, с.52-61].
Недостаток данного способа заключается в возникновении дополнительных переходных процессов и динамических моментов в электродвигателе при коммутации. По этой причине измеренная в момент отключения величина ЭДС ротора может не соответствовать величине до измерения. Кроме того, за счет действия воздушного зазора и потоков рассеяния измеряемое значение ЭДС также не соответствует истинному значению, а для получения достоверного результата необходимо измерить несколько полупериодов, что снижает быстродействие способа.
Наиболее близким к предложенному способу является способ стабилизации частоты вращения электродвигателей переменного тока, питающихся от статических преобразователей частоты, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения [А.Г. Гарганеев, А.С. Шеховцов, Ю.А. Шурыгин. Способ стабилизации частоты вращения электродвигателей переменного тока (его варианты) /Положит. реш. по заявке 2000113178/09 от 29.05.2000 на выдачу патента на изобретение].
Согласно первому варианту способа определяют фазу второй производной фазного тока электродвигателя относительно значения π/2 фазного напряжения инвертора, что является фазой ЭДС ротора синхронных электродвигателей и фазой тока ротора асинхронных электродвигателей. Полученный таким образом сигнал используют в качестве сигнала обратной связи для стабилизации скорости вращения указанных типов электродвигателей.
По второму варианту способа определяют фазу второй производной тока потребления инвертора на его коммутационных интервалах относительно значения π/2 соответствующего фазного напряжения, что является фазой ЭДС ротора синхронных электродвигателей и фазой тока ротора асинхронных электродвигателей. Полученный таким способом сигнал, используют в качестве сигнала обратной связи для стабилизации скорости вращения указанных типов электродвигателей.
Недостатком данного способа являются неполные функциональные возможности, затрудняющие возможность построения управляемых высококачественных электроприводов переменного тока.
Основной задачей, на решение которой направлено предлагаемое изобретение, является расширение функциональных возможностей синхронных и асинхронных электродвигателей, находящихся в системе электропривода, и питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения.
Поставленная задача находит свое решение в том, что в первом варианте способа определяют фазу ЭДС ротора синхронных и тока ротора асинхронных электродвигателей, питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения, по фазе второй производной фазного тока электродвигателя на одном из коммутационных интервалов инвертора (π/3÷2π/3)+nπ или (π/3÷2π/3)+nπ относительно значения π/2, где n=0, 1, 2,....
Новым является то, что дополнительно определяют первую производную фазного тока в точке обращения в нуль его второй производной на одном из коммутационных интервалов инвертора (π/3÷2π/3)+nπ или (2π/3÷2π/3)+nπ, при этом величину ЭДС ротора синхронных и тока ротора асинхронных электродвигателей определяют в соответствии с полученным значением первой производной и заданными параметрами конкретного электродвигателя.
Кроме того, первую производную фазного тока определяют в точке обращения в нуль его второй производной на одноименных коммутационных интервалах инвертора в последовательности: фаза А; фаза  фаза В; фаза
фаза В; фаза  фаза С; фаза
фаза С; фаза  и т.д.
и т.д.
Поставленная задача находит свое решение в том, что во втором варианте способа определяют фазу ЭДС ротора синхронных и тока ротора асинхронных электродвигателей, питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения, по фазе второй производной тока потребления инвертора на его коммутационных интервалах относительно значения π/2 соответствующего фазного напряжения.
Новым является то, что дополнительно определяют первую производную тока потребления инвертора в точке обращения в нуль его второй производной на коммутационных интервалах инвертора и величину ЭДС ротора синхронных и тока ротора асинхронных электродвигателей определяют в соответствии с полученным значением первой производной и заданными параметрами конкретного электродвигателя.
Объединение технических решений, относящихся к вариантам способа, связано с тем, что они решают одну и ту же задачу - расширение функциональных возможностей синхронных и асинхронных электродвигателей, находящихся в системе электропривода, и питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения, принципиально одним и тем же путем: определением первой производной фазного тока (выходного) или тока потребления (входного) в точке обращения в нуль их второй производной на коммутационных интервалах инвертора, и определением величины ЭДС ротора синхронных и тока ротора асинхронных электродвигателей в соответствии с полученным значением первой производной и заданными параметрами конкретного электродвигателя.
Предлагаемые варианты отличаются составом операции определения первой производной, которые тем не менее эквивалентны по достигаемому результату, обеспечивающему расширение функциональных возможностей синхронных и асинхронных электродвигателей, находящихся в системе электропривода, и питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения. По указанным причинам сущность изобретений по каждому из вариантов способа является равноценной, а существенные отличия, обеспечивающие достижение поставленной задачи, не могут быть объединены обобщающими или альтернативными признаками и потому представлены в виде независимых объектов.
За счет указанной совокупности отличительных признаков предлагаемые варианты способа позволяют определять ЭДС ротора синхронных электродвигателей и ток ротора асинхронных электродвигателей, используя информацию непосредственно из их фазного тока или тока потребления инвертора без применения дополнительных высокоточных датчиков, располагаемых на двигателе и без дополнительных коммутаций. Поскольку используемый сигнал несет непосредственную информацию о величине и фазе ЭДС ротора синхронных и тока ротора асинхронных электродвигателей, то способ обладает высокой точностью, а при возможности обновления получаемой информации шесть раз за период питающего напряжения (в соответствии с принципом действия трехфазного мостового инвертора) достигается высокое быстродействие устройств, реализующих данный способ.
