Область изобретения
Настоящее изобретение относится к устройству и способу привода антенны в устройстве радиосвязи и касается, в частности, устройства и способа автоматического привода выдвижной антенны радиотелефона, у которого с помощью двигателя в начале сеанса связи антенна автоматически выталкивается из кожуха антенны, а в конце сеанса связи автоматически втягивается обратно в кожух антенны.
Обзор известных технических решений
В настоящее время обычные стандартные радиотелефоны, например сотовый радиотелефон, городской телефон, персональная система связи или аналогичные им, используют антенны выдвижного типа. Исследования показывают, что интенсивность излученной электромагнитной волны, когда мы используем радиотелефон в состоянии с полностью выдвинутой из кожуха антенной, составляет 1/3 от интенсивности для случая, когда мы используем радиотелефон в состоянии с полностью убранной в кожух антенной. Соответственно использование радиотелефона в состоянии, когда антенна полностью выдвинута из своего кожуха, уменьшает вред, который может быть причинен здоровью абонента из-за излучаемых антенной электромагнитных волн.
Сегодня мы также можем встретить некоторые стандартные радиотелефоны, использующие антенны с приводом ручного типа, у которых сам абонент вручную выдвигает или задвигает антенну из/в кожух антенны в начале или в конце сеанса связи соответственно. Однако описаны и некоторые другие радиотелефоны, в которых, чтобы избежать этого неудобства, используются устройства автоматического выдвижения/втягивания антенны.
Средства автоматического привода антенны описаны в патенте США 5497506. Чтобы решить проблему известного устройства, в котором используется антенна подпружиненного типа и в котором антенна может выдвигаться из кожуха антенны нажатием кнопки, но абонент должен вручную нажимать на антенну, чтобы убрать ее обратно в кожух антенны, в упомянутом патенте предлагается устройство, управляющее антенной, которое содержит переключатели трех режимов работы ("ВЫКЛЮЧЕНО", "ОЖИДАНИЕ", "РАЗГОВОР") для перемещения антенны, и антенна выдвигается, когда выбирается "РАЗГОВОР", и втягивается, когда выбирается "ОЖИДАНИЕ".
Тем не менее, так как в этом механизме перемещения антенны ходовой винт, на котором сформирована гайка, должен устанавливаться на валу двигателя, гайка должна быть сформирована внизу антенны и антенна вертикально выдвигается и втягивается посредством обеих вращающихся с зацеплением гаек, то необходима антенна, специально предназначенная для этого механизма. Это создает новую проблему несовместимости с используемыми в настоящее время стандартными радиотелефонами. Кроме того, нет решения для проблем, создаваемых деформацией или изгибом антенны из-за внешнего мешающего усилия, которое часто может прилагаться во время перемещения антенны или ее долговременного использования, и имеются некоторые проблемы в долговечности и стабильности работы этого устройства.
Сущность изобретения
Первой целью настоящего изобретения является создание способа управления для автоматического выдвижения/втягивания антенны с помощью автоматического распознавания действий абонента при начале или завершении сеанса связи, уменьшения числа замен батареи путем минимизации потребления энергии при управлении антенной, защиты от повреждений, вызываемых механическим и электрическим ударом из-за внешнего мешающего усилия, который обладает гибкостью за счет возможности изменять режим привода антенны программными средствами.
Кроме того, второй целью настоящего изобретения является создание устройства для автоматического выдвижения/втягивания антенны, которое не только обеспечивает удобство, стабильность и гибкость согласно первой цели, но и не требует никаких изменений в конструкции стандартной антенны выдвижного типа, и которое, идя в ногу с текущей технической тенденцией миниатюризации радиотелефона, имеет настолько малые габариты, что может легко устанавливаться в кожухе антенны стандартного радиотелефона после небольшой модификации конструкции этого кожуха антенны.
Соответственно, чтобы достигнуть первой цели, предлагается способ автоматического выдвижения антенны из кожуха антенны и втягивания ее обратно в устройстве радиосвязи, согласно которому получают информацию о выдвижении и втягивании антенны из электрических сигналов, соответствующих операциям начала и завершения сеанса связи в упомянутом устройстве радиосвязи, исходя из вышеуказанной информации подают на двигатель сигнал управления двигателем для вращения двигателя по часовой стрелке и против часовой стрелки, параллельно с управлением двигателем подсчитывают с накоплением эффективное время работы двигателя и сравнивают это накопленное эффективное время работы двигателя с предварительно установленным временем, в течение которого антенна полностью выдвигается из кожуха антенны или втягивается обратно в случае, когда нет помех работе двигателя, причем обе упомянутые операции подсчета с накоплением и сравнения периодически повторяются до тех пор, пока двигатель работает, периодически проверяют на основании каждого из результатов повторяемых операций сравнения, не нагружен ли двигатель сверх номинального значения, когда эффективное время работы двигателя меньше, чем упомянутое предварительно установленное время, если двигатель нагружен сверх указанного номинального значения, повторяют до нескольких раз операции прерывания подачи сигнала управления двигателем так, что этот сигнал не подается на двигатель в течение заданного времени, пока перегрузка двигателя сверх номинального значения не будет устранена, и блокируют подачу сигнала управления двигателем на двигатель на основании каждого из результатов повторяемых операций сравнения, когда эффективное время работы двигателя становится равным указанному предварительно установленному времени.
Кроме того, для достижения второй цели, предусматривается устройство для автоматического выдвижения антенны из кожуха антенны и втягивания ее обратно в устройстве радиосвязи, которое содержит двигатель с валом для вращения этого вала по часовой стрелке или против часовой стрелки в соответствии с подаваемым для создания вращающего усилия сигналом управления двигателем, устройство управления для получения информации для выдвижения и втягивания антенны из электрических сигналов, соответствующих операциям начала и завершения сеанса связи в устройстве радиосвязи, и, исходя из этой информации, подачи на двигатель сигналов управления двигателем для вращения его по часовой стрелке и против часовой стрелки до тех пор, пока не истечет предварительно установленное время, в течение которого антенна полностью выдвигается из кожуха антенны или втягивается обратно в том случае, если нет помех работе вышеуказанного двигателя, и передаточный блок, являющийся съемным и выполненный как одно целое с вышеуказанным двигателем, для приложения к антенне усилия вращения, передаваемого от вала двигателя, для выдвижения/втягивания этой антенны из/в кожух антенны. Устройство дополнительно содержит также и средства крепления и амортизации ударов для плотного крепления узла двигателя и передаточного блока к корпусу антенны, амортизации вибрации, возникающей, когда двигатель вращается, и/или внешнего мешающего усилия, передаваемого на узел через антенну. Кроме того, устройство управления прерывисто подает сигналы управления двигателем на двигатель в пределах заранее заданного интервала времени и во время движения антенны проверяет, не создаются ли помехи движению антенны, а также, когда имеются помехи, выполняет определенную программу для обработки сбоев, чтобы защитить устройство управления от электрического и/или механического повреждения.
Устройство автоматического выдвижения и втягивания антенны согласно настоящему изобретению имеет преимущества, заключающиеся в достижении высокого качества речи и защиты абонента от вредного воздействия электромагнитных волн благодаря тому, что во время разговора абонента по радиотелефону антенна всегда полностью выдвигается. Кроме того, это устройство имеет минимизированные размеры, поэтому его можно будет применять в любом стандартном радиотелефоне, при этом оно способно эффективно сохранять энергию батареи благодаря прерывистой подаче электропитания на двигатель привода, является удобными в эксплуатации, так как оно воспринимает операции открывания и закрывания откидывающейся передней крышки и автоматически выдвигает и втягивает антенну, а также долговечно, поскольку сконструировано так, чтобы амортизировать внешние удары.
Краткое описание чертежей
На фиг. 1 дана блок-схема, показывающая общую конструктивную концепцию устройства автоматического выдвижения и втягивания антенны согласно одной из форм осуществления настоящего изобретения.
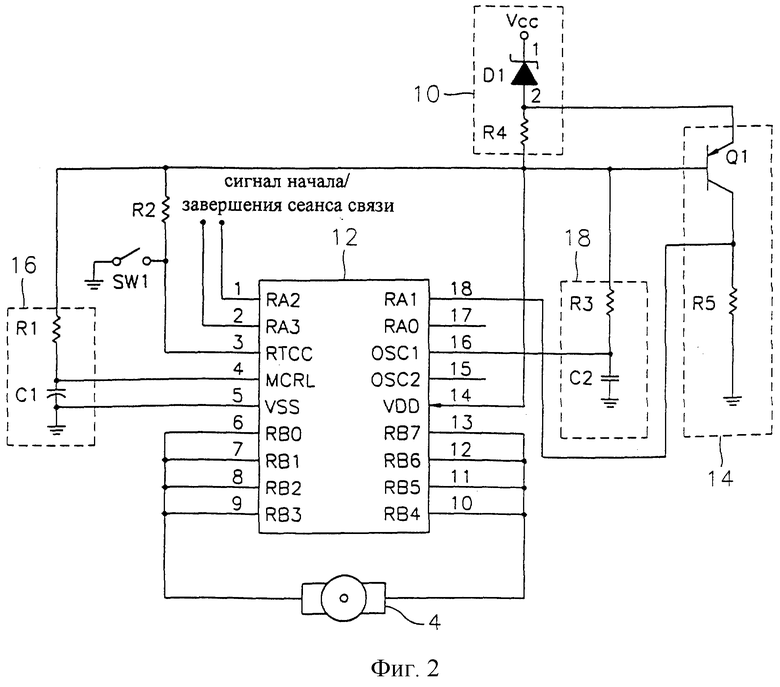
На фиг.2 дана схема устройства управления, показанного на фиг.1.
