Область техники, к которой относится изобретение
Изобретение в общем относится к области беспроводной связи, а более конкретно - к устройству и способу определения местоположения подвижной станции (ПС), работающей в системе подвижной связи.
Уровень техники
ФКС (Федеральный комитет связи) США предусматривает, чтобы услуга определения местоположения ПС выполнялась службой спасения 911 (Е911) с вероятностью 67% и ошибкой в пределах 125 м или менее до октября 2001 года. Поэтому стандарт (TIA/EIA/IS-95) МДКР (множественный доступ с кодовым разделением каналов), а также система IMT-2000 (Международная система подвижной связи 2000) предпринимает усилия для обеспечения услуги определения местоположения ПС с использованием функции обратной линии связи, которая называется ФВП (функция включения питания). ФВП является процедурой определения местоположения ПС, в которой ПС в чрезвычайной ситуации передает зондирующие сигналы с постепенным увеличением мощности в множество соседних базовых станций (ВС) по обратному каналу для передачи информации им о своем местоположении для того, чтобы каждая ВС могла вычислить расстояние между ВС и ПС путем оценки времени прихода сигнала, который достигает ВС. ФВП обеспечивается в стандарте IS-95B.
Реализация ФВП, однако, увеличивает интерференцию и как результат снижает эксплуатационные параметры системы. Для решения проблемы настоящее изобретение предлагает способ определения местоположения ПС для непрерывного позиционирования. Схема определения местоположения ПС работает по принципу: ПС принимает активный пилот-сигнал и другие соседние пилот-сигналы по каналу прямой линии связи и оценивает свое местоположение относительно соседней БС, работающей в системе связи МДКР. Кроме того, относительное положение ПС по меньшей мере от трех БС определяют с использованием по меньшей мере двух значений разности времени поступления (РВП) сигналов, принимаемых от БС. В настоящем изобретении РВП и ОСШ (отношение сигнал/шум) каждого канала БС измеряют для эффективного определения местоположения ПС в системе связи МДКР, синхронизированной с ГСП (глобальной системой позиционирования).
Сущность изобретения
Поэтому задачей настоящего изобретения является создание устройства и способа определения местоположения ПС путем измерения РВП и ОСШ прямых пилот-сигналов, которые поступают от соседних БС, в системе подвижной связи, которая работает при синхронизации.
Другая задача настоящего изобретения заключается в создании устройства и способа определения местоположения ПС с использованием назначенного поискового устройства в системе подвижной связи.
Вкратце, эти и другие задачи можно решить путем создания устройства для ПС для определения местоположения ПС. ПС принимает сигналы, синхронизированные с заданным временем по меньшей мере от трех соседних БС и определяет местоположение по меньшей мере трех БС в служебной БС. В устройстве для определения местоположения ПС аналого-цифровой преобразователь (АЦП) преобразует принятые сигналы от БС в цифровые данные выборок элементарного сигнала, память сохраняет данные выборок, назначенное поисковое устройство обнаруживает по меньшей мере два сигнала путем корреляции данных выборок элементарного сигнала, полученных из памяти с помощью автономной обработки и вычисляет отношения сигнал/шум (ОСШ) и разность времени поступления (РВП) двух сигналов, а устройство контроллера управляет назначенным поисковым устройством для получения наилучшей оценки ОСШ и РВП.