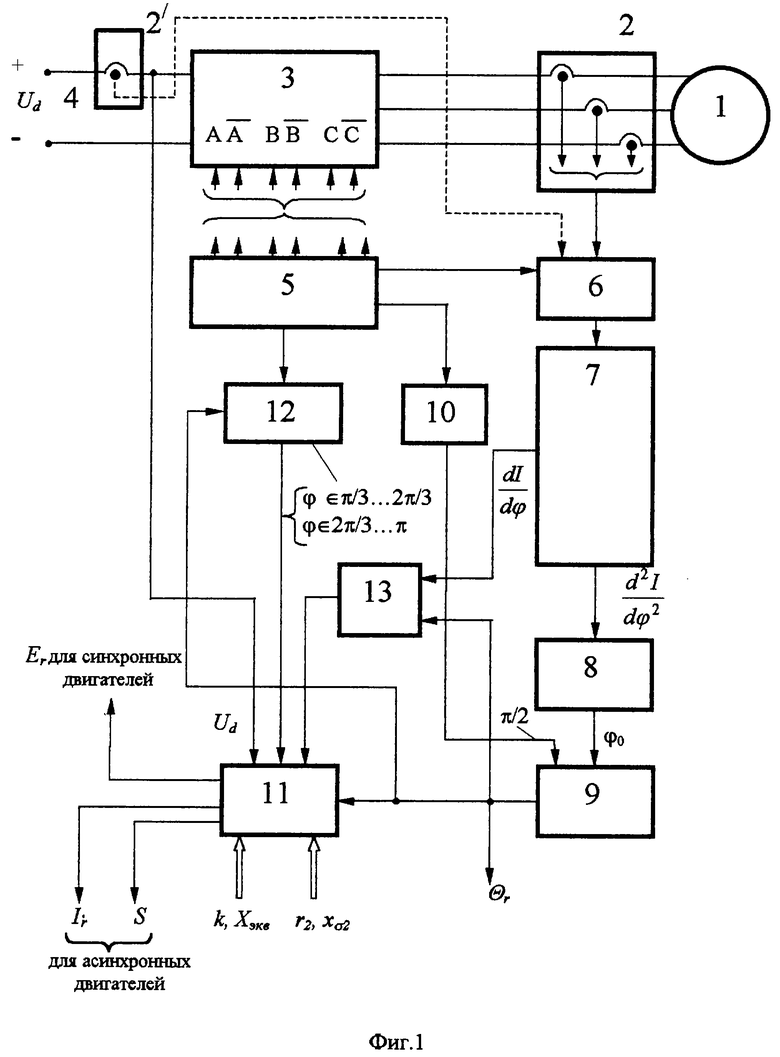
На фиг.1 приведена функциональная схема устройства, реализующего предлагаемые варианты способа определения ЭДС ротора синхронных и тока ротора асинхронных электродвигателей.
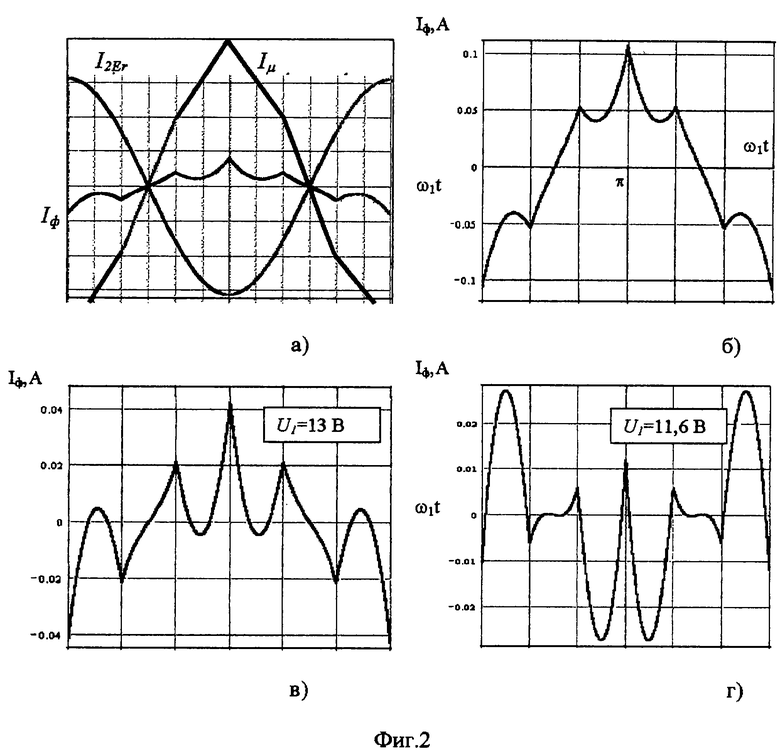
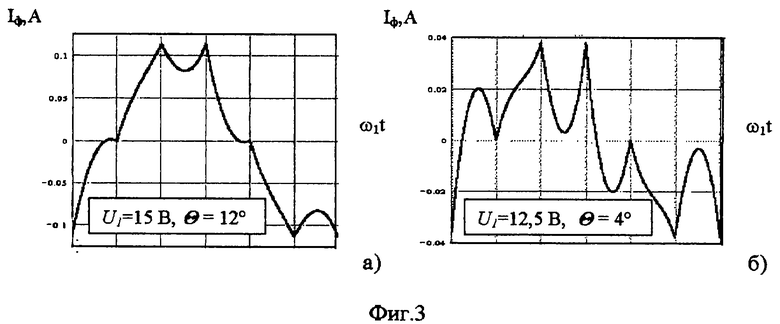
На фиг. 2, 3 представлены фазные токи синхронных и асинхронных электродвигателей при идеальном холостом ходе и активном сопротивлении, равном нулю, а также при наличии активного фазного тока (при нагрузке на валу или активных сопротивлениях двигателя, не равных нулю).