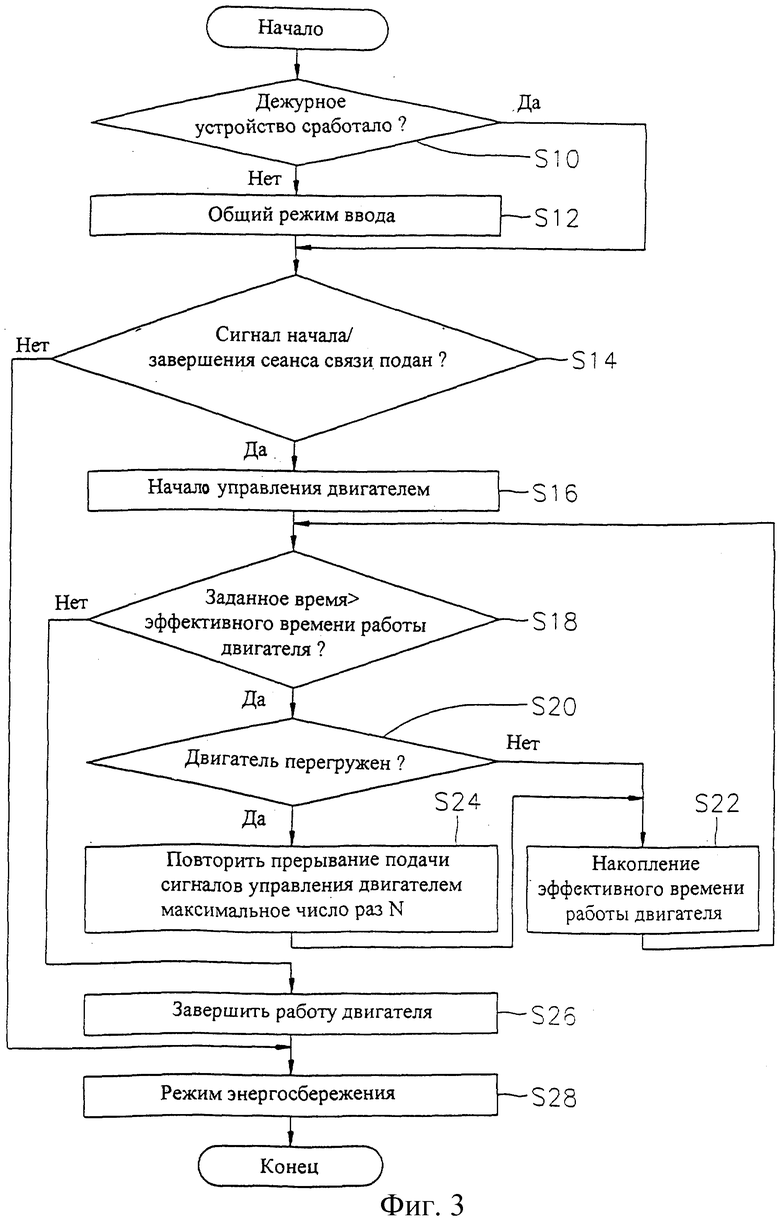
На фиг. 3 дана блок-схема, поясняющая способ управления для автоматического выдвижения/втягивания антенны, осуществляемого устройством управления, показанным на фиг.1.
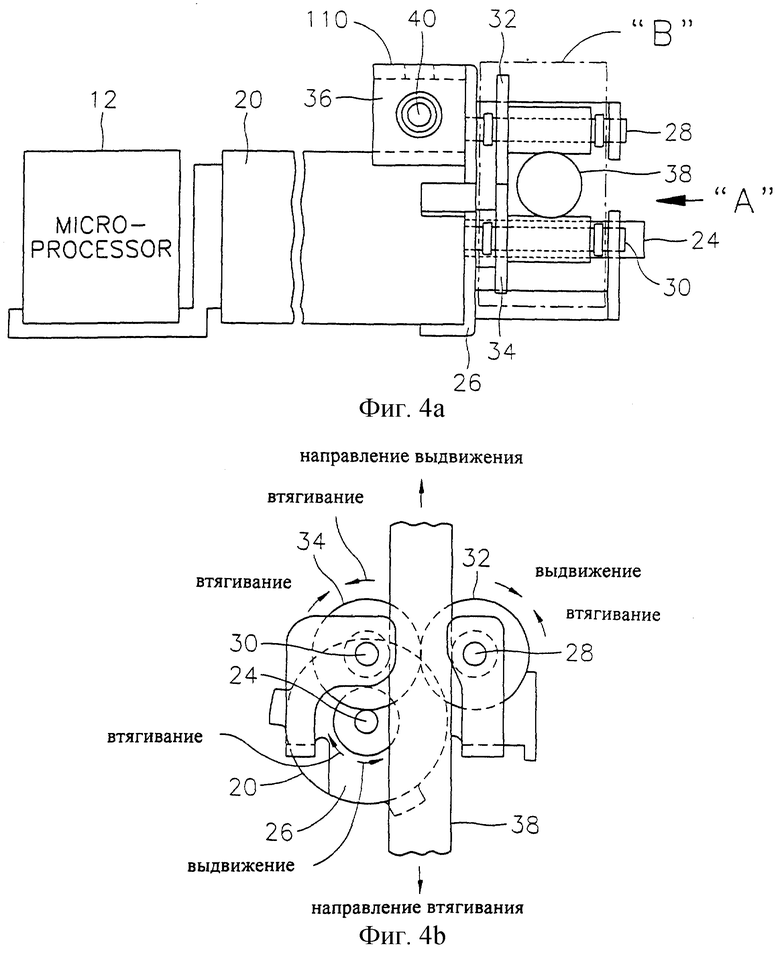
На фиг. 4а показан вид сверху устройства автоматического выдвижения/втягивания антенны, поясняющий механизм перемещения антенны в соответствии с первой формой осуществления настоящего изобретения.
На фиг. 4b показан вид устройства сбоку, обозначенный стрелкой "А" на фиг.4а.
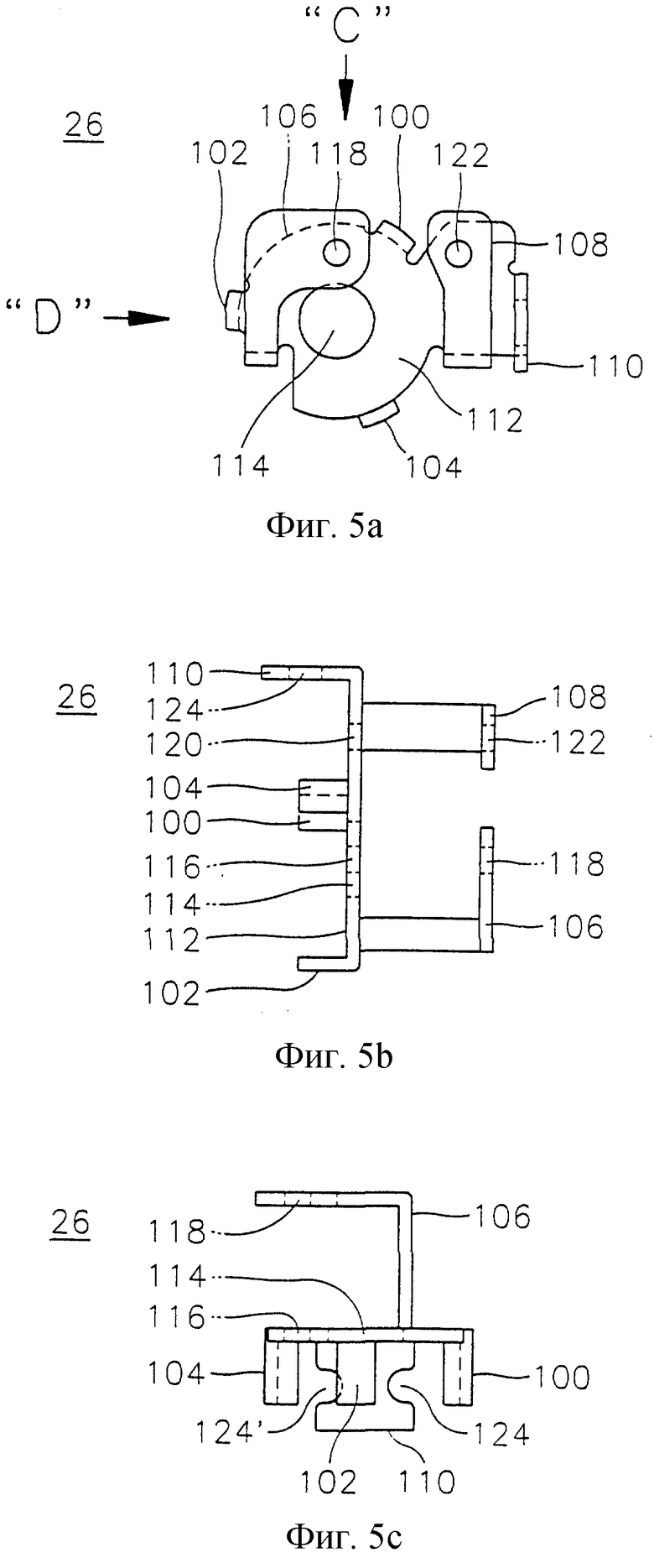
На фиг.5а показан вид сверху корпуса передачи, который является одной из деталей показанного на фиг.4а передаточного блока, направление наблюдения указано стрелкой "А" на фиг.4а.