Краткое описание чертежей
Сущность изобретения иллюстрируется ссылкой на сопроводительные чертежи, на которых:
фиг. 1 изображает шестиугольные сотовые ячейки, среди которых служебная БС расположена в центре и окружена шестью БС;
фиг. 2А изображает блок-схему приемника ПС, имеющего назначенное поисковое устройство для позиционирования ПС, согласно первому варианту осуществления настоящего изобретения;
фиг. 2В изображает блок-схему приемника ПС, имеющего назначенное поисковое устройство для позиционирования ПС, согласно второму варианту осуществления настоящего изобретения;
фиг. 3А изображает блок-схему приемника ПС, имеющего назначенное поисковое устройство для позиционирования ПС, согласно третьему варианту осуществления настоящего изобретения;
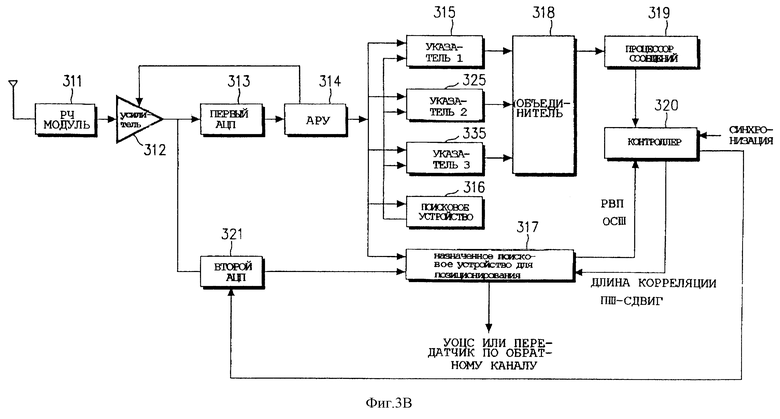
фиг. 3В изображает блок-схему приемника ПС, дополнительно содержащего второй АЦП 321 помимо элементов, показанных на фиг.3А, согласно четвертому варианту осуществления настоящего изобретения;
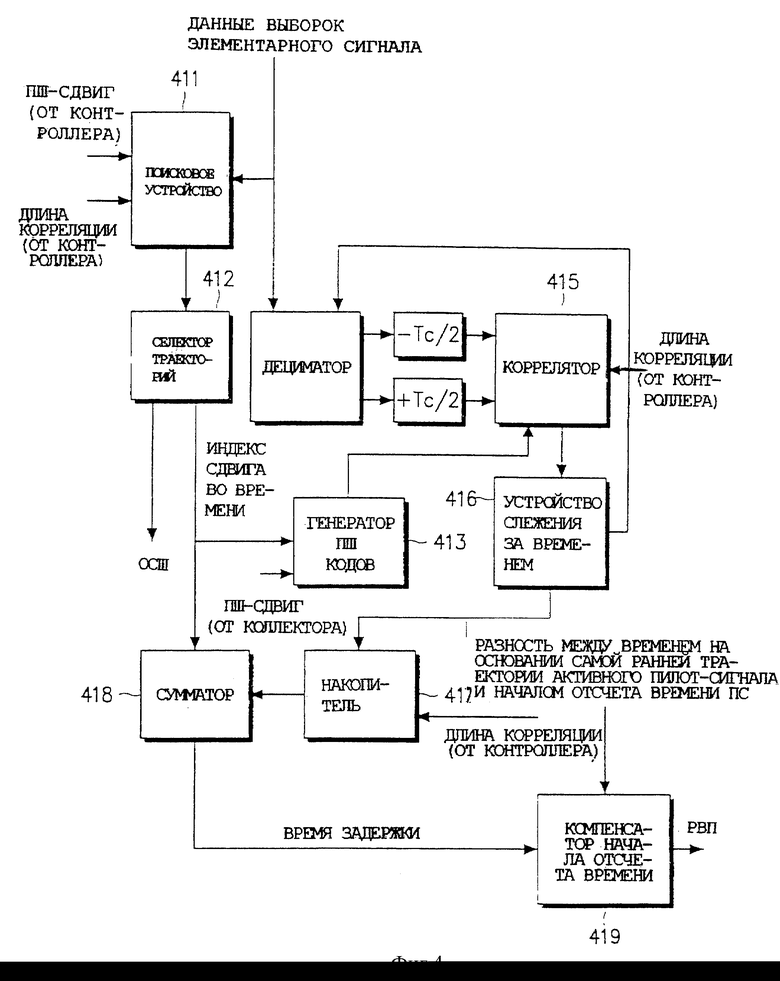
фиг. 4 изображает блок-схему назначенного поискового устройства для ПС, который сконструирован с возможностью работы как в качестве поискового устройства, так и устройства слежения за временем для точного измерения РВП, согласно варианту осуществления настоящего изобретения;
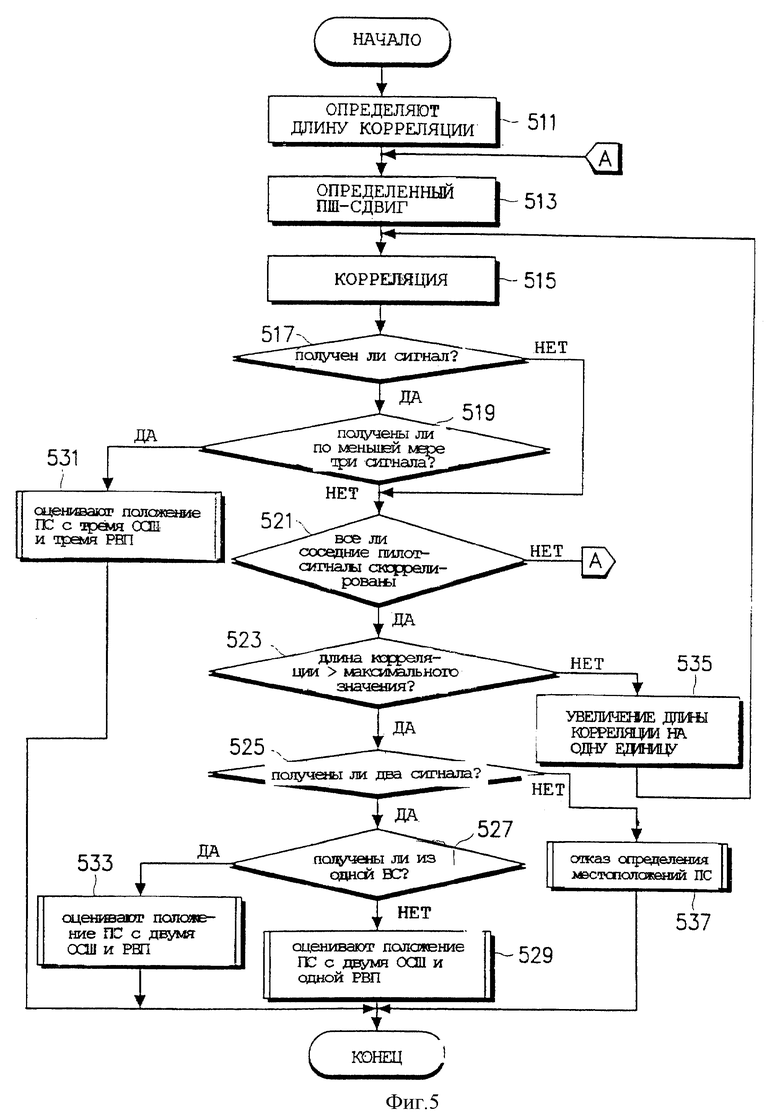
фиг.5 изображает алгоритм, показывающий операцию управления определением местоположения ПС в случае, если назначенное поисковое устройство получает РВП и ОСШ, согласно варианту осуществления настоящего изобретения;
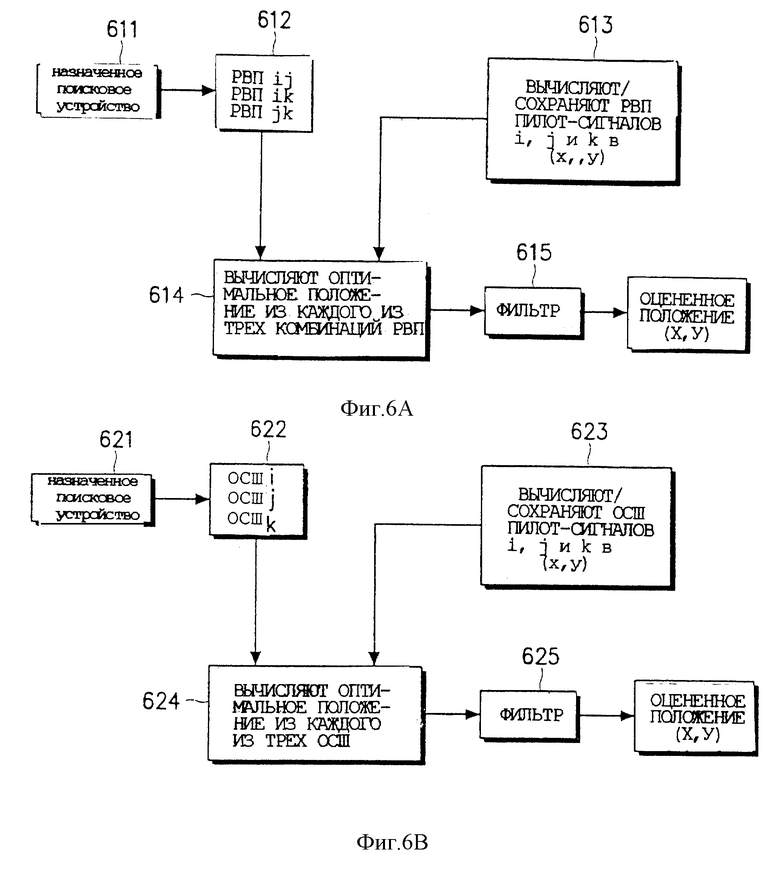
фиг. 6А и 6В изображают блок-схемы алгоритма определения местоположения ПС в случае, если получены три пилот-сигнала с ОСШ выше, чем порог ОСШ, согласно варианту осуществления настоящего изобретения;
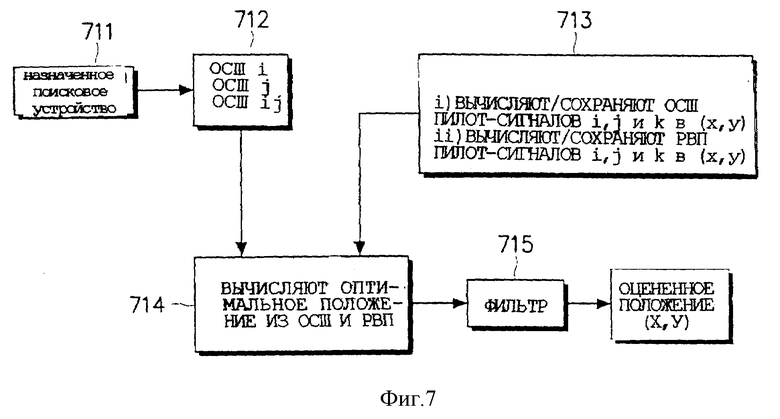
фиг. 7 изображает блок-схему алгоритма определения местоположения ПС в случае, если получены два пилот-сигнала с ОСШ выше, чем порог ОСШ, от одной БС согласно варианту осуществления настоящего изобретения; и
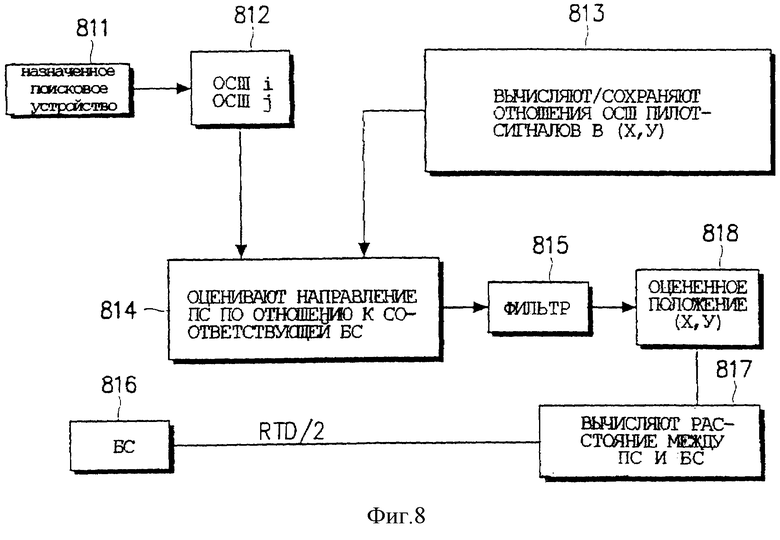
фиг. 8 изображает блок-схему алгоритма определения местоположения ПС с использованием ОСШ и ЗПС (задержка при прохождении сигнала в прямом и обратном направлении), измеренной ВС, двух пилот-сигналов, если два пилот-сигнала получены от БС согласно варианту осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления
Ниже описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на сопроводительные чертежи. В следующем ниже описании хорошо известные функции или конструкции не описываются подробно, поскольку они приводят к усложнению изобретения излишними подробностями.