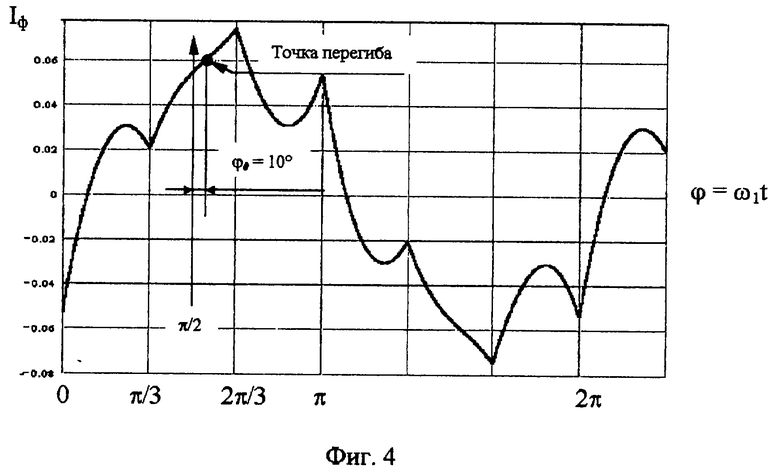
Фиг. 4 иллюстрирует определение точки перегиба (точки обращения в нуль второй производной) в кривой фазного тока, фаза которой используется в качестве первичного сигнала для осуществления способа определения ЭДС ротора синхронных двигателей или тока ротора асинхронных электродвигателей.
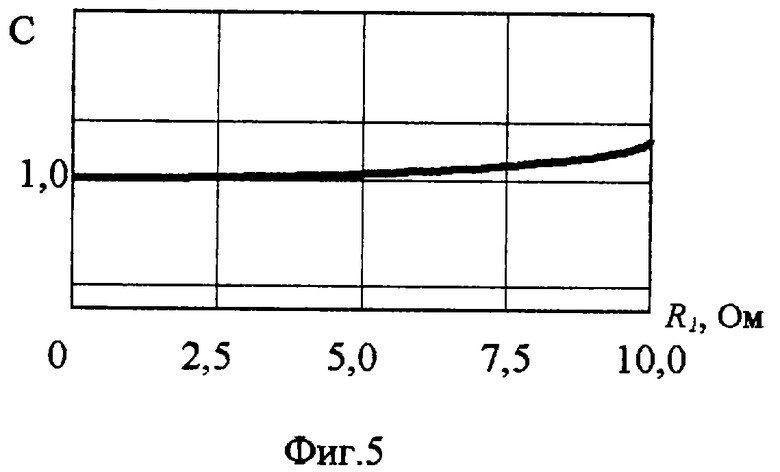
Фиг.5 поясняет влияние активного сопротивления фазной обмотки статора на точность формирования первичного сигнала для осуществления способа определения ЭДС ротора синхронных электродвигателей или тока ротора асинхронных электродвигателей (на примере гироскопического синхронно-гистерезисного электродвигателя).
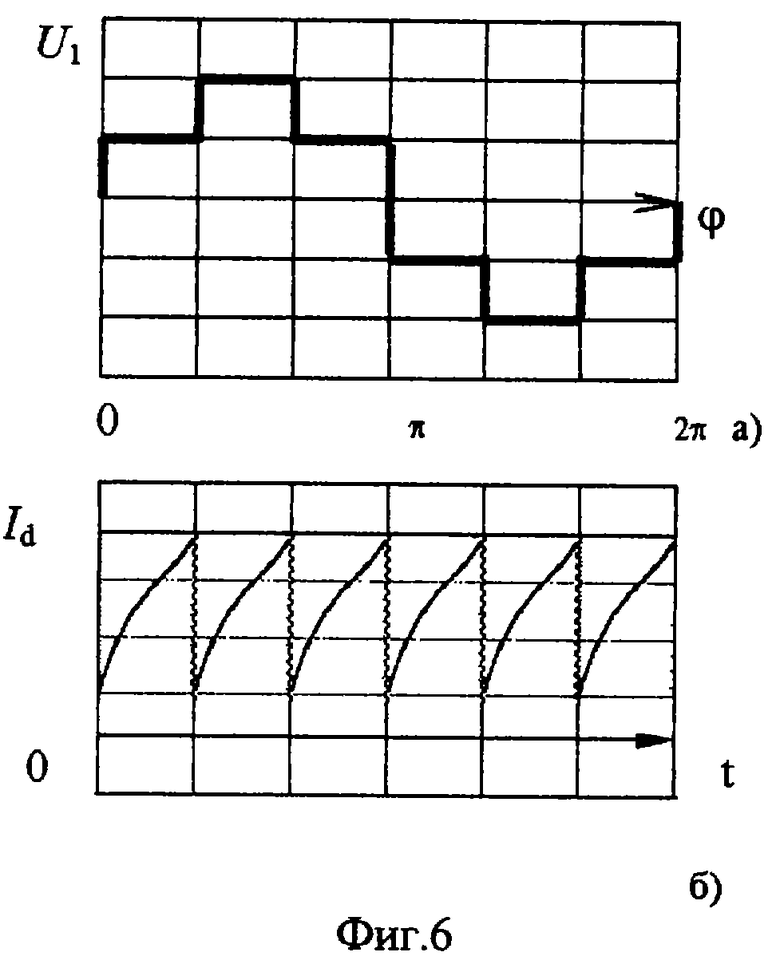
На фиг.6а, б представлены соответственно выходное фазное прямоугольно-ступенчатое напряжение инвертора и соответствующий ему ток потребления.