На фиг.5b дан вид сбоку для корпуса передачи, показанного на фиг.4а, направление указано стрелкой "С" на фиг.5а.
На фиг.5с показан вид снизу корпуса передачи, показанного на фиг.4а, направление указано стрелкой "D" на фиг.5а.
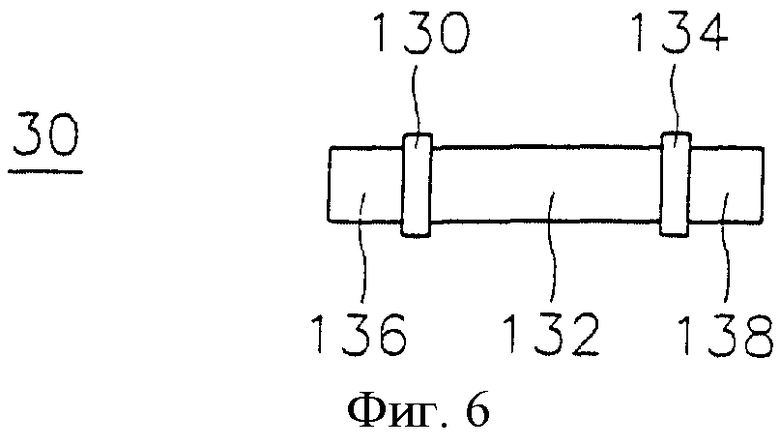
На фиг.6 показан вид сбоку передаточного вала, который является одной из деталей показанного на фиг.4а передаточного блока.
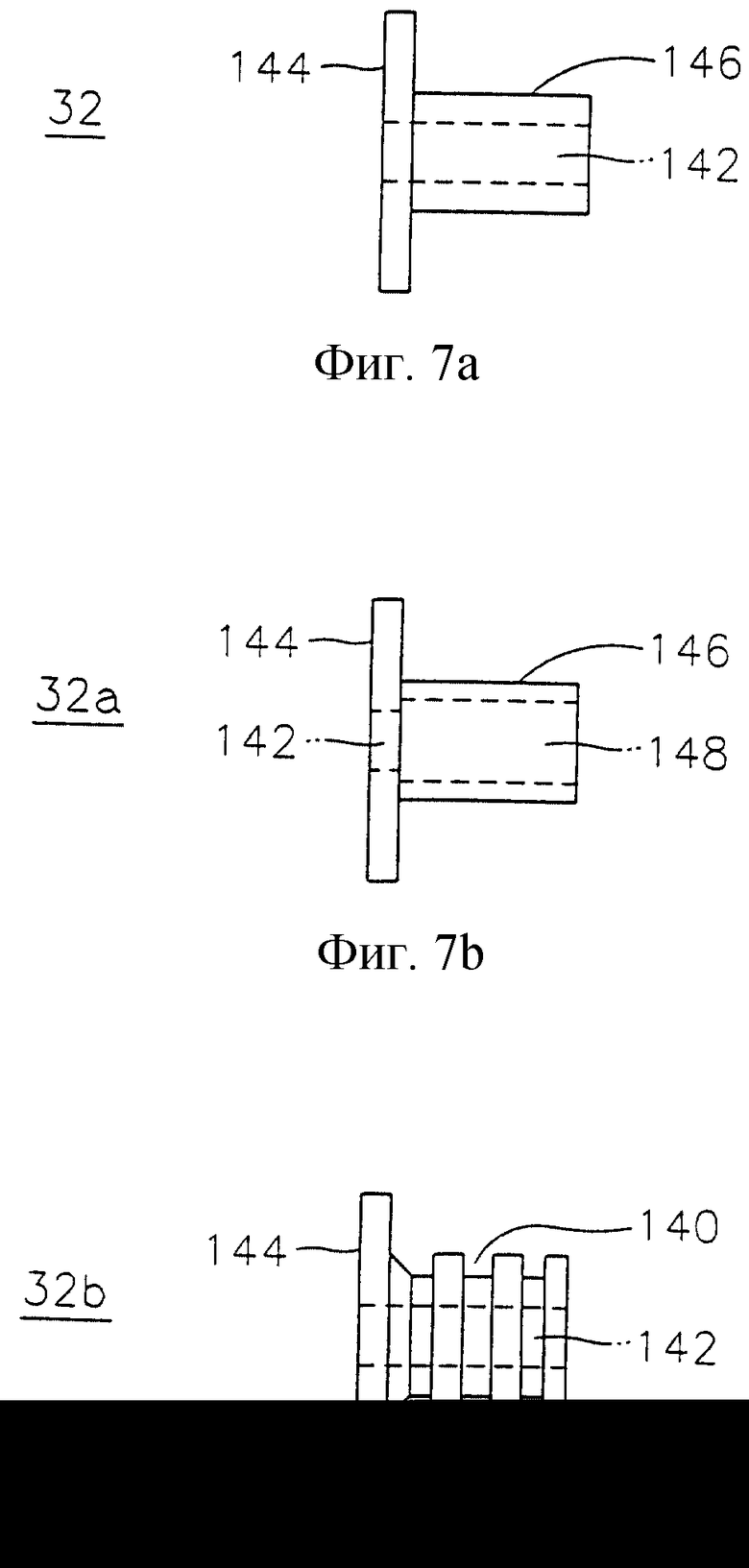
На фиг. 7а показан вид сбоку колеса, которое является одной из деталей показанного на фиг. 4а передаточного блока согласно первой форме осуществления настоящего изобретения.
На фиг. 7b показан вид сбоку колеса, которое является одной из деталей показанного на фиг. 4а передаточного блока согласно второй форме осуществления настоящего изобретения.
На фиг. 7с показан вид колеса, которое является одной из деталей показанного на фиг.4а передаточного блока согласно третьей форме осуществления настоящего изобретения.
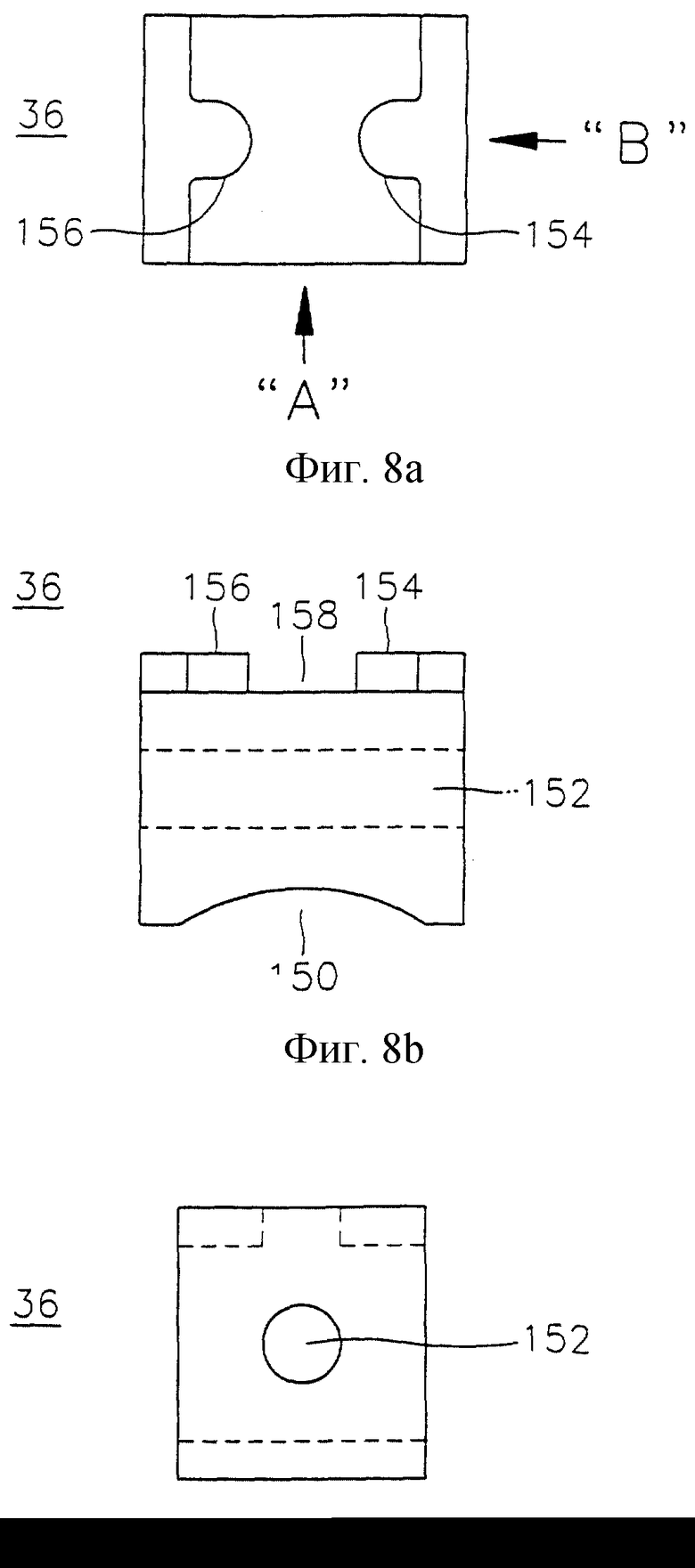
На фиг.8а показан вид сверху элемента, амортизирующего удары, направление указано стрелкой "А" на фиг.4а.