Хотя в следующем ниже описании настоящего изобретения проведена оценка того, что прямой канал пилот-сигнала описывается как средство для измерения расстояния между БС и ПС, оно является образцовым вариантом осуществления. Очевидно, что каналы, совместно используемые всеми или некоторыми ПС, являются кандидатами, такими как вспомогательный канал пилот-сигнала, канал синхронизации и канал поискового вызова, обеспечиваемыми в настоящей системе IS-95.
Концепция варианта осуществления настоящего изобретения заключается в том, что при определении местоположения ПС используются оптимальные незакодированные данные прямого канала пилот-сигнала, относящиеся к временным и фазовым характеристикам. Способ определения местоположения ПС согласно варианту осуществления настоящего изобретения применяется для позиционирования при необходимости и непрерывного позиционирования. Местоположение ПС можно определить в случае, если ПС или БС производит запрос. Кроме того, система и ПС могут поддерживать это для навигационной службы. Сотовые ячейки правильной шестиугольной формы приведены в качестве географической модели ПС-БС с одной служебной БС, в данном случае БС-1, которая окружена шестью БС (фиг. 1).
Чтобы определить ее местоположение, ПС должна принимать пилот-сигналы с измеряемыми ОСШ от множества БС, включая служебную БС, БС1. Кроме того, если ПС находится рядом со служебной БС или другой БС, ПС не может принимать пилот-сигналы с достаточными ОСШ от других БС, так как сигнал, передаваемый расположенной рядом БС, интерферируют с пилот-сигналами от других БС. ОСШ прямого пилот-сигнала Р1, который принимают в ПС на определенном расстоянии от БС1, обычно выражается в виде
где β - отношение мощности передачи пилот-сигнала к полной мощности передачи БС1, p1 - полная мощность передачи БС1 в прямом направлении, pi - мощность передачи БCi в прямом направлении, di - расстояние между ПС и БCi, которое обычно выражается как L(di)=С•di -4, и С - постоянная величина. ОСШ пилот-сигналов с pi (i=1, 2, 3,...), которые принимают в ПС в определенном местоположении, можно оценить из уравнения (1). С другой стороны, ОСШ каждого пилот-сигнала в каждом местоположении на поверхности земли можно оценить для ПС в определенном местоположении с использованием ОСШ и информации о местоположении соседних БС, ПШ-сдвига, направления и угла каждого сектора и географических факторов затухания сигналов. Местоположение ПС можно определить путем сравнения оценочных ОСШ с ОСШ, фактически измеренными с помощью ПС.
Ниже подробно описывается способ определения местоположения ПС с использованием ОСШ.
ПС вычисляет РВП и ОСШ каждого пилот-сигнала, принятого в момент времени, когда необходимо определить местоположение ПС. В этому случае РВП определяется как разность между значениями времени поступления двух синхронизированных с БС сигналов (например, пилот-сигналов) в конкретной ПС. РВП прямого пилот-сигнала и ОСШ измеряют с помощью поискового устройства, который имеется в настоящей ПС МДКР IS-95. Однако, так как поисковое устройство ПС МДКР IS-95 может измерять РВП и ОСШ одного пилот-сигнала в один момент времени, начало отсчета времени может изменяться из-за изменения траектории распространения радиосигнала активного пилот-сигнала, который обеспечивает передачу начала отсчета времени в ПС при попытке измерить их у следующего пилот-сигнала.
Для устранения полученной в результате погрешности измерения РВП ПС сохраняет все принятые сигналы и вычисляет РВП и ОСШ каждого пилот-сигнала с помощью автономной обработки в варианте осуществления настоящего изобретения. Местоположение ПС можно определить в основном с помощью по меньшей мере трех сигналов БС. Ниже описывается получение по меньшей мере трех сигналов БС при автономной обработке в ПС, имеющей назначенное поисковое устройство.
В приемнике ПС, показанном на фиг.2А, выходной сигнал АРУ (схема автоматической регулировки усиления) 214 сохраняется во временной памяти 218, и назначенное поисковое устройство 220 производит вычисление значений РВП и ОСШ из сохраненных данных с помощью автономной обработки. Для непрерывного позиционирования в варианте осуществления настоящего изобретения принятые данные выборок элементарного сигнала сохраняются во временной памяти, и значения РВП и ОСШ непрерывно вычисляются из данных выборок элементарного сигнала. Присвоение назначенного поискового устройства подразумевает, что кроме поискового устройства, поддерживающего рейк-приемник ("приемник с определением направления прихода сигнала"), который используется в существующей ПС IS-95, можно добавить другое поисковое устройство для услуги позиционирования ПС. Интегральное время коррекции (здесь и ниже называется длиной корреляции) для позиционирования ПС в назначенном поисковом устройстве 220 настраивается на установленное значение под управлением контроллера 219 для обнаружения фазы соответствующего пилот-сигнала и вычисления его РВП в назначенном поисковом устройстве 220. Для того чтобы выполнить это, назначенное поисковое устройство 220 увеличивает длину корреляции в зоне с сильной интерференцией, таким образом обнаруживая даже фазу пилот-сигнала с низким ОСШ. То есть увеличение длины корреляции дает возможность обнаружить фазу пилот-сигнала с низким ОСШ или пилот-сигнала, подверженного слишком сильной интерференции.
Способ определения местоположения ПС из трех измеренных РВП уже существует в математическом "решении в конечном виде". Местоположение ПС, определенное с помощью этого механизма, однако, может быть неточным, так как пилот-сигнал (пилот-сигналы) БС (множества БС) достигает ПС по многочисленным траекториям. Распространение по многочисленным траекториям (многолучевое распространение) создает серьезную ошибку при позиционировании ПС. Ошибку задержки распространения по многочисленным траекториям трудно скомпенсировать и оценить, так как эти ошибки задержки входят в определение местоположения в вышеуказанной схеме вычисления с использованием РВП. Кроме того, позиционирование ПС имеет составляющие непрерывной ошибки из-за прерывистого, мгновенного или непрерывного приема составляющей сигнала, распространяющегося по многочисленным траекториям. Поэтому в варианте осуществления настоящего изобретения используется ОСШ пилот-сигнала для увеличения надежности позиционирования ПС на основе РВП. Теоретически ОСШ пилот-сигнала, который передается от каждой БС, изменяется в зависимости от местоположения ПС и представляет собой одно фиксированное местоположение ПС, и, таким образом, местоположение ПС можно определить путем измерения значений ОСШ пилот-сигналов, которые передаются от множества БС.