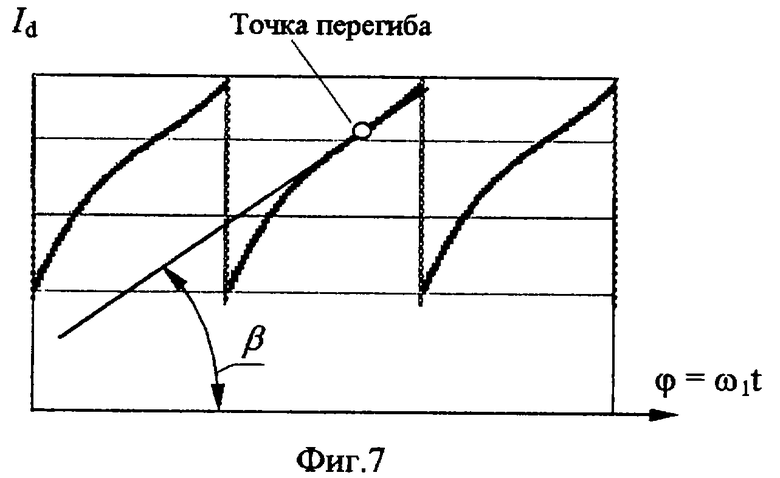
Фиг. 7 поясняет процесс определения первой производной в точке перегиба тока потребления инвертора.
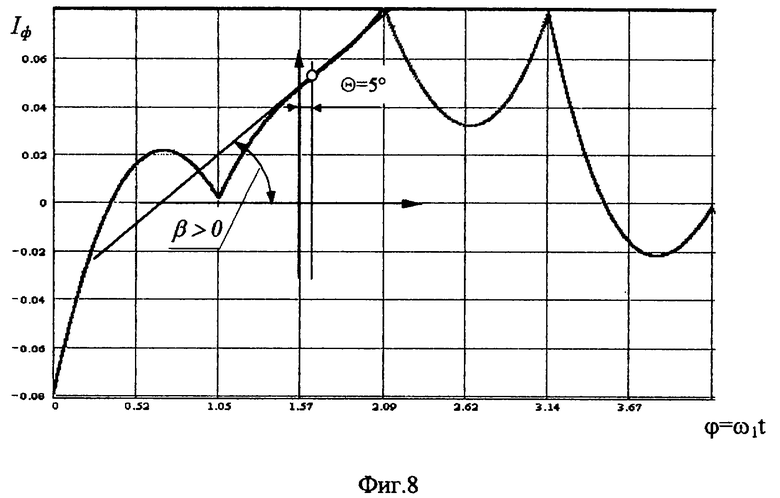
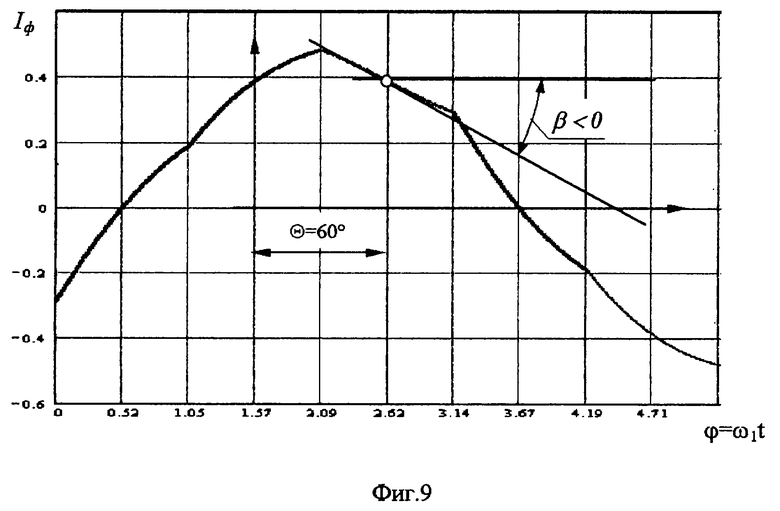
Фиг. 8, 9 - то же для кривой фазного тока соответственно на интервалах (π/3÷2π/3) и (2π/3÷π).
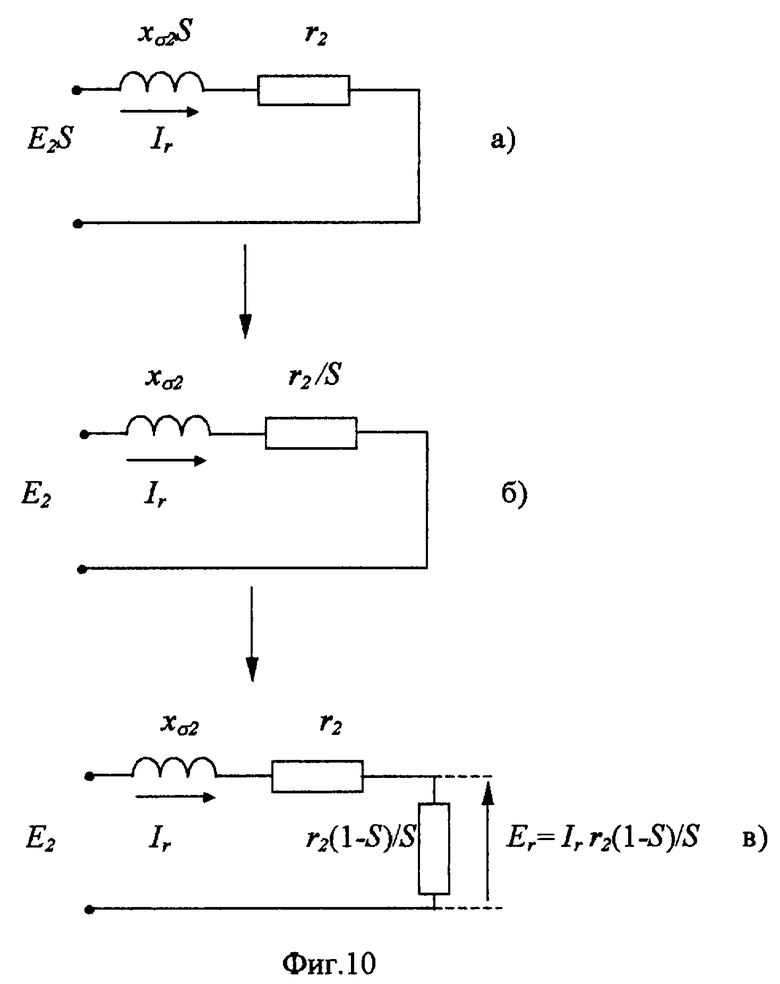
Фиг. 10а-в поясняет математический прием перехода от режима вращающегося ротора асинхронного двигателя к неподвижному, а также содержание вторичной ЭДС, дающей реакцию в обмотке статора.