На фиг.8b показан вид сверху элемента, амортизирующего удары, направление указано стрелкой "А" на фиг.8а.
На фиг.8с показан вид сверху элемента, амортизирующего удары, направление указано стрелкой "А" на фиг.8а.
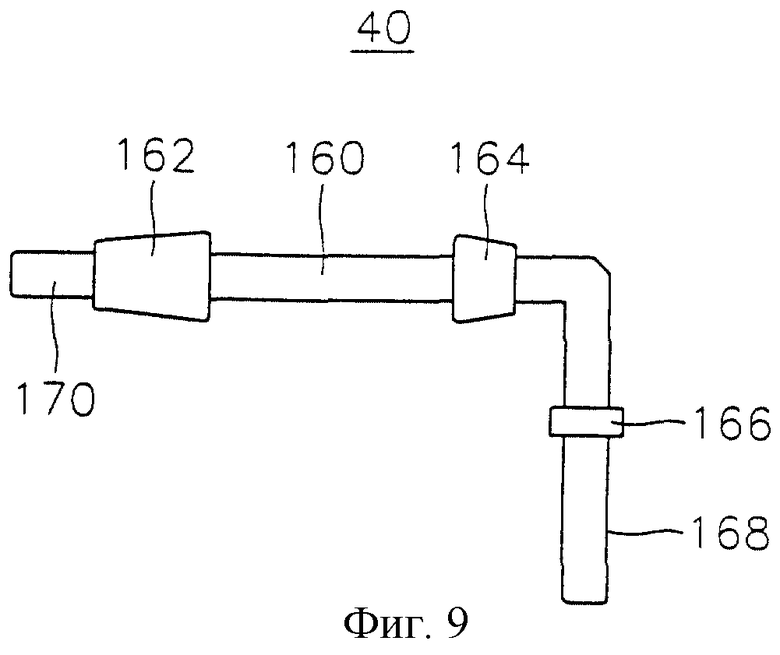
На фиг.9 показан вид сбоку крепежной шпильки, которая является одной из деталей показанного на фиг.4а передаточного блока.
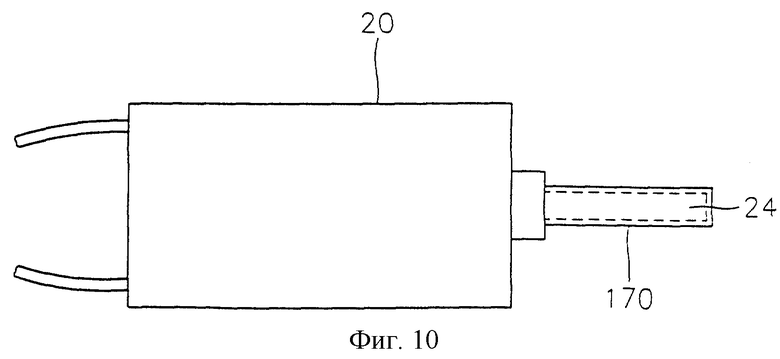
На фиг.10 показан вид сбоку двигателя, показанного на фиг.4а.
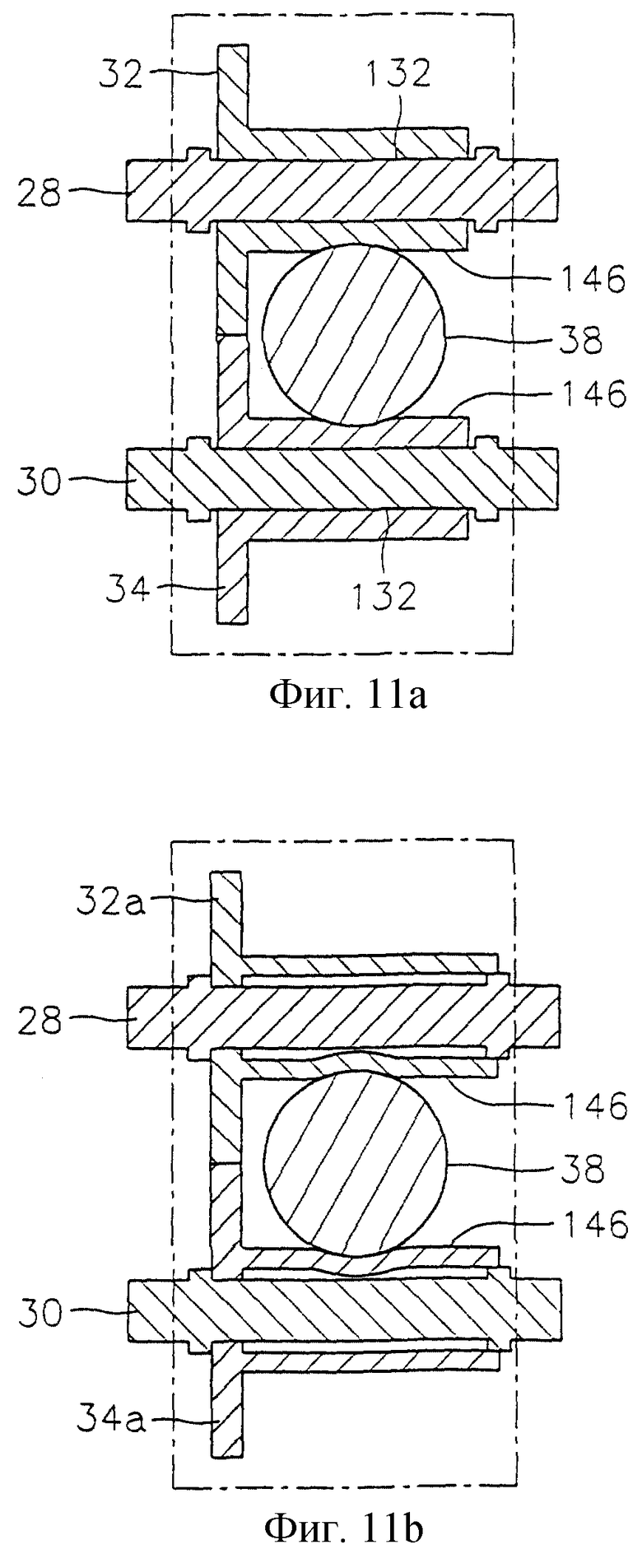
На фиг. 11a показано упрощенное сечение части, обозначенной на фиг.4а буквой "В", в случае использования устройства, показанного на фиг.7а.
На фиг. 11b показано упрощенное сечение части, обозначенной на фиг.4а буквой "В", в случае использования устройства, показанного на фиг.7b.
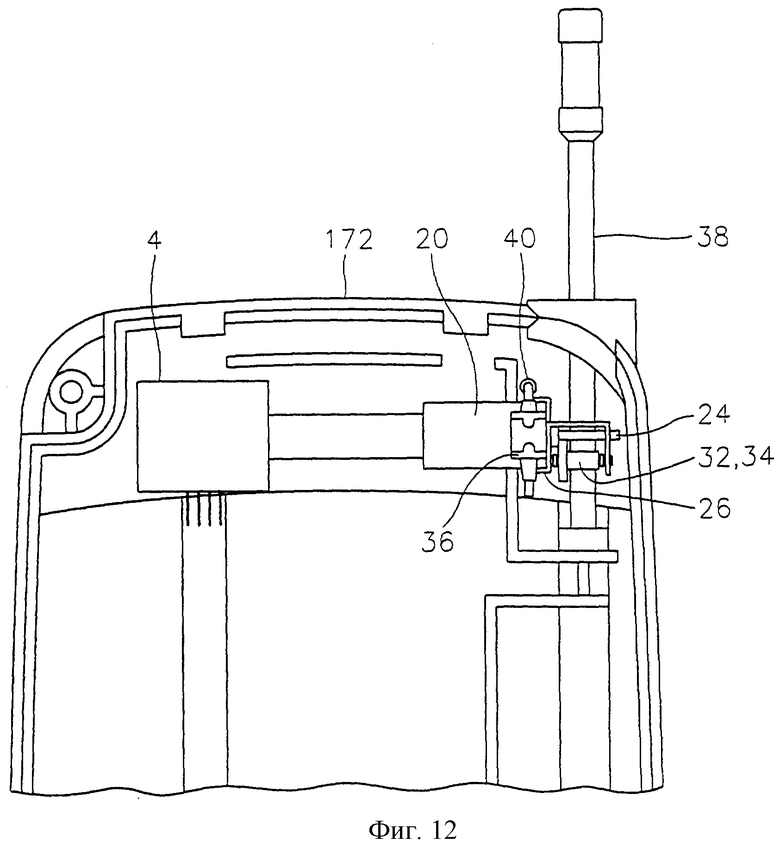
На фиг.12 показана компоновочная схема для случая, когда устройство автоматического выдвижения/втягивания антенны согласно настоящему изобретению устанавливается по существу на кожух антенны.