В реальных условиях ОСШ в определенном местоположении ПС не равно ни теоретическому значению ОСШ, ни постоянному значению. В способе определения местоположения ПС с использованием ОСШ согласно варианту осуществления настоящего изобретения ОСШ принятого пилот-сигнала фильтруется определенным фильтром (например, фильтром с усреднением, или фильтром, который устанавливает верхний или нижний предел), вычисляют расстояние между ПС и каждой БС, и оценивают местоположение ПС на основании ОСШ и расстояния. Затем местоположение ПС окончательно определяют путем сравнения местоположения ПС, которое оценивают по ОСШ (местоположение ОСШ) и по РВП (местоположение РВП). Следовательно, этот способ определения местоположения ПС на основе РВП становится надежным.
Способ определения местоположения ПС согласно варианту осуществления настоящего изобретения можно рассматривать в двух аспектах. Во-первых, для того чтобы определить местоположение РВП ПШ-сдвиг пилот-сигнала с ОСШ, большим, чем порог ОСШ, положение БС, передающей пилот-сигнал, и РВП пилот-сигнала получают и затем вычисляют относительное положение ПС по отношению к БС. С другой стороны, для создания устойчивого позиционирования на основе ОСШ распределение ОСШ пилот-сигнала с ОСШ, большим, чем порог ОСШ, который направляется из БС, необходимо обнаруживать с использованием всех факторов за исключением замирания, которое изменяет ОСШ пилот-сигнала, включая ПШ-сдвиг и РВП пилот-сигнала, положение и высоту антенны БС, направление и ширину луча секторной антенны в случае секторной антенны и географическую информацию об ослаблении сигнала. В этом случае эффект замирания можно уменьшить путем усреднения в течение заданного периода времени. Затем расстояние между ПС и соответствующей БС вычисляют с использованием ОСШ пилот-сигнала в определенном положении, и относительные положения ПС по отношению к соседним БС определяют из вычисленного значения расстояния.
Окончательное положение ПС определяют из таким образом полученных местоположений РВП и ОСШ. Определить окончательное местоположение ПС можно с помощью различных алгоритмов:
(1) Окончательное положение ПС определяют с учетом среднего значения среднего местоположения ОСШ и среднего местоположения РВП.
(2) Окончательное местоположение ПС определяют с использованием обратной величины отклонения местоположений с РВП и с ОСШ в виде весовых коэффициентов для операций усреднения.
(3) Обратные значения стандартных отклонений заменяют на весовые значения в (2).
(4) Вычисляют разность между местоположением РВП и местоположением ОСШ, при этом величина, обратная разности, представлена как весовой коэффициент для среднего местоположения РВП и среднего местоположения ОСШ, таким образом, вычисляя окончательное положение.
В подходах (2), (3) и (4) маленький весовой коэффициент присваивается при вычислении окончательного положения, если два измеренных местоположения отличаются намного, и большой весовой коэффициент при вычислении окончательного положения, если они имеют приблизительно одинаковые значения.
Вариант осуществления настоящего изобретения в основном предусматривает способ определения местоположения ПС в случае, когда ПС измеряет значение уровня у трех различных пилот-сигналов БС. То есть ПС может принимать пилот-сигналы с достаточными значениями ОСШ и по меньшей мере из трех БС, что невозможно в многочисленных зонах. Поэтому вариант осуществления настоящего изобретения также предусматривает способ определения местоположения ПС, в котором положение ПС можно определить даже в самом худшем случае, при котором получают только два пилот-сигнала. Вероятные местоположения ПС, вычисленные из значений РВП, полученных с использованием двух различных измерений уровня пилот-сигналов БС из параболы между двумя БС. Значения ОСШ двух пилот-сигналов, которые измеряются с помощью ПС, различаются в любом местоположении на параболе. Следовательно, надежное положение с окончательным ОСШ получают с помощью фильтрации местоположений ОСШ, которые получаются в результате из двух ОСШ. Затем определяют местоположение ПС путем обнаружения местоположения на параболе, которая лучше всего согласована с окончательным местоположением ОСШ.
Когда БС передает два пилот-сигнала с ОСШ большими, чем порог ОСШ, РВП нельзя вычислить из двух пилот-сигналов. В этом случае ПС определяет местоположение с использованием ОСШ и задержек при прохождении сигнала в прямом и обратном направлении (ЗПС). То есть, если два пилот-сигнала принимают от той же самой БС, то подразумевается, что ПС находится внутри зоны пересечения секторов БС. Направление ПС из БС определяют из средних значений ОСШ двух пилот-сигналов. Затем определяют окончательное положение ПС с использованием направлений ПС и ЗПС.
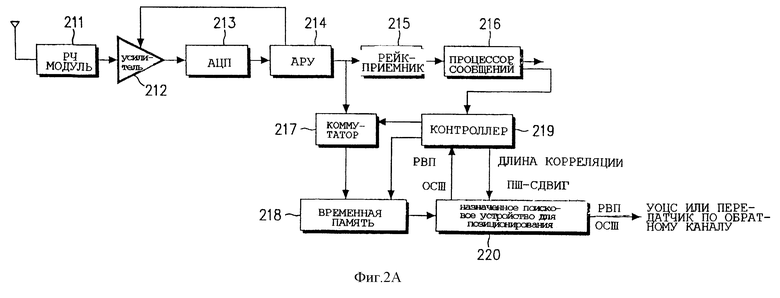
Фиг.2А изображает блок-схему приемника ПС согласно первому варианту осуществления настоящего изобретения для временного хранения данных прямого канала и определения положения ПС с использованием назначенного поискового устройства.
Как показано на фиг. 2А, РЧ (радиочастотный) модуль 211 преобразует с понижением частоты РЧ-сигнал, принятый антенной, в ПЧ (промежуточная частота) сигнал и затем преобразует ПЧ-сигнал в сигнал основной полосы частот. Усилитель 212 усиливает выходной сигнал РЧ-модуля 211, при этом динамический диапазон должен быть подходящим для АЦП (аналого-цифровой преобразователь) 213 под управлением АРУ 214. АЦП 213 преобразует выходной сигнал усилителя 212 в цифровой сигнал путем дискретизации и квантования. Выходные данные АЦП 213 являются данными выборок элементарного сигнала. АРУ 214 регулирует усиление усилителя 212 для поддержания диапазона выходного сигнала усилителя 212 на заданном уровне. Рейк-приемник 215 сжимает по спектру сигналы многолучевого распространения, принятые из АРУ 214, и комбинирует сжатые по спектру сигналы. Процессор 216 сообщений декодирует выходной сигнал рейк-приемника 215 для восстановления первоначального сигнала. В этом случае управляющие данные поступают в контроллер 219. Контроллер 219 обрабатывает восстановленные данные сообщения, принятые из процессора 216 сообщений, и обеспечивает полное управление в ПС. Например, контроллер 219 управляет коммутатором 217 при измерении запрашиваемого времени для позиционирования ПС, присваивает адрес для хранения данных выборок элементарного сигнала во временной памяти 218 с помощью коммутатора 217 и затем управляет сохраненными данными выборок элементарного сигнала для передачи в назначенное поисковое устройство 220, которое производит вычисление РВП и ОСШ для позиционирования ПС. Коммутатор 217 производит коммутацию для подачи выходных данных АРУ 214 во временную память 218 под управлением контроллера 219. Временная память 218 сохраняет данные прямого канала (то есть данные выборок элементарного сигнала), полученные через коммутатор 216 в соответствующем адресе, и затем обеспечивает подачу сохраненных данных в назначенное поисковое устройство 220 под управлением контроллера 219. Назначенное поисковое устройство 220 производит корреляцию данных выборок элементарного сигнала, полученных из временной памяти 218, с использованием уровня корреляции и ПШ-сдвига, полученного от контроллера 219, вычисляет ОСШ и РВП прямых пилот-сигналов с ОСШ большими, чем порог ОСШ, и обеспечивает подачу вычисленных ОСШ и РВП в контроллер 219. Значения ОСШ и РВП подаются в устройство обработки цифровых сигналов (УОЦС) для ПС, чтобы оценить ее местоположение, или в передатчик по обратному каналу для БС, чтобы оценить положение ПС.