Устройство содержит электродвигатель 1 переменного тока, соединенный цепями статора через датчик 2 фазных токов с выходом инвертора 3 напряжения, силовой вход которого через датчик 2' тока потребления соединен с источником 4 постоянного тока. Инвертор 3 напряжения своим управляющим многофазным входом подключен к первому многофазному выходу схемы 5 управления, второй выход которой соединен с первым входом коммутатора 6, соединенным вторым входом с датчиком 2 фазных токов или датчиком 2' тока потребления. Коммутатор 6 соединен с дифференциатором 7, первый выход которого через нуль-орган 8 подключен к первому входу фазового дискриминатора 9, второй вход которого через устройство 10 формирования начала отсчета подключен к третьему выходу схемы 5 управления. Выход фазового дискриминатора 9 соединен с первым информационным входом вычислителя 11 и первым входом схемы 12 определения коммутационных интервалов. Второй информационный вход вычислителя 11 соединен со входом инвертора 3. Третий и четвертый информационные входы вычислителя 11 предназначены для ввода параметров электродвигателя. Первый управляющий вход вычислителя 11 подключен к выходу схемы 12 определения коммутационных интервалов, второй вход которой подключен к четвертому выходу схемы 5 управления. Второй управляющий вход вычислителя 11 соединен с выходом коммутатора 13, первый вход которого соединен со вторым выходом дифференциатора 7, а второй вход соединен с выходом фазового дискриминатора 9. Информация о фазе ЭДС ротора (т.е. текущем угле нагрузки) синхронных электродвигателей или тока ротора (т.е. угле фазового сдвига тока ротора относительно ЭДС воздушного зазора) для асинхронных электродвигателей выводится с выхода дискриминатора 9; информация о величине ЭДС ротора синхронных электродвигателей или тока ротора и скольжения асинхронных электродвигателей - с выхода вычислителя 11.
В качестве датчиков 2, 2' могут быть использованы стандартные датчики, основанные на эффекте Холла. Инвертор 3 выполняется по мостовой схеме с мостом обратных диодов. Коммутатор 6 представляет собой набор логически коммутируемых ключей. Дифференциатор 7 выполняется на аналоговых операционных усилителях с резистивно-емкостными цепями, либо в цифровом виде. Нуль-орган 8 представляет собой компаратор. Совокупность устройств 5, 9 - 13, производящих функции формирования сигналов управления инвертором и вычисления, может быть реализована на программируемом микроконтроллере.
Способ определения ЭДС ротора синхронных электродвигателей и тока ротора асинхронных электродвигателей заключается в следующем.
Образование в электрических машинах переменного тока электромагнитных сил и вращающих моментов можно рассматривать как результат взаимодействия неподвижных друг относительно друга пространственных волн тока статора с волнами распределения индукции магнитного поля вдоль окружности ротора. При этом отличный от нуля вращающий момент создается взаимодействием указанных волн одинакового порядка, а гармоники различных порядков создают моменты, суммарная величина которых равна нулю [А.И. Вольдек. Электрические машины. - Л.: Энергия, 1974, с. 515].
В асинхронных электродвигателях образование токового слоя, потока, индукции ротора и момента есть следствие скольжения ротора относительно пространственных волн МДС статора.
В синхронно-гистерезисных двигателях, где токовый слой ротора физически отсутствует, пространственная волна индукции ротора образуется за счет ориентирования магнитных доменов материала ротора по МДС статора, а момент есть следствие взаимного пространственного расположения ("угла нагрузки") указанных волн и при постоянной степени возбуждения ротора не зависит от скольжения.
В синхронных двигателях как магнитоэлектрического, так и электромагнитного исполнения, пространственная волна индукции ротора является независимой от МДС статора величиной, а момент при прочих равных условиях есть следствие взаимного пространственного расположения волн МДС статора и волны индукции ротора, сцепленной в отличие от синхронно-гистерезисного двигателя жестко с ротором в любых режимах работы.
При наличии в воздушном зазоре у вышеперечисленных двигателей временных и пространственных гармонических составляющих электромагнитных полей, форма пространственной составляющей не зависит от формы питающего напряжения, а определяется лишь конструктивными особенностями и распределением фазных обмоток статора в пространстве. На практике стремятся к организации синусоидального закона пространственной МДС статора, что в электродвигателях переменного тока приводит к синусоидальной форме волны индукции ротора, причем высокого качества в электрических машинах специального назначения - гиродвигателях, ультрацентрифугах и т.п.