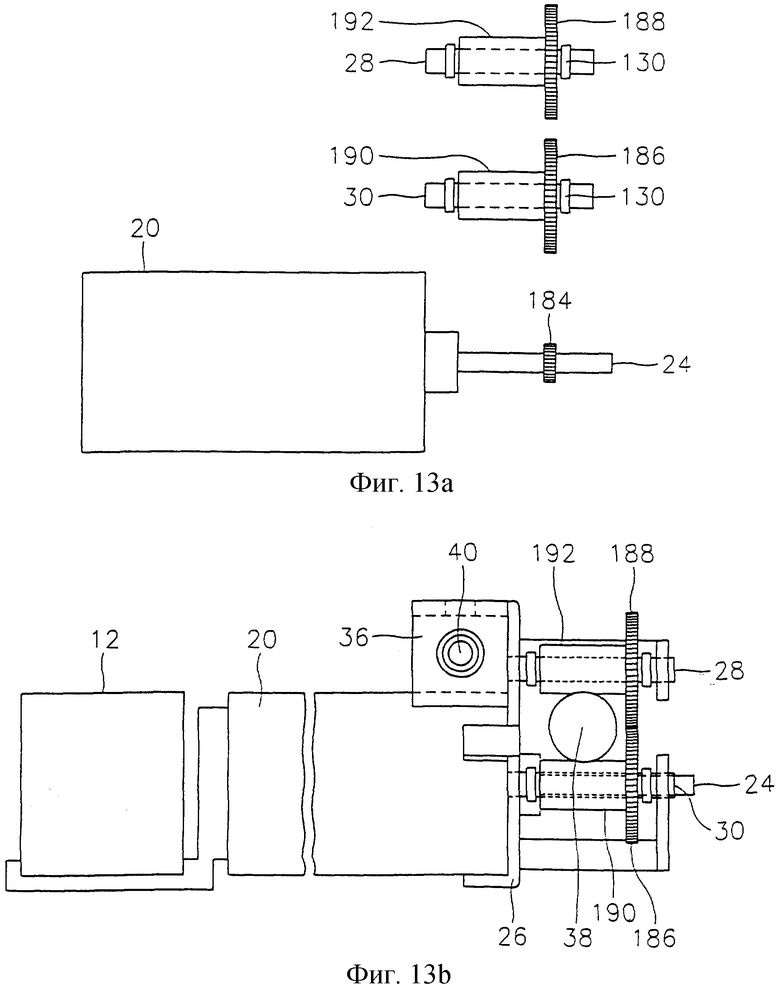
На фиг. 13а показаны некоторые измененные элементы в случае, когда используется механизм зубчатой передачи согласно второй форме осуществления настоящего изобретения.
На фиг. 13b показан вид сверху устройства автоматического выдвижения/втягивания антенны в случае, когда используются эти измененные элементы.
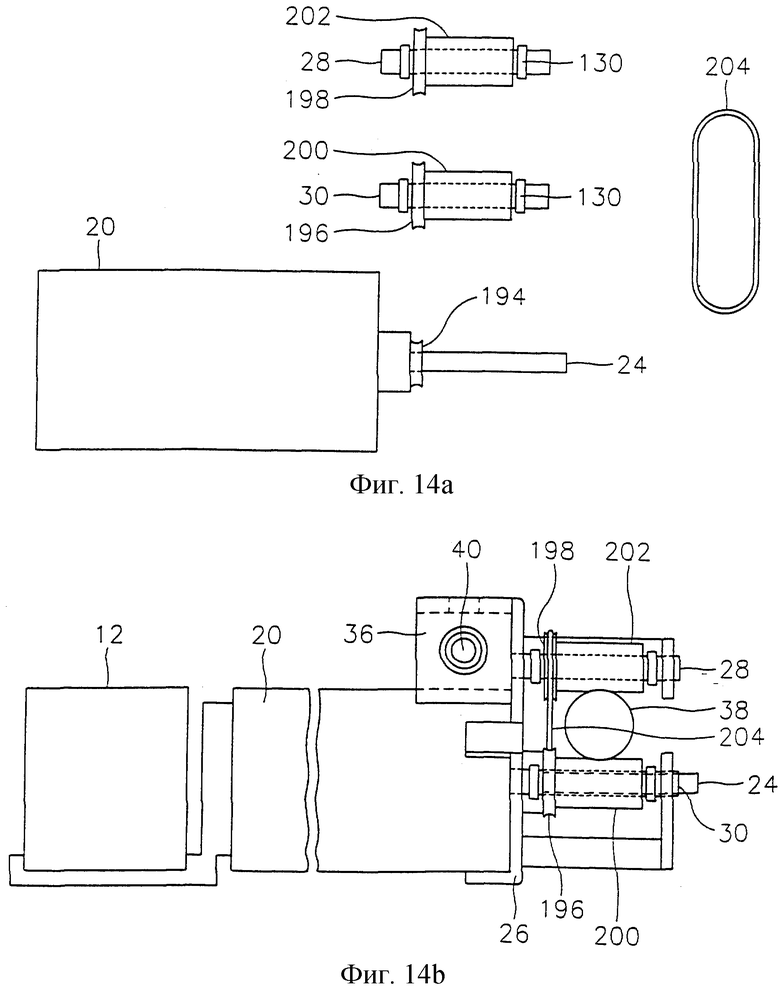
На фиг.14а показаны некоторые измененные элементы в случае, когда используется механизм ременной передачи согласно третьей форме осуществления настоящего изобретения.
На фиг. 14b показан вид сверху устройства автоматического выдвижения/втягивания антенны в случае, когда используются измененные элементы.
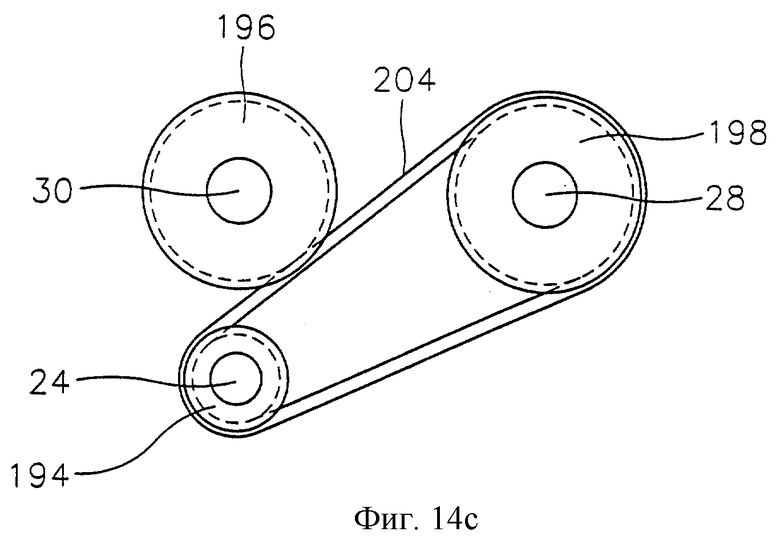
На фиг. 14с показан вид сбоку, когда ременная передача применяется для пары колес и вала двигателя.