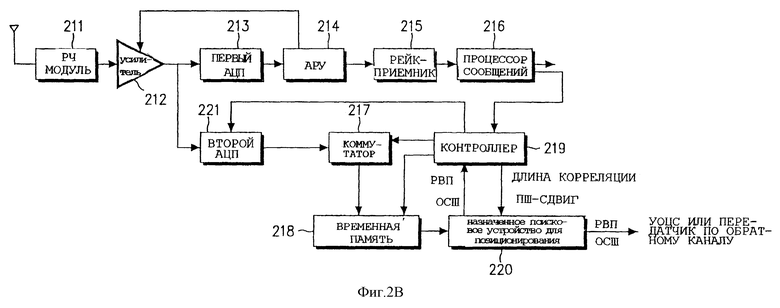
Фиг. 2В изображает блок-схему приемника ПС, дополнительно содержащего второй АЦП 221 в дополнение к элементам, показанным на фиг.2А, согласно второму варианту осуществления настоящего изобретения.
Как показано на фиг.2В, второй АЦП 221 управляет числом уровней квантования под управлением контроллера 219 для точного обнаружения пилот-сигнала с очень низким ОСШ. В известной ПС отсутствует необходимость в дополнительном АЦП, но дополнительный АЦП необходим для ПС, в которой используется назначенное поисковое устройство позиционирования, которое измеряет уровень множества пилот-сигналов. Контроллер 219 управляет числом уровней квантования (то есть устройством квантования) второго АЦП 221 на основании измеренного ОСШ активного пилот-сигнала. Так как ОСШ активного пилот-сигнала увеличивается, контроллер 219 увеличивает число уровней квантования. Например, ПС может установить выходной сигнал АЦП до 4 бит в качестве известного и число уровней квантования второго АЦП на 16 согласно второму варианту осуществления. Однако, если пилот-сигнал ВС, отличный от активного пилот-сигнала, имеет амплитуду сигнала в два раза меньше устройства квантования или ниже, то квантованный выходной сигнал содержит несколько составляющих пилот-сигнала БС. Поэтому контроллер 220 управляет величинами уровней квантования, которые будут более плотными за счет увеличения числа бит выходного сигнала второго АЦП 21 до 4, 8 или 16 бит или позволяет обнаружить пилот-сигнал с низким ОСШ путем установления 8, 12 или 16 бит по умолчанию. Выходным сигналом усилителя 212, который подается во второй АЦП 221, управляют с помощью АРУ 214. Выходной сигнал второго АЦП 221, который проходит через коммутатор 217, сохраняется во временной памяти 218. Контроллер 219 получает данные, принятые для назначенного периода времени, путем управления коммутатором 217.
Как описано выше, ПС принимает согласно первому и второму вариантам осуществления настоящего изобретения сохраненные данные выборок элементарного сигнала, принятые в течение заданного периода времени во временной памяти, и обрабатывает данные выборок элементарного сигнала с помощью автономной обработки в назначенном поисковом устройстве для того, чтобы вычислить значения РВП и ОСШ. Все входные прямые пилот-сигналы получают из сохраненных данных выборок элементарного сигнала, и, таким образом, фаза активного пилот-сигнала, которая обеспечивает начало отсчета времени для ПС, может оставаться постоянной.
В этом случае назначенное поисковое устройство увеличивает длину корреляции до тех пор, пока не будет обнаружено множество пилот-сигналов с максимальными точками корреляции. Стабильная максимальная точка корреляции относится к точке, в которой назначенное поисковое устройство получает непрерывно определенный максимум корреляции. Контролер 219 регулирует длину корреляции путем контроля выходного сигнала назначенного поискового устройства 220. Контроллер 219 передает уровень корреляции, которая используется для вычисления ОСШ и РВП, из предыдущих данных выборок элементарного сигнала в назначенное поисковое устройство 220 для вычисления текущего РВП и ОСШ из новых данных выборок элементарного сигнала, сохраненных во временной памяти 218. Когда полученный в результате максимальный пик корреляции больше, чем порог ОСШ, вычисляют значение РВП и ОСШ с помощью операции корреляции при уменьшенной длине корреляции, в случае, когда уменьшенная длина корреляции почти удовлетворяет порогу ОСШ, контроллер 219 использует эту длину корреляции при вычислении РВП и ОСШ из следующих данных выборок элементарного сигнала. Этот способ уменьшает потери мощности ПС и позволяет быстро определить местоположение ПС в случае, когда позиционирование ПС выполняется в относительно коротких интервалах времени.
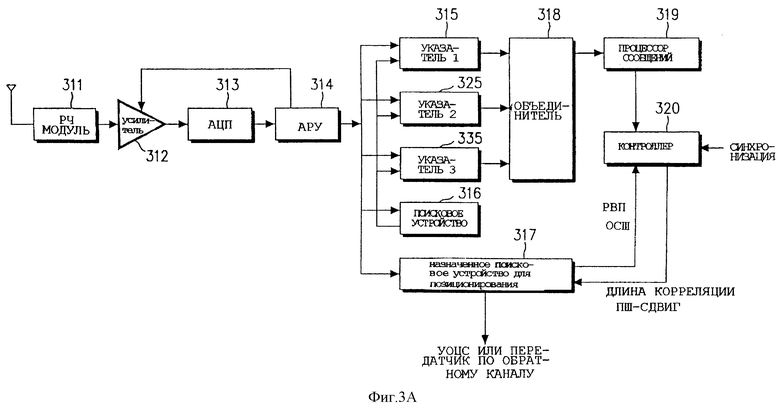
Фиг. 3А изображает блок-схему приемника ПС для непрерывного позиционирования согласно третьему варианту осуществления настоящего изобретения.
Как показано на фиг.3А, РЧ-модуль 311 преобразует с понижением частоты РЧ-сигнал, принимаемый антенной, в ПЧ сигнал и затем преобразует ПЧ сигнал в сигнал основной полосы частот. Усилитель 312 усиливает выходной сигнал РЧ-модуля 311 так, чтобы он соответствовал динамическому диапазону АЦП 313, под управлением АРУ 314. АЦП 313 преобразует выходной сигнал усилителя 312 в цифровой сигнал через дискретизацию и квантование. АРУ 314 регулирует усиление усилителя 312 для поддержания диапазона выходного сигнала усилителя 312 на заданном уровне. Указатели 315-335 получают сигналы с соответствующими фазами и снимают по спектру принимаемые сигналы. Поисковое устройство 316 осуществляет поиск принятых сигналов, при этом изменяя его фазу, и подает измеренную фазу в указатели 315-335. Объединитель 318 объединяет сигналы, принятые из указателей 315-335. Процессор 319 сообщений декодирует выходной сигнал объединителя 318 для восстановления первоначальных данных. В этом случае управляющие данные подаются в контроллер 320. Контроллер 320 обрабатывает восстановленные данные сообщений, которые поступают из процессора 319 сообщений, и обеспечивает полное управление в ПС. Контроллер 320 обеспечивает подачу длины корреляции и ПШ-сдвига в назначенное поисковое устройство 317 для измерения уровней по меньшей мере трех прямых пилот-сигналов БС. Назначенное поисковое устройство 317 осуществляет корреляцию прямых пилот-сигналов с использованием длины корреляции и ПШ-сдвига, производят вычисление ОСШ и РВП прямых пилот-сигналов с ОСШ большими, чем порог ОСШ, и обеспечивает подачу вычисленных ОСШ и РВП в контроллер 320.