Синусоидально-распределенные вращающиеся пространственные волны индукции ротора создают в неподвижных обмотках статора синусоидальную реакцию в виде ЭДС вращения. Примечательно то, что в синхронных двигателях и синхронно-гистерезисных, работающих в синхронном режиме, термин "ЭДС вращения" однозначно соответствует факту вращения ротора. В случае же синхронно-гистерезисных двигателей, работающих со скольжением, "ЭДС вращения" однозначно относится лишь к доменной структуре ротора, следующей синхронно за вращающимся полем статора, и создающей такую же реакцию в обмотке статора как и в синхронном режиме.
В асинхронном двигателе "ЭДС вращения" можно однозначно отнести к вращающемуся синхронно с полем статора токовому слою ротора независимо от его скольжения.
Реакцию ротора в виде ЭДС вращения можно наблюдать в фазном токе синхронных и асинхронных двигателей, питающихся от статического преобразователя напряжения с прямоугольно-ступенчатой формой выходного напряжения. В этом случае статический преобразователь является не только источником питания электродвигателя, но и своеобразным задатчиком стандартного ступенчатого воздействия, позволяющим на фоне экспоненциально изменяющейся во времени составляющей тока от инвертора, выделить наличие пространственной синусоидальной составляющей волны тока от ротора с дальнейшей идентификацией ее параметров.
При питании электродвигателя переменного тока от трехфазного инвертора напряжения с простейшей прямоугольно-ступенчатой формой напряжения фазный ток I1= Iф на коммутационных интервалах 0÷π/3; π/3÷2π/3; 2π/3÷π для рабочей точки при пренебрежении потерями в намагничивающем контуре схемы замещения можно представить соответственно токами I1(ϕ), I2(ϕ), I3(ϕ):
где Rэкв, Хэкв - соответственно эквивалентные активное и реактивное сопротивления фазы двигателя;
k=Rэкв/Хэкв; α=arctg (Хэкв/Rэкв); Еr - фактическая ЭДС ротора; ϕ = ω1t; ω1 - круговая частота;
ϕ = ω1t; ω1 - круговая частота;
ϕ - текущее значение фазы;
Ud - постоянное напряжение на входе инвертора;
Θ - фаза ЭДС Еr.
При этом физическое и количественное содержание Rэкв, Хэкв и Еr определяется для конкретной разновидности электродвигателя переменного тока.
На фиг.2а представлено графическое пояснение формы фазного тока на примере синхронно-гистерезисного электродвигателя при идеальном холостом ходе и активном сопротивлении обмотки статора, стремящемся к нулю. На фиг.2б-г - то же при различных степенях намагниченности ротора. Характерным является симметричная форма тока относительно π вне зависимости от степени намагничивания ротора. Такая форма объясняется тем, что всегда симметричная относительно π и состоящая практически из отрезков прямых чисто реактивная составляющая тока инвертора Iμ суммируется в данном случае с составляющей тока от фактической ЭДС Еr I2Er, также симметричной относительно π так как угол нагрузки Θ=0. При наличии активного сопротивления статорной обмотки R1 (равно, как и потерь в стали rm возрастании нагрузки на валу или в режиме скольжения) симметрия нарушается. При этом ток возрастает на интервале 0÷π, причем в наибольшей степени в зоне ϕ = 0÷π/2 за счет возрастания активной составляющей (фиг. 3а, б). Подобная картина наблюдается и для синхронных электродвигателей.
Для асинхронных электродвигателей при холостом ходе фактическая ЭДС ротора (в отличие от приведенной) Er≈0, фазный ток представляет собой практически отрезки экспонент (или прямых при R1=0), и в токе реального электродвигателя присутствует лишь весьма незначительная "гистерезисная" составляющая момента. Форма фазного тока асинхронного электродвигателя при нагрузке и питании от инвертора аналогична форме тока синхронных машин.
Участки фазных токов π/3÷2π/3 и 2π/3÷π (фиг.4) представляют интерес как носители информации об угле Θ нагрузки синхронных и синхронно-гистерезисных машин или (при аналогичном обозначении) угла Θ фазового сдвига тока ротора относительно ЭДС воздушного зазора асинхронных. Согласно сформулированным представлениям и из фиг. 2а следует, что точка перегиба ϕ0 кривой тока на интервале π/3÷2π/3 совпадает с единственной точкой перегиба синусоидального тока I2Er при переходе через нуль, отстающего от ЭДС Er на π/2 (ток от инвертора на этом интервале представляет наклонную прямую при R1=0). Если координата ϕ = π/2 в принятой системе соответствует оси фазной обмотки, или с точностью до падения напряжения на активном сопротивлении статора R1 вектору напряжения U1, то значение угла Θ = ϕ0-π/2. При углах Θ>π/6 точка перегиба перемещается на интервал 2π/3÷π, хотя реальные углы Θ применяемых электродвигателей, как правило, не превышают указанного значения. Математически можно показать, что вторая производная фазного тока на указанных интервалах точно обращается в нуль при соответствующих углах Θ, характеризуемых точкой перегиба кривой тока, и при пренебрежении активным сопротивлением статора, т.е. R1-->0:
Примечательно то, что и при наличии активного сопротивления обмотки статора (по крайней мере, в диапазонах реальных значений) точка перегиба соответствует углу Θ. Данный факт объясняется тем, что изменение активного сопротивления статора в равной степени и в одном направлении влияет на сдвиг составляющих тока от инвертора и фактической ЭДС ротора. При обозначении составляющих выражения (2) для тока I2(ϕ) соответственно M(R1, ϕ) и N(R1, ϕ) можно показать, что
Фиг. 5 иллюстрирует выражение (6) для реальных гироскопических синхронно-гистерезисных электродвигателей.