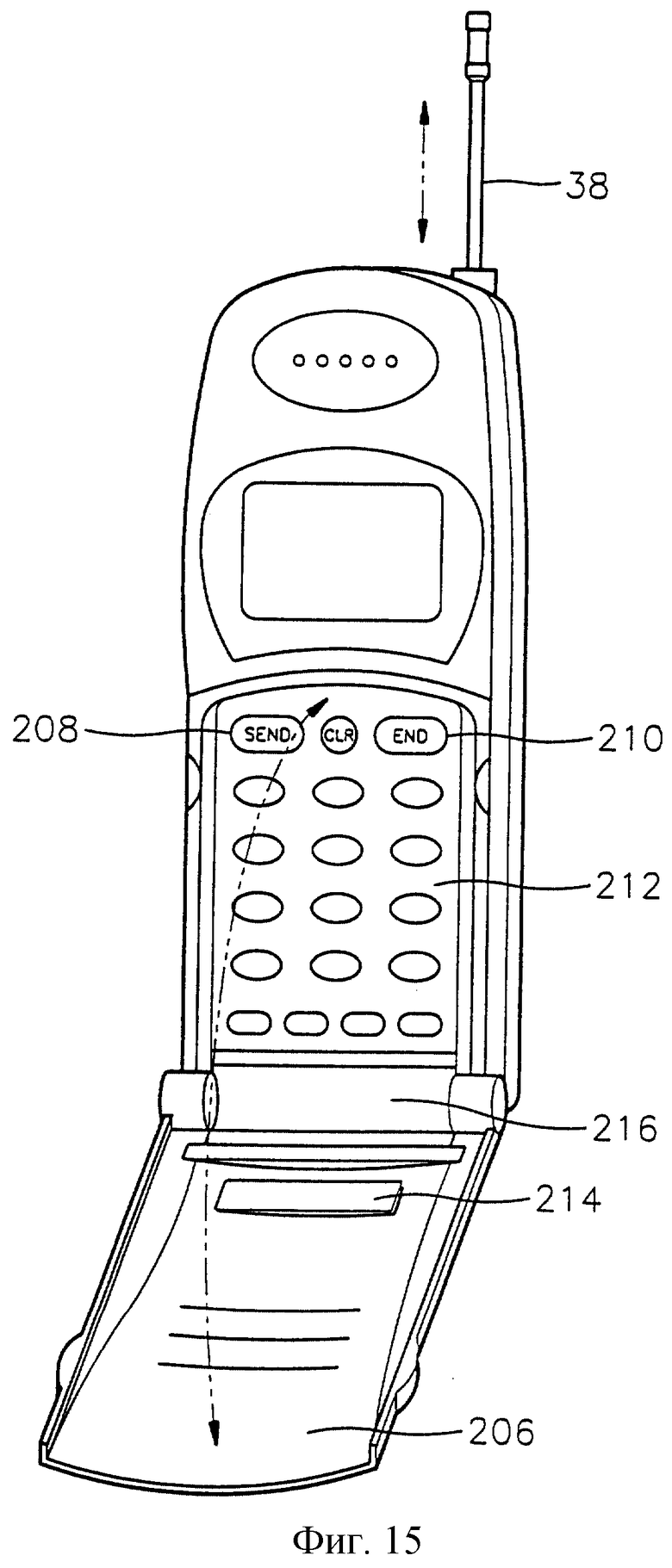
На фиг.15 показан внешний вид стандартного радиотелефона, в котором может быть применено устройство согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Ниже будет описана со ссылкой на прилагаемые чертежи первая предпочтительная форма осуществления устройства автоматического выдвижения/втягивания антенны согласно настоящему изобретению. Фиг.1 является блок-схемой, показывающей общую конструктивную концепцию устройства автоматического выдвижения и втягивания антенны согласно одной из форм осуществления настоящего изобретения. Устройство имеет передаточный блок 6 для выдвижения или втягивания антенны 38 из кожуха 172 или в кожух 172 антенны (фиг.12), узел 4 двигателя для передачи вращающего усилия на передаточный блок 6 и блок 2 управления для подачи управляющих сигналов на узел 4 двигателя после получения мощности привода от источника (Vcc) электропитания для управления направлением вращения двигателя и для обработки сбоев, которые могут произойти при работе антенны.
В настоящее время некоторые стандартные радиотелефоны, как показано на фиг. 15, имеют на панели 212 управления ключ (клавишу) "SEND" или "TALK" и ключ (клавишу) "END" или "OFF", чтобы подавать команду начала сеанса связи и конца сеанса связи соответственно, а некоторые другие имеют, кроме того, откидывающуюся переднюю крышку 206 для закрывания панели 212 управления. Для удобства эксплуатации устройство автоматического выдвижения/втягивания антенны согласно настоящему изобретению предпочтительно использует автоматическое распознавание открывания и/или закрывания передней откидывающейся крышки 206, для получения сигнала перемещения антенны и тем самым перемещения антенны или, для применения в радиотелефоне без передней откидывающейся крышки, использует такой способ, как получение сигнала от клавиши 208 "SEND" и/или клавиши 210 "END" в качестве сигнала управления приводом антенны.
Как показано на фиг.2, которая изображает одну из форм осуществления показанного на фиг.1 блока управления, блок 2 управления содержит схему 10 источника электропитания, микропроцессор 12, схему 14 обнаружения тока перегрузки, схему 16 сброса и схему 18 тактового сигнала.
Схема 10 источника электропитания содержит источник питания Vcc, стабилитрон D1, подключенный к источнику питания Vcc, для создания постоянного напряжения и резистор R4, подключенный к стабилитрону D1, для того чтобы снабжать микропроцессор 12 необходимой электрической энергией и управлять узлом 4 двигателя.
Микропроцессор 12 подключен к схеме 10 источника электропитания, схеме 14 обнаружения тока перегрузки, схеме 16 сброса и схеме 18 тактового сигнала и имеет входную клемму RTCC для приема сигнала переключения от выключателя SW1 или 216 на фиг.15, магнитно связанного с магнитом 214, встроенным в переднюю крышку 206 радиотелефона, или в радиотелефоне без передней откидывающейся крышки имеет вспомогательные клеммы RA2 и RA3 для получения сигнала начала сеанса связи и сигнала конца связи соответственно. Микропроцессор 12 выполняет встроенную программу для управления операциями автоматического выдвижения/втягивания антенны. Подробное описание выполнения программы будет дано вместе с описанием блок-схемы программы, показанной на фиг.3.
Схема 14 обнаружения тока перегрузки имеет транзистор Q1 и резистор R5, подключенный к нему последовательно. Что касается транзистора Q1, то его коллектор и база подключены к выводам резистора R4 соответственно, а эмиттер подключен к микропроцессору 12. Резистор R5 заземлен одним своим выводом и подключен к эмиттеру транзистора Q1 и микропроцессору 12 другим своим выводом. Если возникает неисправность, например, абонент зажимает антенну во время перемещения антенны или внешний предмет мешает работе двигателя, перемещающего антенну, то узел 4 двигателя перегружается и чрезмерно снабжается током, чтобы создать больший вращающий момент, и вследствие этого на резисторе R4 возникает большое падение напряжения. В то же самое время ток эмиттера транзистора Q1, подаваемый на микропроцессор 12, также возрастает и в результате микропроцессор 12, обнаруживая, что ток выше заданной величины, получает информацию, что узел 4 двигателя перегружается.
Схема 16 сброса содержит резистор R1 и конденсатор С1, причем резистор R1 подключен к выходной клемме схемы 10 источника электропитания, а оба вывода конденсатора С1 подключены к микропроцессору 12. Когда необходимо, эта схема сбрасывает микропроцессор 12.
Схема 18 тактового сигнала содержит резистор R3, у которого один вывод подключен к резистору R4, а другой - к микропроцессору 12, и конденсатор С2, у которого один вывод подключен к резистору R3, а другой заземлен. Эта схема формирует тактовые сигналы, необходимые микропроцессору 12.
Размеры схемы 2 управления минимизированы путем размещения элементов на обеих сторонах печатной платы сверхтонкого типа, тем самым может быть упрощен монтаж схемы 2 управления в пространстве в верхней части кожуха 172 антенны стандартного радиотелефона. Кроме того, выполняя схему 2 управления в виде цифровой схемы с микропроцессором в качестве главного устройства, можно уменьшить разряд батареи, подавая микропроцессором 12 сигнал управления на узел 4 прерывисто с установленными интервалами, например каждые несколько миллисекунд или около того, и тем самым избежать необходимости частой замены или зарядки батареи.
Фиг. 3 является блок-схемой алгоритма способа управления автоматическим выдвижением/втягиванием антенны, осуществляемого устройством 2 управления, показанным на фиг. 1. Объяснение способа управления с помощью устройства 2 управления будет дано со ссылкой на фиг.2 и 3.
Выполнение встроенной программы в микропроцессоре 12 начинается подачей питания или сигнала запуска от имеющейся в нем дежурной схемы (шаг S10). Чтобы уменьшать разряд батареи, после подачи питания все порты микропроцессора 12 устанавливаются в режим ввода (шаг S12).
В режиме ввода или после получения сигнала запуска от дежурной схемы микропроцессор 12 получает через входную клемму RTCC информацию о начале сеанса связи или о конце сеанса связи из сигнала ON/OFF или от переключателя SW1, который переключается при операции открывания/закрывания передней откидывающейся крышки 206. Эта информация касается пуска или остановки двигателя и направления вращения двигателя. На основании полученной информации принимается решение, должна ли антенна выдвигаться из кожуха или втягиваться в кожух 172 антенны. В случае радиотелефона, в котором передняя откидывающаяся крышка не используется, в качестве источника сигнала управления приводом антенны могут быть использованы клавиша 208 "SEND" и клавиша 210 "END", которые указывают начало сеанса связи или конец сеанса связи (шаг S14).