Фиг. 3В изображает блок-схему приемника ПС, дополнительно содержащего второй АЦП 321, помимо элементов, показанных на фиг.3А, согласно четвертому варианту осуществления настоящего изобретения.
Как показано на фиг. 3В, второй АЦП 321 используется для получения квантованного выходного сигнала соседнего пилот-сигнала с низким ОСШ аналогично второму АЦП 221 (фиг.2В). АЦП 321 изменяет уровень квантования на основании ОСШ активного пилот-сигнала или устанавливает уровень квантования на 4 или более бит (например, 8, 12 и 16 бит) с начала.
Как описано выше, приемники ПС, показанные на фиг.3А и 3В, отличаются от настоящего приемника ПС МДКР тем, что они дополнительно содержат структуру рейк-приемника (три указателя и одно поисковое устройство) для вызова в известном смысле слова и назначенное поисковое устройство для обнаружения множества прямых пилот-сигналов. В этом случае коммутатор и временная память, показанные на фиг.2А и 2В, необязательны. Однако, так как назначенное поисковое устройство обнаруживает один прямой пилот-сигнал в одно время в ПС (фиг.3А и 3В), фазу активного пилот-сигнала можно изменять, хотя точки с максимумами корреляции других пилот-сигналов обнаруживаются, приводя к погрешностям значений РВП. Затем контроллер управляет выходным сигналом назначенного поискового устройства для того, чтобы назначенное поисковое устройство не выполняло корреляцию всех сдвигов пилот-сигнала в списке соседей, а только для 5-6 пилот-сигналов с высокими ОСШ. Затем можно вычислить РВП почти в то же самое время.
Фиг. 4 изображает блок-схему назначенного поискового устройства для приемников ПС, показанных на фиг.2А-2В.
Назначенное поисковое устройство (фиг.4) можно вновь сконфигурировать или модифицировать по сравнению с существующим поисковым устройством путем добавления блока устройства слежения за временем в элементах существующего поискового устройства для минимизации ошибки разрешения во времени РВП. Назначенное поисковое устройство построено с возможностью обнаружения пилот-сигналов снова в 1/8 или менее блоков элементарных сигналов по отношению к самому раннему пику траектории, превышающему порог ОСШ после грубого получения, то есть обнаружения пилот-сигнала в 1/2 или 1 блоках элементарного сигнала, выполненных в известном поисковом устройстве. В настоящем изобретении блок поискового устройства выполняет грубый прием и затем устройство слежения за временем выполняет поиск с точным разрешением. Хотя устройство слежения за временем производит поиск оптимального РВП, причем блок поискового устройства может производить поиск пилот-сигнала с другим ПШ-сдвигом пилот-сигнала. Преимущество схемы заключается в том, что время, требуемое для обнаружения оптимального РВП из одного пилот-сигнала, уменьшается по сравнению с поиском 1/2 и 1/8 элементарного пилот-сигнала при конструировании с условием той же самой сложности аппаратной части.
Как показано на фиг.4, поисковое устройство 411 выполняет ту же самую функцию, как и существующее поисковое устройство, за исключением того, что он не производит классификацию заданного числа высших максимумов корреляции, но сохраняет все максимумы корреляции, которые больше порога ОСШ. То есть поисковое устройство 411 обнаруживает максимумы искомых пилот-сигналов и выводит индексы сдвига во времени (задержки во времени) и ОСШ максимумов. В этом случае индекс сдвига во времени относится к задержке в распространении сигнала в ПС от его начала отсчета времени.
Селектор 412 траектории обнаруживает индекс сдвига во времени, соответствующий самой ранней траектории, среди индексов сдвига во времени, полученных от поискового устройства 411, и выводит ОСШ в момент времени, соответствующий индексу сдвига во времени. Индекс сдвига во времени с самой ранней траектории может отличаться от индекса сдвига активного пилот-сигнала, который обеспечивает подачу начала отсчета времени в ПС, и ее разность компенсируется в течение времени, когда РВП окончательно выводится.
Генератор 413 ПШ кодов вырабатывает ПШ код соответствующего пилот-сигнала на основании индекса сдвига во времени, полученного из селектора 412 траектории. Эта процедура является такой же, как и известный процесс, в котором известный указатель принимает индекс сдвига из поискового устройства и вырабатывает ПШ код соответствующего пилот-сигнала согласно индексу сдвига во времени.
Дециматор 414 выводит 1/2 элементарного сигнала (Тс/2) самой ранней выборки и 1/2 элементарного сигнала (Тс/2) более поздней выборки с текущим временем выборки для модификации синхронизации его выборки для самого высокого максимума корреляции.
Коррелятор 415 производит корреляцию ПШ кода, полученного от генератора 413 ПШ кодов, с выходным сигналом дециматора 414. Так как дециматор 414 выводит раннюю составляющую сигнала и позднюю составляющую сигнала, корреляция выполняется с ранними выборками сигнала и поздними выборками сигнала.
Устройство 416 слежения за временем принимает раннее значение корреляции сигнала и позднее значение корреляции сигнала, вычисляет значение компенсации сдвига во времени на 1/8 блоков элементарного сигнала или меньше блоков и вырабатывает полученное в результате значение компенсации в качестве управляющего сигнала для дециматора 414. Кроме того, дециматор 414 регулирует точку прореживания согласно выходному сигналу устройства 416 слежения за временем.
Накопитель 417 накапливает значение компенсации сдвига во времени устройства 416 слежения по времени и выводит значение накопления в устройство 418 суммирования.
Устройство 418 суммирования вычисляет полную задержку во времени на основании суммы индекса сдвига с более ранней траектории, полученной от селектора 412 траектории, и значения компенсации задержки во времени, принятое от накопителя 417. То есть выходной сигнал устройства 418 суммирования представляет собой относительное значение РВП по отношению к начальному отсчету времени ПС.
Когда более ранняя траектория активного пилот-сигнала изменяется и происходит ошибка начального отсчета времени, хотя ПС работает в соответствии со служебной БС или фазой активного пилот-сигнала, компенсатор 419 начального отсчета времени компенсирует ошибку начального отсчета времени, компенсирует РВП, связанные с другими пилот-сигналами с применением компенсации начального момента времени, и таким образом выводят точные значения РВП.