Следствием равенства нулю второй производной фазного тока в точке перегиба является постоянство первой производной в этой же точке. С другой стороны, по математическому определению, первая производная функции есть тангенс угла наклона касательной к дифференцируемой функции относительно оси аргумента. Согласно данному заключению имеем:
Для точки ϕ = π/2+Θ после преобразований получим:
для интервала π/3÷2π/3)+nπ;
для интервала (2π/3÷π)+nπ,
где  амплитудное значение фазного напряжения инвертора (или электродвигателя);
амплитудное значение фазного напряжения инвертора (или электродвигателя);
β - угол наклона касательной в точке обращения в нуль второй производной фазного тока электродвигателя;
Θ - фаза ЭДС ротора синхронных электродвигателей (угол нагрузки) и тока ротора асинхронных электродвигателей;
При этом значение производной tgβ выражается в [А/рад].
Известно, что огибающая тока потребления инвертора напряжения складывается из участков фазных токов на интервале π/3÷2π/3 (фиг.6а) [B.C. Руденко, В. И. Сенько, И.М. Чиженко. Преобразовательная техника. - Киев: Вища школа, 1978, с.320]. Исходя из этого факта информацию о точке перегиба и первую производную в ней на кривых фазных токов на указанных интервалах при углах Θ<π/6 можно получить в цепи постоянного тока инвертора.
В асинхронном электродвигателе ток ротора Ir образуется под воздействием ЭДС Е2, наведенной в обмотках ротора вращающемся полем статора. Величина и фаза Θ этого тока относительно ЭДС Е2 определяется скольжением S и соотношением активного r2 и индуктивного xσ2 сопротивлений ротора:
Переходя от вращающегося ротора к неподвижному имеем:
"Восстановив" в электрической схеме замещения цепи ротора (фиг.10а-в) вновь активное сопротивление ротора r2, для сохранения прежнего электрического баланса введем дополнительное сопротивление  символизирующее преобразование энергии во вторичной цепи. Тогда величина ЭДС
символизирующее преобразование энергии во вторичной цепи. Тогда величина ЭДС
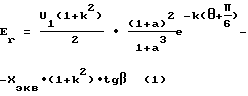
будет характеризовать реакцию от ЭДС ротора Er в цепи статора согласно выражений (1)-(3) и (10), (11) (фиг.10а-в). В этом случае, подставляя (15) в (10), (11) и учитывая, что скольжение S однозначно определяется известным выражением
после преобразований получим выражения для тока ротора:
для интервала (π/3÷2π/3)+nπ,
для интервала (2π/3÷π)+nπ.
Устройство, представленное на фиг.1, работает следующим образом.
При подаче напряжения питания схема 5 управления формирует трехфазную систему напряжений с относительным сдвигом фаз в 120o (эл.), необходимых для работы инвертора 3, в результате которой на его выходе формируется трехфазное прямоугольно-ступенчатое напряжение (фиг. 6а). Дифференциатор 7 на одном из коммутационных интервалов вычисляет текущее значение первой и второй производной фазного тока инвертора по углу ϕ = ω1t, информация о котором поступает с выхода коммутатора 6. В зависимости от режима работы, отражающего варианты представленного способа, сигнал на вход дифференциатора 7 через коммутатор 6 может поступать либо с датчика 2 фазных токов, либо с датчика 2' тока потребления, расположенного в цепи постоянного тока инвертора 3. Очевидно, что информация с датчика 2' тока потребления может обновляться шесть раз за период питающего напряжения. В первом случае сигнал может формироваться либо от одной из фаз на одном из коммутационных интервалов инвертора (π/3÷2π/3)+nπ или (2π/3÷π)+nπ относительно значения π/2, где n=0, 1, 2, ...., либо с трех фаз по мере появления очередного измерительного интервала, а это происходит также шесть раз за период питающего напряжения в последовательности: фаза А; фаза  фаза В; фаза
фаза В; фаза  фаза С; фаза
фаза С; фаза  и т.д., где знак "-" над буквой означает инверсию. Нуль-орган 8 определяет фазу ϕ0 второй производной, которая поступает на первый вход фазового дискриминатора 9. При этом на его втором входе присутствует значение фазы π/2, сформированное устройством 10 начала отсчета.
и т.д., где знак "-" над буквой означает инверсию. Нуль-орган 8 определяет фазу ϕ0 второй производной, которая поступает на первый вход фазового дискриминатора 9. При этом на его втором входе присутствует значение фазы π/2, сформированное устройством 10 начала отсчета.
При работе электродвигателя 1 схема 12 определения коммутационных интервалов, реализуя функцию принадлежности [ϕ∈π/3...2π/3; ϕ∈2π/3...π], приводит в соответствии с типом двигателя и рабочим интервалом измерения тип выражения: (10) или (11) - для синхронных двигателей; (16)-(18) - для асинхронных. Выражения решаются в вычислителе 11, в который также вводятся напряжение питания инвертора 3 и составляющие параметров конкретного двигателя 1. Процесс вычисления в вычислителе 11 начинается непосредственно после поступления на его второй управляющий вход сигнала с выхода коммутатора 13, формирующего значение первой производной фазного тока двигателя 1 или тока потребления инвертора 3 в точке обращения в нуль его второй производной (т.е. в окрестности точки перегиба ϕ0 = π/2+Θ). Полученное в результате вычисления значение ЭДС ротора синхронных электродвигателей или тока асинхронных электродвигателей сохраняется на выходе вычислителя 11 до следующего цикла вычисления.