Затем, на основании полученной информации для управления двигателем, подается команда выдвижения антенны или команда втягивания антенны и, чтобы управлять двигателем, микропроцессор 12 подает сигнал управления двигателем первой полярности или полярности, обратной первой, на узел 4 двигателя через выходные клеммы RBO-RB7 микропроцессора 12 в течение предварительно установленного времени "Tset", необходимого для полного выдвижения или втягивания антенны (шаг S16).
Здесь предварительно установленное время "Tset" является экспериментальной величиной, изменяемой в соответствии с параметрами привода, например длиной антенны, передаточным числом передачи и скоростью вращения двигателя. Чтобы уменьшать разряд батареи, подача и прерывание сигнала управления приводом двигателя непрерывно повторяется через предварительно заданное время "Tint". Значения "Tset" и "Tint" являются переменными во встроенной программе микропроцессора 12.
Когда двигатель вращается, эффективное время вращения двигателя подсчитывается с накоплением (шаг S22) и это накопленное время вращения двигателя "Tdrv" сравнивается с заранее установленным временем "Tset" (шаг S18).
Когда вышеуказанное сравнение определяет, что время вращения двигателя "Tdrv" меньше, чем заранее заданное время "Tset", что означает, что антенна выдвигается или втягивается не полностью, выполняется проверка перегрузки двигателя из-за внешнего мешающего усилия (шаг S20). В данном случае проверка перегрузки двигателя выполняется путем проверки выходного сигнала от схемы 14 обнаружения тока перегрузки, как описано выше.
Когда обнаруживается ток перегрузки, операция прерывания на заранее заданное время "Tdly" и продолжения подачи питания на двигатель 20 повторяется в пределах заранее заданного максимального числа раз "N" (шаг S24). Это повторение подачи и прерывания питания выполняется для того, чтобы предотвратить электрические повреждения, которые могут возникнуть в узле 4 двигателя и/или блоке 2 при продолжении подачи питания на узел 4 двигателя, несмотря на то, что он перегружен. Заданное время "Tdly" и заданное максимальное число раз "N" также могут изменяться в программе. Если перегрузка в узле 4 двигателя обнаруживается даже после максимального числа раз "N" подачи и прерывания питания, схема 2 управления управляет антенной 38 так, чтобы автоматически убрать антенну в кожух антенны и затем завершить подачу питания или сигнала управления двигателем на узел 4 двигателя. Другими словами, чтобы гарантировать долговечность и стабильность работы устройства, когда усилие сопротивления, которое создается и передается в узел 4 двигателя через антенну 38, если антенна 38 захватывается рукой абонента или блокируется препятствием, обнаруживается схемой 2 управления, схема 2 управления повторяет операцию пуска и остановки узла 4 двигателя в пределах заданного максимального числа раз N, но когда нормальное перемещение антенны непрерывно нарушается, несмотря на вышеуказанные регулярные попытки, антенна автоматически втягивается в кожух антенны и подача питания в двигатель заканчивается, чтобы предохранить двигатель, схему управления и/или передачи от электрических и/или механических повреждений.
Если из проверки на шаге 18 выясняется, что время вращения двигателя "Tdrv" становится равным заданному времени "Tset", что означает, что антенна полностью выдвигается или втягивается, подача питания на двигатель должна быть окончена для завершения движения антенны (шаг S26).
От окончания движения антенны до ввода команды выдвижения/втягивания антенны микропроцессор 12 устанавливается в режим энергосбережения ("сна"), чтобы сберечь энергию батареи (шаг S28). Когда микропроцессор 12 находится в режиме энергосбережения, можно избежать ненужных потерь мощности, так как в состоянии готовности находится только та часть микропроцессора 12, которая выполняет задачу получения информации об управлении антенной.
Далее будет дано описание механизма управления антенной в устройстве автоматического выдвижения/втягивания антенны согласно первой форме осуществления настоящего изобретения.
Двигатель 20, содержащий вал 24 двигателя, вращает вал 24 двигателя по часовой стрелке или против часовой стрелки в соответствии с полярностью сигнала управления, подаваемого из микропроцессора 12. Как показано на фиг. 10, вал 24 двигателя покрыт по своей внешней поверхности наружным слоем 170, сделанным из резины, чтобы повысить таким образом его силу трения и гибкость. В качестве двигателя 20 рекомендуется использовать малогабаритный двигатель постоянного тока с диаметром от 4ϕ до 6ϕ.
Передаточный блок 6, разъемно и плотно соединенный с двигателем 20, передает вращающее усилие от вала 24 двигателя на антенну 38 и тем самым выдвигает или втягивает антенну 38 из кожуха или в кожух 172 антенны. Далее будет приведено подробное описание деталей передаточного блока 6.
Корпус 26 передачи, как показано на фиг.4а, 4b и 5а-5с, содержит пластину основания 112, размеры которого достаточны, чтобы вместить верхнюю сторону двигателя 20, на которой установлен вал 24 двигателя. На поверхности основания 112 как одно целое с ним сформированы соединительные элементы, например соединительные выступы 100, 102 и 104, чтобы плотно соединять корпус 26 передачи с двигателем 20. Для крепления сформированы угловые кронштейны 106 и 108 для передаточных валов, они выступают из основания 112 в направлении, противоположном направлению соединительных выступов 100, 102 и 104, и изогнуты далее так, чтобы они были параллельными основанию 112. В центре основания 112 формируется отверстие 114 для вала 24 двигателя, а в основании 112 и кронштейнах 106 и 108 формируются две пары отверстий 116/118 и 120/122 соответственно, при этом каждая пара отверстий 116/118 и 120/122 расположена на одной оси. Кроме того, корпус 26 передачи дополнительно имеет крепежный кронштейн 110, который отходит в радиальном направлении от одного из краев и отогнут в том же направлении, что и соединительные выступы 100, 102 и 104, при этом на боках отогнутой части выполнены фиксирующие углубления 124 и 124' соответственно.
В передаточном блоке 6 предусмотрена пара передаточных валов, имеющих одинаковую конструкцию. Как показано на фиг.6, каждый из передаточных валов 28 и 30 имеет концевые части 136 и 138, вставленные в пару отверстий 116 и 118 соответственно и в другую пару отверстий 120 и 122 соответственно, имеет пару колец 130 и 134 для предохранения передаточных валов 28 и 30 от выскальзывания из корпуса 26 передачи и имеет участок 132, на который плотно насажены колеса 32 или 34.
Первое колесо 34 и второе колесо 32, как показано на фиг.7а, сформированы как единое целое с двумя частями: частью 144, контактирующей с колесом, , и частью 146, контактирующей с антенной. Часть 144, контактирующая с колесом, первого колеса 34, диаметр которой больше, чем диаметр части 146, контактирующей с антенной, сцеплена с валом 24 двигателя. Разность между диаметрами части 144 и части 146 должна быть такой, чтобы когда обе части 144 одной пары колес 32 и 34 плотно контактировали и вращались, антенна 38 могла плотно помещаться между частями 146 контакта с антенной первого колеса 34 и второго колеса 32, чтобы не иметь потерь при передаче движущей силы. С другой стороны, чтобы получить больший вращающий момент, который прикладывается с соответствующим передаточным числом от вала 24 двигателя, диаметр части 144, контактирующей с колесом, первого колеса 34 имеет величину, которая в заданное число раз больше, чем диаметр вала 24 двигателя. В центрах колес 32 и 34 вдоль их осей формируется посадочное отверстие 142. Колеса 32 и 34, как показано на фиг.11а, плотно соединены с наружными поверхностями 132 передаточных валов 28 и 30 соответственно.
С другой стороны, имеется другая форма исполнения колеса, у которой, как показано на фиг.7b, посадочное отверстие 148, сформированное вдоль оси части 146 контакта с антенной, имеет тот же диаметр, что и кольцо 134 передаточного вала 30, и предусмотрена полость между участком 132 соединения с колесом передаточного вала 30 и внутренней круговой поверхностью части 146 контакта с антенной колеса 32а. Использование этого колеса 32а, как показано на фиг.11а, позволяет перемещать антенну более стабильно и амортизировать толчки или вибрации более эффективно, поскольку контактная область части 146, которая непосредственно создает контакт с антенной 38, в этом случае шире.
Имеется также и третья форма выполнения колеса, показанная на фиг.7с, в которой поверхность контакта с антенной части 140 колеса 32b имеет выступы и выемки. Поверхность с выступами и выемками имеет преимущество в предохранении антенны 38 от отклонения от нормального пути перемещения.
Желательно, чтобы вышеуказанные колеса были сделаны из эластичного материала, например резины, чтобы увеличить силу трения и амортизировать толчки или вибрации, но выбор материала для этих колес не ограничен одной резиной.
Долговременное использование устройства привода антенны может вызвать искривление формы антенны из-за внешней силы, которая может мешать нормальному движению антенны. Кроме того, могут часто случаться вибрации из-за вращения двигателя или внешних толчков, передаваемых на антенну 38. Принимая во внимание эти факторы, имеется потребность в средствах амортизации ударов, которые могут уменьшить и поглотить внешнюю силу или вибрации, прикладываемые к двигателю 20 и корпусу 26 привода.