В общем, поисковое устройство обнаруживает пилот-сигналы в следующем порядке: активный (t0), соседний 1 (t1+t0), соседний 2 (2•t1+t0),... соседний N (N•t1+t0), активный ((N+1)•t1+t0), соседний 1 ((N+2)•t1+t0), соседний 2 ((N+3)•t1+t0), . . . соседний N (2•N•t1+t0), активный ((2•N+1)•t1+t0), . .. В этом случае содержимое в ( ) показывает время обнаружения. Если время обнаружения активного пилот-сигнала равно t0 и время, при котором другой пилот-сигнал начинает обнаруживаться, равно (t0+t1), время измерения 10-го пилот-сигнала равно t0+10•t1. Так как поисковое устройство обнаруживает пилот сигналы периодически/последовательно, фаза активного пилот-сигнала может изменяться при обнаружении соседних пилот-сигналов. Однако настоящее изобретение позволяет обнаруживать только несколько соседних пилот-сигналов с высокими ОСШ для получения РВП почти в то же самое время, и компенсатор 419 начального отсчета времени (фиг. 4) компенсирует это изменение во времени текущего отсчета времени в первоначальном отсчете времени, которое получается при обнаружении активного пилот-сигнала.
Фиг. 5 изображает алгоритм, показывающий операцию управления для ПС, при которой контроллер управляет назначенным поисковым устройством для определения местоположения ПС с использованием множества РВП и ОСШ. Хотя операция управления применима к любому из приемников ПС, показанных на фиг.2А-3В, следующее описание приводится в контексте приемника ПС, показанного на фиг. 2А.
Как показано на фиг. 5, контроллер 219 определяет длину корреляции N(2K(1)) для использования в коррелирующих данных выборки элементарного сигнала, сохраненных во временной памяти 218 при операции 511 и ПШ-сдвиг при операции 513. Длина корреляции применялась к предыдущим данным выборки элементарного сигнала, а ПШ-сдвиг выбирается из информации о соседних БС, полученной от исходной БС и соседних пилот-сигналов с высокими ОСШ. Назначенное поисковое устройство 220 производит корреляцию данных выборки элементарного сигнала, полученных из памяти 218, с длиной корреляции и ПШ-сдвига и выводит результирующие РВП и ОСШ в контроллер 219 при операции 515. В этом случае назначенное поисковое устройство 220 выводит только РВП и ОСШ пилот-сигналов с ОСШ, которые больше, чем порог ОСШ в УОЦС или обратный приемник под управлением контроллера 219.
Контролер 219 контролирует выходной сигнал назначенного поискового устройства 220 для определения, был ли получен при операции 517 пилот-сигнал с ОСШ, большим, чем порог ОСШ. Порог ОСШ устанавливается на значение, равное или большее, чем значение корреляции сигнала помехи, определенного с помощью длины корреляции. Если значение равно или больше порога, контроллер 219 переходит к операции 519. Если нет, то он переходит к операции 521. При операции 519 контроллер 219 определяет, были ли получены от различных БС по меньшей мере три пилот-сигнала. Если число полученных сигналов равно по меньшей мере трем, контроллер 219 переходит к операции 531. Если число полученных сигналов меньше трех, контроллер 219 переходит к операции 521.
В случае по меньшей мере трех полученных сигналов при операции 519 получают по меньшей мере три пары РВП-ОСШ. Например, предполагают, что пилот-сигналы i, j и k заданы и пилот-сигнал i является активным пилот-сигналом, вычисленными значениями РВП являются РВПi,j (время поступления пилот-сигнала i - время поступления пилот-сигнала j), РВПik и PBHjk и вычисленными значениями ОСШ являются OCШi, OCШj и ОСШk. Поэтому контроллер 219 оценивает оптимальное местоположение на основании значений РВП и ОСШ при операции 531. Вышеприведенная процедура применяется в случае, если ПС принимает по меньшей мере три пилот-сигнала от различных БС.
В случае менее трех полученных сигналов при операции 519 контроллер 219 определяет, были ли получены (скоррелированы) все соседние пилот-сигналы, то есть была ли завершена операция корреляции со значениями ПШ-сдвига, предварительно заданными для позиционирования ПС при операции 521. Если операция корреляции завершена, то контроллер 219 переходит к операции 523. Если определено, что сдвиги ПС остаются для корреляции, контроллер 219 возвращается к операции 513 для выполнения операции корреляции входного сигнала с ПШ-сдвигом другого соседнего пилот-сигнала.
При операции 523 контроллер 219 определяет, достигает ли максимального значения длина корреляции. Если длина корреляции является максимальной, контроллер 219 переходит к операции 525, если нет, то контроллер 219 переходит к операции 535. Контроллер 219 увеличивает длину корреляции на одну единицу при операции 535 и возвращается к операции 515 для выполнения корреляции.
При операции 525 контроллер 219 определяет, получено ли два сигнала с ОСШ большими, чем порог ОСШ. Если число полученных сигналов равно двум, то контроллер 219 переходит к операции 527. С другой стороны, если число полученных сигналов меньше двух, контроллер 219 выполняет программу отказа определения местоположения при операции 537.
В случае двух обнаруженных пилот-сигналов контроллер 219 определяет, были ли получены два сигнала от одной базовой станции при операции 527. Если два сигнала были получены от одной базовой станции, контроллер 219 переходит к операции 533. Если они были получены от других БС, контроллер 219 переходит к операции 529.
При операции 529 контроллер 219 оценивает оптимальное местоположение ПС на основании одного РВП (РВПij) и двух ОСШ (OCШi и OCШj), полученных из двух полученных пилот-сигналов.
Таким образом, описан второй способ.
Если два сигнала принимают от одной БС при операции 527, то контроллер 219 оценивает направление ПС на основании значений ОСШ, принятых от назначенного поискового устройства 220, и производит вычисления расстояния между ПС и БС с использованием ЗПС, вычисленной с помощью активной БС, таким образом оценивая окончательное положение при операции 533. Это является третьим способом позиционирования ПС. В этом случае операции 529, 531 и 533 выполняются в ПС или в системе верхнего уровня в течение измерения местоположения ПС.
Как описано выше, местоположение ПС можно определить тремя способами: (1) когда по меньшей мере три пилот-сигнала принимают от различных БС, как при операции 531, (2) два пилот-сигнала обнаруживают от различных БС, как при операции 529, и (3) два пилот-сигнала принимают от одной БС, как при операции 533.
Ниже со ссылкой на фиг.6А и 6В описывается первый способ.
Сначала со ссылкой на фиг.6А описывается определение местоположения ПС с использованием трех РВП. Вычислитель 612 производит вычисление значений РВП: РВПij, РВПik и РВПjk пилот-сигналов i, j и k различных БС, принятых от назначенного поискового устройства 611. Устройство хранения 613 создает карту РВП из РВП пилот-сигналов, принятых в положениях (х, у) от БС, расположенных в i, j и k. То есть РВП пилот-сигналов i, j и k, принятых в ПС в местоположении (х, у), вычисляют и сохраняют. Затем компаратор 614 сравнивает три комбинации РВП (PBПij, РВПik), (РВПij, РВПjk) и (РВПik, PBПjk) с картой РВП и получает лучшее согласование координат положения (х1, у1), (х2, у2) и (х3, у3). Фильтр 615 производит фильтрацию сигналов, представляющих три координаты местоположения, и получает окончательное местоположение (X, У) ПС. В этом случае фильтр является фильтром со скользящим усреднением.
Ниже со ссылкой на фиг.6В описывается способ позиционирования ПС с тремя ОСШ. Вычислитель 622 производит вычисление ОСШ, OCШi, OCШj, OCШk пилот-сигналов i, j и k различных БС, принятых от назначенного поискового устройства 621. Устройство хранения 623 производит вычисление ОСШ каждого пилот-сигнала БС, принятого в любом местоположении (х, у) с учетом всех факторов, влияющих на ОСШ, включая местопложение, усиление антенны и высоту антенны каждой БС, и создает карту с предварительно вычисленными ОСШ. Компаратор 624 производит сравнение трех ОСШ с картой ОСШ и получает местоположение (х, у) с лучшим согласованием. Фильтр 625 производит фильтрацию трех результатов и получает окончательное местоположение (X, У). В этом случае фильтр является фильтром со скользящим усреднением. Окончательное местоположение ПС определяют путем сравнения местоположения РВП и местоположения ОСШ. В этом случае можно дополнительно принимать в расчет, что фильтруют не местоположение РВП, а местоположение ОСШ, и усредняют полученное в результате местоположение РВП и ОСШ, таким образом получая местоположение ПС с окончательной оценкой.