Таким образом, предложенные варианты способа позволяют определить наряду с фазой величину ЭДС ротора синхронных электродвигателей или тока ротора асинхронных электродвигателей, используя информацию непосредственно из их фазного тока без применения дополнительных высокоточных датчиков, располагаемых на электродвигателе. Поскольку используемый сигнал фактически несет непосредственную информацию об ЭДС ротора синхронных электродвигателей и тока ротора асинхронных электродвигателей, то способ обладает высокой точностью, а при обновлении информации шесть раз за период питающего напряжения достигается высокое быстродействие устройств, реализующих данный способ. Другими словами, устройства, способные реализовать данный способ, фактически являются бесконтактными измерителями следующих величин:
для синхронных электродвигателей - фазы (т.е. угла нагрузки) и амплитуды ЭДС ротора;
для асинхронных электродвигателей - фазы, скольжения и амплитуды тока ротора;
следовательно, могут применяться для дальнейшего вычисления потока и потокосцепления ротора, момента двигателя (в том числе и без доступа к валу) с целью построения высококачественных инверторных электроприводов, использующих, например, принципы векторного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2001 |
|
RU2193212C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU2069033C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2007010C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ M-ФАЗНЫМ ИНВЕРТОРОМ | 1990 |
|
RU2013851C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1987 |
|
SU1816182A1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ | 1993 |
|
RU2037936C1 |
| СПОСОБ ДИАГНОСТИКИ КОМБИНАЦИОННЫХ ЛОГИЧЕСКИХ СХЕМ | 1991 |
|
RU2017207C1 |
Изобретение относятся к электротехнике и может быть использовано для управления электродвигателями переменного тока - синхронными, синхронно-гистерезисными или асинхронными, как общего применения, так и специального, выполненными без доступа к валу, например гироскопическими, или используемыми в многодвигательных электроприводах синхронного вращения. Технический результат заключается в расширении функциональных возможностей синхронных и асинхронных электродвигателей в системе электропривода, и питающихся от статических преобразователей напряжения, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения. В способе определения ЭДС ротора синхронных и тока ротора асинхронных электродвигателей, питающихся от статического преобразователя напряжения, фазу ЭДС ротора синхронных и тока ротора асинхронных электродвигателей определяют по фазе второй производной фазного тока электродвигателя на одном из коммутационных интервалов инвертора статического преобразователя напряжения (π/3-2π/3)+nπ или (2π/3-π)+nπ относительно значения π/2, где n=0, 1, 2..., определяют первую производную фазного тока в точке обращения в нуль его второй производной на одном из коммутационных интервалов инвертора (π/3-2π/3)+nπ или (2π/3-π)+nπ, при этом величину ЭДС ротора синхронных электродвигателей и тока ротора асинхронных электродвигателей определяют в соответствии с полученным значением первой производной и заданными параметрами конкретного электродвигателя. 2 с. и 1 з.п. ф-лы, 10 ил.
для интервала π/3÷2π/3)+nπ,
для интервала (2π/3÷π)+nπ,,
а величину тока ротора асинхронных электродвигателей определяют в соответствии с выражениями:
для интервала (π/3÷2π/3)+nπ,
для интервала (2π/3÷π)+nπ,
где: k=Rэкв/Хэкв; 
Rэкв, Хэкв - соответственно активное и эквивалентное реактивное сопротивления фазы двигателя; - амплитудное значение фазного напряжения инвертора;
- амплитудное значение фазного напряжения инвертора;
Ud - постоянное напряжение на входе инвертора;
β - угол наклона касательной в точке обращения в нуль второй производной фазного тока электродвигателя;
θ - фаза ЭДС ротора синхронных электродвигателей (угол нагрузки) и тока ротора асинхронных электродвигателей;
Еr - ЭДС ротора синхронных электродвигателей;
Ir - ток ротора асинхронных электродвигателей;
r2,xσ2 - соответственно активное и индуктивное сопротивления рассеяния фазы ротора асинхронных электродвигателей. ; фаза В; фаза
; фаза В; фаза  ; фаза С; фаза
; фаза С; фаза  и т.д.
и т.д.
а величину тока ротора асинхронных электродвигателей определяют в соответствии с выражением:
где k=Rэкв/Хэкв; 
Rэкв, Хэкв - соответственно активное и эквивалентное реактивное сопротивления фазы двигателя; амплитудное значение фазного напряжения инвертора;
амплитудное значение фазного напряжения инвертора;
Ud - постоянное напряжение на входе инвертора;
β - угол наклона касательной в точке обращения в нуль второй производной фазного тока электродвигателя;
θ - фаза ЭДС ротора синхронных электродвигателей (угол нагрузки) и тока ротора асинхронных электродвигателей;
Еr - ЭДС ротора синхронных электродвигателей;
Ir - ток ротора асинхронных электродвигателей;
r2,xσ2 - соответственно активное и индуктивное сопротивления рассеяния фазы ротора асинхронных электродвигателей.
| ДЕЛЕКТОРСКИЙ Б.А | |||
| и др | |||
| Возможности сокращения времени разбега гистерезисного привода гироротора | |||
| Труды МЭИ | |||
| - М., 1977, вып | |||
| Ручной ткацкий станок | 1922 |
|
SU339A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ПОГРУЖНЫХ НАСОСНЫХ АГРЕГАТОВ | 1997 |
|
RU2150780C1 |
| DE 3207439 А1, 09.08.1983 | |||
| Сенсорный переключатель | 1977 |
|
SU661800A1 |
| Устройство для установки колеблющегося инструмента | 1980 |
|
SU973252A1 |