Для того, чтобы амортизировать толчки от внешней силы, передаваемые на двигатель 20 и передаточный блок 6 через антенну 38, амортизировать вибрации, создаваемые при вращении двигателя, и закрепить двигатель 20 и передаточный блок 6 в кожухе 172 антенны, дополнительно предусмотрены средства крепления, включающие элемент 36 амортизации толчков и крепежную шпильку 40, а также фиксирующий кронштейн 110. Элемент 36 амортизации толчков, как показано на фиг.4а, плотно вставлен между частью верхней периферийной поверхности двигателя и нижней поверхностью фиксирующего кронштейна 110 в корпусе 26 передачи.
Для плотного прилегания элемент 36 амортизации толчков, как показано на фиг.8а-8с, имеет круглое сечение в своем основании 150, выступающие элементы 154 и 156 с плотной посадкой вставляются в фиксирующие углубления 124 и 124', а в его центре формируется посадочное отверстие 152. Желательно, чтобы элемент 36 амортизации толчков, принимая во внимание его функцию, был сделан из эластичного материала, такого как, например, резина, чтобы поглощать и ослаблять внешние толчки, передаваемые через антенну 38, или амортизировать вибрации двигателя.
Как показано на фиг.9, крепежная шпилька 40 имеет форму верхнего правого угла прямоугольника и имеет на обеих концах соединительные части 168 и 170, вставляемые в соединительные углубления (не показанные), предусмотренные в заранее заданных местах кожуха 172 антенны, часть 160 плотно прилегает к поверхности посадочного отверстия 152, сформированного в элементе 36 амортизации ударов, а кольца 162, 164 и 166 служат для плотного соединения крепежной шпильки 40 с элементом 36 амортизации ударов.
Использование таких колес 32 и 34 и элемента 36 амортизации ударов, имеющего форму и материал, описанные выше, предохраняет антенну 38 от ненормального перемещения, вызванного изменениями или изгибом антенны, ориентированным перпендикулярно оси прямого перемещения антенны, амортизирует внешние толчки, предотвращая их передачу на двигатель 20 и корпус 26 передачи, и благодаря этому позволяет всегда выдвигать или втягивать антенну в наилучших условиях и значительно уменьшать шум и вибрации, создаваемые вращающимся двигателем.
В передаточном блоке 6, как указано выше и показано на фиг.4b, вращающий момент вала 24 двигателя передается с преобразованием в больший вращающий момент через первое колесо 34 с соответствующим передаточным числом. При этом первое колесо 34 вращается в направлении, противоположном направлению вращения вала 24 двигателя, а после получения вращающего момента от первого колеса 34 второе колесо 32 вращается в направлении, противоположном направлению вращения первого колеса 34. Таким образом, антенна 38 вертикально выдвигается или втягивается вращением со сцеплением одной пары колес 32 и 34, направления вращения которых противоположны друг другу.
Ниже будет описано устройство автоматического выдвижения и втягивания антенны согласно другим формам осуществления настоящего изобретения.
На фиг. 13а и 13b показано устройство автоматического выдвижения и втягивания антенны согласно второй форме осуществления настоящего изобретения в случае, когда используется зубчатая передача.
Здесь краткое описание будет дано только для элементов, отличных от элементов в описанной выше первой форме осуществления. Как показано на вышеуказанных чертежах, первое зубчатое колесо 184 соединено в заранее определенной позиции с валом 24 двигателя, а пара зубчатых колес 186 и 188 соединена с передаточными валами 28 и 30 соответственно за первыми кольцами 130. Каждое из второго зубчатого колеса 186 и третьего зубчатого колеса 188 имеет наружный диаметр, который в заданное число раз больше, чем диаметр первого зубчатого колеса 184, чтобы создавать больший вращающий момент с передаточным числом относительно первого зубчатого колеса 184. Пара колес 190 и 192 имеет цилиндрическую форму с посадочными отверстиями, сформированными вдоль их осей, в которые вставляются части 132 передаточных валов 28 или 30, для плотного соединения с колесами 190 и 192. Желательно, чтобы колеса 190 и 192 были сделаны из эластичного материала, например из резины. Наружный диаметр колес 190 и 192 равен диаметру части 146 контакта с антенной колеса 32. Когда первый передаточный вал 30, соединенный со вторым зубчатым колесом 186 и первым колесом 190, и второй передаточный вал 28, соединенный с третьим зубчатым колесом 188 и первым колесом 192, оба устанавливаются в корпусе 26 передачи, зубчатое колесо 186 первого передаточного вала 30 входит в зацепление с зубчатым колесом 188 второго передаточного вала 28 и как первое колесо 190, так и второе колесо 192 плотно сцепляются с антенной 38.
На фиг. 14а-14 показано устройство автоматического выдвижения и втягивания антенны согласно третьей форме осуществления настоящего изобретения, в случае, когда используется передача с ременным приводом.
Здесь краткое описание будет дано только для элементов, отличных от элементов в вышеописанной первой форме осуществления. Как показано на вышеуказанных чертежах, в передаче этого вида приводное усилие передается через приводной ремень 204. Первый ременный шкив 194 предусматривается в заранее определенном месте вала 24 двигателя, а второй ременный шкив 196 и третий ременный шкив 198 предусмотрены просто за кольцами 130 передаточных валов 28 и 30 соответственно. Каждый из шкивов 196 и 198 имеет диаметр, который в заданное число раз больше, чем диаметр первого ременного шкива 194, чтобы получить больший вращающий момент с передаточным числом относительно первого ременного шкива 194. Первое колесо 200 и второе колесо 202 имеют цилиндрическую форму с посадочными отверстиями, сформированными вдоль их осей, в которые вставляются части 132 передаточных валов 28 или 30, чтобы быть плотно соединенными с колесами 200 и 202. Каждый наружный диаметр колес 200 и 202 равняется диаметру части 146 контакта с антенной колеса 32. Желательно, чтобы колеса 190 и 192 были изготовлены из эластичного материала, такого как резина. Когда первый передаточный вал 30 и второй передаточный вал 28 устанавливаются в корпусе 26 передачи, как первое колесо 200, так и второе колесо 202 плотно сцепляются с антенной 38. Как показано на фиг.14с, приводной ремень 204 натянут вокруг трех ременных шкивов 194, 196 и 198 так, что первый передаточный вал 30 может вращаться в направлении, противоположном направлению вращения вала 24 двигателя, а второй передаточный вал 28 может вращаться в том же направлении, что и направление вращения вала 24 двигателя, и антенна 38 вертикально перемещается вращающим усилием, создаваемым двигателем 20 и передаваемым на первый передаточный вал 30 и второй передаточный вал 28 ремнем 204.
Хотя настоящее изобретение было описано со ссылкой на его частные варианты осуществления, оно не ограничено портативными телефонами или радиотелефонами, а применимо к любому другому радиопередатчику/приемнику или портативному электронному изделию, которые имеют антенну. Специалистам ясно, что различные изменения в форме и деталях могут быть выполнены в пределах сущности изобретения и его объема, определяемых приложенной формулой изобретения.
Изобретение относится к приводу антенны. Техническим результатом является создание автоматического привода при минимизации потребления энергии и малых габаритах, защита от повреждений. В соответствии с предлагаемым изобретением при открывании или закрывании передней откидывающейся крышки, либо при нажатии клавиши начала или конца сеанса связи, устройство управления получает информацию о выдвижении или втягивании антенны и управляет двигателем с помощью прерывистой подачи сигнала управления двигателем, благодаря которому двигатель может вращаться по часовой стрелке или против часовой стрелки в течение заданного времени, необходимого для полного выдвижения или втягивания антенны. Если во время вращения двигателя к антенне прикладывается блокирующая сила, устройство управления многократно прерывает подачу сигнала управления на двигатель на заранее заданный интервал времени и затем возобновляет подачу сигнала. Передаточный блок, плотно соединенный в одно целое с двигателем, получает вращающее усилие от вала двигателя и выдвигает или втягивает антенну. Кроме того, для крепления двигателя и передаточного блока к кожуху антенны дополнительно предусмотрен крепежный элемент, который может амортизировать вибрации двигателя и внешние толчки, передаваемые на двигатель и передаточный блок через антенну. 3 с. и 25 з.п.ф-лы, 15 ил.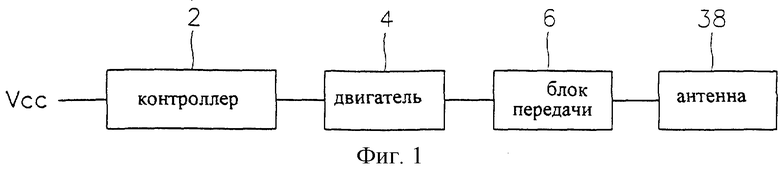
| US 5497506 А, 05.03.1996 | |||
| US 5642123 А, 24.06.1997 | |||
| US 4649398 А, 10.03.1987 | |||
| US 4730152 А, 08.03.1988 | |||
| US 4303872 А, 01.12.1981 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| ВЫДВИЖНАЯ АНТЕННА ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2115200C1 |