Ниже со ссылкой на фиг.7 описывается второй способ.
Вычислитель 712 производит вычисление ОСШ и РВП, OCШi, OCШj и PBПij пилот-сигналов i и j различных БС, принятых от назначенного поискового устройства 711. Устройство хранения 713 производит вычисление ОСШ каждого пилот-сигнала ПС, принятого в любом местоположении (х, у), с учетом всех факторов, влияющих на ОСШ, включая местоположение, усиление антенны и высоту антенны каждой БС, и создает карту ОСШ. Устройство хранения 713 также создает карту РВП из РВП пилот-сигналов i и j, принятых в произвольном положении (х, у). То есть вычисляют и сохраняют РВП пилот-сигналов i и j, принятых в ПС, в местоположении (х, у). Затем компаратор 714 сравнивает OCШi, ОСШj и PBПij с картами ОСШ и РВП и получает местоположение с наилучшим согласованием (местоположения с наилучшим согласованием). Фильтр 715 производит фильтрацию сигналов, представляющих три местоположения, и получает окончательное местоположение (X, У) ПС. В этом случае фильтр является фильтром со скользящим усреднением. Как описано выше, второй способ применяется в случае, когда принимают только два различных пилот-сигнала ВС с ОСШ большими, чем порог ОСШ. То есть вероятные местоположения ПС выражаются в виде параболы с РВП двух пилот-сигналов и местоположения ОСШ, аппроксимированные для измеренных ОСШ, обнаруживают на параболе.
Ниже со ссылкой на фиг.8 описывается третий способ.
Вычислитель 812 производит вычисление ОСШ, OCШi и OCШj пилот-сигналов i и j БС, принятых от назначенного поискового устройства 811. Устройство хранения 813 вычисляет отношения ОСШ пилот-сигналов i и j, принятых в произвольном местоположении (х, у), из различных секторов одной и той же БС на основании информации о направлении сектора, поперечном сечении сектора и диаграммы направленности по мощности передачи антенны БС, и сохраняет информацию об отношениях ОСШ. Затем компаратор 814 получает направление ПС по отношению к БС из информации ОСШ, и фильтр 815 производит фильтрацию сигнала, представляющего направление ПС, и получает окончательное местоположение ПС. В этом случае фильтр является фильтром со скользящим усреднением. Вычислитель 817 расстояний вычисляет расстояние между ПС и БС (ЗПС/2• скорость света) из модема 816 БС. Устройство 818 оценки местоположения производит оценку местоположения ПС по отношению к БС на основании отфильтрованного направления ПС и измеренного расстояния. Как описано выше, третий способ применяется в случае, когда не принимают достаточное число пилот-сигналов с ОСШ большими, чем порог ОСШ, а принимают два пилот-сигнала от одной и той же БС. То есть направление ПС оценивают по отношению к центру БС с использованием ОСШ двух обнаруженных пилот-сигналов и вычисляют расстояние между БС и ПС, таким образом оценивая окончательное местоположение ПС.
Согласно настоящему изобретению, которое описано выше, местоположение ПС определяют с использованием сигналов прямого канала, а назначенное поисковое устройство используют для эффективного получения данных. Назначенное поисковое устройство получает сигналы от других ПС, а также служебной БС в соответствии с одним способом уменьшения интерференции сигнала, что позволяет таким образом определить местоположение ПС. Кроме того, позиционирование на основе РВП и позиционирование на основе ОСШ согласно вариантам осуществления настоящего изобретения увеличивает точность, с которой определяется местоположение ПС.
Изобретение относится к беспроводной связи, а более конкретно к устройству и способу определения местоположения подвижной станции, работающей в системе подвижной связи. Технический результат - определение местоположения подвижной станции путем измерения разности времени поступления сигналов и отношения сигнал/шум прямых пилот-сигналов. В устройстве определения местоположения подвижной станции (ПС) подвижная станция принимает сигналы, синхронизированные с заданным временем, по меньшей мере от трех соседних базовых станций (БС) и располагается в пределах служебной БС, по меньшей мере трех БС, аналого-цифровой преобразователь преобразует принятые сигналы БС в цифровые данные выборок элементарного сигнала, память сохраняет данные выборок элементарного сигнала, назначенное поисковое устройство обнаруживает по меньшей два сигнала с помощью корреляции данных выборок элементарного сигнала, принятых из памяти с помощью автономной обработки, и вычисляет отношения сигнал/шум (ОСШ) и разность времени поступления (РВП) двух сигналов, а контроллер оценивает местоположение ПС на основании значений ОСШ и РВП, принятых от назначенного поискового устройства. 5 с. и 25 з.п.ф-лы, 11 ил.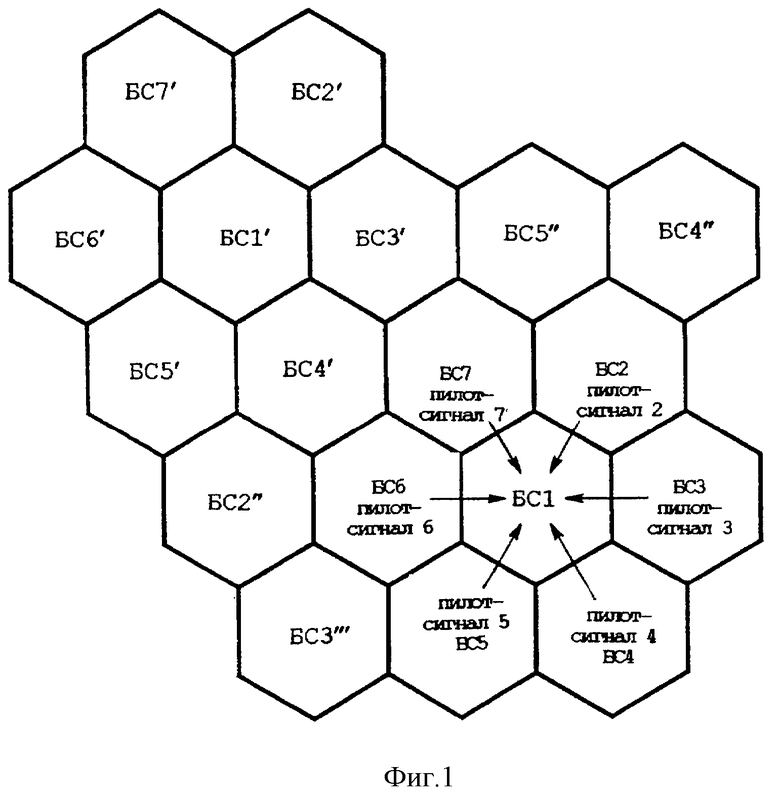
| US 5512908 A, 30.04.1996 | |||
| СПОСОБ РЕГИСТРАЦИИ ПОДВИЖНОГО КОММУНИКАЦИОННОГО УСТРОЙСТВА | 1994 |
|
RU2107397C1 |
| US 5327144 A, 05.07.1994 | |||
| US 5600706 A, 04.02.1997 | |||
| Машина для уборки соцветий лекарственных растений | 1972 |
|
SU470272A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

